
2017 Vol.31(5)
Display Mode: |
2017, 31(5): 517-527.
doi: 10.1007/s13344-017-0060-z
Abstract:
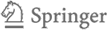
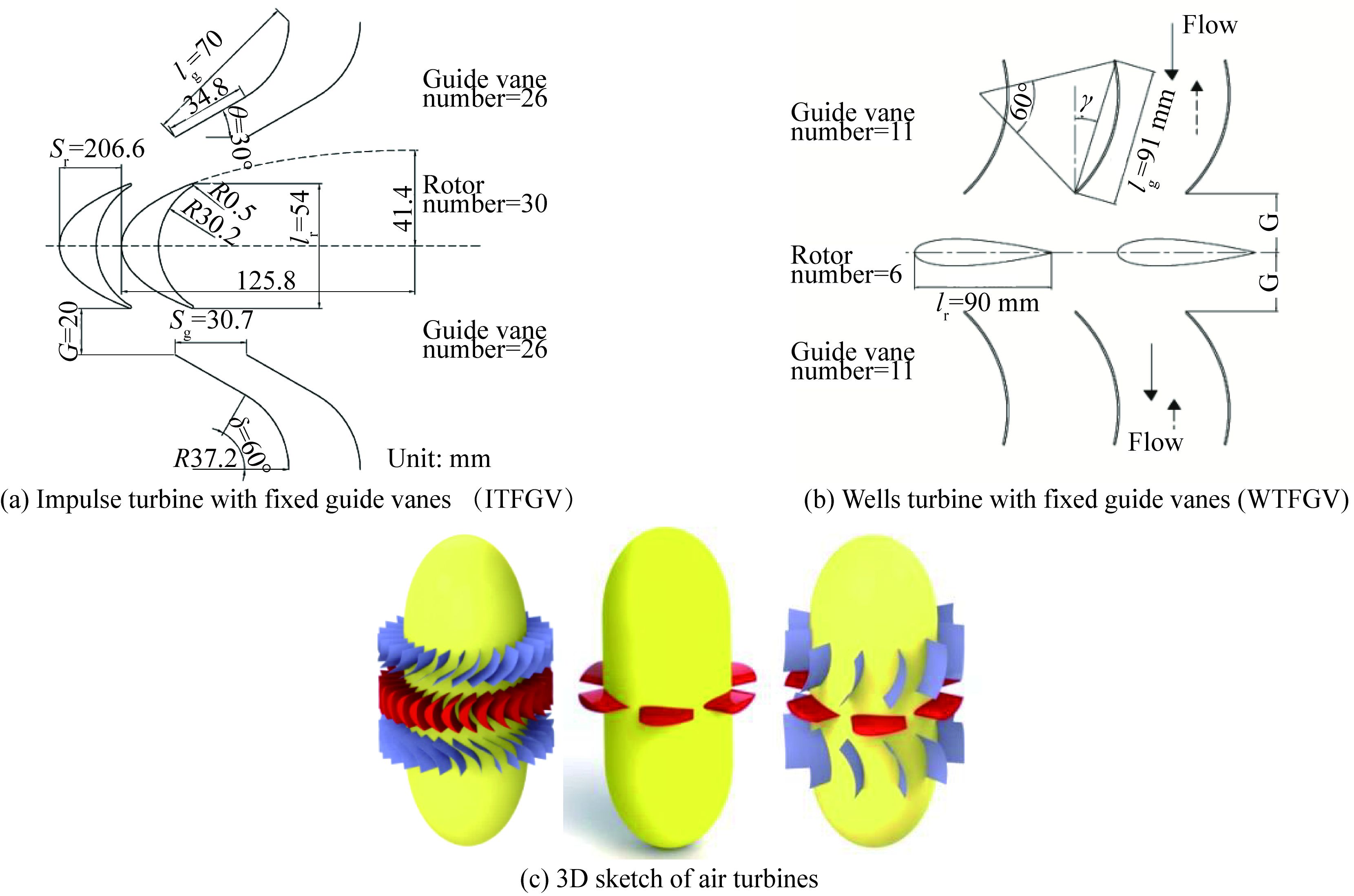
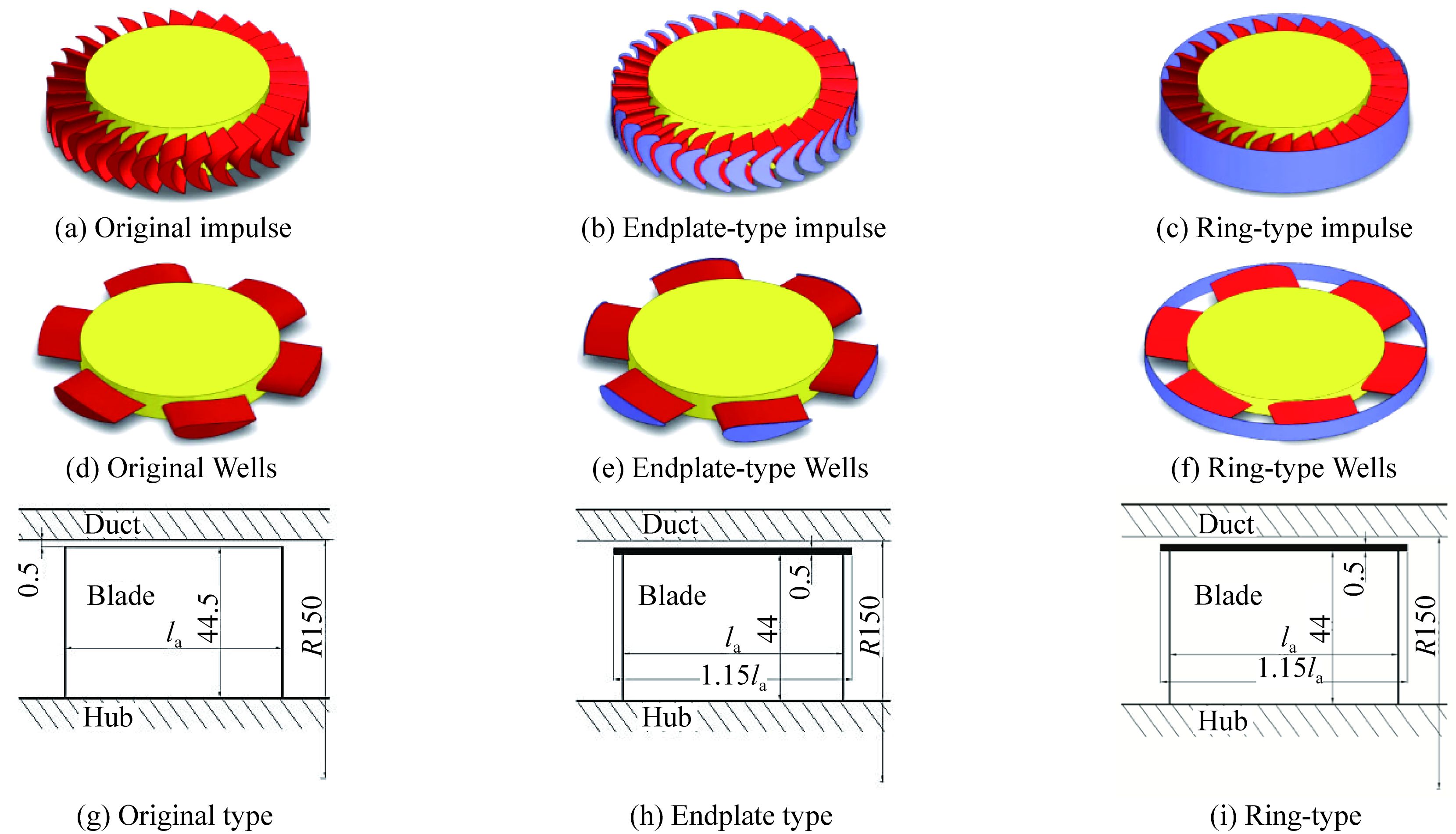
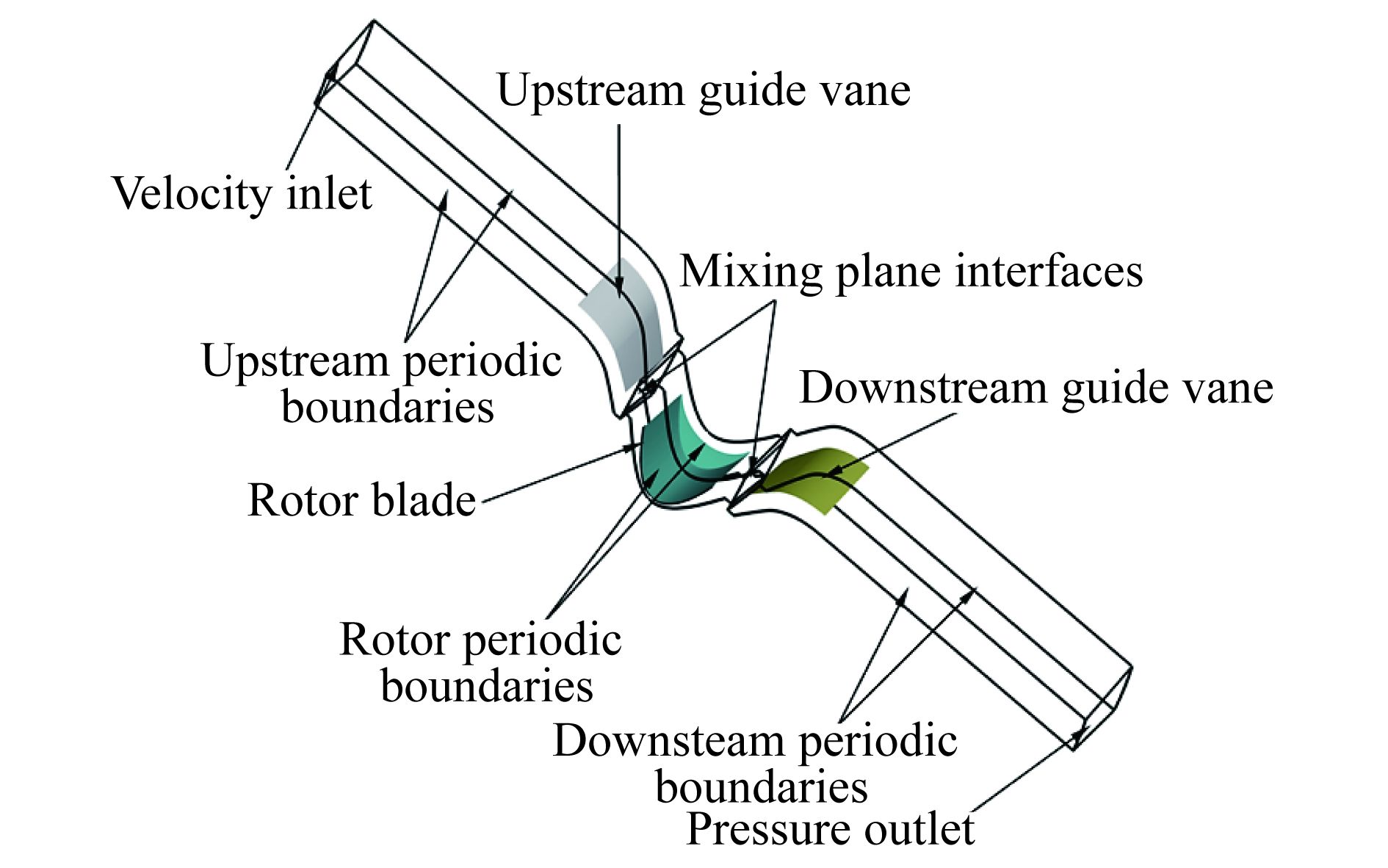
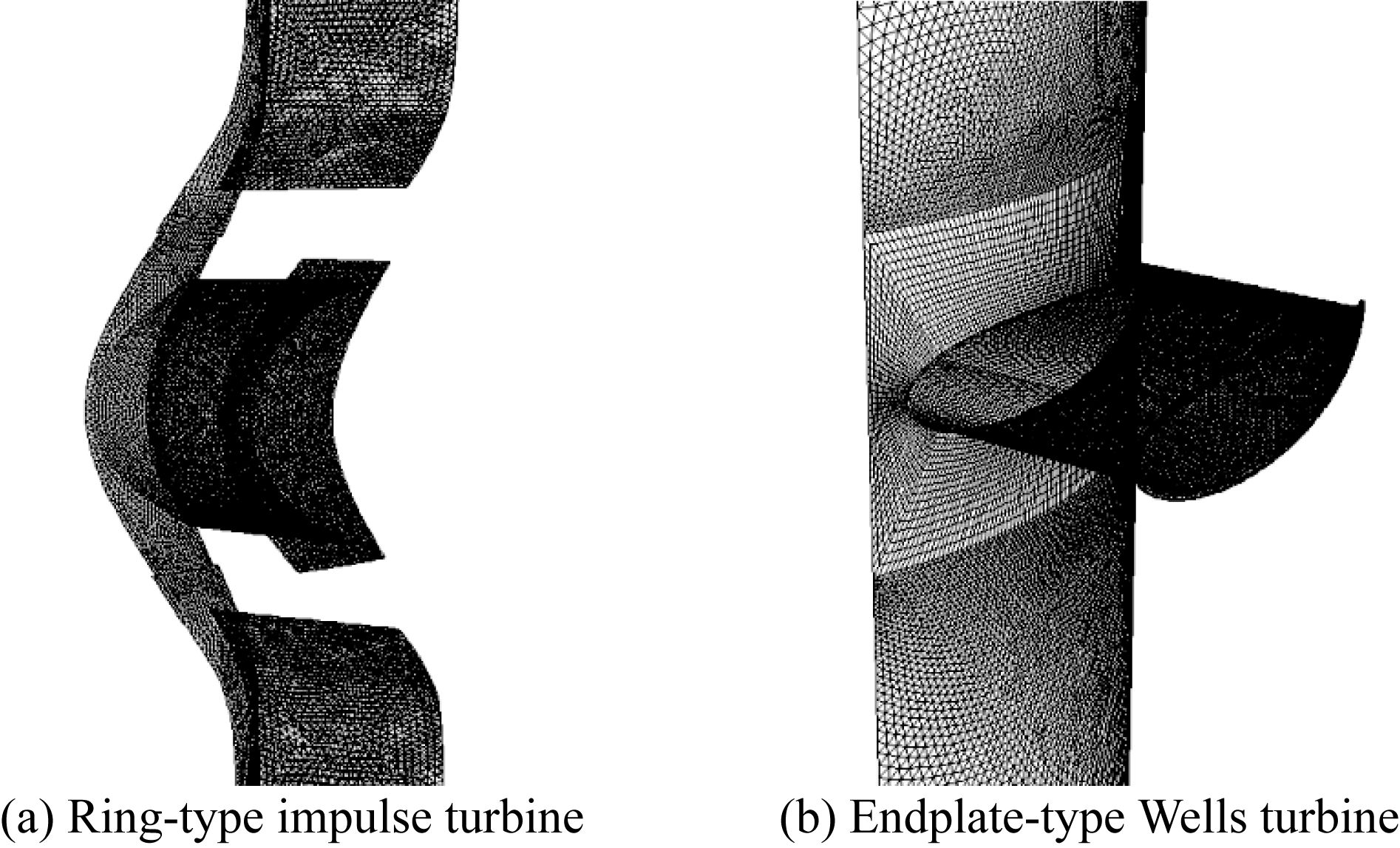
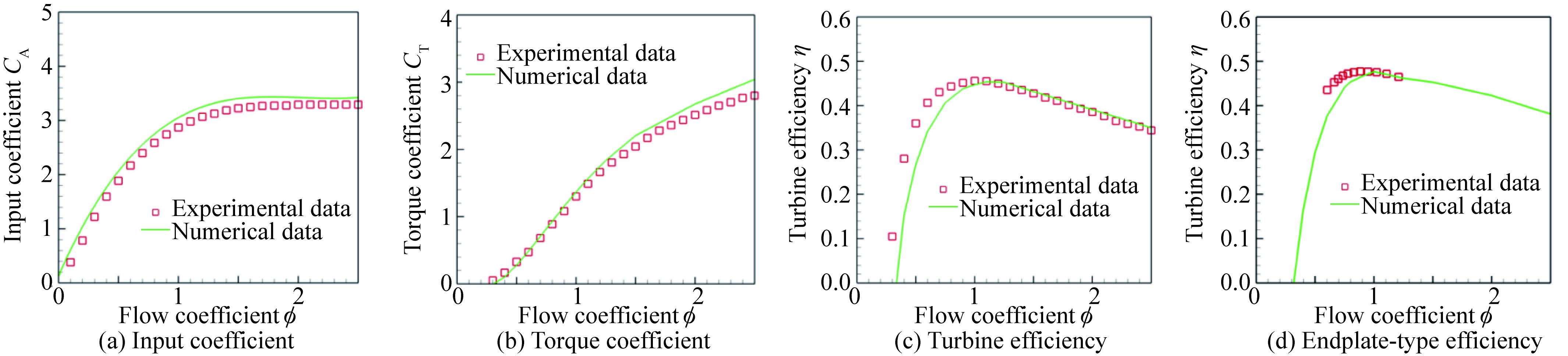
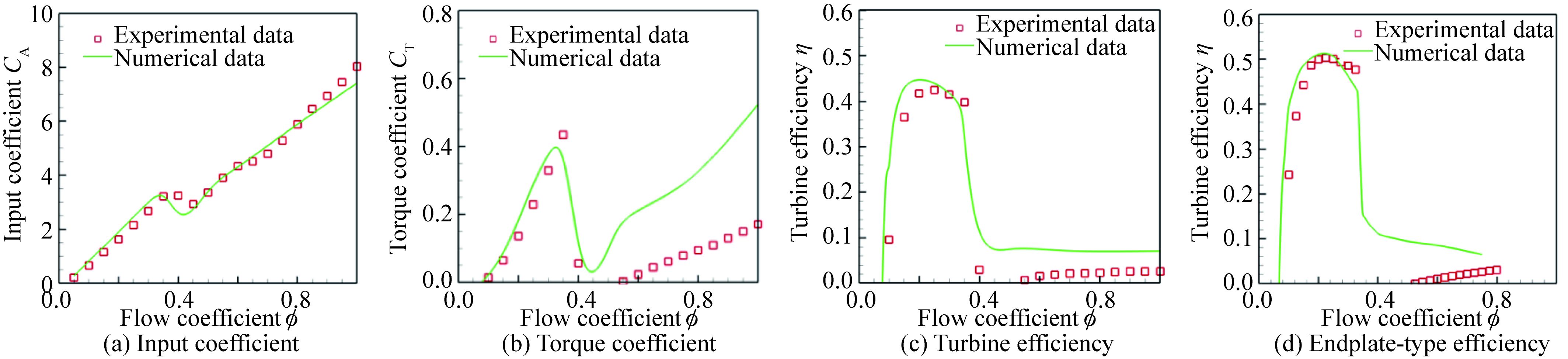
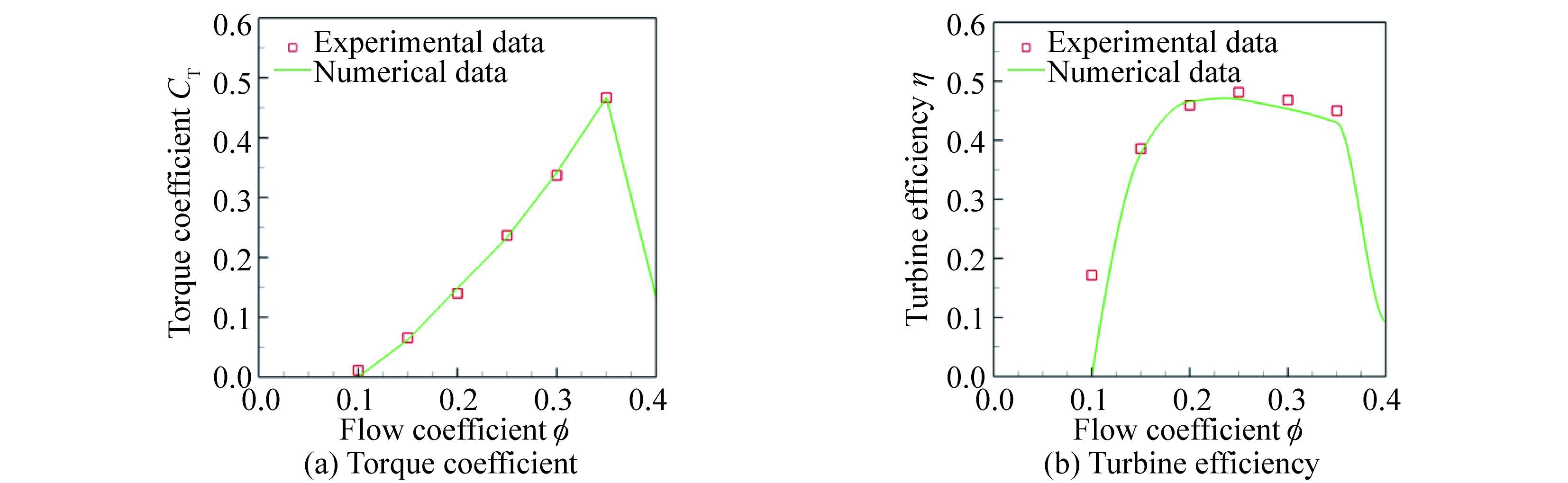
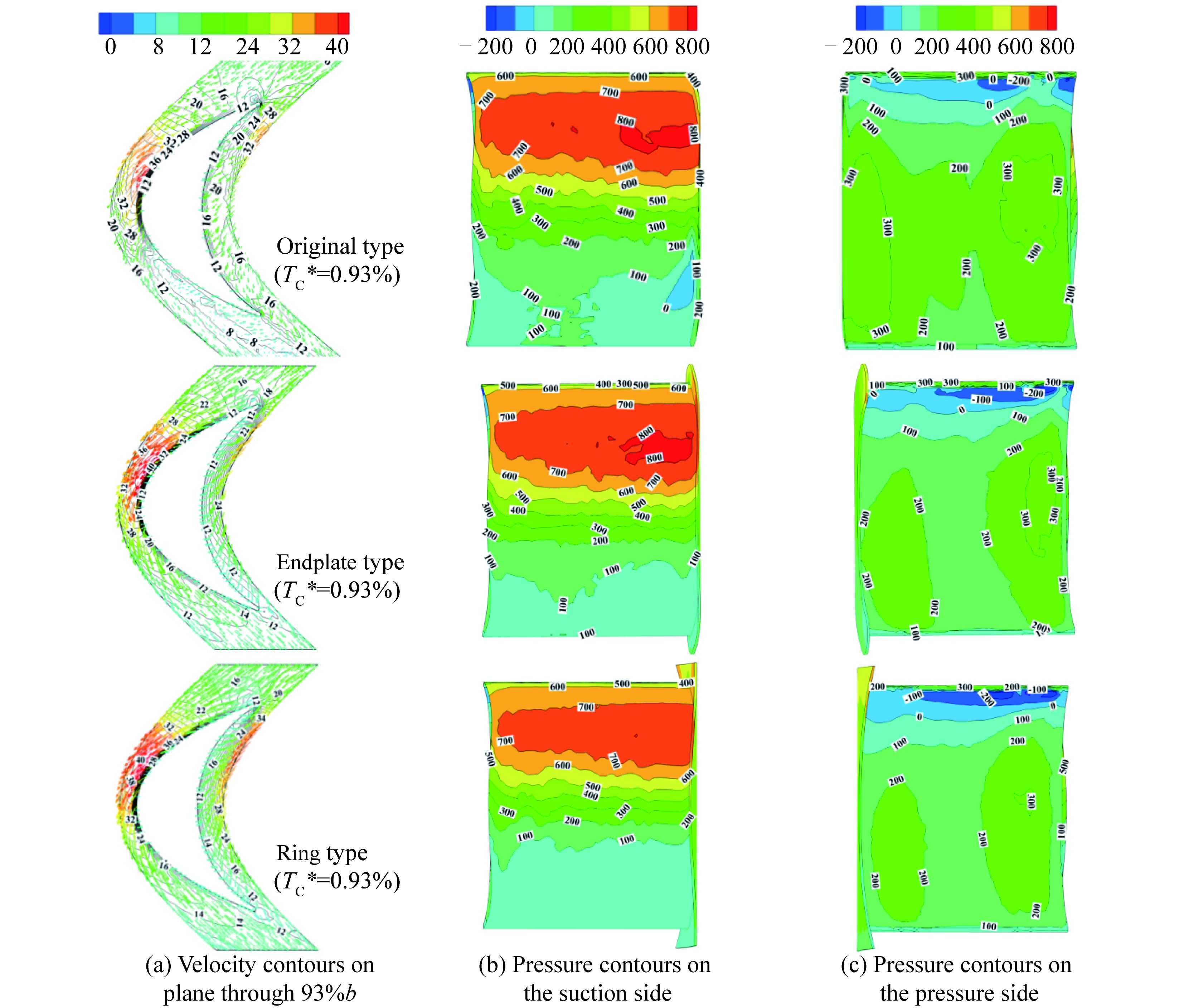
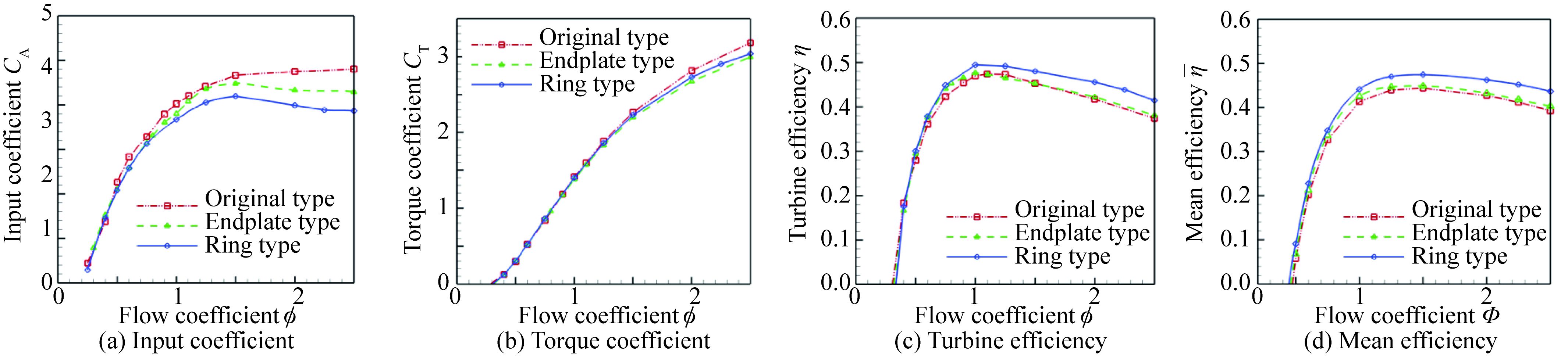
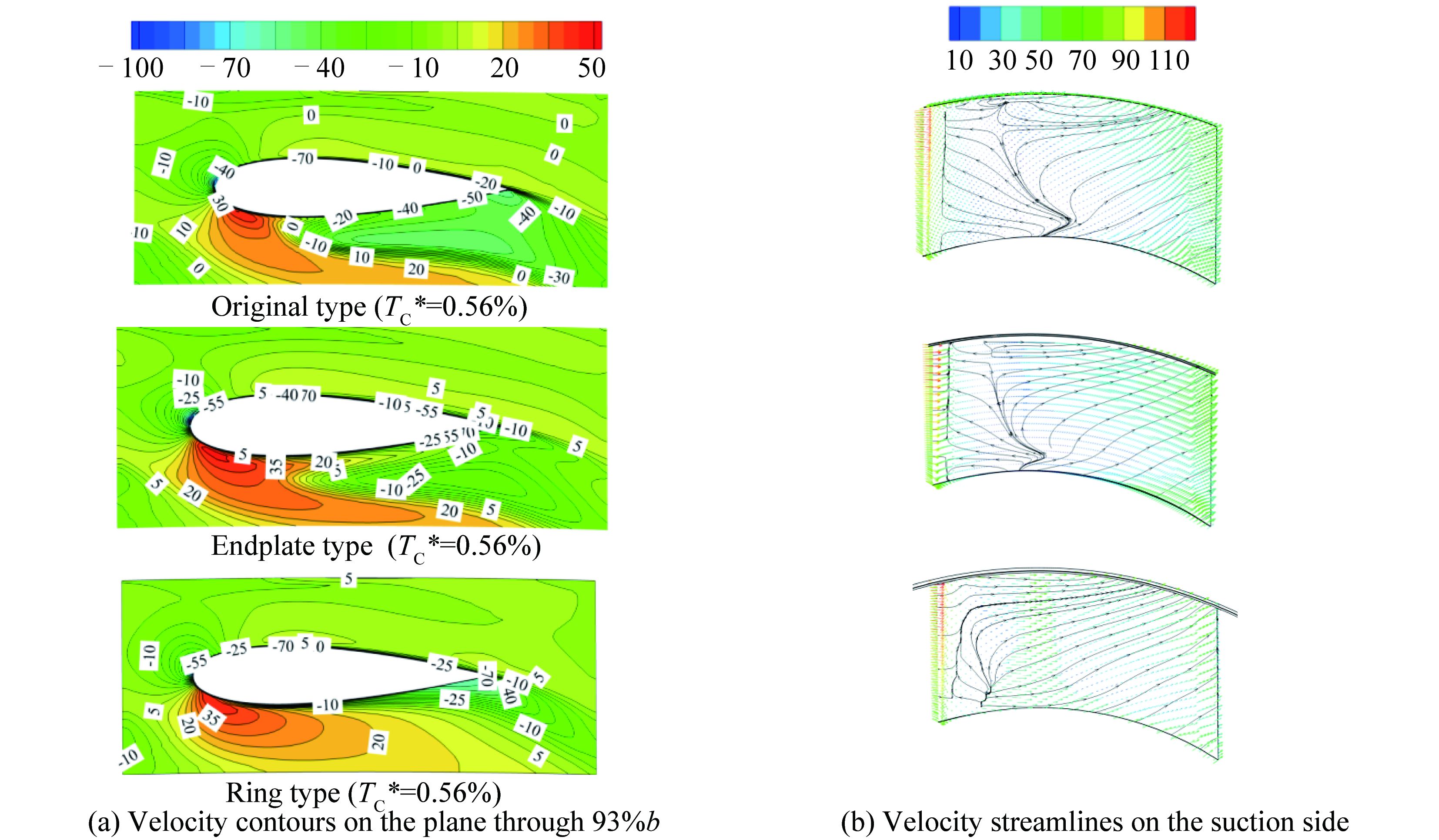
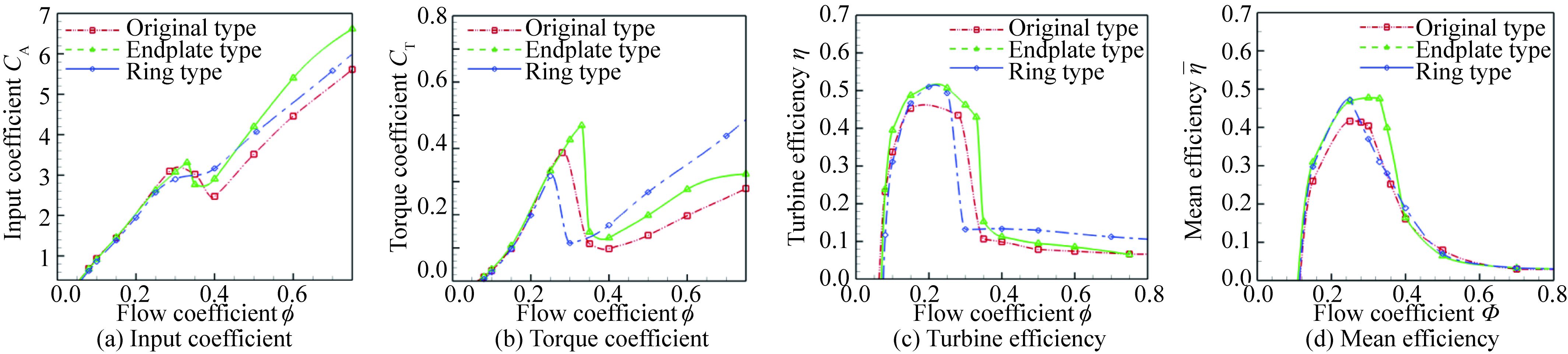
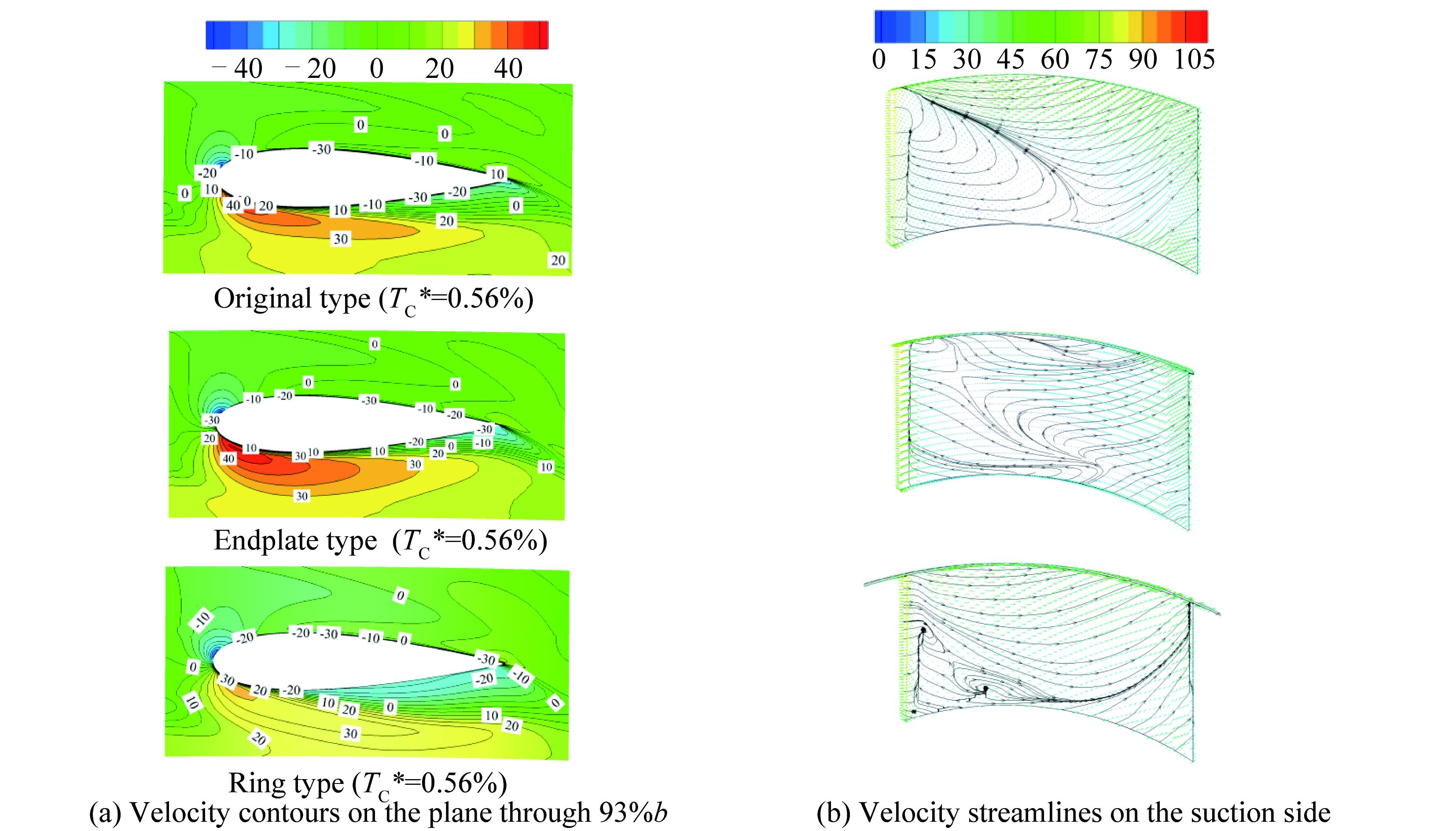
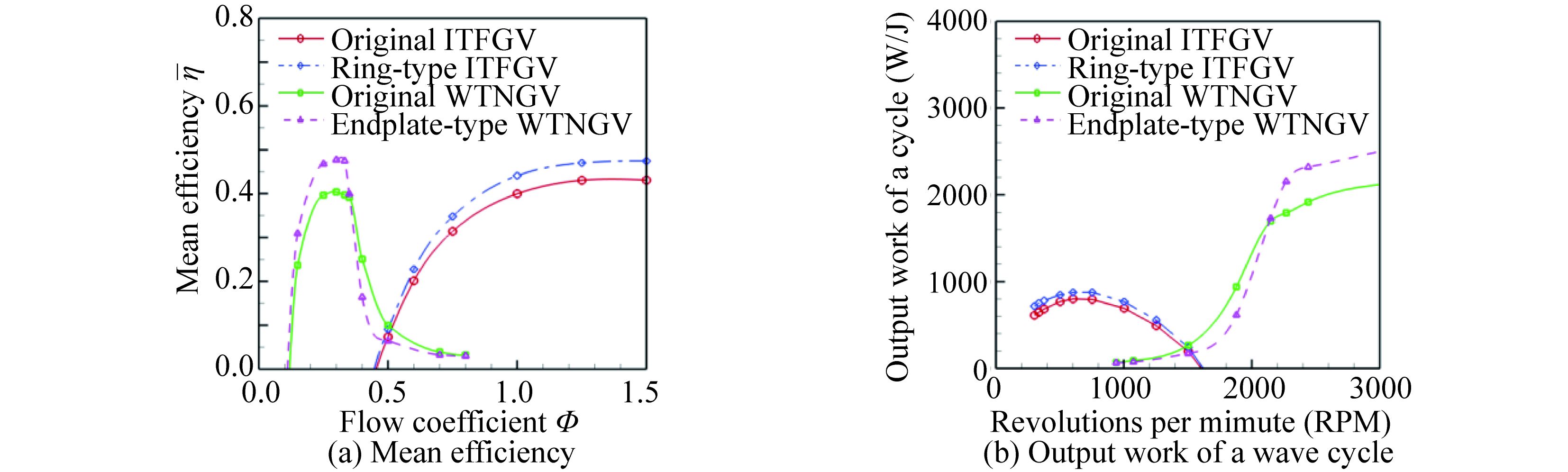
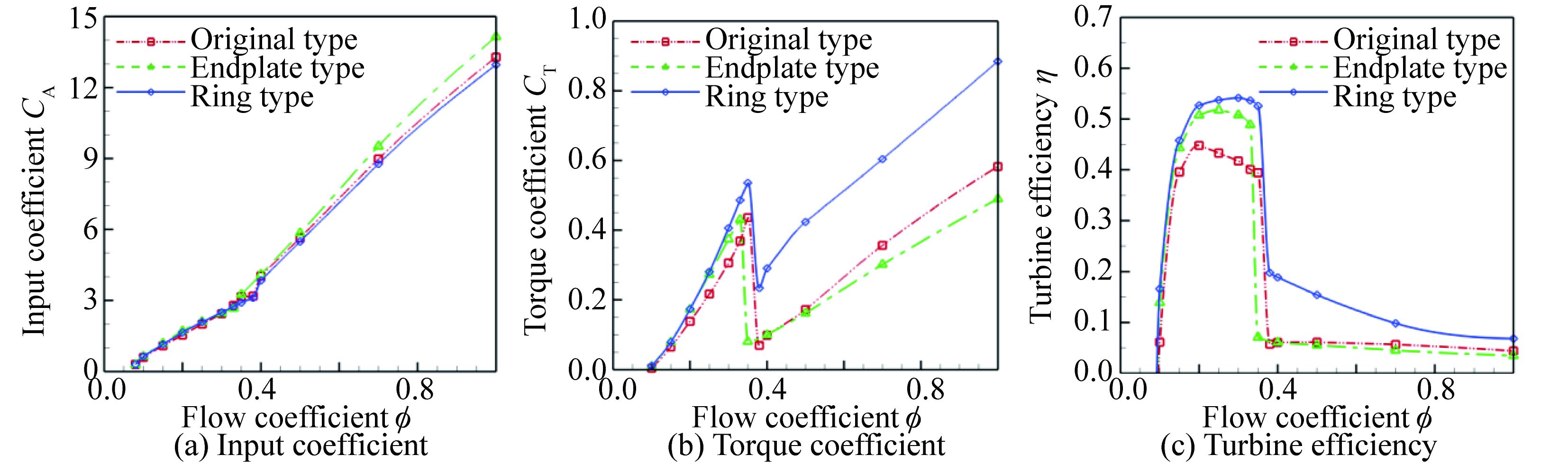
In recent years, the oscillating water column (OWC) wave energy converter, which can capture wave energy from the ocean, has been widely applied all over the world. As the essential part of the OWC system, the impulse and Wells turbines are capable of converting the low pressure pneumatic energy into the mechanical shaft power. As an enhanced technique, the design of endplate or ring attached to the blade tip is investigated numerically in this paper. 3D numerical models based on a CFD-software FLUENT 12.0 are established and validated by the corresponding experimental results from the reports ofSetoguchi et al. (2004) and Takao et al. (2001) . Then the flow fields and non-dimensional evaluating coefficients are calculated and analyzed under steady conditions. Results show that the efficiency of impulse turbine with ring can reach up to 0.49 when ϕ=1, which is 4% higher than that in the cases for the endplate-type and the original one. And the ring-type Wells turbine with fixed guide vanes shows the best performance with the maximal efficiency of 0.55, which is 22% higher than that of the original one. In addition, the quasi-steady analysis is used to calculate the mean efficiency and output-work of a wave cycle under sinusoidal flow condition. Taking all together, this study provides support for structural optimization of impulse turbine and Wells turbine in the future.
In recent years, the oscillating water column (OWC) wave energy converter, which can capture wave energy from the ocean, has been widely applied all over the world. As the essential part of the OWC system, the impulse and Wells turbines are capable of converting the low pressure pneumatic energy into the mechanical shaft power. As an enhanced technique, the design of endplate or ring attached to the blade tip is investigated numerically in this paper. 3D numerical models based on a CFD-software FLUENT 12.0 are established and validated by the corresponding experimental results from the reports of

2017, 31(5): 528-538.
doi: 10.1007/s13344-017-0061-y
Abstract:
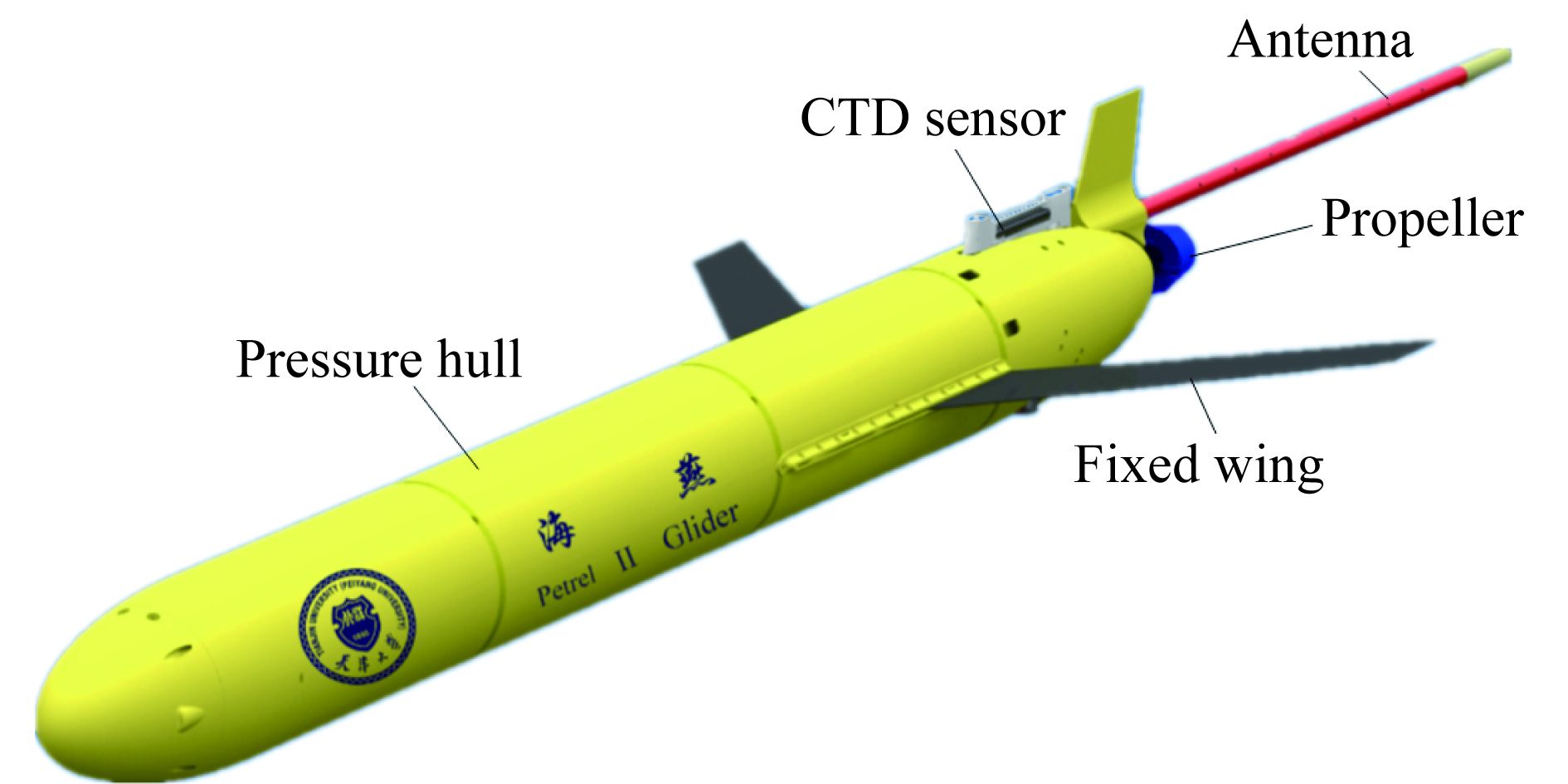
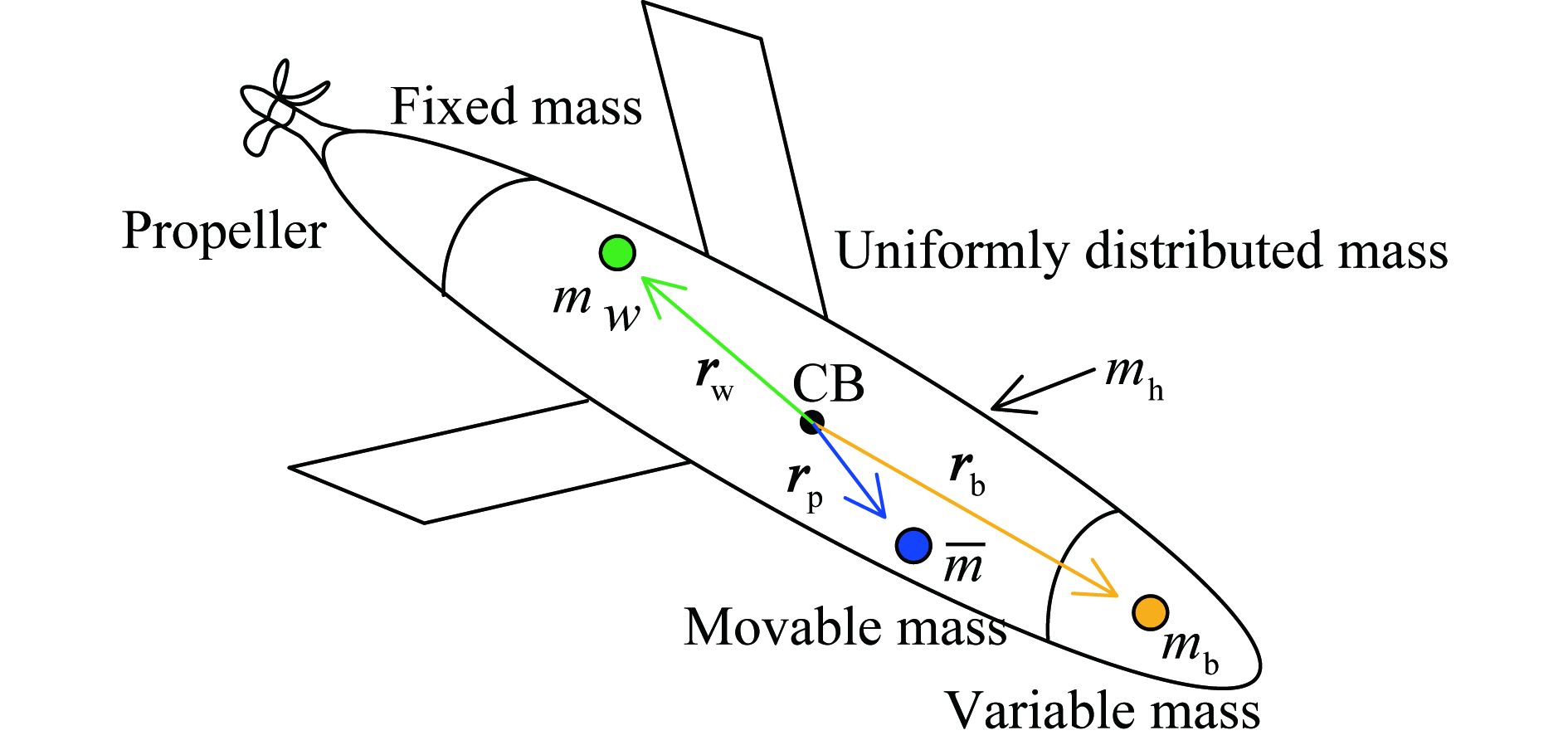
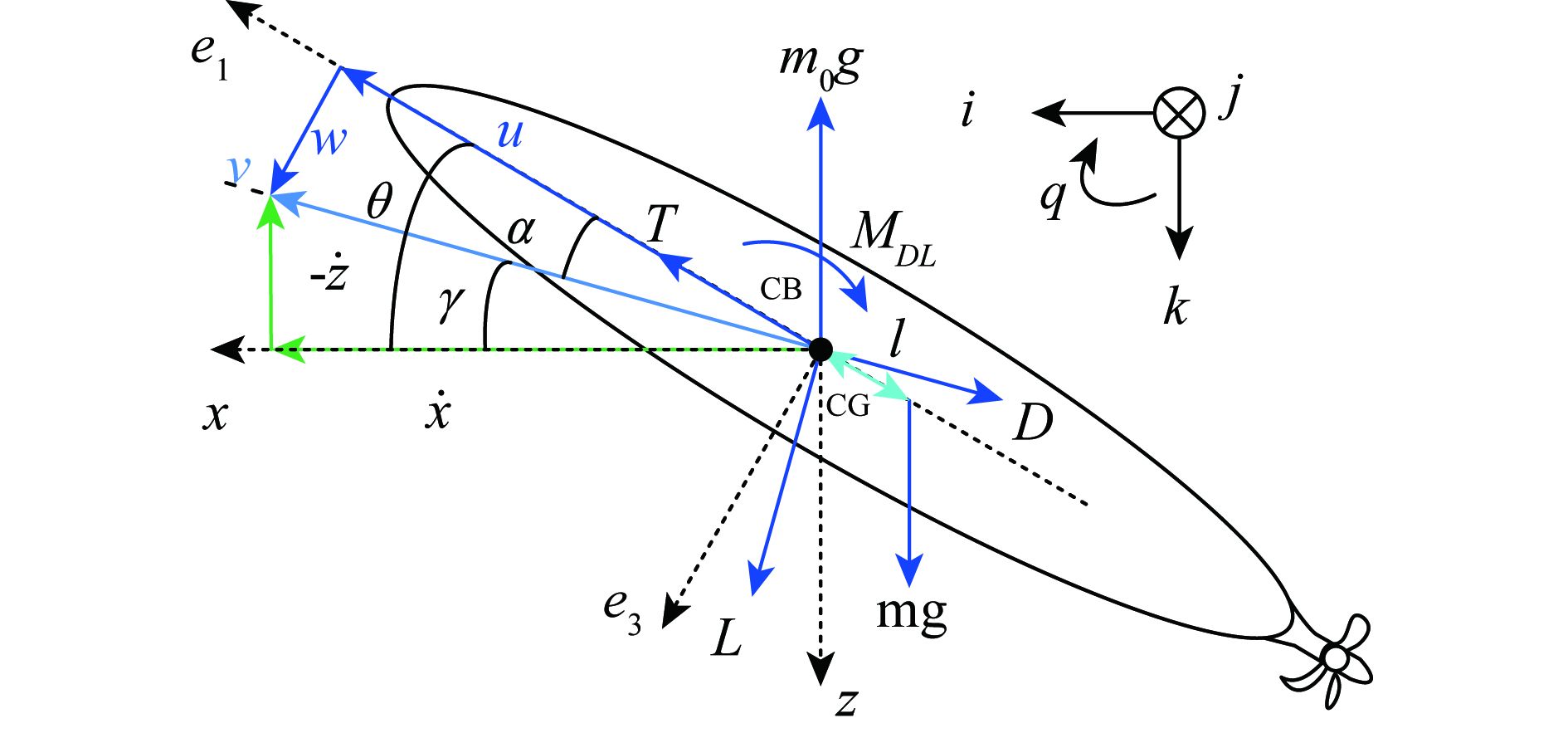
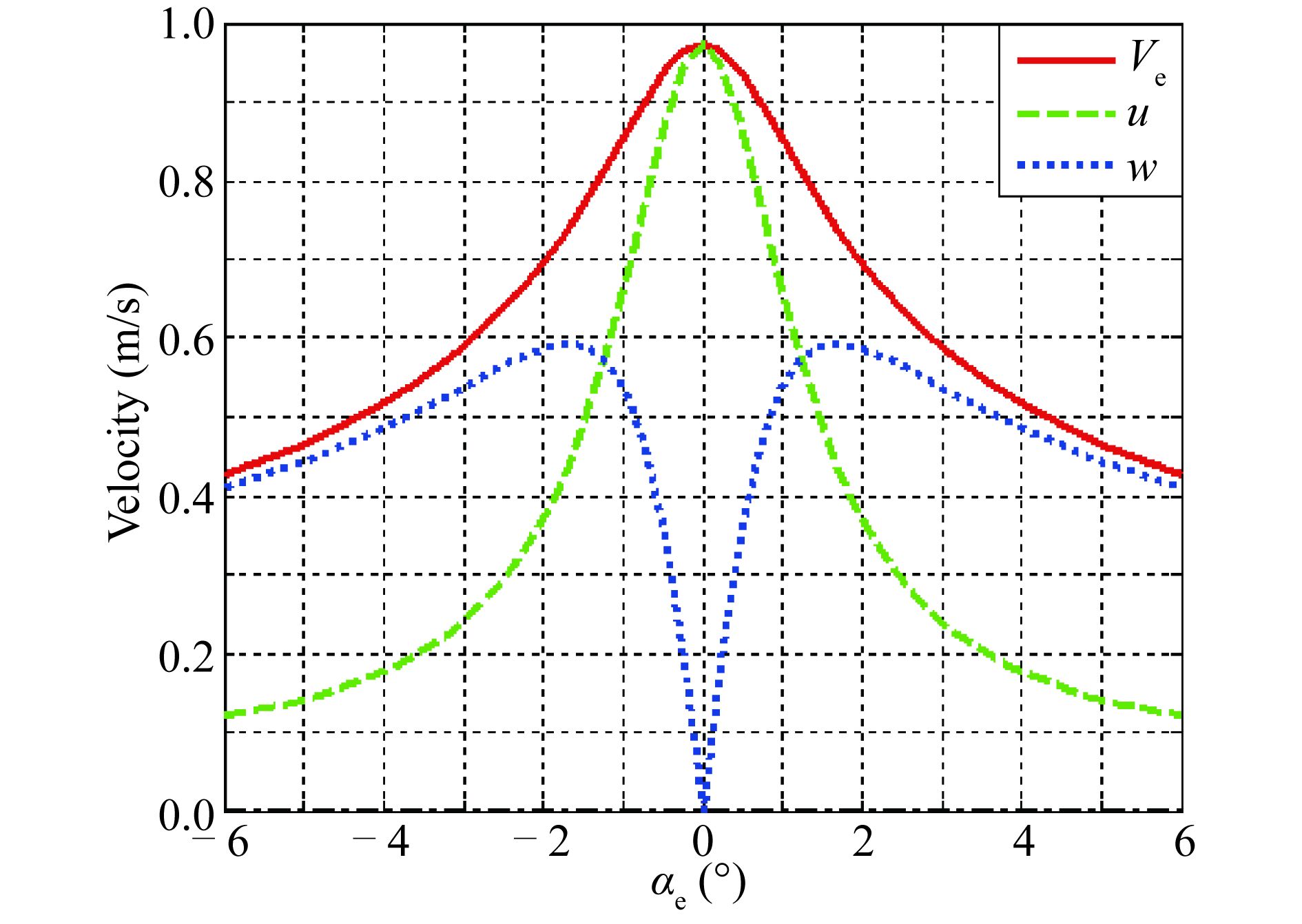
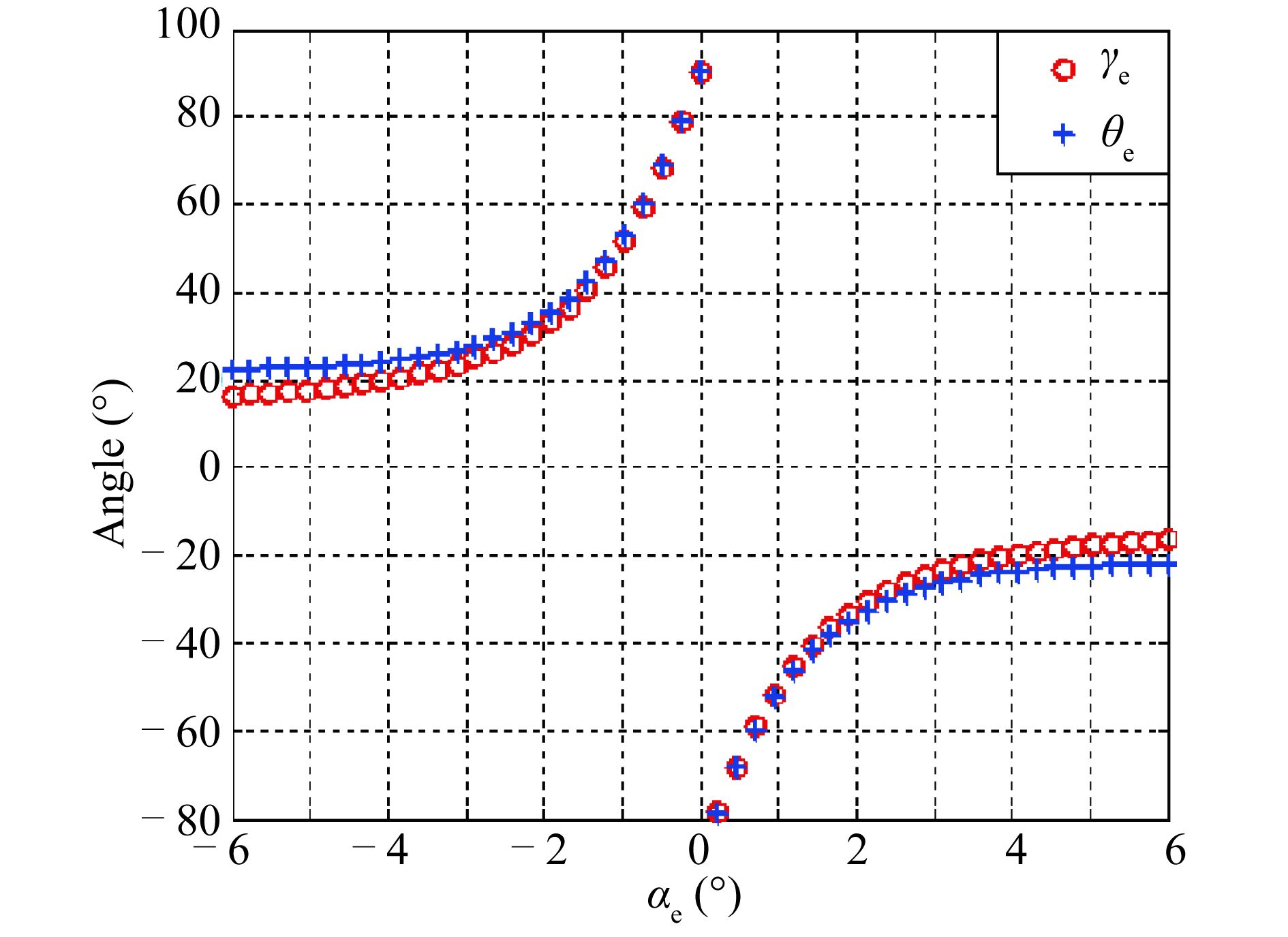
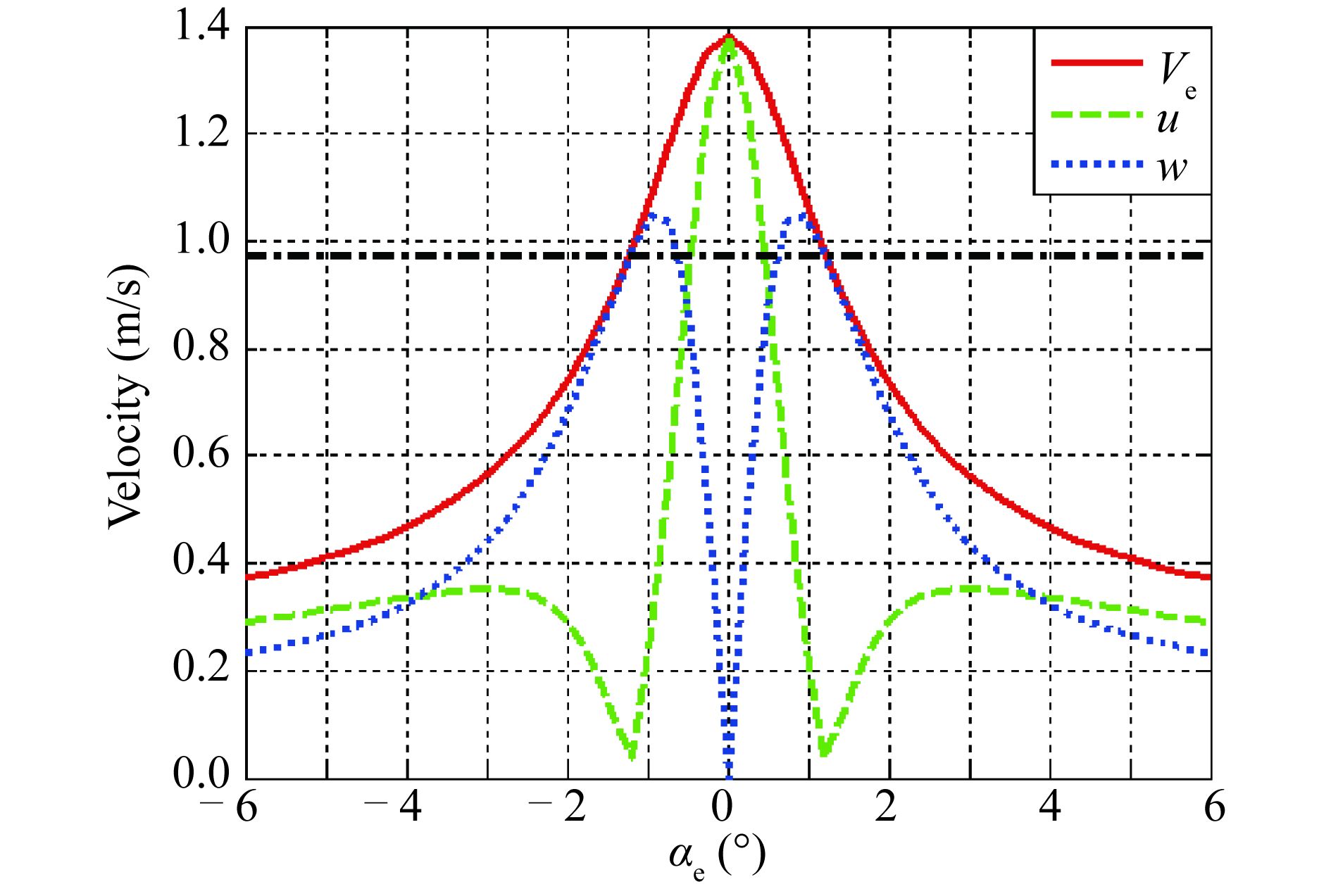
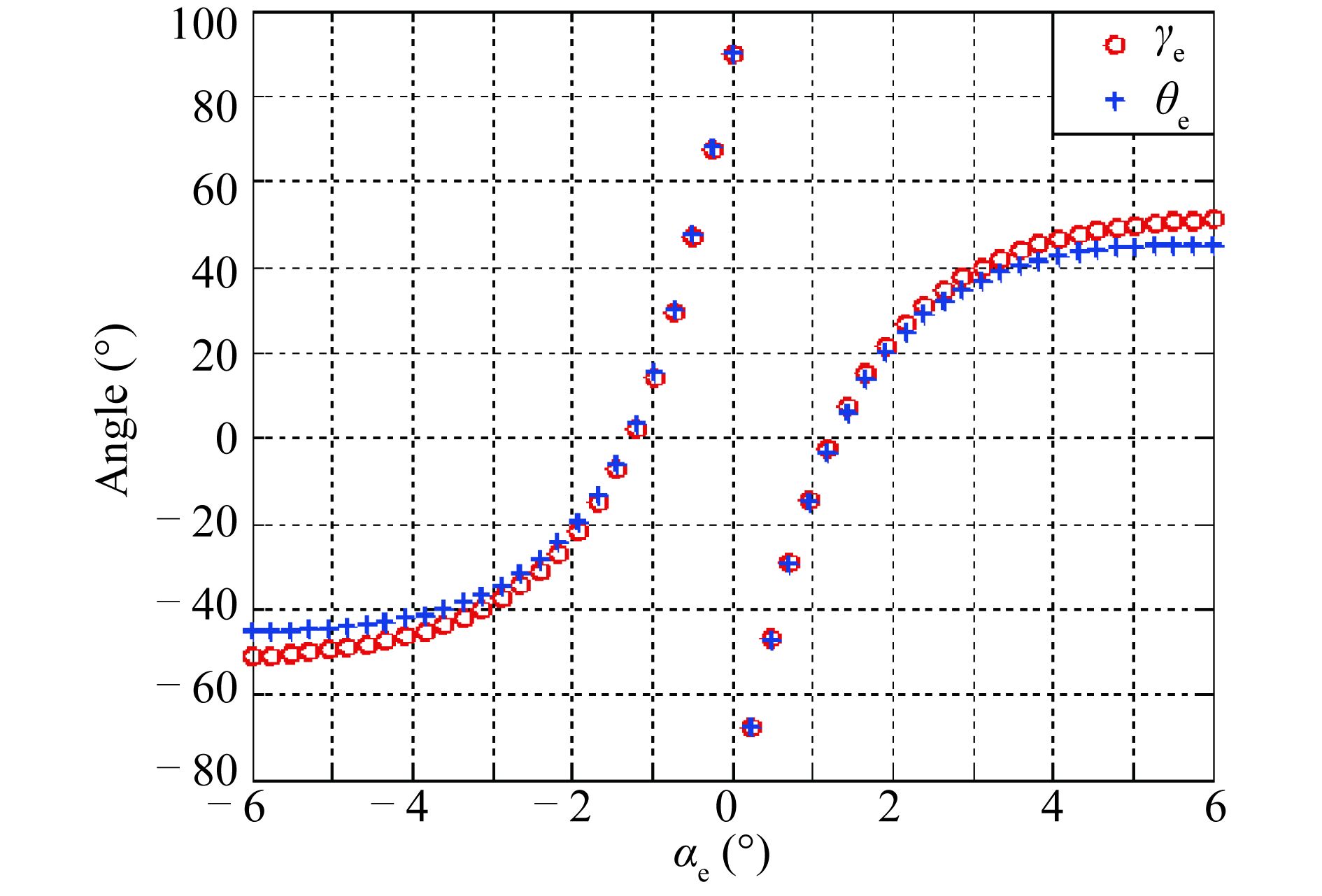
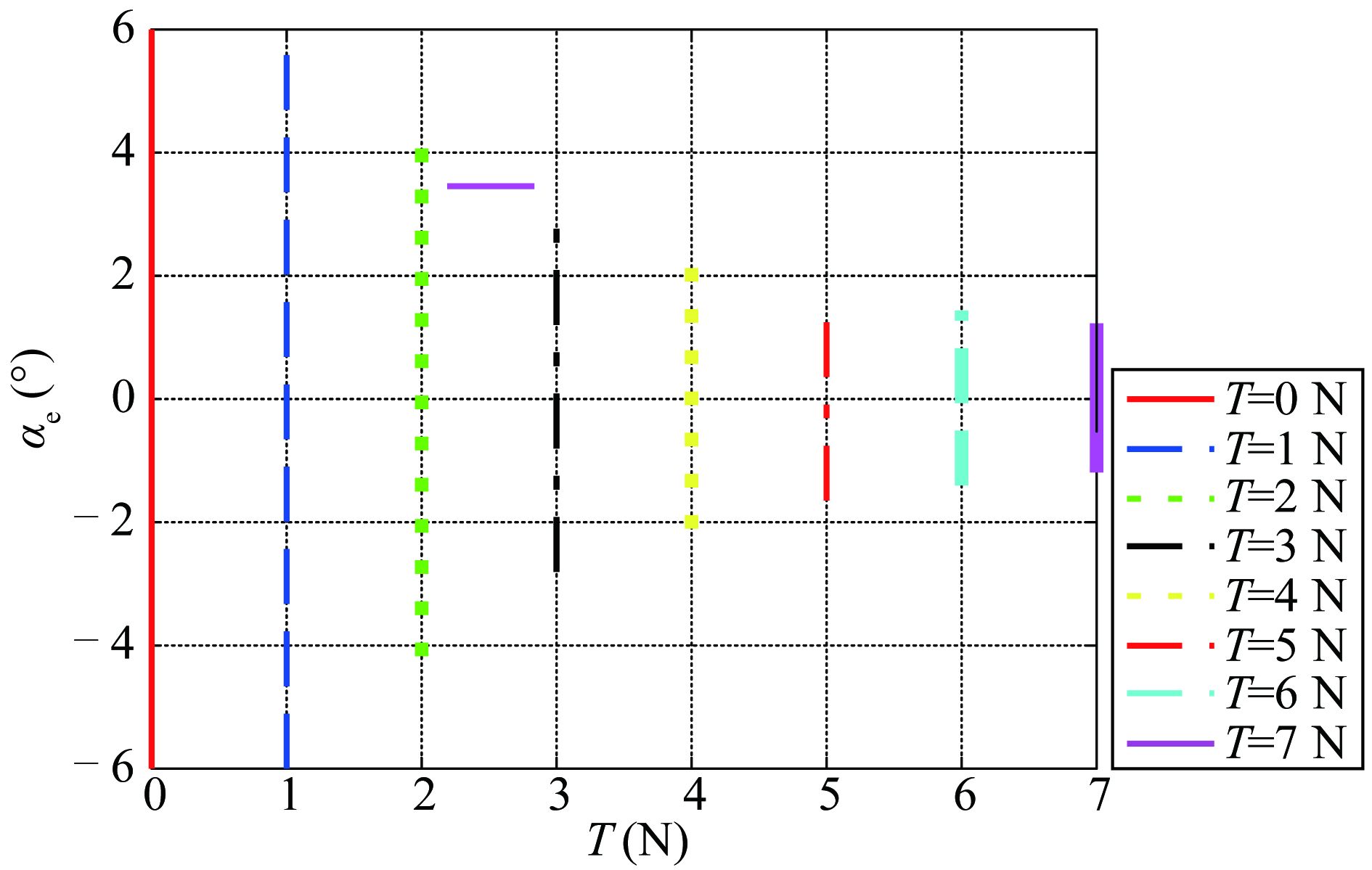
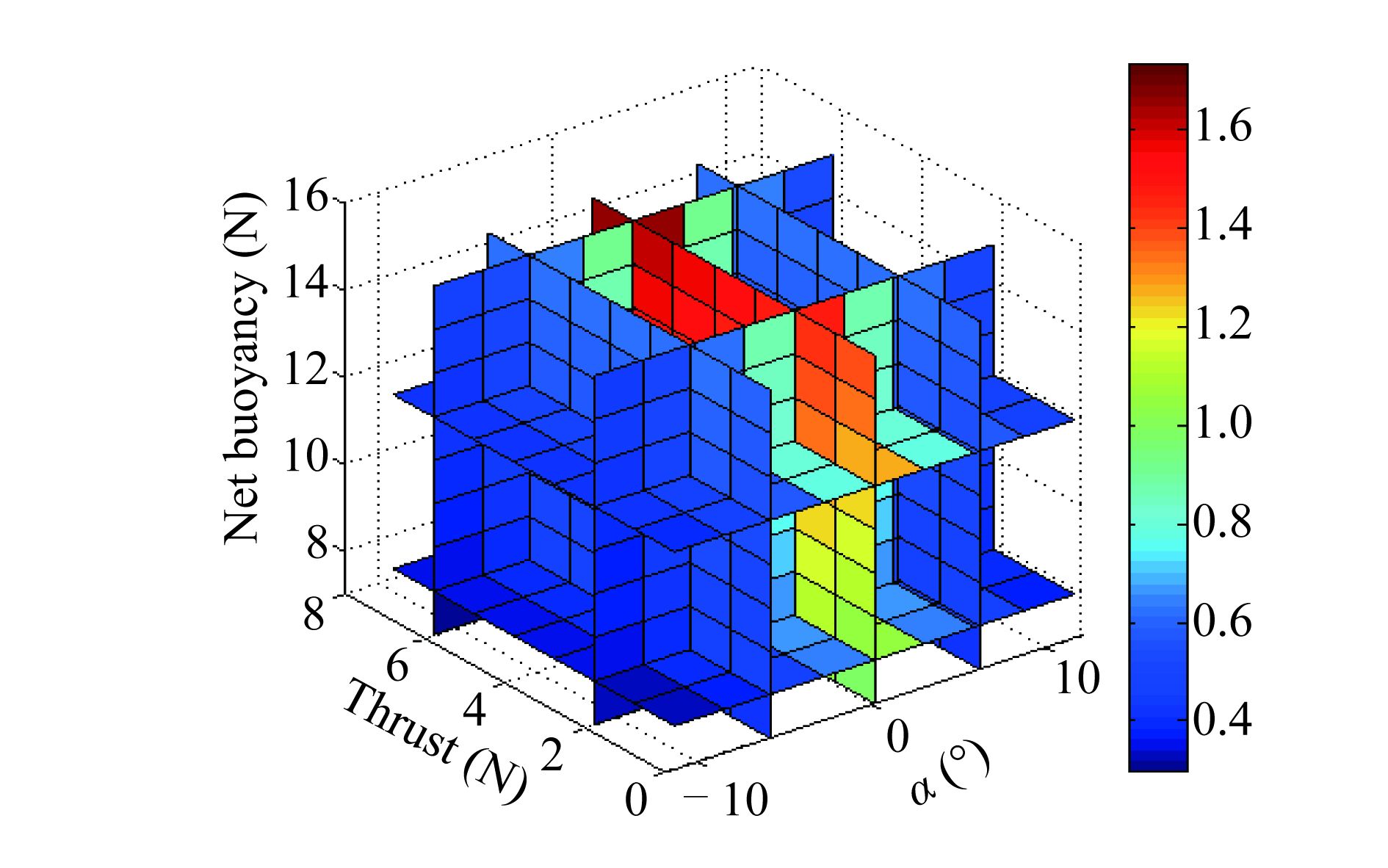
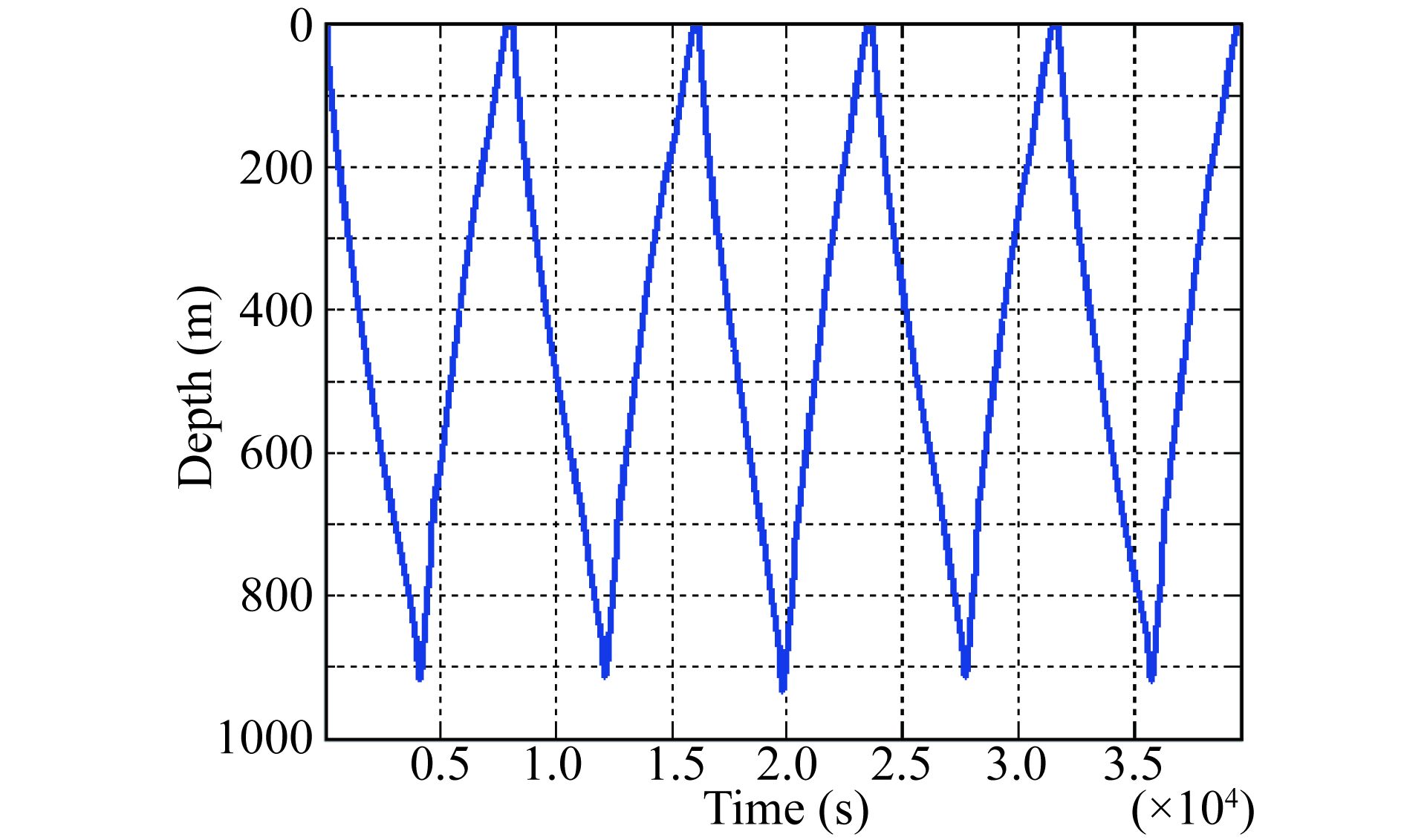
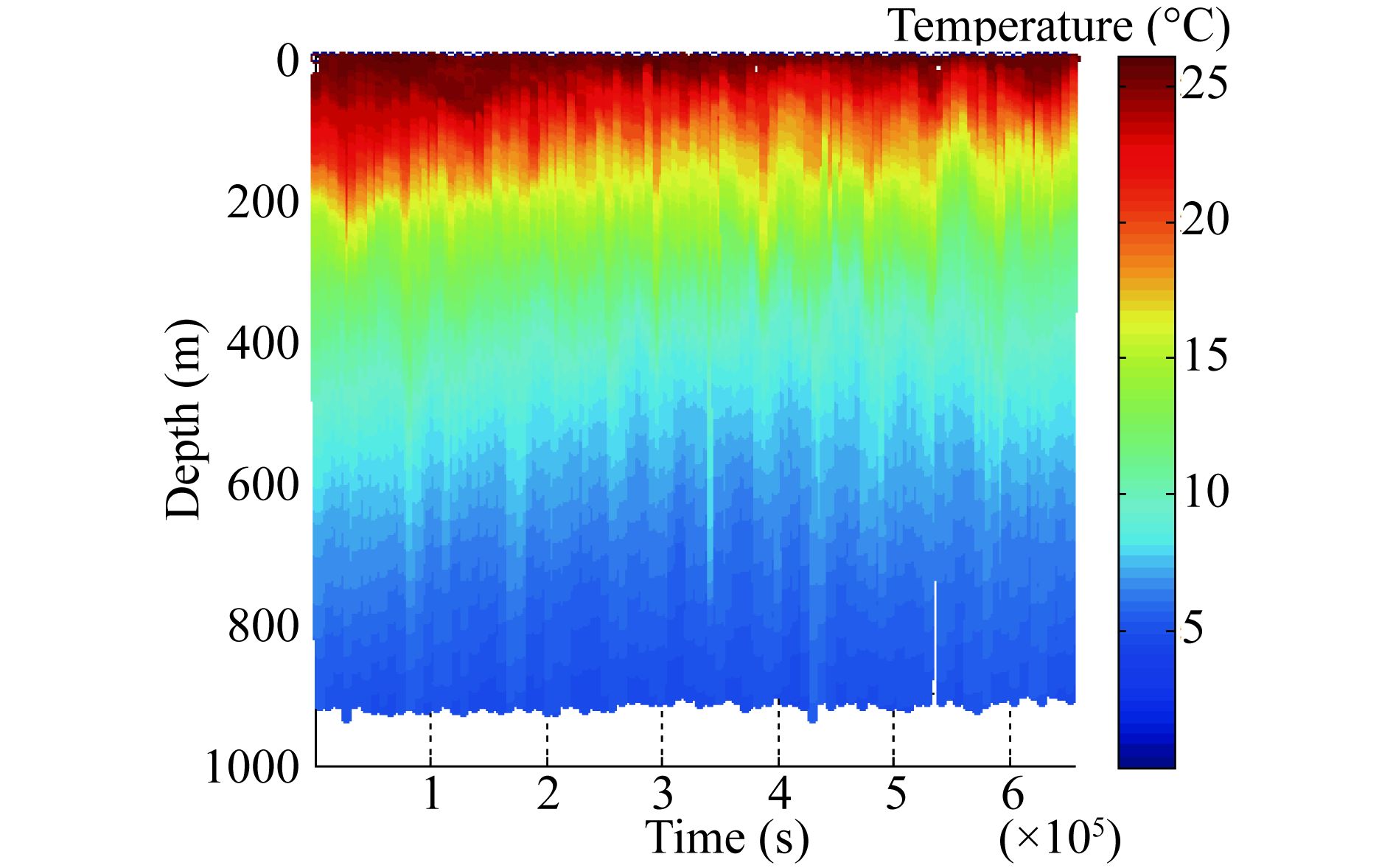
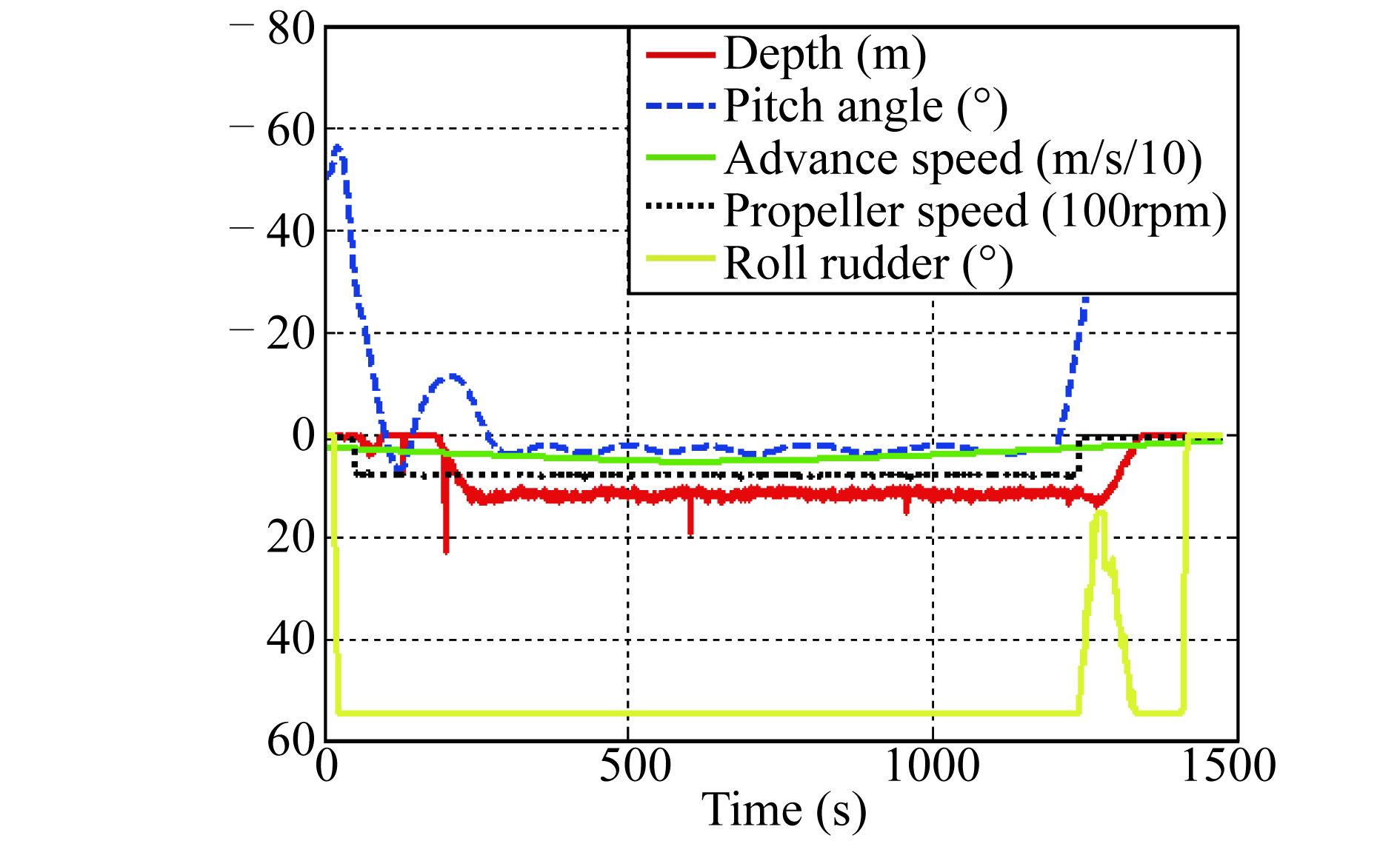
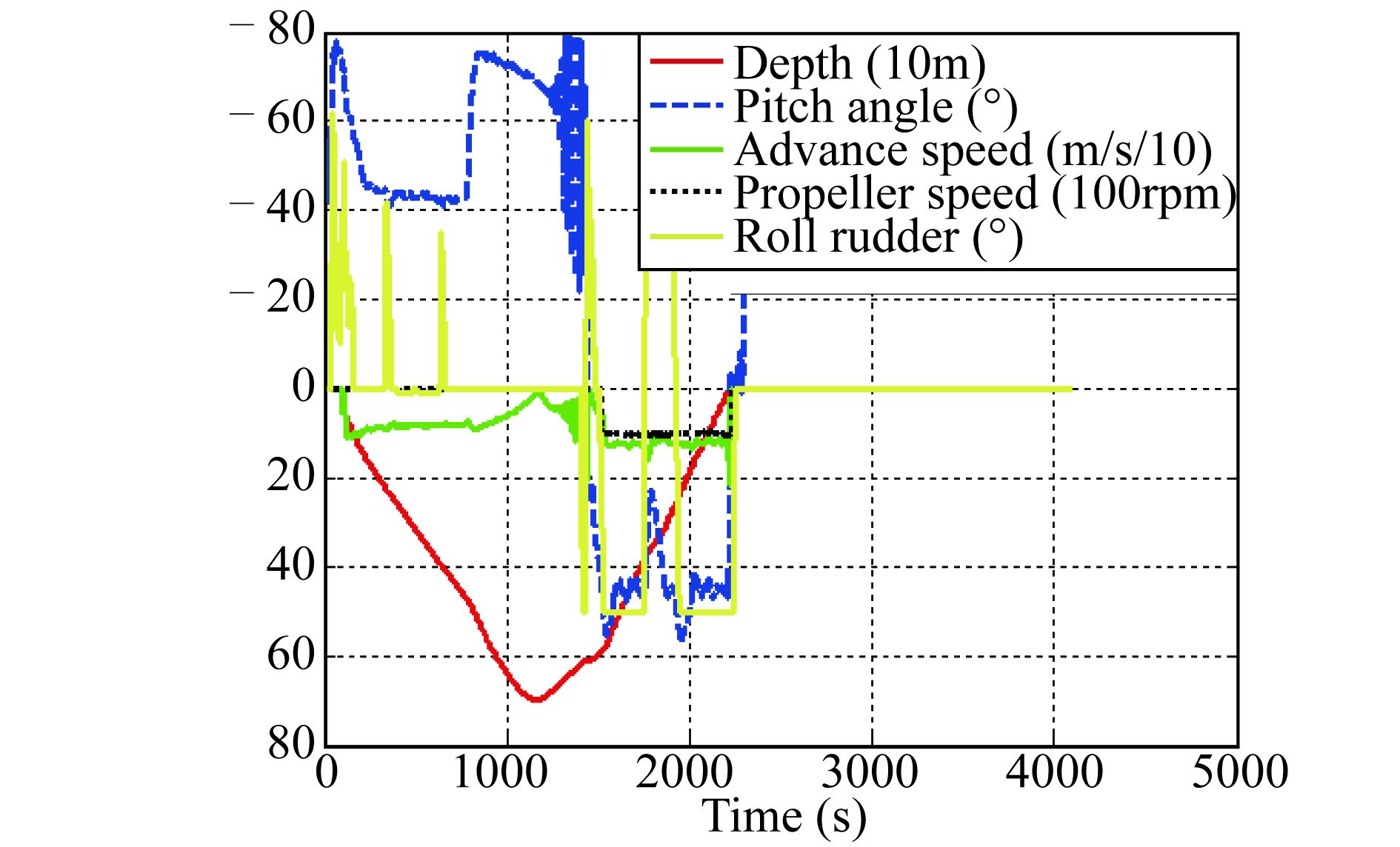
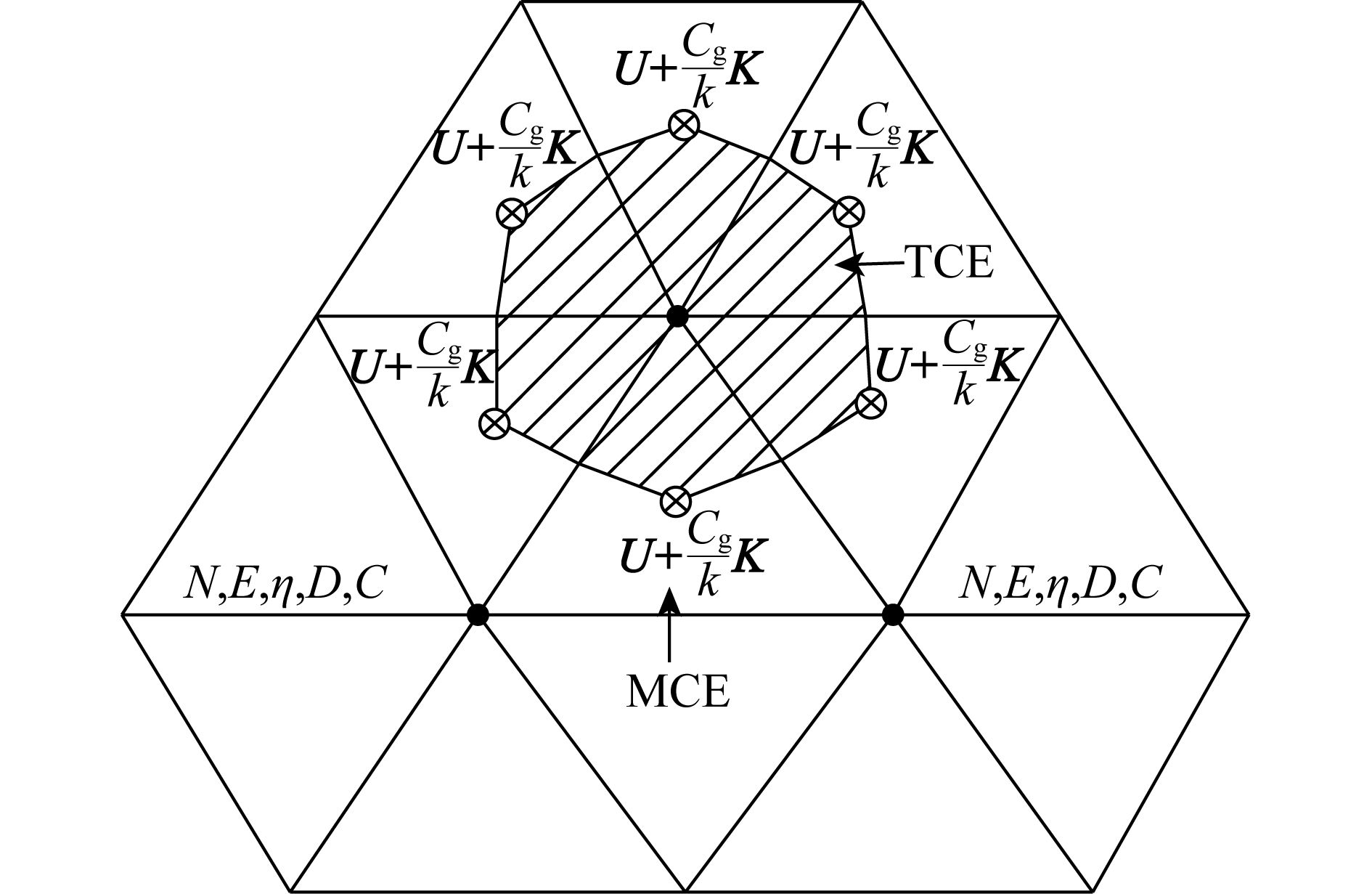
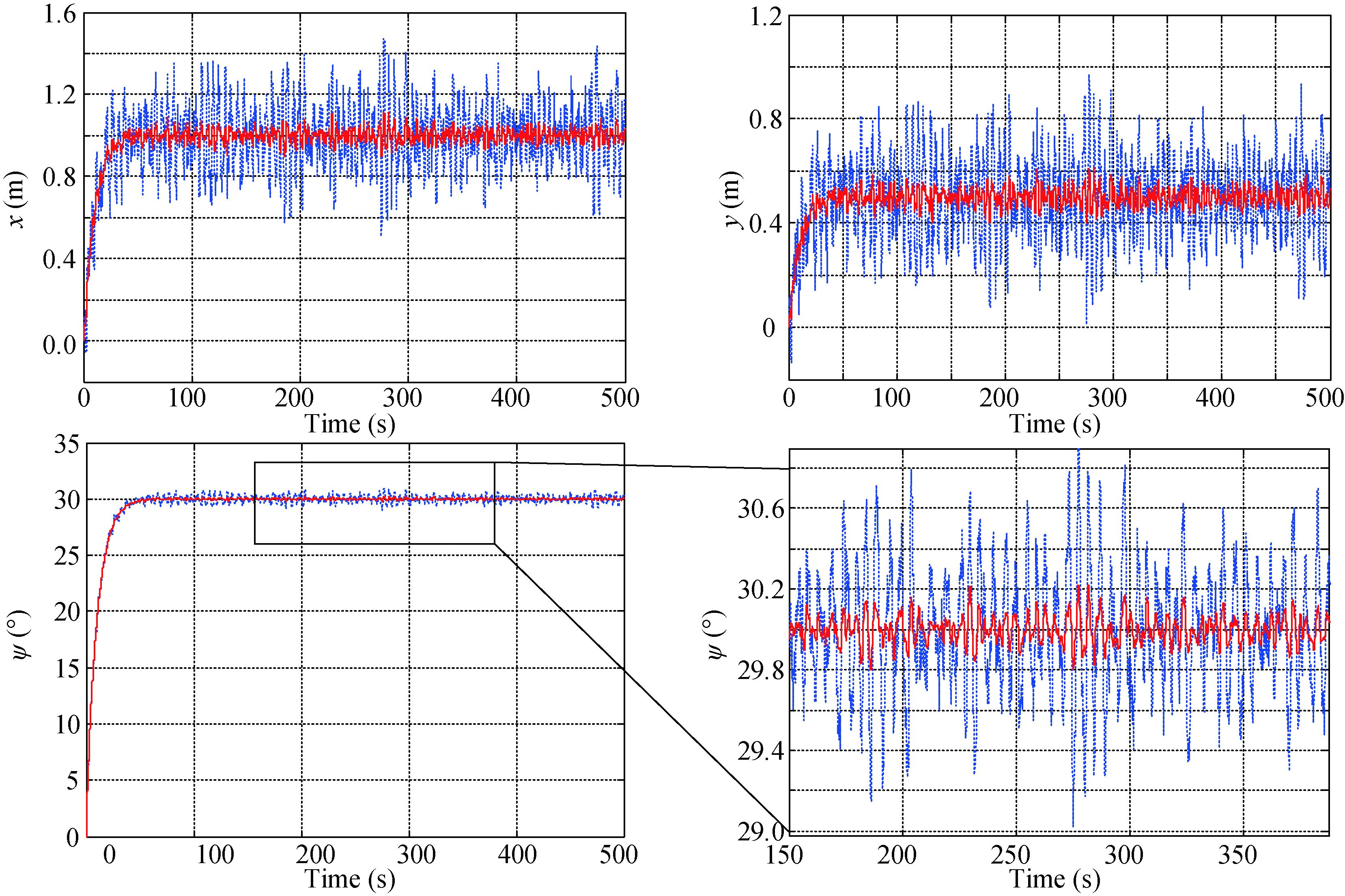
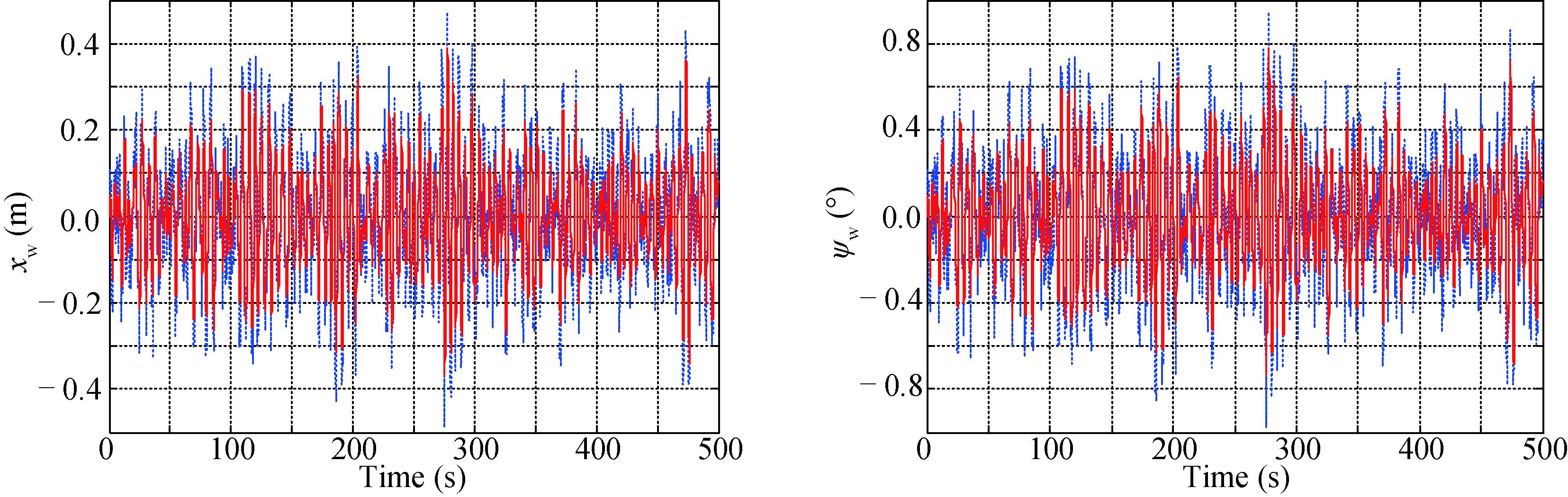
Hybrid-driven underwater glider is a new type of unmanned underwater vehicle, which combines the advantages of autonomous underwater vehicles and traditional underwater gliders. The autonomous underwater vehicles have good maneuverability and can travel with a high speed, while the traditional underwater gliders are highlighted by low power consumption, long voyage, long endurance and good stealth characteristics. The hybrid-driven underwater gliders can realize variable motion profiles by their own buoyancy-driven and propeller propulsion systems. Stability of the mechanical system determines the performance of the system. In this paper, the Petrel-II hybrid-driven underwater glider developed by Tianjin University is selected as the research object and the stability of hybrid-driven underwater glider unitedly controlled by buoyancy and propeller has been targeted and evidenced. The dimensionless equations of the hybrid-driven underwater glider are obtained when the propeller is working. Then, the steady speed and steady glide path angle under steady-state motion have also been achieved. The steady-state operating conditions can be calculated when the hybrid-driven underwater glider reaches the desired steady-state motion. And the steady-state operating conditions are relatively conservative at the lower bound of the velocity range compared with the range of the velocity derived from the method of the composite Lyapunov function. By calculating the hydrodynamic coefficients of the Petrel-II hybrid-driven underwater glider, the simulation analysis has been conducted. In addition, the results of the field trials conducted in the South China Sea and the Danjiangkou Reservoir of China have been presented to illustrate the validity of the analysis and simulation, and to show the feasibility of the method of the composite Lyapunov function which verifies the stability of the Petrel-II hybrid-driven underwater glider.
Hybrid-driven underwater glider is a new type of unmanned underwater vehicle, which combines the advantages of autonomous underwater vehicles and traditional underwater gliders. The autonomous underwater vehicles have good maneuverability and can travel with a high speed, while the traditional underwater gliders are highlighted by low power consumption, long voyage, long endurance and good stealth characteristics. The hybrid-driven underwater gliders can realize variable motion profiles by their own buoyancy-driven and propeller propulsion systems. Stability of the mechanical system determines the performance of the system. In this paper, the Petrel-II hybrid-driven underwater glider developed by Tianjin University is selected as the research object and the stability of hybrid-driven underwater glider unitedly controlled by buoyancy and propeller has been targeted and evidenced. The dimensionless equations of the hybrid-driven underwater glider are obtained when the propeller is working. Then, the steady speed and steady glide path angle under steady-state motion have also been achieved. The steady-state operating conditions can be calculated when the hybrid-driven underwater glider reaches the desired steady-state motion. And the steady-state operating conditions are relatively conservative at the lower bound of the velocity range compared with the range of the velocity derived from the method of the composite Lyapunov function. By calculating the hydrodynamic coefficients of the Petrel-II hybrid-driven underwater glider, the simulation analysis has been conducted. In addition, the results of the field trials conducted in the South China Sea and the Danjiangkou Reservoir of China have been presented to illustrate the validity of the analysis and simulation, and to show the feasibility of the method of the composite Lyapunov function which verifies the stability of the Petrel-II hybrid-driven underwater glider.

2017, 31(5): 539-548.
doi: 10.1007/s13344-017-0062-x
Abstract:
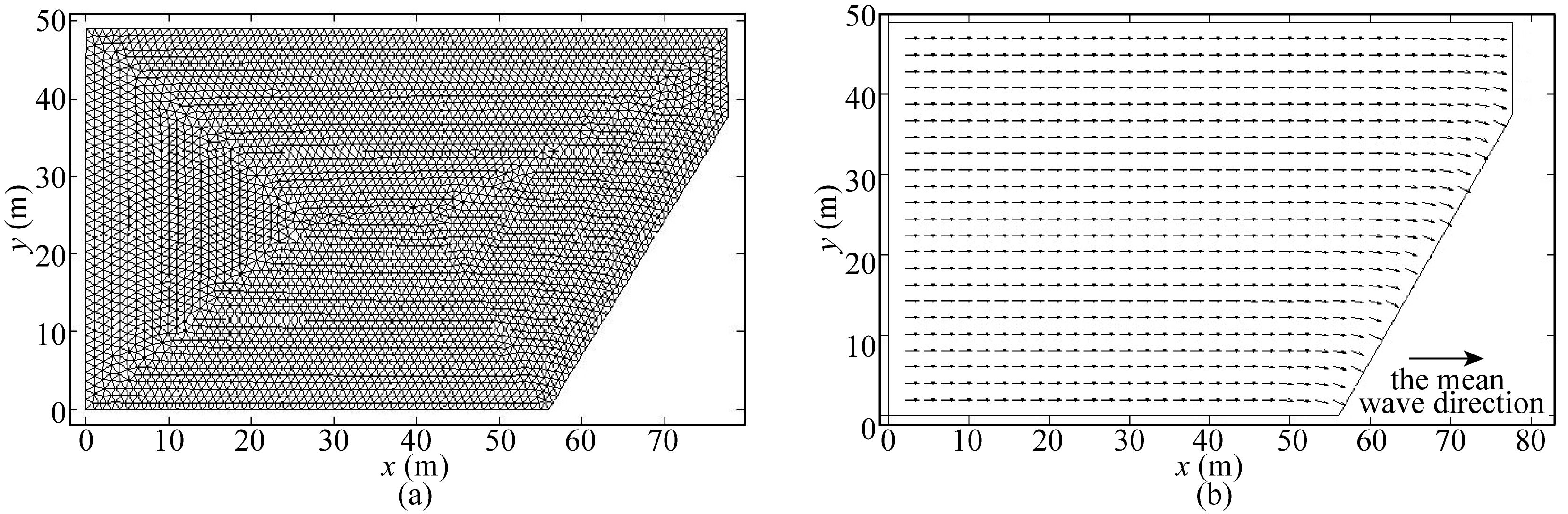
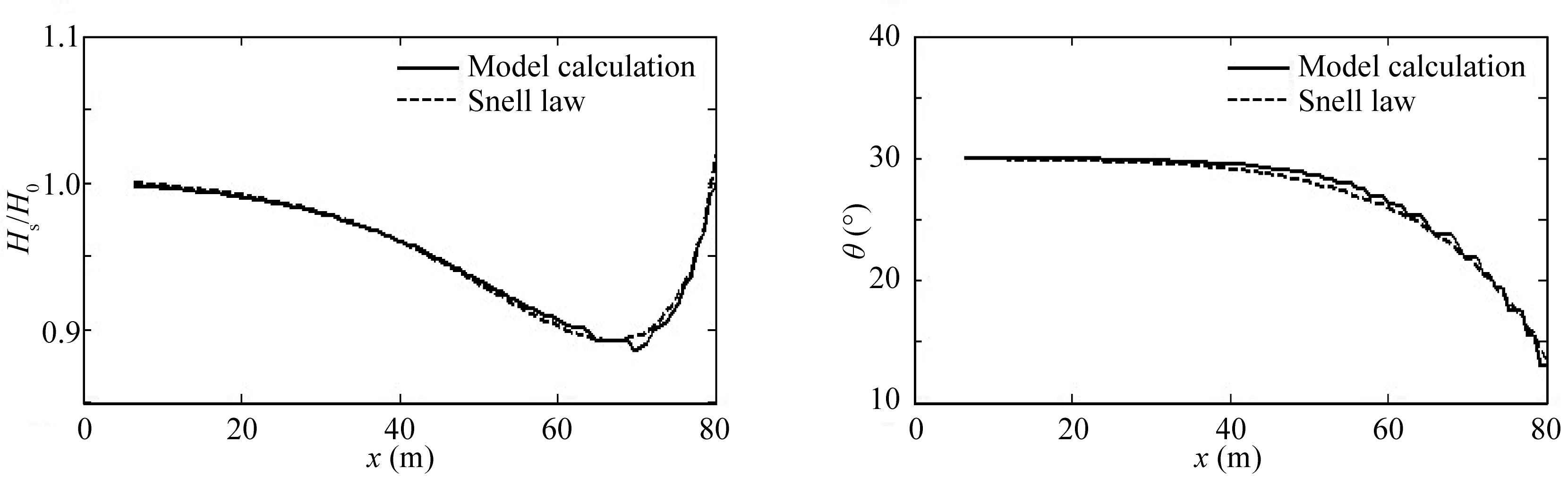
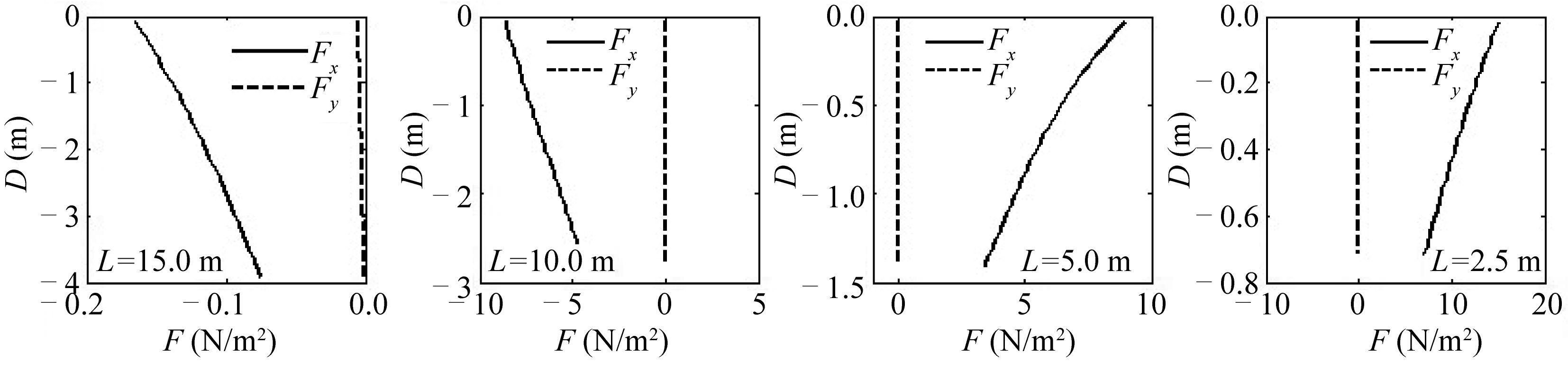
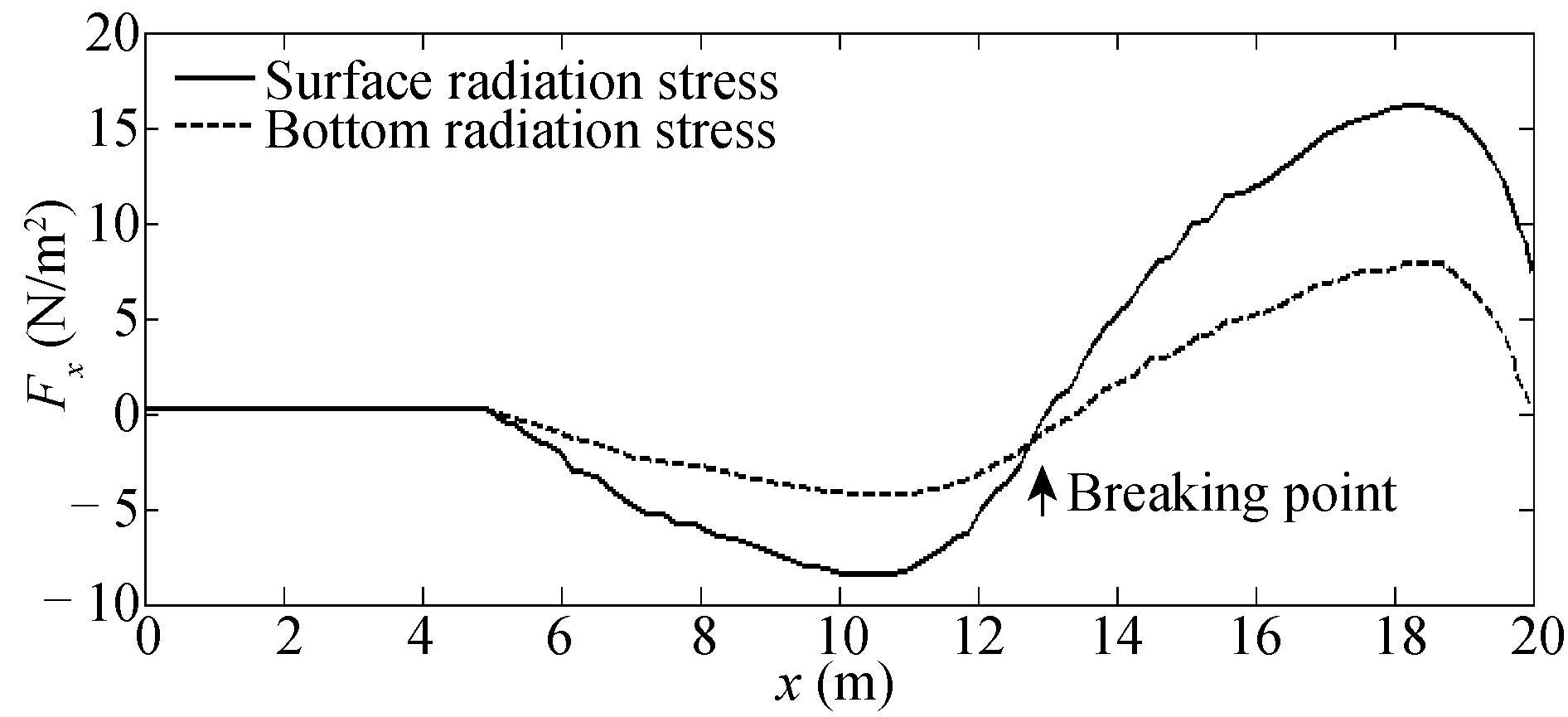
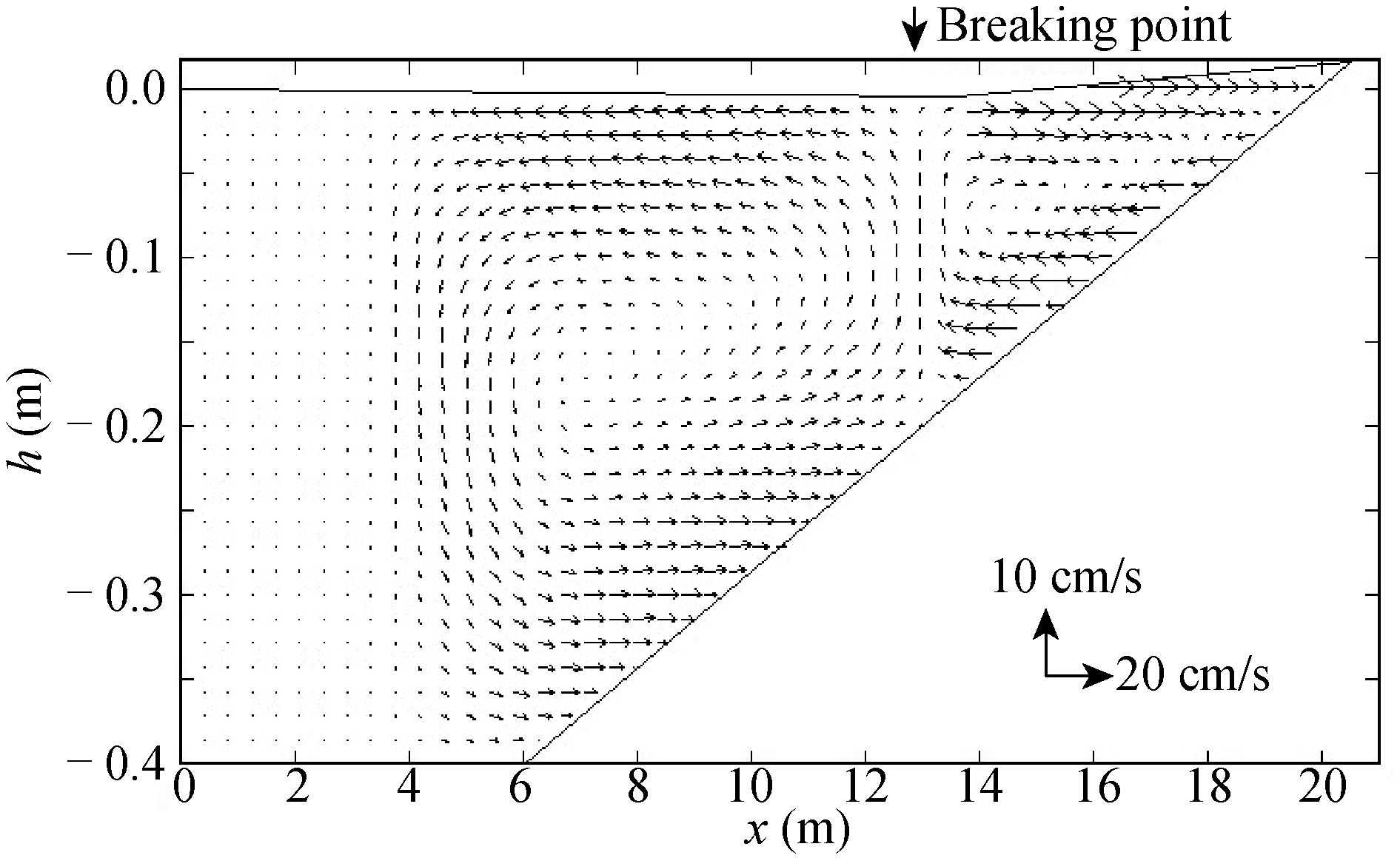
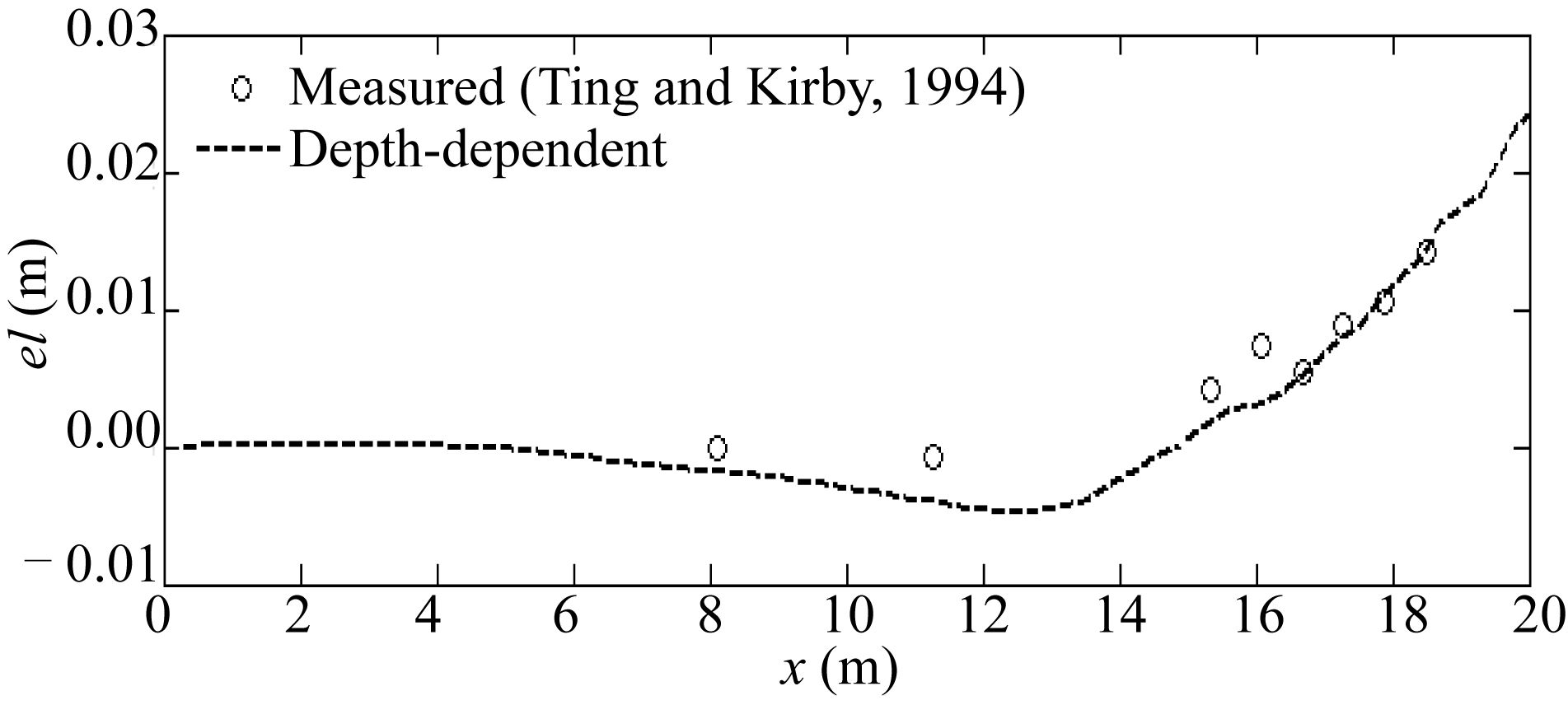
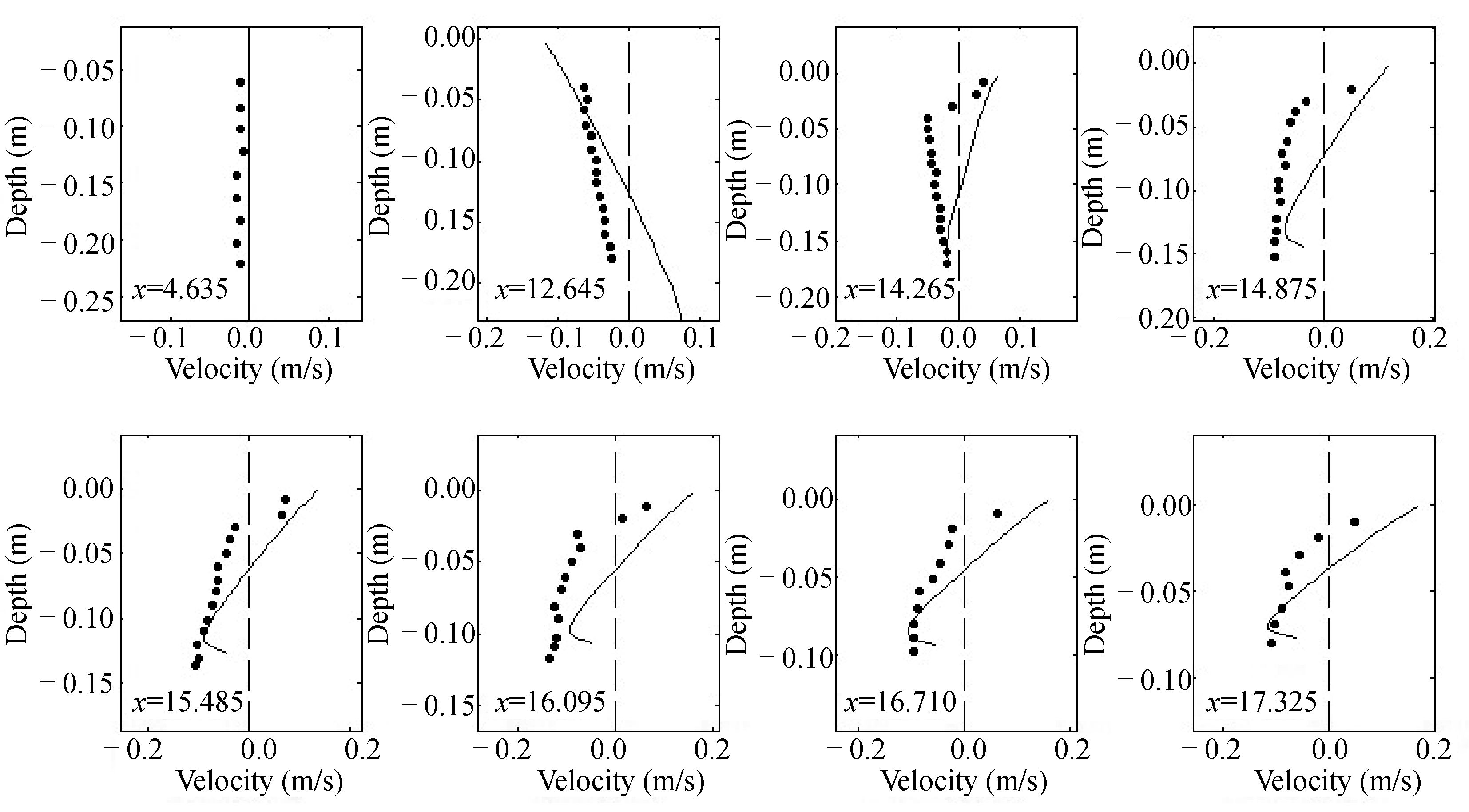
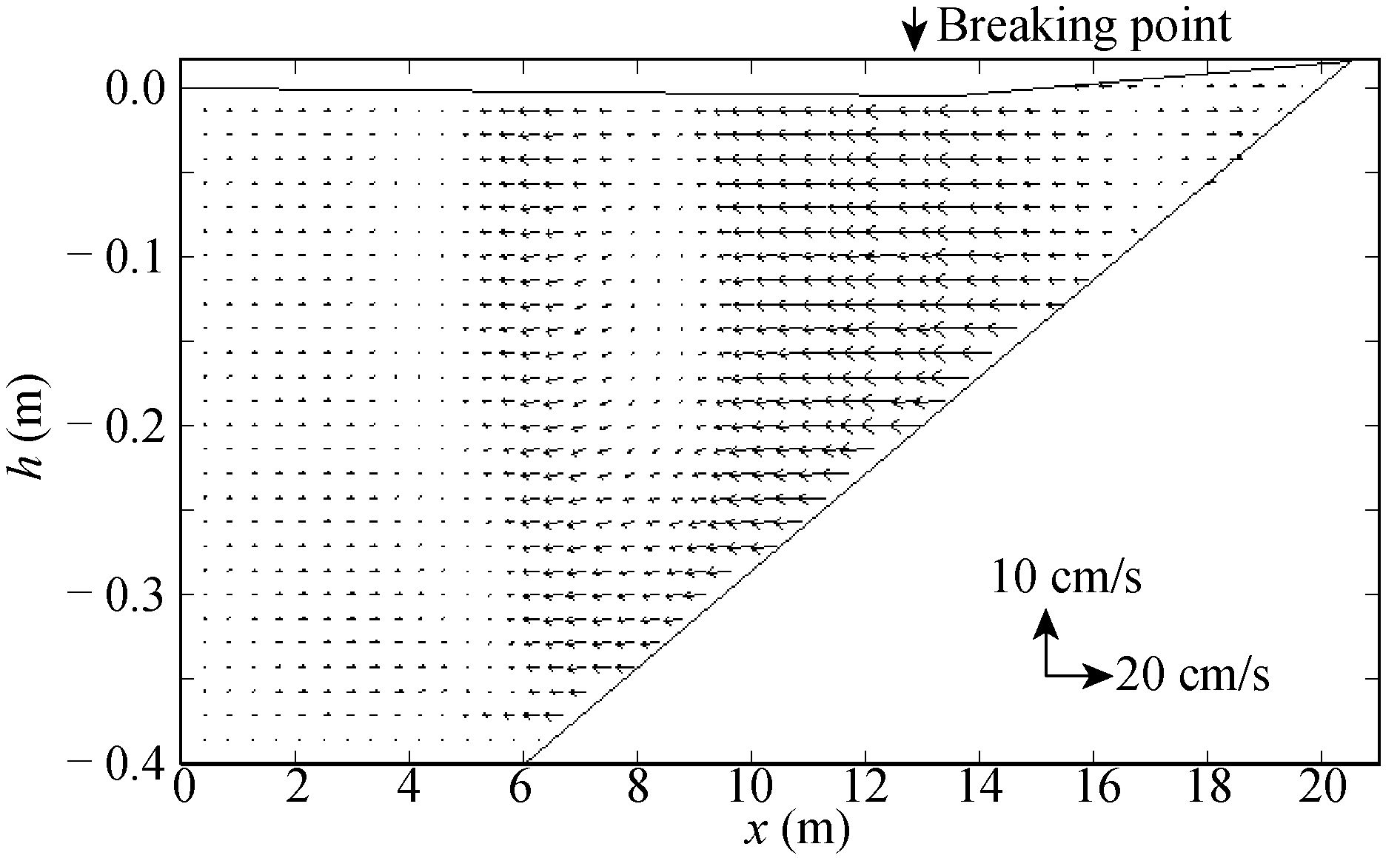
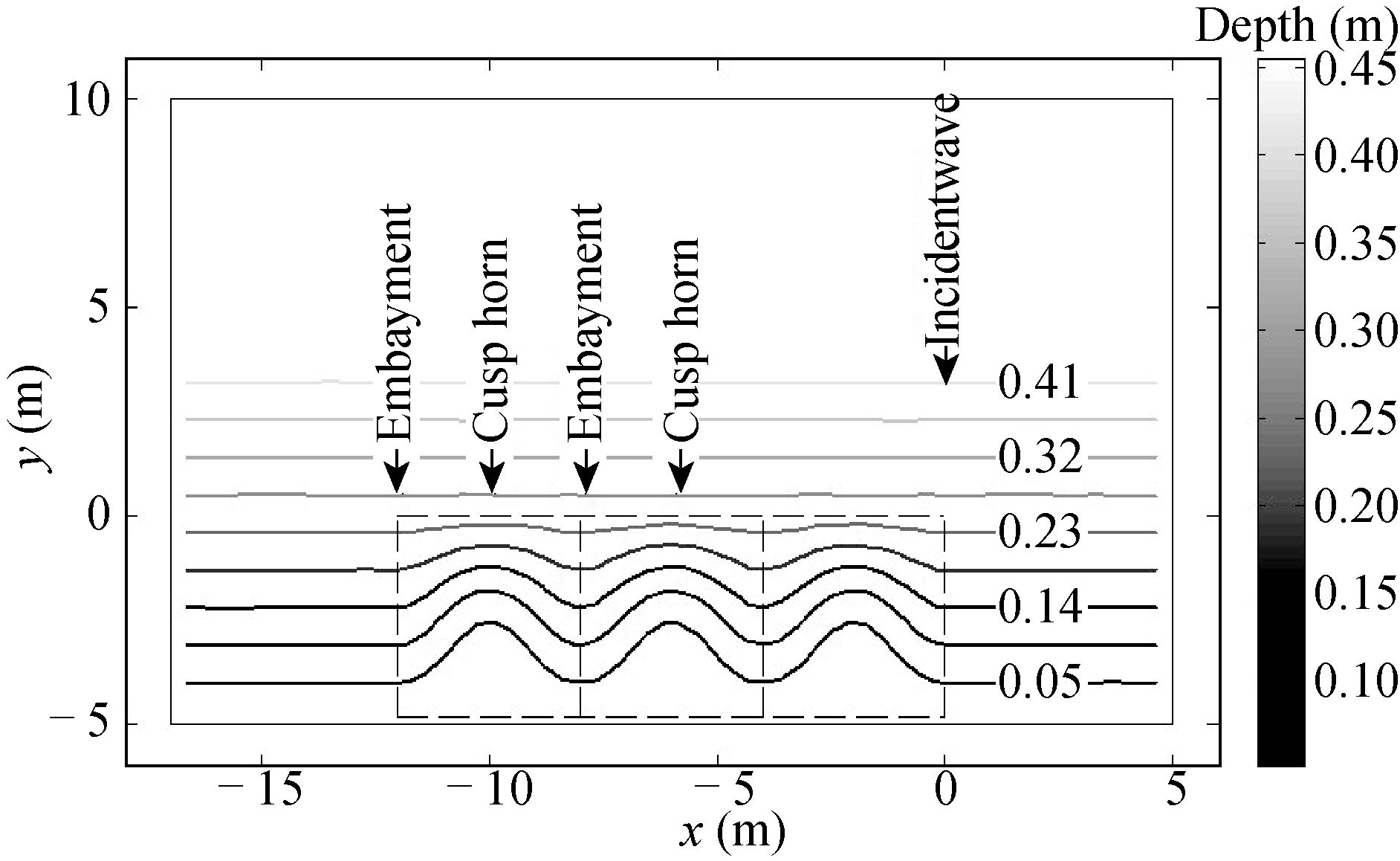
By coupling the three-dimensional hydrodynamic model with the wave model, numerical simulations of the three-dimensional wave-induced current are carried out in this study. The wave model is based on the numerical solution of the modified wave action equation and eikonal equation, which can describe the wave refraction and diffraction. The hydrodynamic model is driven by the wave-induced radiation stresses and affected by the wave turbulence. The numerical implementation of the module has used the finite-volume schemes on unstructured grid, which provides great flexibility for modeling the waves and currents in the complex actual nearshore, and ensures the conservation of energy propagation. The applicability of the proposed model is evaluated in calculating the cases of wave set-up, longshore currents, undertow on a sloping beach, rip currents and meandering longshore currents on a tri-cuspate beach. The results indicate that it is necessary to introduce the depth-dependent radiation stresses into the numerical simulation of wave-induced currents, and comparisons show that the present model makes better prediction on the wave procedure as well as both horizontal and vertical structures in the wave-induced current field.
By coupling the three-dimensional hydrodynamic model with the wave model, numerical simulations of the three-dimensional wave-induced current are carried out in this study. The wave model is based on the numerical solution of the modified wave action equation and eikonal equation, which can describe the wave refraction and diffraction. The hydrodynamic model is driven by the wave-induced radiation stresses and affected by the wave turbulence. The numerical implementation of the module has used the finite-volume schemes on unstructured grid, which provides great flexibility for modeling the waves and currents in the complex actual nearshore, and ensures the conservation of energy propagation. The applicability of the proposed model is evaluated in calculating the cases of wave set-up, longshore currents, undertow on a sloping beach, rip currents and meandering longshore currents on a tri-cuspate beach. The results indicate that it is necessary to introduce the depth-dependent radiation stresses into the numerical simulation of wave-induced currents, and comparisons show that the present model makes better prediction on the wave procedure as well as both horizontal and vertical structures in the wave-induced current field.


2017, 31(5): 549-558.
doi: 10.1007/s13344-017-0063-9
Abstract:
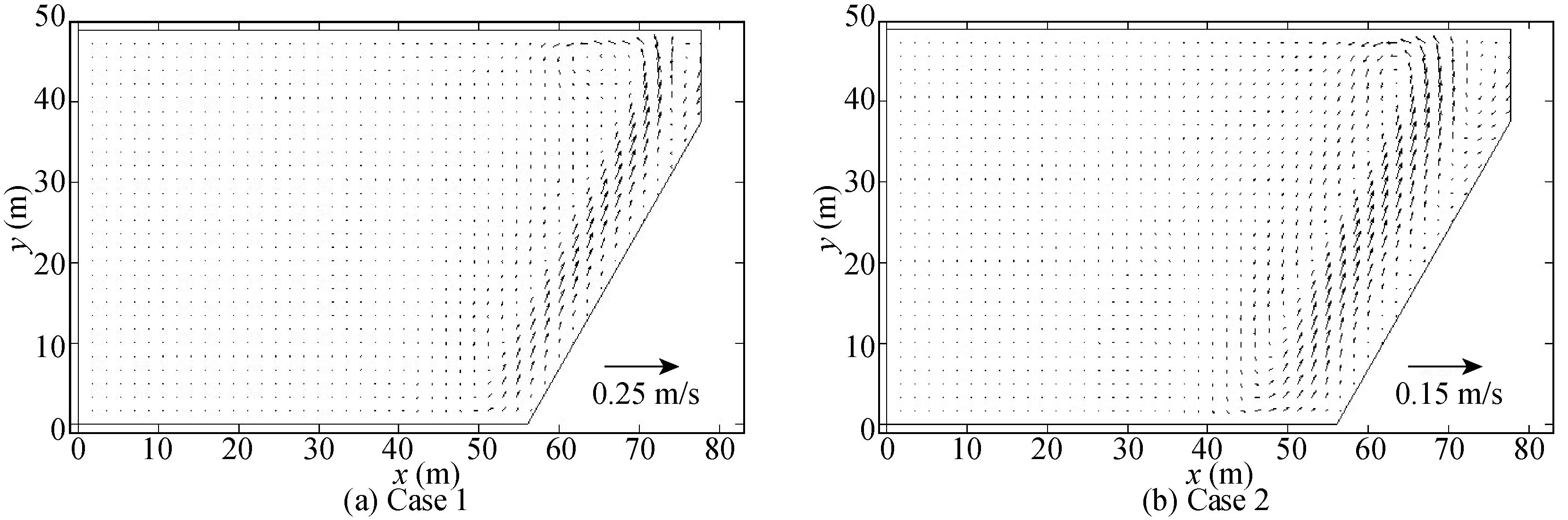
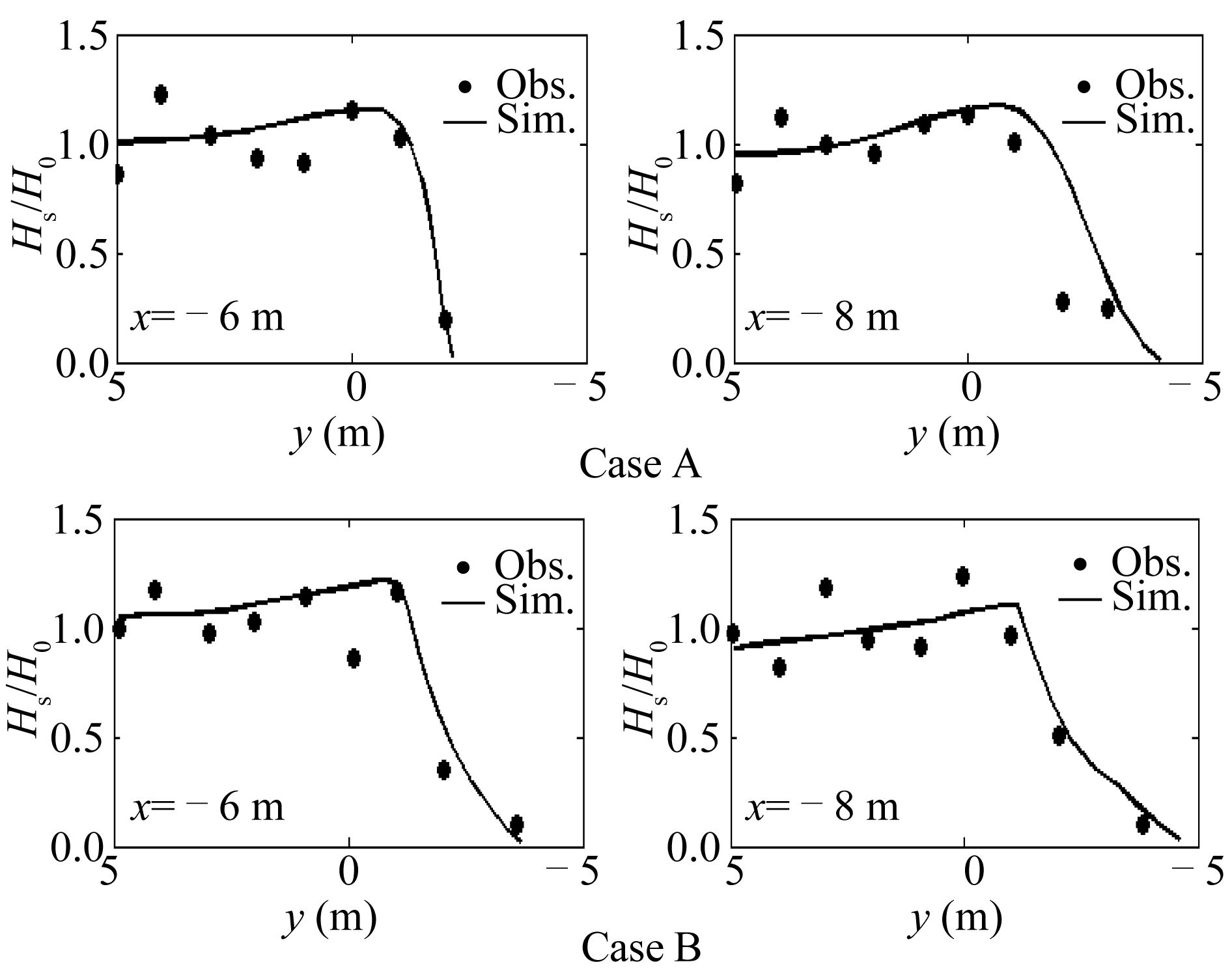
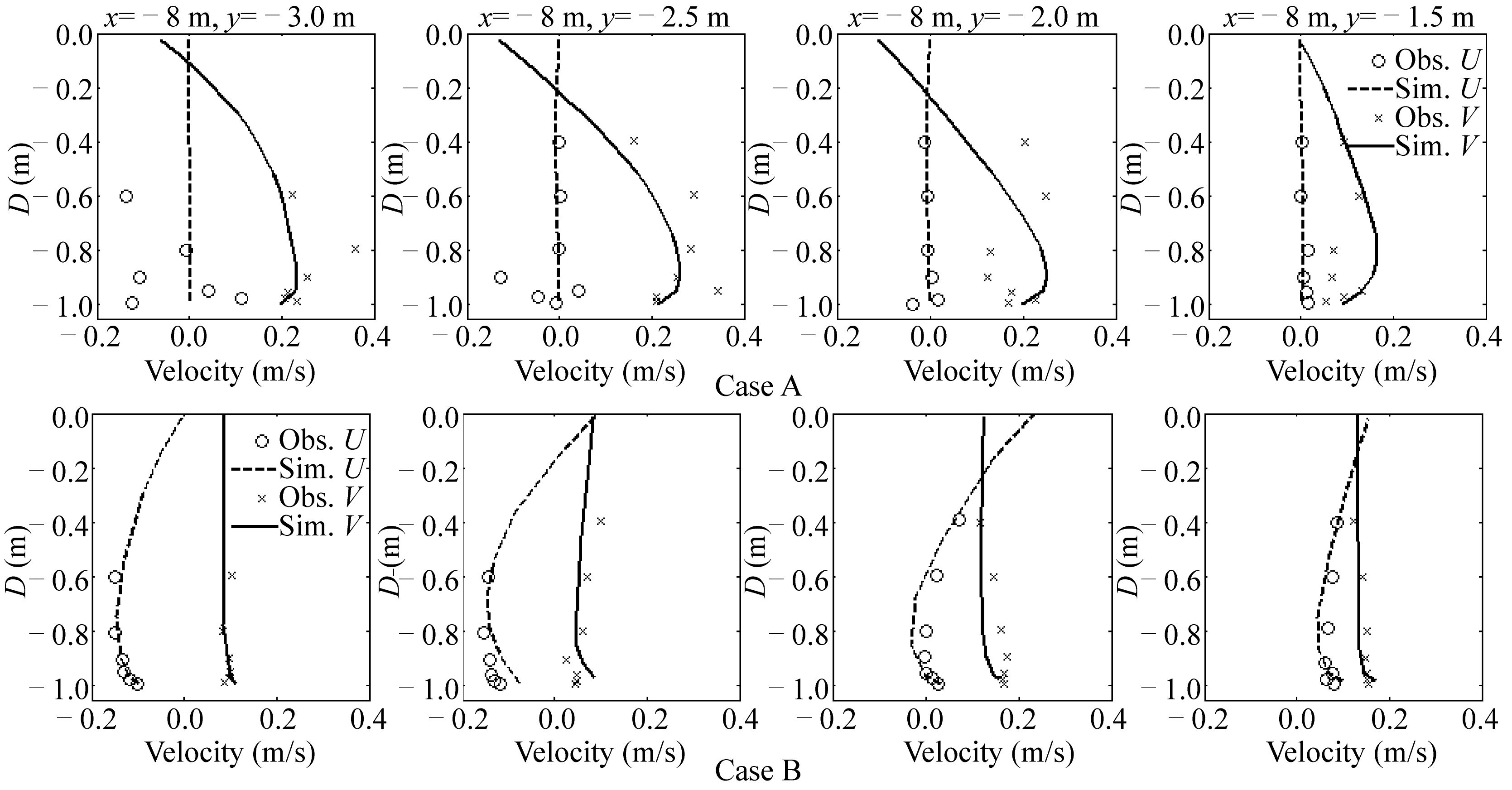
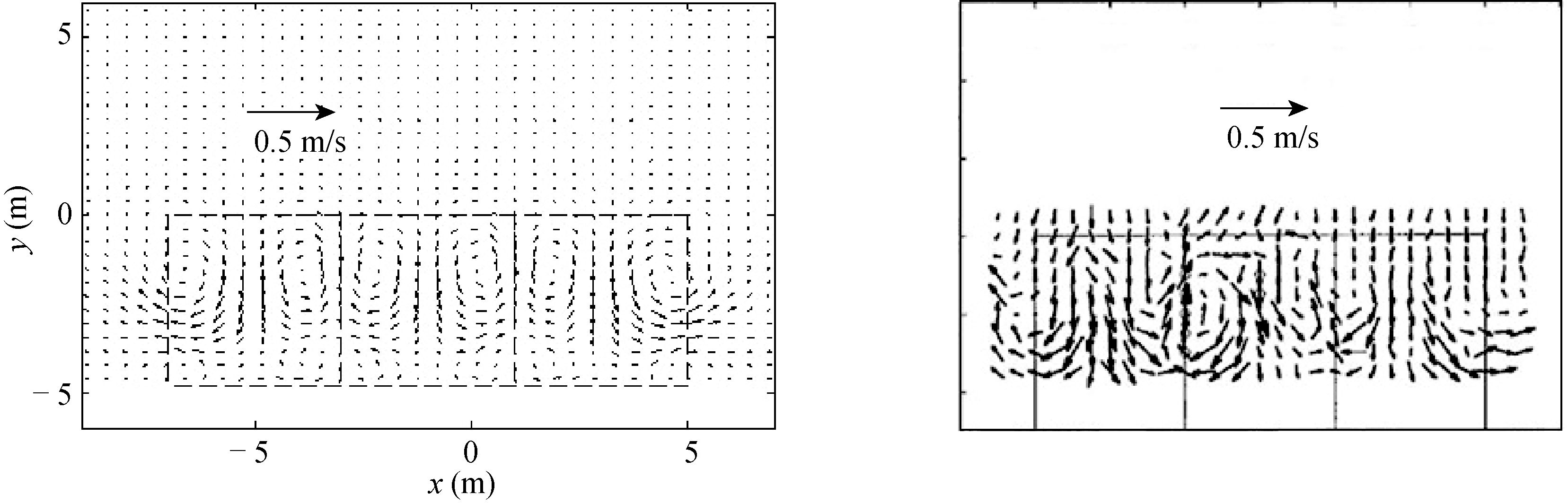
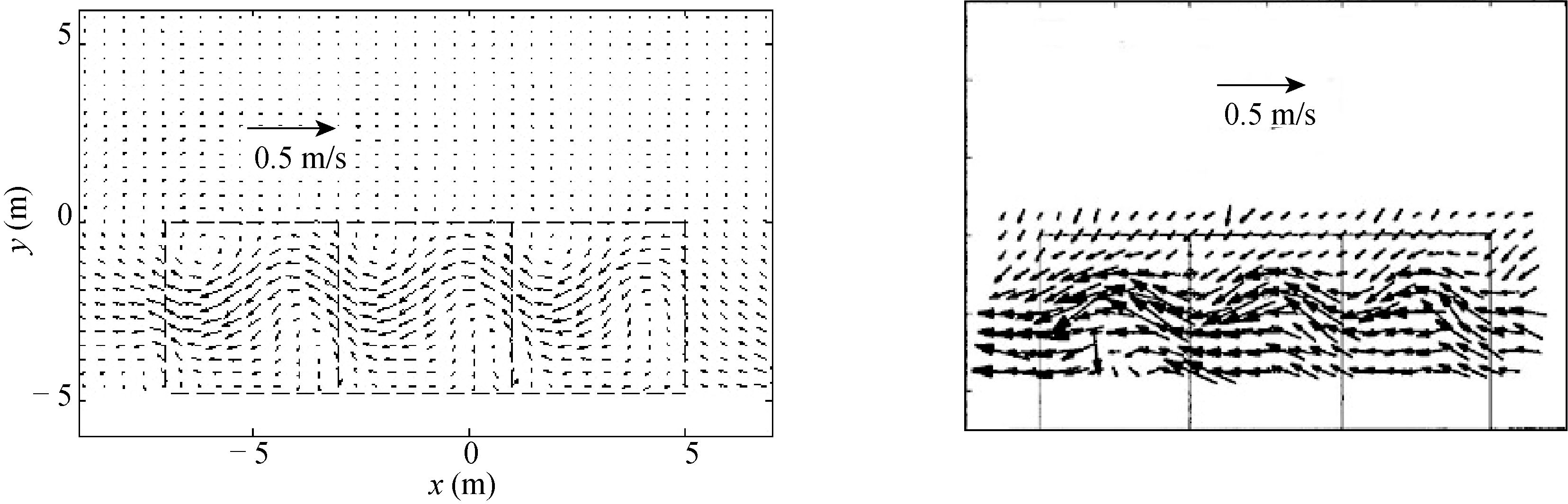
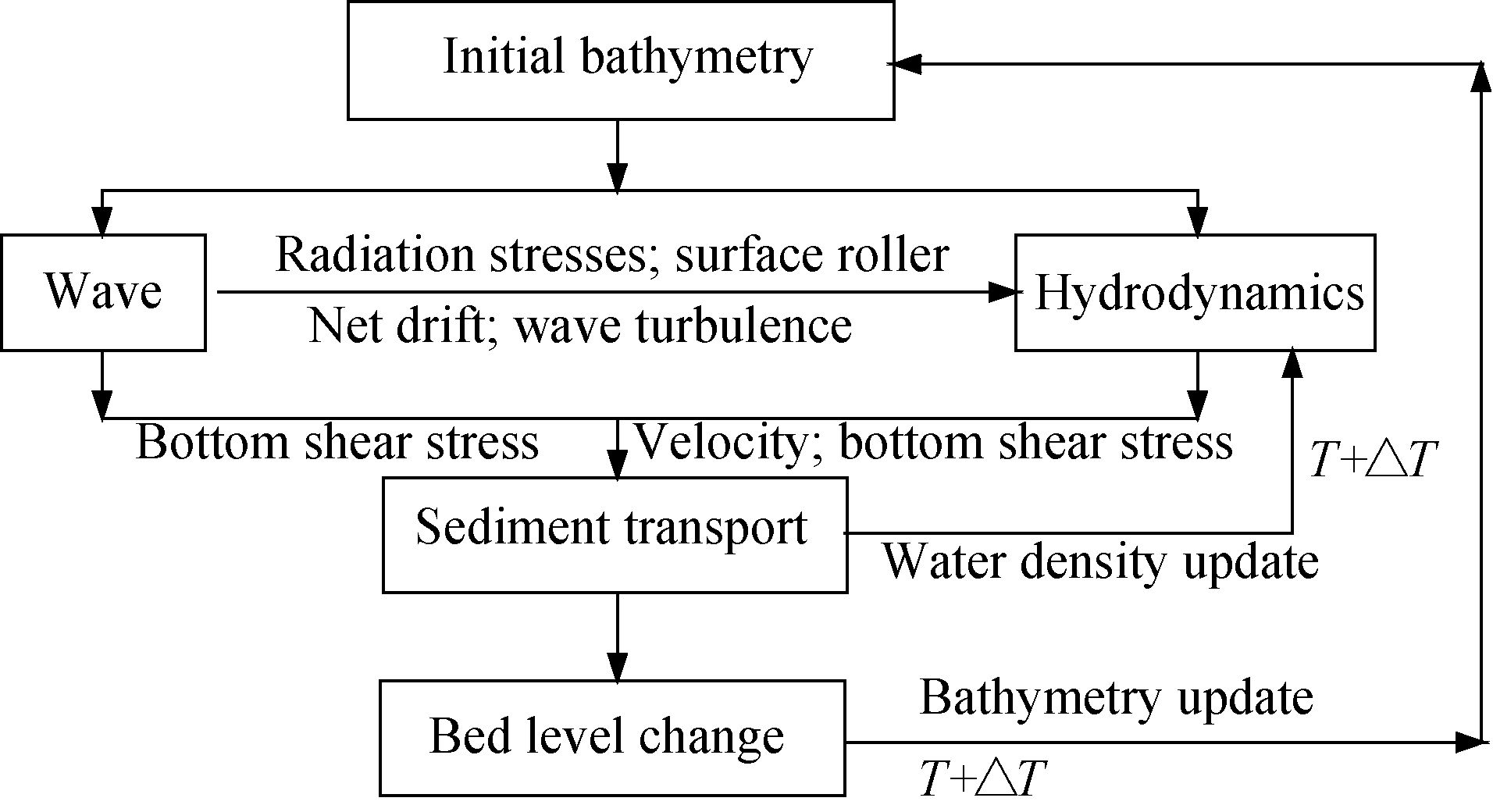
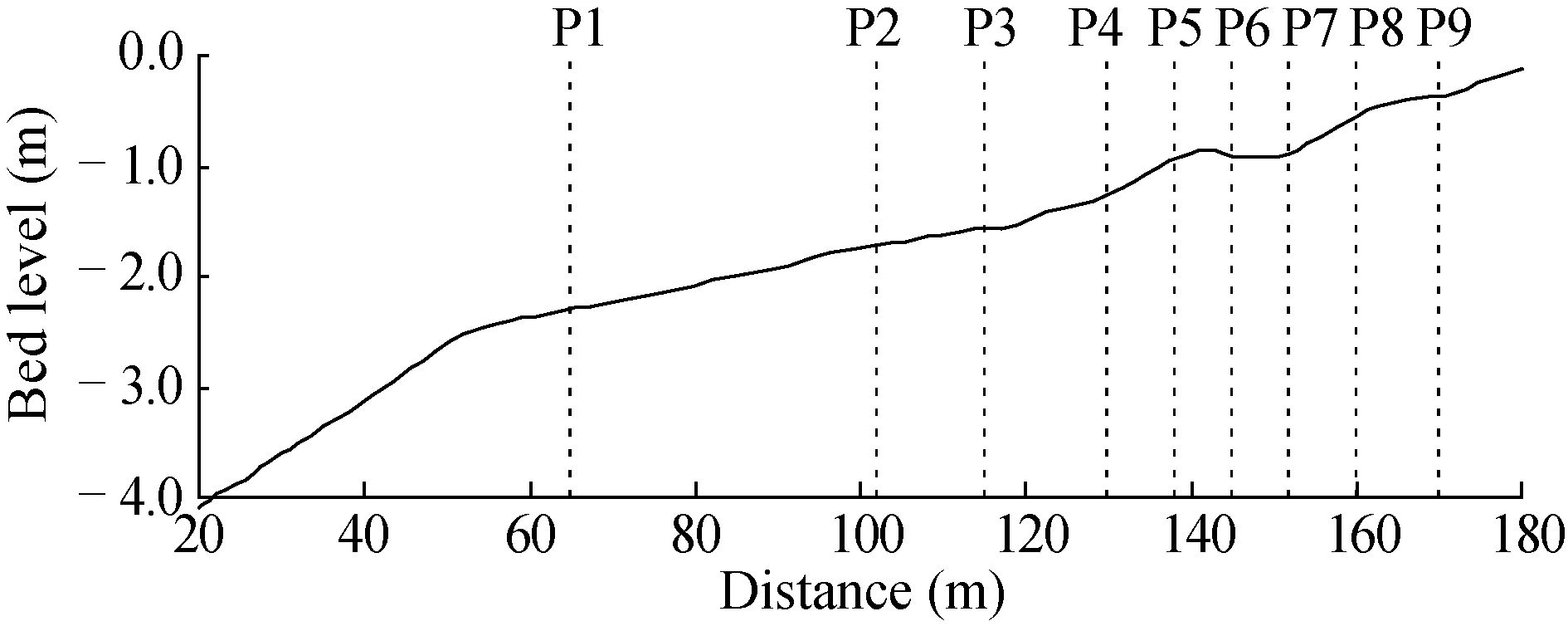
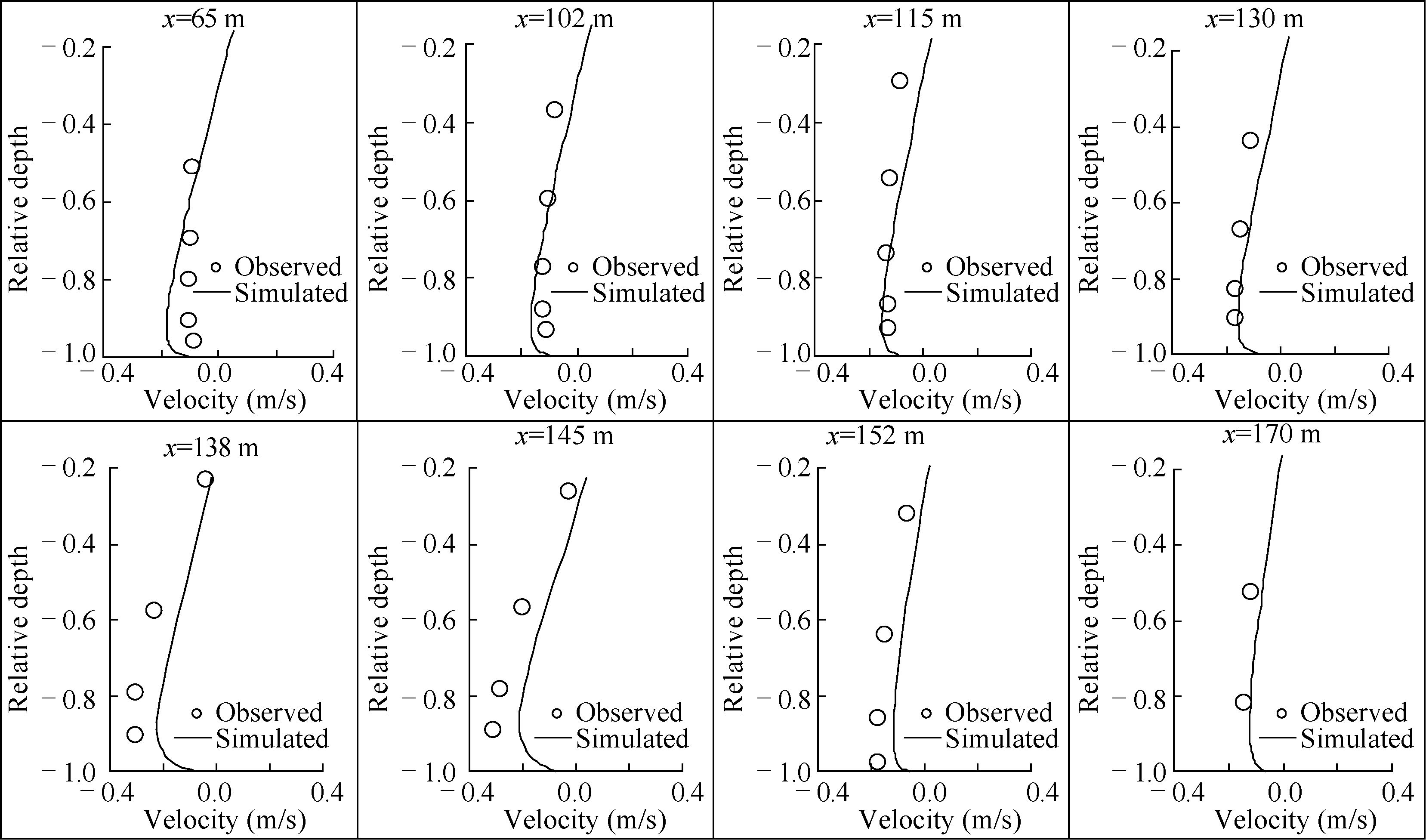
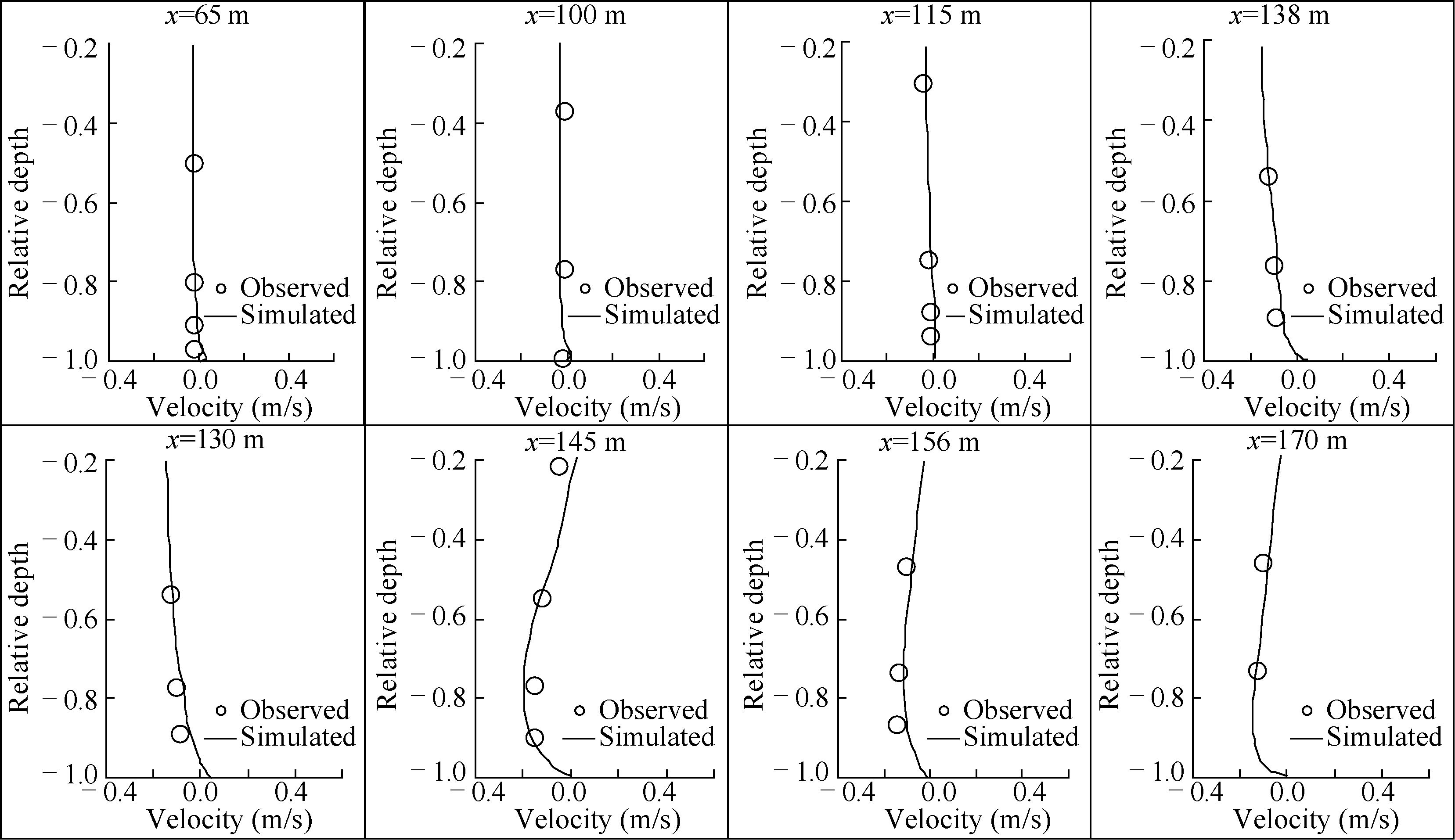
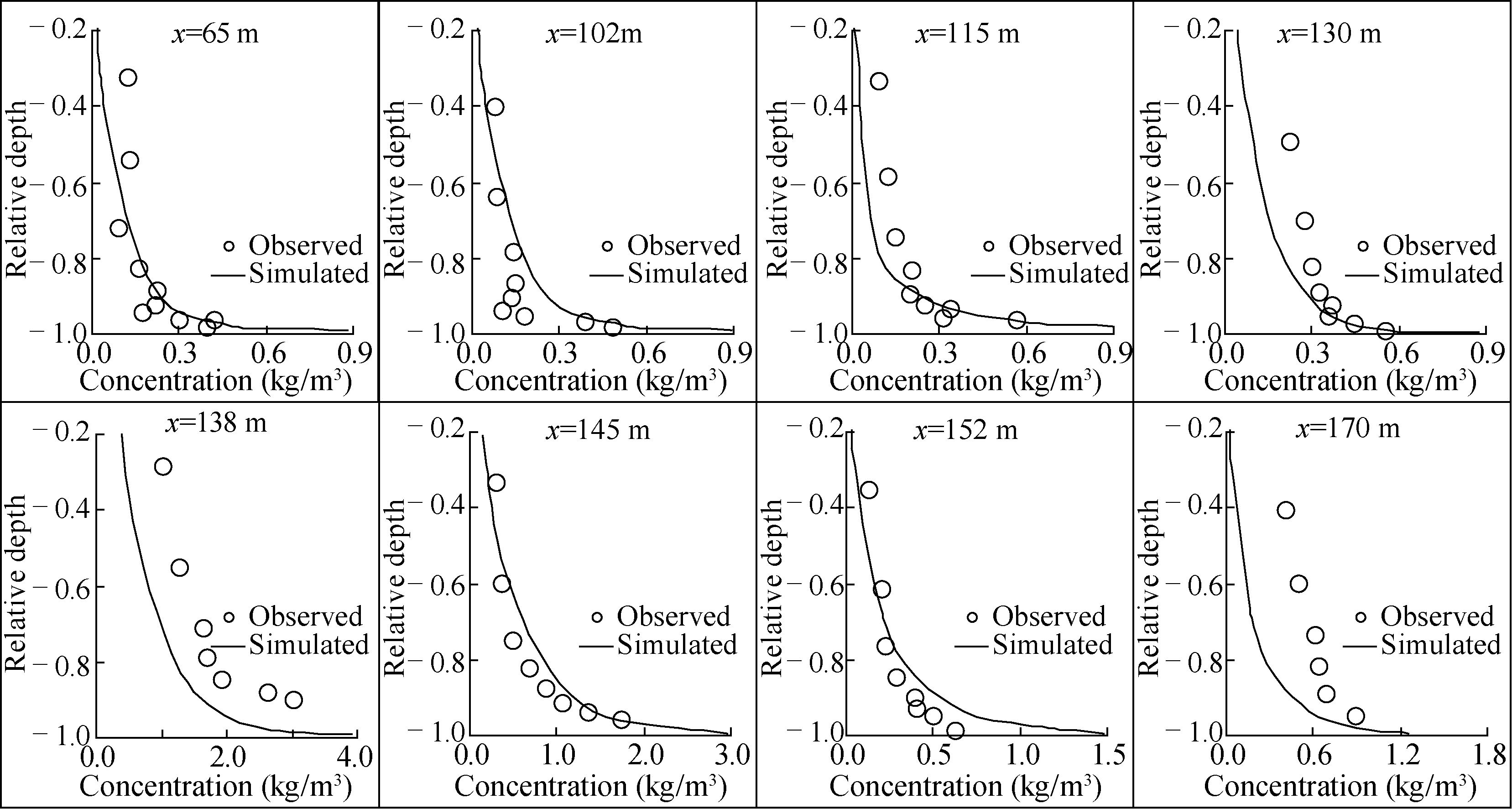
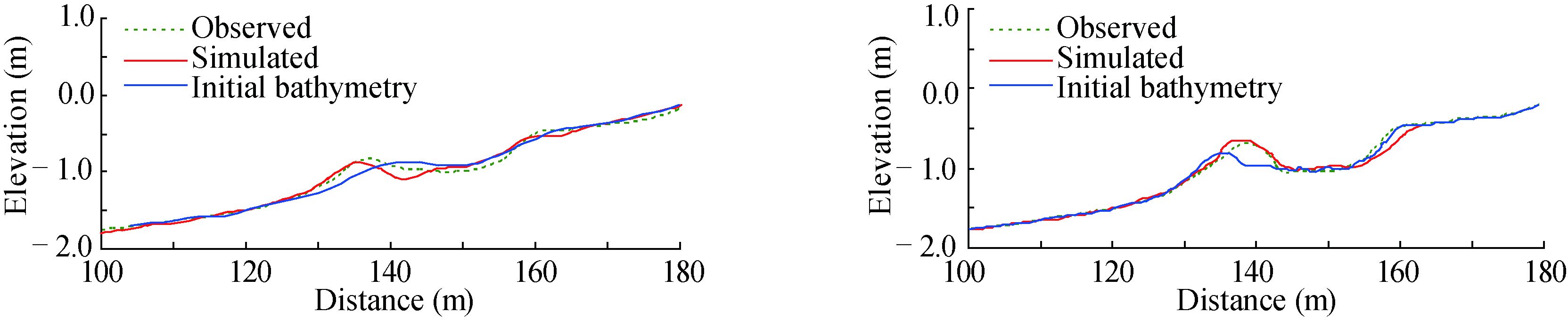
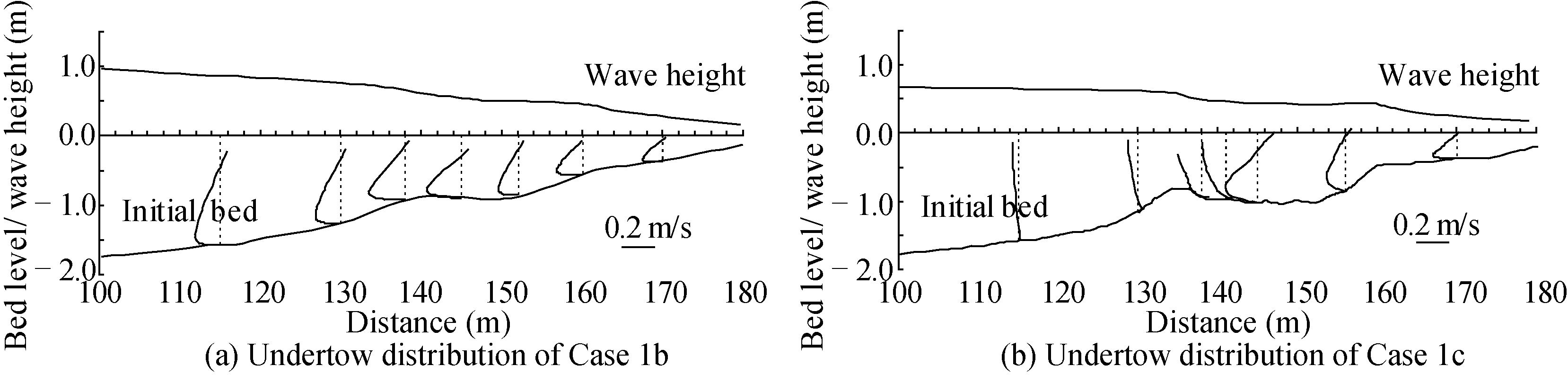
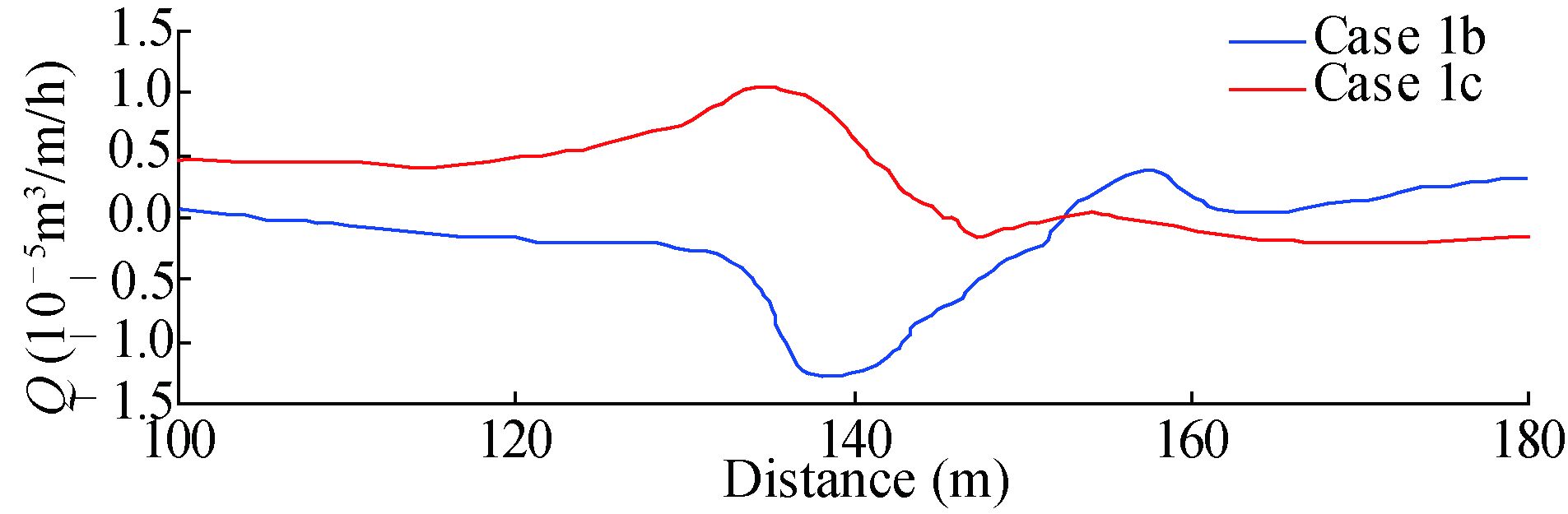
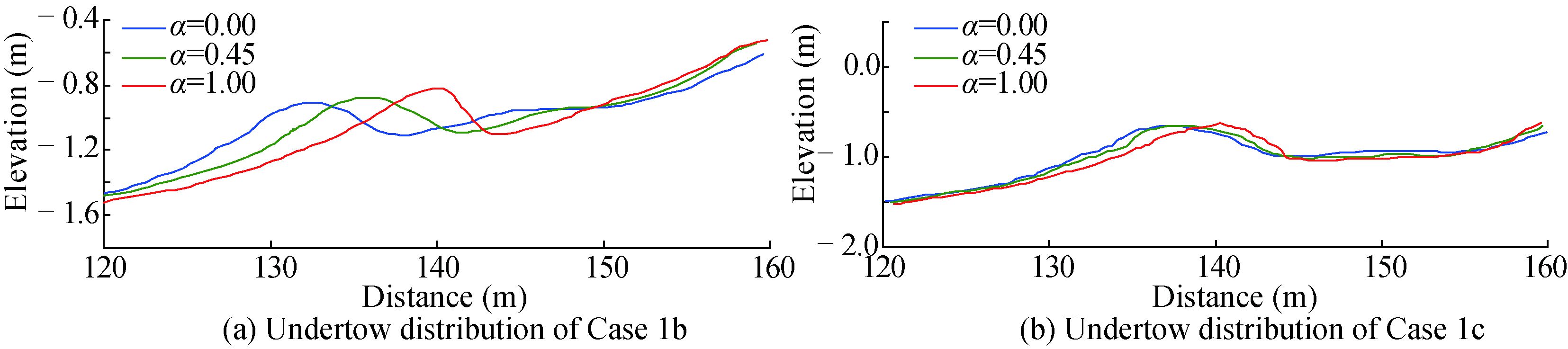
A process-based 3D numerical model for surfzone hydrodynamics and beach evolution was established. Comparisons between the experimental data and model results proved that the model could effectively describe the hydrodynamics, sediment transport feature and sandbar migration process in the surfzone with satisfactory precision. A series of numerical simulations on the wave breaking and shoaling up to a barred beach were carried out based on the model system. Analyzed from the model results, the wave-induced current system in the surfzone consists of two major processes, which are the phase-averaged undertow caused by wave breaking and the net drift caused by both of the nonlinear wave motion and surface roller effect. When storm waves come to the barred beach, the strong offshore undertow along the beach suppresses the onshore net drift, making the initial sandbar migrate to the seaside. Under the condition of calm wave environment, both the undertow and net drift flow to the shoreline at the offshore side of the sandbar, and then push the initial sandbar to the shoreline. The consideration of surface roller has significant impact on the modeling results of the sandbar migration. As the roller transfer rate increases, the sandbar moves onshore especially under the storm wave condition.
A process-based 3D numerical model for surfzone hydrodynamics and beach evolution was established. Comparisons between the experimental data and model results proved that the model could effectively describe the hydrodynamics, sediment transport feature and sandbar migration process in the surfzone with satisfactory precision. A series of numerical simulations on the wave breaking and shoaling up to a barred beach were carried out based on the model system. Analyzed from the model results, the wave-induced current system in the surfzone consists of two major processes, which are the phase-averaged undertow caused by wave breaking and the net drift caused by both of the nonlinear wave motion and surface roller effect. When storm waves come to the barred beach, the strong offshore undertow along the beach suppresses the onshore net drift, making the initial sandbar migrate to the seaside. Under the condition of calm wave environment, both the undertow and net drift flow to the shoreline at the offshore side of the sandbar, and then push the initial sandbar to the shoreline. The consideration of surface roller has significant impact on the modeling results of the sandbar migration. As the roller transfer rate increases, the sandbar moves onshore especially under the storm wave condition.


2017, 31(5): 559-566.
doi: 10.1007/s13344-017-0064-8
Abstract:
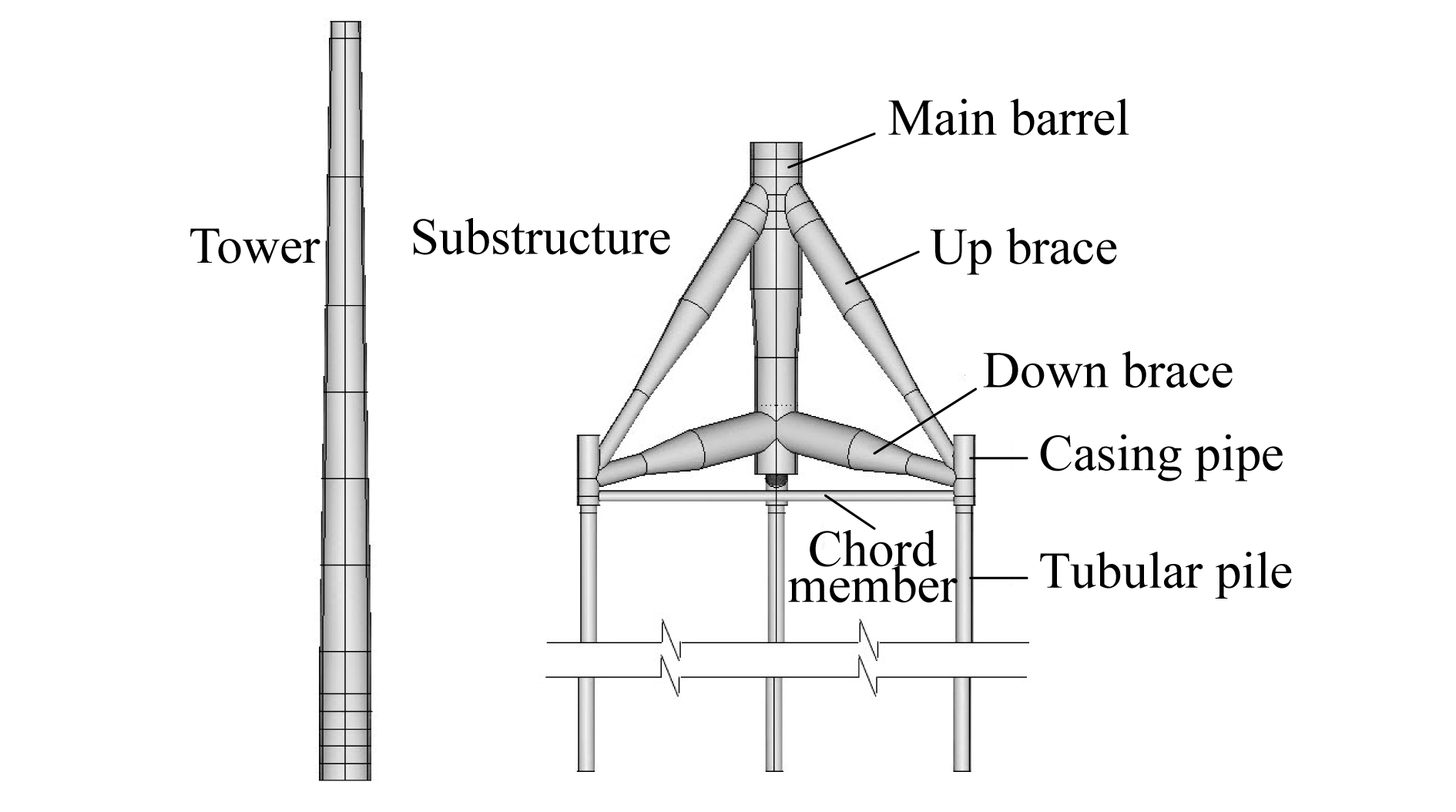
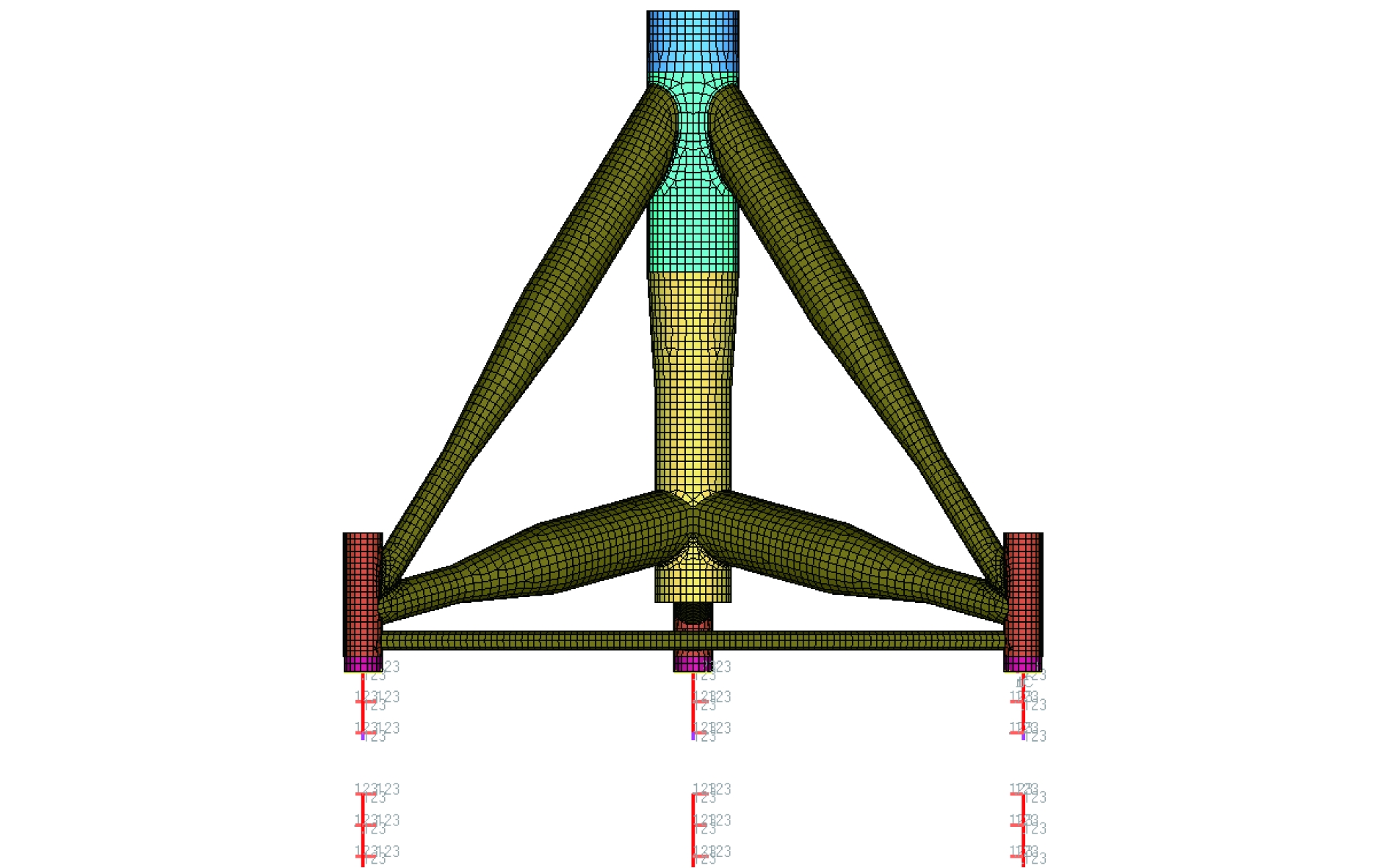
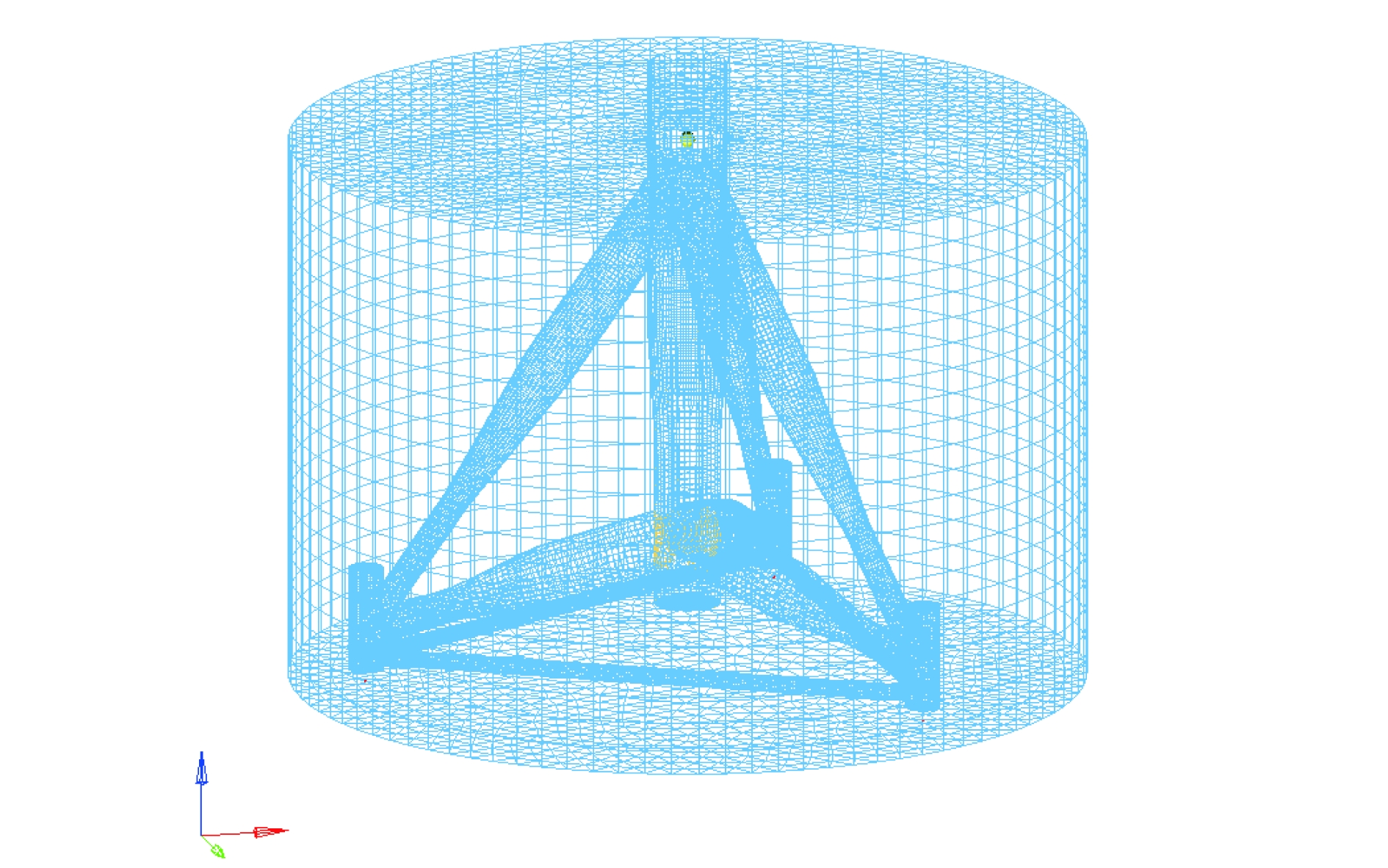
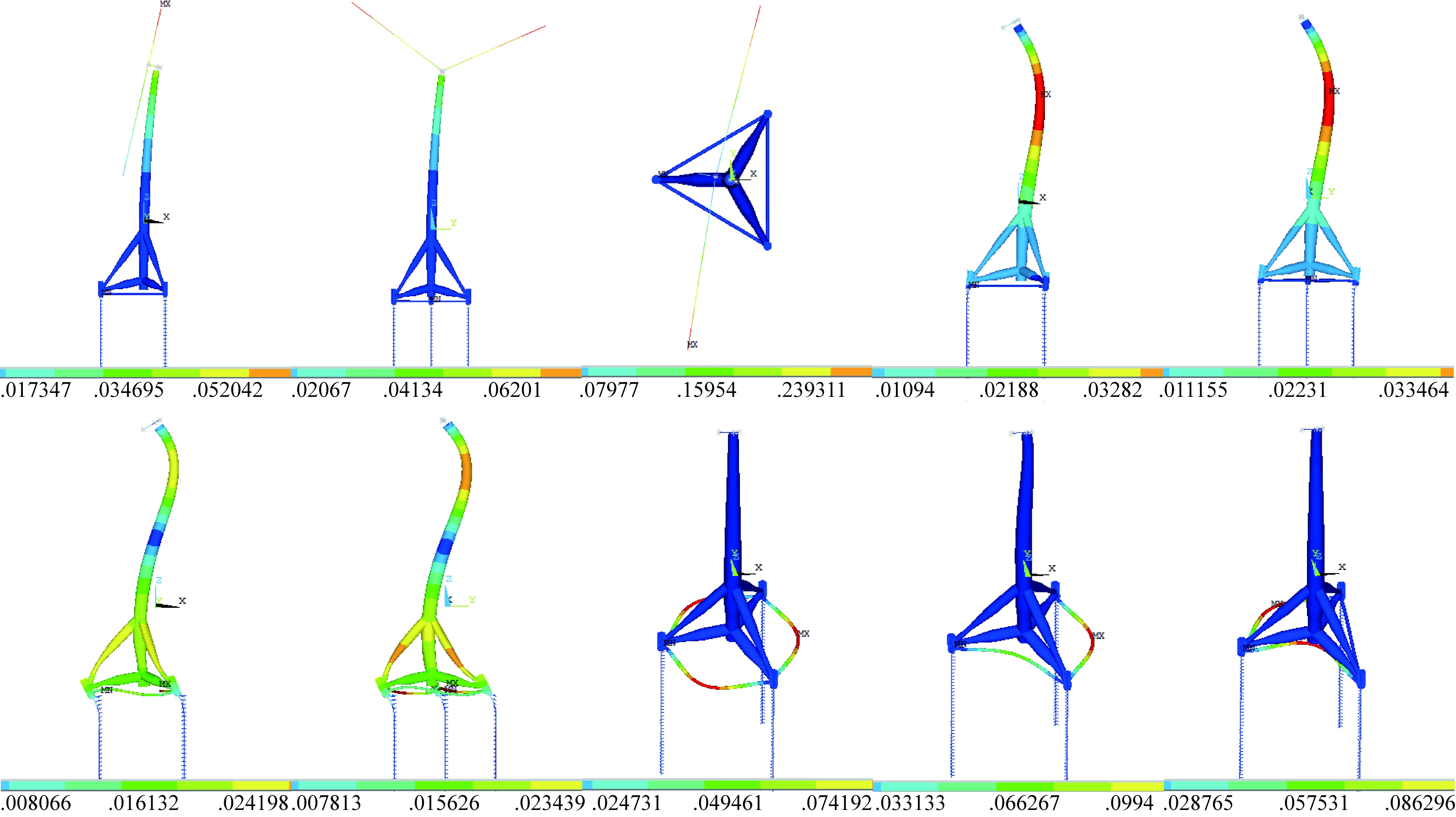
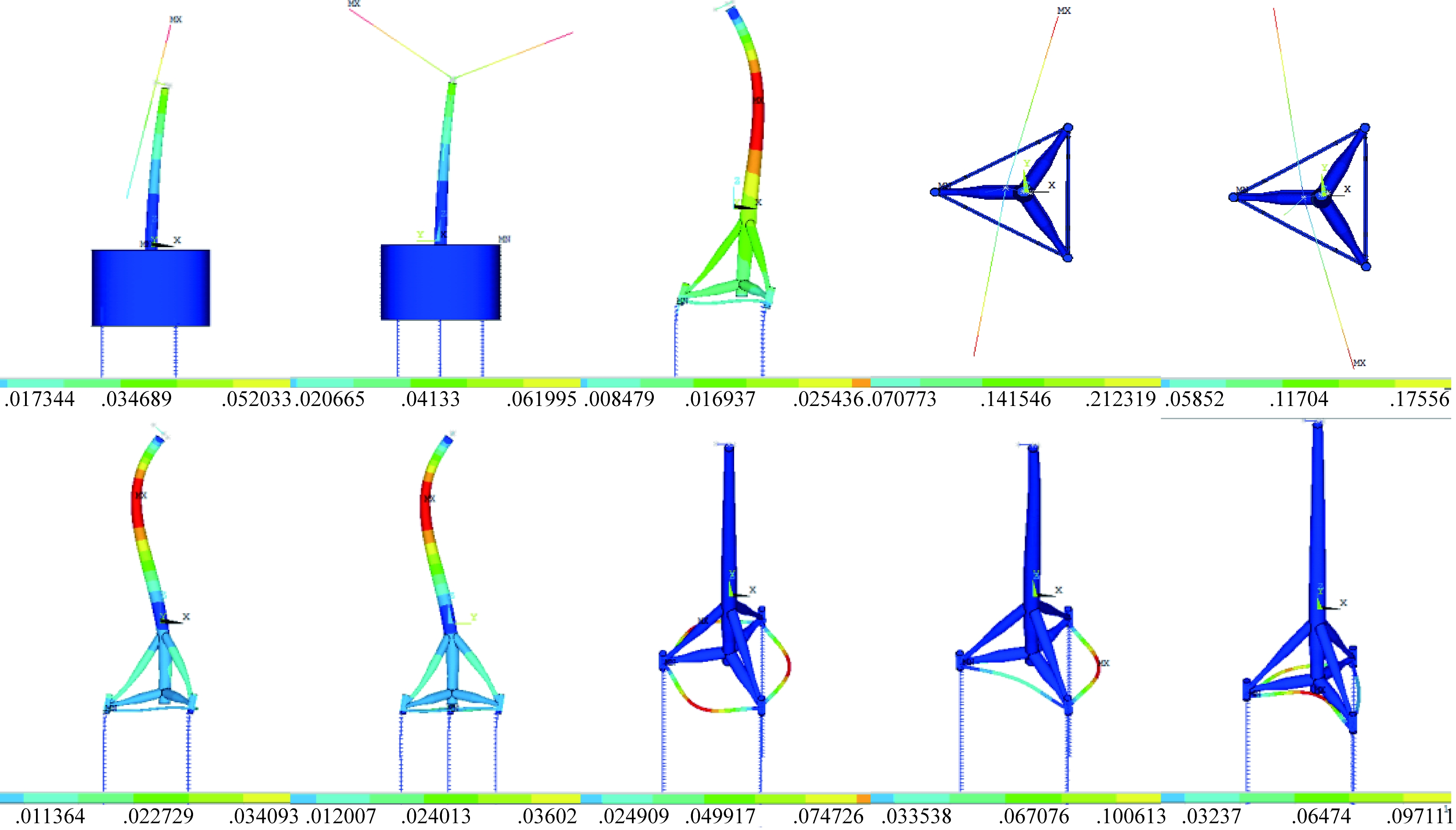
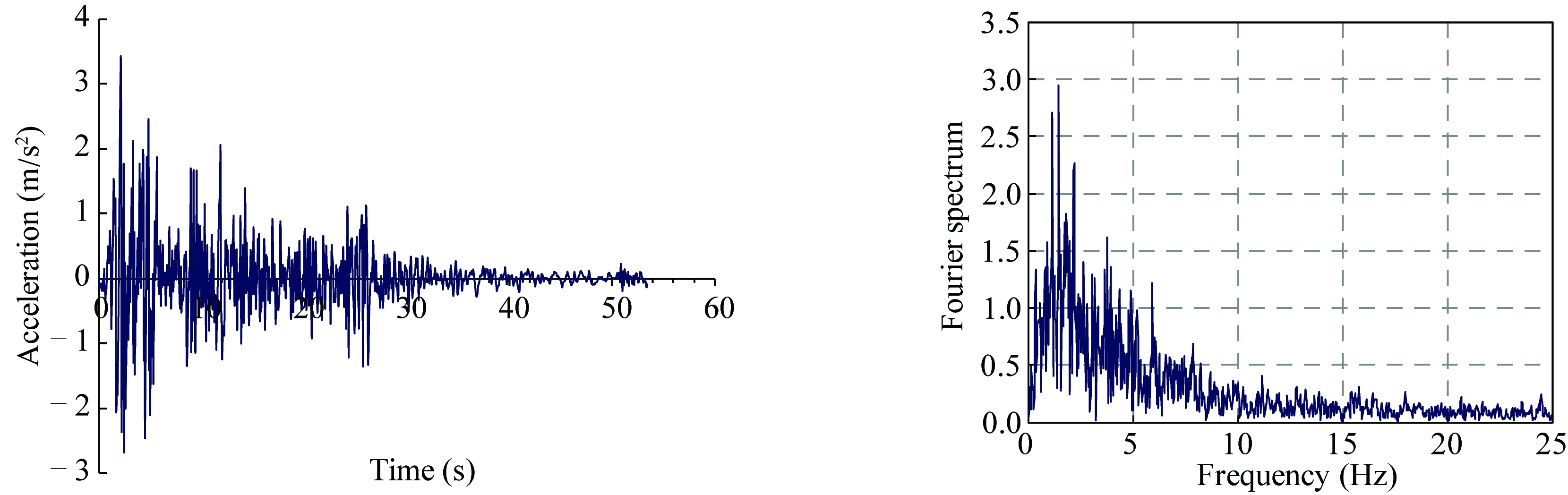
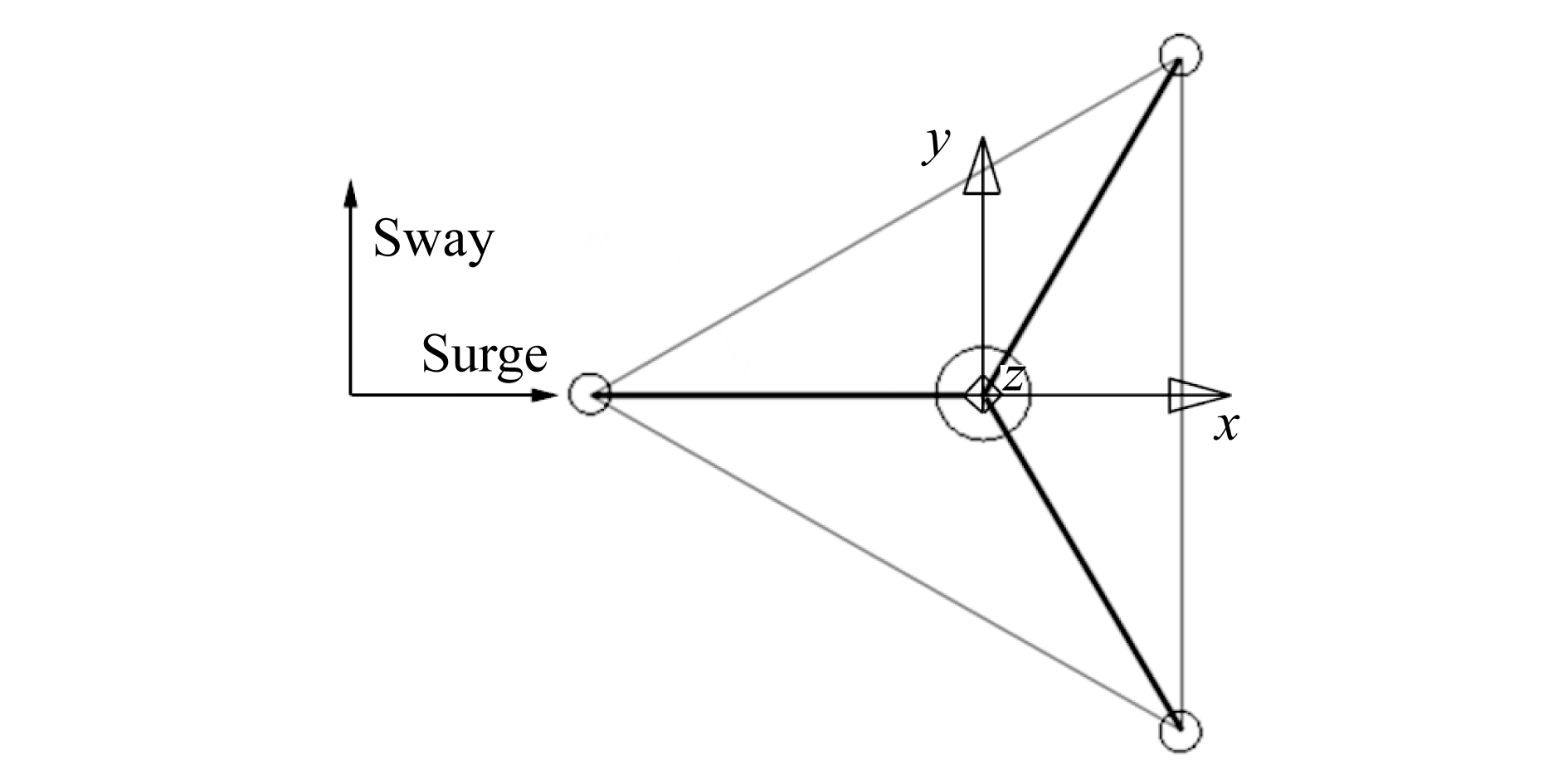
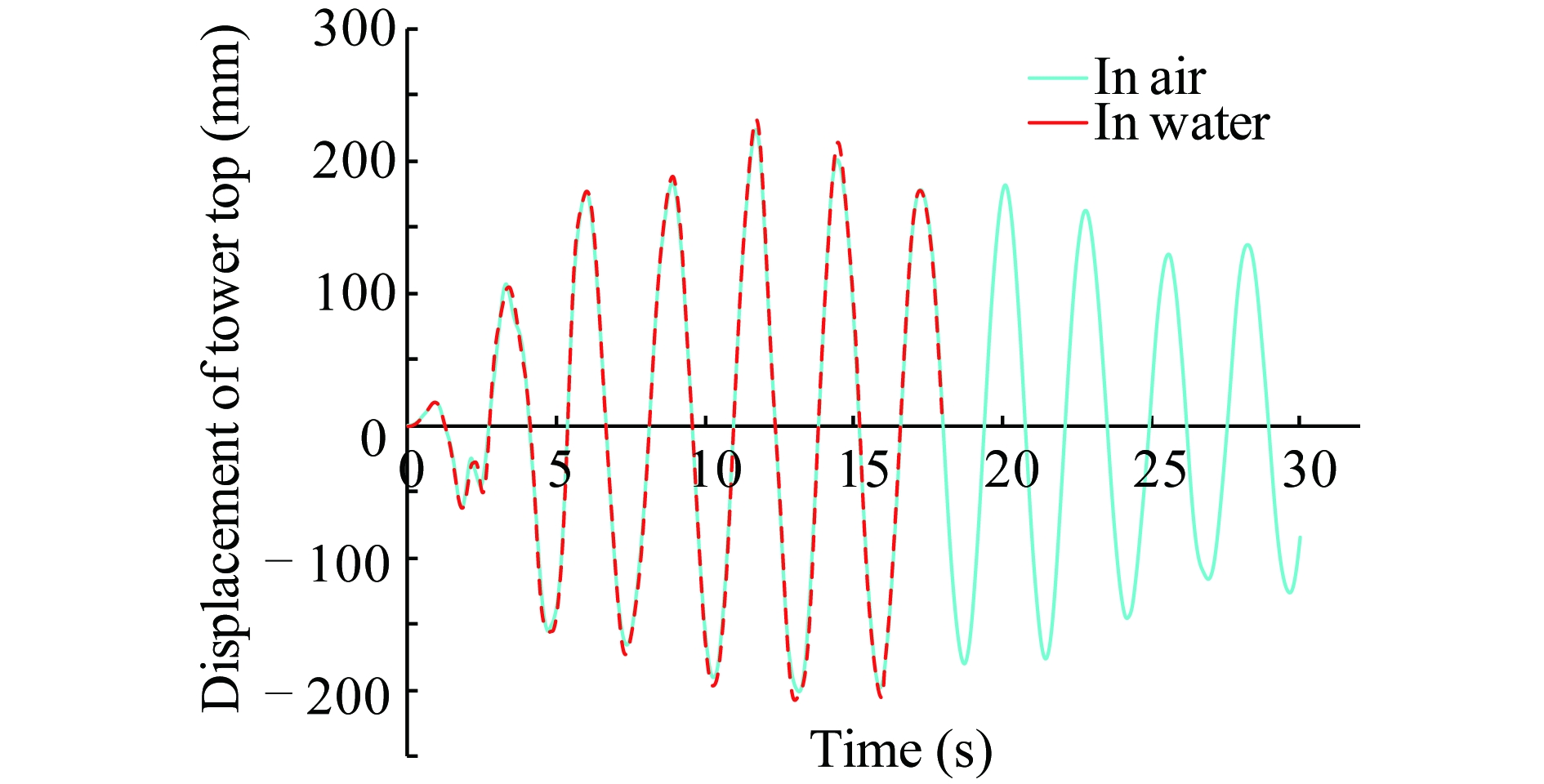
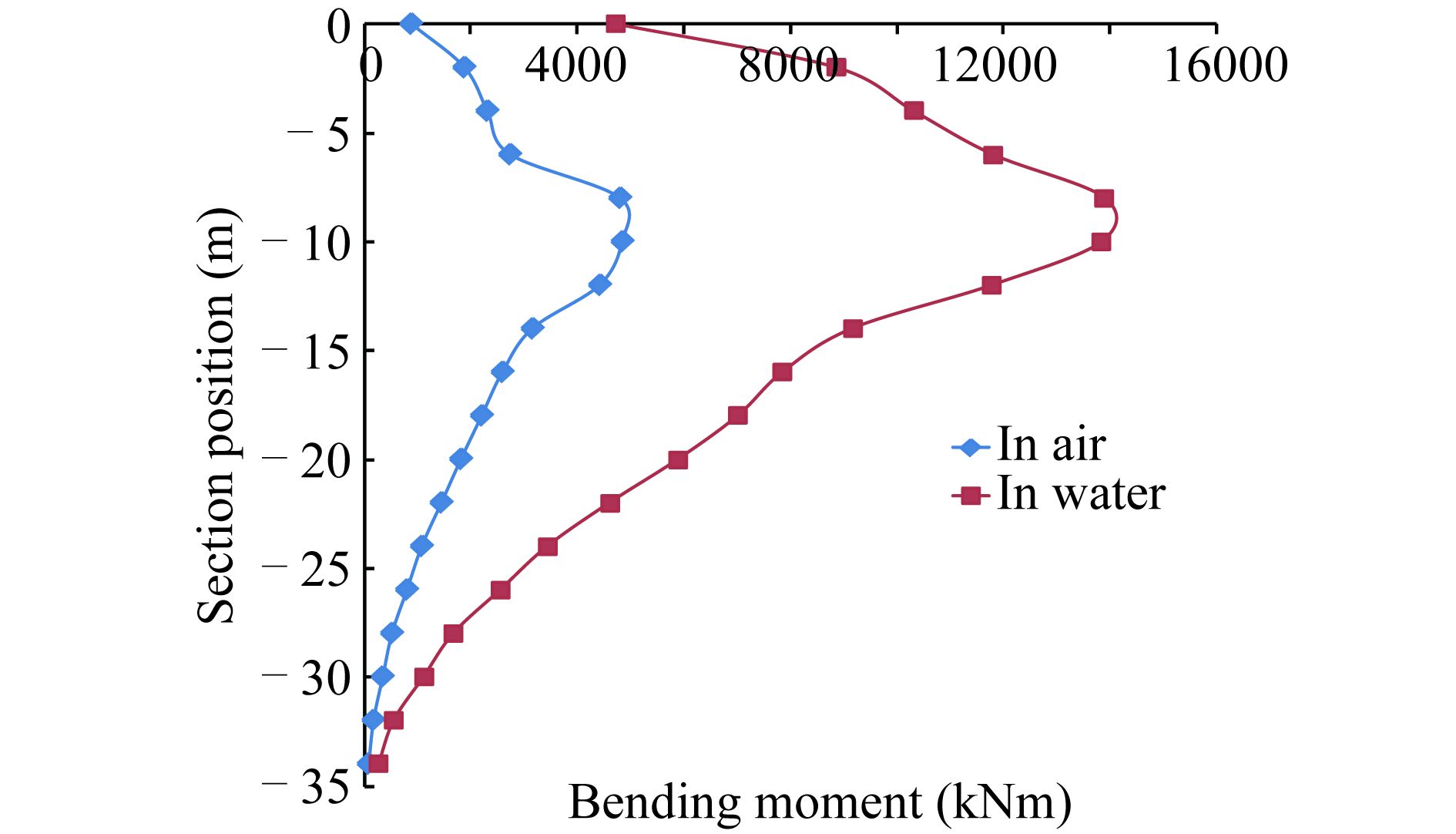
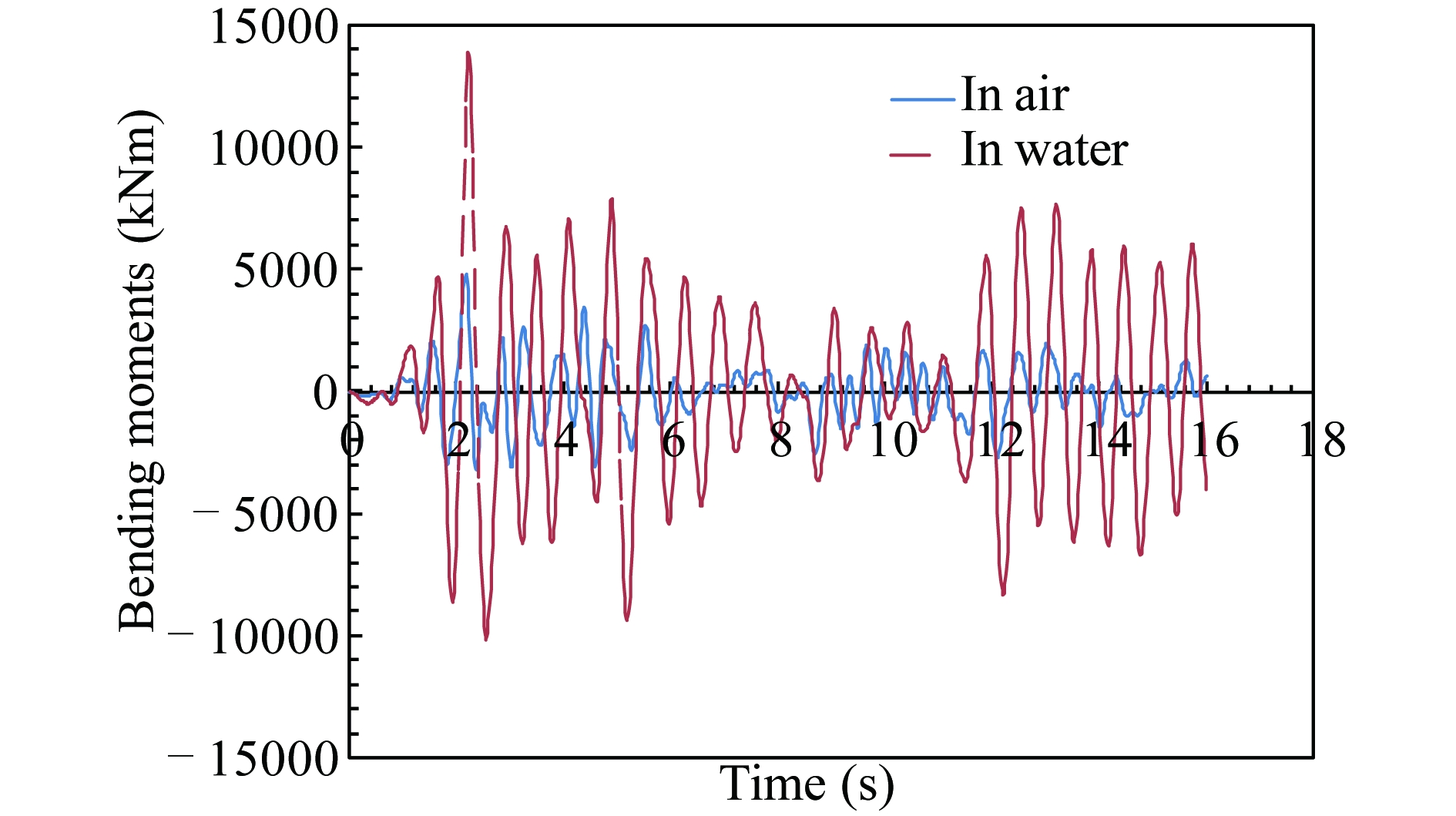
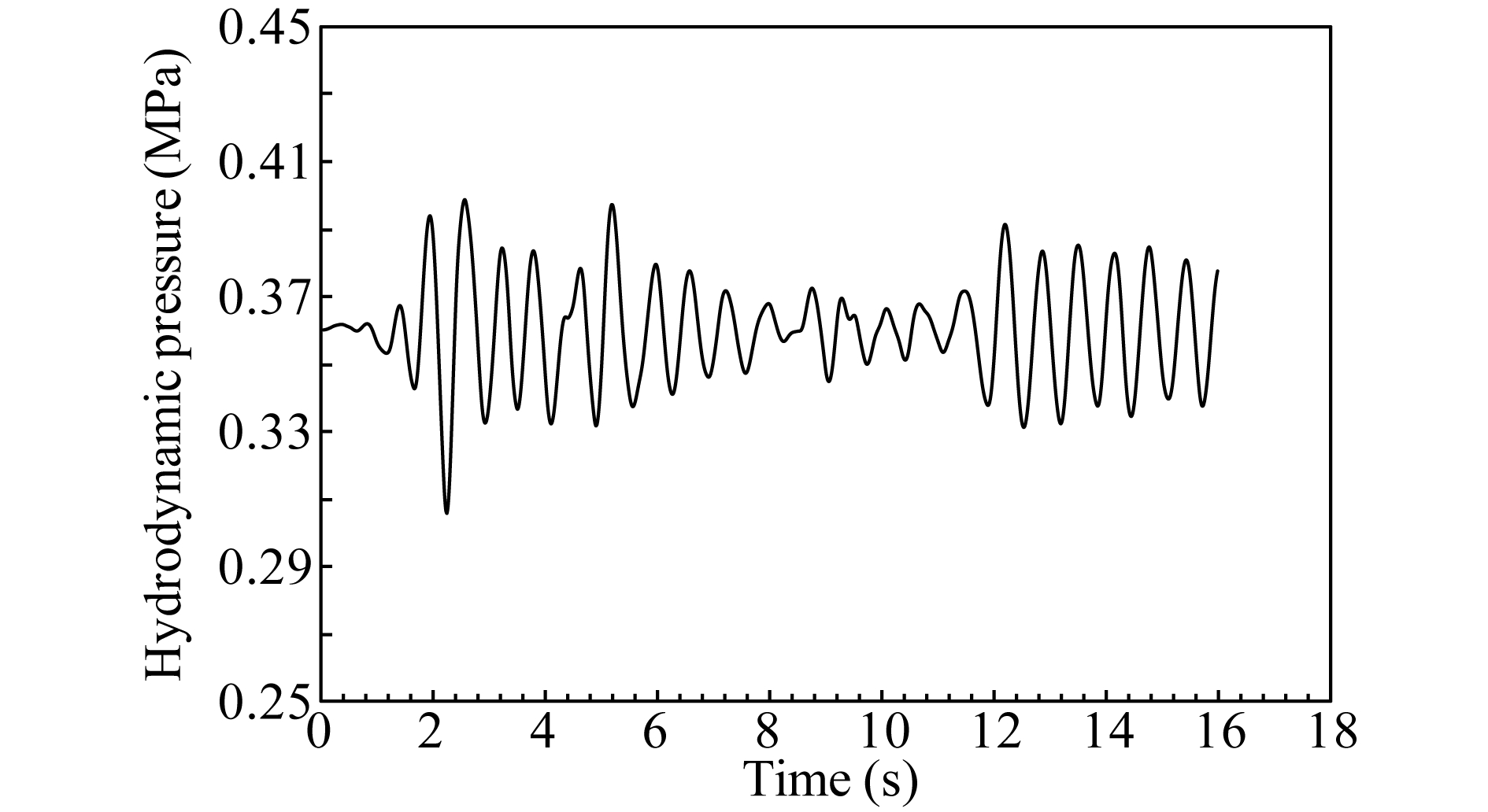
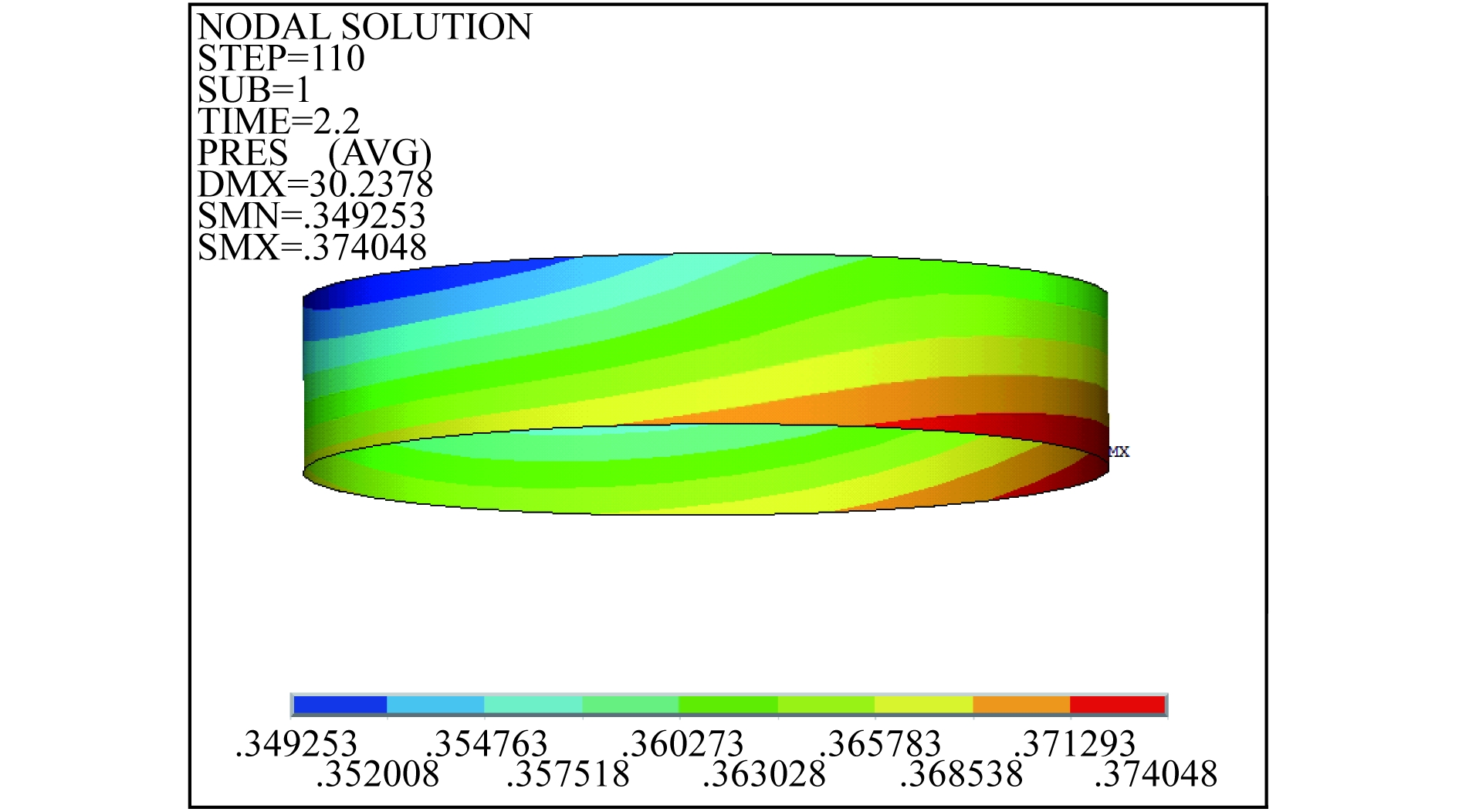
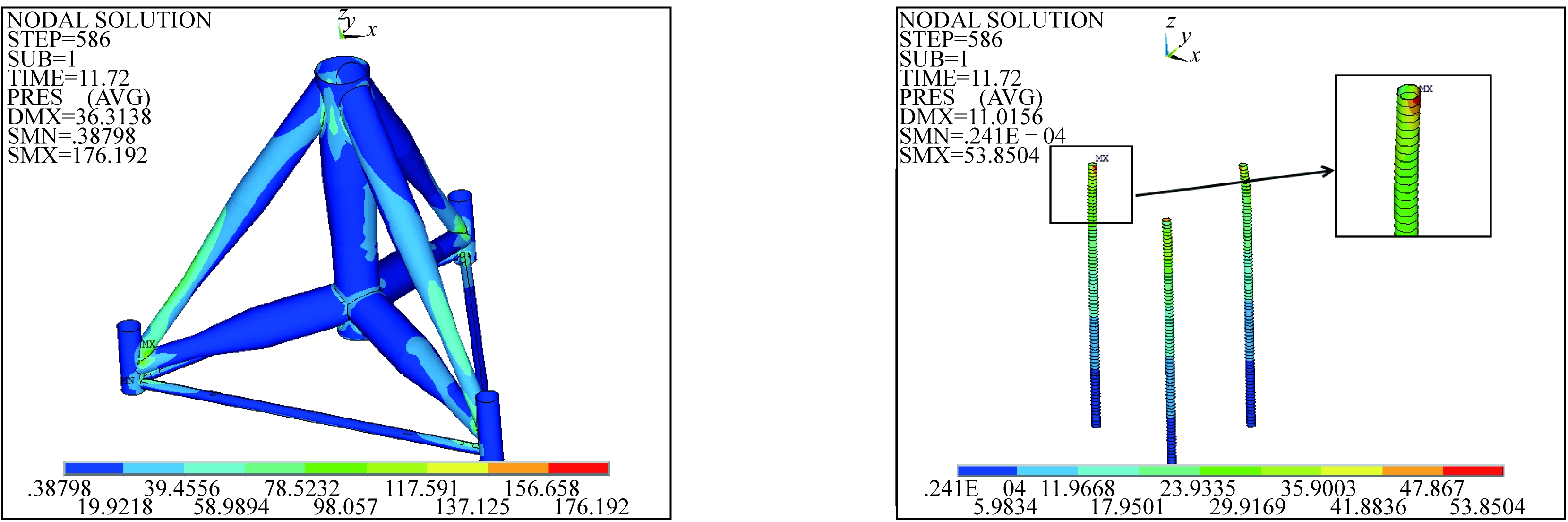
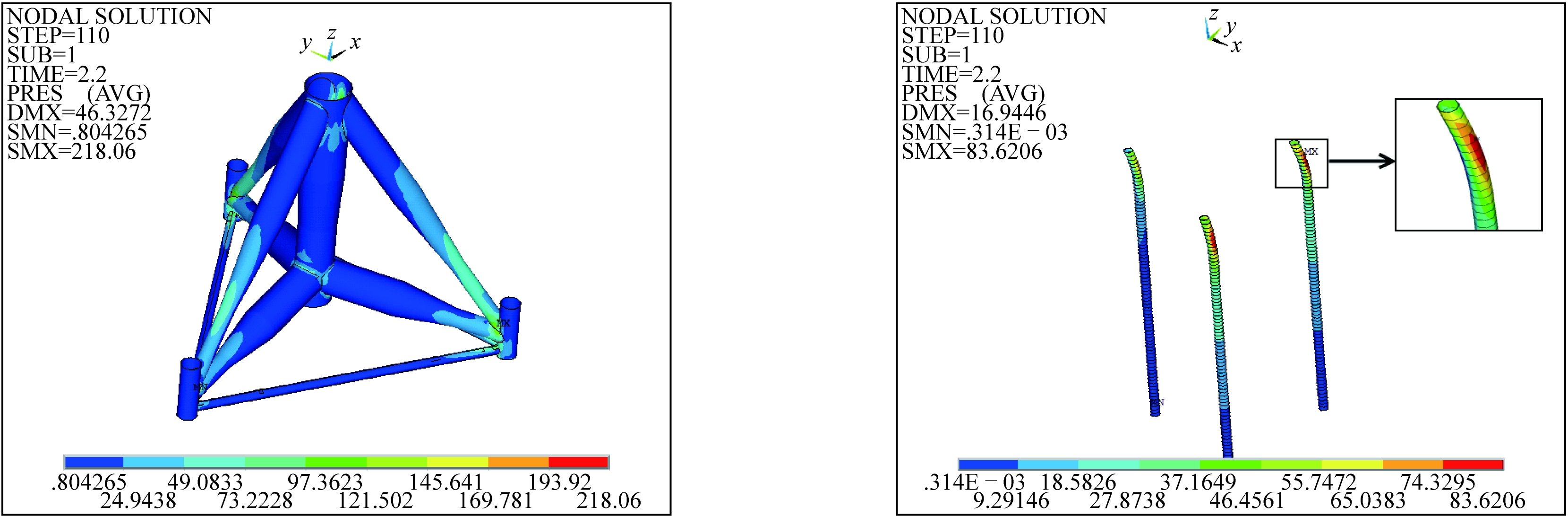
Fixed offshore wind turbines usually have large underwater supporting structures. The fluid influences the dynamic characteristics of the structure system. The dynamic model of a 5-MW tripod offshore wind turbine considering the pile–soil system and fluid structure interaction (FSI) is established, and the structural modes in air and in water are obtained by use of ANSYS. By comparing low-order natural frequencies and mode shapes, the influence of sea water on the free vibration characteristics of offshore wind turbine is analyzed. On basis of the above work, seismic responses under excitation by El-Centro waves are calculated by the time-history analysis method. The results reveal that the dynamic responses such as the lateral displacement of the foundation and the section bending moment of the tubular piles increase substantially under the influence of the added-mass and hydrodynamic pressure of sea water. The method and conclusions presented in this paper can provide a theoretical reference for structure design and analysis of offshore wind turbines fixed in deep seawater.
Fixed offshore wind turbines usually have large underwater supporting structures. The fluid influences the dynamic characteristics of the structure system. The dynamic model of a 5-MW tripod offshore wind turbine considering the pile–soil system and fluid structure interaction (FSI) is established, and the structural modes in air and in water are obtained by use of ANSYS. By comparing low-order natural frequencies and mode shapes, the influence of sea water on the free vibration characteristics of offshore wind turbine is analyzed. On basis of the above work, seismic responses under excitation by El-Centro waves are calculated by the time-history analysis method. The results reveal that the dynamic responses such as the lateral displacement of the foundation and the section bending moment of the tubular piles increase substantially under the influence of the added-mass and hydrodynamic pressure of sea water. The method and conclusions presented in this paper can provide a theoretical reference for structure design and analysis of offshore wind turbines fixed in deep seawater.

2017, 31(5): 567-577.
doi: 10.1007/s13344-017-0065-7
Abstract:
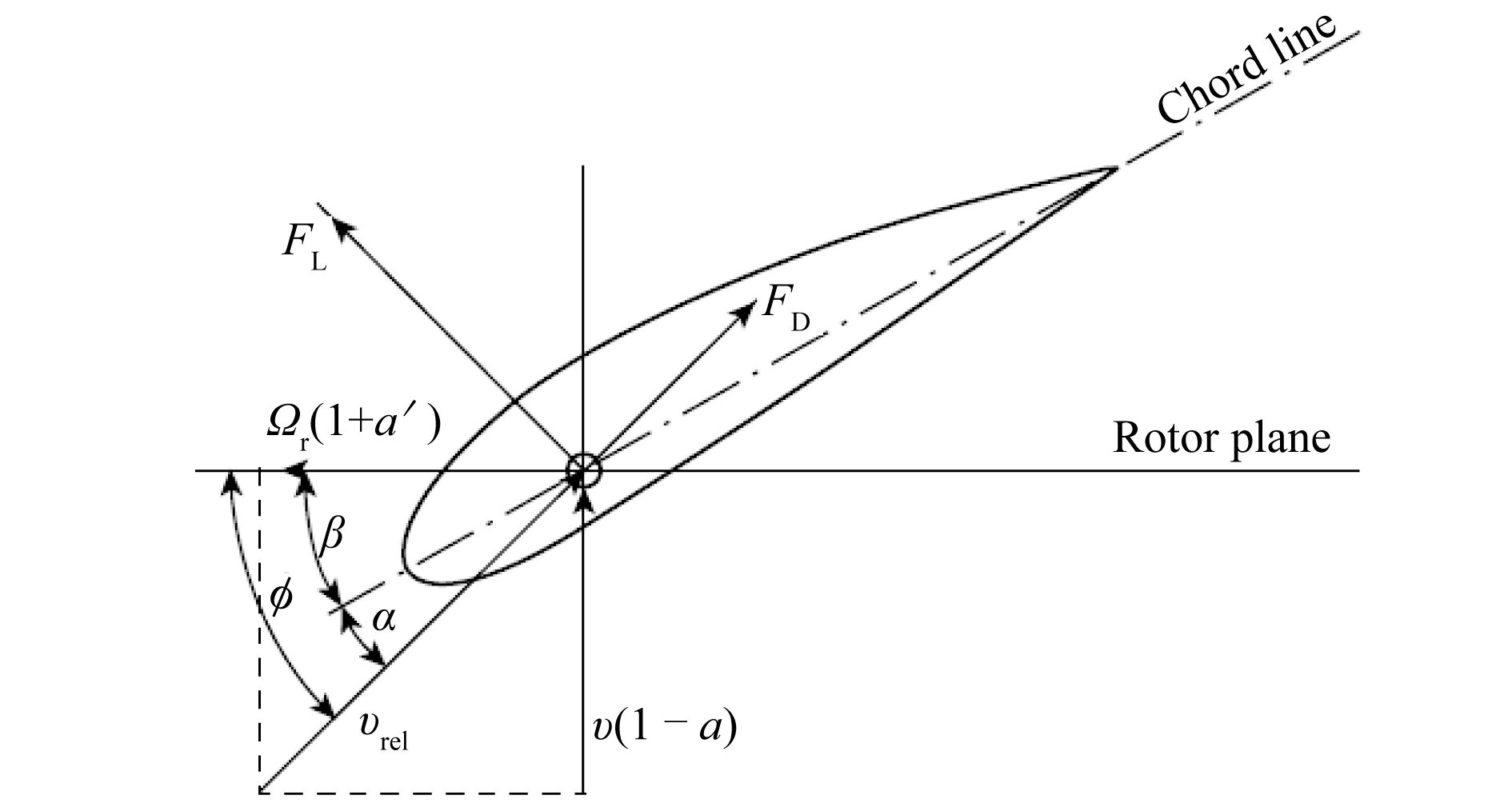
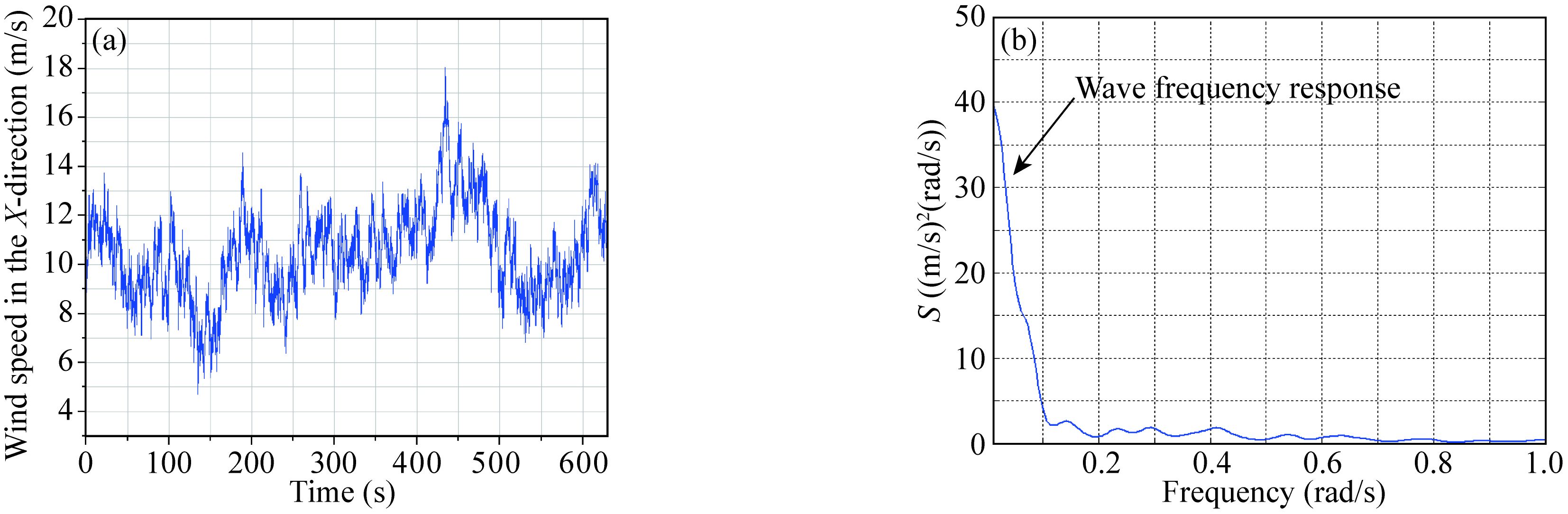
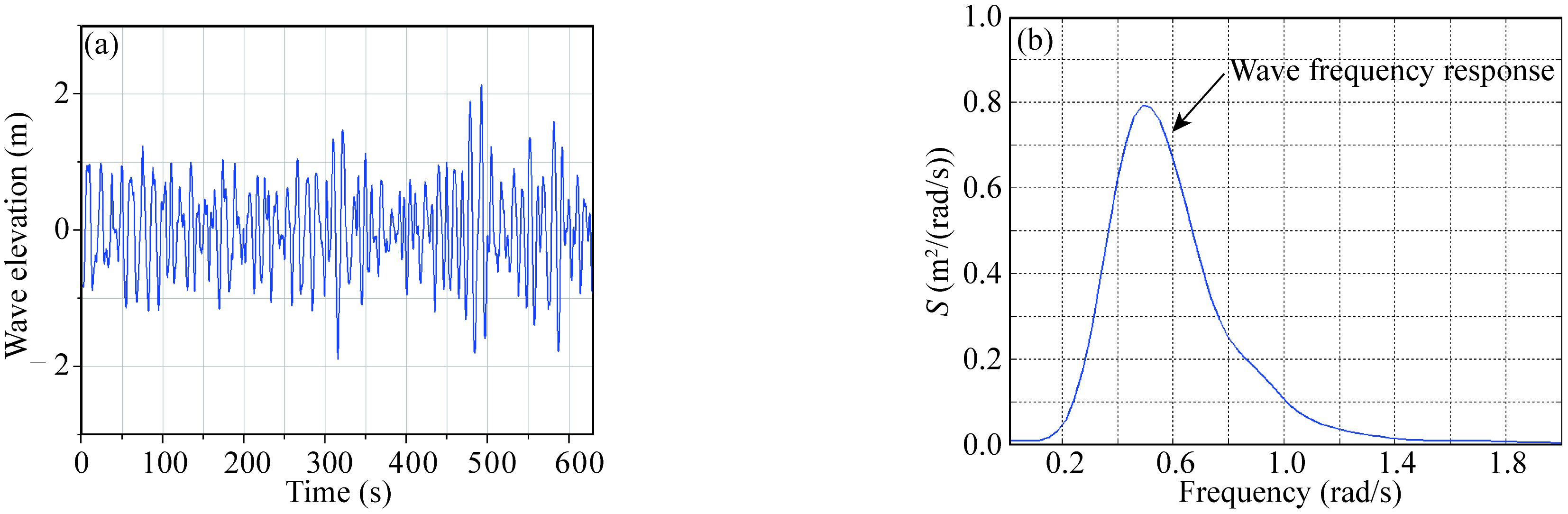
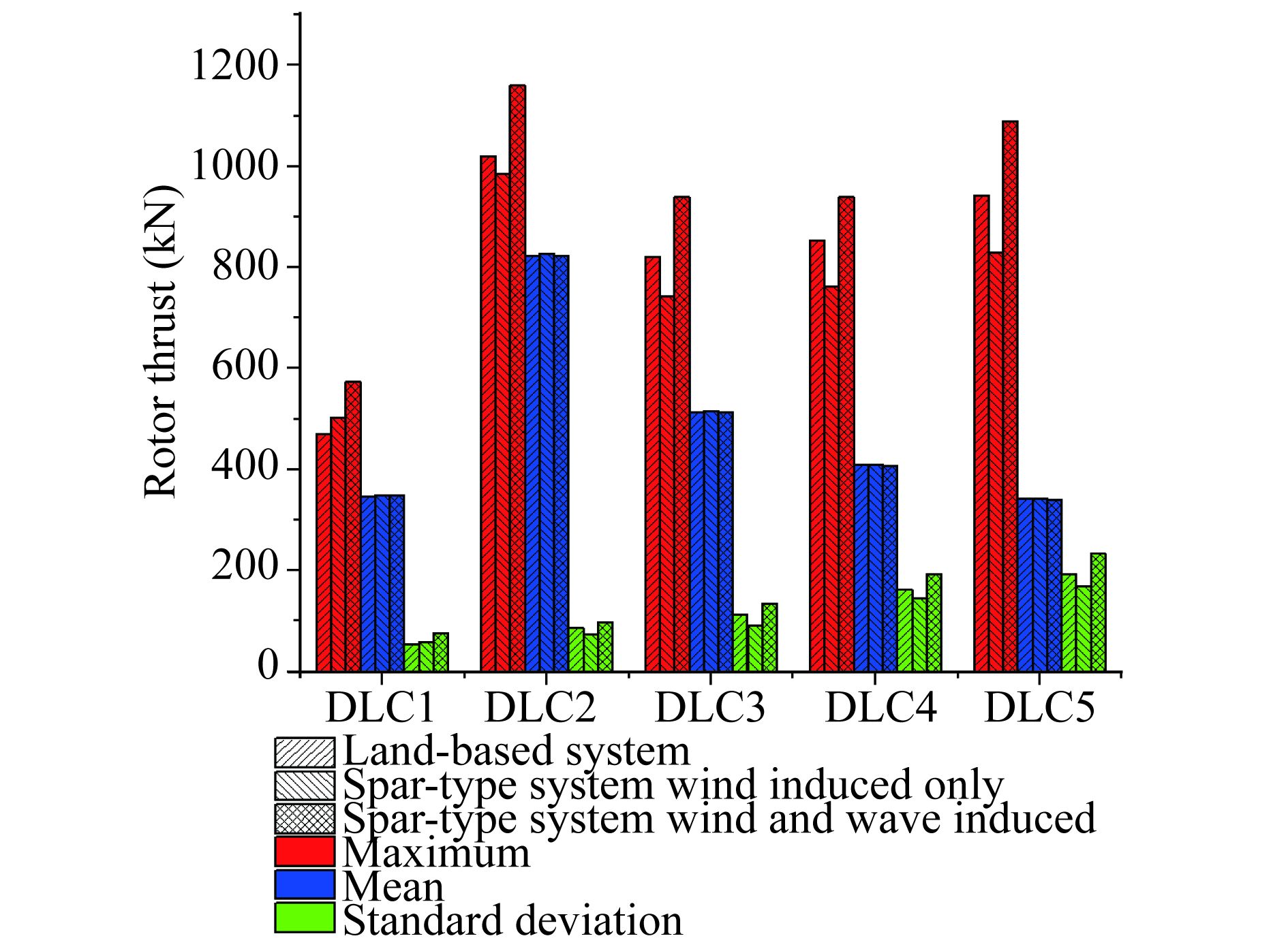
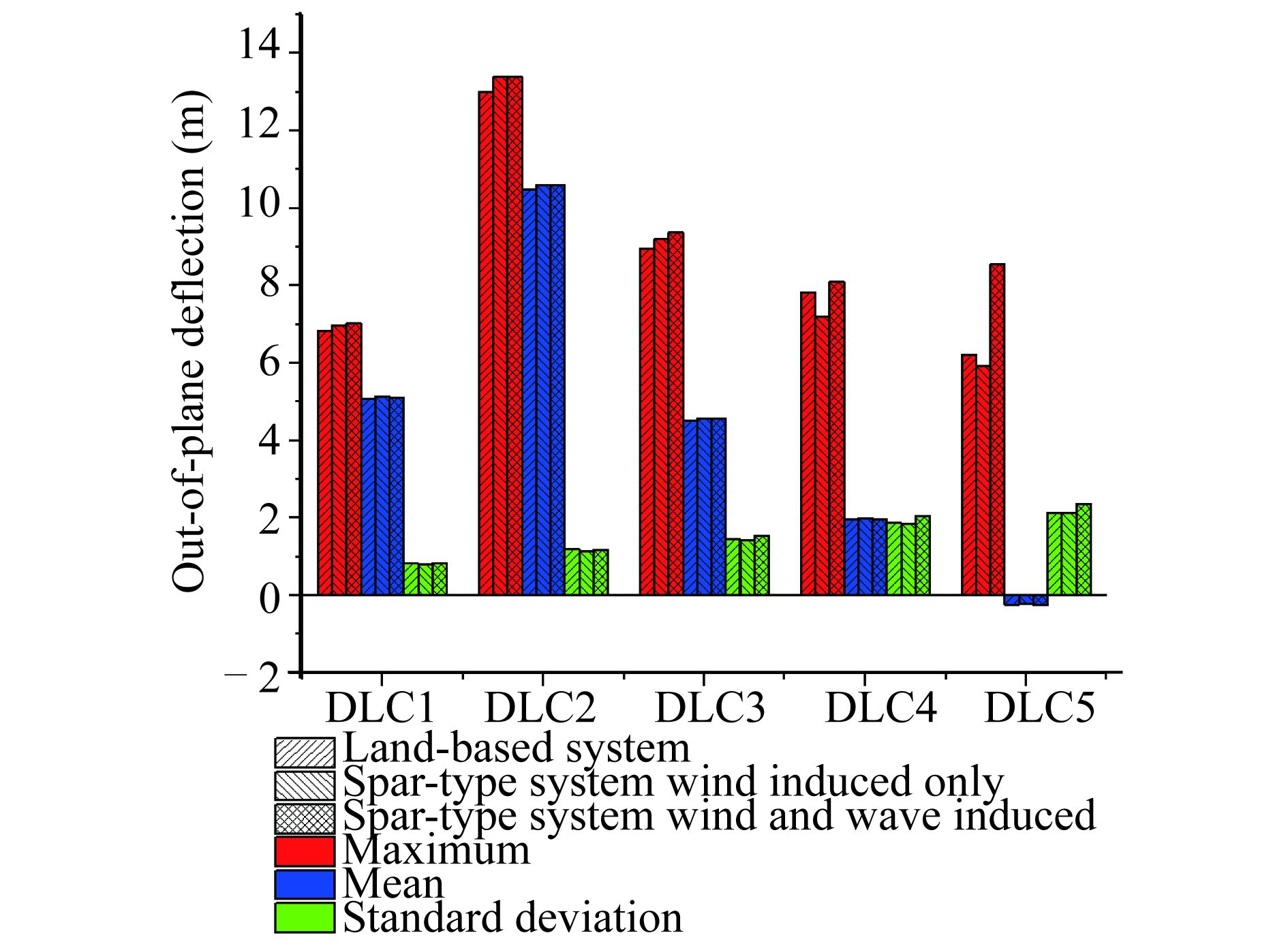
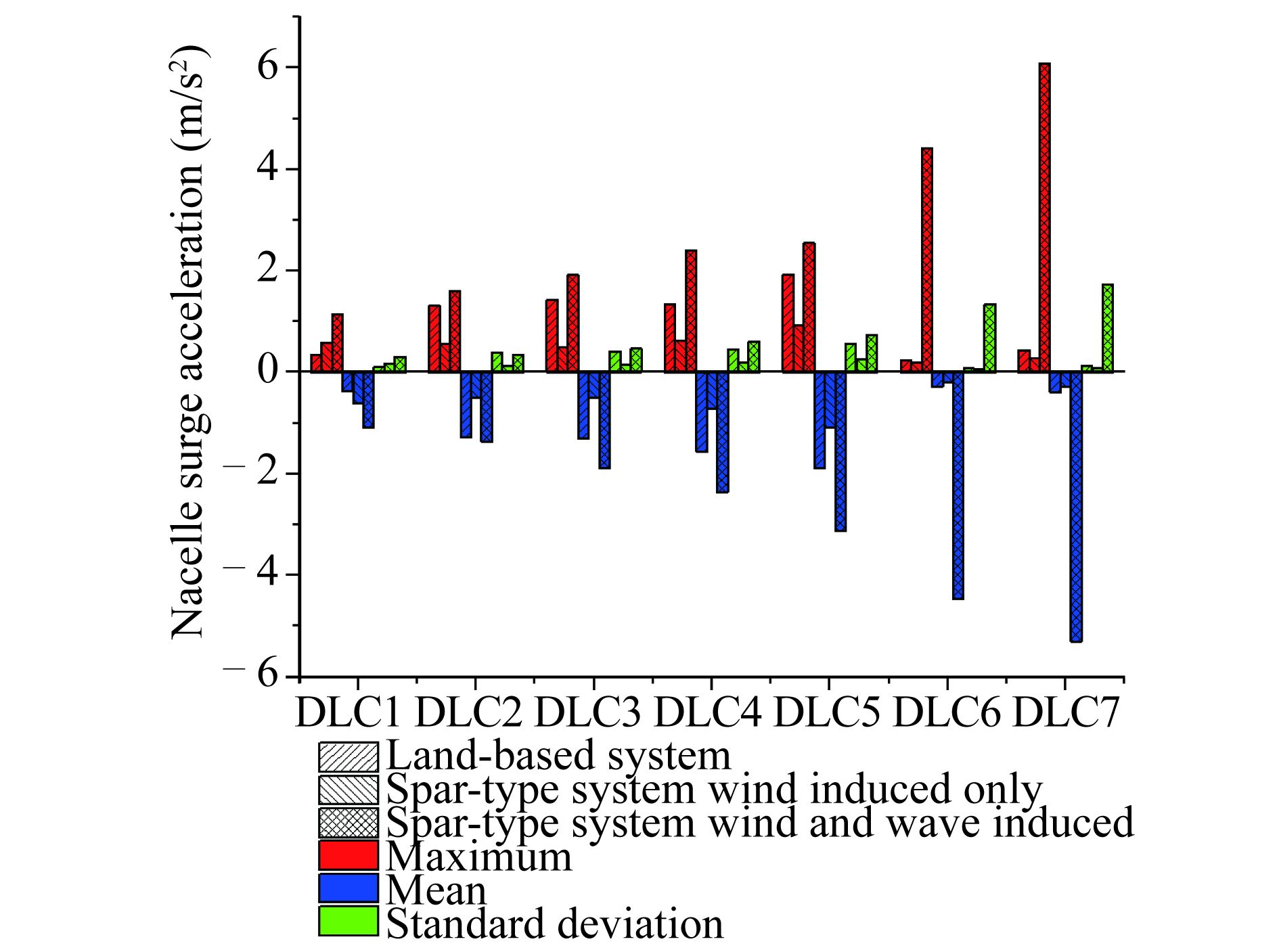
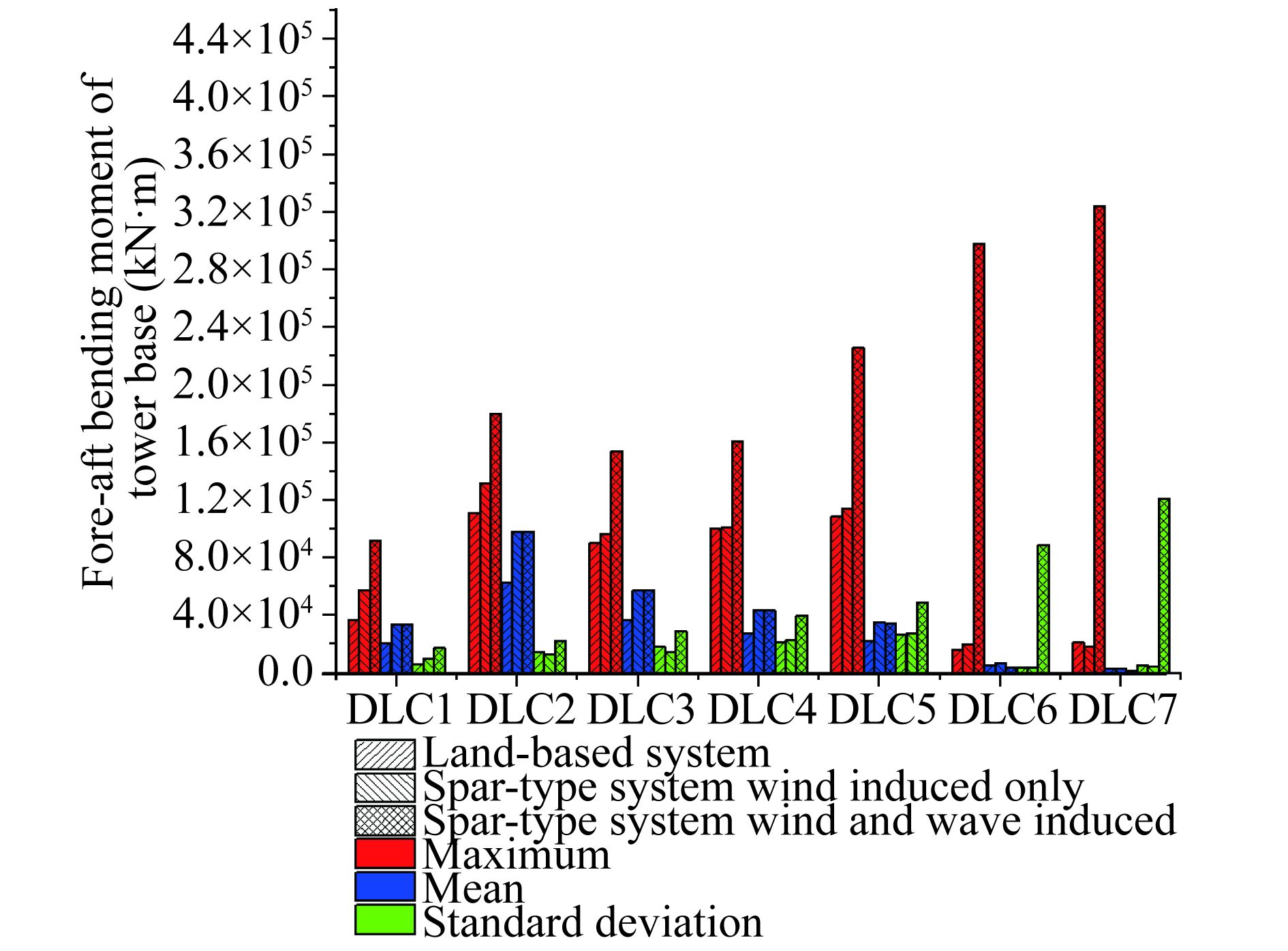
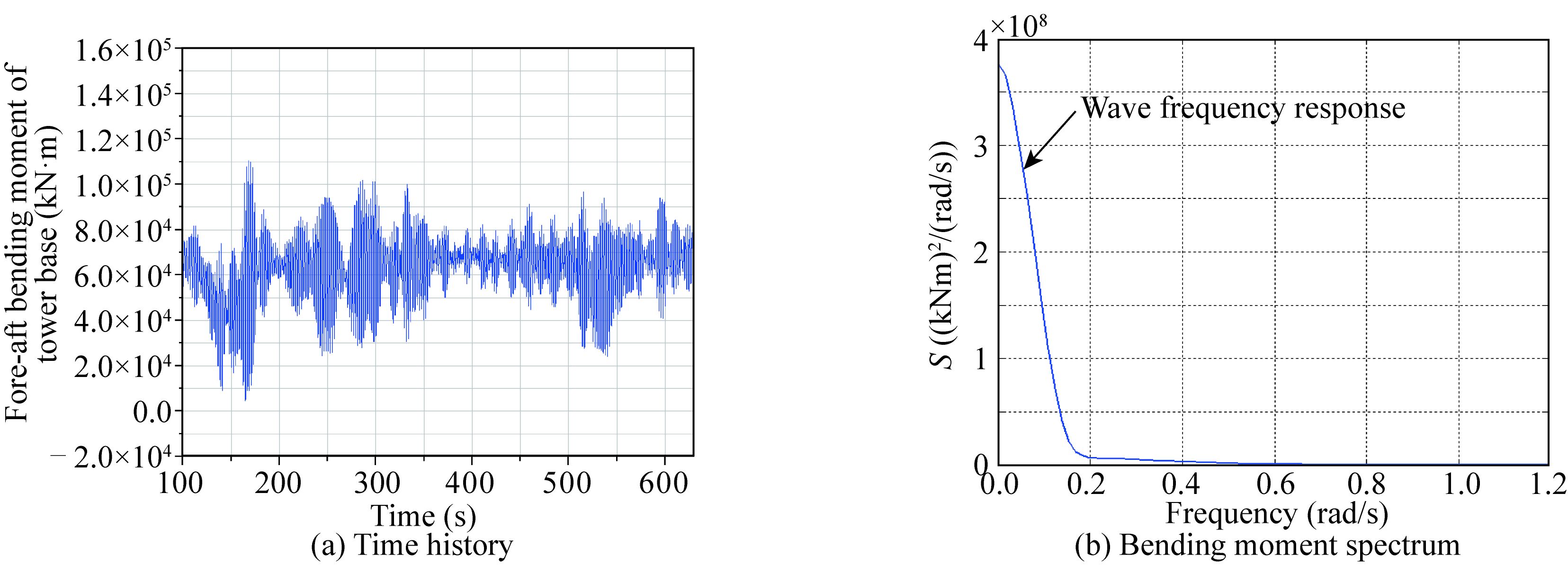
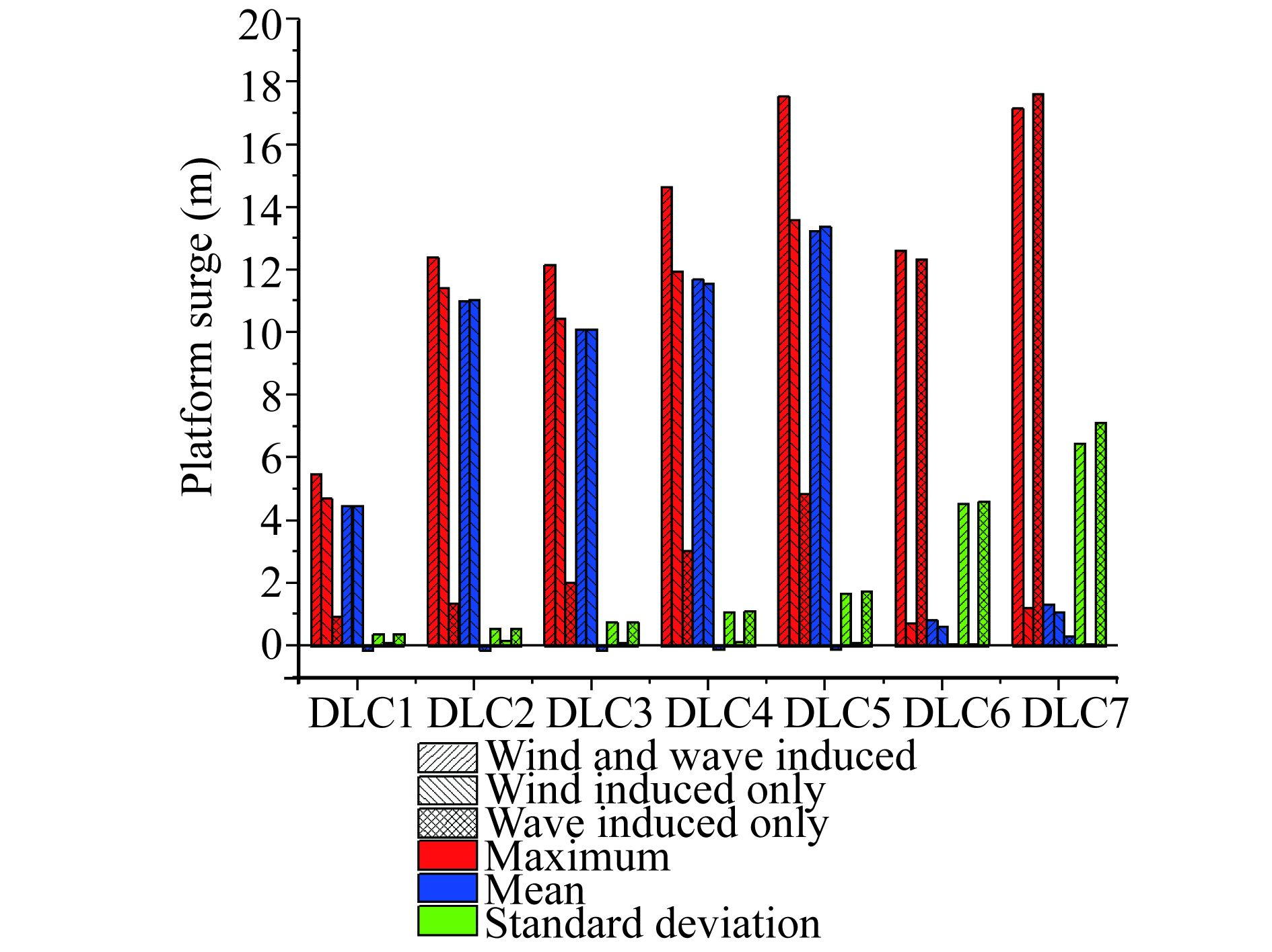
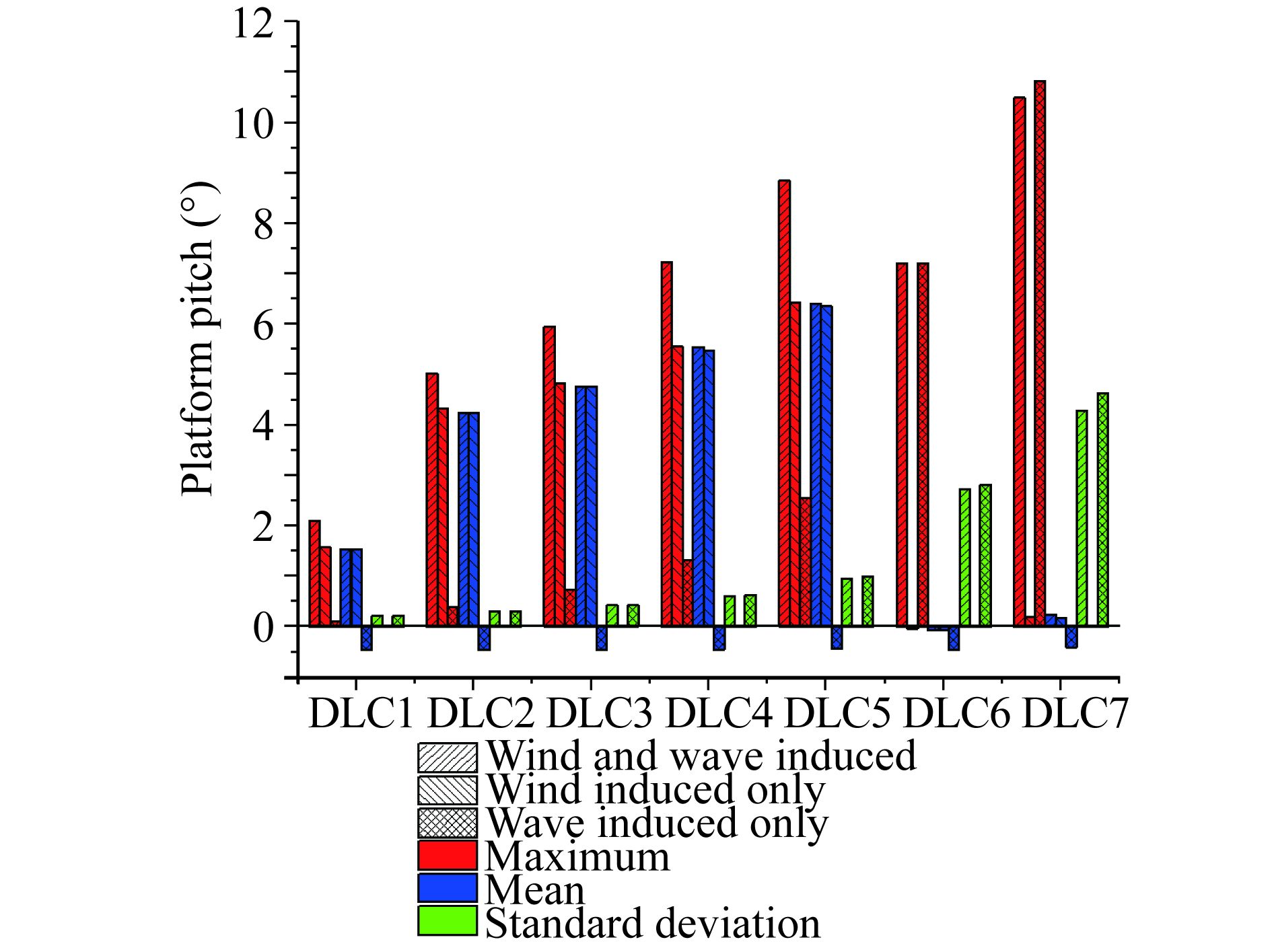
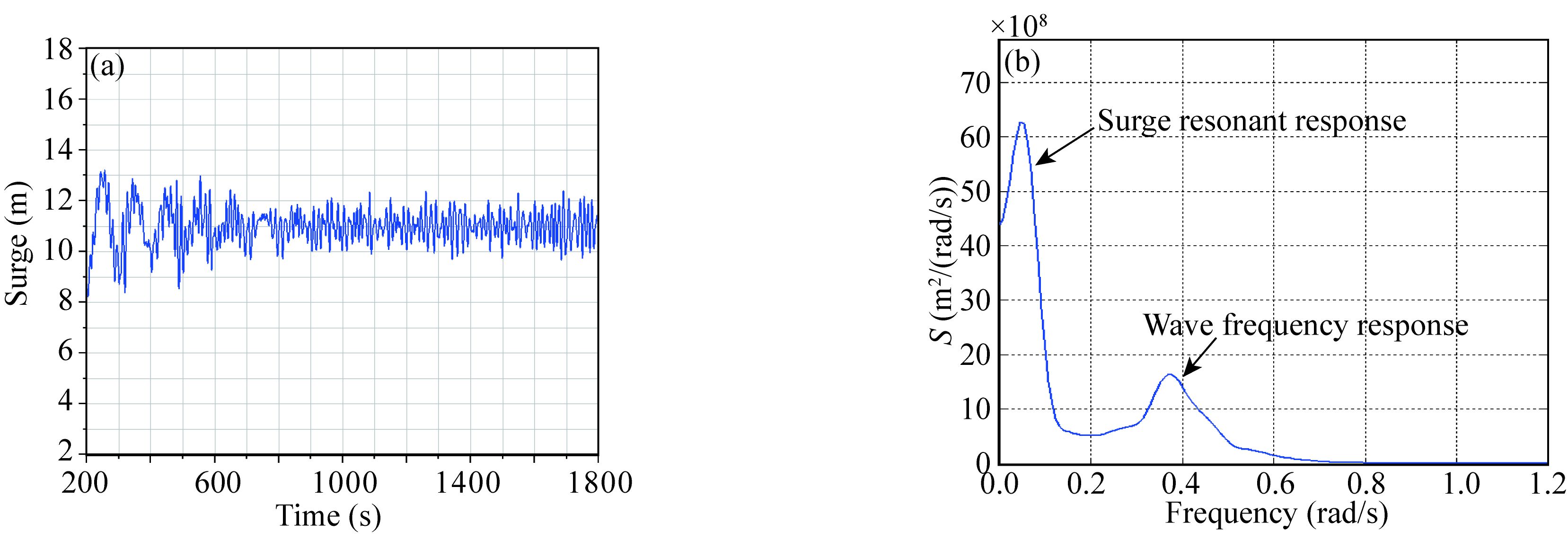
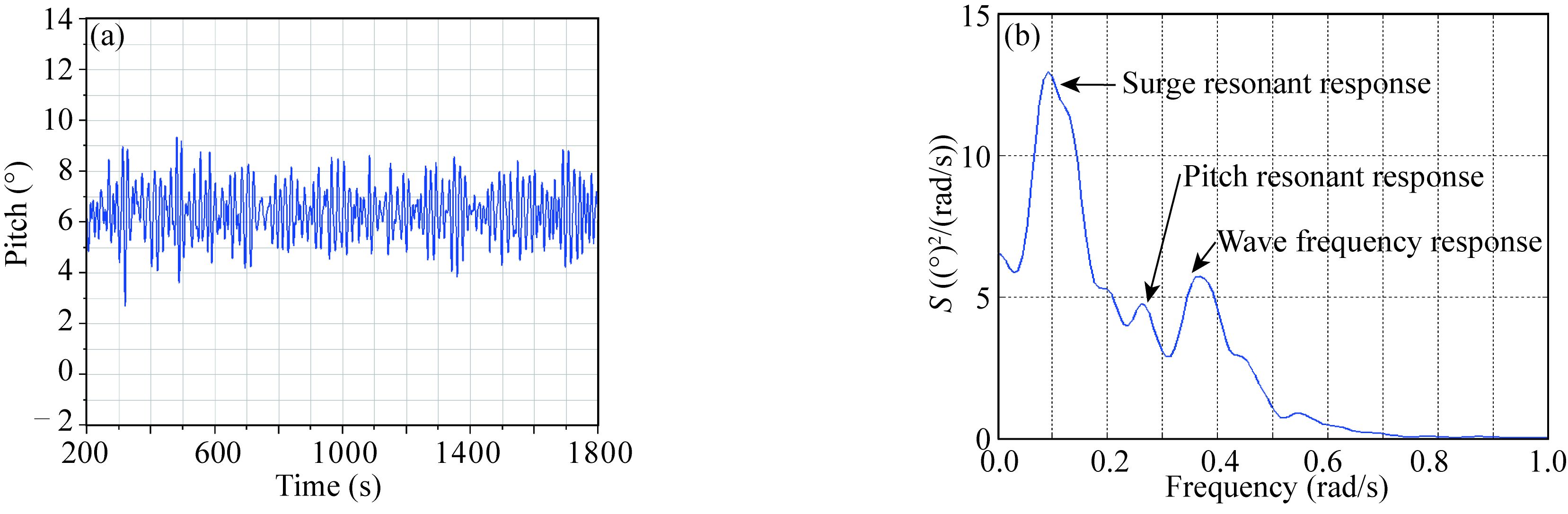
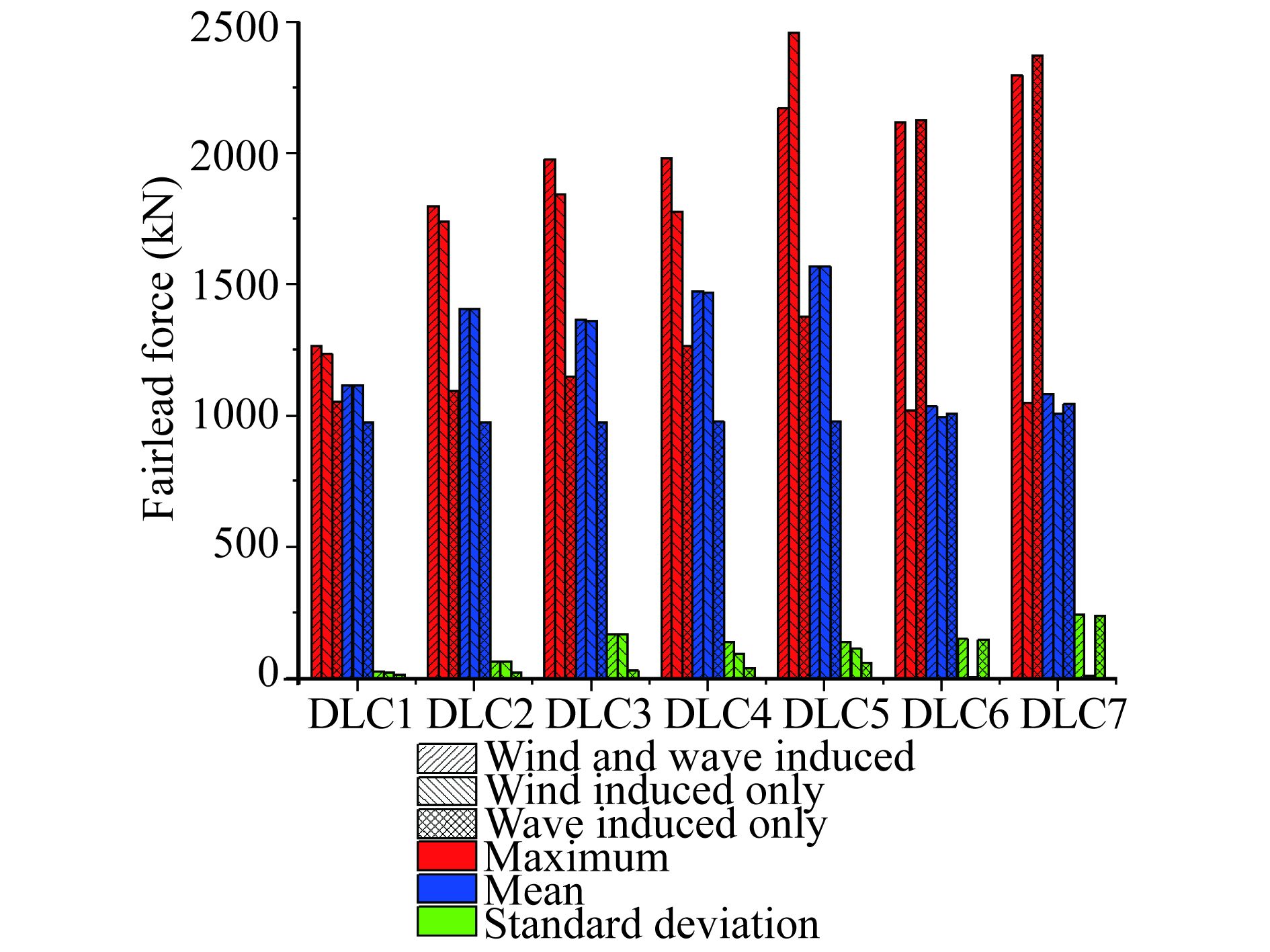
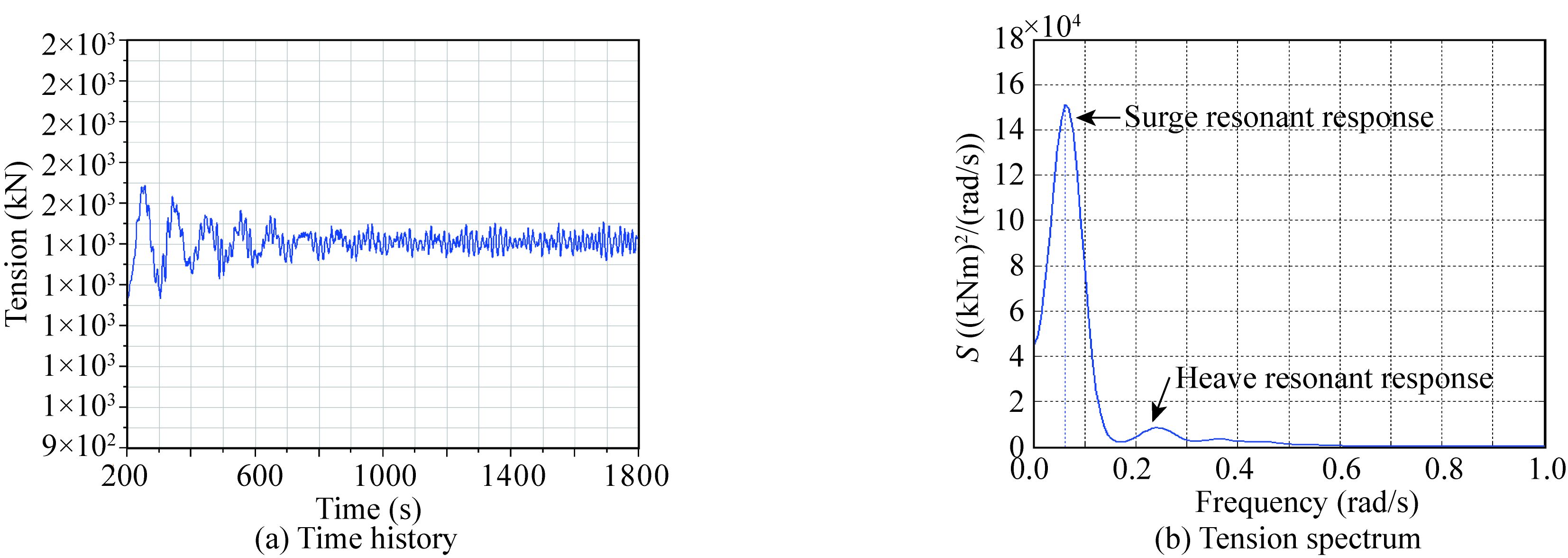
Tower, Spar platform and mooring system are designed in the project based on a given 6-MW wind turbine. Under wind-induced only, wave-induced only and combined wind and wave induced loads, dynamic response is analyzed for a 6-MW Spar-type floating offshore wind turbine (FOWT) under operating conditions and parked conditions respectively. Comparison with a platform-fixed system (land-based system) of a 6-MW wind turbine is carried out as well. Results demonstrate that the maximal out-of-plane deflection of the blade of a Spar-type system is 3.1% larger than that of a land-based system; the maximum response value of the nacelle acceleration is 215% larger for all the designed load cases being considered; the ultimate tower base fore-aft bending moment of the Spar-type system is 92% larger than that of the land-based system in all of the Design Load Cases (DLCs) being considered; the fluctuations of the mooring tension is mainly wave-induced, and the safety factor of the mooring tension is adequate for the 6-MW FOWT. The results can provide relevant modifications to the initial design for the Spar-type system, the detailed design and model basin test of the 6-MW Spar-type system.
Tower, Spar platform and mooring system are designed in the project based on a given 6-MW wind turbine. Under wind-induced only, wave-induced only and combined wind and wave induced loads, dynamic response is analyzed for a 6-MW Spar-type floating offshore wind turbine (FOWT) under operating conditions and parked conditions respectively. Comparison with a platform-fixed system (land-based system) of a 6-MW wind turbine is carried out as well. Results demonstrate that the maximal out-of-plane deflection of the blade of a Spar-type system is 3.1% larger than that of a land-based system; the maximum response value of the nacelle acceleration is 215% larger for all the designed load cases being considered; the ultimate tower base fore-aft bending moment of the Spar-type system is 92% larger than that of the land-based system in all of the Design Load Cases (DLCs) being considered; the fluctuations of the mooring tension is mainly wave-induced, and the safety factor of the mooring tension is adequate for the 6-MW FOWT. The results can provide relevant modifications to the initial design for the Spar-type system, the detailed design and model basin test of the 6-MW Spar-type system.


2017, 31(5): 578-588.
doi: 10.1007/s13344-017-0066-6
Abstract:
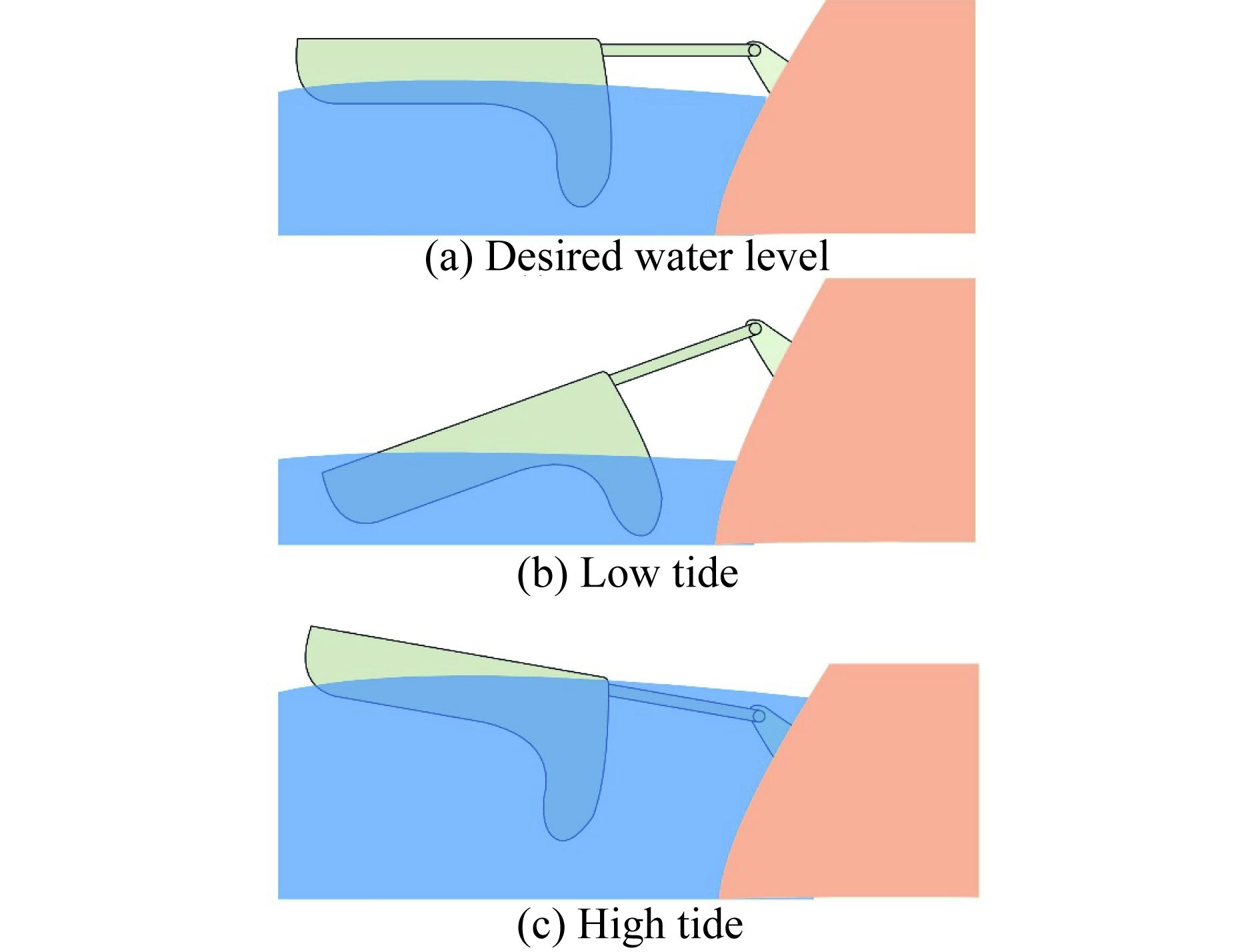
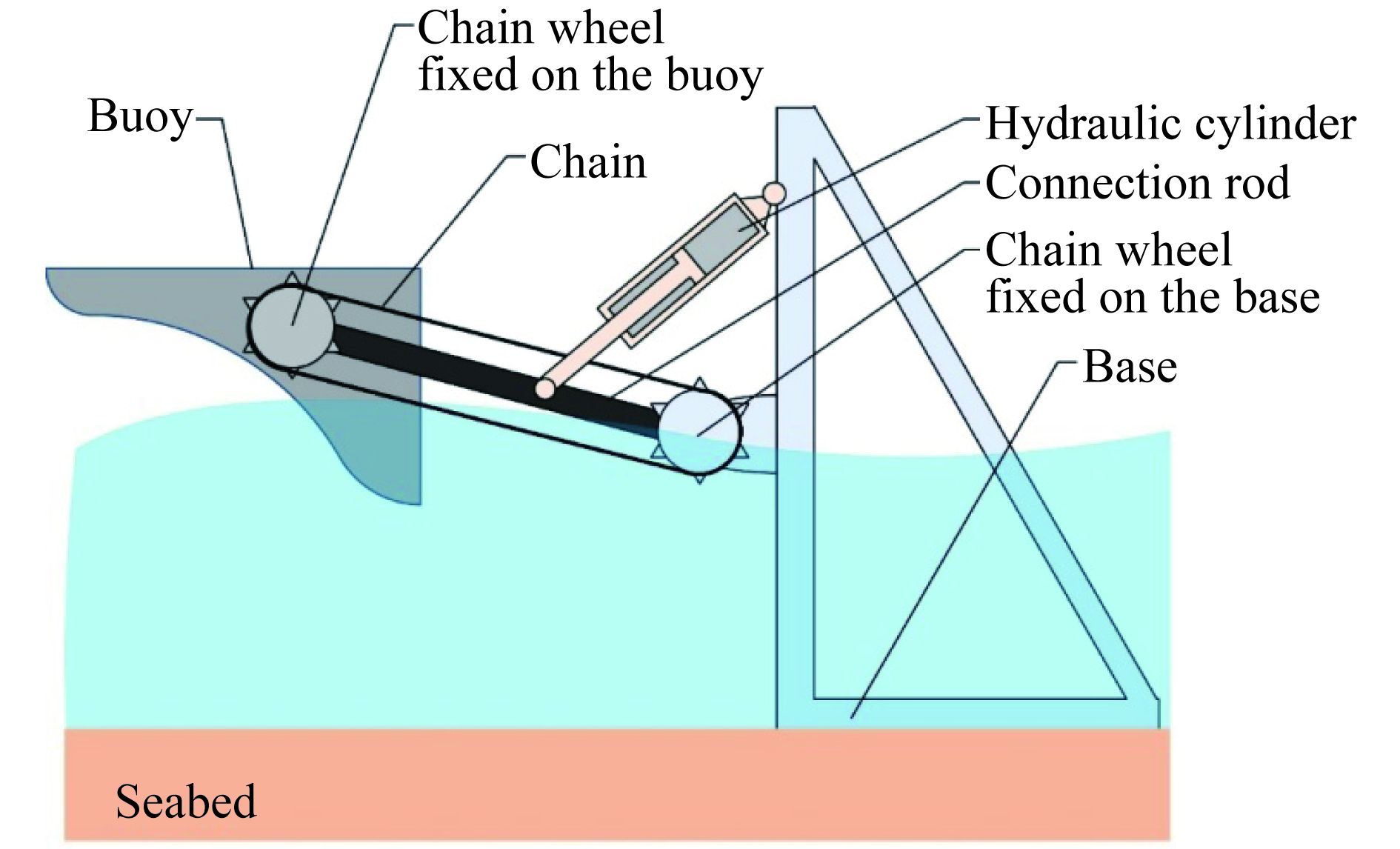
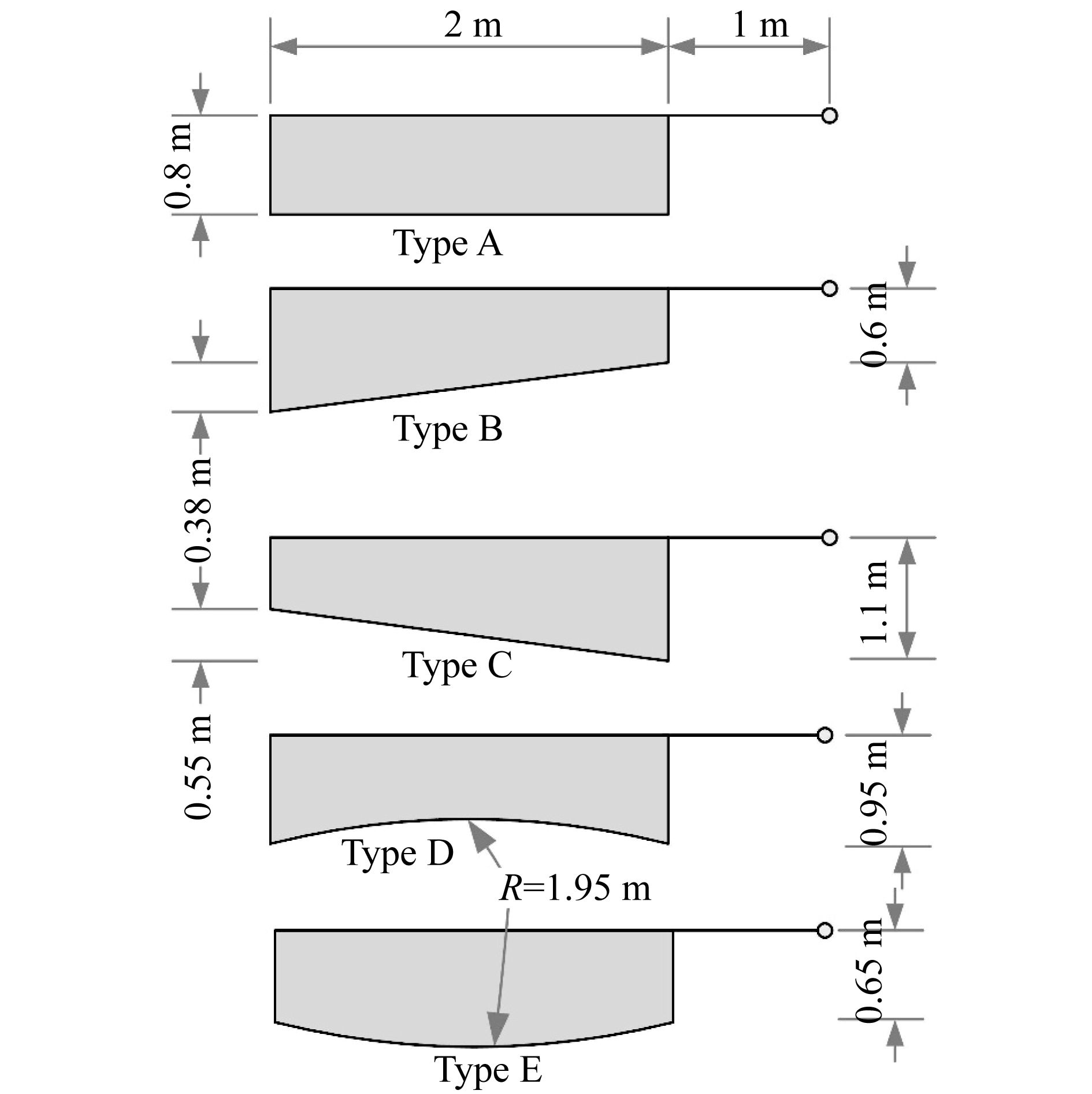
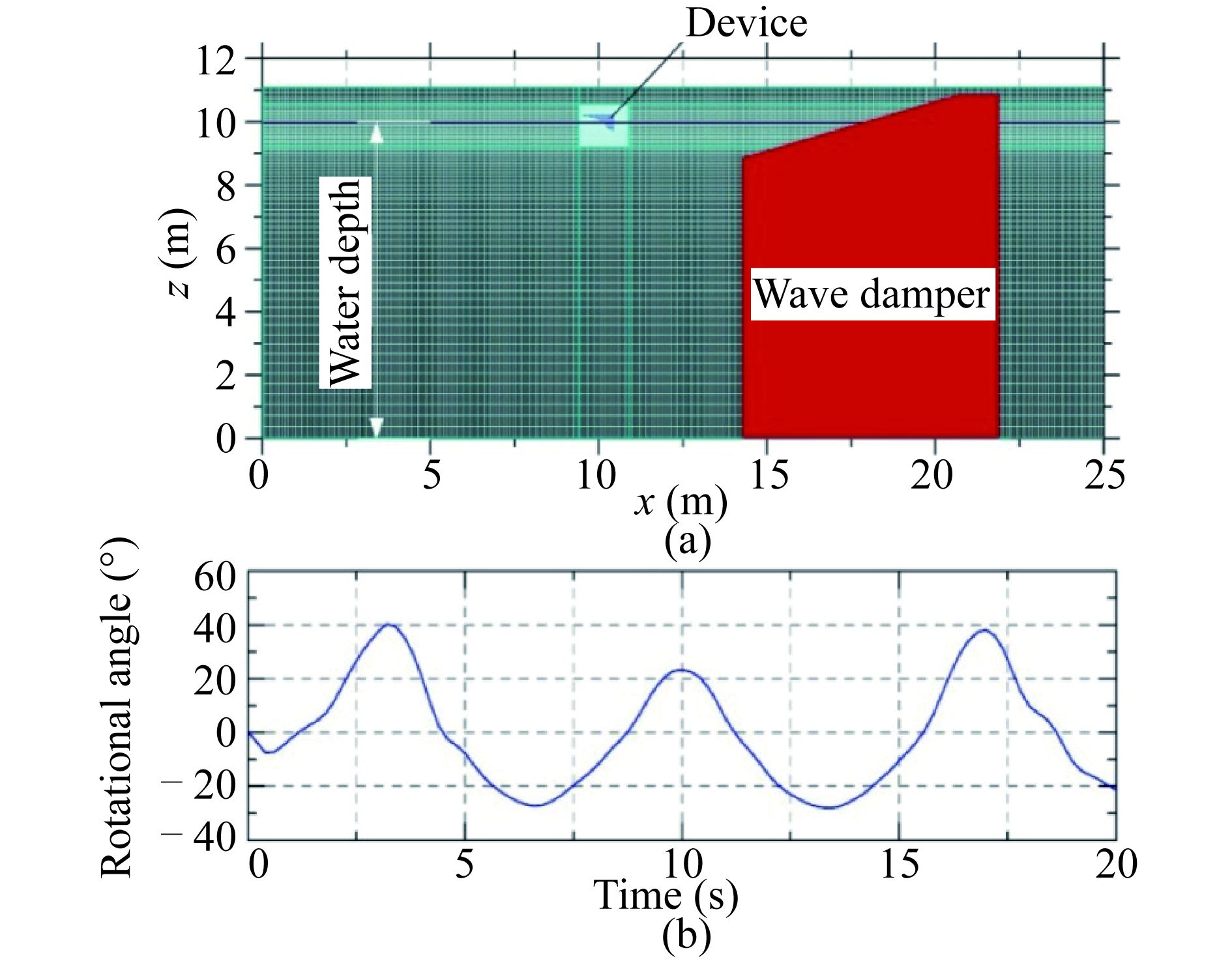
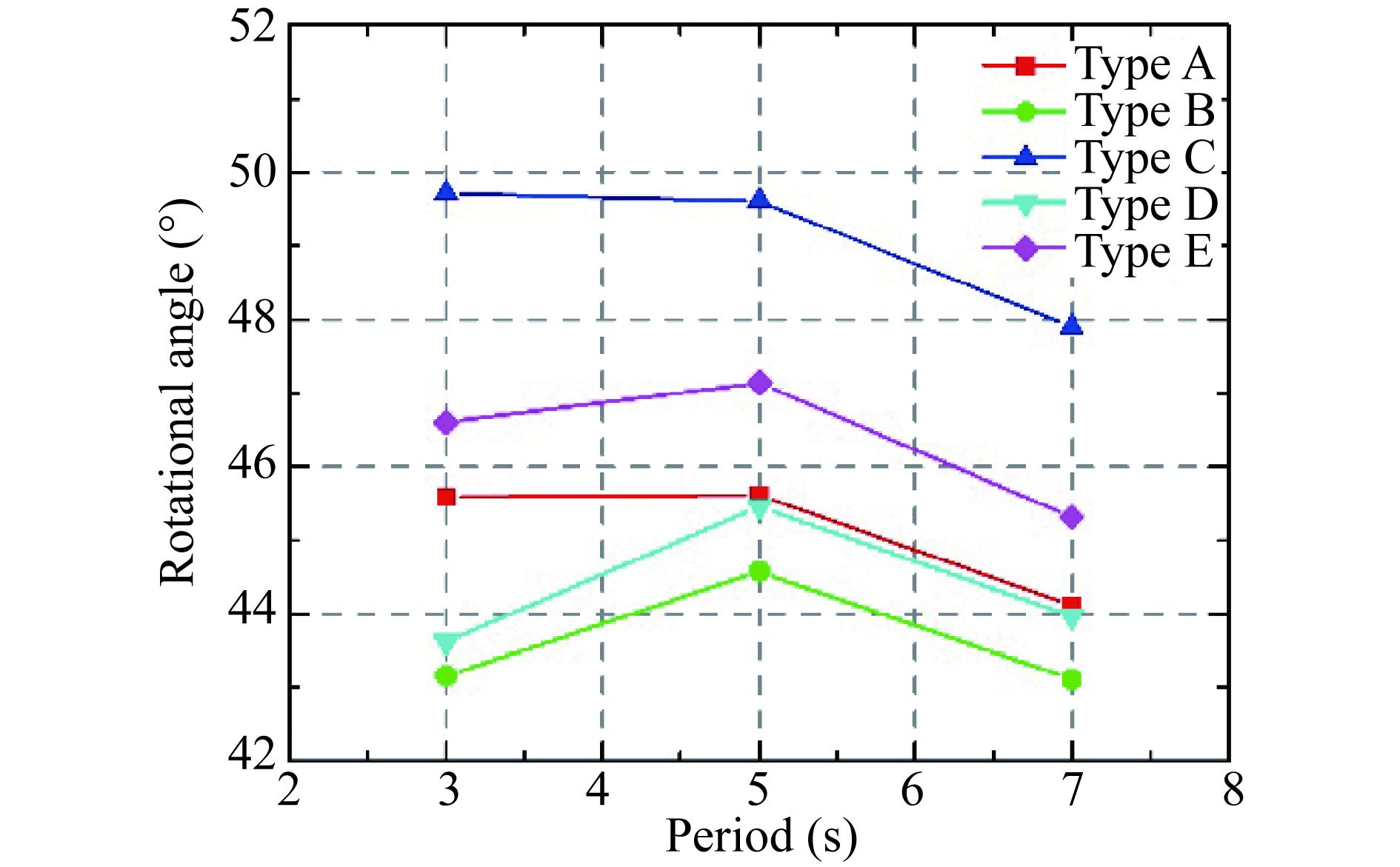
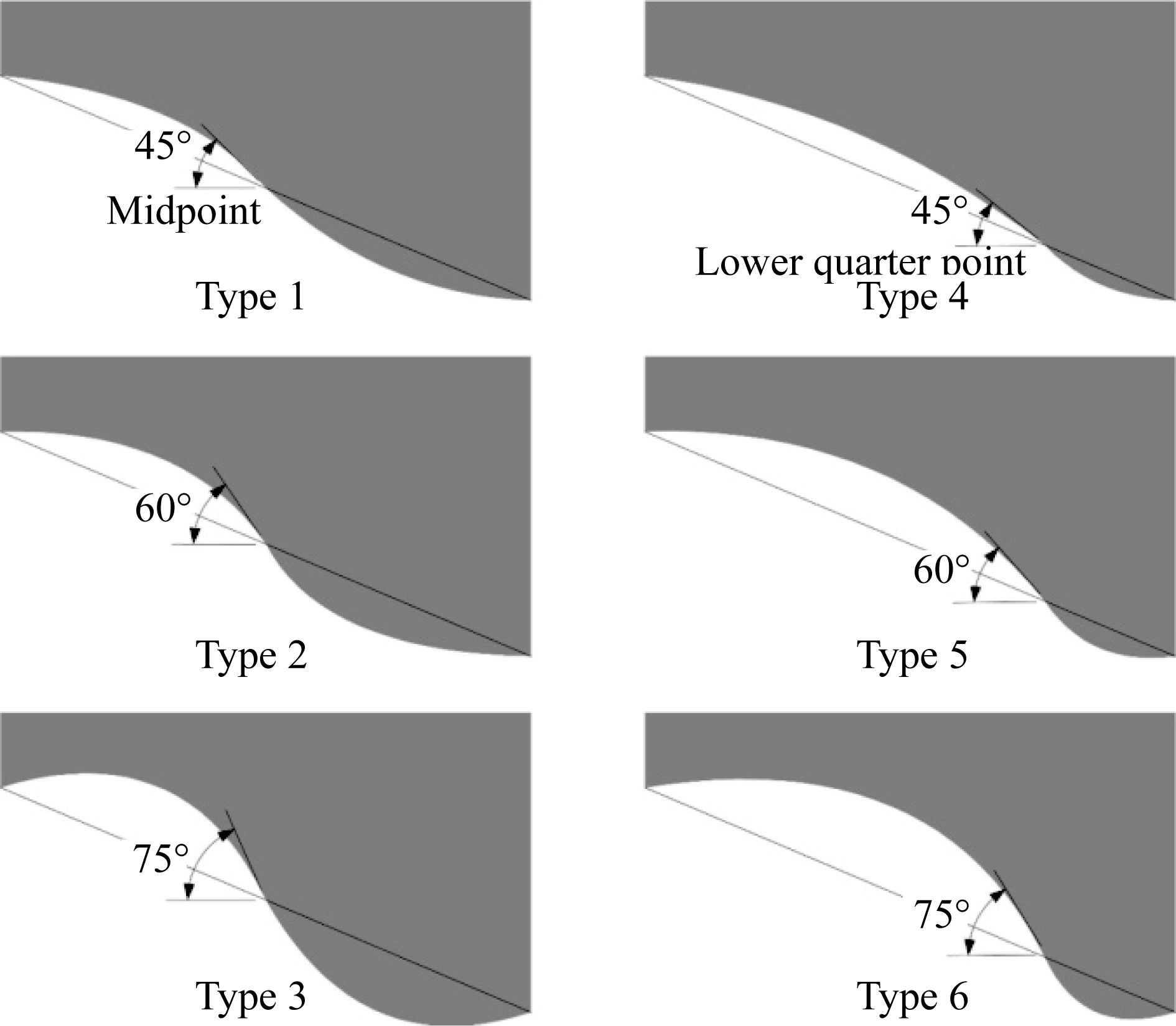
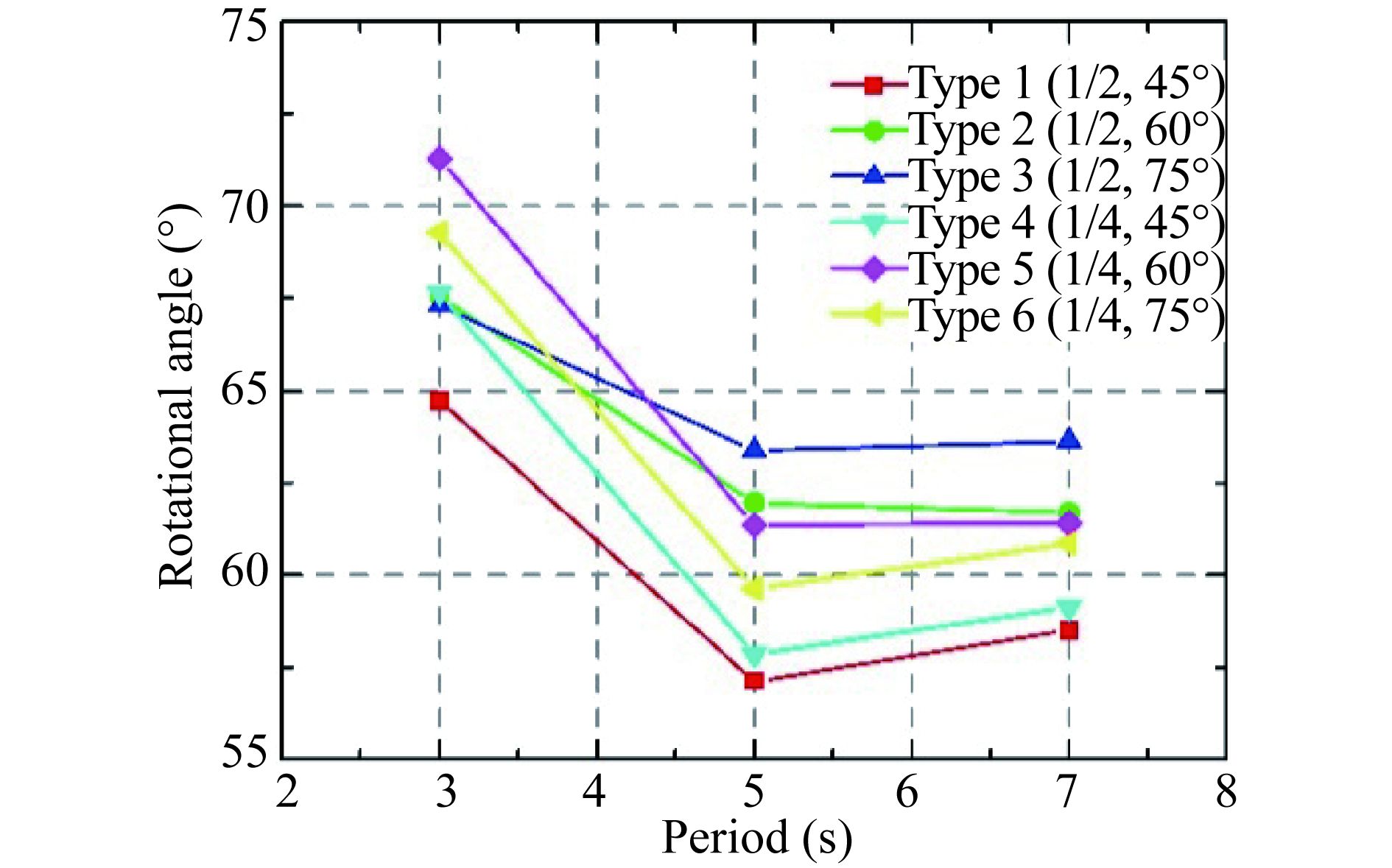
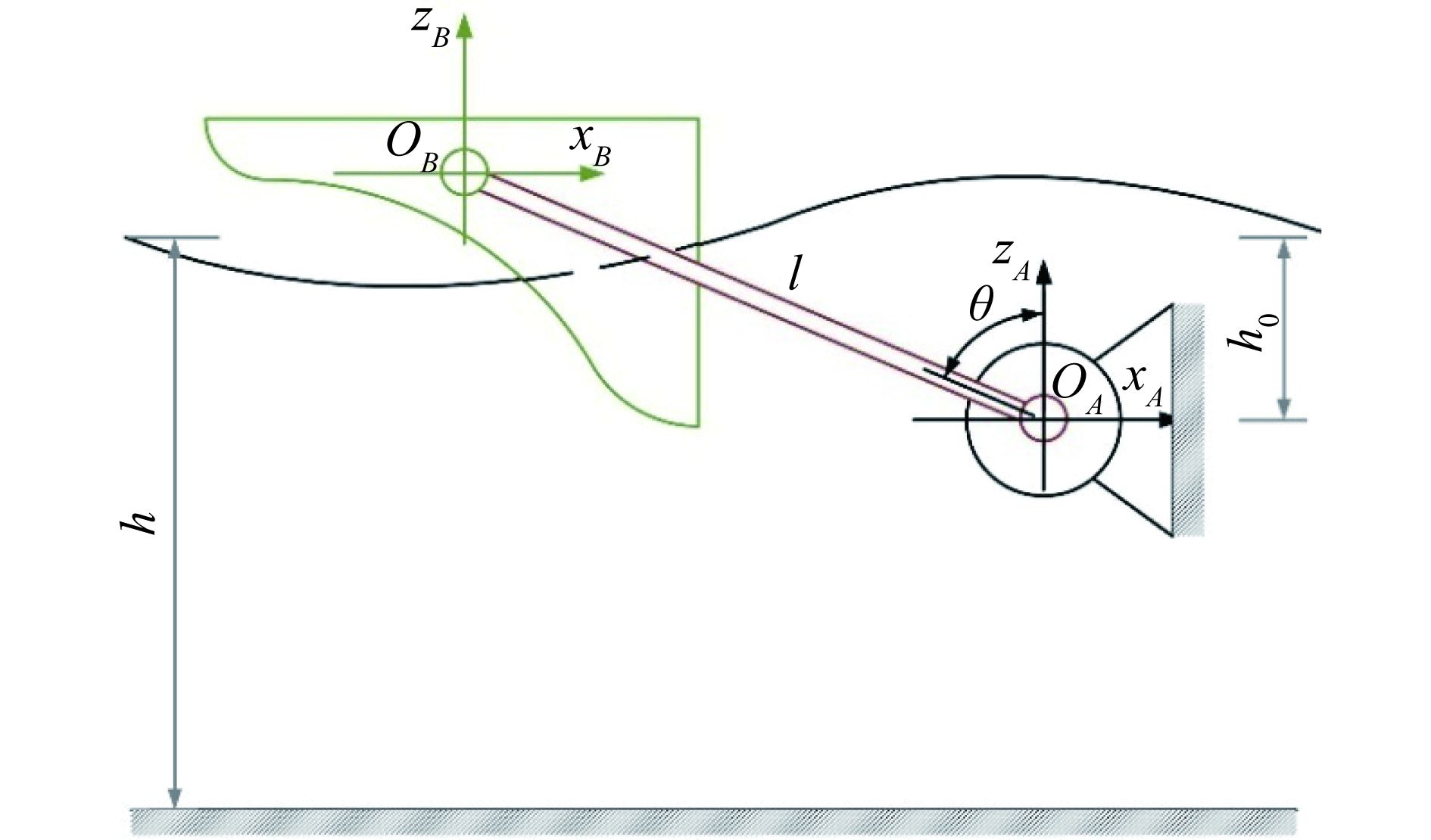
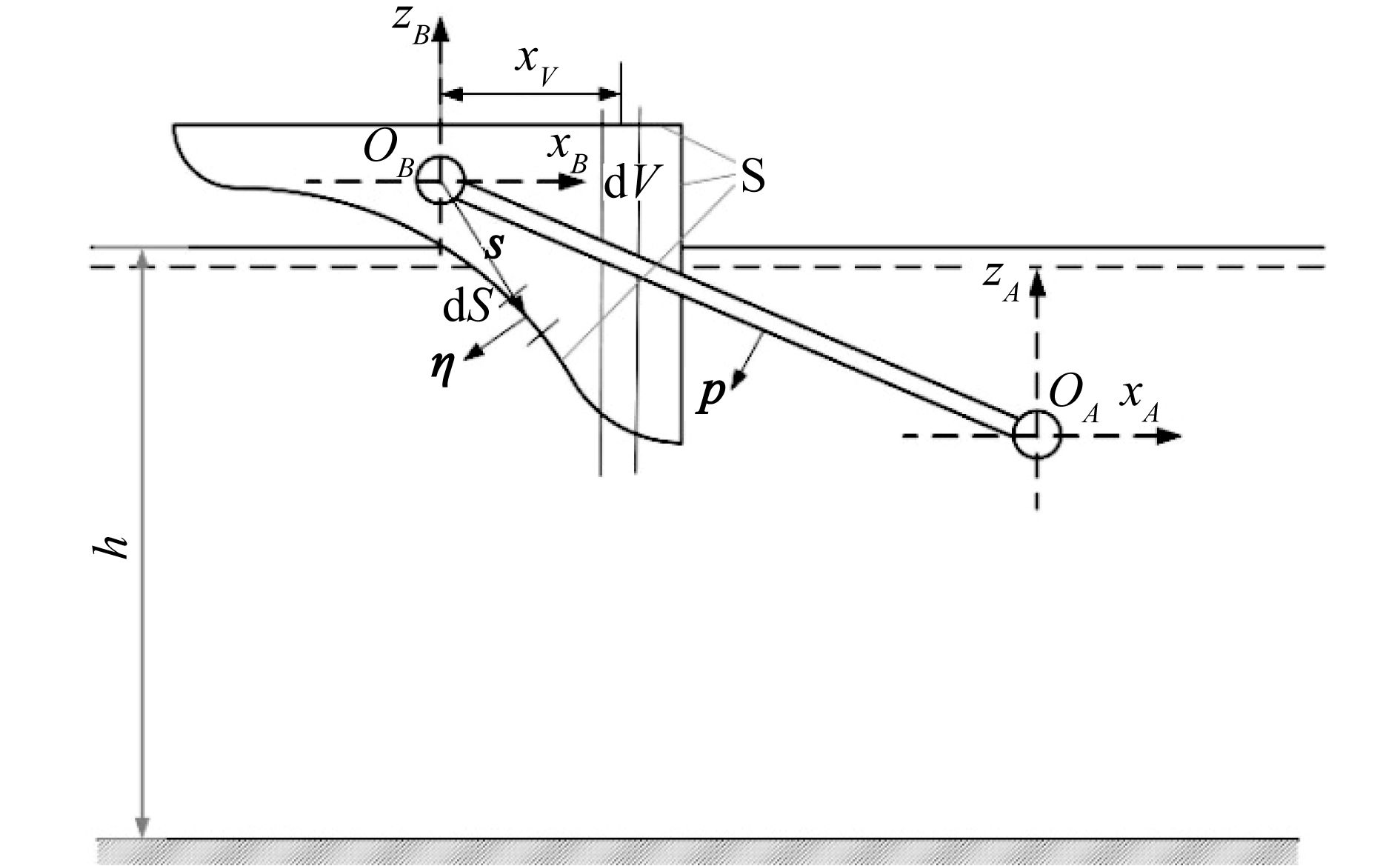
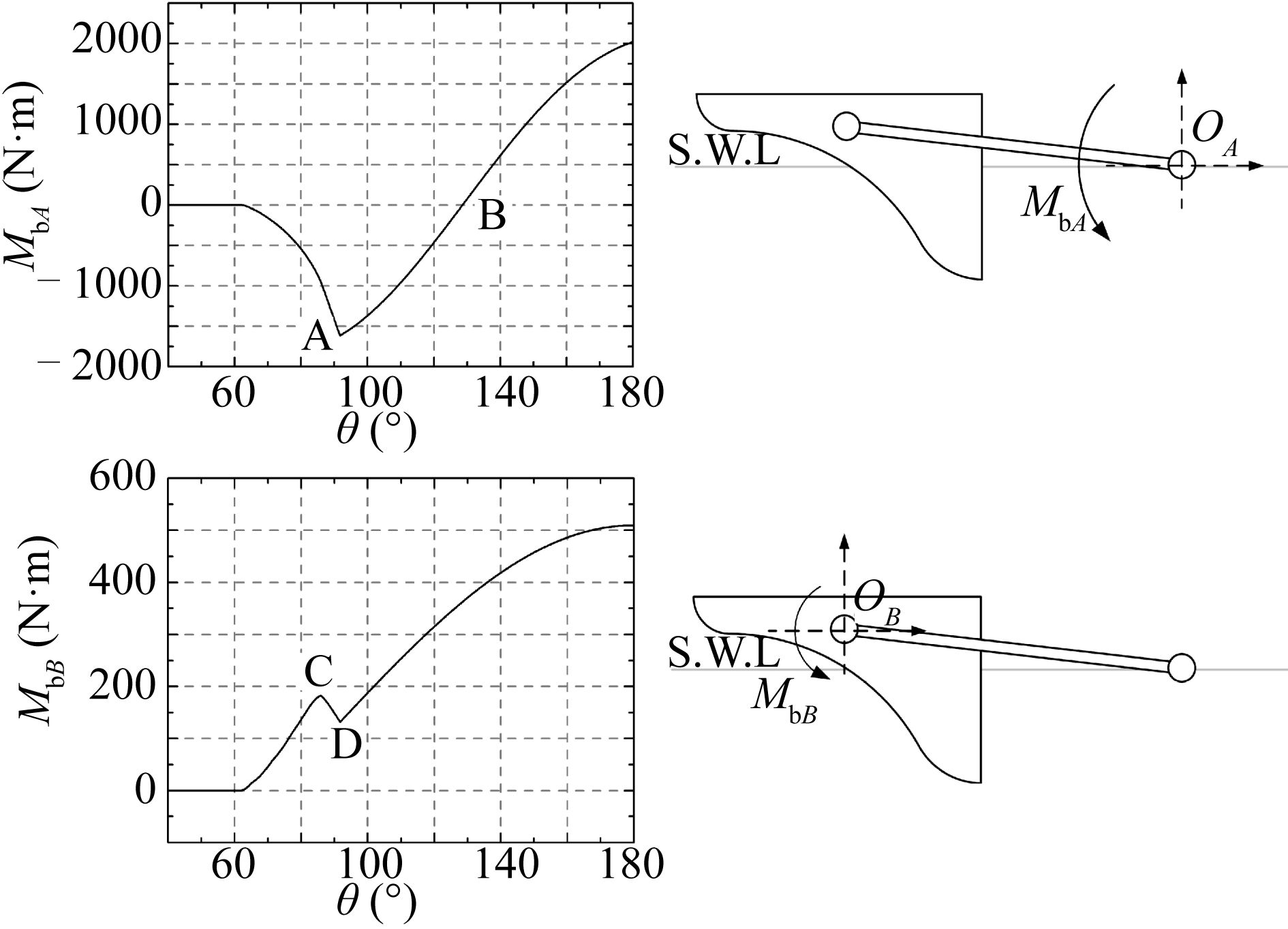
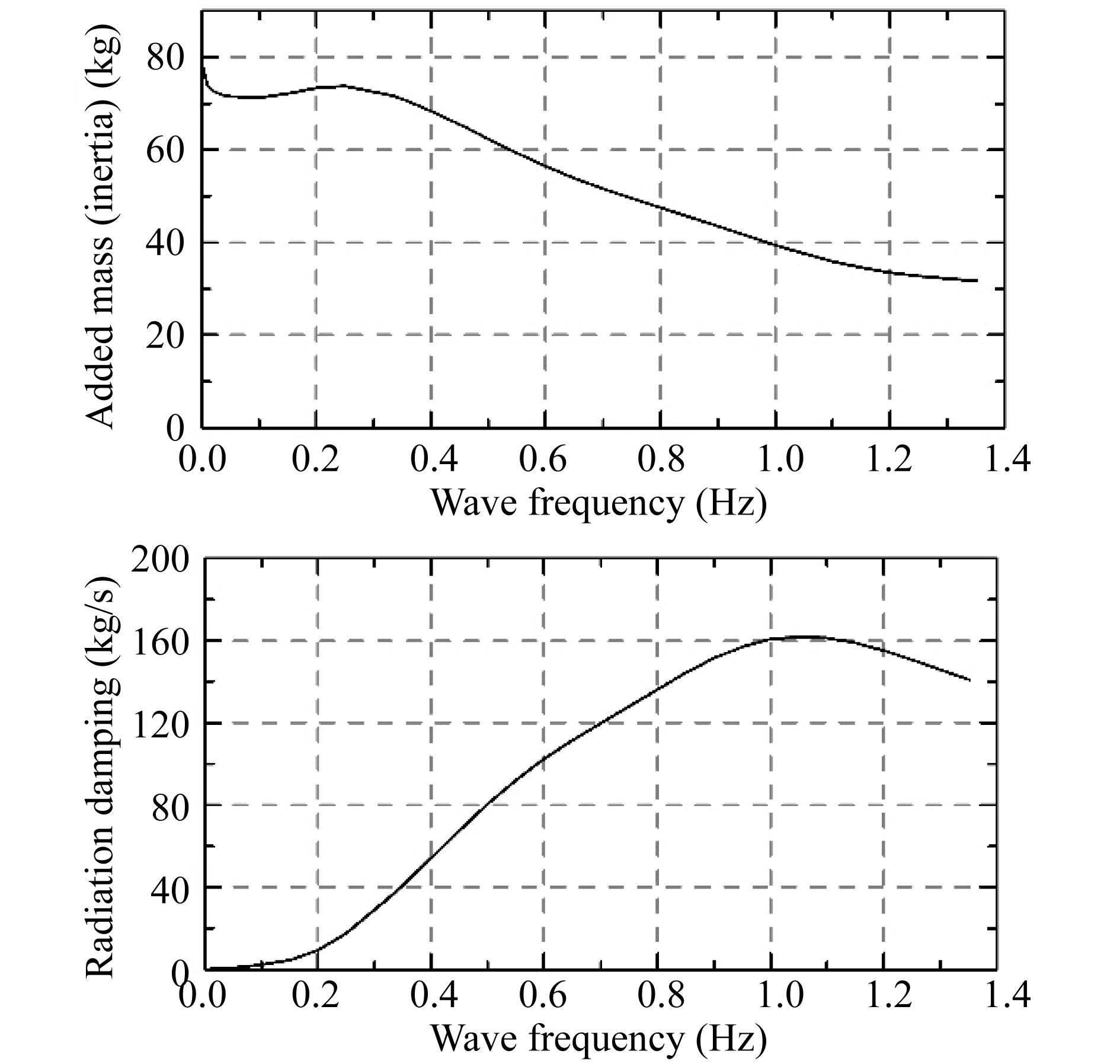
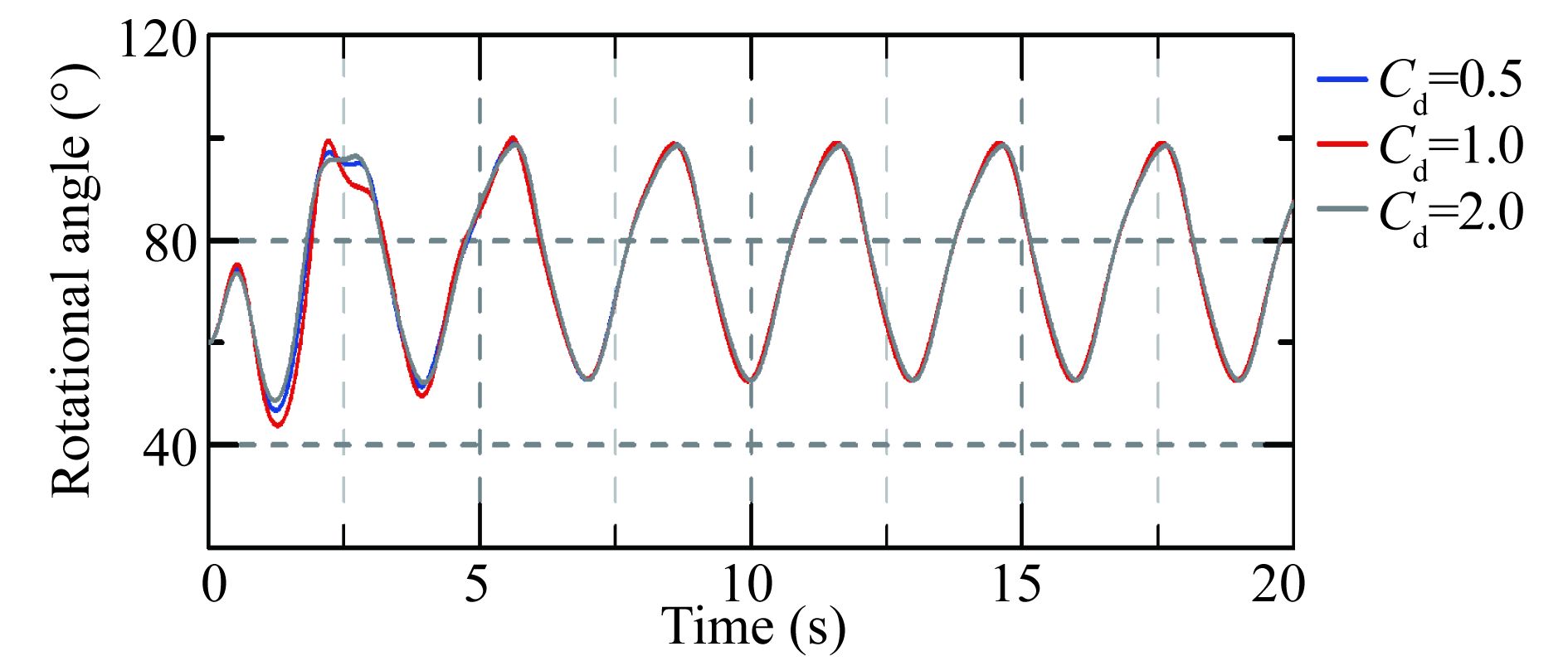
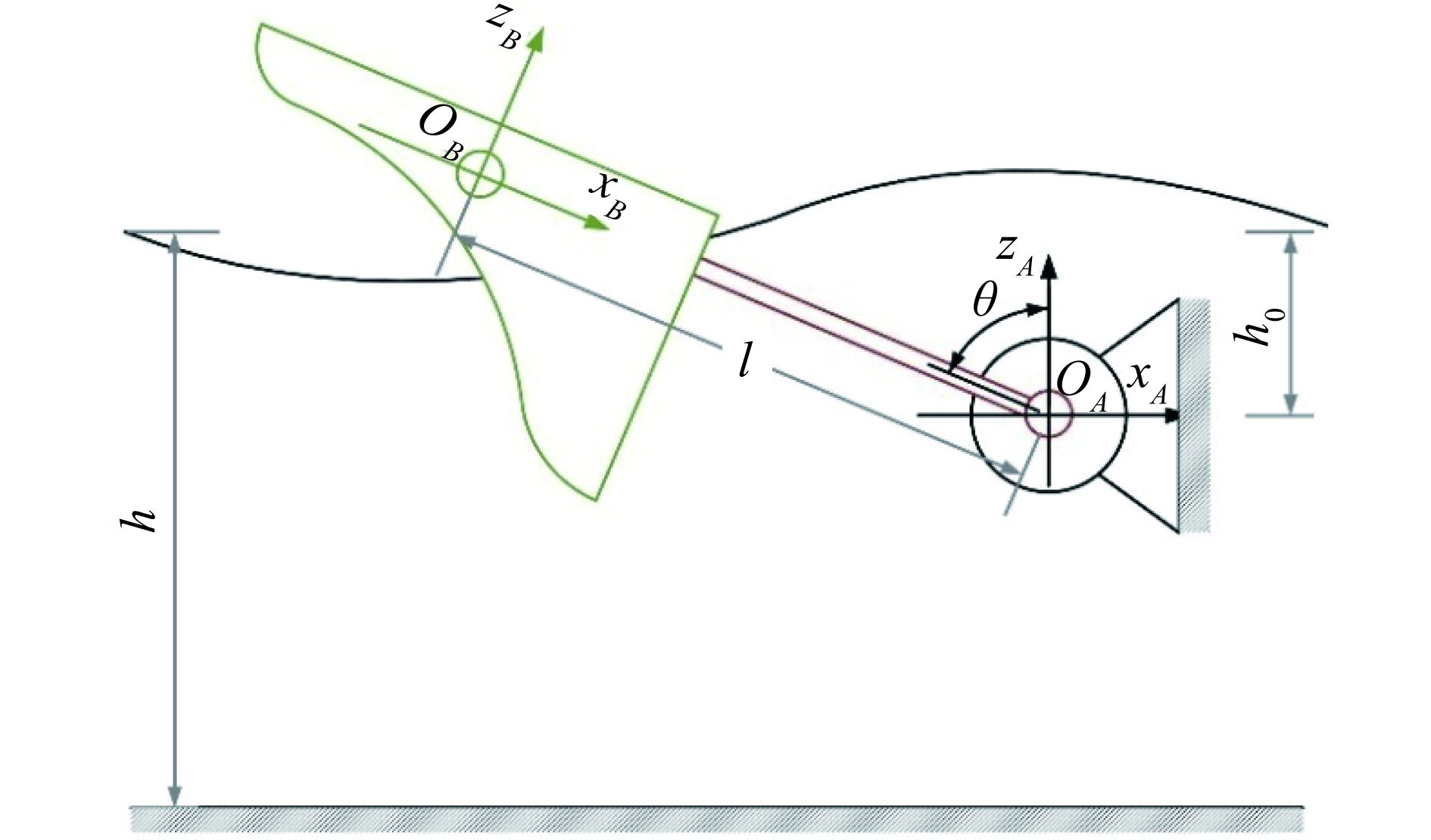
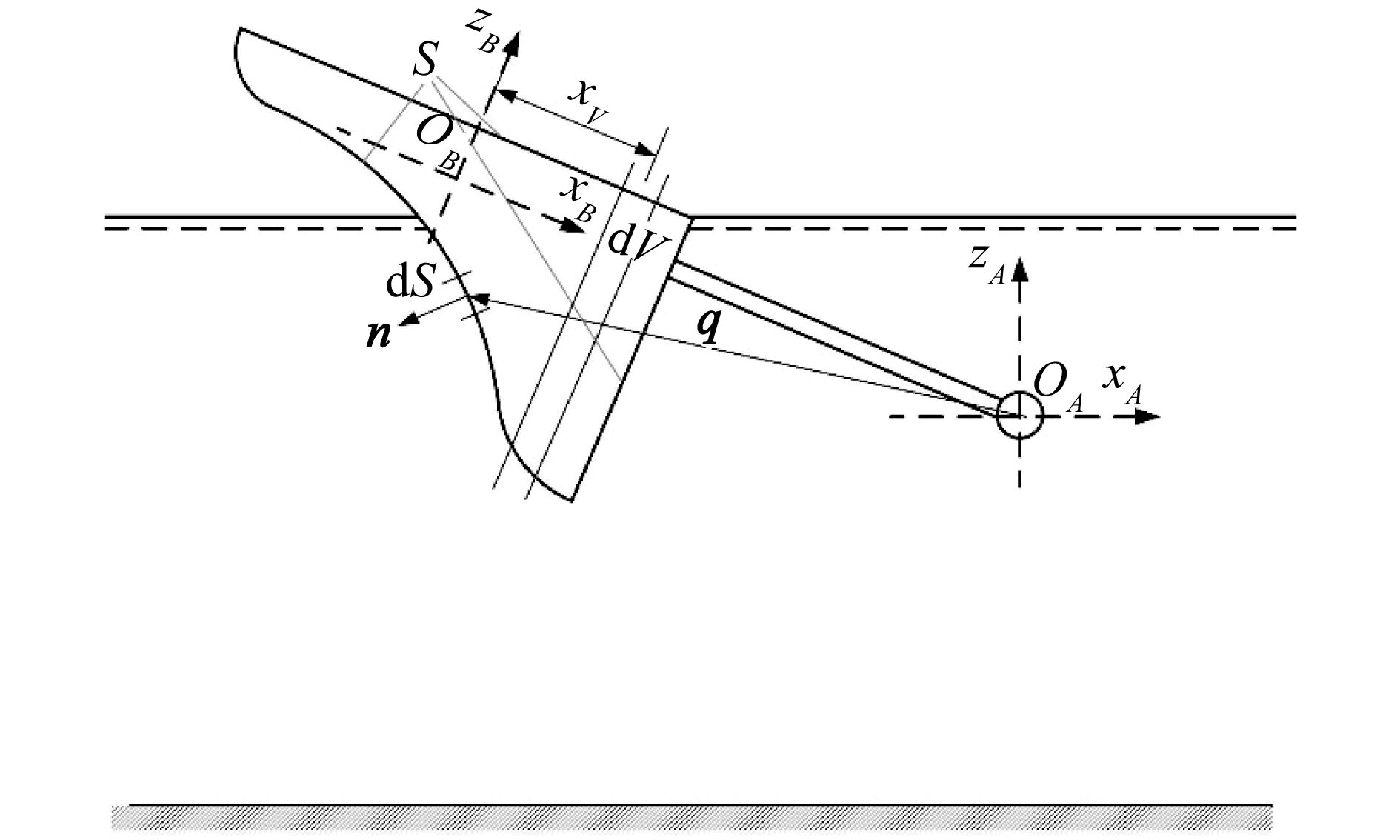
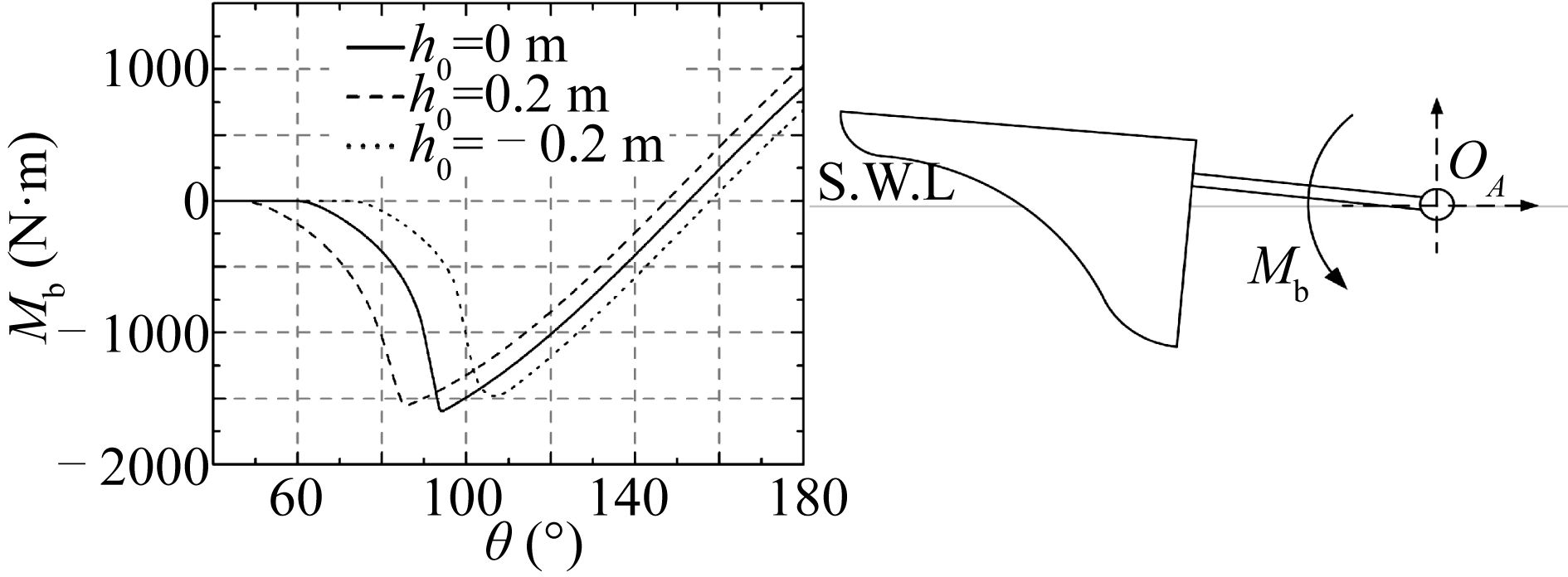
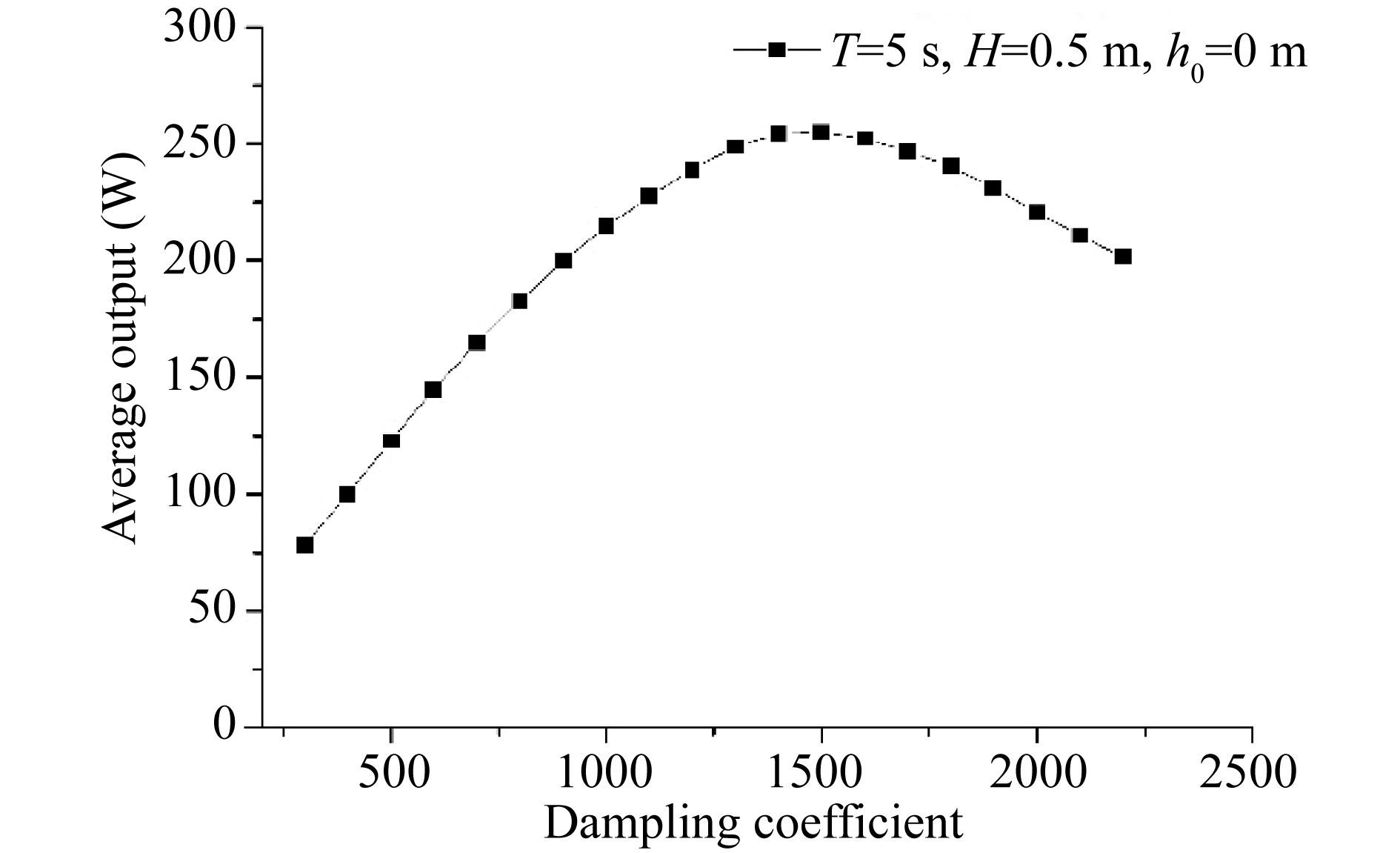
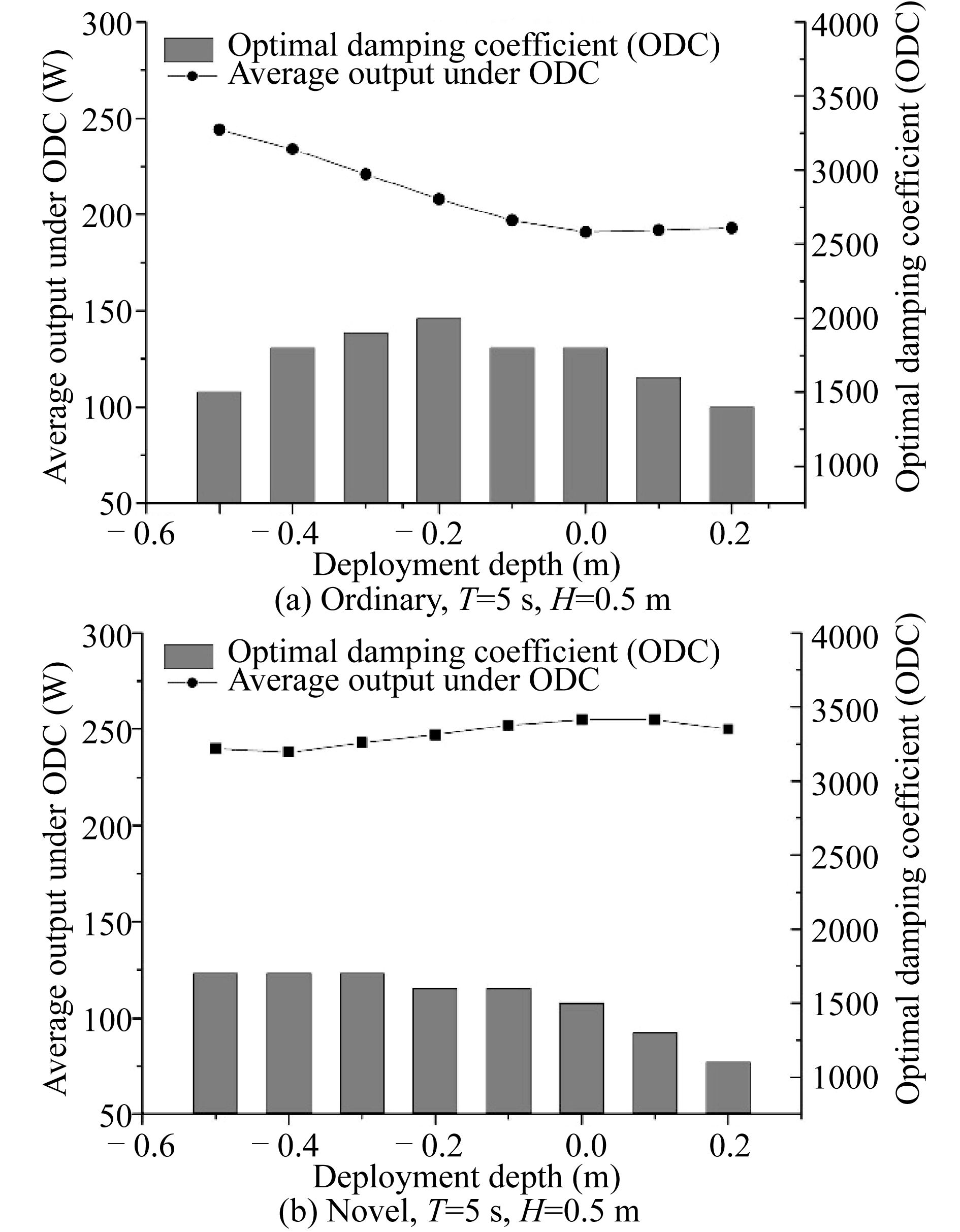
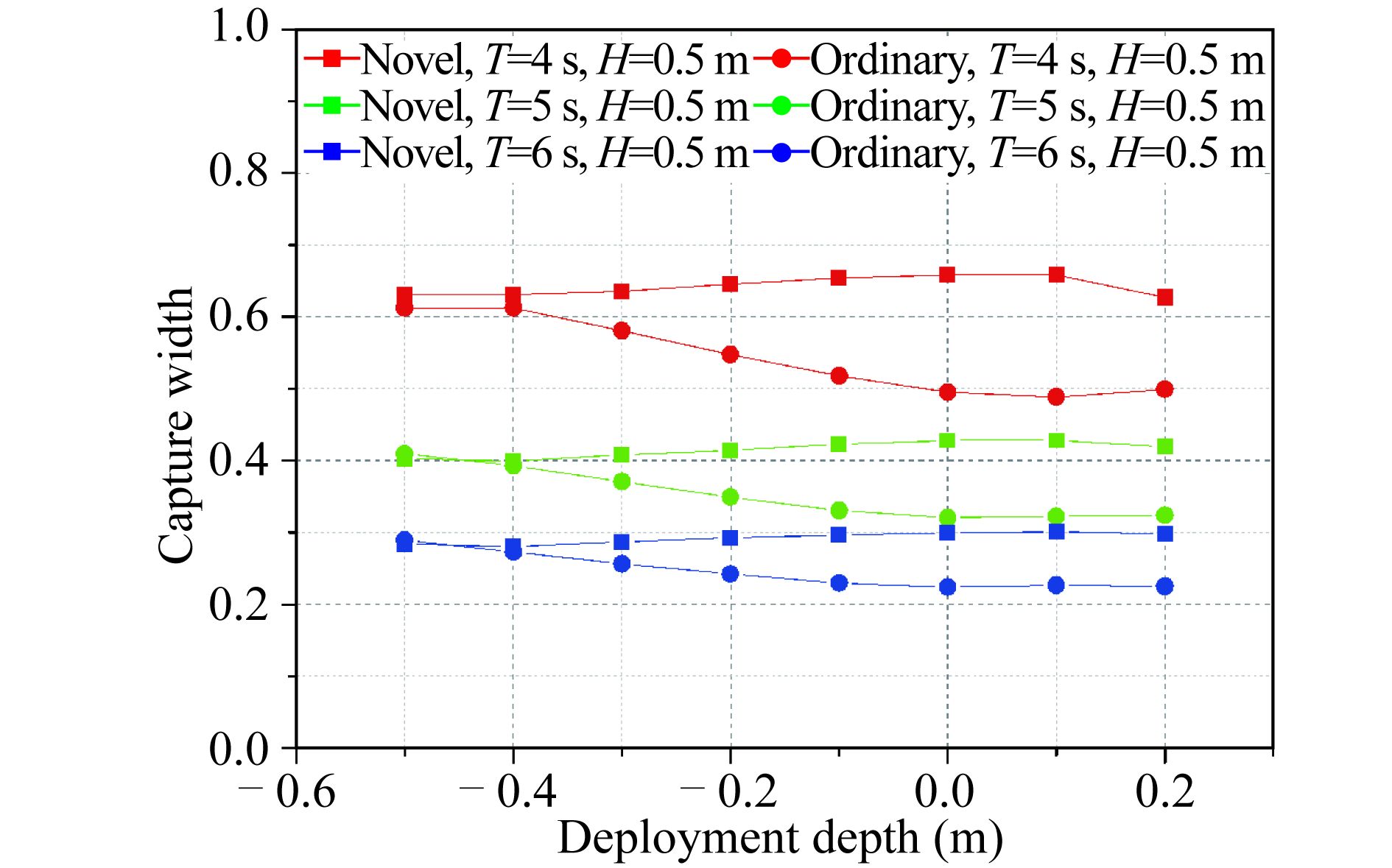
A novel floating pendulum wave energy converter (WEC) with the ability of tide adaptation is designed and presented in this paper. Aiming to a high efficiency, the buoy’s hydrodynamic shape is optimized by enumeration and comparison. Furthermore, in order to keep the buoy’s well-designed leading edge always facing the incoming wave straightly, a novel transmission mechanism is then adopted, which is called the tidal adaptation mechanism in this paper. Time domain numerical models of a floating pendulum WEC with or without tide adaptation mechanism are built to compare their performance on various water levels. When comparing these two WECs in terms of their average output based on the linear passive control strategy, the output power of WEC with the tide adaptation mechanism is much steadier with the change of the water level and always larger than that without the tide adaptation mechanism.
A novel floating pendulum wave energy converter (WEC) with the ability of tide adaptation is designed and presented in this paper. Aiming to a high efficiency, the buoy’s hydrodynamic shape is optimized by enumeration and comparison. Furthermore, in order to keep the buoy’s well-designed leading edge always facing the incoming wave straightly, a novel transmission mechanism is then adopted, which is called the tidal adaptation mechanism in this paper. Time domain numerical models of a floating pendulum WEC with or without tide adaptation mechanism are built to compare their performance on various water levels. When comparing these two WECs in terms of their average output based on the linear passive control strategy, the output power of WEC with the tide adaptation mechanism is much steadier with the change of the water level and always larger than that without the tide adaptation mechanism.

2017, 31(5): 589-597.
doi: 10.1007/s13344-017-0068-4
Abstract:
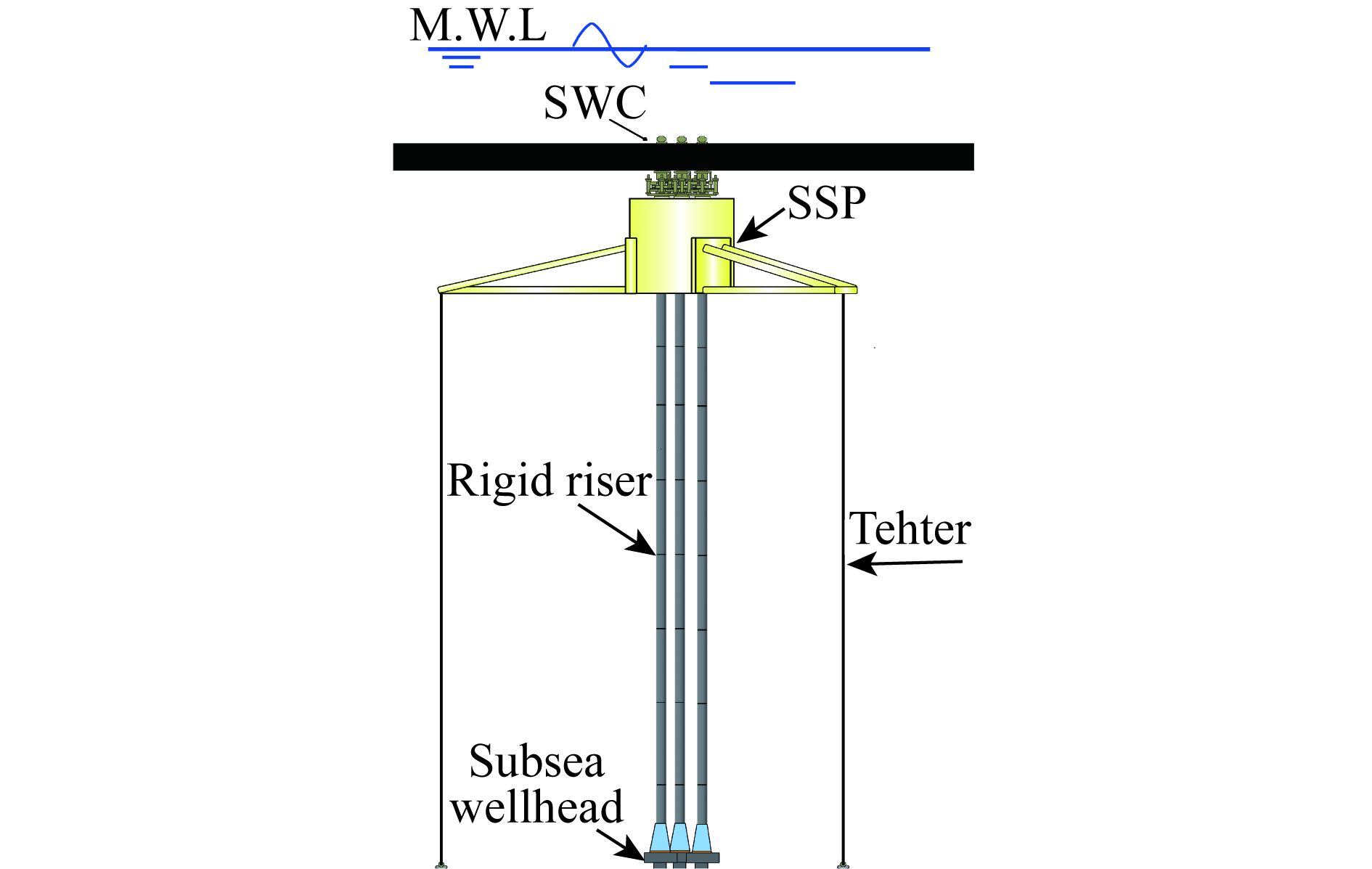
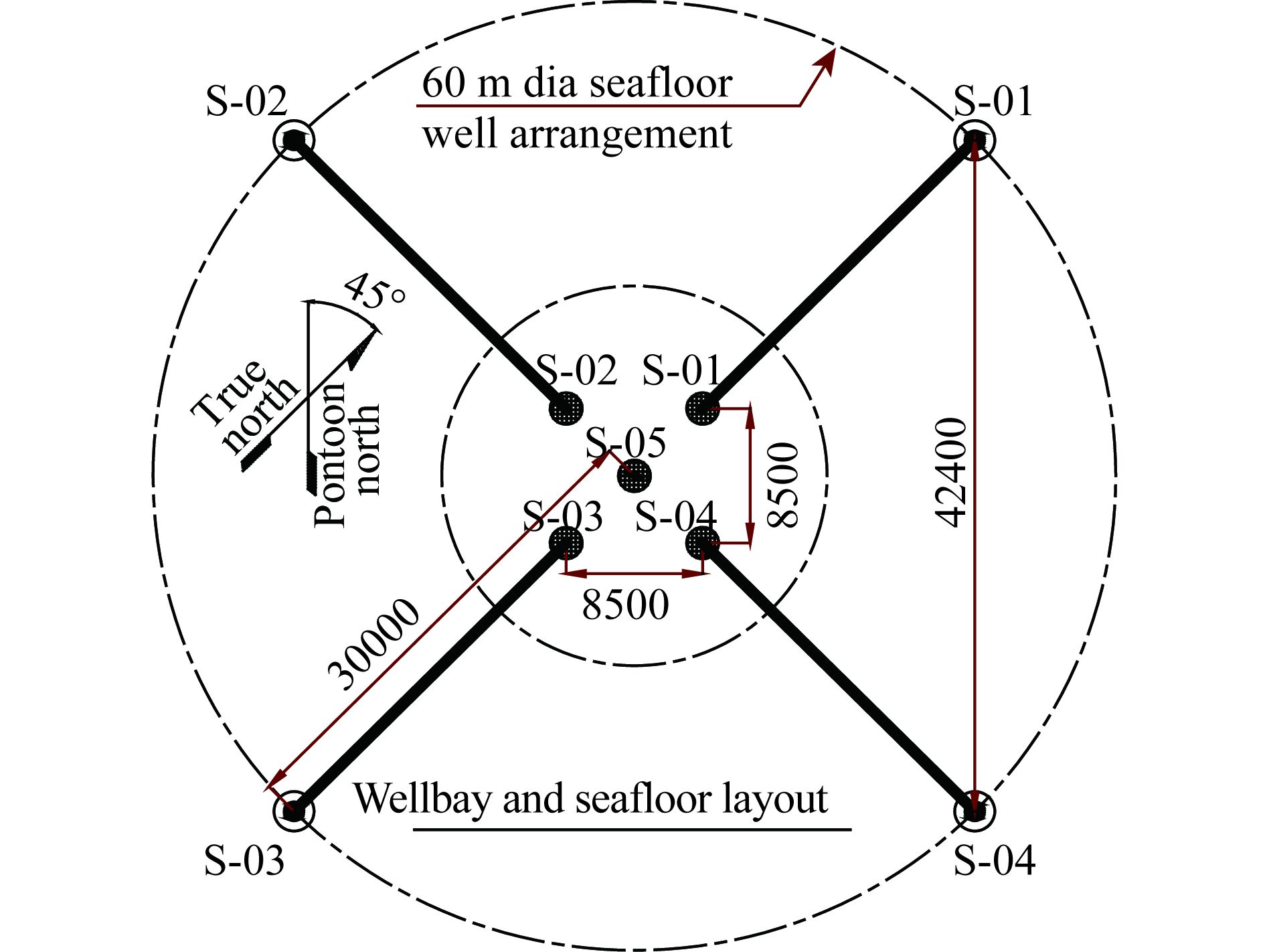
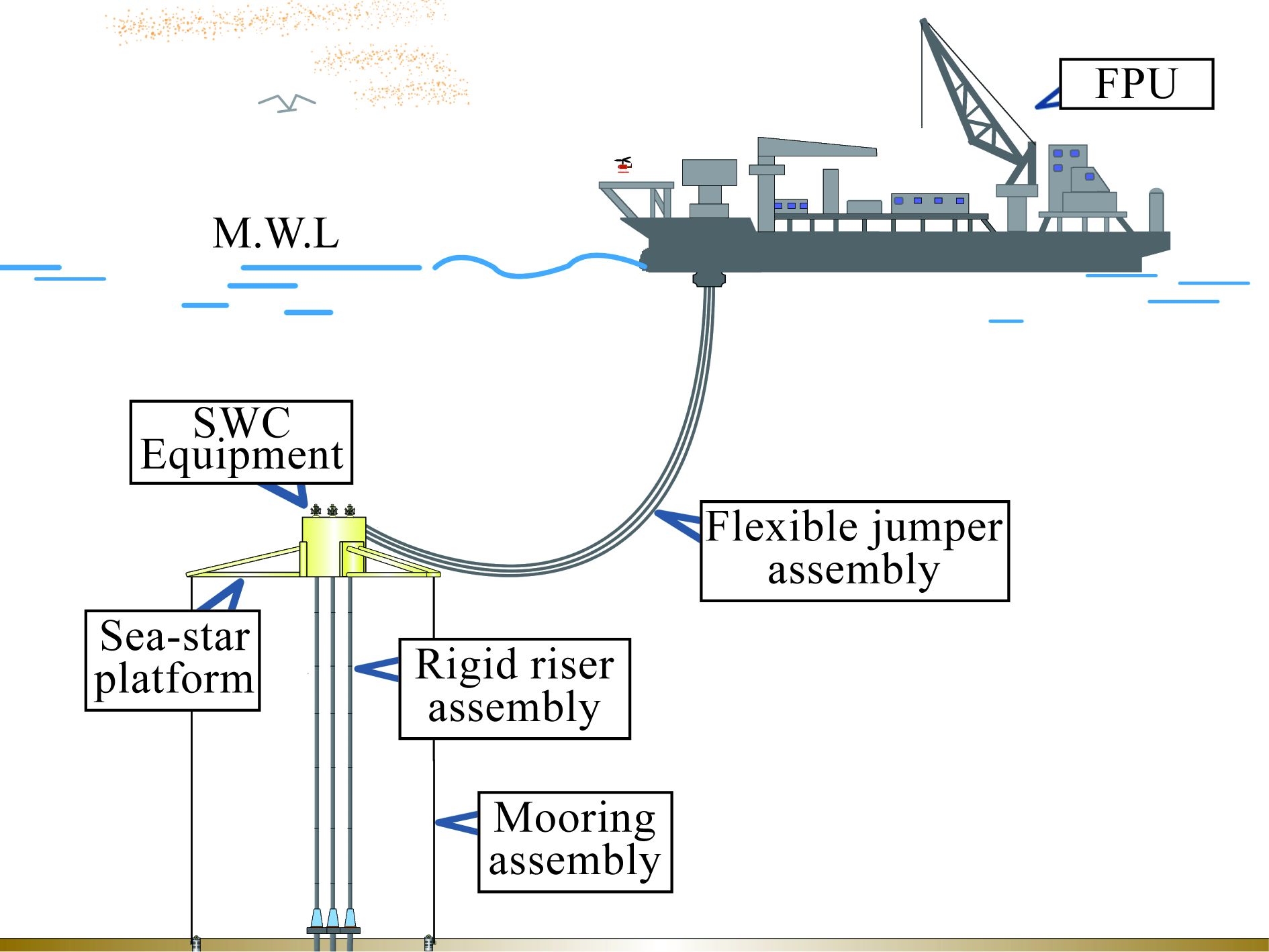
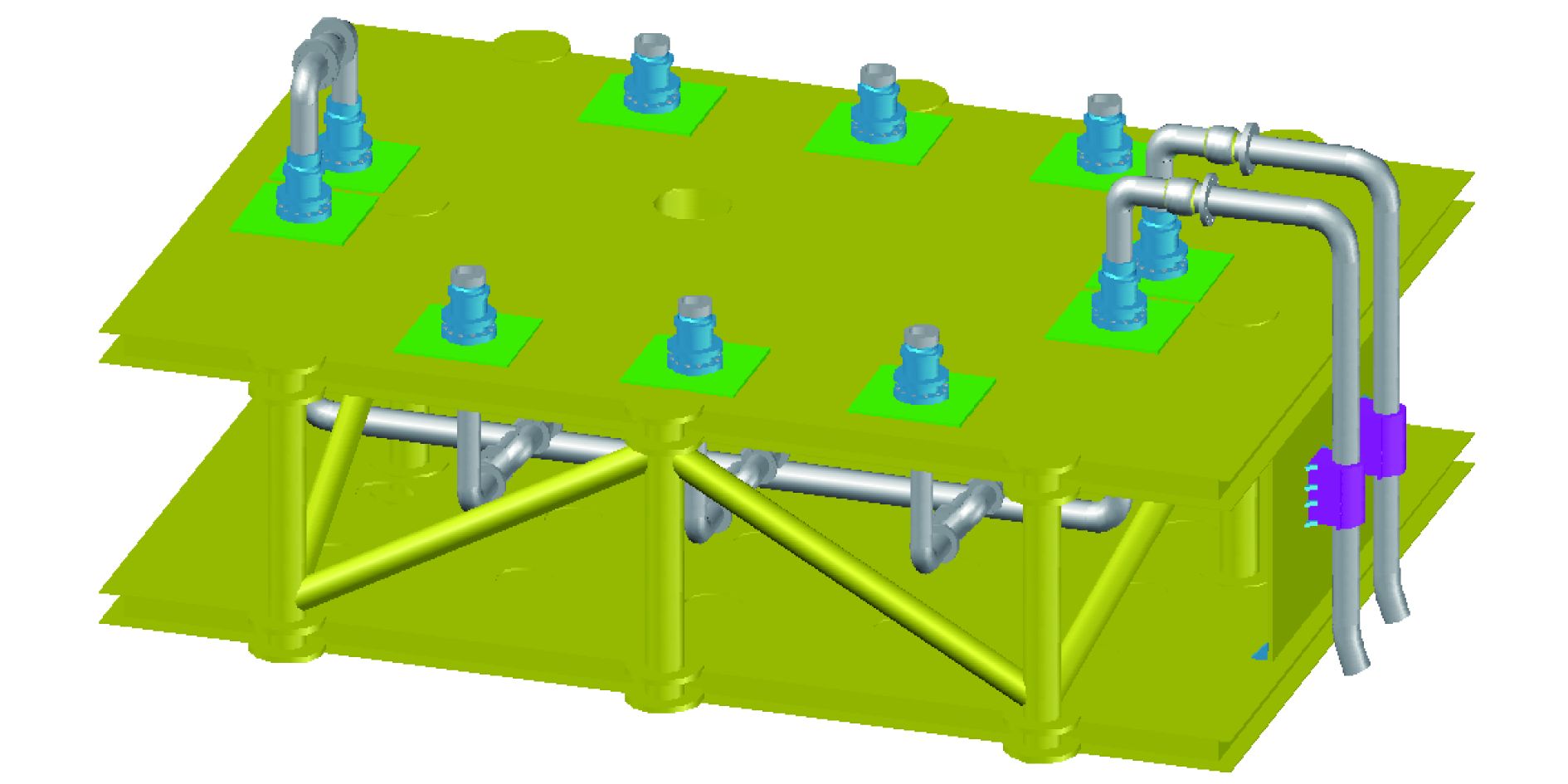
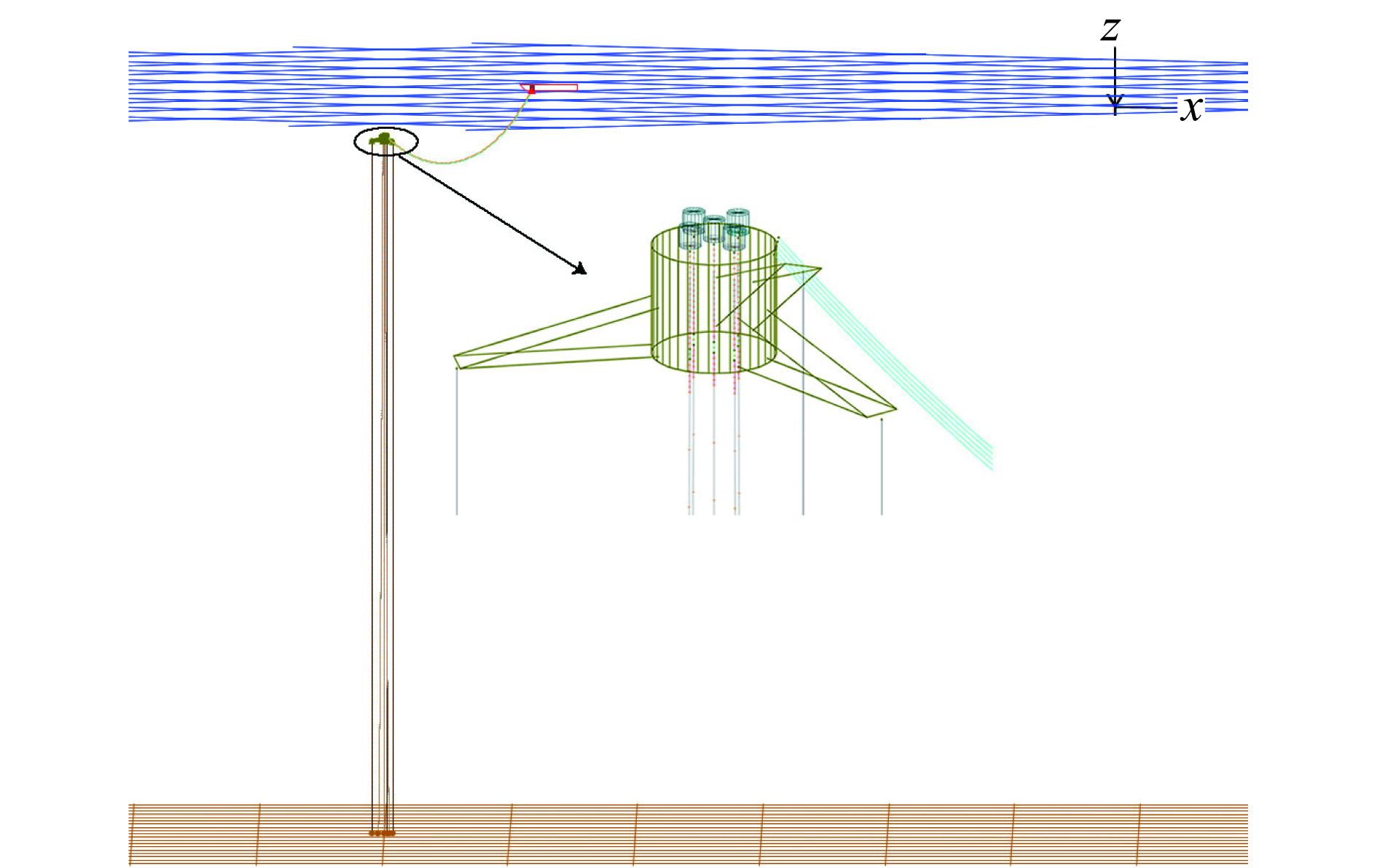
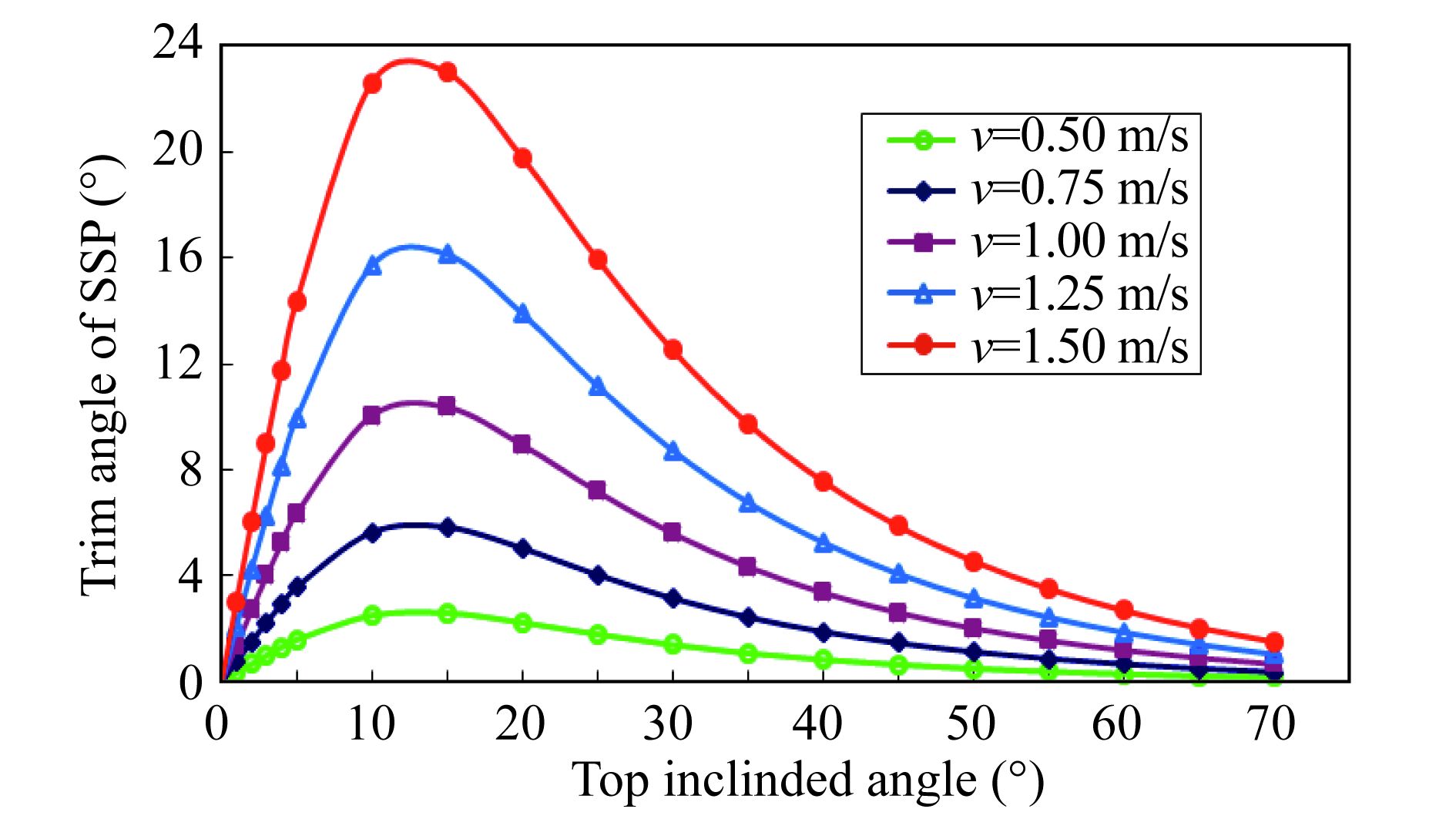
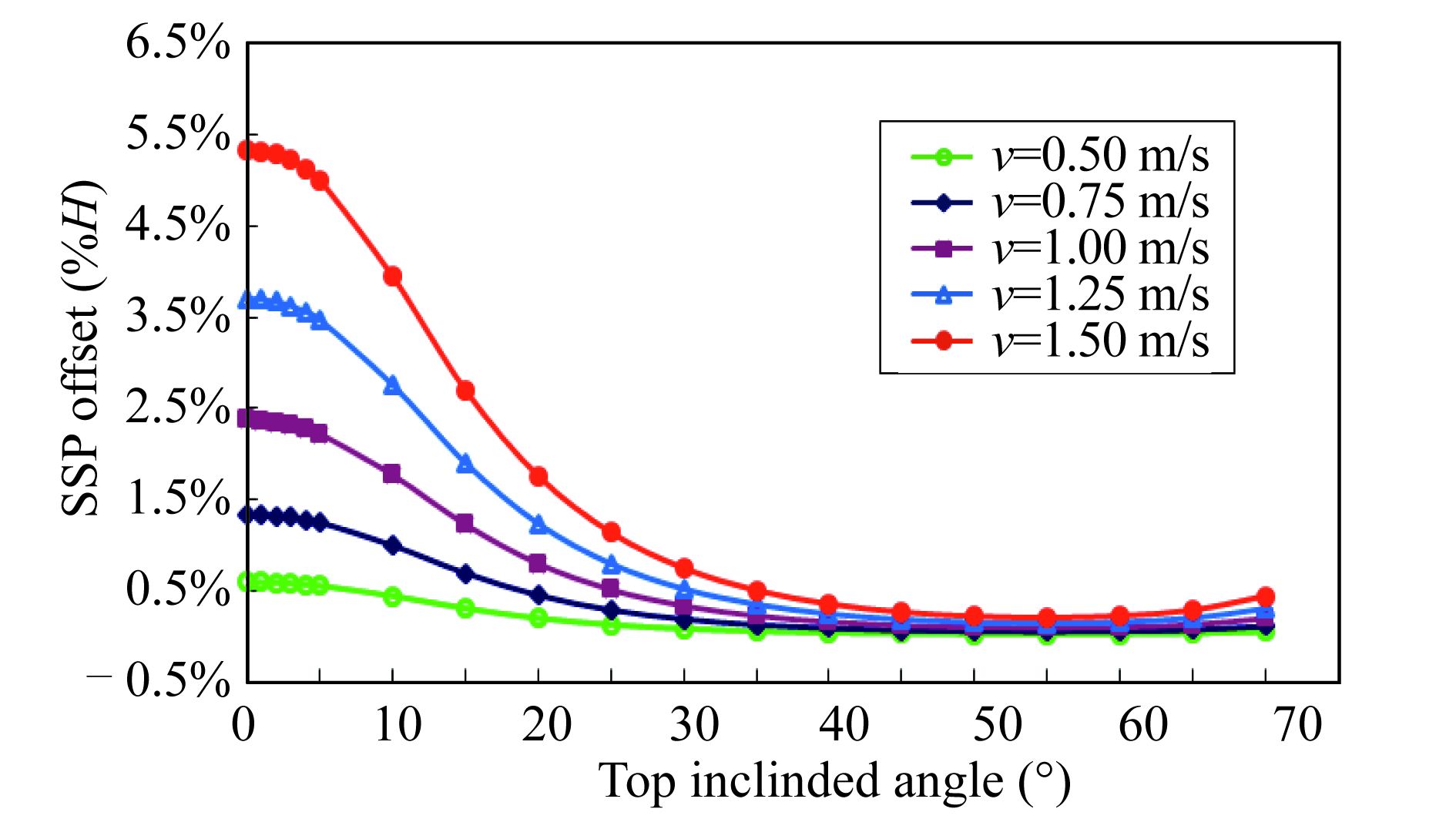
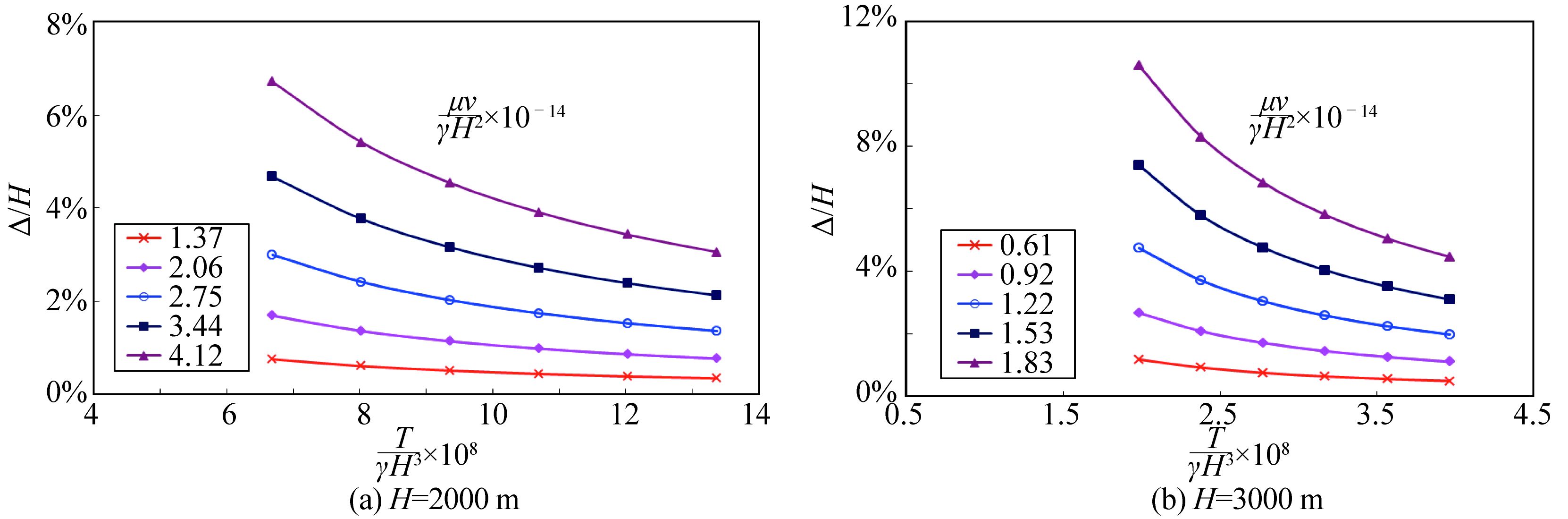
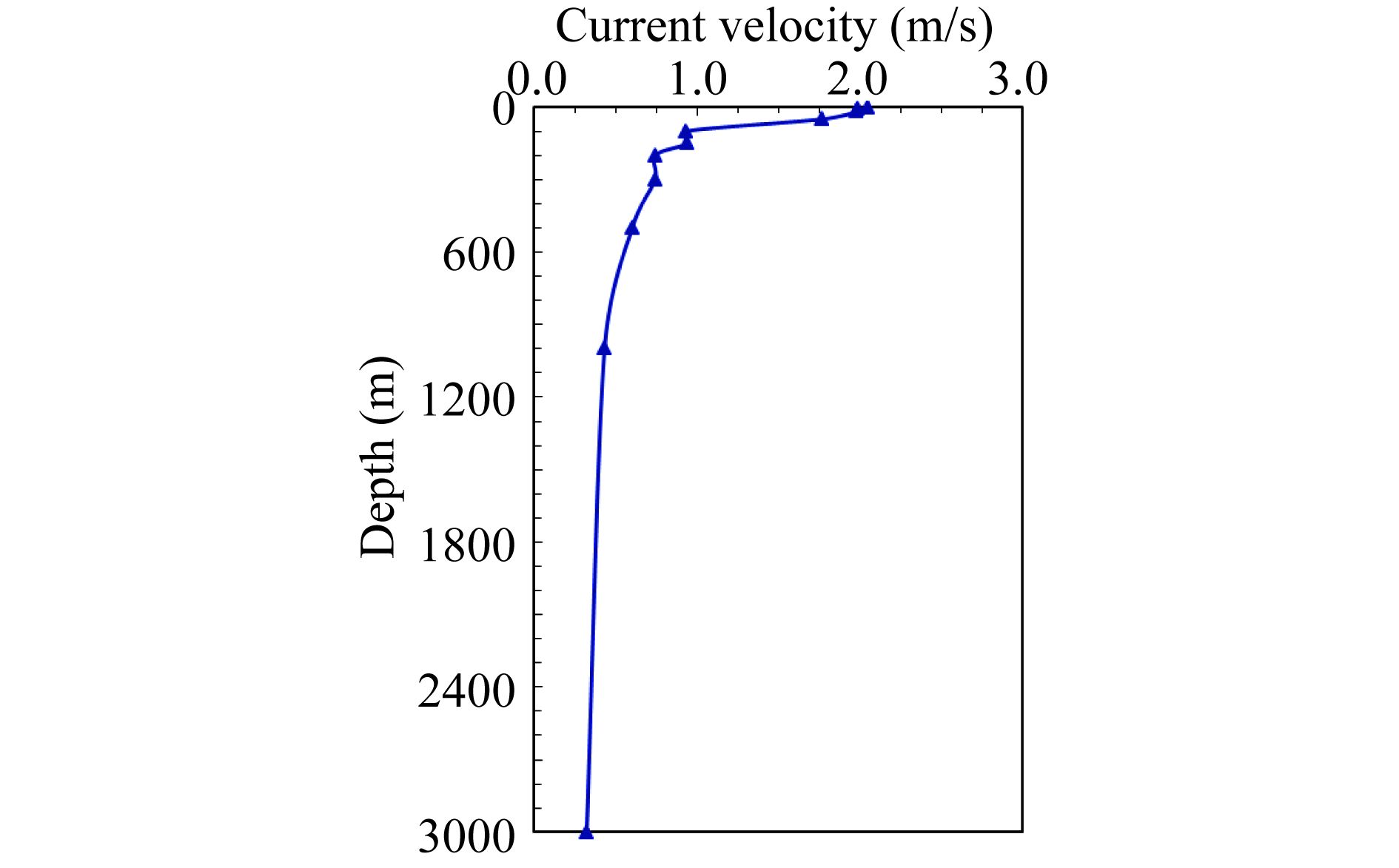
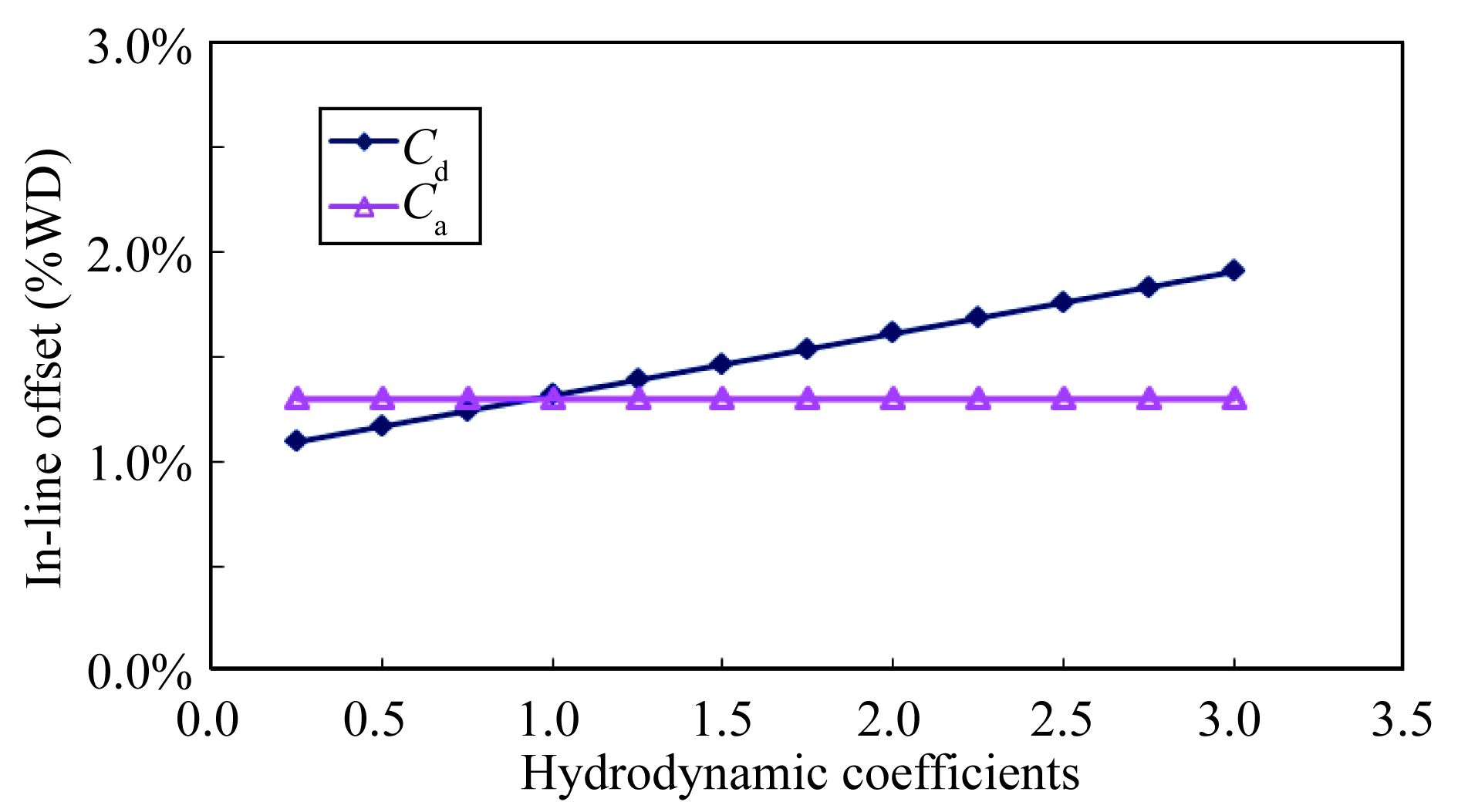
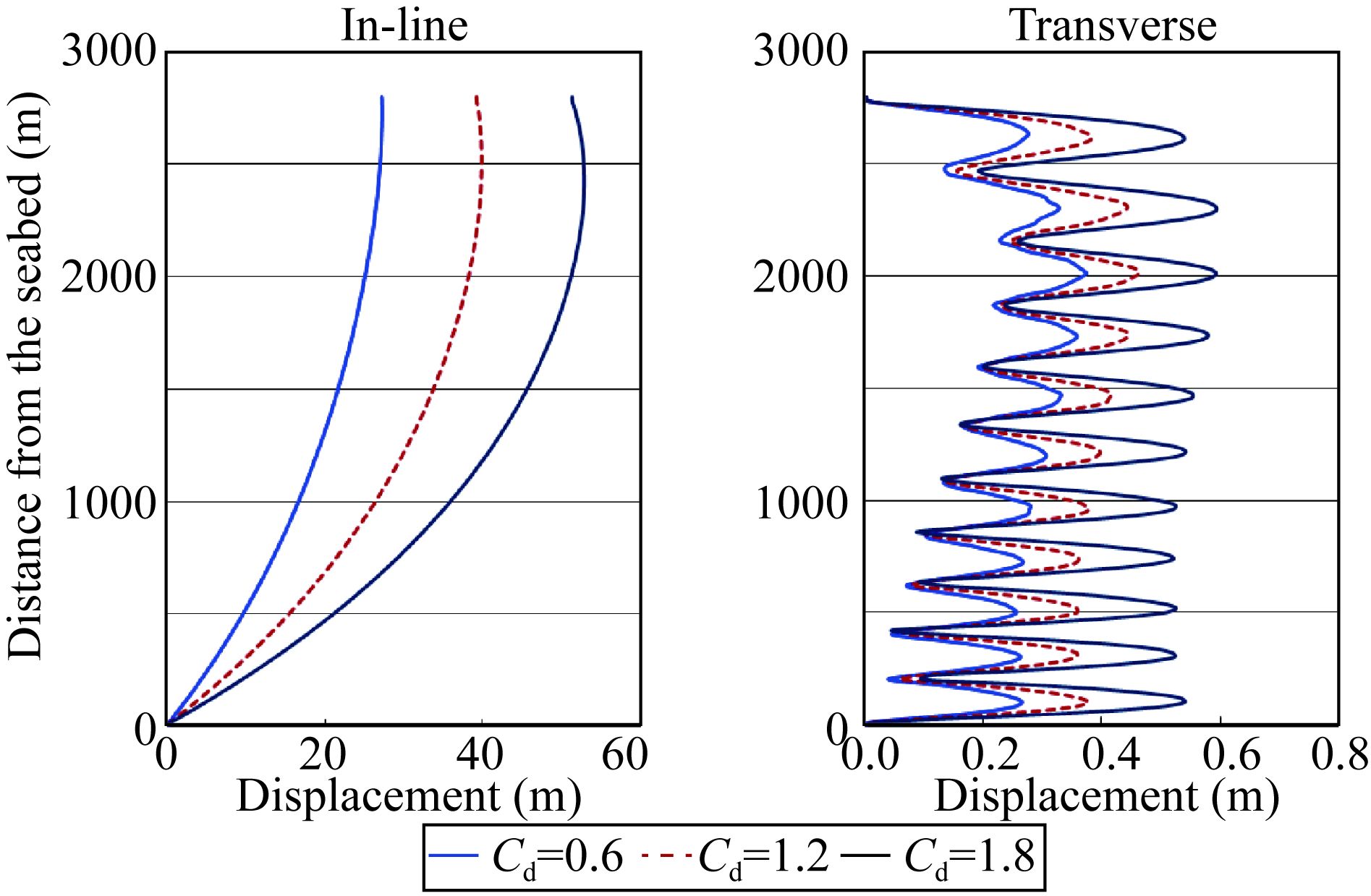
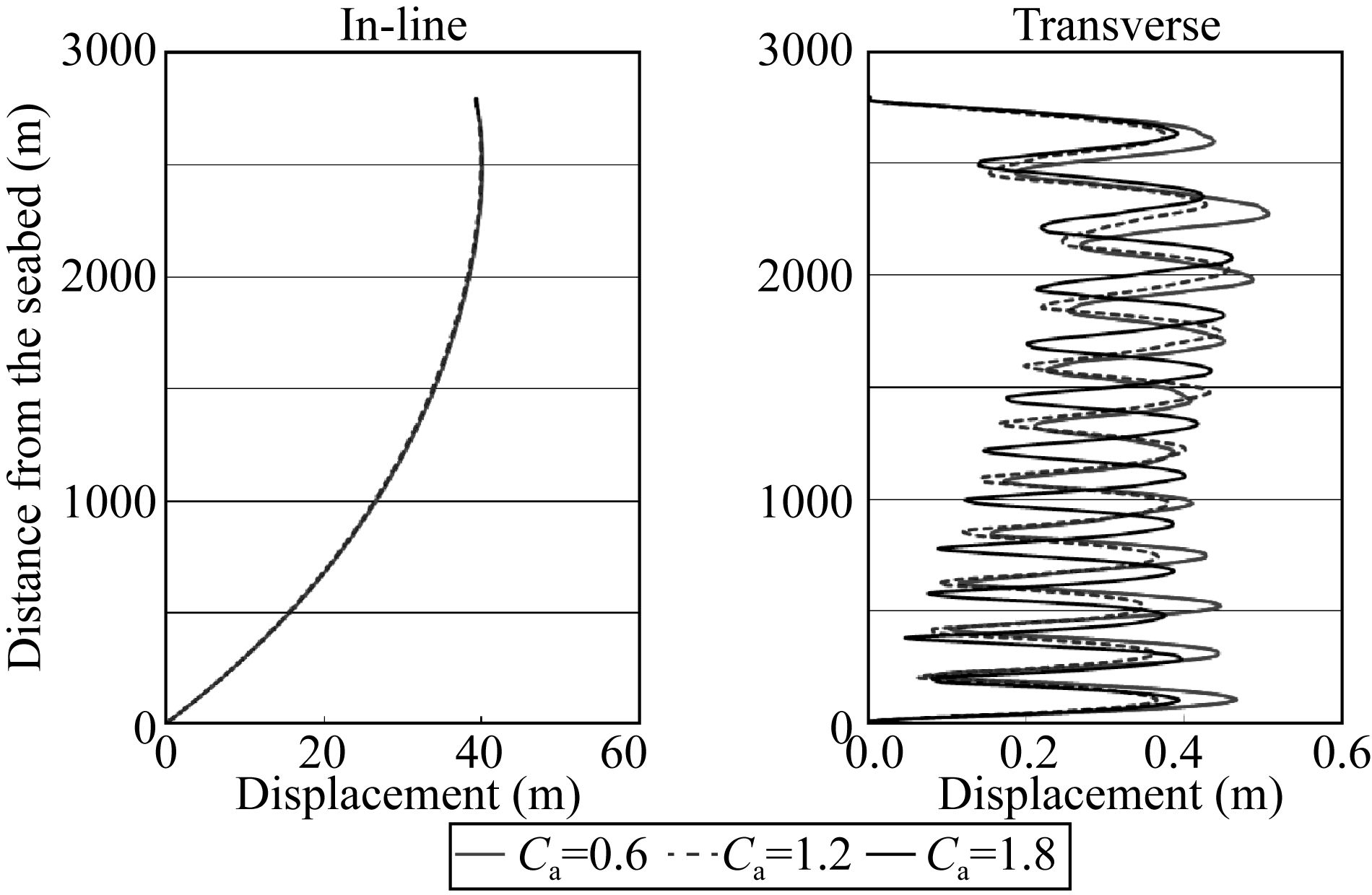
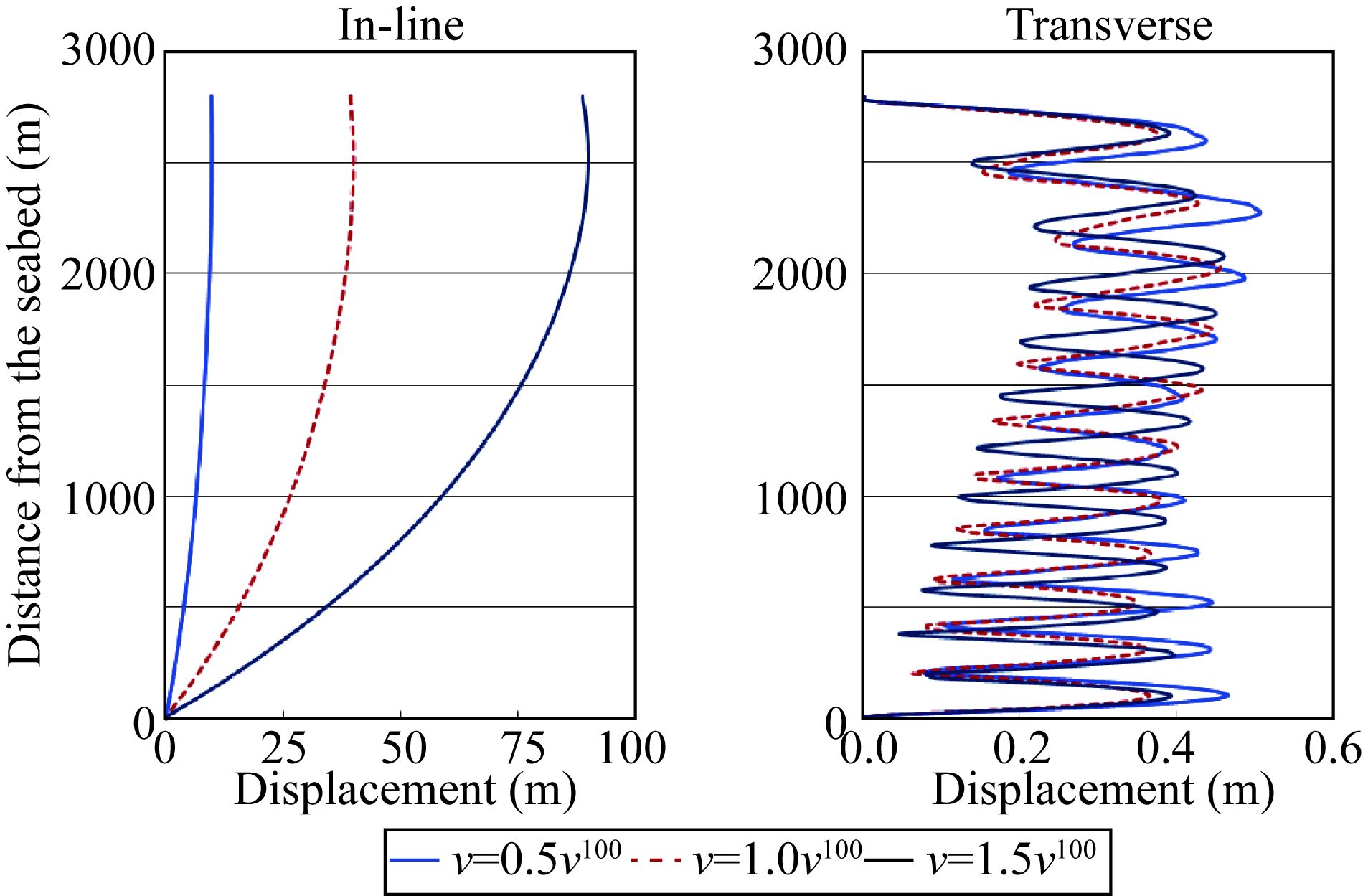
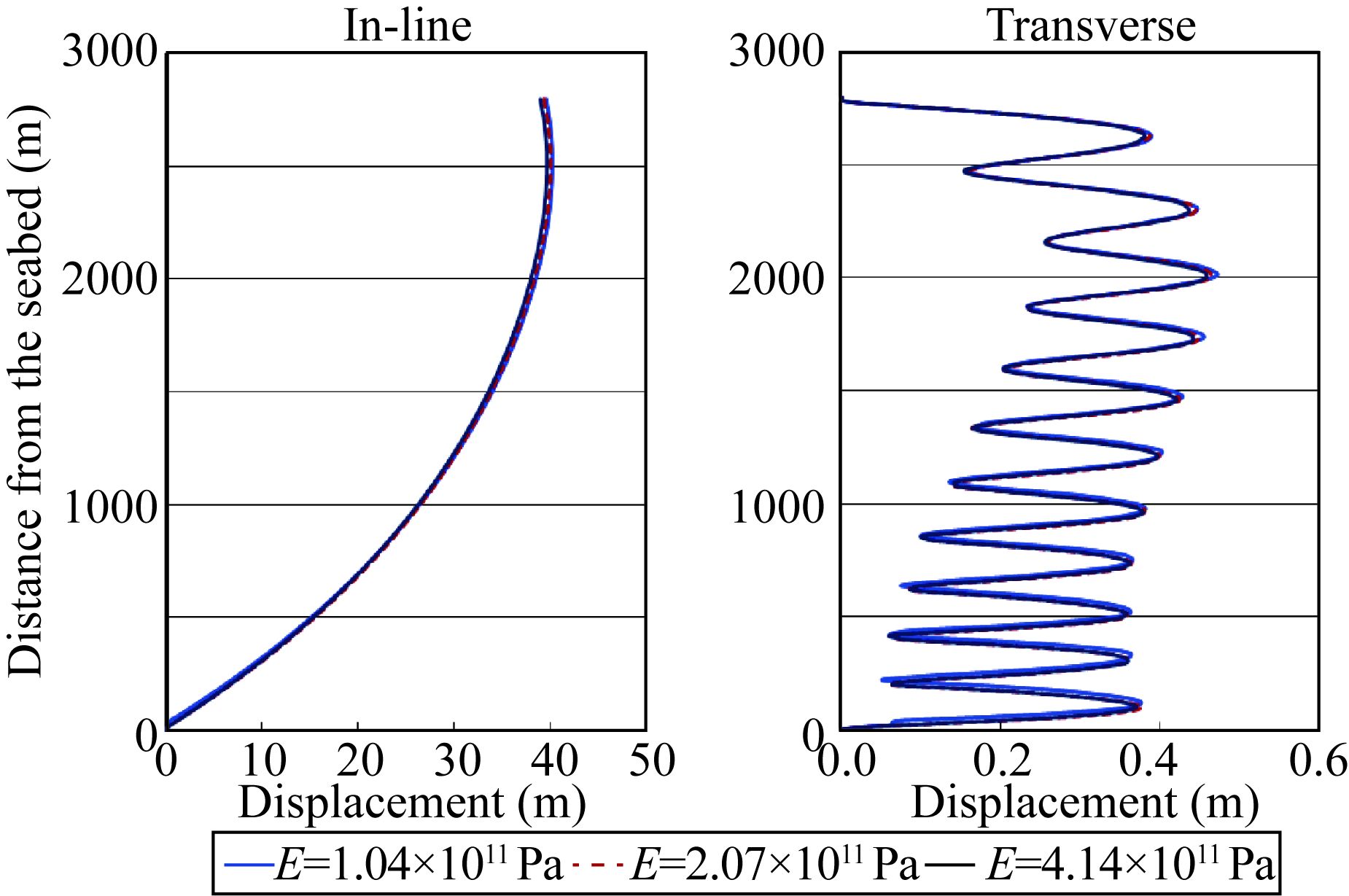
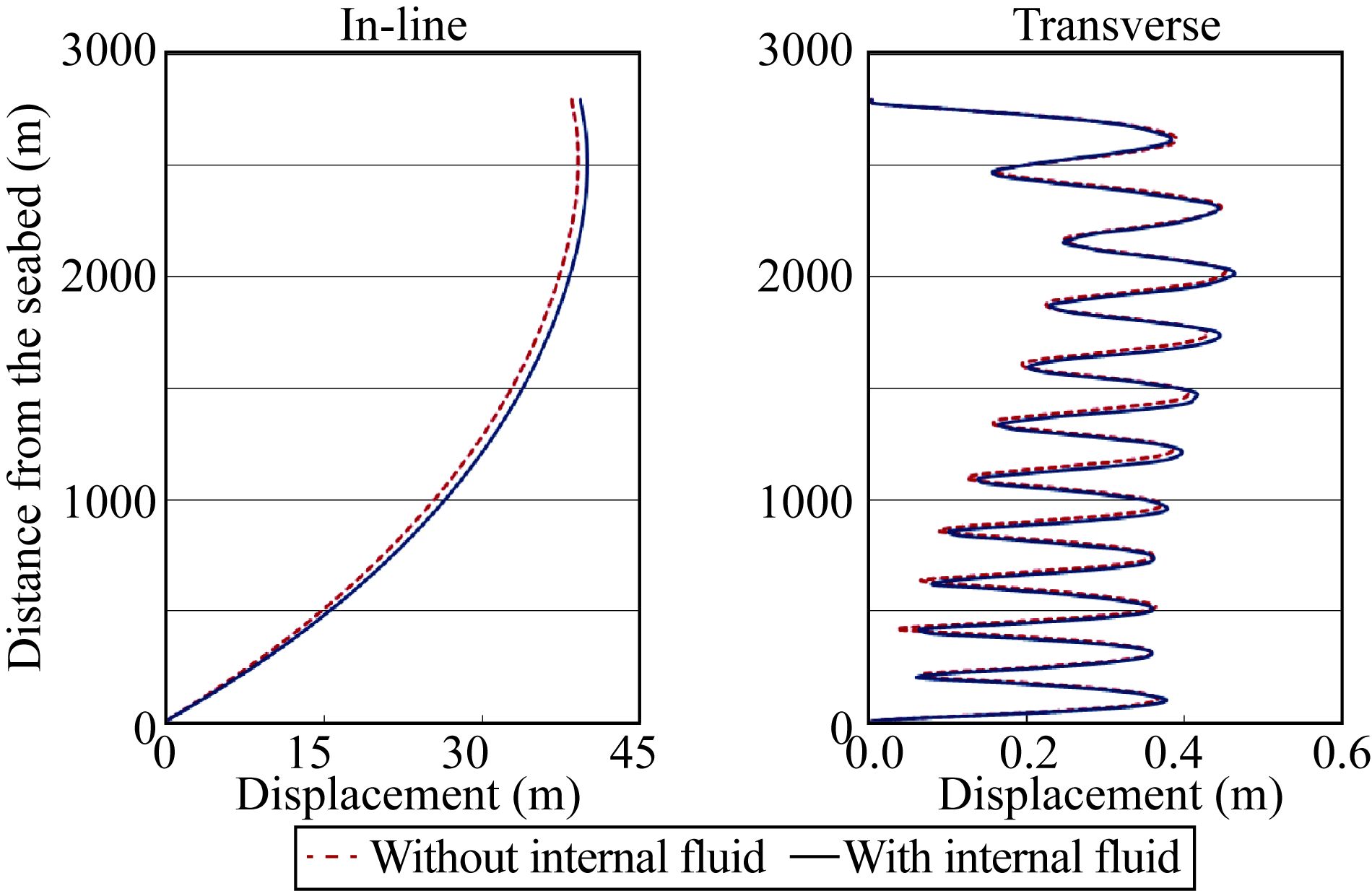
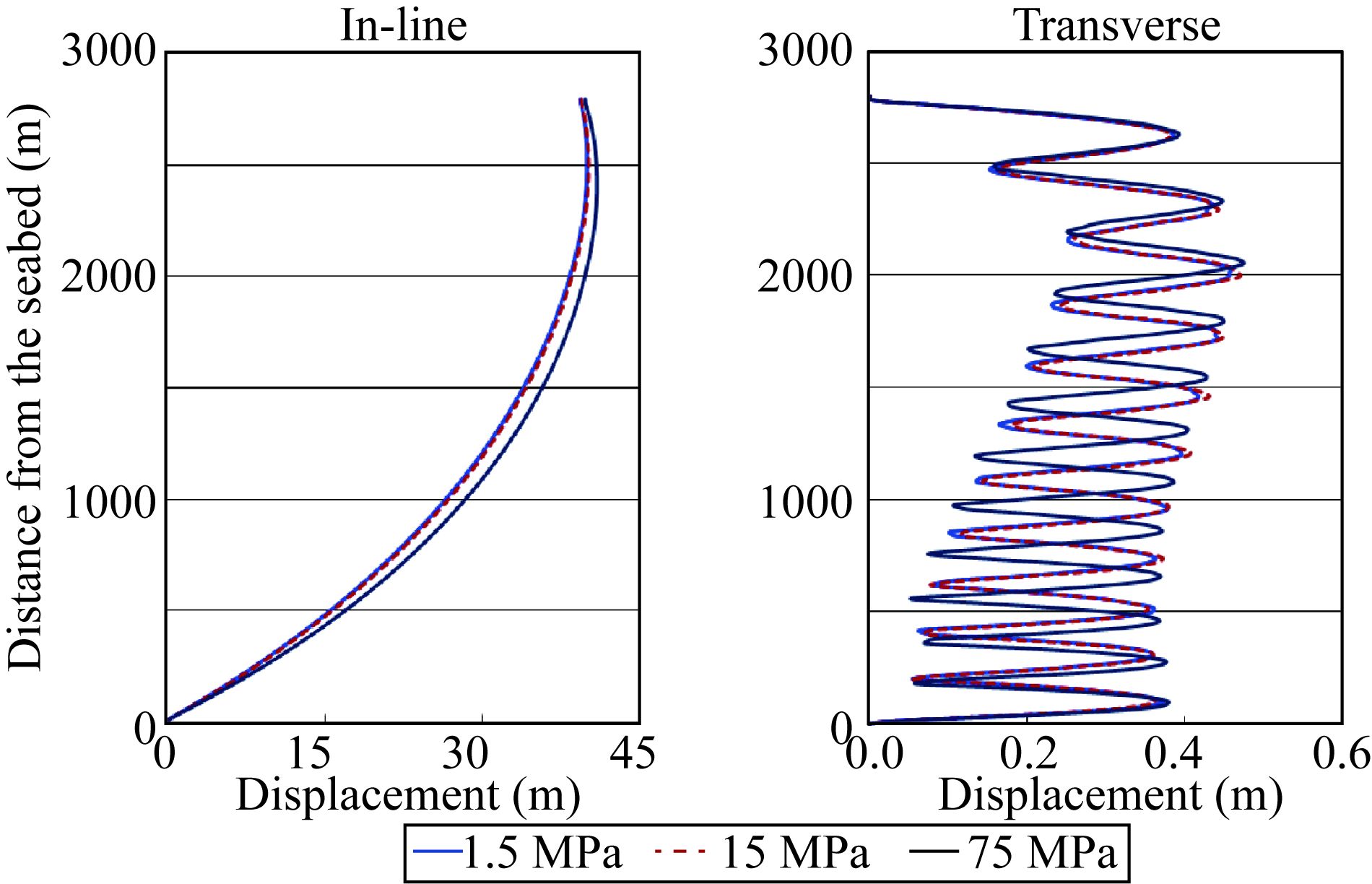
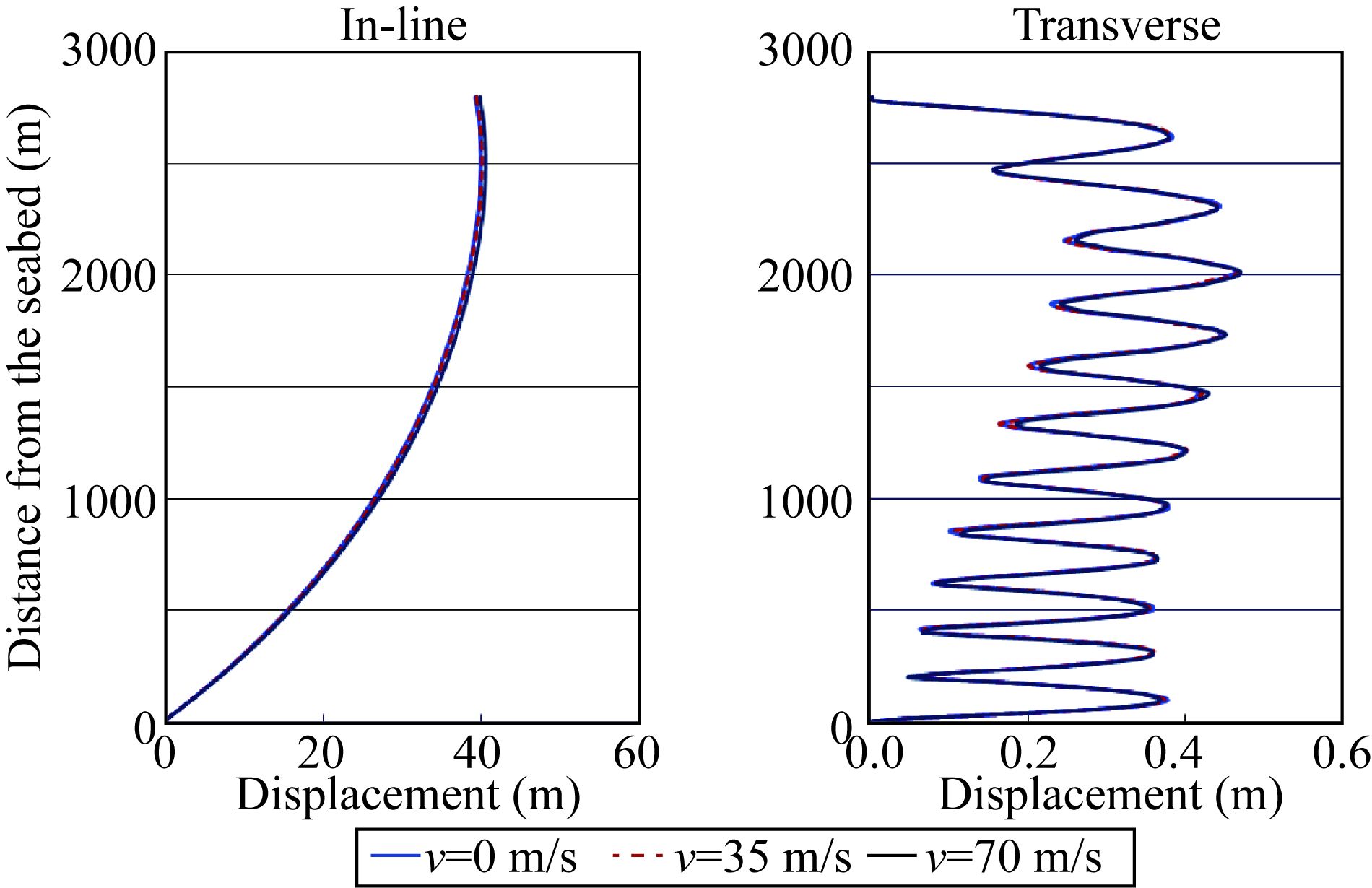
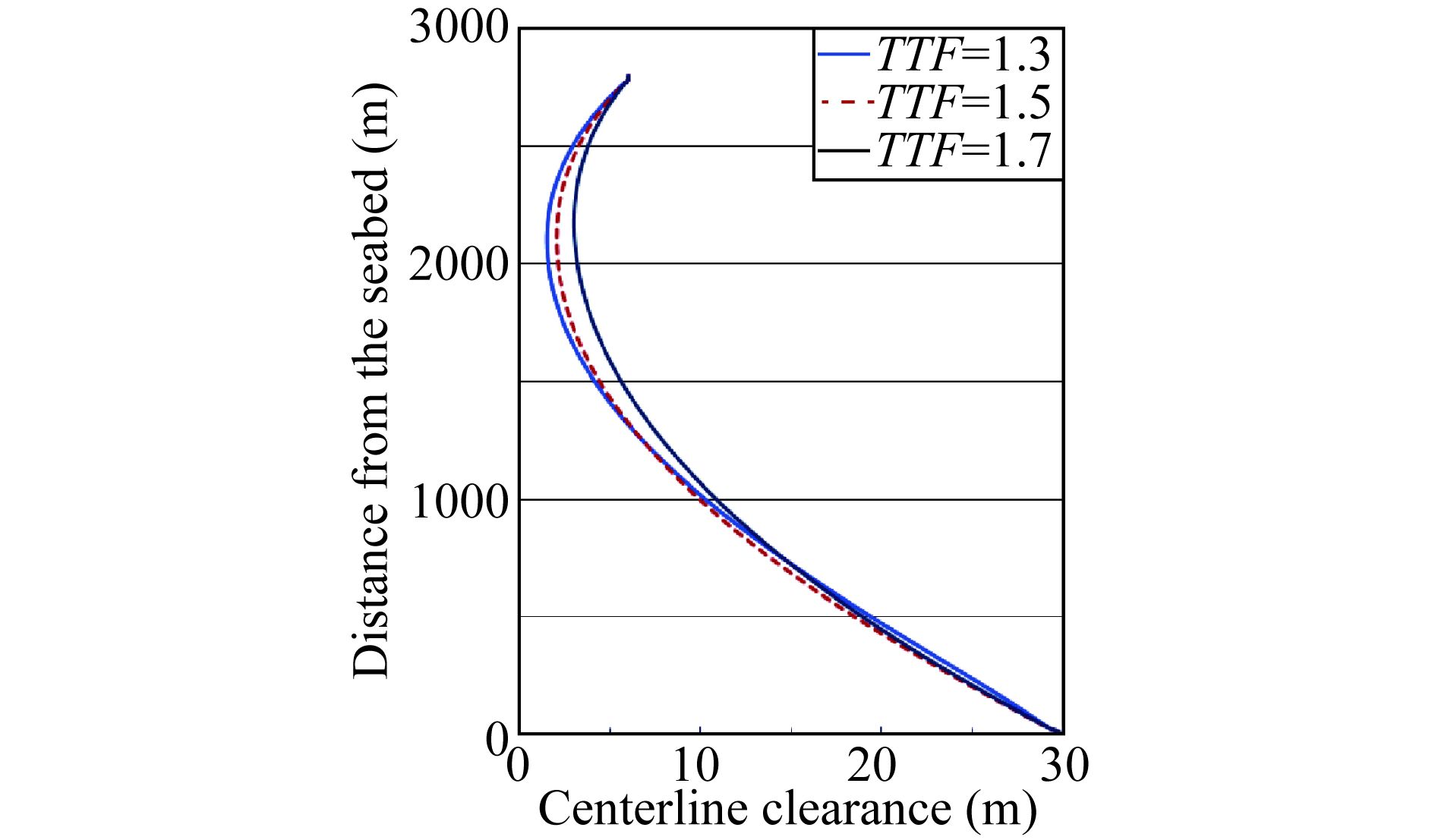
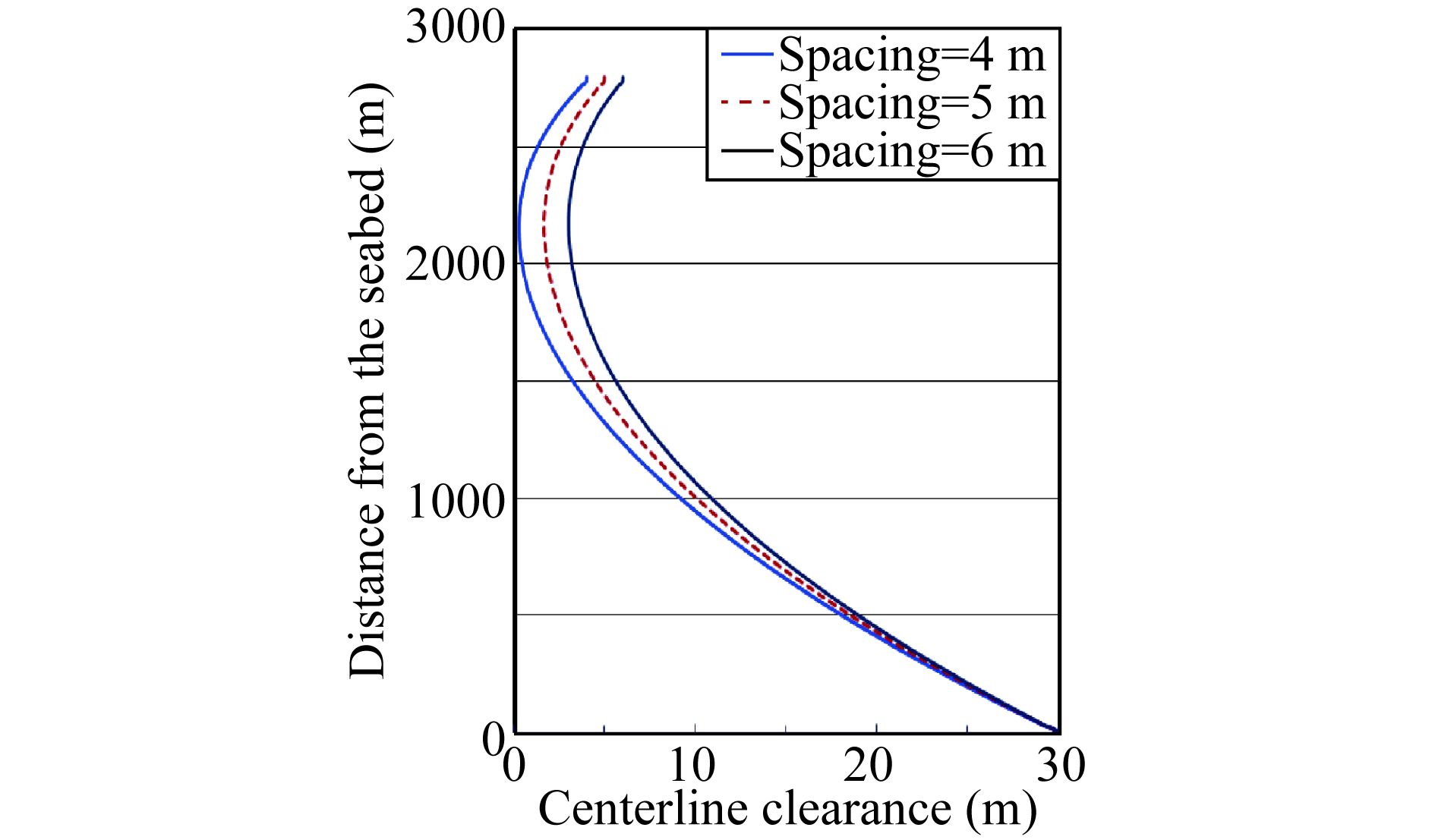
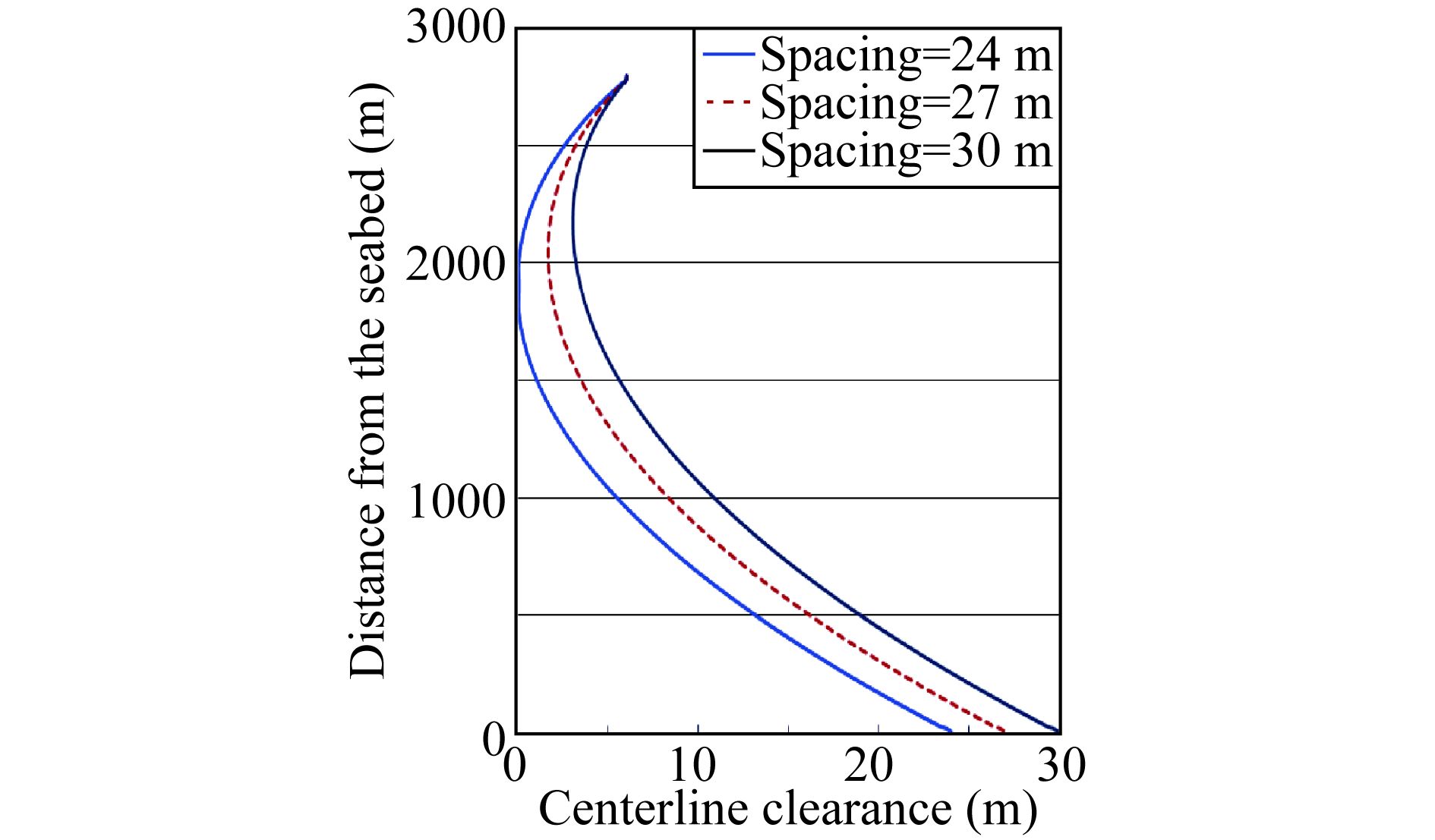
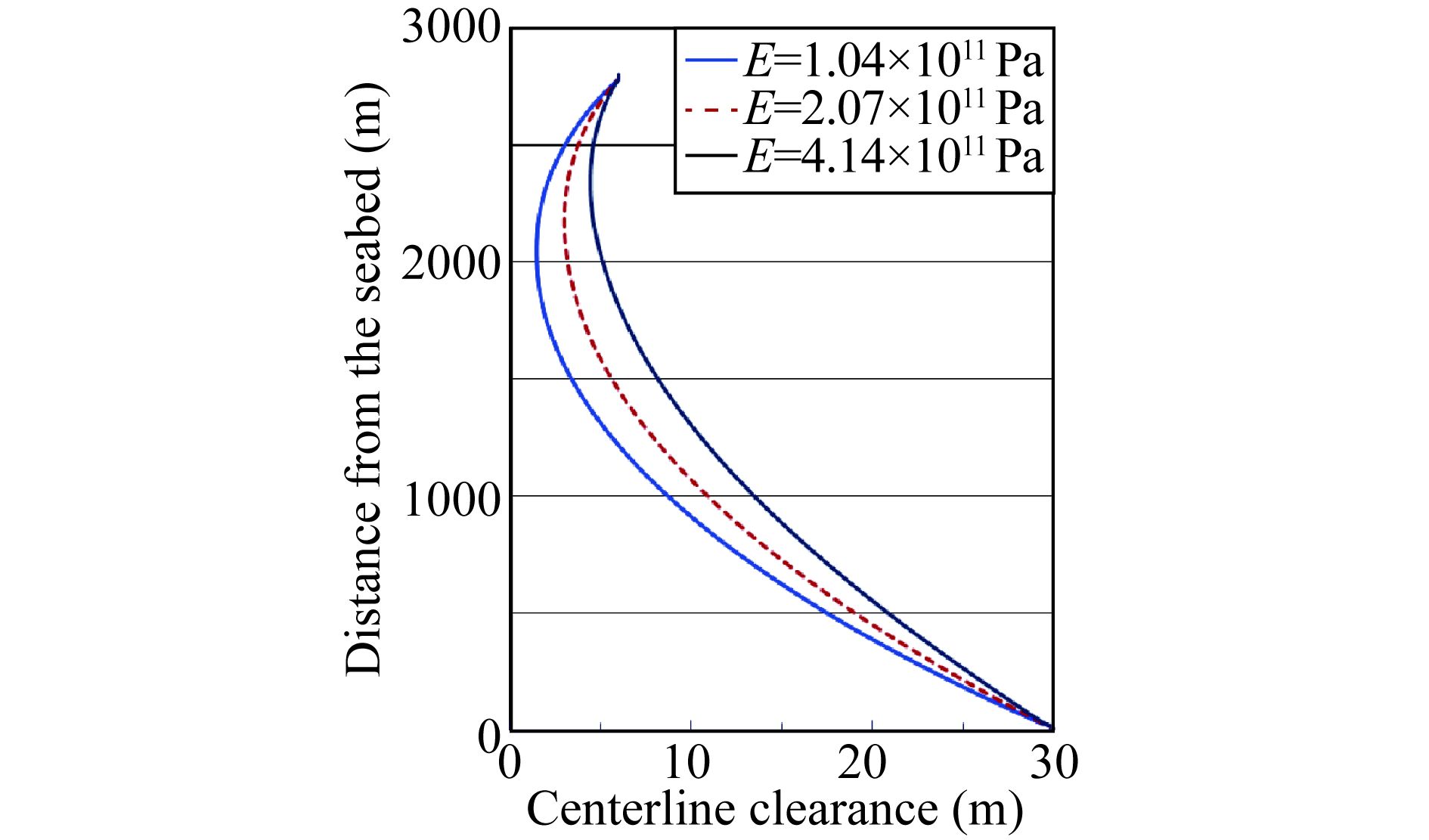
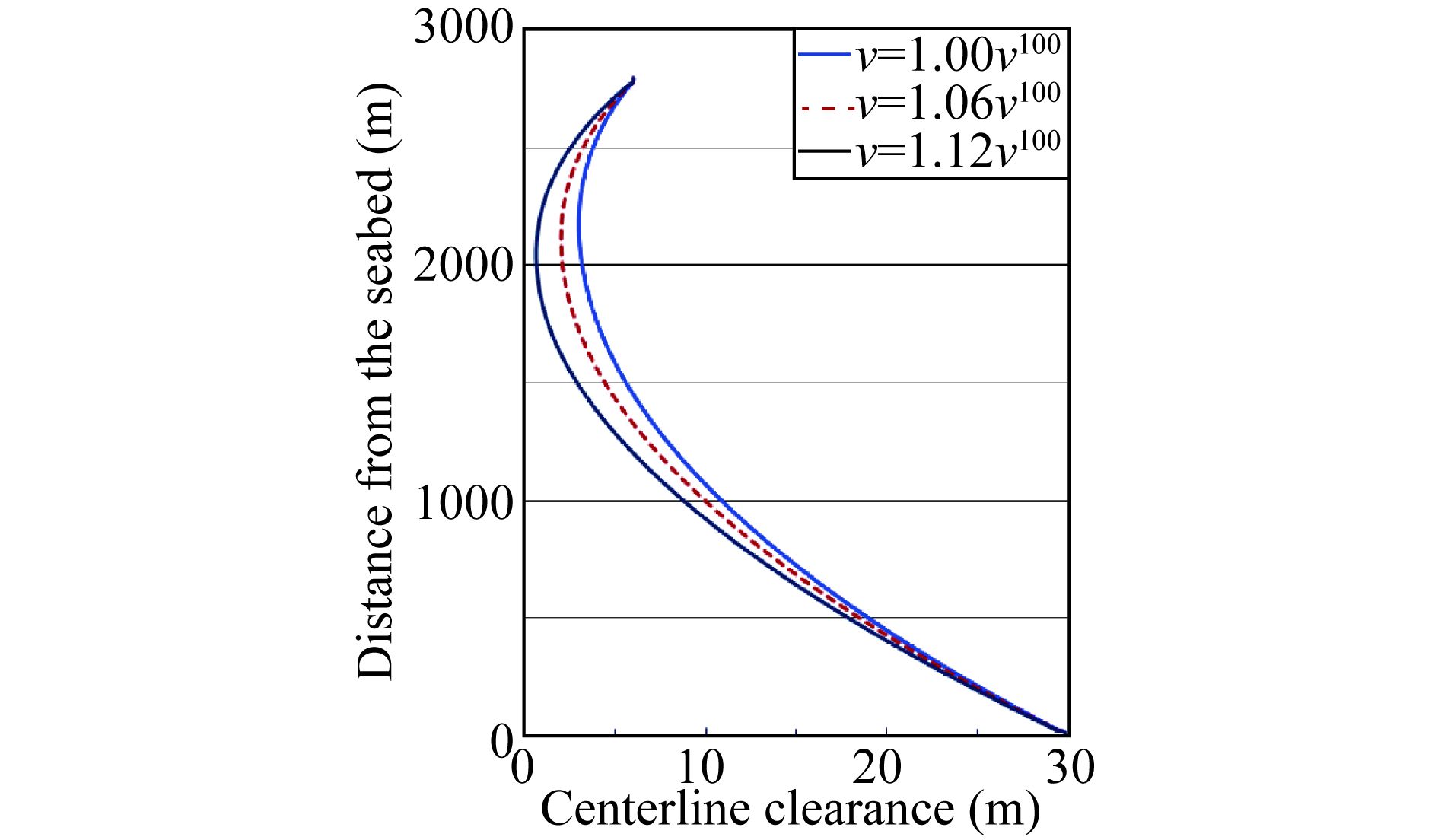
This study focuses on a new technology of Subsurface Tension Leg Platform (STLP), which utilizes the shallow-water rated well completion equipment and technology for the development of large oil and gas fields in ultra-deep water (UDW). Thus, the STLP concept offers attractive advantages over conventional field development concepts. STLP is basically a pre-installed Subsurface Sea-star Platform (SSP), which supports rigid risers and shallow-water rated well completion equipment. The paper details the results of the parametric study on the behavior of STLP at a water depth of 3000 m. At first, a general description of the STLP configuration and working principle is introduced. Then, the numerical models for the global analysis of the STLP in waves and current are presented. After that, extensive parametric studies are carried out with regarding to SSP/tethers system analysis, global dynamic analysis and riser interference analysis. Critical points are addressed on the mooring pattern and riser arrangement under the influence of ocean current, to ensure that the requirements on SSP stability and riser interference are well satisfied. Finally, conclusions and discussions are made. The results indicate that STLP is a competitive well and riser solution in up to 3000 m water depth for offshore petroleum production.
This study focuses on a new technology of Subsurface Tension Leg Platform (STLP), which utilizes the shallow-water rated well completion equipment and technology for the development of large oil and gas fields in ultra-deep water (UDW). Thus, the STLP concept offers attractive advantages over conventional field development concepts. STLP is basically a pre-installed Subsurface Sea-star Platform (SSP), which supports rigid risers and shallow-water rated well completion equipment. The paper details the results of the parametric study on the behavior of STLP at a water depth of 3000 m. At first, a general description of the STLP configuration and working principle is introduced. Then, the numerical models for the global analysis of the STLP in waves and current are presented. After that, extensive parametric studies are carried out with regarding to SSP/tethers system analysis, global dynamic analysis and riser interference analysis. Critical points are addressed on the mooring pattern and riser arrangement under the influence of ocean current, to ensure that the requirements on SSP stability and riser interference are well satisfied. Finally, conclusions and discussions are made. The results indicate that STLP is a competitive well and riser solution in up to 3000 m water depth for offshore petroleum production.


2017, 31(5): 598-606.
doi: 10.1007/s13344-017-0069-3
Abstract:
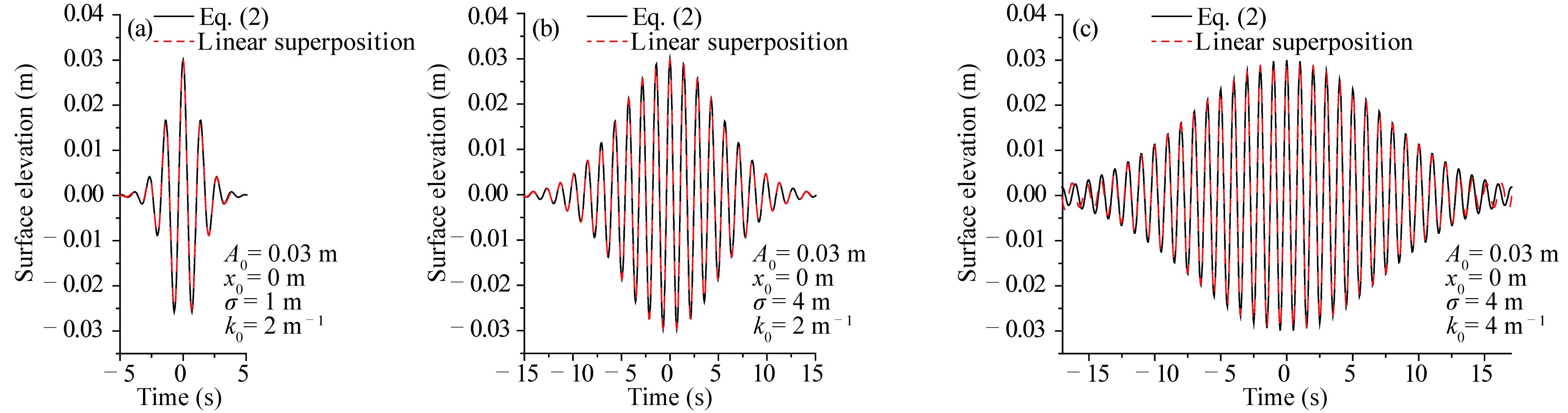
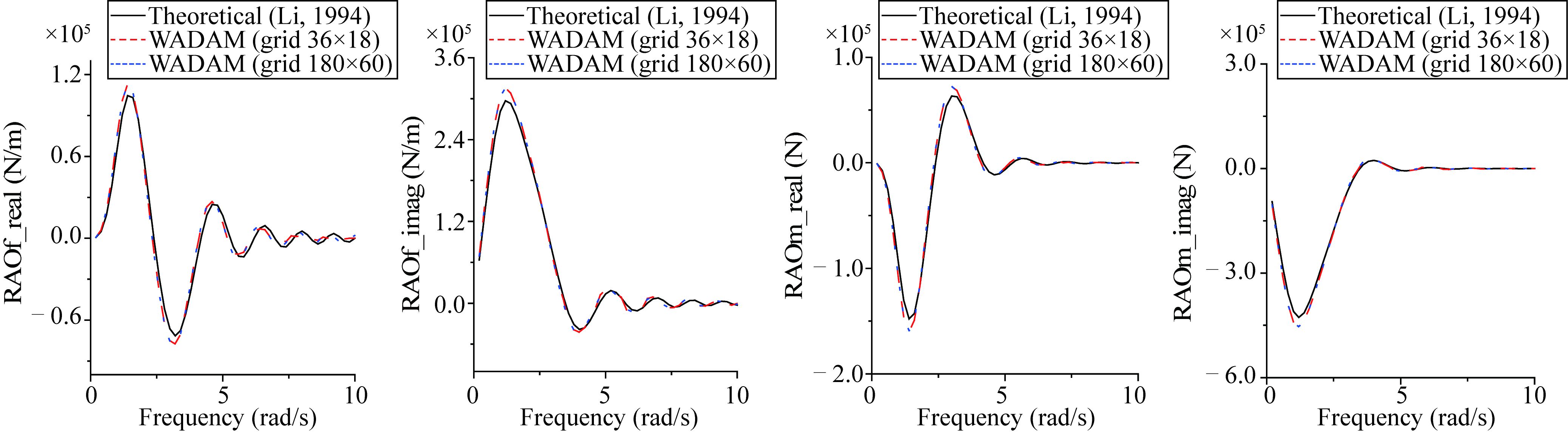
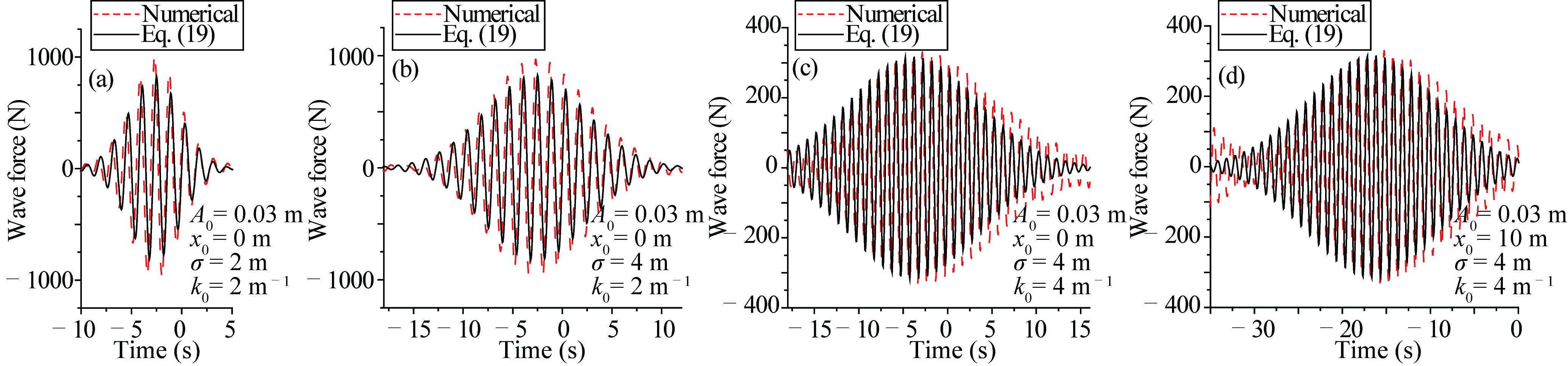
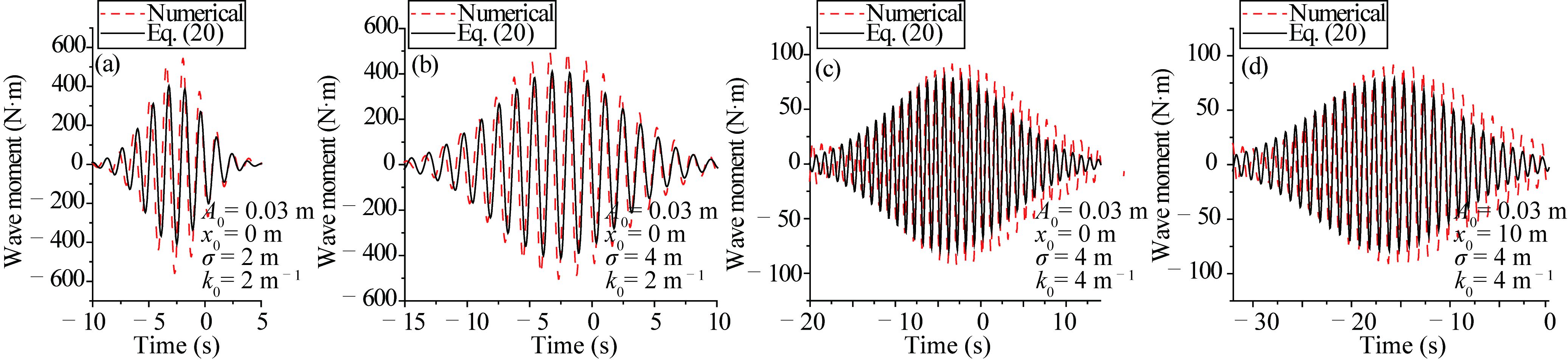
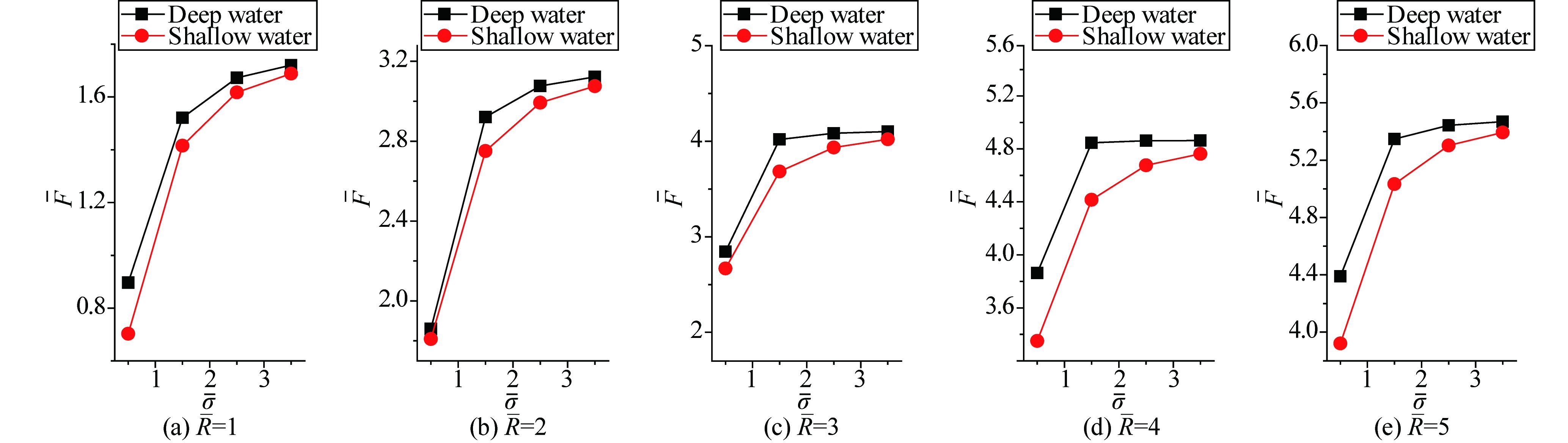
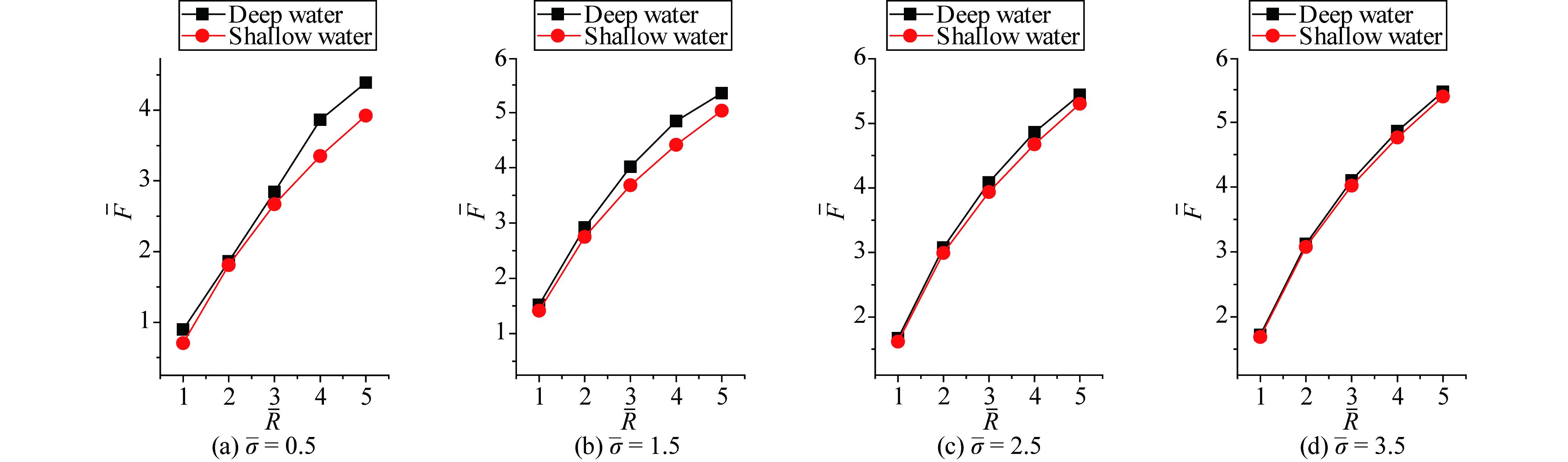
Until now, most researches into the rogue-wave-structure interaction have relied on experimental measurement and numerical simulation. Owing to the complexity of the physical mechanism of rogue waves, theoretical study on the wave-structure issue still makes little progress. In this paper, the rogue wave flow around a vertical cylinder is analytically studied within the scope of the potential theory. The rogue wave is modeled by the Gauss envelope, which is one particular case of the well-known focusing theory. The formulae of the wave-induced horizontal force and bending moment are proposed. For the convenience of engineering application, the derived formulae are simplified appropriately, and verified against numerical results. In addition, the influence of wave parameters, such as the energy focusing degree and the wave focusing position, is thoroughly investigated.
Until now, most researches into the rogue-wave-structure interaction have relied on experimental measurement and numerical simulation. Owing to the complexity of the physical mechanism of rogue waves, theoretical study on the wave-structure issue still makes little progress. In this paper, the rogue wave flow around a vertical cylinder is analytically studied within the scope of the potential theory. The rogue wave is modeled by the Gauss envelope, which is one particular case of the well-known focusing theory. The formulae of the wave-induced horizontal force and bending moment are proposed. For the convenience of engineering application, the derived formulae are simplified appropriately, and verified against numerical results. In addition, the influence of wave parameters, such as the energy focusing degree and the wave focusing position, is thoroughly investigated.
2017, 31(5): 607-617.
doi: 10.1007/s13344-017-0070-x
Abstract:
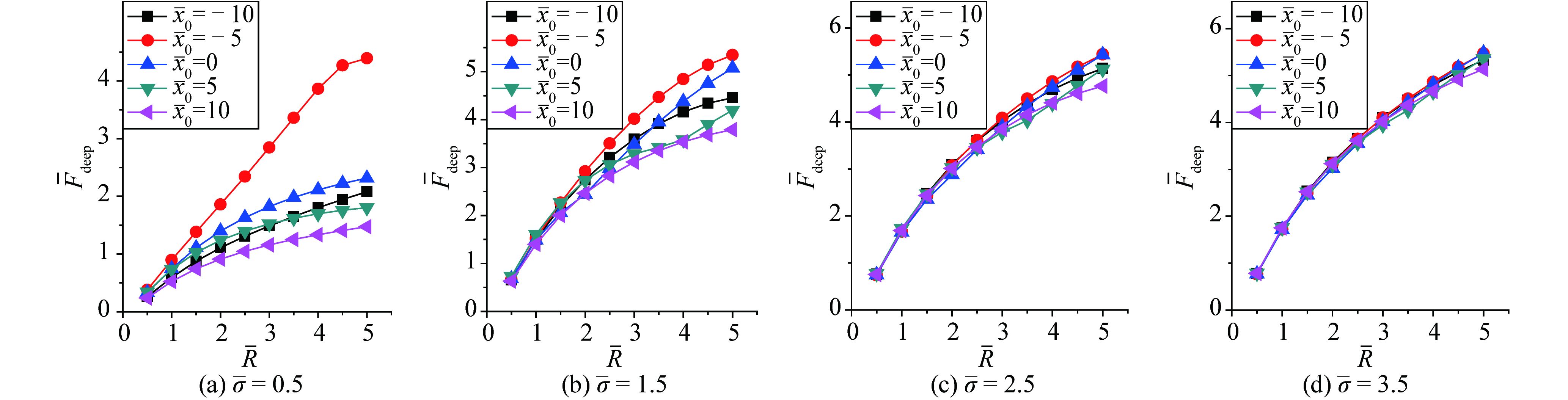
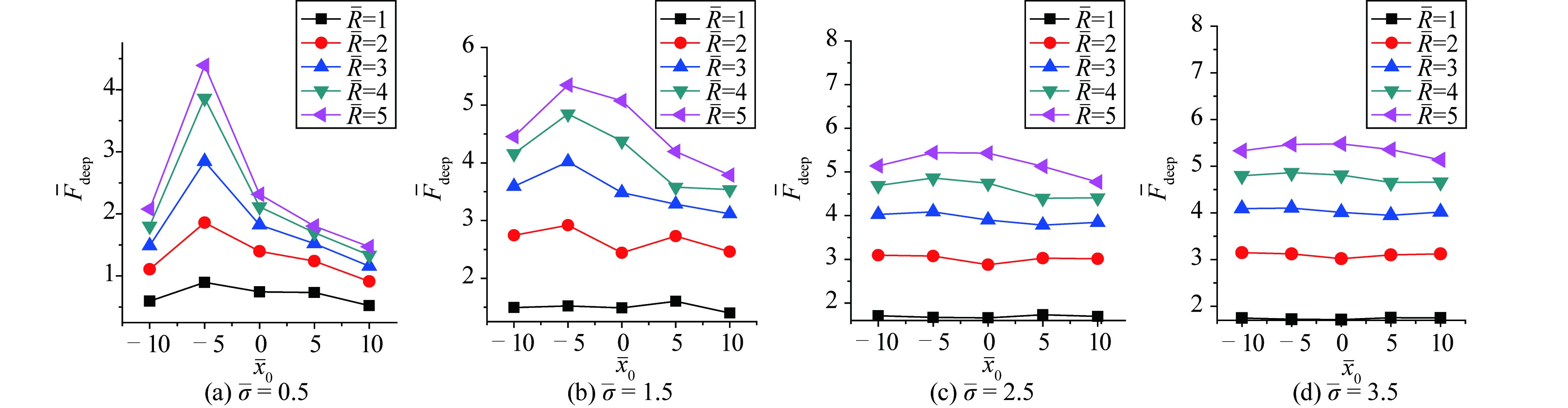
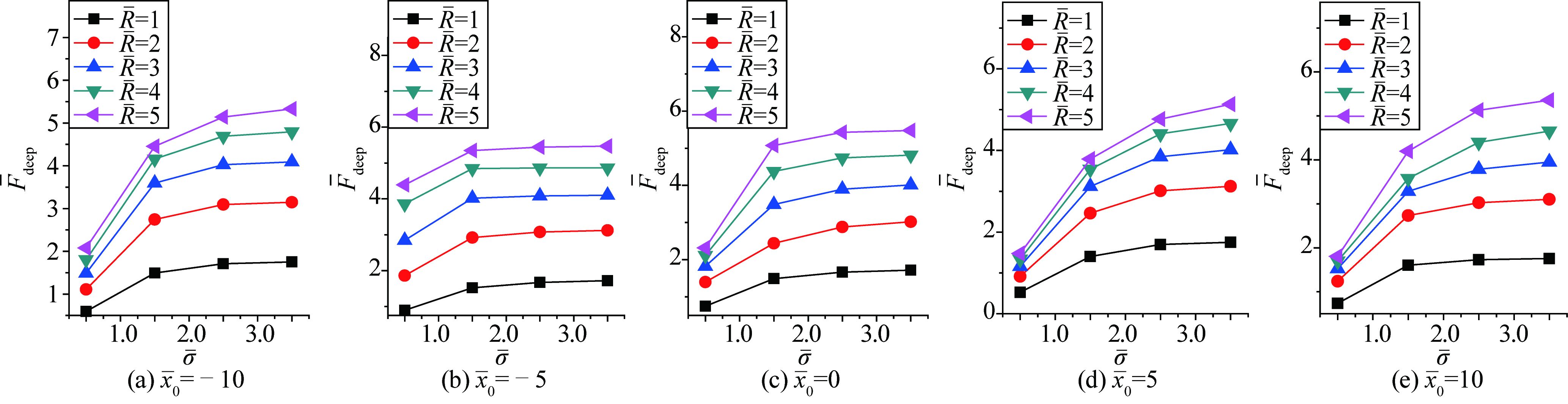
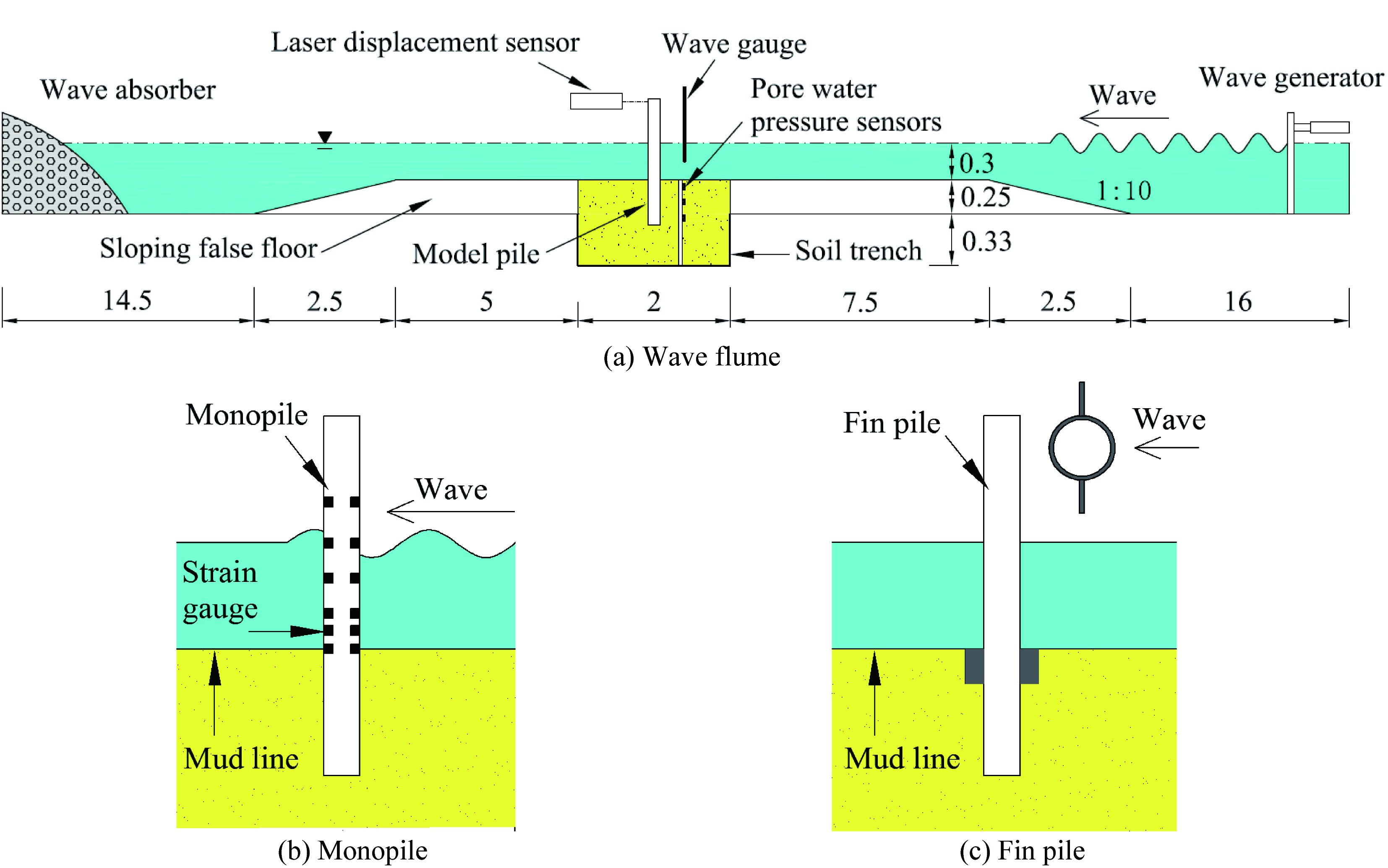
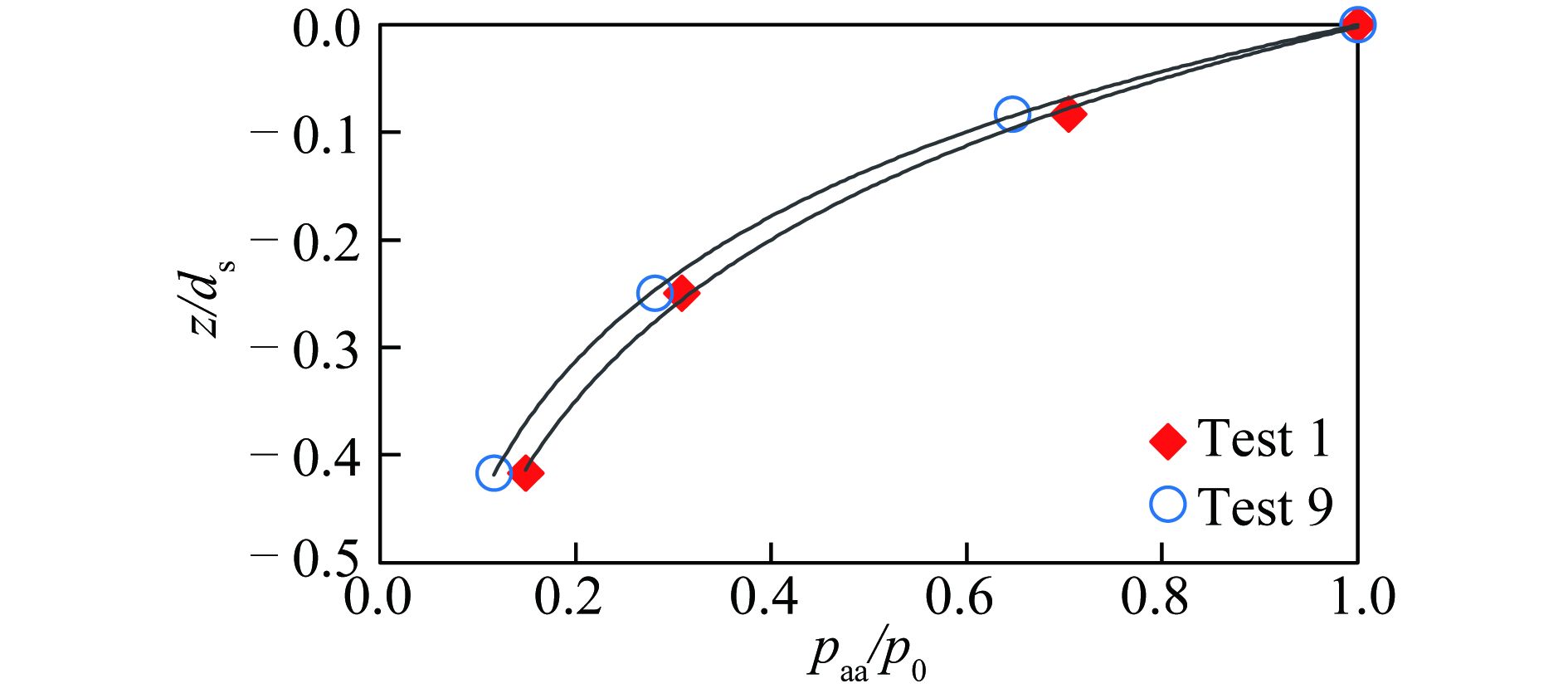
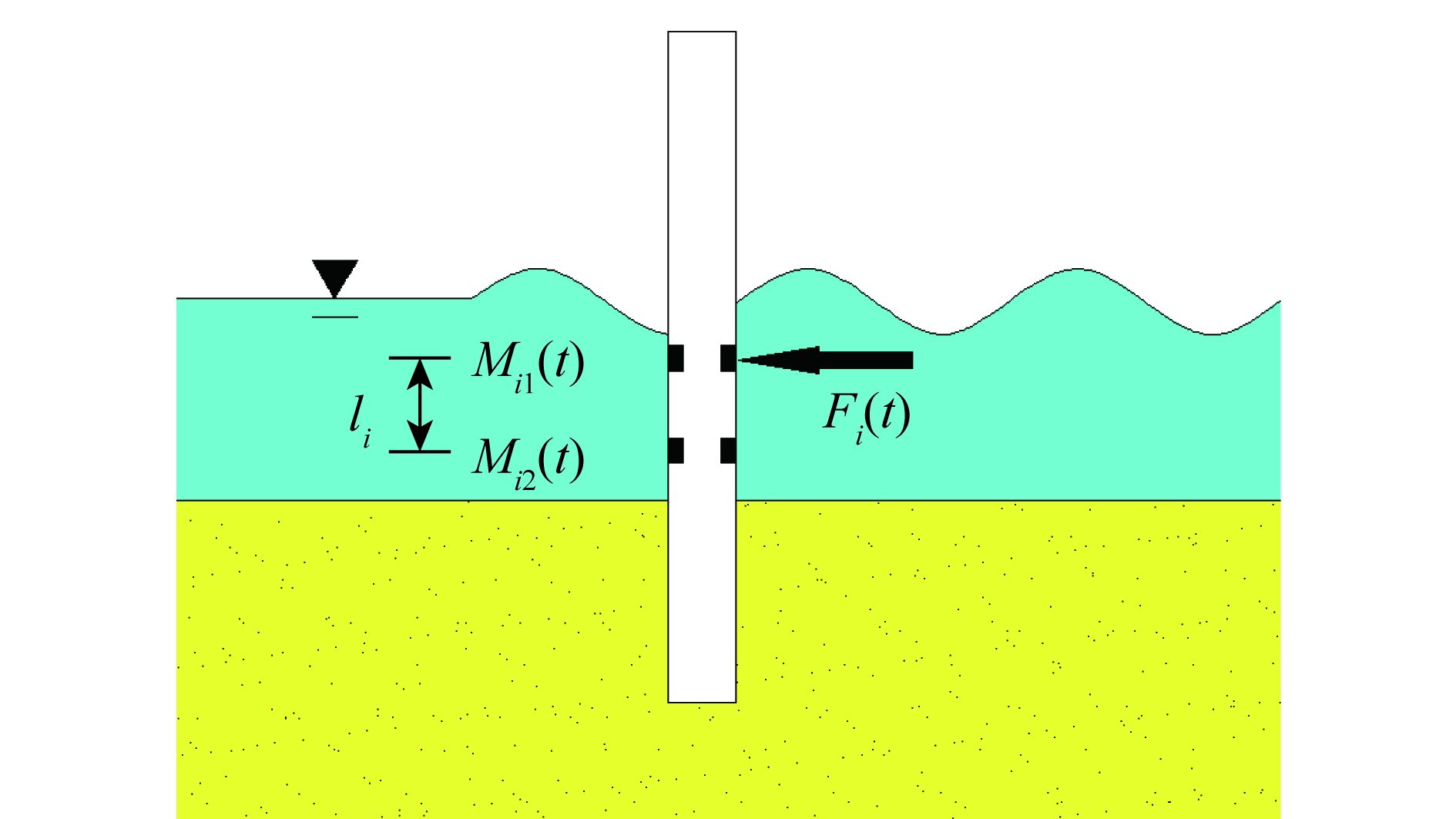
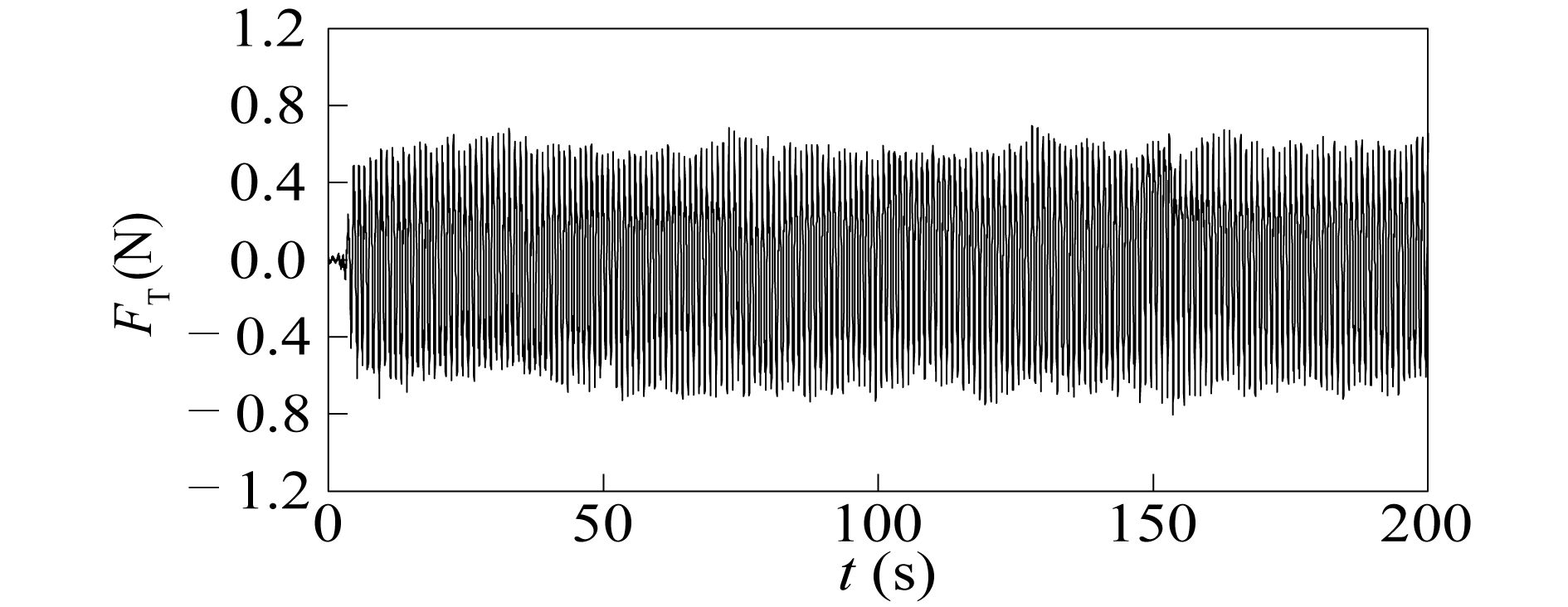
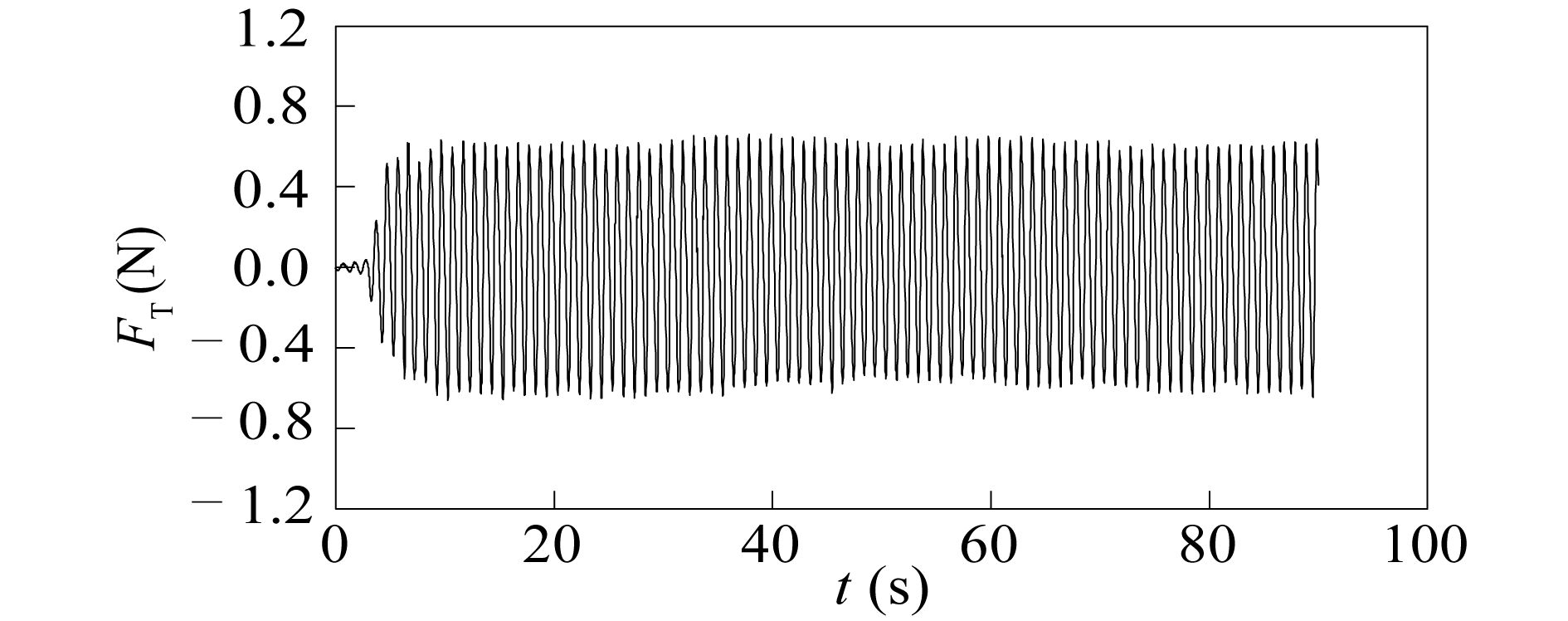
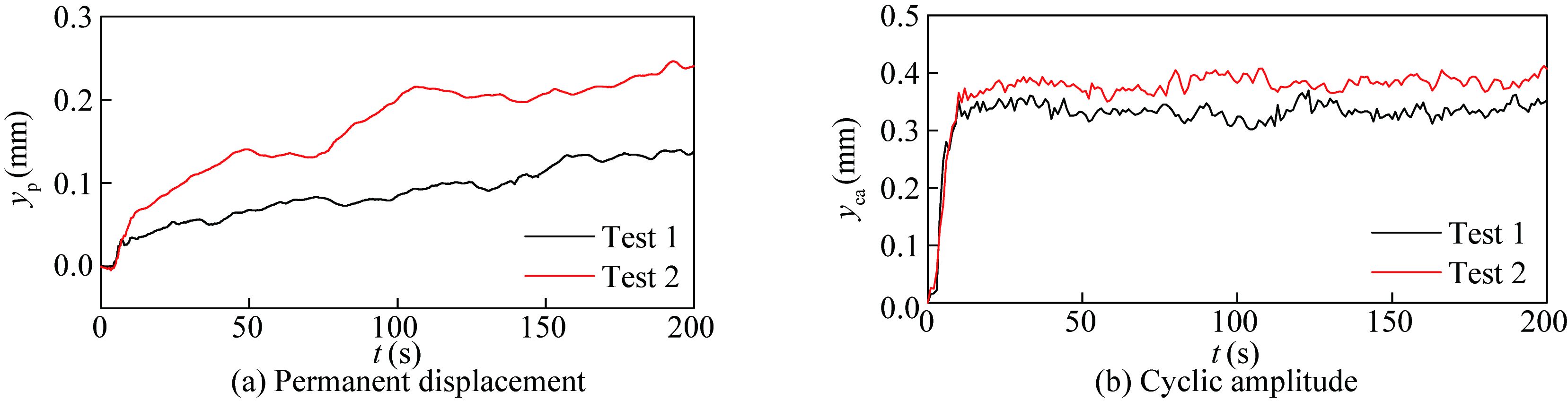
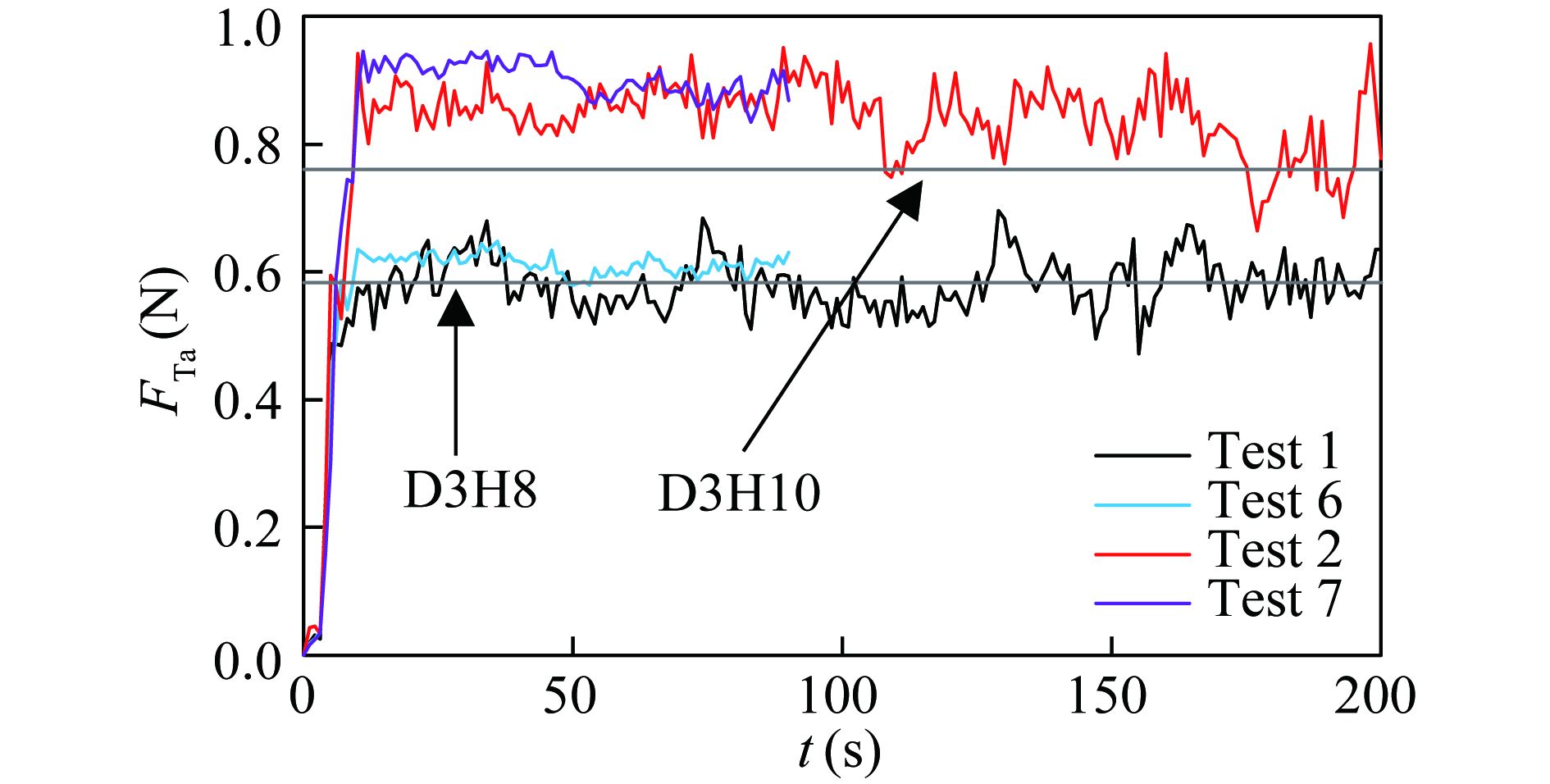
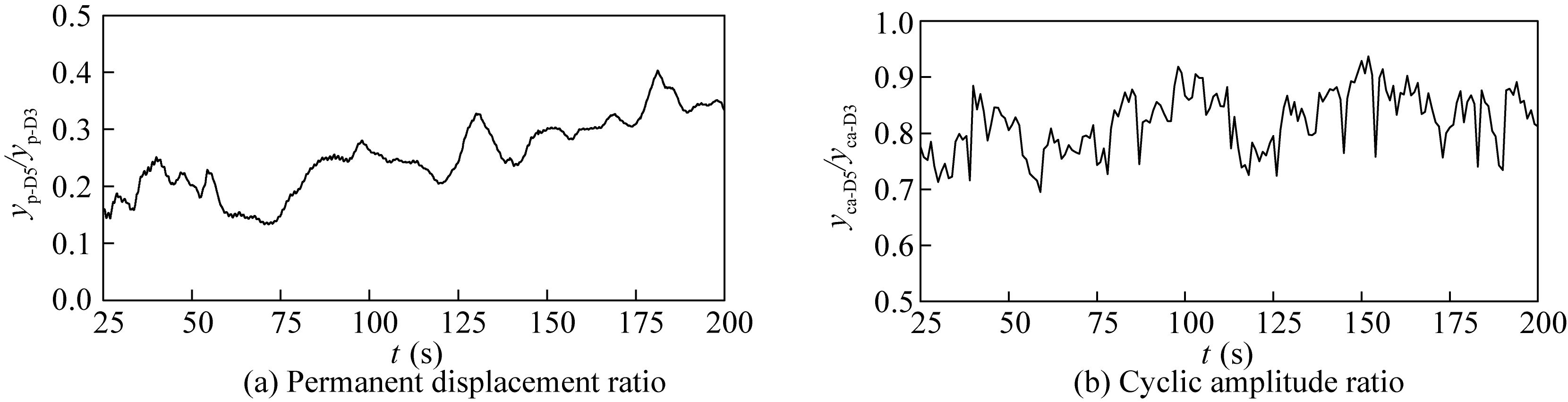
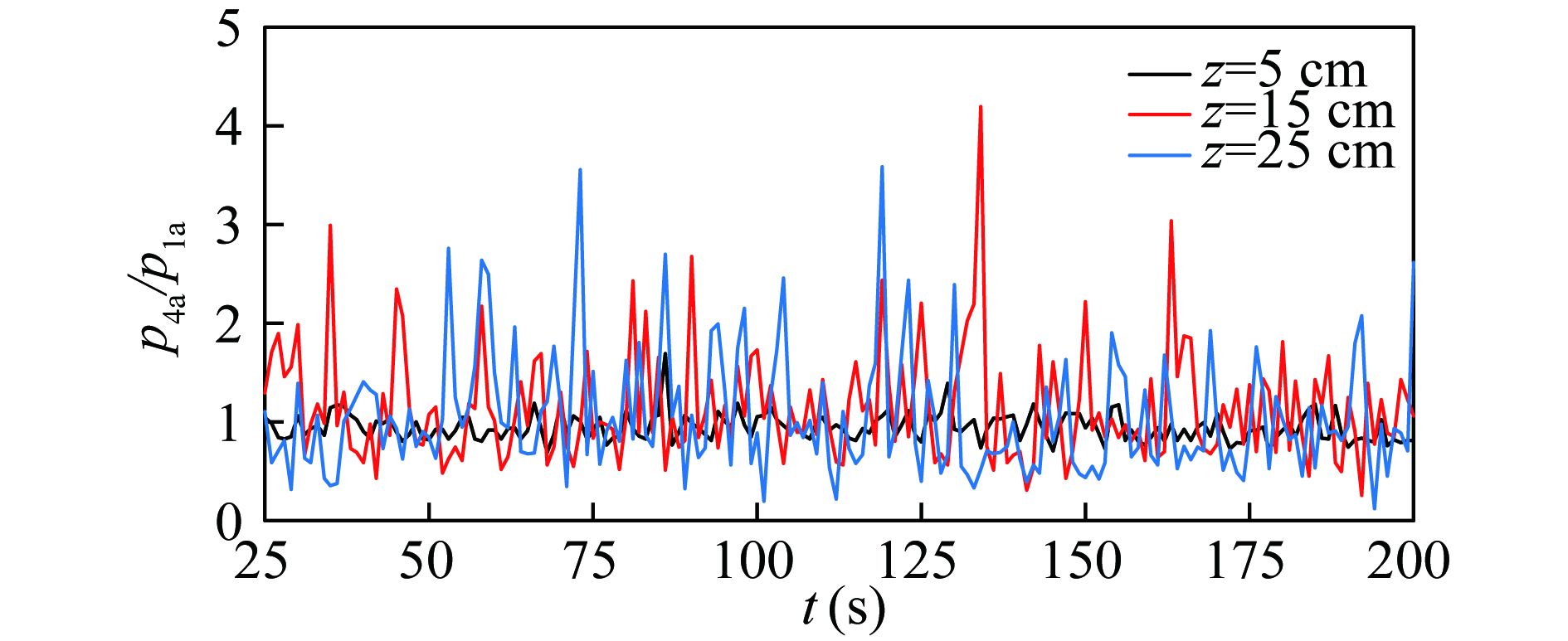
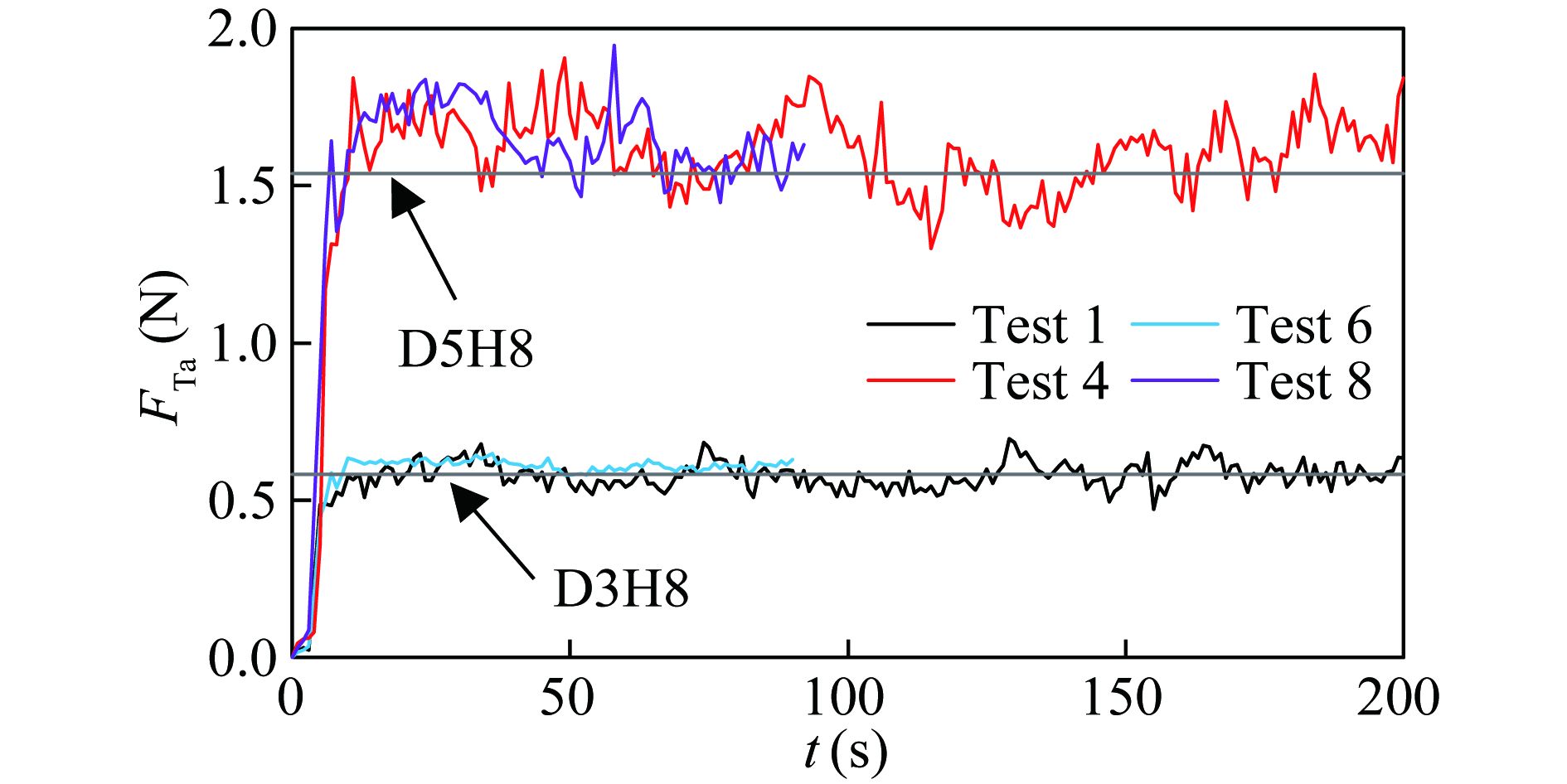
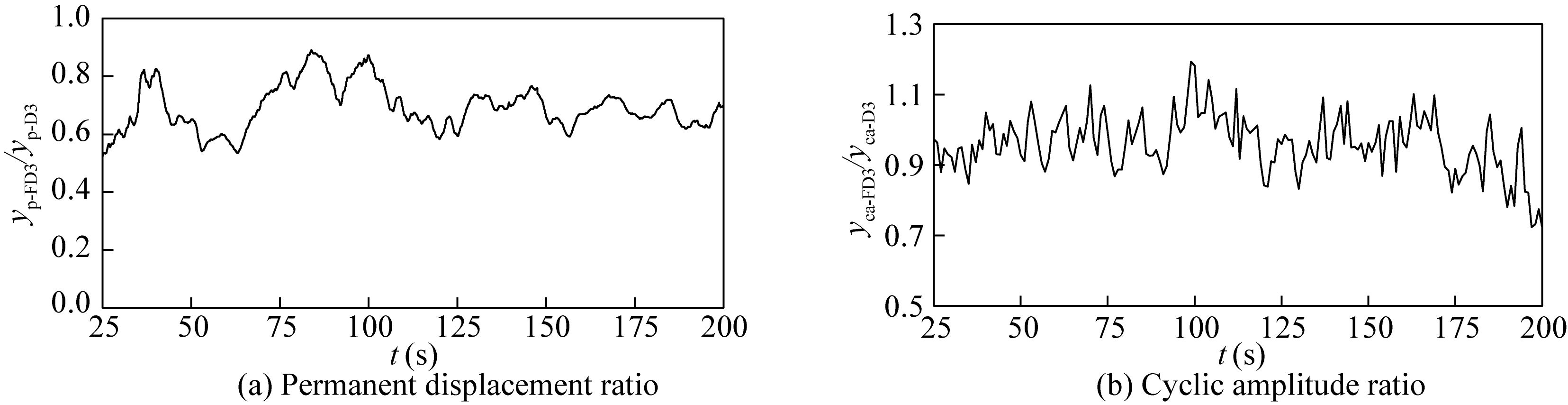
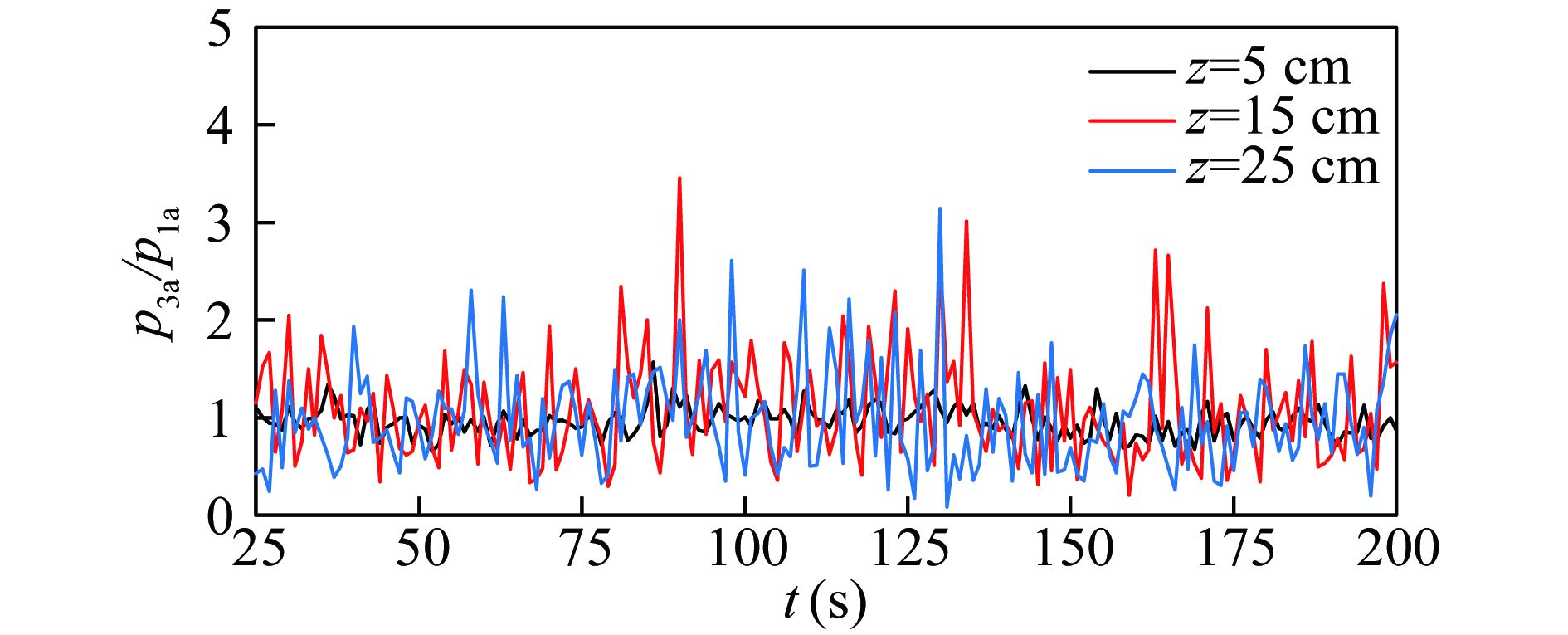
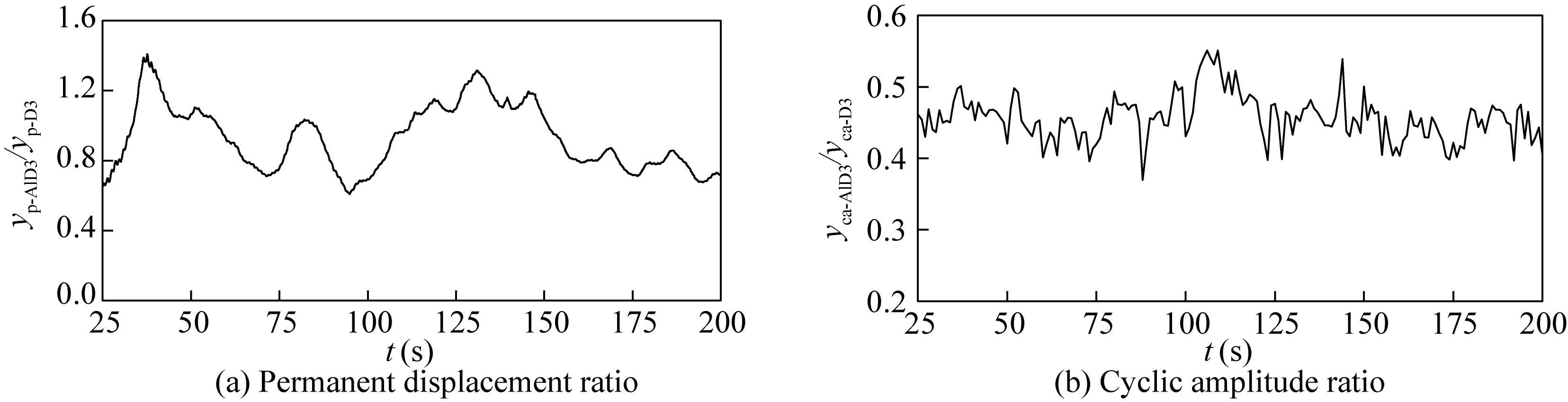
This paper presents an experimental study on the wave-induced behavior of monopiles. Laboratory experiments were conducted at the constant initial state of the sandy beds in a wave flume with a soil trench. The responses of the pile-head displacement, the pile strain and the pore water pressure on regular waves were investigated. The experimental results show that the monopiles lean along the direction of the wave progression and the inclination increases with the duration of wave actions. The pile-head displacement (consisting of the permanent displacement and cyclic displacement) increases as the wave height increases, especially more significantly for the permanent displacement. The head-fixed pile suffers from larger wave load than that on the head-free pile under the same wave condition. Increasing pile diameter or fixing fins on the monopile is effective in reducing the pore water pressure in the upper part of the bed and the permanent displacement.
This paper presents an experimental study on the wave-induced behavior of monopiles. Laboratory experiments were conducted at the constant initial state of the sandy beds in a wave flume with a soil trench. The responses of the pile-head displacement, the pile strain and the pore water pressure on regular waves were investigated. The experimental results show that the monopiles lean along the direction of the wave progression and the inclination increases with the duration of wave actions. The pile-head displacement (consisting of the permanent displacement and cyclic displacement) increases as the wave height increases, especially more significantly for the permanent displacement. The head-fixed pile suffers from larger wave load than that on the head-free pile under the same wave condition. Increasing pile diameter or fixing fins on the monopile is effective in reducing the pore water pressure in the upper part of the bed and the permanent displacement.




2017, 31(5): 618-623.
doi: 10.1007/s13344-017-0071-9
Abstract:
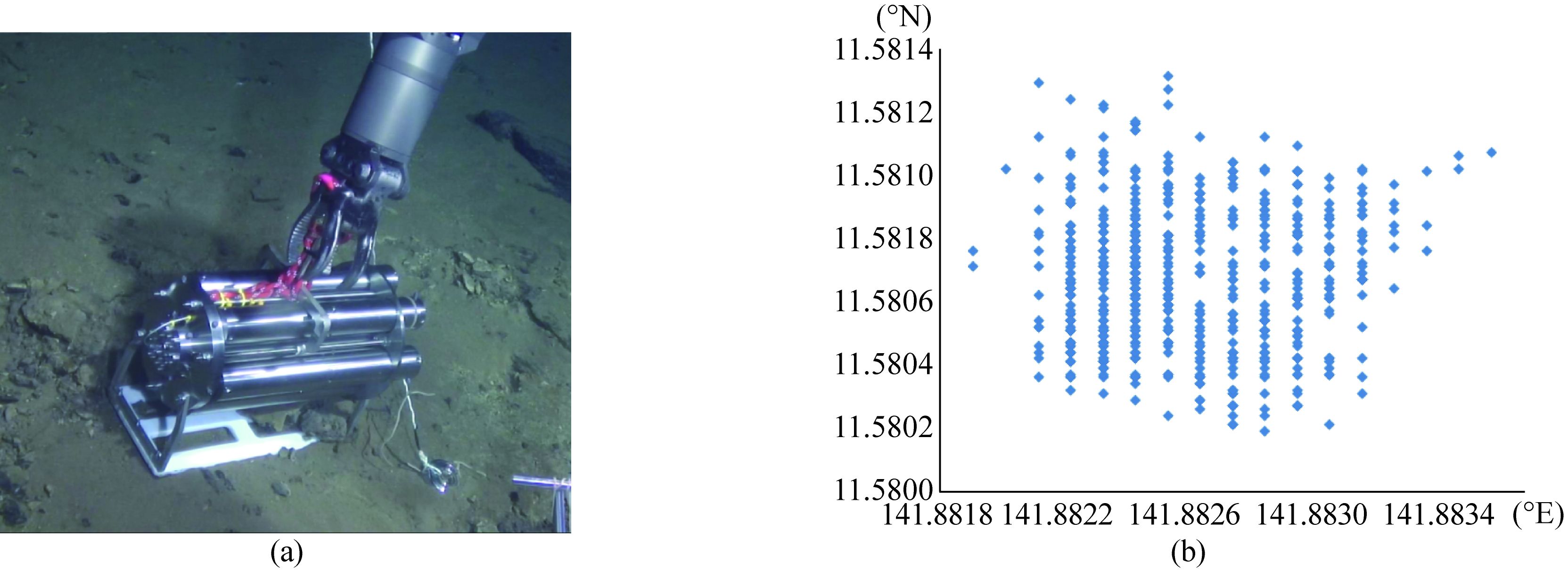
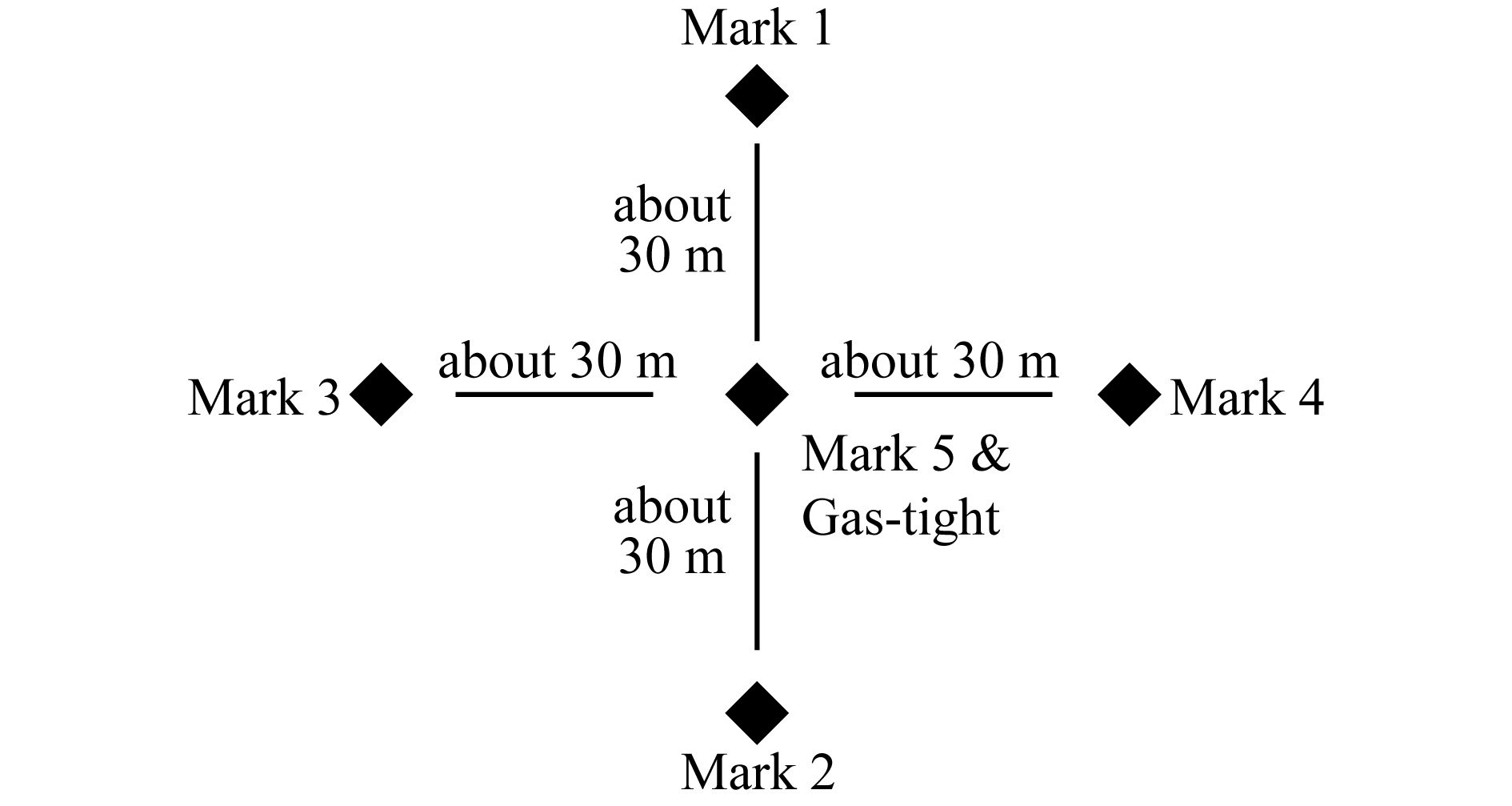
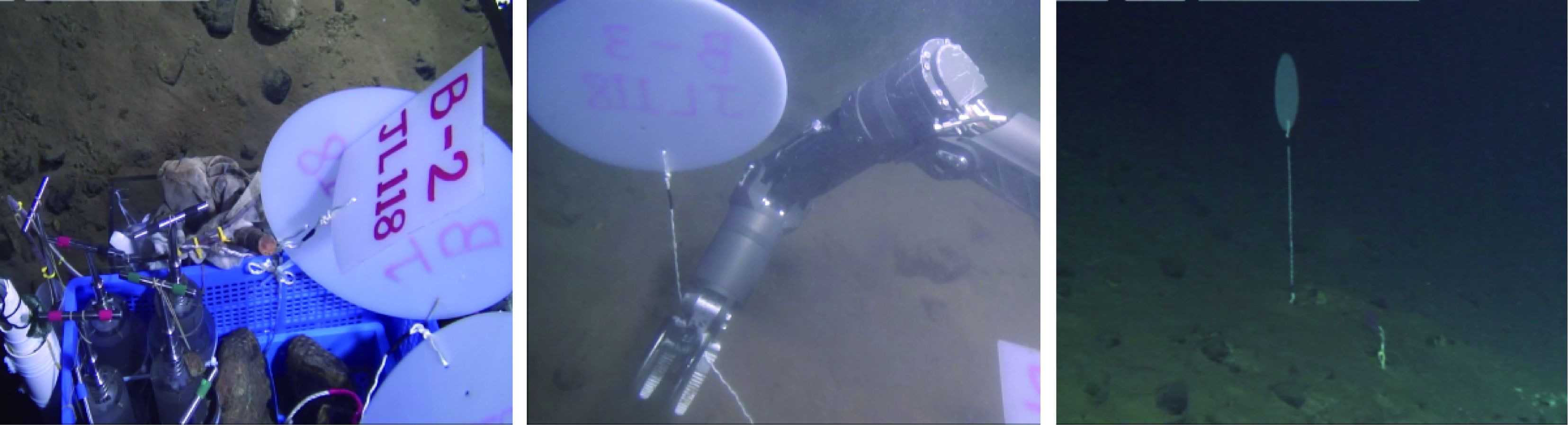
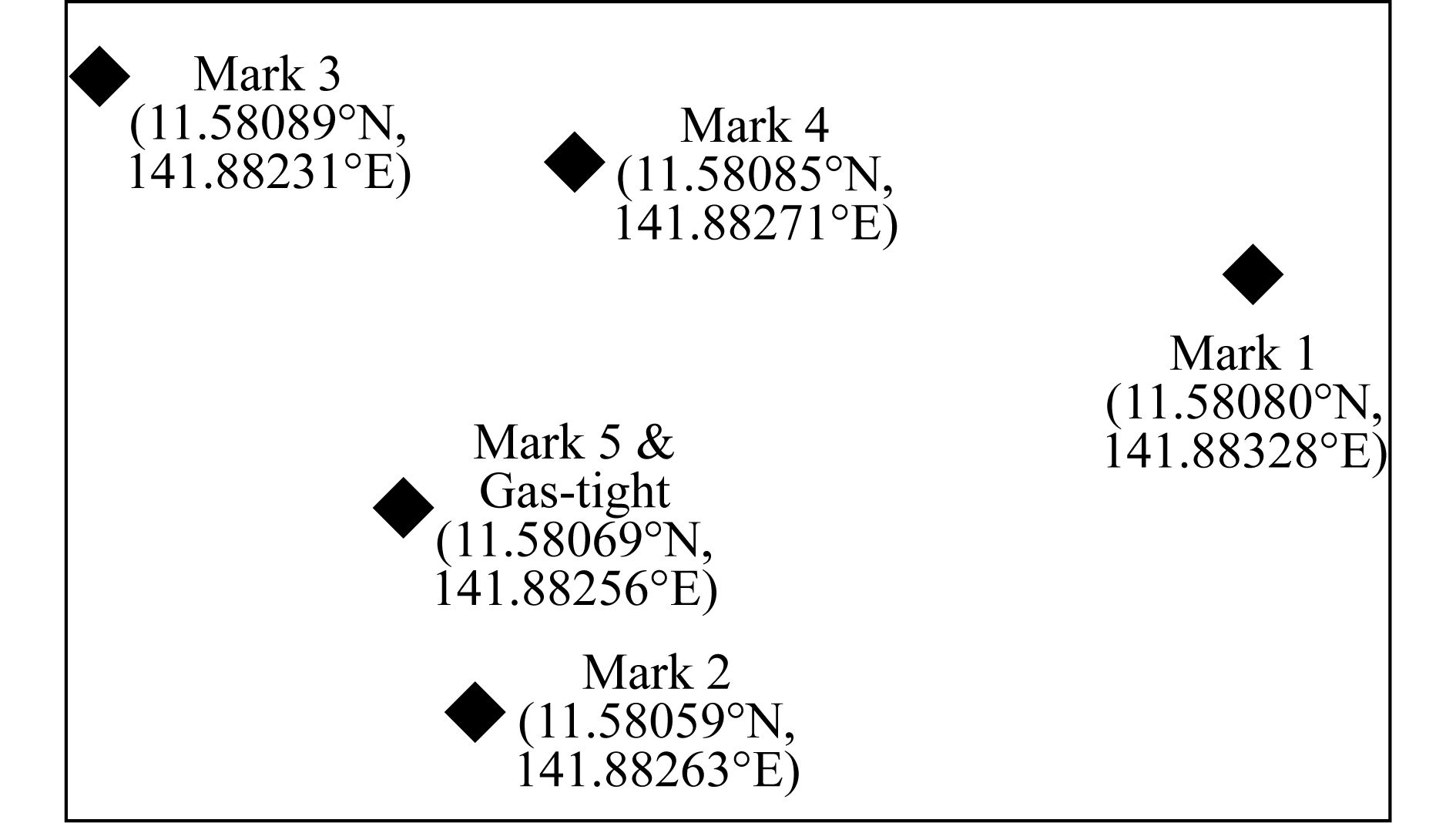
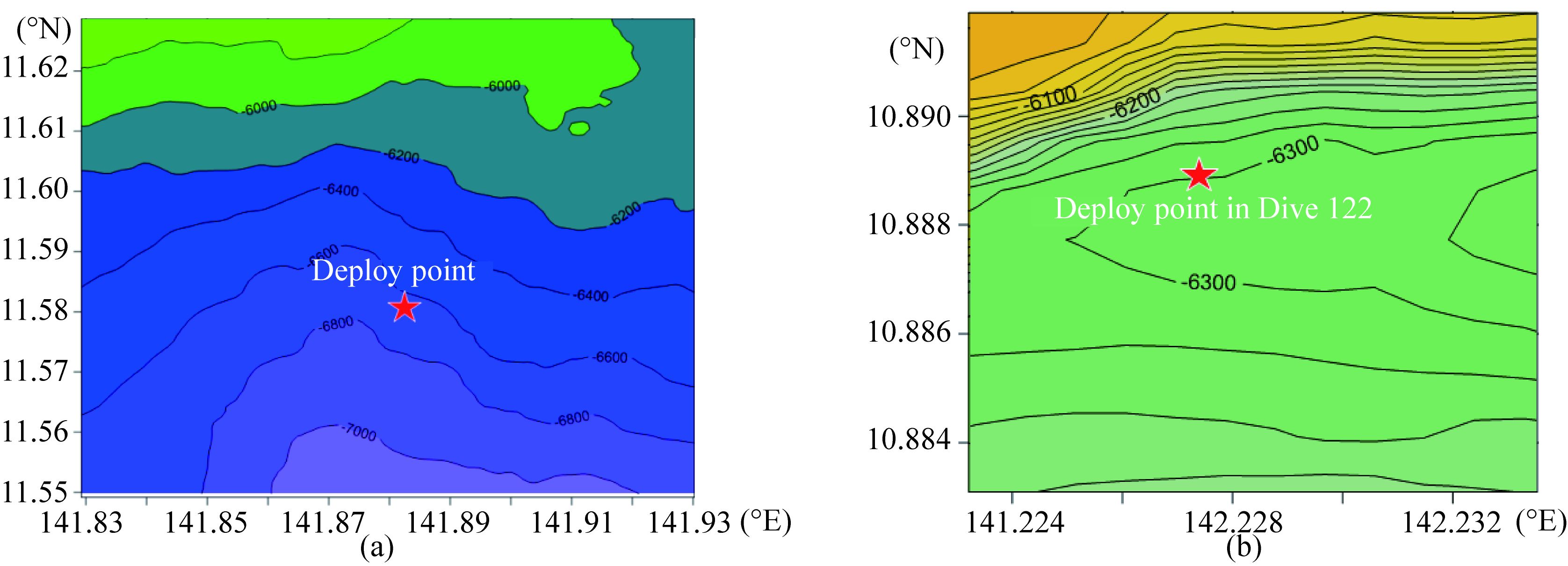
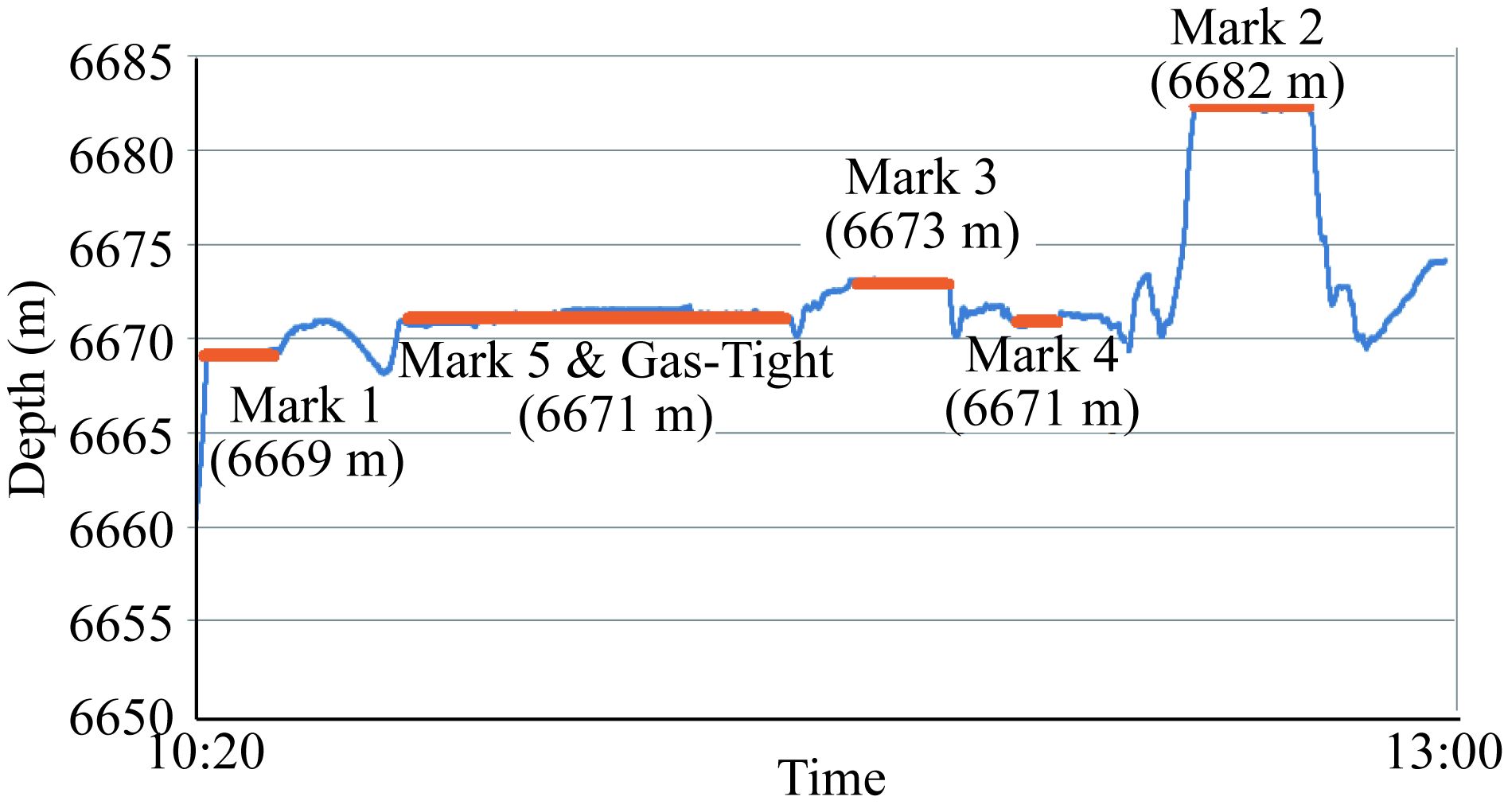
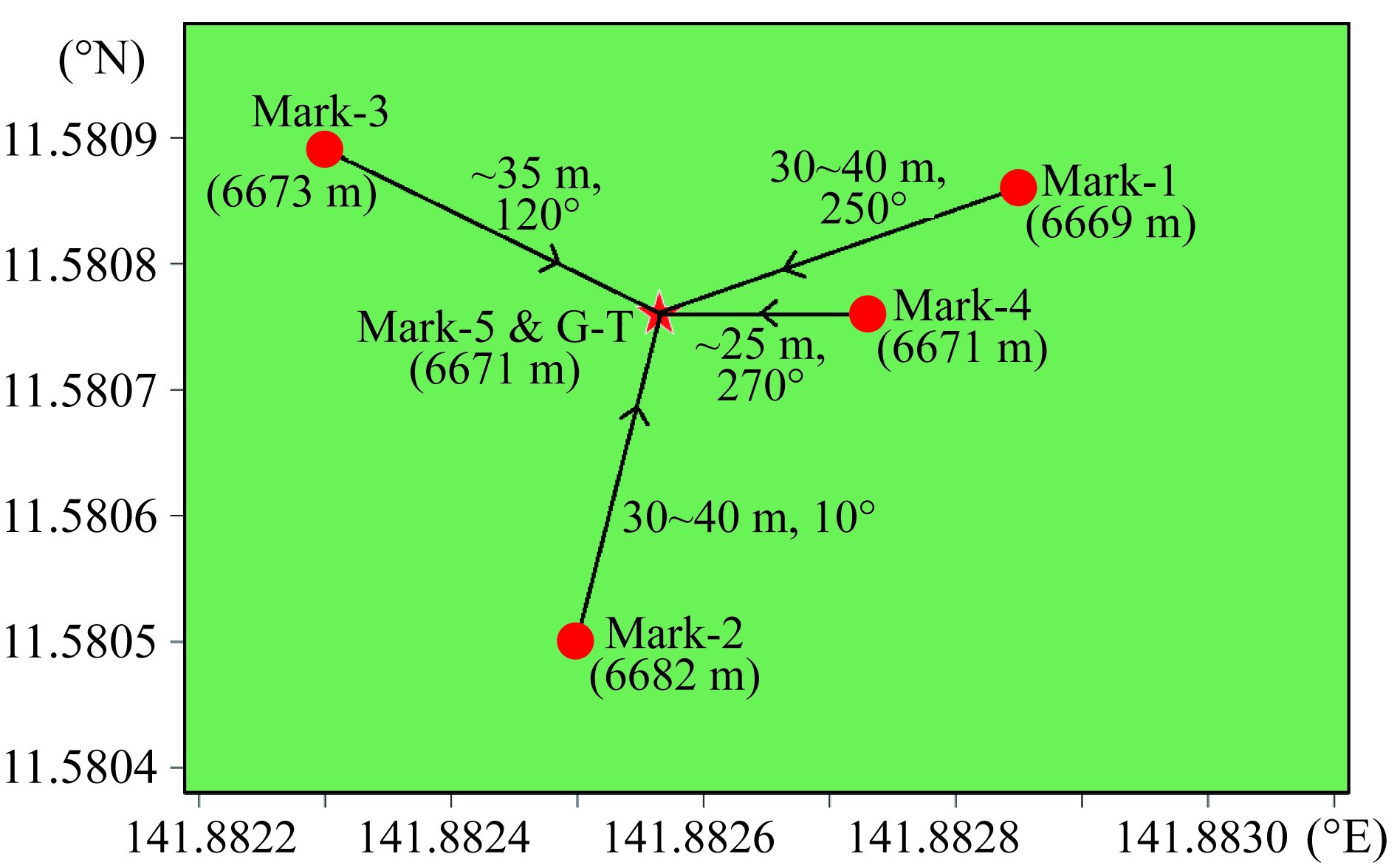
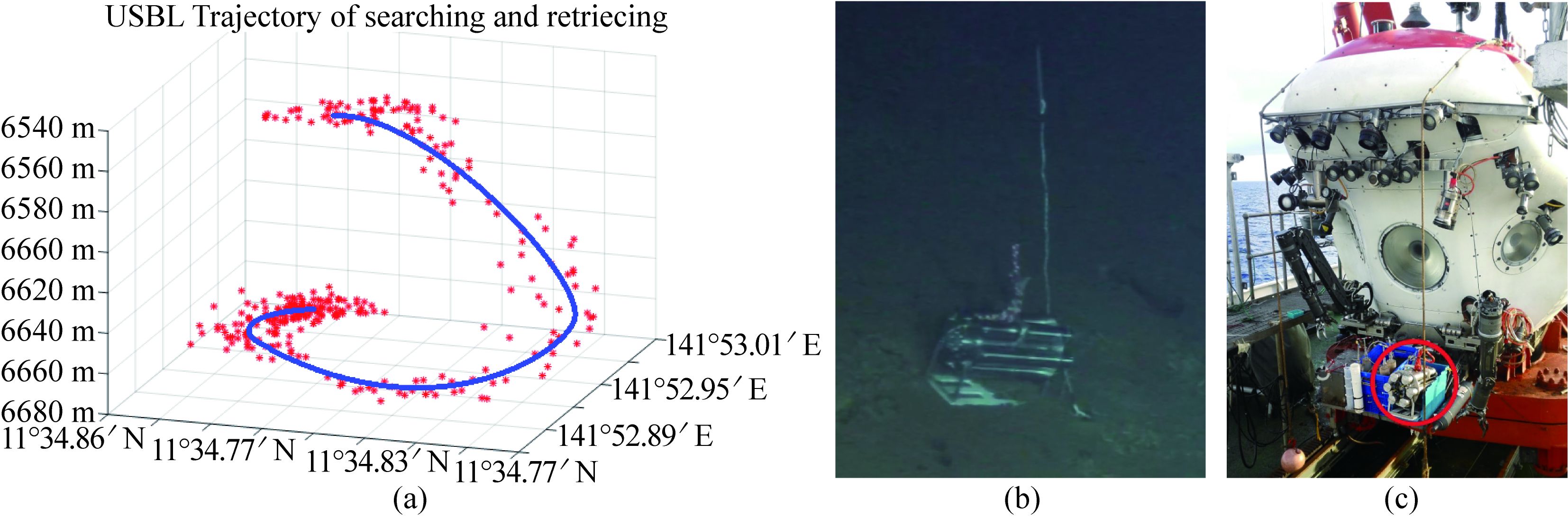
China’s 7000 m manned submersible JIAOLONG carried out an exploration cruise at the Mariana Trench from June to July 2016. The submersible completed nine manned dives on the north and south area of the Mariana Trench from the depth of 5500 to 6700 m, to investigate the geological, biological and chemical characteristics in the hadal area. During the cruise, JIAOLONG deployed a gas-tight serial sampler to collect the water near the sea bottom regularly. Five days later, the sub located the sampler in another dive and retrieved it successfully from the same location, which is the first time that scientists and engineers finished the high accuracy in-situ deployment and retrieval using a manned submersible with Ultra-Short Base Line (USBL) positioning system at the depth more than 6600 m. In this task, we used not only the USBL system of the manned submersible but also a compound strategy, including five position marks, the sea floor terrain, the depth contour, and the heading of the sub. This paper introduces the compound strategy of the target deployment and retrieval with the practical diving experience of JIAOLONG, and provides a promising technique for other underwater vehicles such as manned submersible or Remote Operated Vehicle (ROV) under similar conditions.
China’s 7000 m manned submersible JIAOLONG carried out an exploration cruise at the Mariana Trench from June to July 2016. The submersible completed nine manned dives on the north and south area of the Mariana Trench from the depth of 5500 to 6700 m, to investigate the geological, biological and chemical characteristics in the hadal area. During the cruise, JIAOLONG deployed a gas-tight serial sampler to collect the water near the sea bottom regularly. Five days later, the sub located the sampler in another dive and retrieved it successfully from the same location, which is the first time that scientists and engineers finished the high accuracy in-situ deployment and retrieval using a manned submersible with Ultra-Short Base Line (USBL) positioning system at the depth more than 6600 m. In this task, we used not only the USBL system of the manned submersible but also a compound strategy, including five position marks, the sea floor terrain, the depth contour, and the heading of the sub. This paper introduces the compound strategy of the target deployment and retrieval with the practical diving experience of JIAOLONG, and provides a promising technique for other underwater vehicles such as manned submersible or Remote Operated Vehicle (ROV) under similar conditions.
2017, 31(5): 624-630.
doi: 10.1007/s13344-017-0072-8
Abstract:
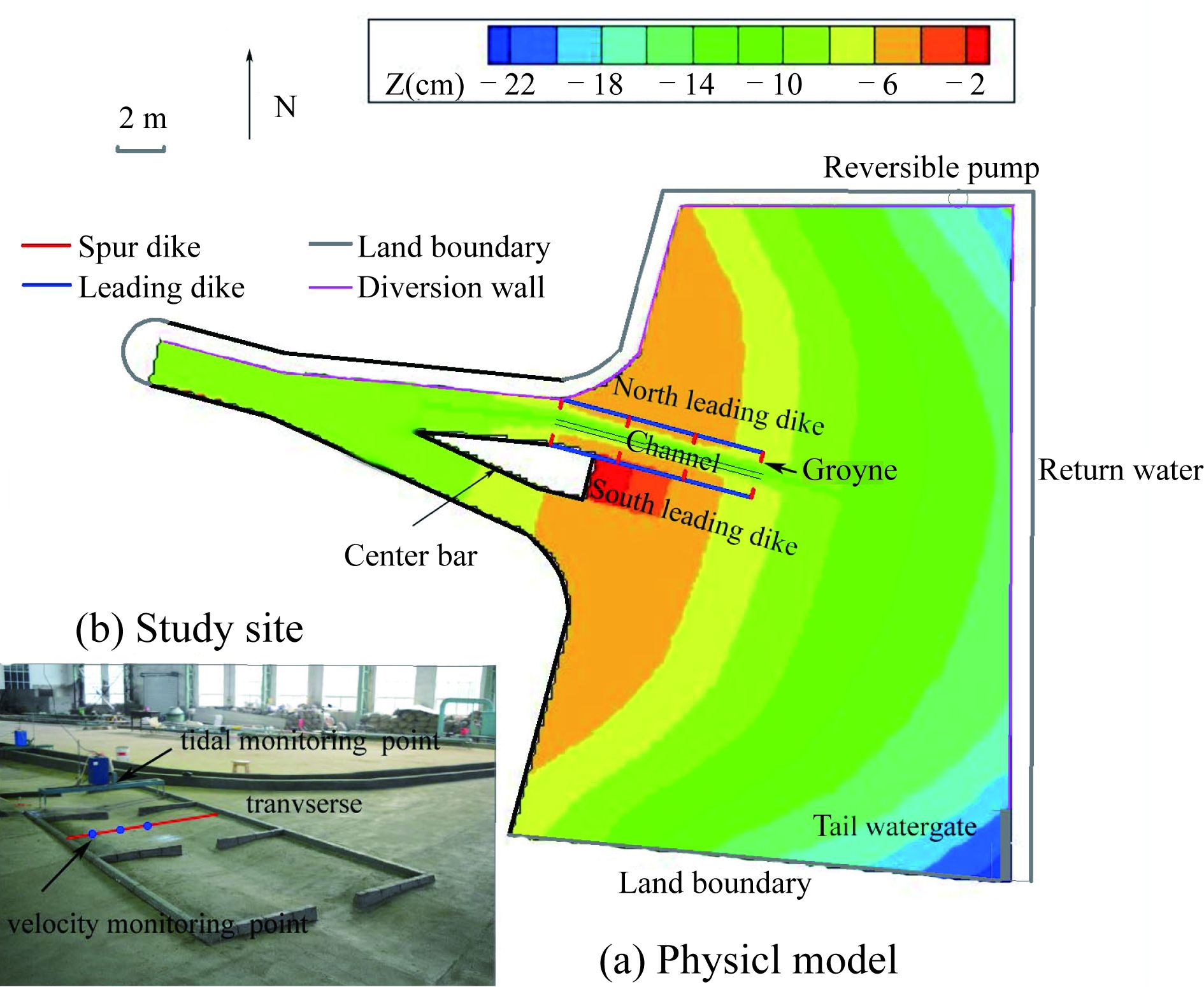
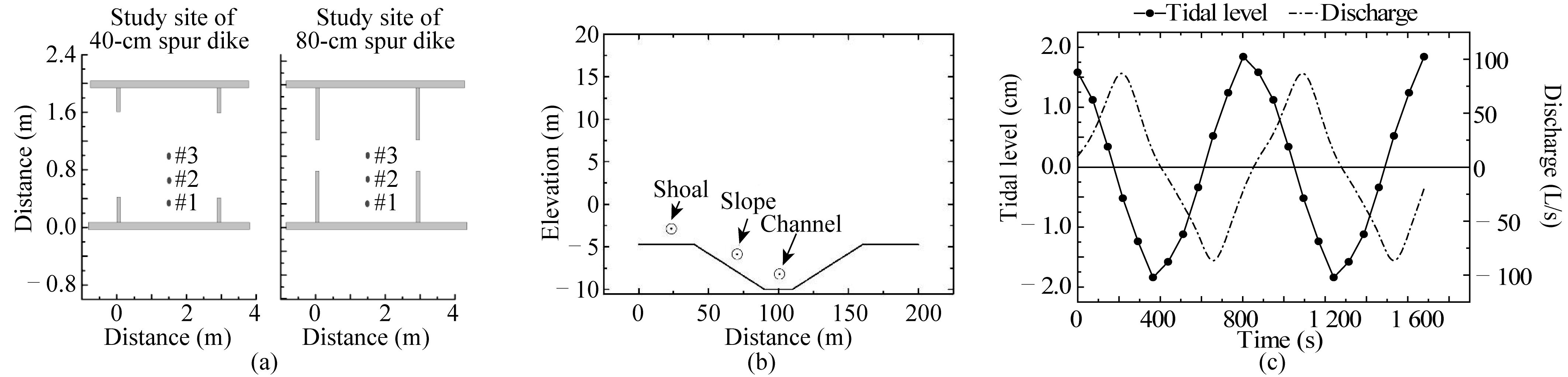
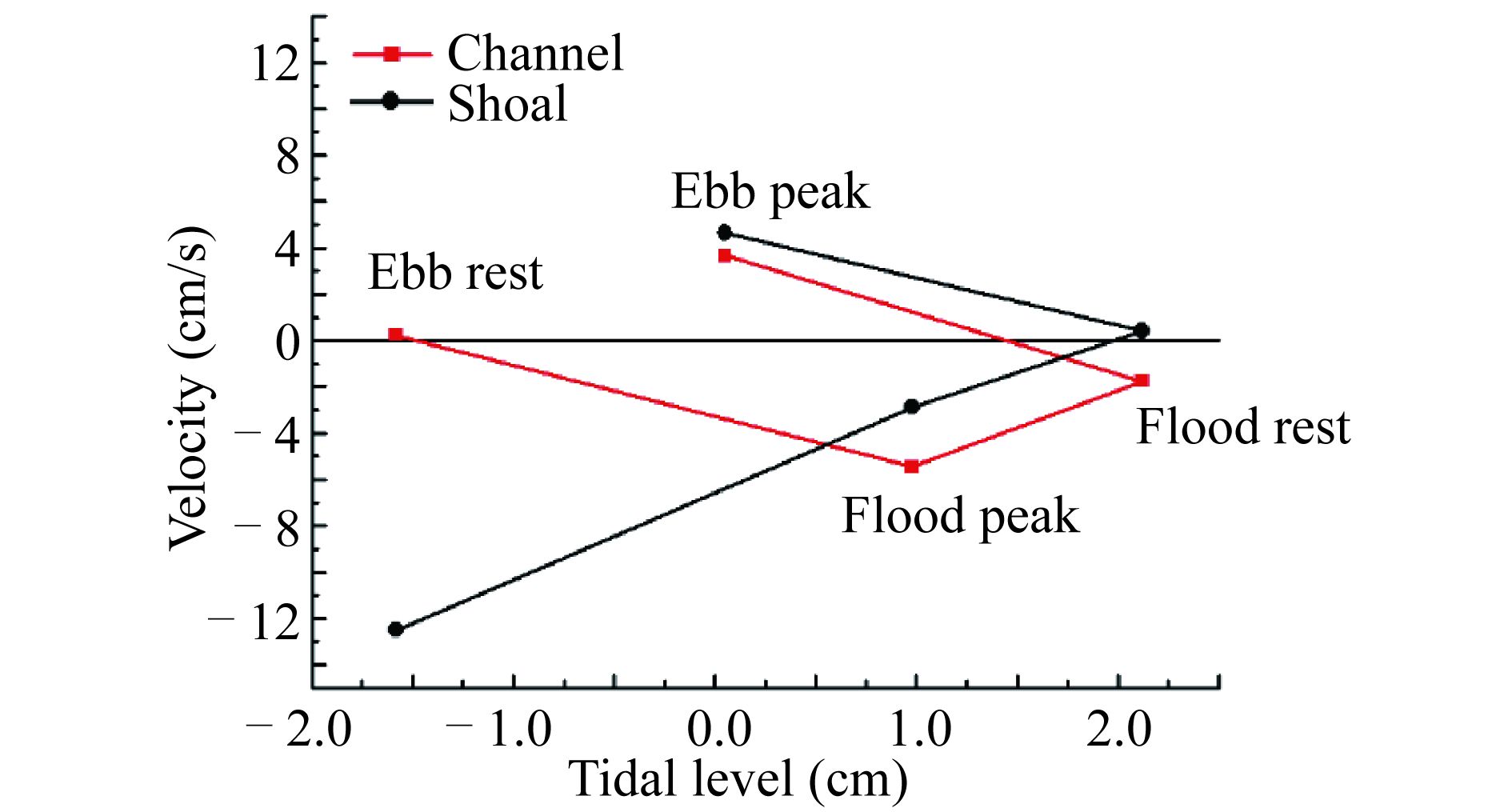
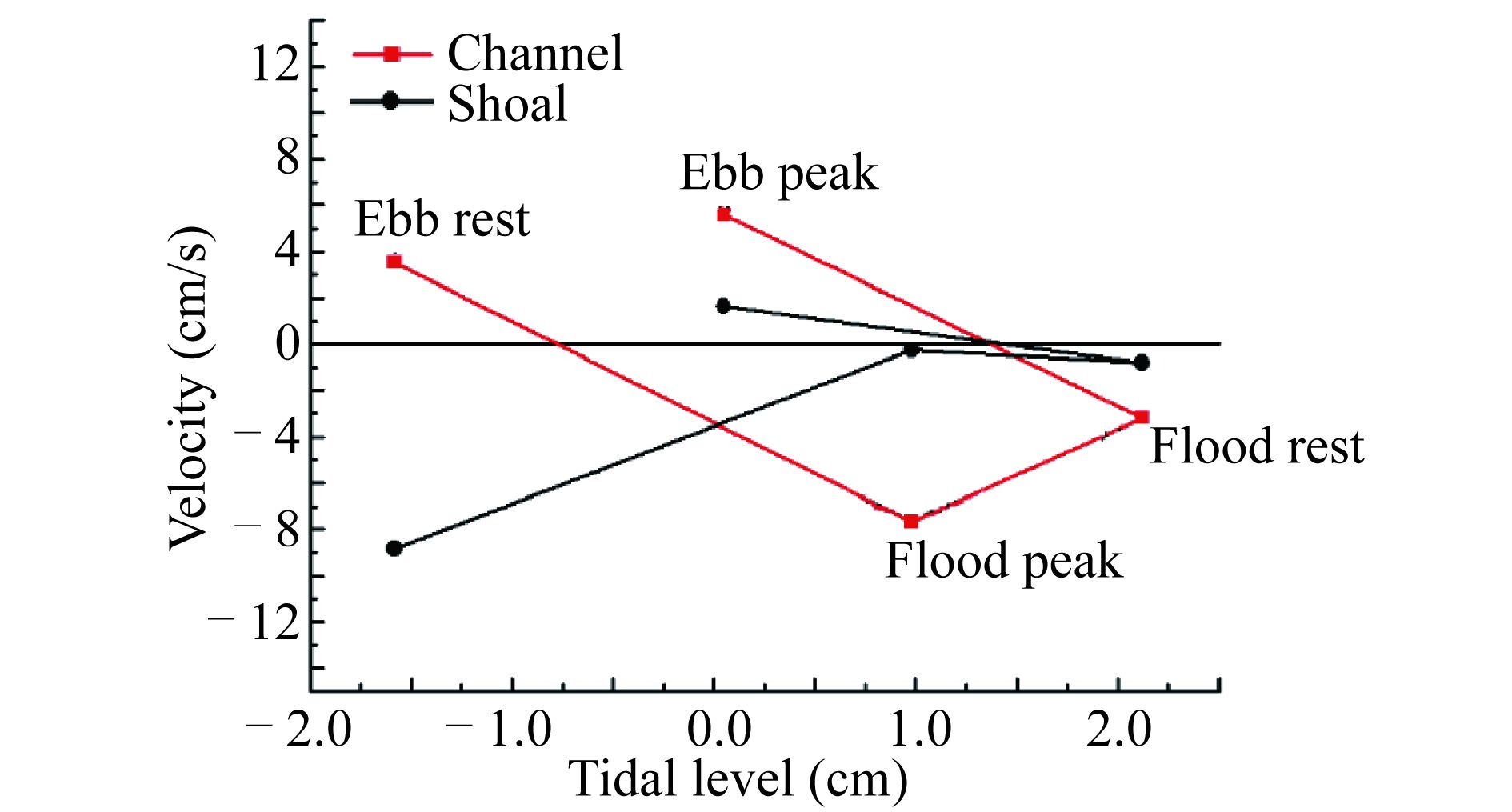
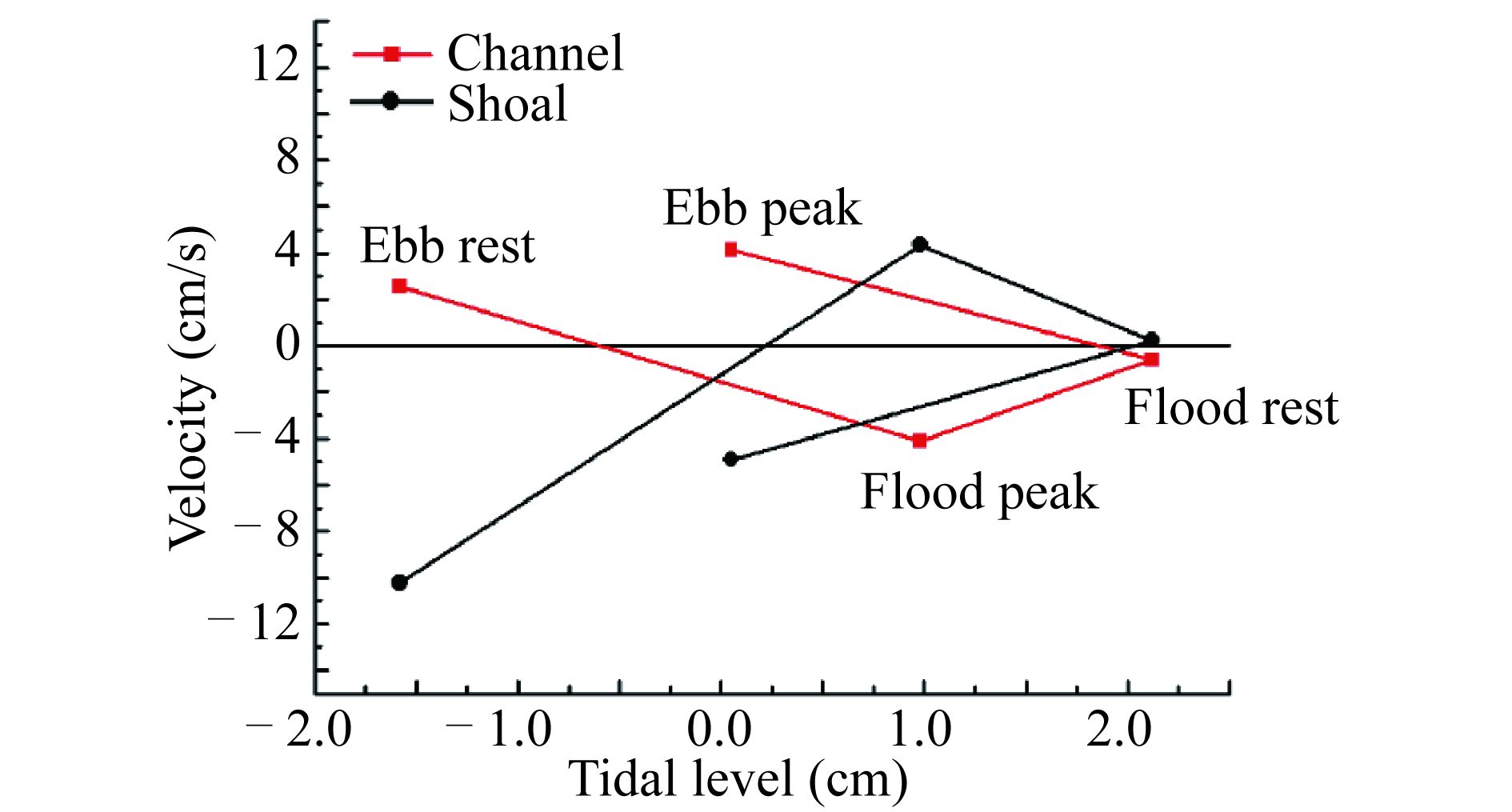
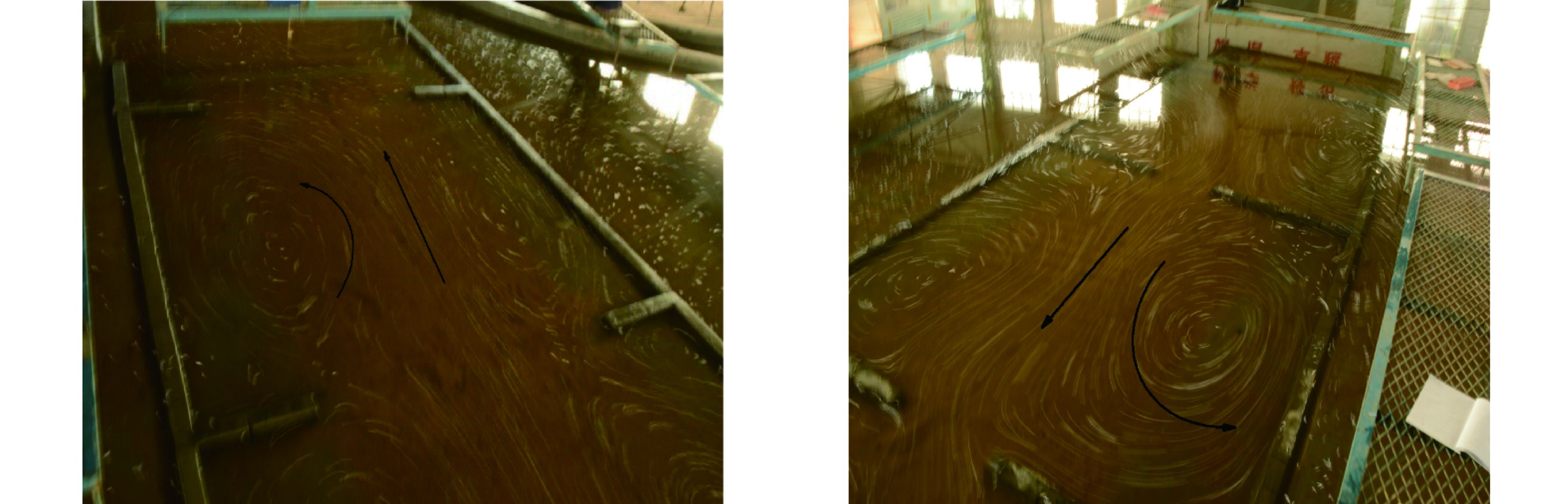
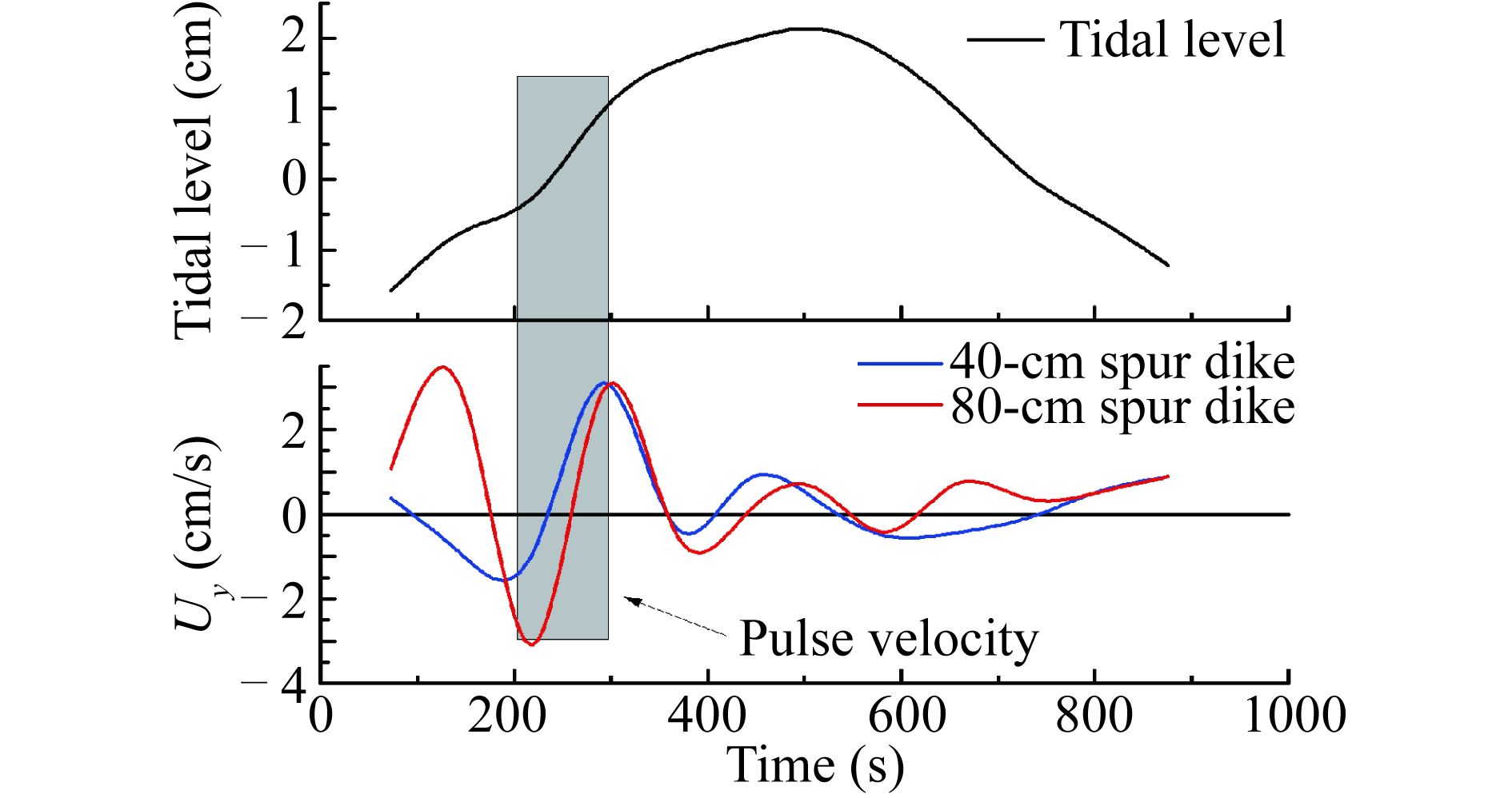
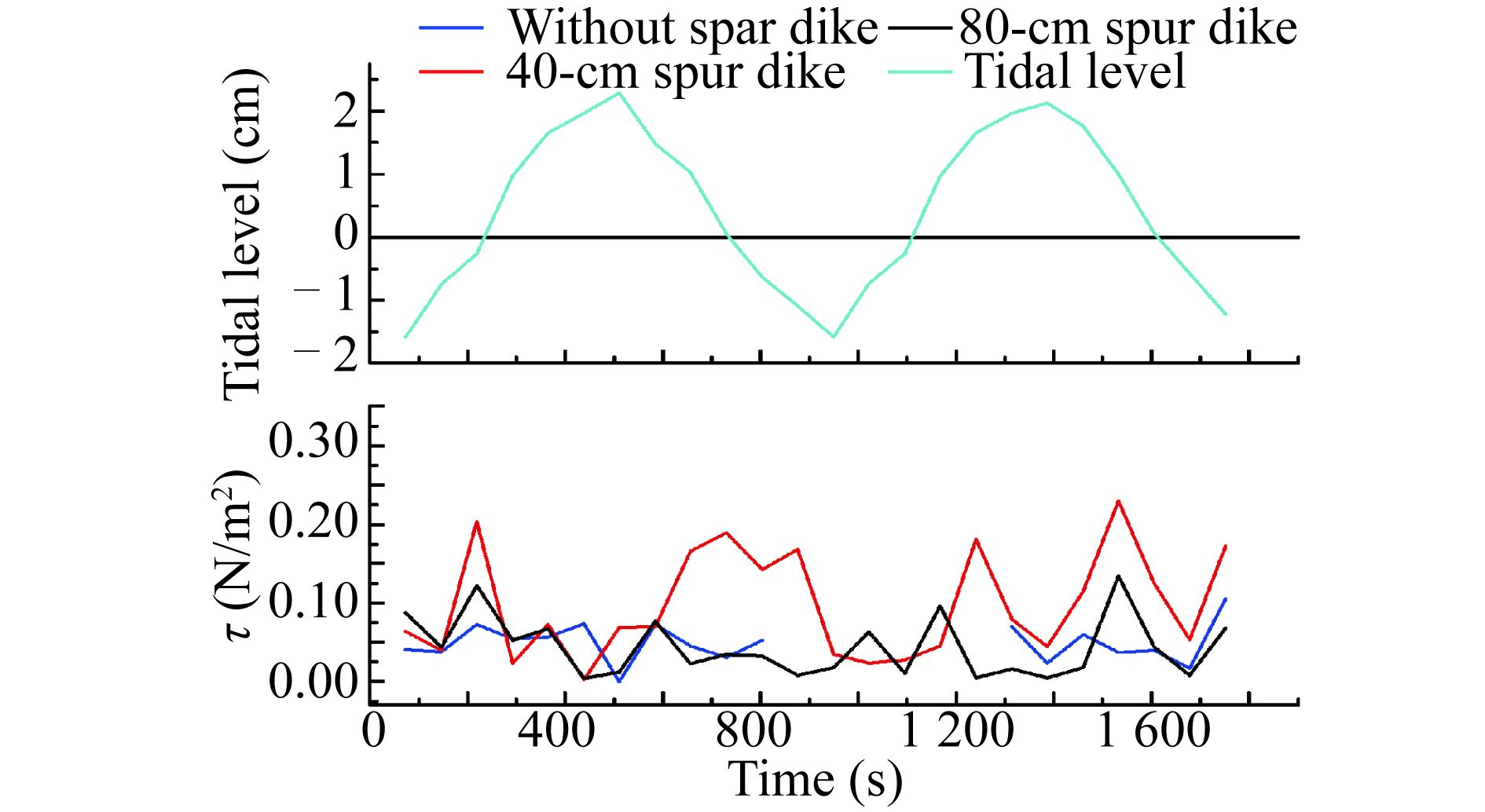
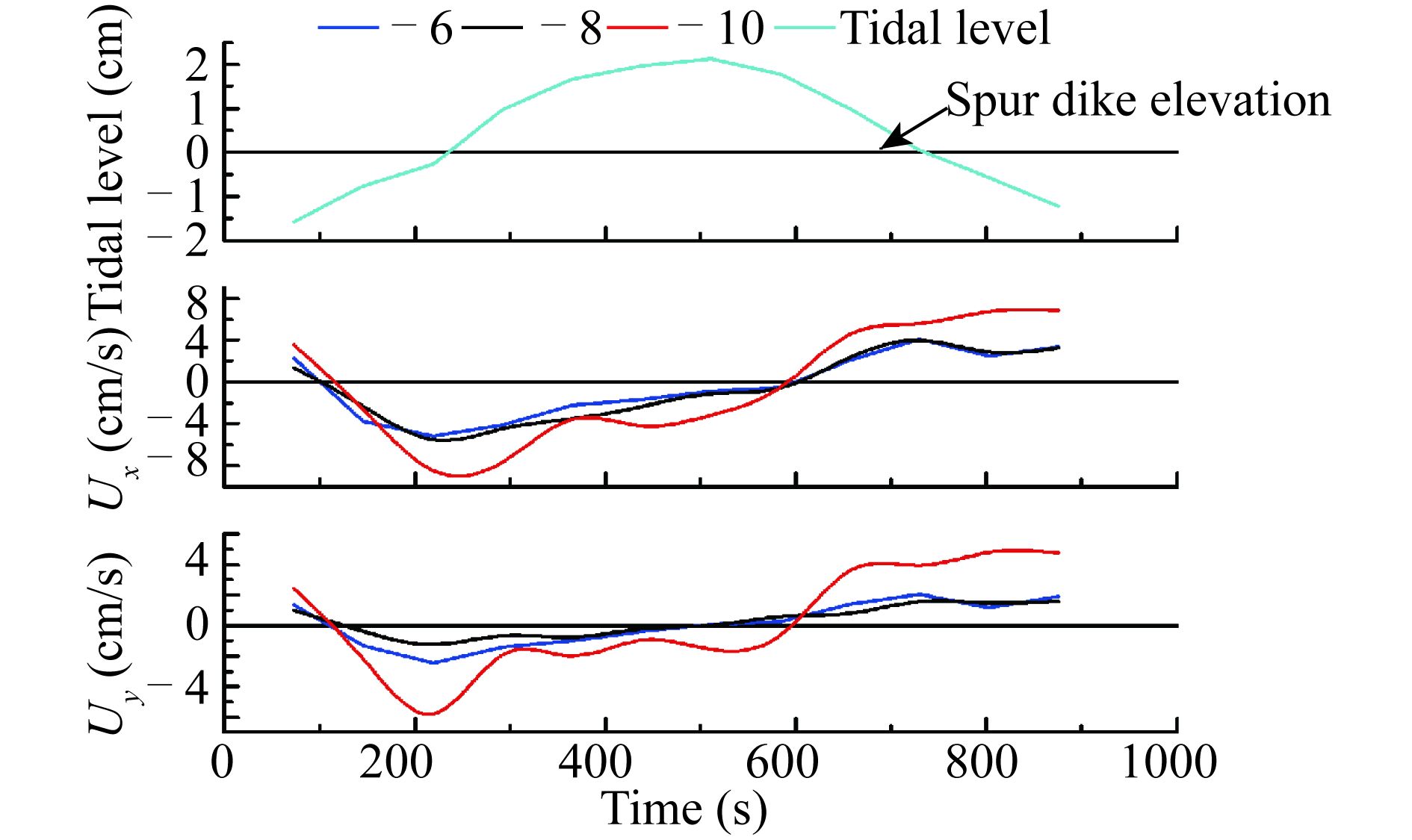
Widely applied in maintaining estuarial waterway depth, the spur dike has played an important role in currents and sediment exchange between channel and shoal and sediment back-silting in the channel. Through establishing a generalized physical model at a bifurcated estuary and conducting current tests under the joint action of runoff and tide, the influence of the spur dike length on current exchange between channel and shoal is analyzed. Results show that when the spur dike length reaches a certain value, the direction of the flow velocity shear front between the channel and shoal will change. The longer the spur dike, the larger the transverse fluctuating velocity at the peak of flood in the channel shoal exchange area, while the transport of the transverse hydrodynamics is obvious in the process of flood. There is an optimum length of spur dike when the shear stress in the channel and the longitudinal velocity in flood and ebb reach the maximum, and the flow velocity will decrease when the spur dike length is smaller or larger than the optimum. For a certain length of spur dike, the larger the channel shoal elevation difference, the larger the peak longitudinal flow velocity in the middle of the navigation channel in flood and ebb. However, the transverse flow velocity will first decrease and then increase. The transverse transportation is obvious when the channel shoal elevation difference increases.
Widely applied in maintaining estuarial waterway depth, the spur dike has played an important role in currents and sediment exchange between channel and shoal and sediment back-silting in the channel. Through establishing a generalized physical model at a bifurcated estuary and conducting current tests under the joint action of runoff and tide, the influence of the spur dike length on current exchange between channel and shoal is analyzed. Results show that when the spur dike length reaches a certain value, the direction of the flow velocity shear front between the channel and shoal will change. The longer the spur dike, the larger the transverse fluctuating velocity at the peak of flood in the channel shoal exchange area, while the transport of the transverse hydrodynamics is obvious in the process of flood. There is an optimum length of spur dike when the shear stress in the channel and the longitudinal velocity in flood and ebb reach the maximum, and the flow velocity will decrease when the spur dike length is smaller or larger than the optimum. For a certain length of spur dike, the larger the channel shoal elevation difference, the larger the peak longitudinal flow velocity in the middle of the navigation channel in flood and ebb. However, the transverse flow velocity will first decrease and then increase. The transverse transportation is obvious when the channel shoal elevation difference increases.
2017, 31(5): 631-638.
doi: 10.1007/s13344-017-0067-5
Abstract:
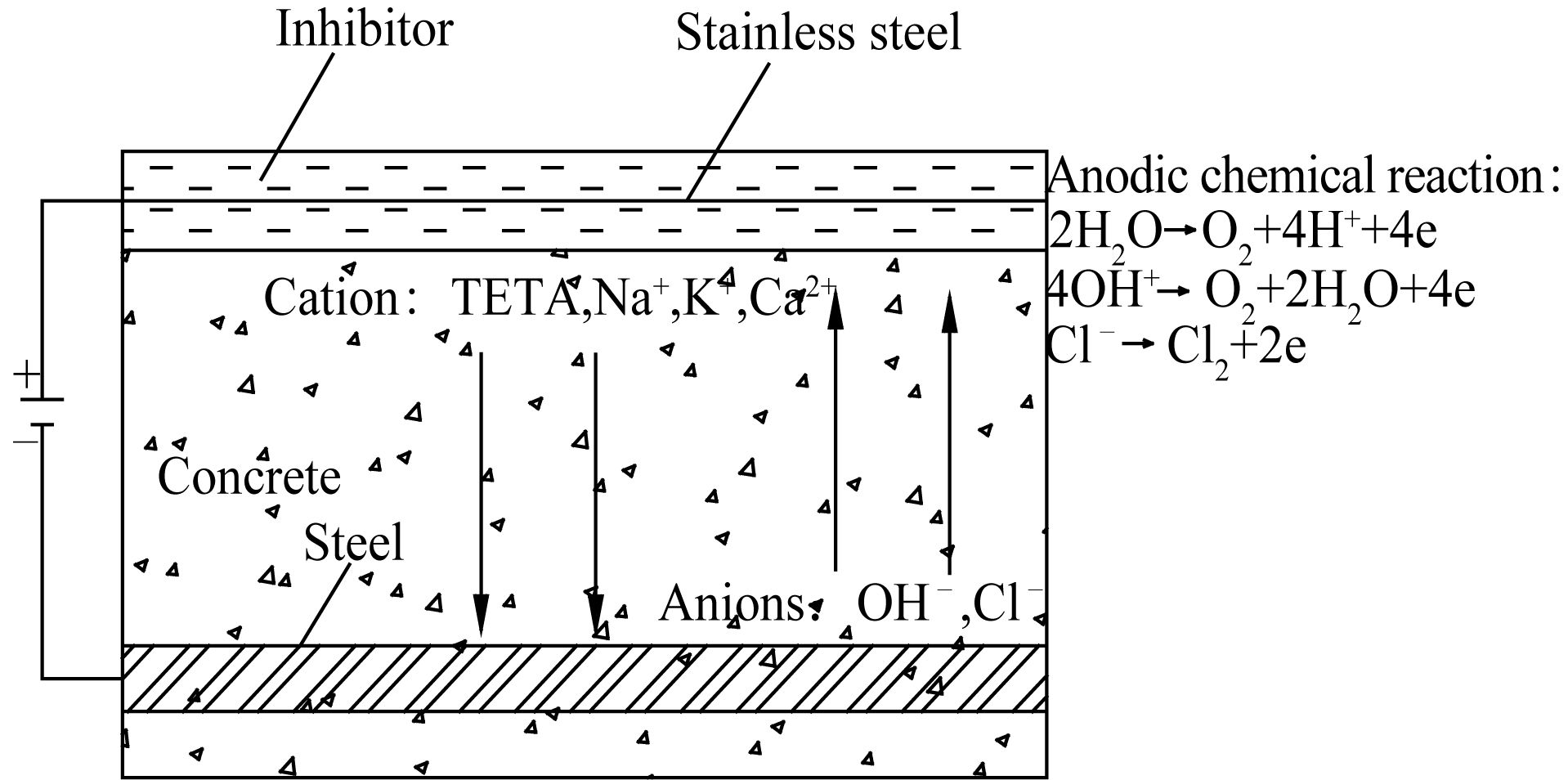
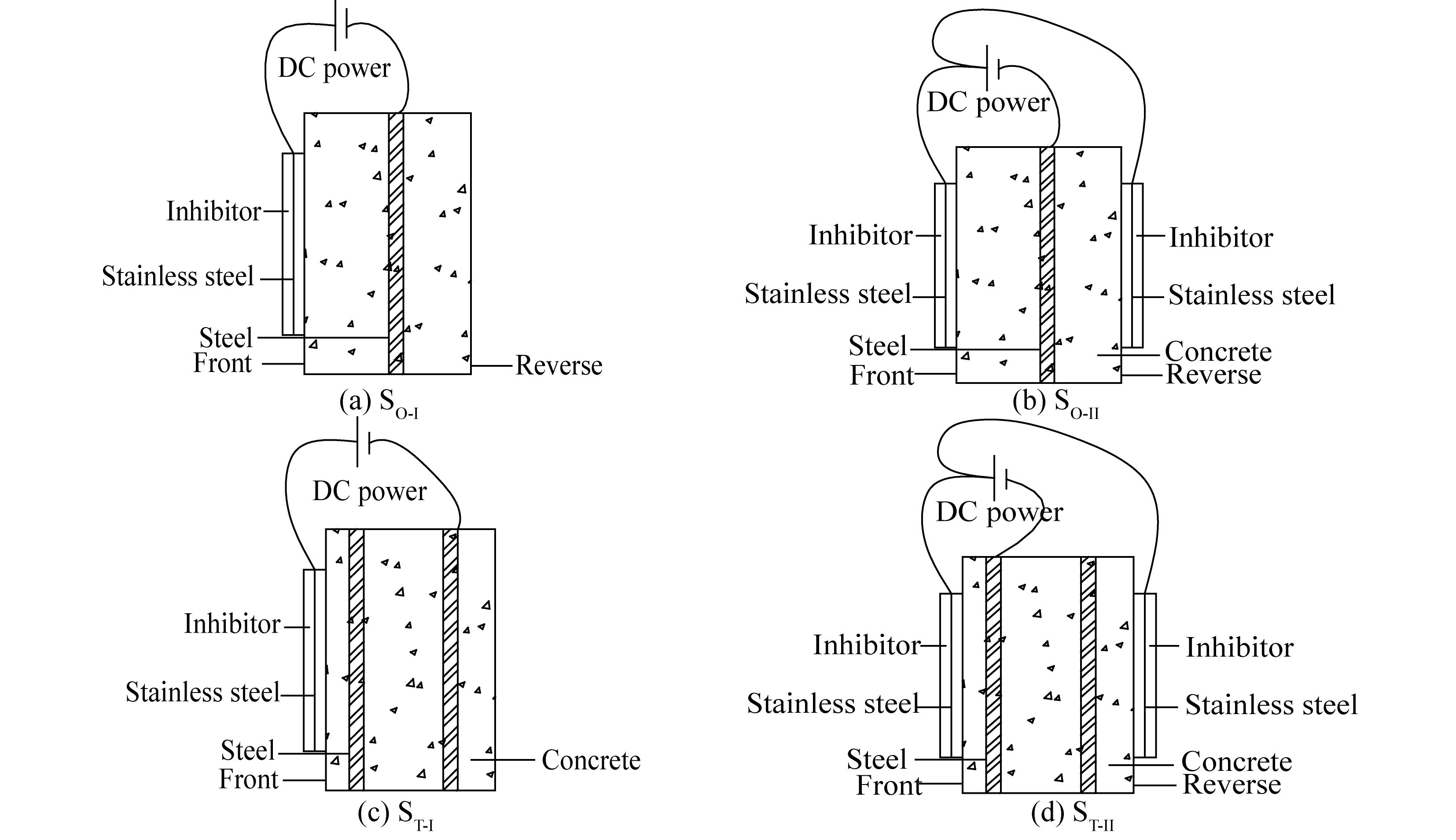
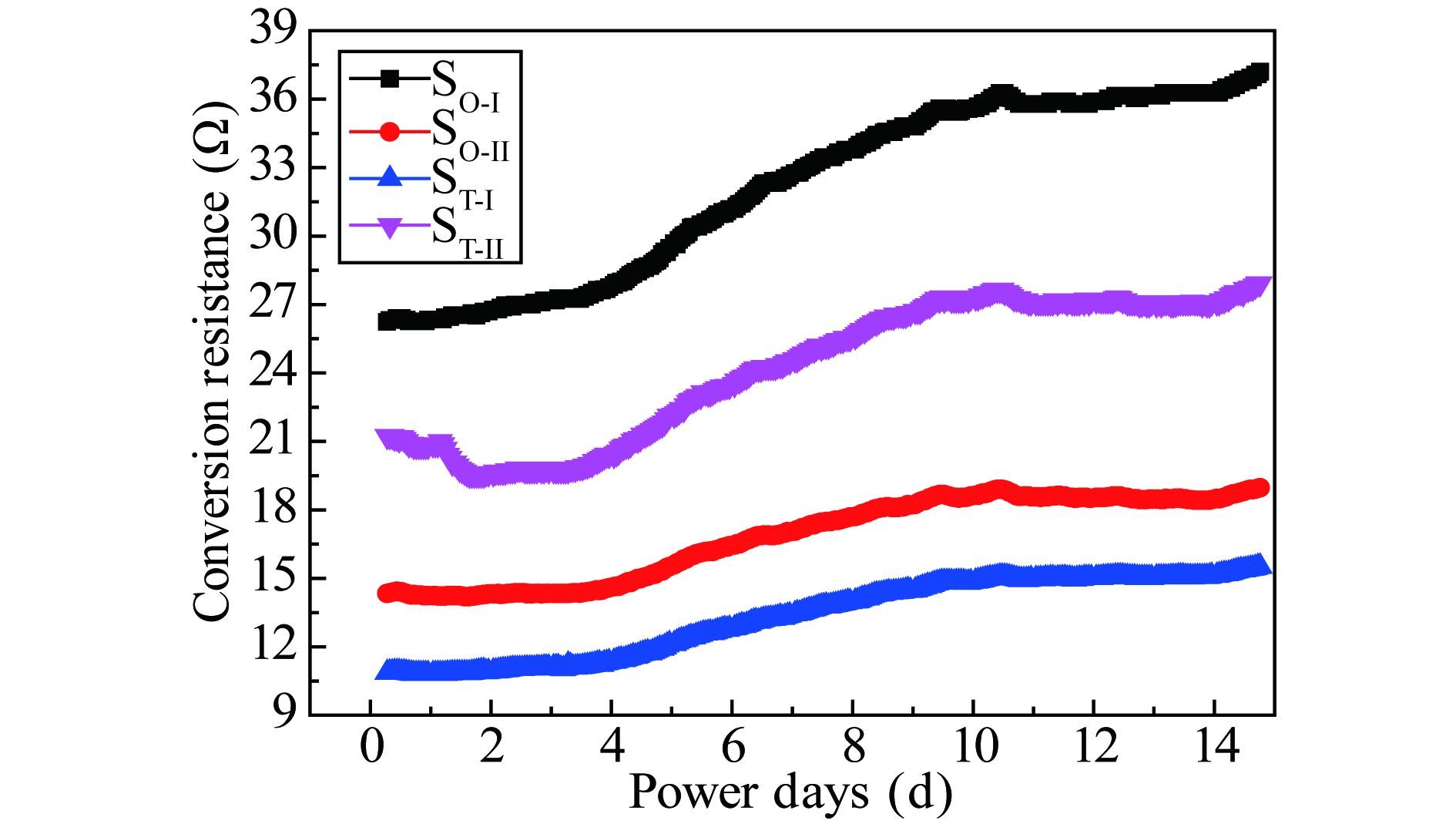
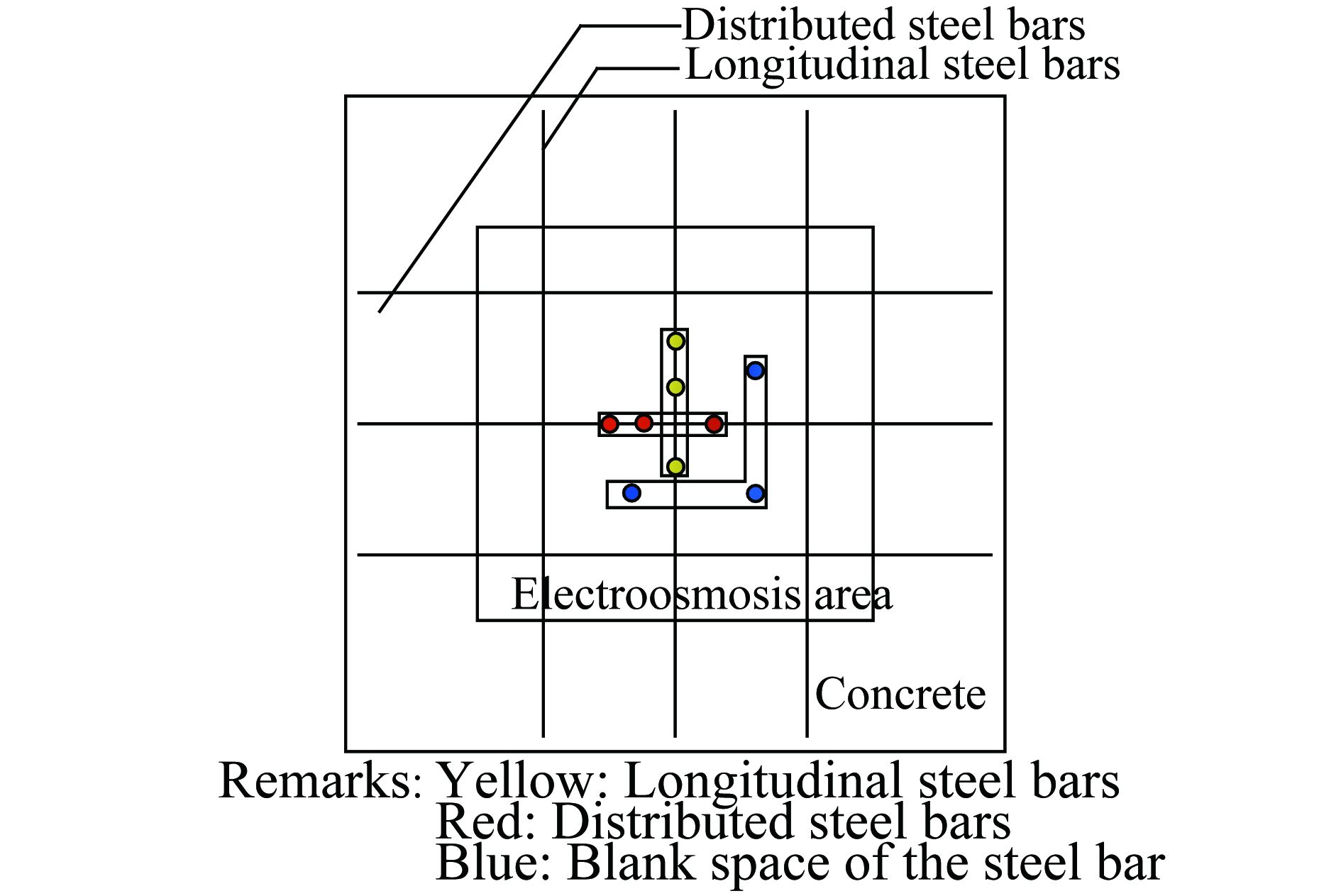
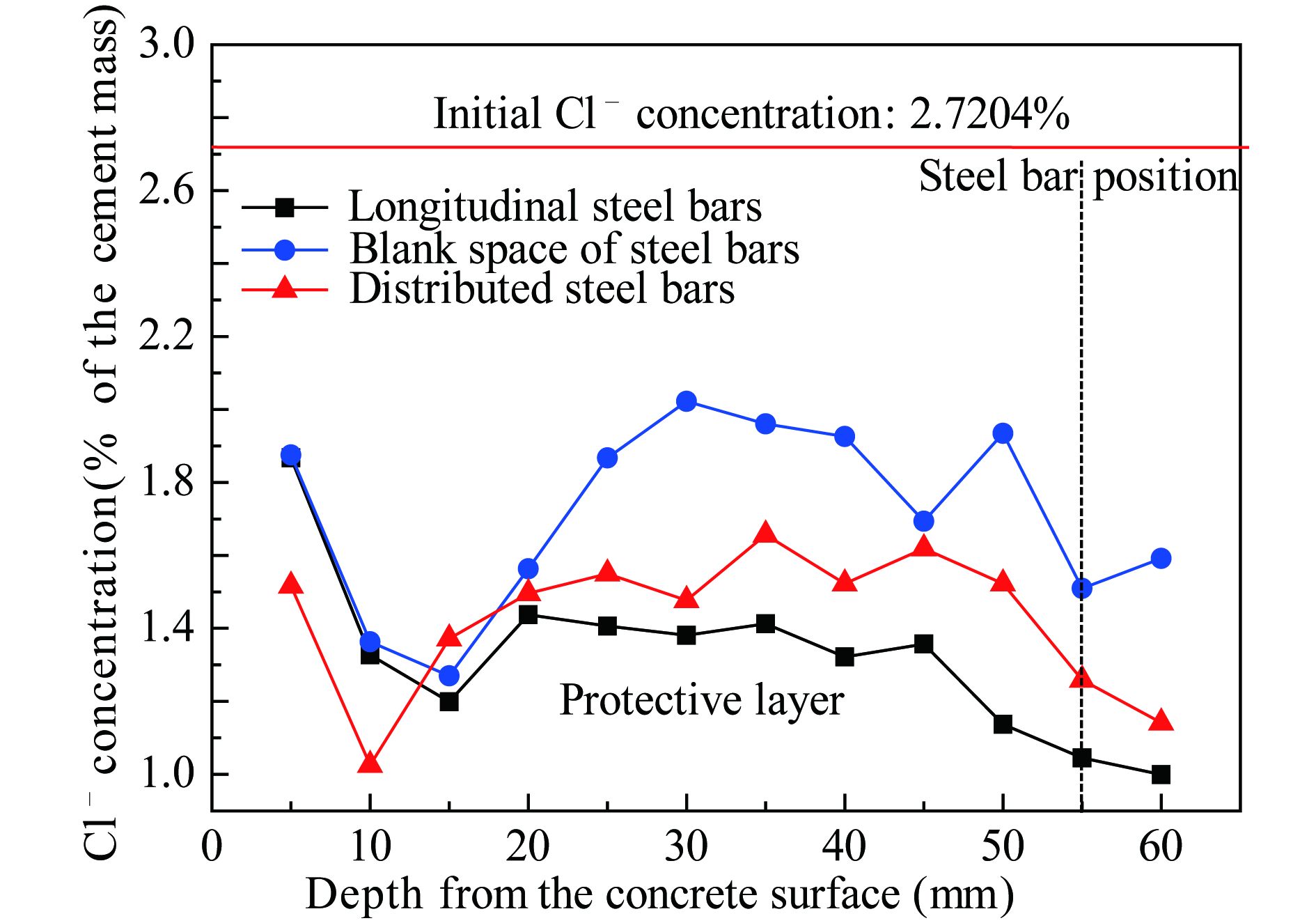
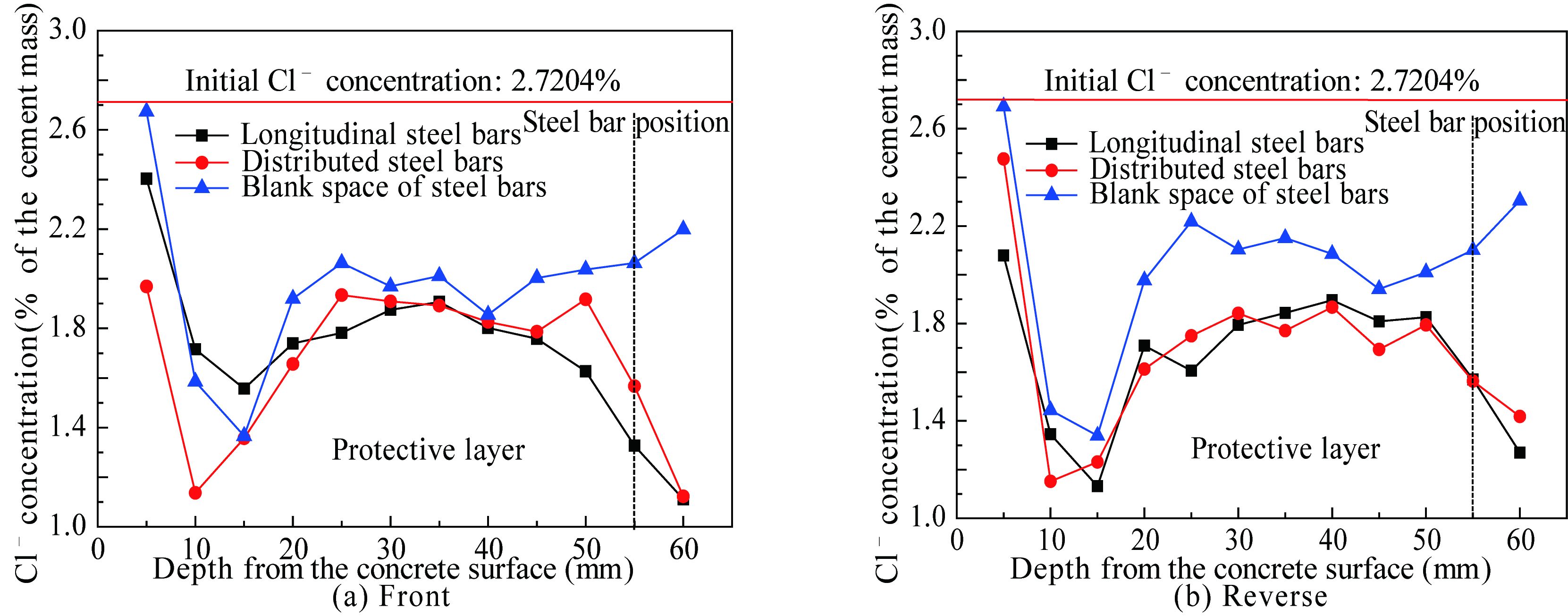
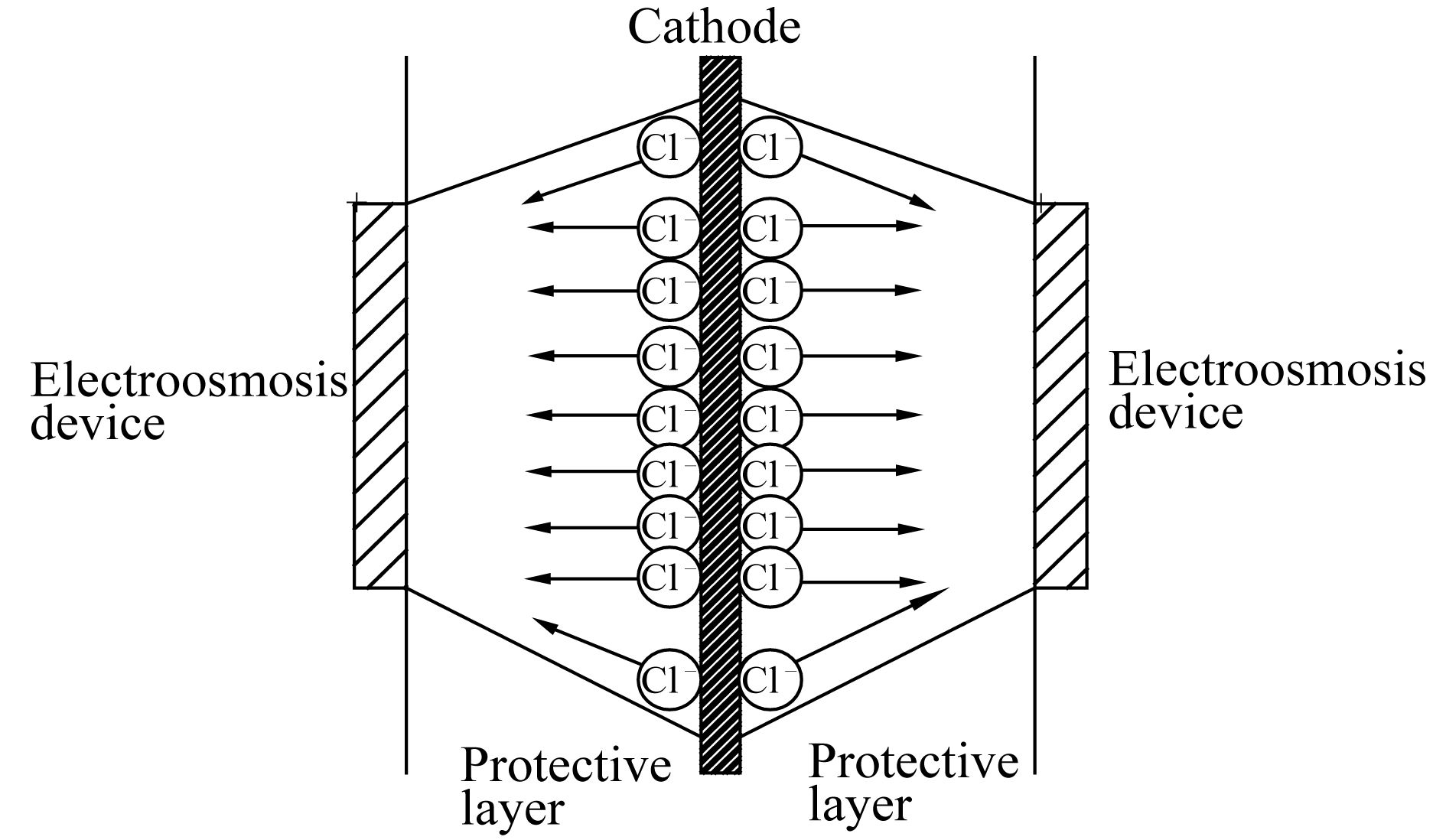
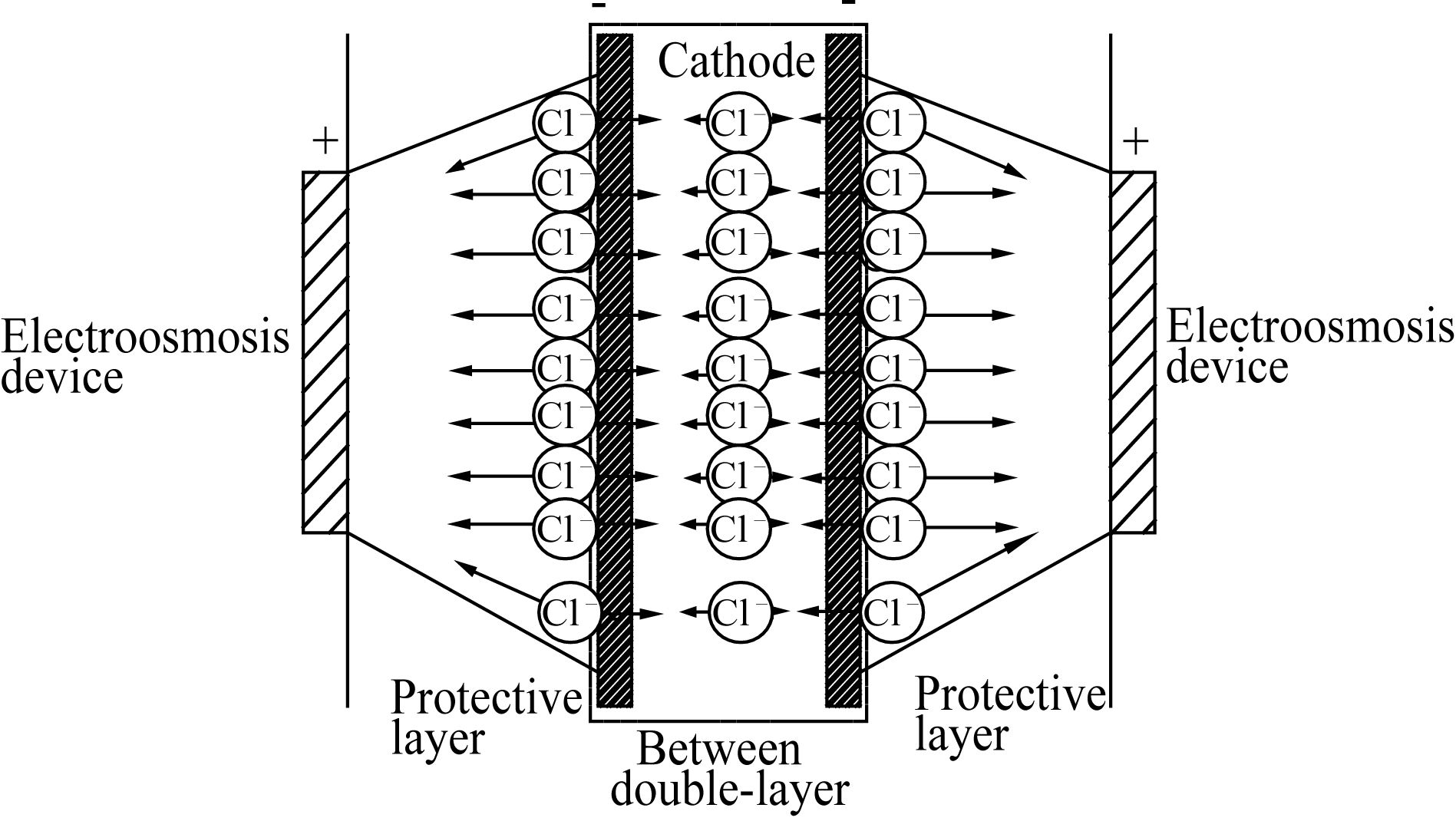
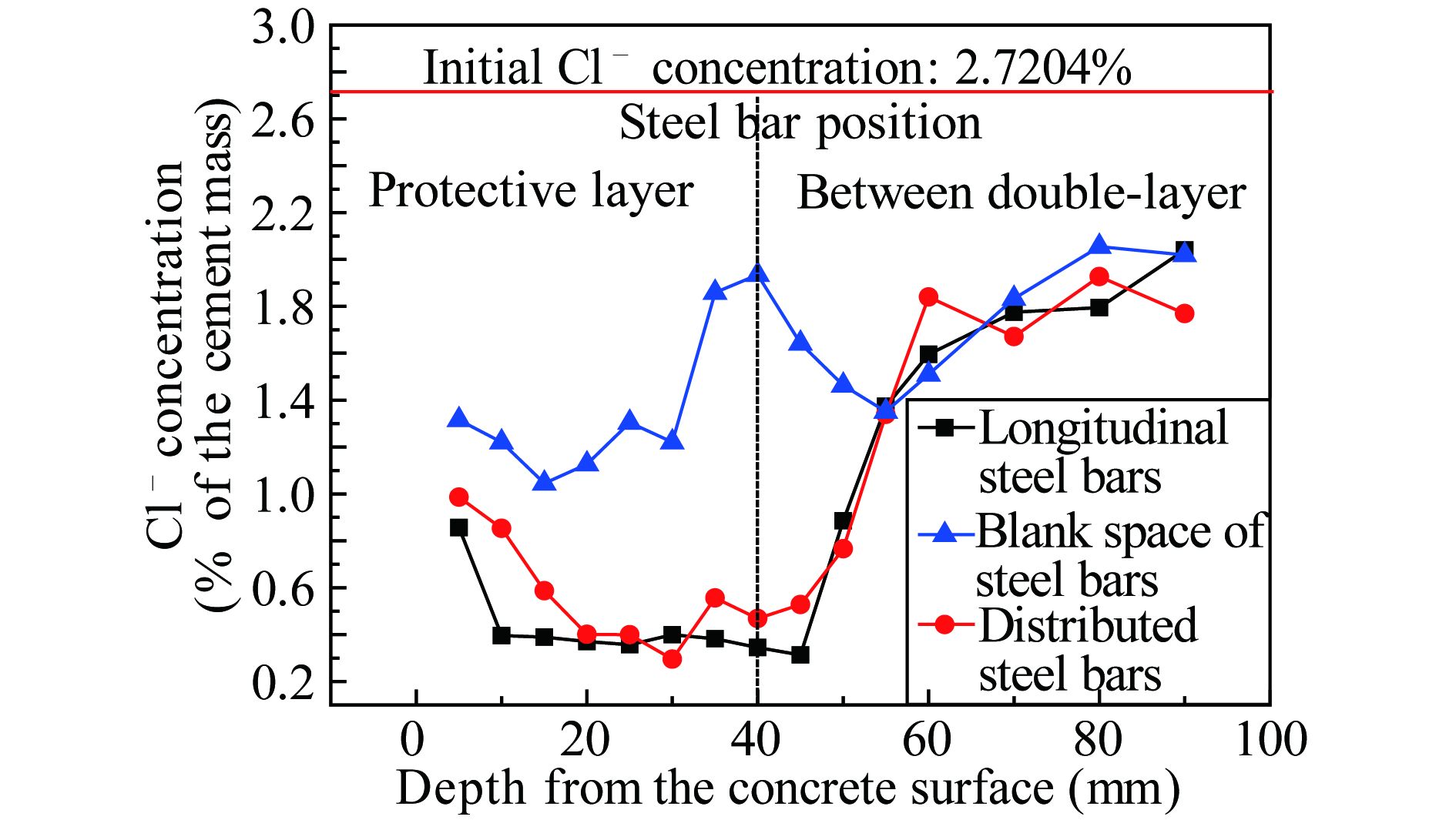
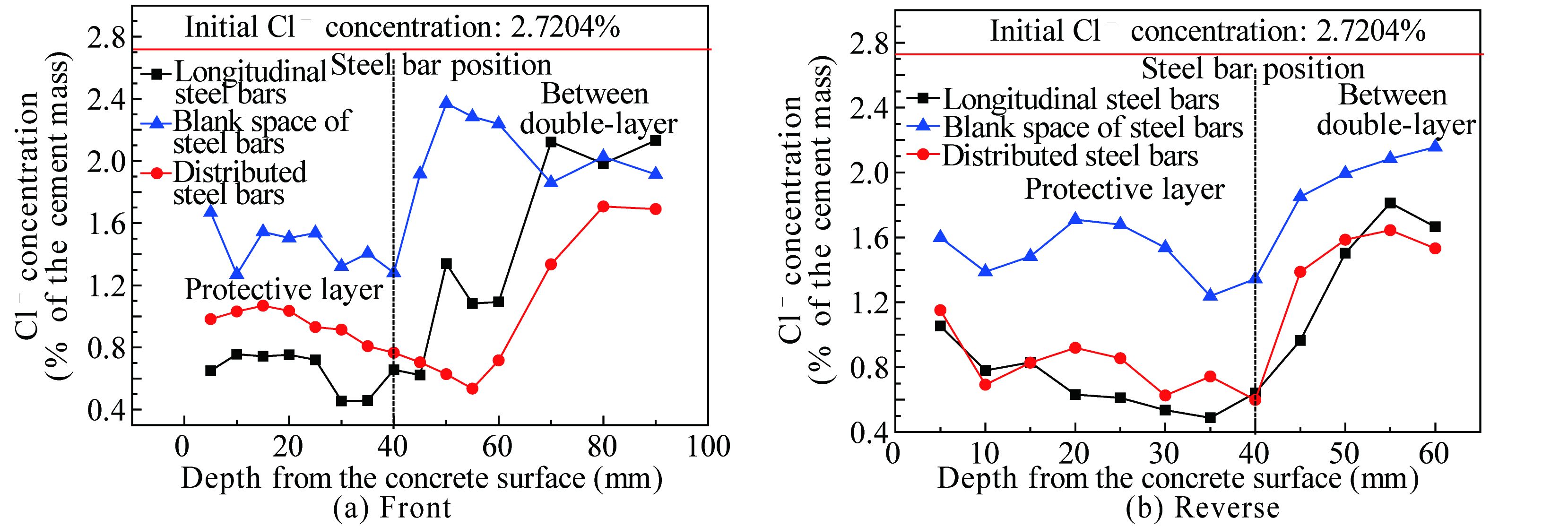
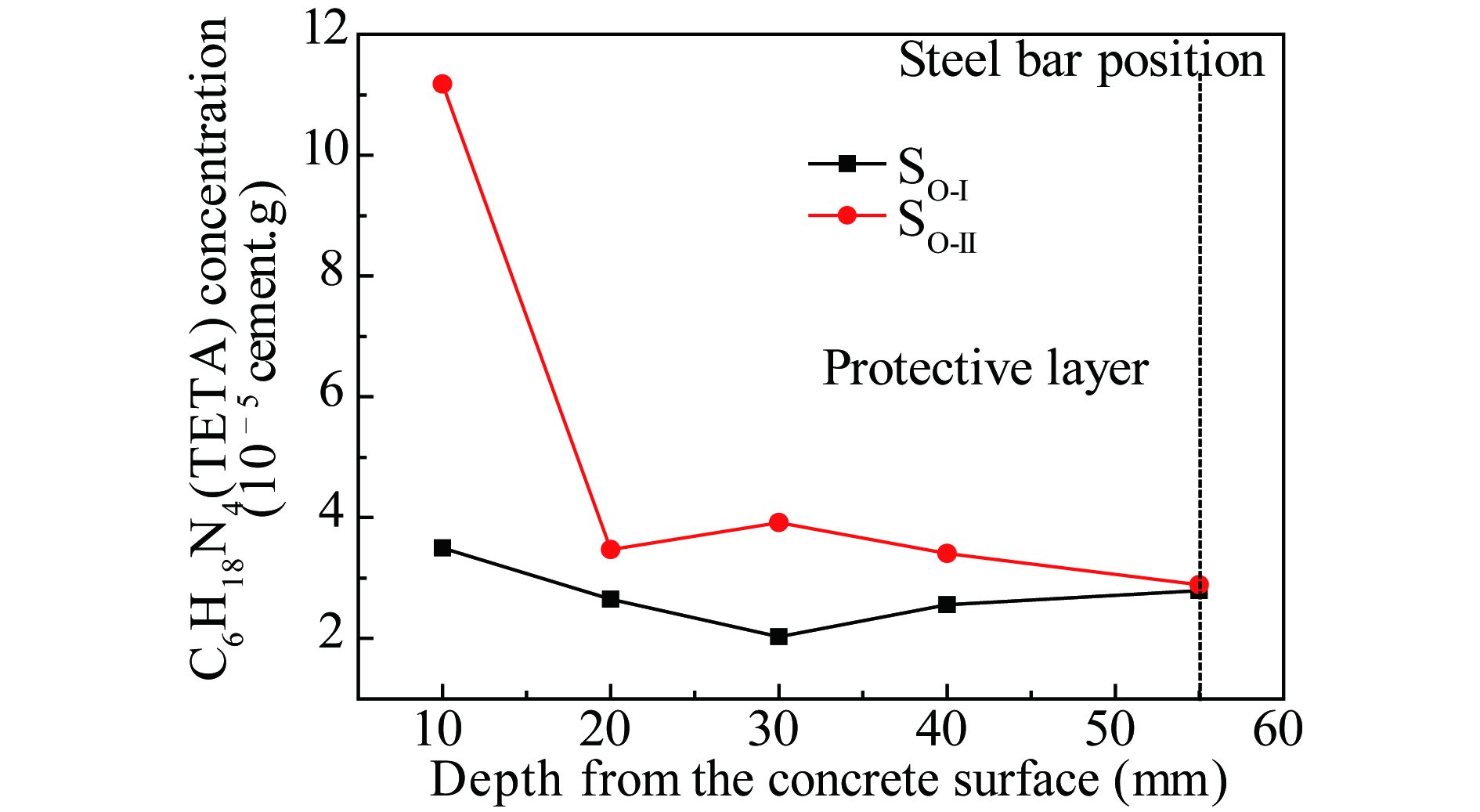
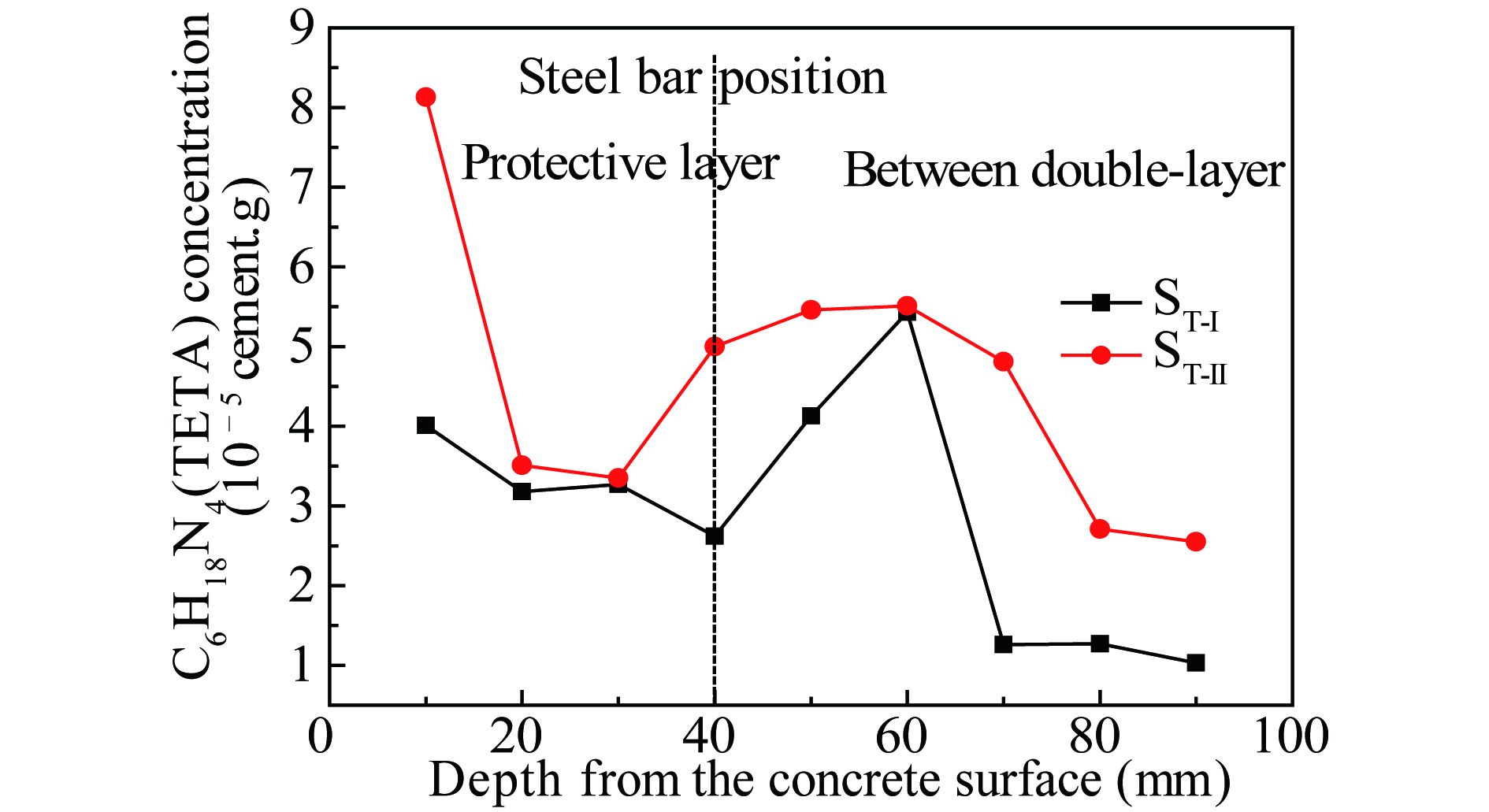
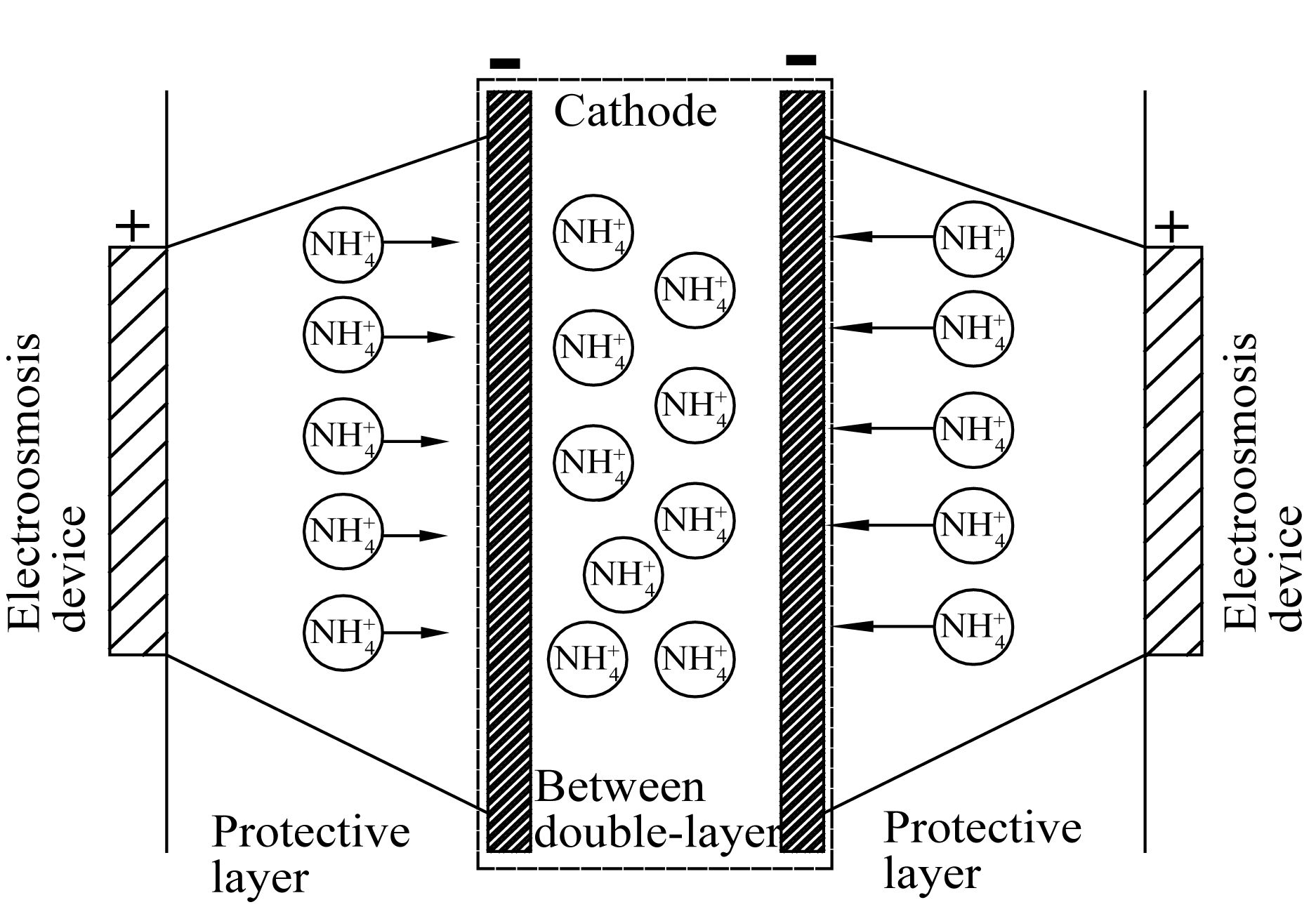
Steel bar in concrete structures under harsh environmental conditions, such as chlorine corrosion, seriously affects its service life. Bidirectional electromigration rehabilitation (BIEM) is a new method of repair technology for reinforced concrete structures in such chloride corrosion environments. By applying the BIEM, chloride ions can be removed from the concrete and the migrating corrosion inhibit can be moved to the steel surface. In conventional engineering, the concrete structure is often configured with a multi-layer steel mesh. However, the effect of the BIEM in such structures has not yet been investigated. In this paper, the relevant simulation test is carried out to study the migration law of chloride ions and the migrating corrosion inhibitor in a concrete specimen with complex steel mesh under different energizing modes. The results show that the efficiency of the BIEM increases 50% in both the monolayer steel mesh and the double-layer steel mesh. By using the single-sided BIEM, 87% of the chloride ions are removed from the steel surface. The different step modes can affect the chloride ion removal. The chloride ions within the range of the reinforcement protective cover are easier to be removed than those in the concrete between the two layers of steel mesh. However, the amount of migrating corrosion inhibitor is larger in the latter circumstances.
Steel bar in concrete structures under harsh environmental conditions, such as chlorine corrosion, seriously affects its service life. Bidirectional electromigration rehabilitation (BIEM) is a new method of repair technology for reinforced concrete structures in such chloride corrosion environments. By applying the BIEM, chloride ions can be removed from the concrete and the migrating corrosion inhibit can be moved to the steel surface. In conventional engineering, the concrete structure is often configured with a multi-layer steel mesh. However, the effect of the BIEM in such structures has not yet been investigated. In this paper, the relevant simulation test is carried out to study the migration law of chloride ions and the migrating corrosion inhibitor in a concrete specimen with complex steel mesh under different energizing modes. The results show that the efficiency of the BIEM increases 50% in both the monolayer steel mesh and the double-layer steel mesh. By using the single-sided BIEM, 87% of the chloride ions are removed from the steel surface. The different step modes can affect the chloride ion removal. The chloride ions within the range of the reinforcement protective cover are easier to be removed than those in the concrete between the two layers of steel mesh. However, the amount of migrating corrosion inhibitor is larger in the latter circumstances.


2017, 31(5): 639-645.
doi: 10.1007/s13344-017-0073-7
Abstract:
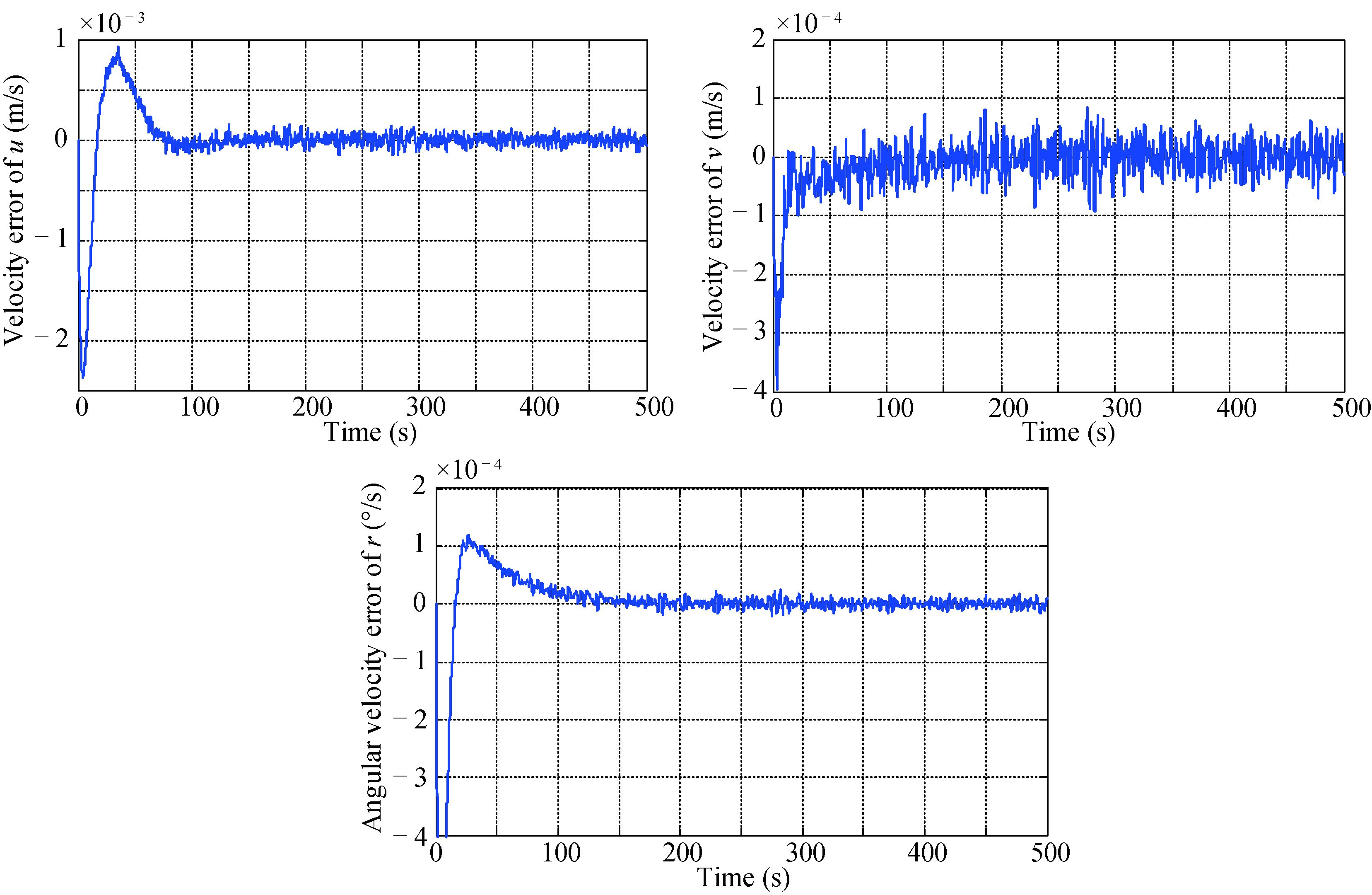
Modified adaptive observer based backstepping control system for dynamic positioning of ship is proposed. As an improvement, the adaptive observer takes the first-order wave frequency model and the bias term which represent the slowly varying environmental disturbances and the unmodeled dynamics. Thus, the wave-frequency motions are filtered out, and only the reconstructed low-frequency motions are sent as inputs of the controller. Furthermore, as the ship dynamics parameters are unknown, the adaptive estimation law is designed for both the unknown ship dynamics and the unmeasured state variables. Based on the estimated states and parameters, backstepping controller considering the integral action is designed. Global exponential stability (GES) for the total system is proved using Lyapunov direct method. Simulation results show a good performance of the observer and control system.
Modified adaptive observer based backstepping control system for dynamic positioning of ship is proposed. As an improvement, the adaptive observer takes the first-order wave frequency model and the bias term which represent the slowly varying environmental disturbances and the unmodeled dynamics. Thus, the wave-frequency motions are filtered out, and only the reconstructed low-frequency motions are sent as inputs of the controller. Furthermore, as the ship dynamics parameters are unknown, the adaptive estimation law is designed for both the unknown ship dynamics and the unmeasured state variables. Based on the estimated states and parameters, backstepping controller considering the integral action is designed. Global exponential stability (GES) for the total system is proved using Lyapunov direct method. Simulation results show a good performance of the observer and control system.

2017, 31(5): 646-652.
doi: 10.1007/s13344-017-0074-6
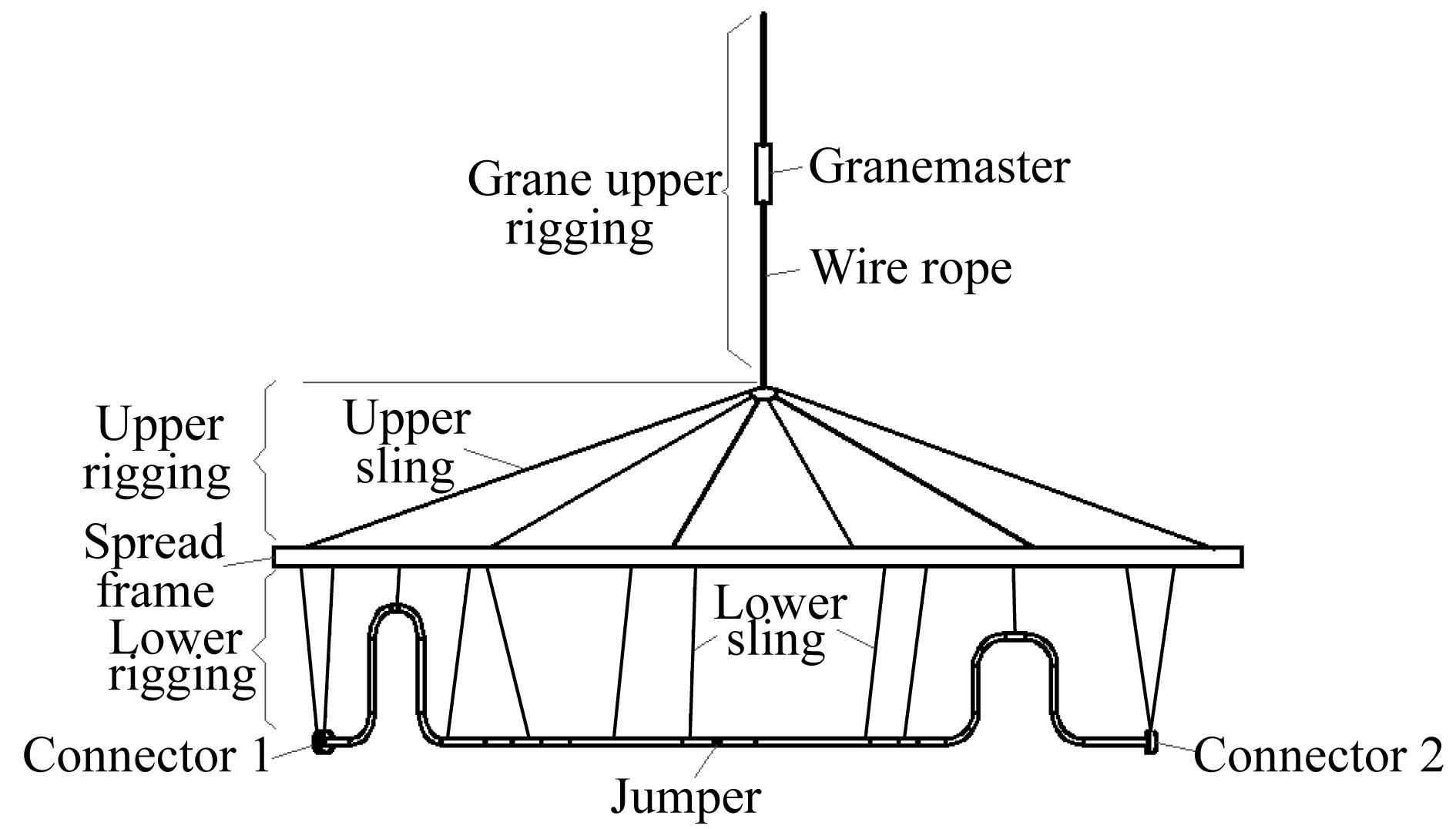
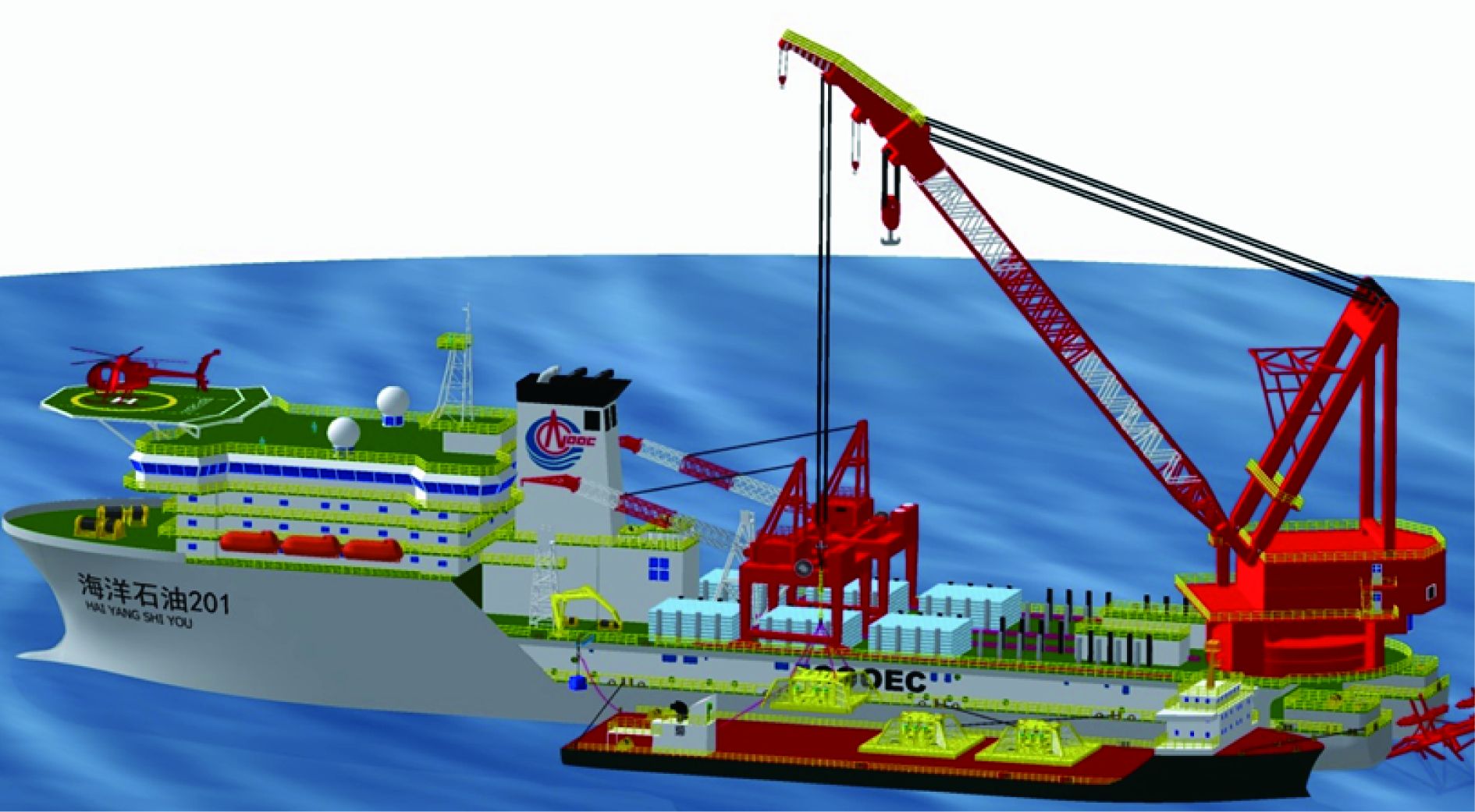
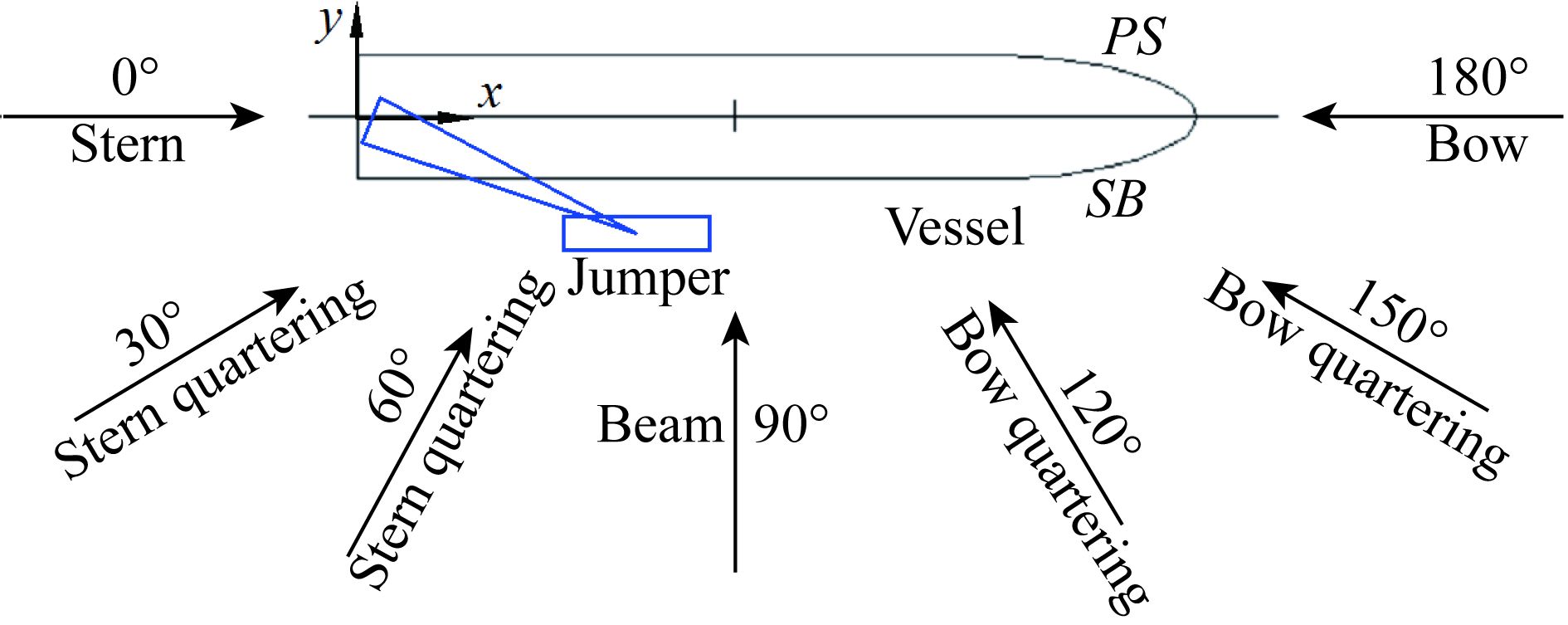
Abstract:
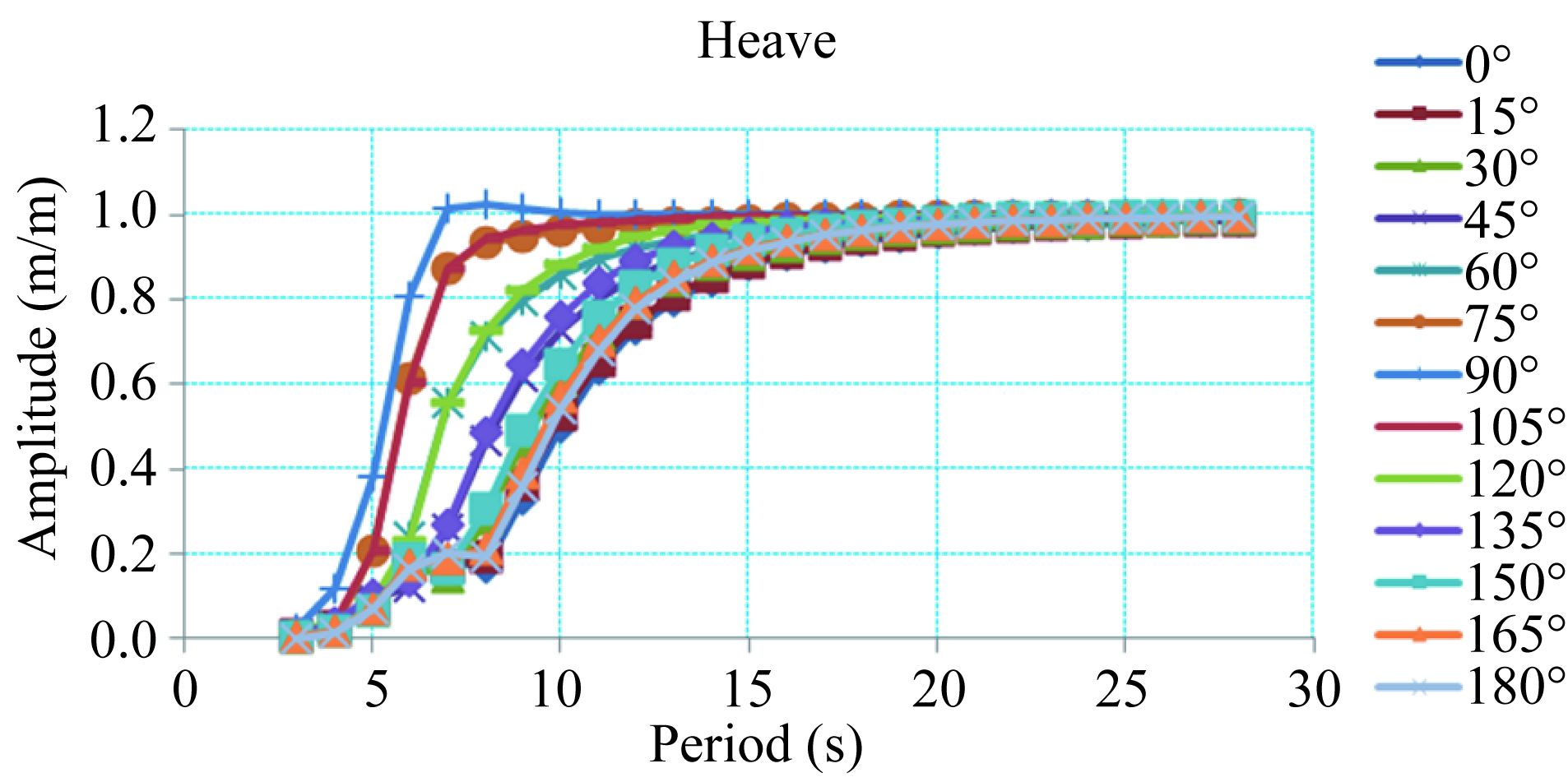
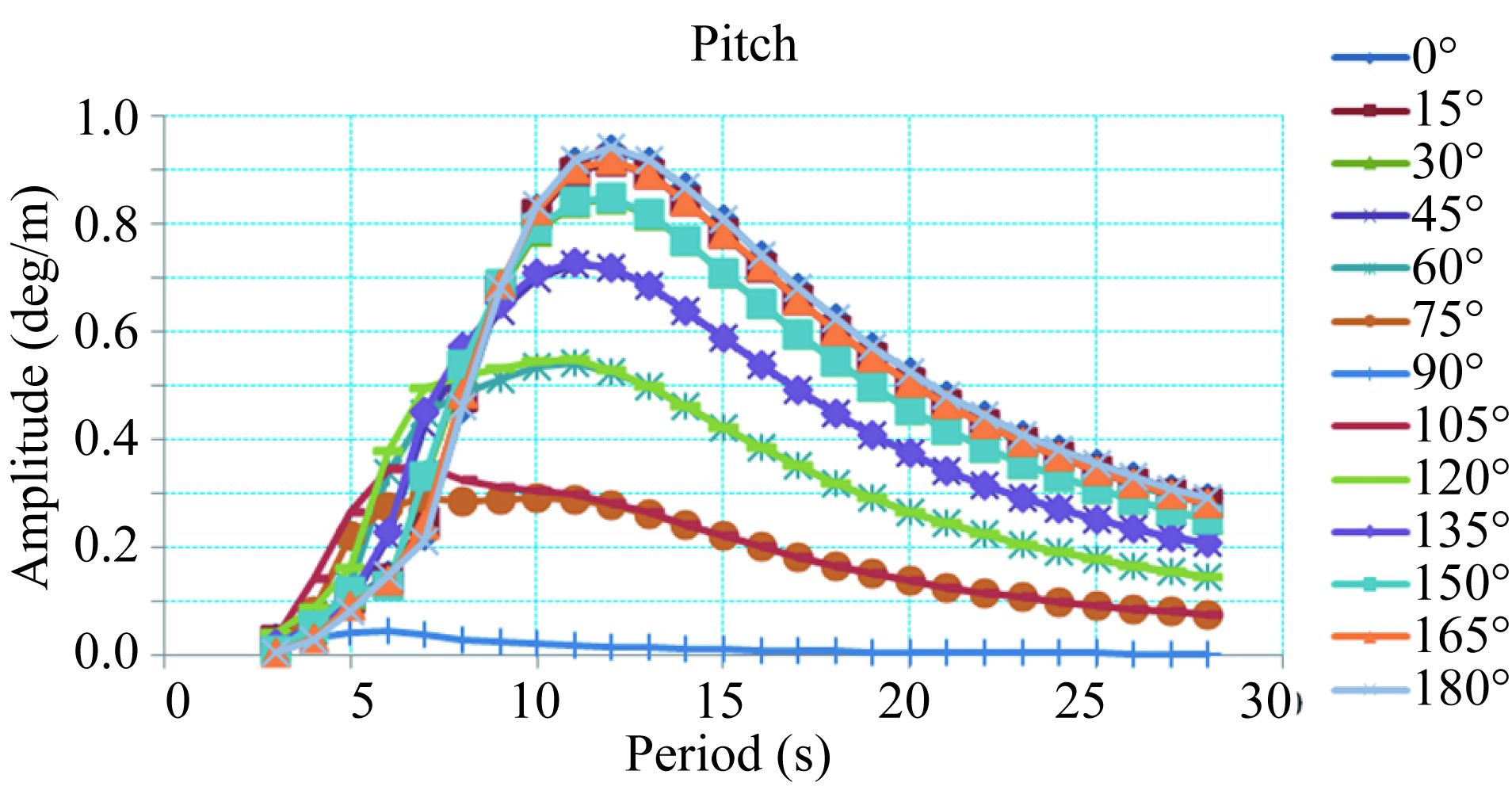
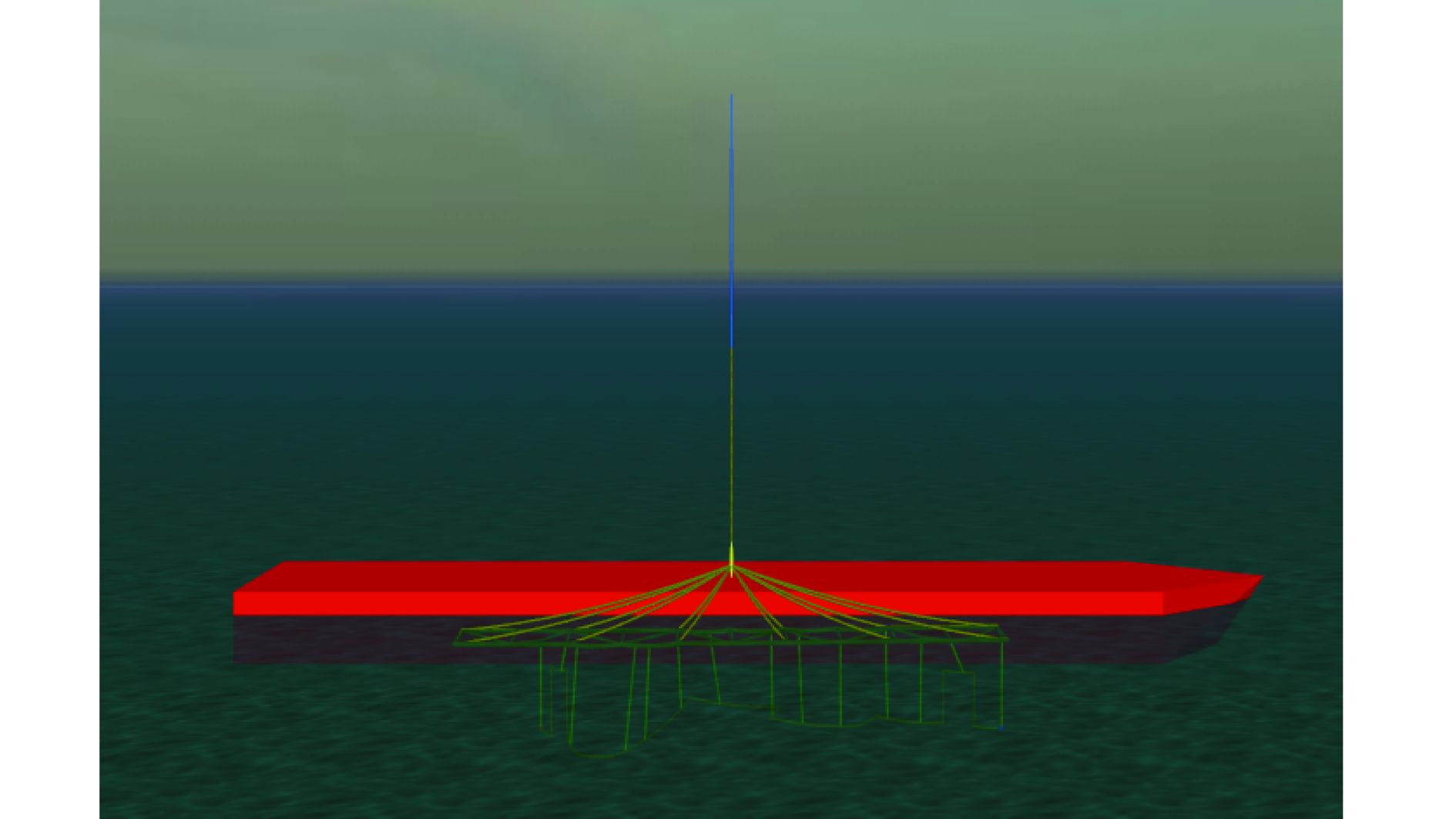
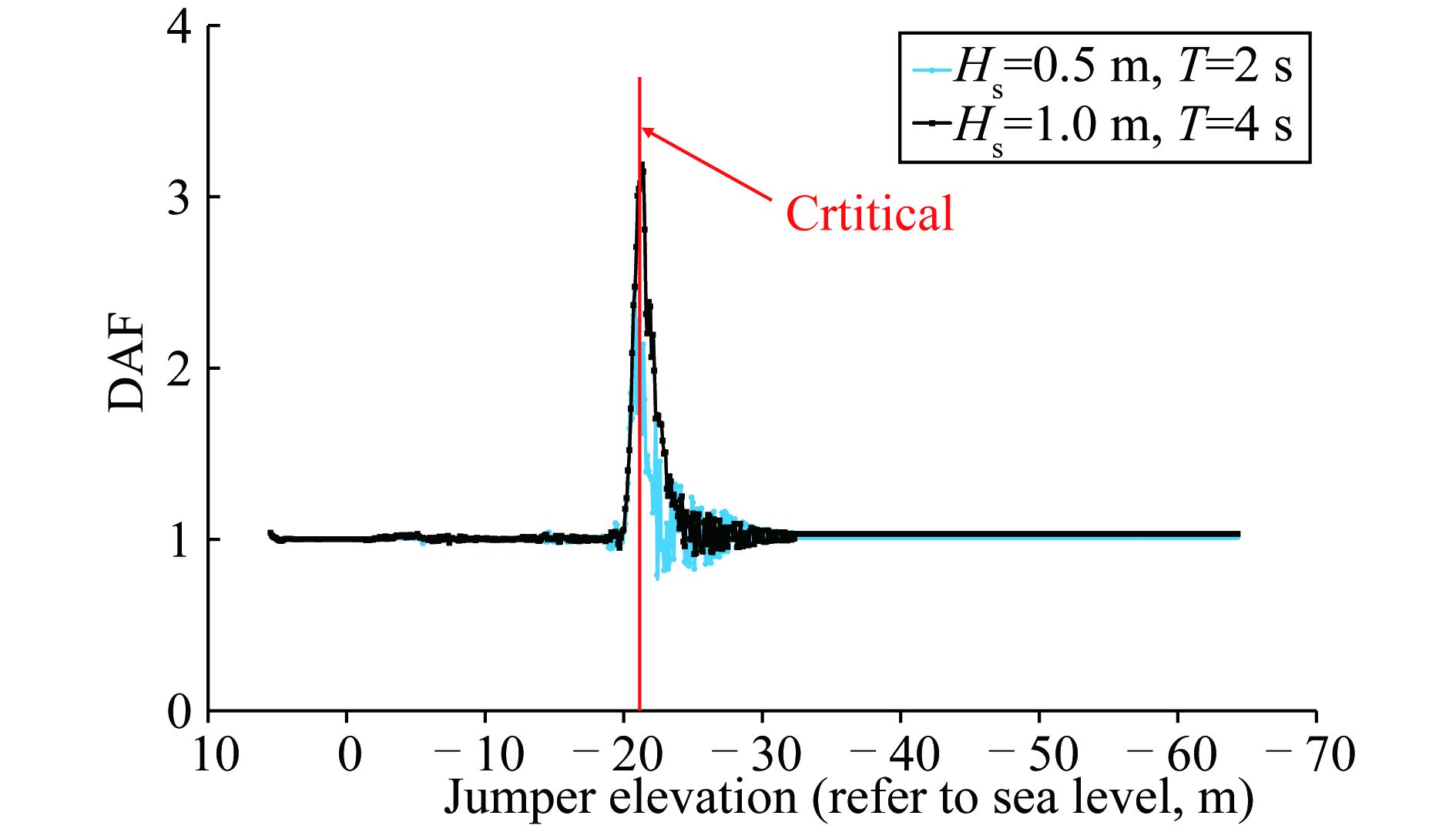
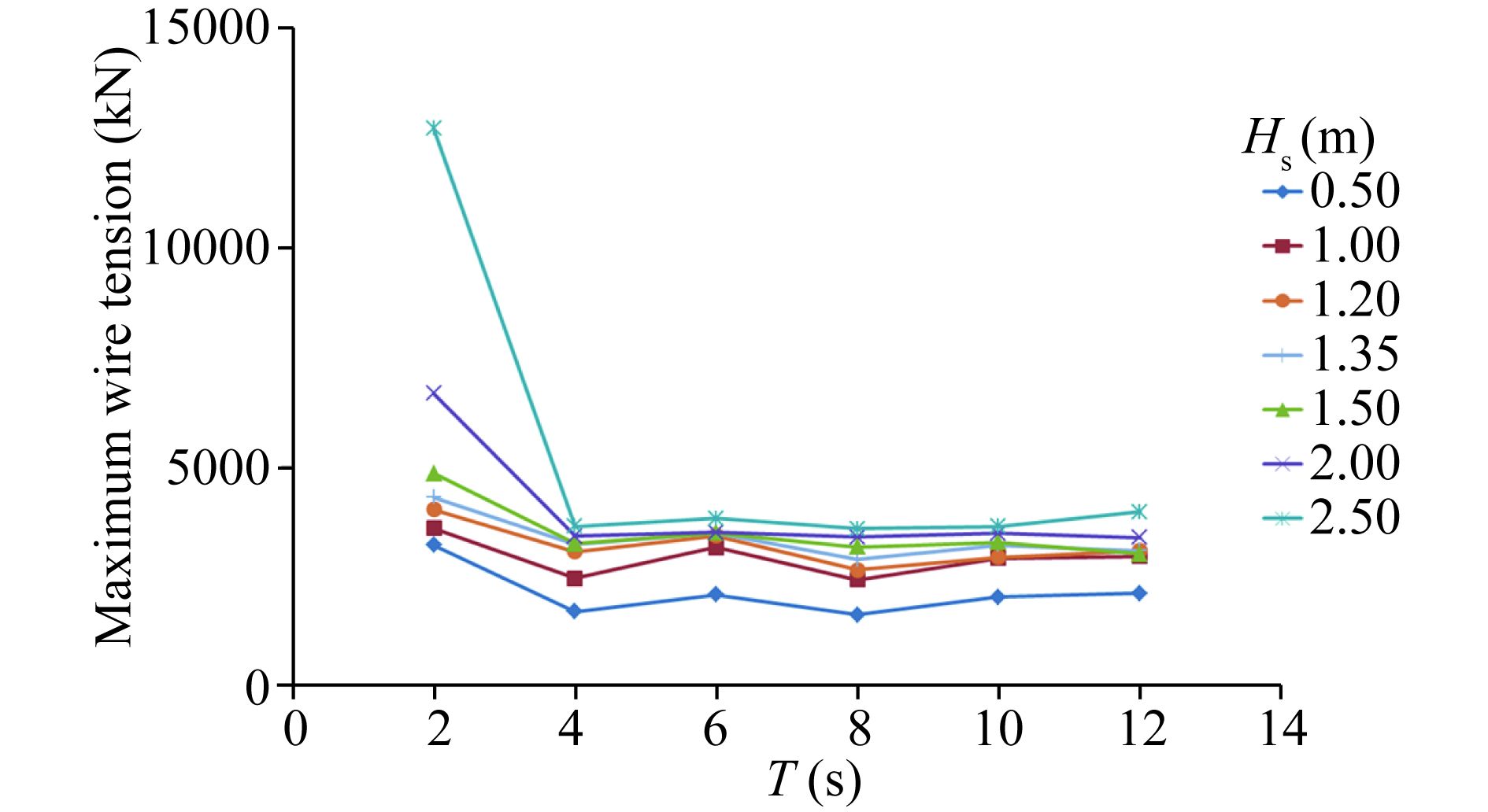
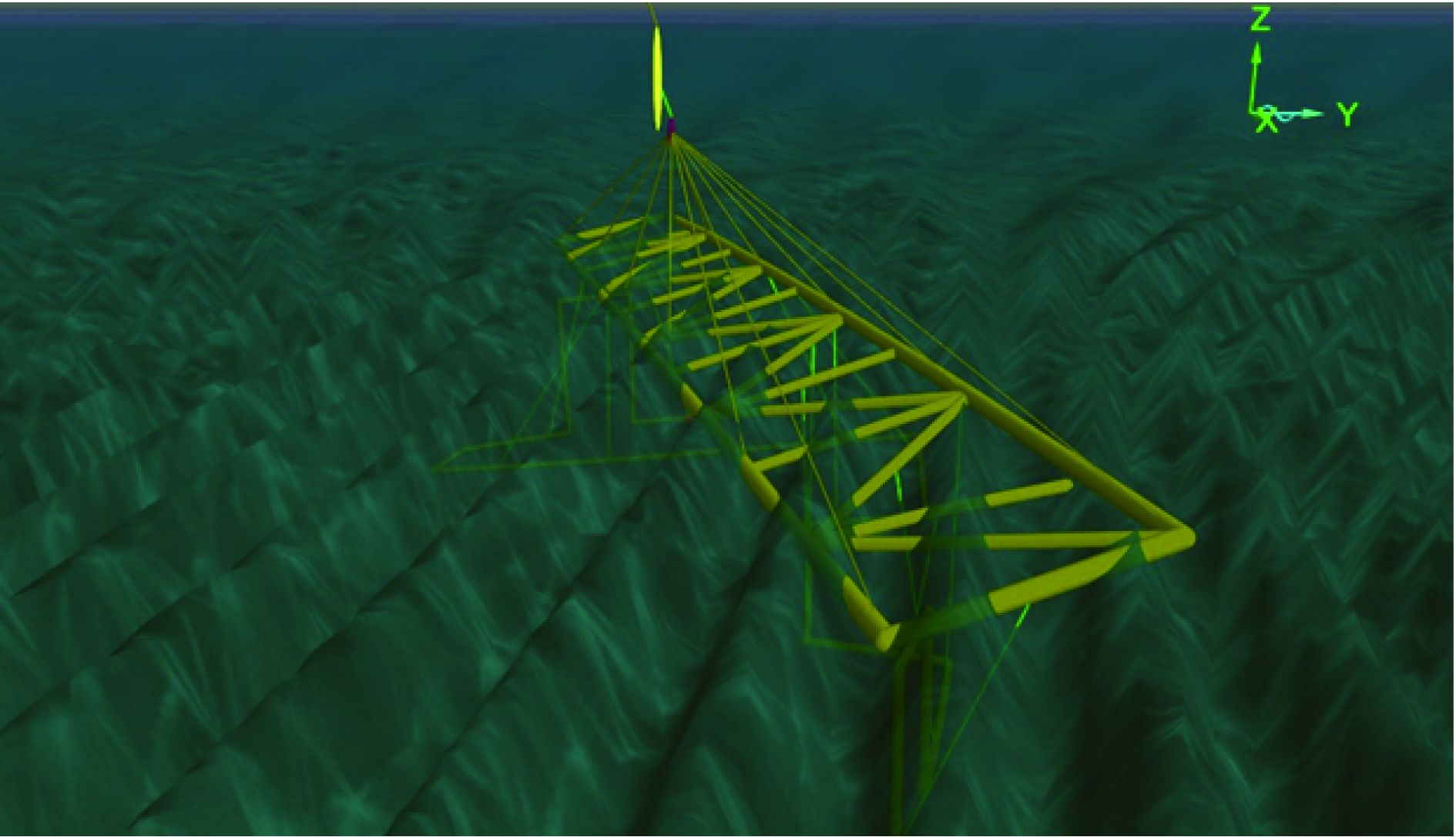
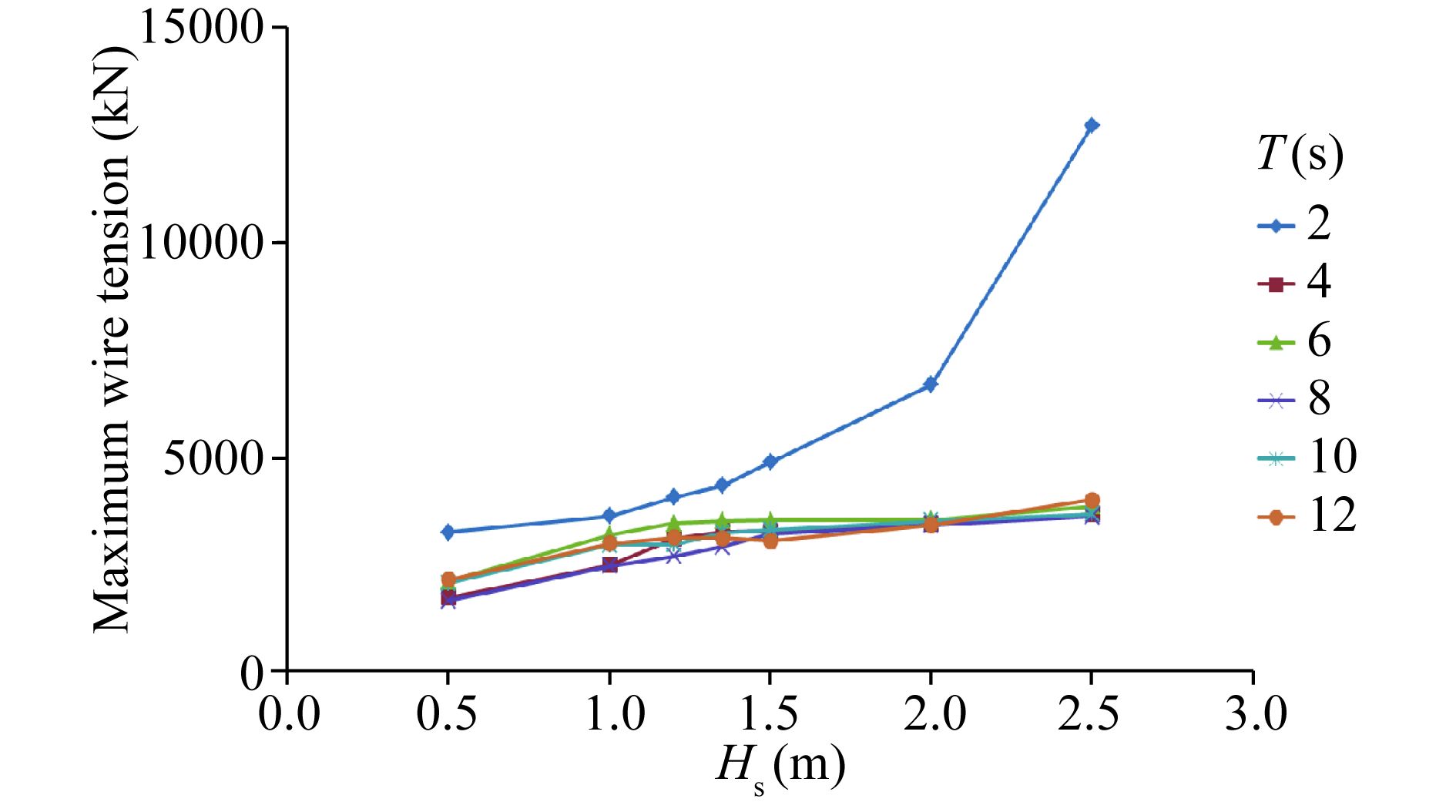
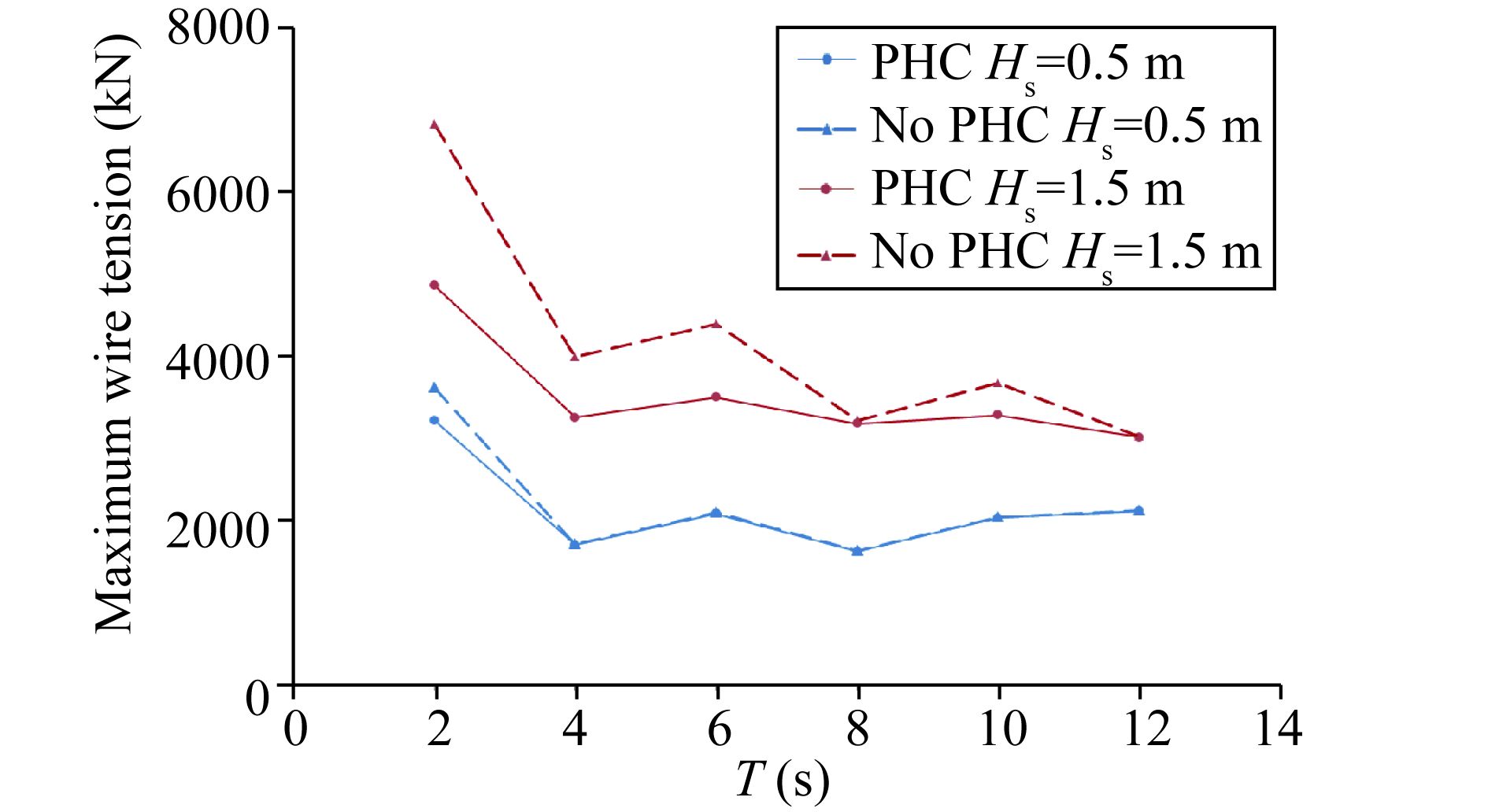
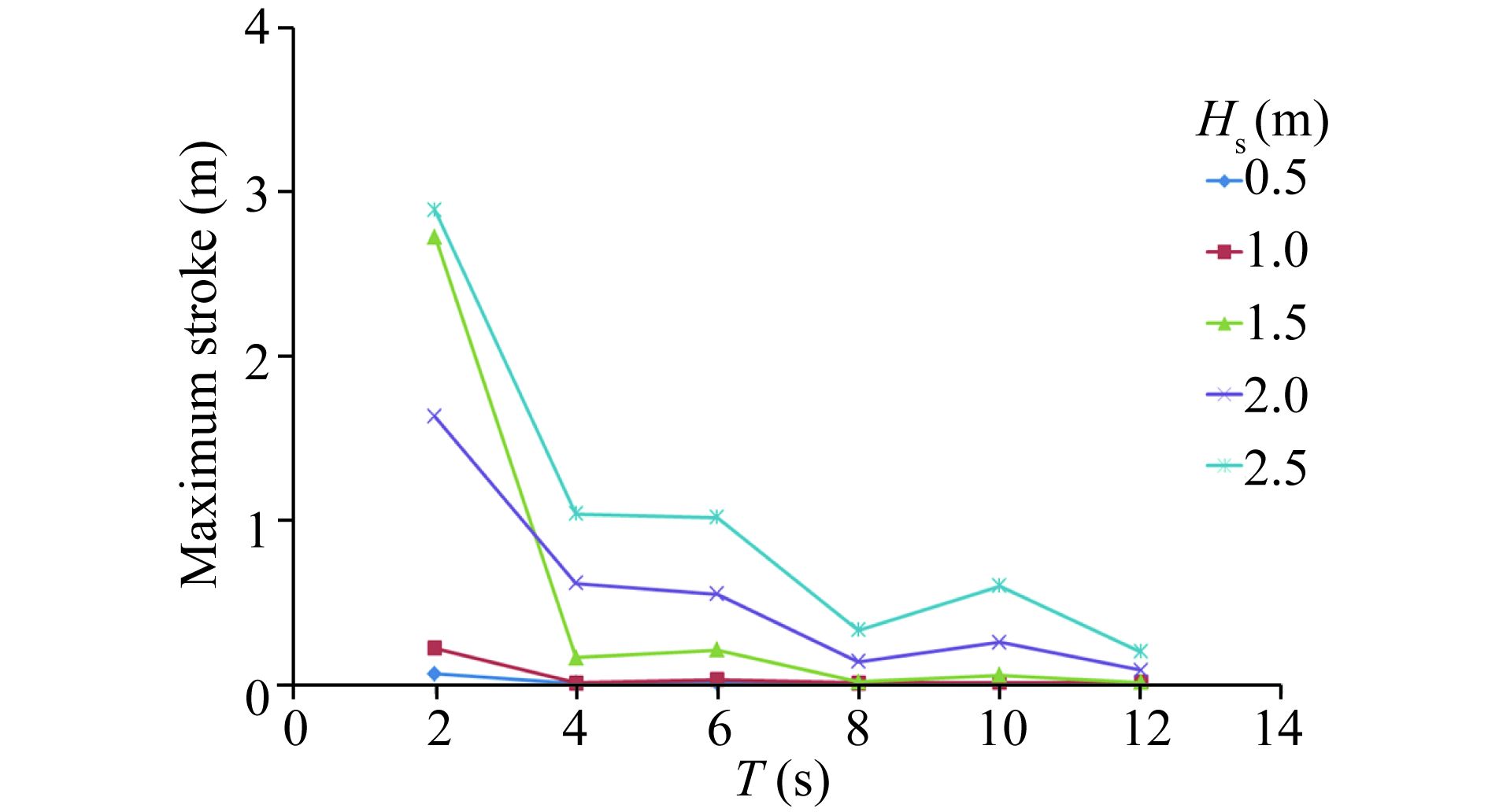
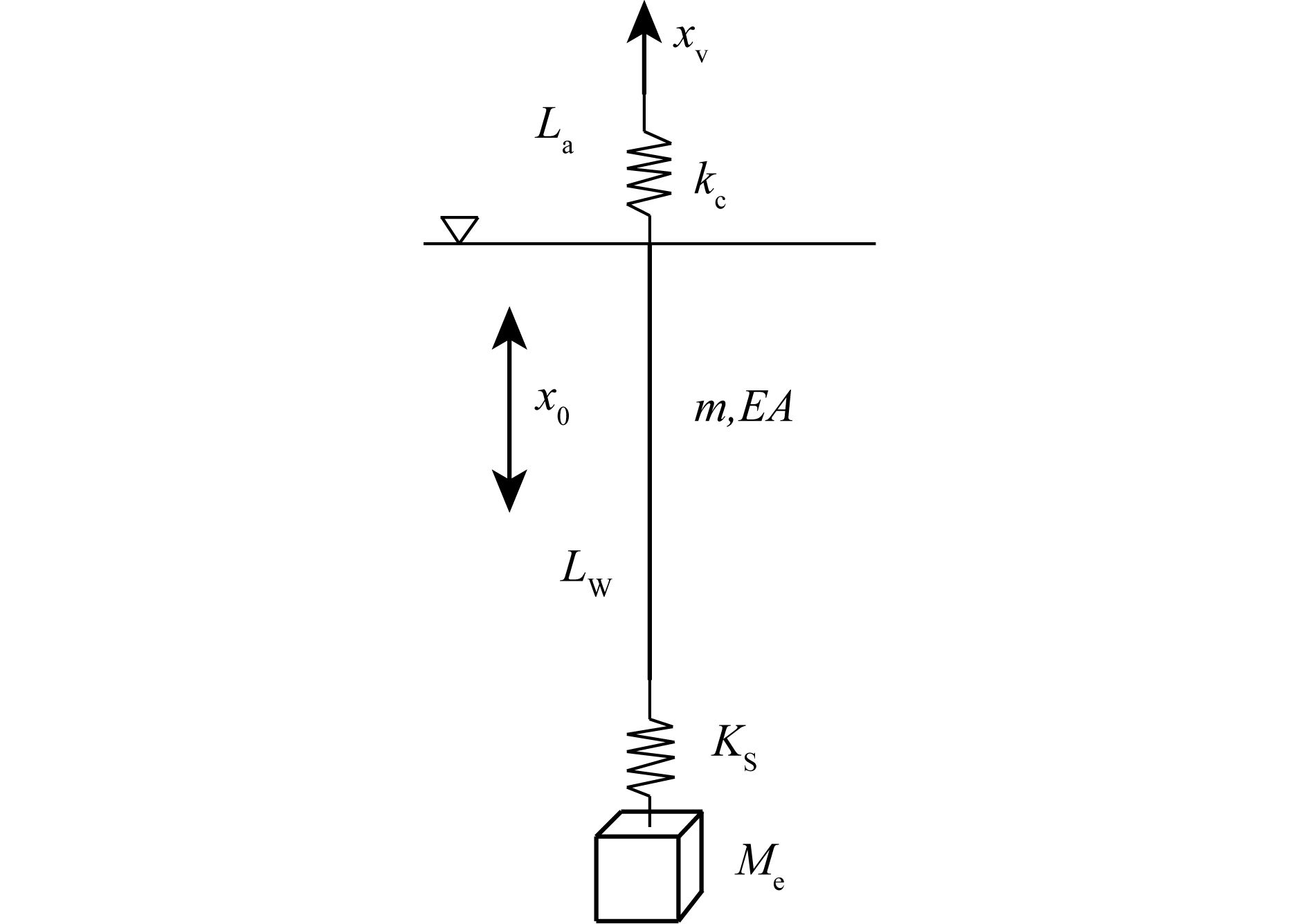
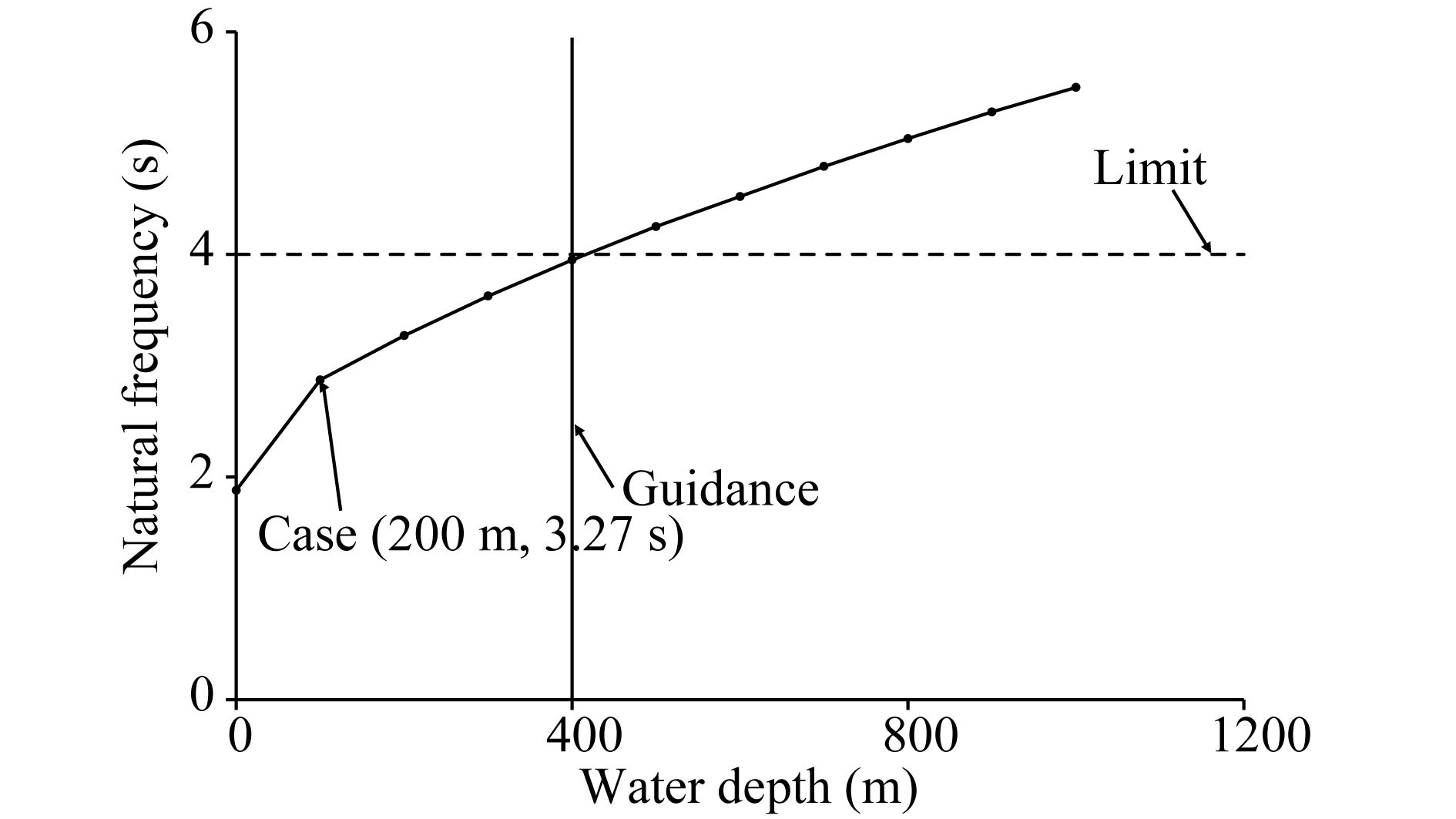
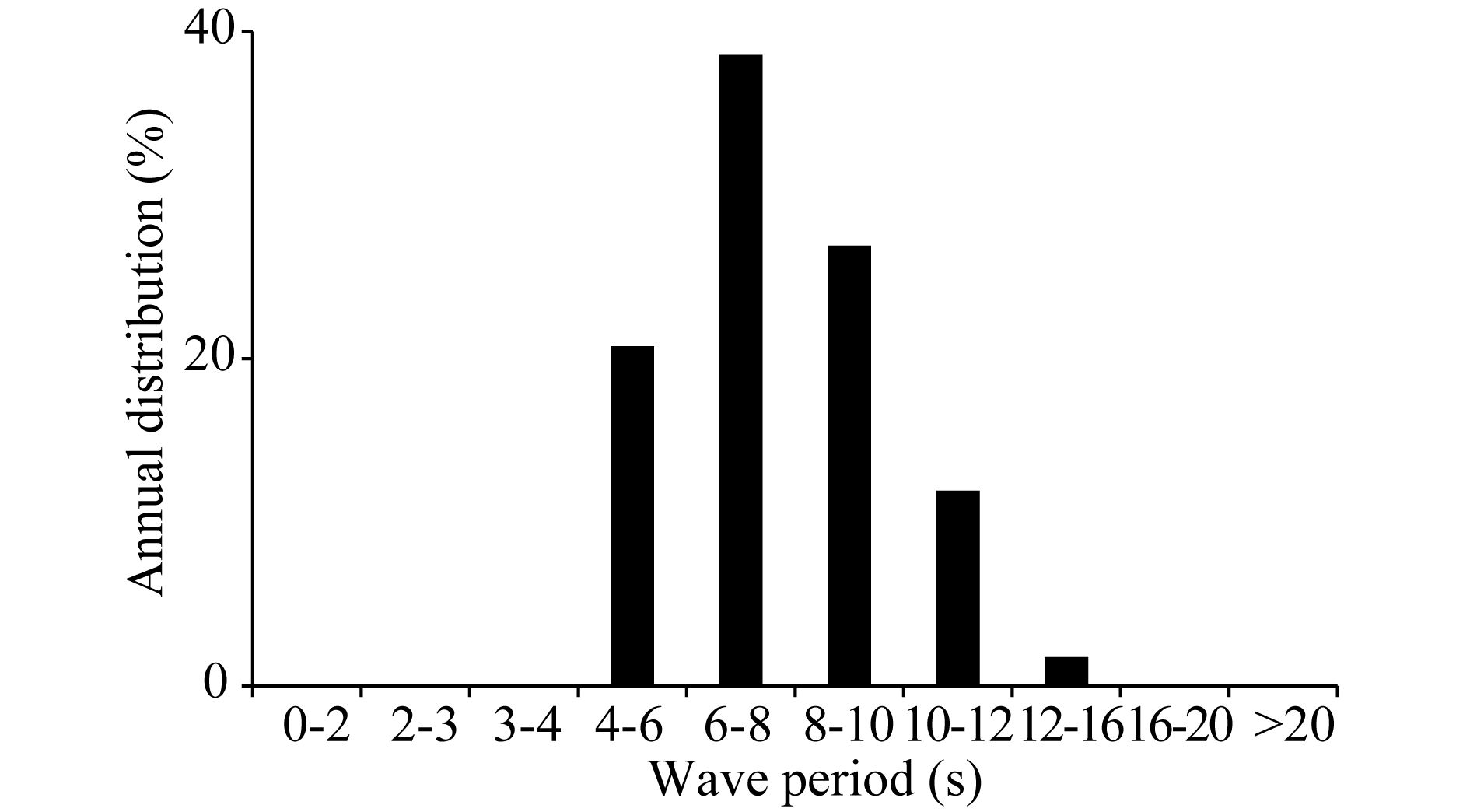
Subsea production system has been increasingly used in recent South China Sea offshore developments. With deepwater applications, constituent parts of subsea systems become more complicated and enlarged. Increases on the weight and geometry of each component bring challenges to installations. A recent accomplished deployment on a subsea massive jumper shows the weight and length have been up to 120 tons and 90 m, respectively with sophisticated geometry. It is considerably difficult to install heavy and large subsea structures, especially in South China Sea where severe environmental conditions are common. In addition, deepwater deployment may alter natural frequency of the hoisting system and the altered frequency may be close to possible environmental conditions. To deal with the above two issues, traditionally, engineers need to carry out series of complicated numerical analyses which are on case basis and significantly time-consuming. Existing studies focus on the optimization on analysis techniques by conducting laboratory testing and numerical simulations. However, easy-to-use guidance on massive subsea structure installation are somewhat limited. The studies presented in this paper aim to achieve a simplified guidance which can briefly screen the cases subject to axial resonance and provide visible correlations between hoisting system integrity and key installation parameters.
Subsea production system has been increasingly used in recent South China Sea offshore developments. With deepwater applications, constituent parts of subsea systems become more complicated and enlarged. Increases on the weight and geometry of each component bring challenges to installations. A recent accomplished deployment on a subsea massive jumper shows the weight and length have been up to 120 tons and 90 m, respectively with sophisticated geometry. It is considerably difficult to install heavy and large subsea structures, especially in South China Sea where severe environmental conditions are common. In addition, deepwater deployment may alter natural frequency of the hoisting system and the altered frequency may be close to possible environmental conditions. To deal with the above two issues, traditionally, engineers need to carry out series of complicated numerical analyses which are on case basis and significantly time-consuming. Existing studies focus on the optimization on analysis techniques by conducting laboratory testing and numerical simulations. However, easy-to-use guidance on massive subsea structure installation are somewhat limited. The studies presented in this paper aim to achieve a simplified guidance which can briefly screen the cases subject to axial resonance and provide visible correlations between hoisting system integrity and key installation parameters.

ScholarOne Manuscripts Log In
Current Issue
- Volume 40
- Issue 1
- February 2026
- Editor-in-Chief:
- Superintended by:
CHINA ASSOCIATION FOR SCIENCE AND TECHNOLOGY
- Sponsored by:
Chinese Ocean Engineering Society (COES)
- Edited by:
Nanjing Hydraulic Research Institute
Highlights
Stay up to Date
 Article abstracts by RSS
Article abstracts by RSS E-mail Alerts
E-mail Alerts