
Current Articles
Display Method: |
2026, 40(3)
:479-493.
doi: 10.1007/s13344-026-0037-x
Abstract:
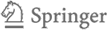
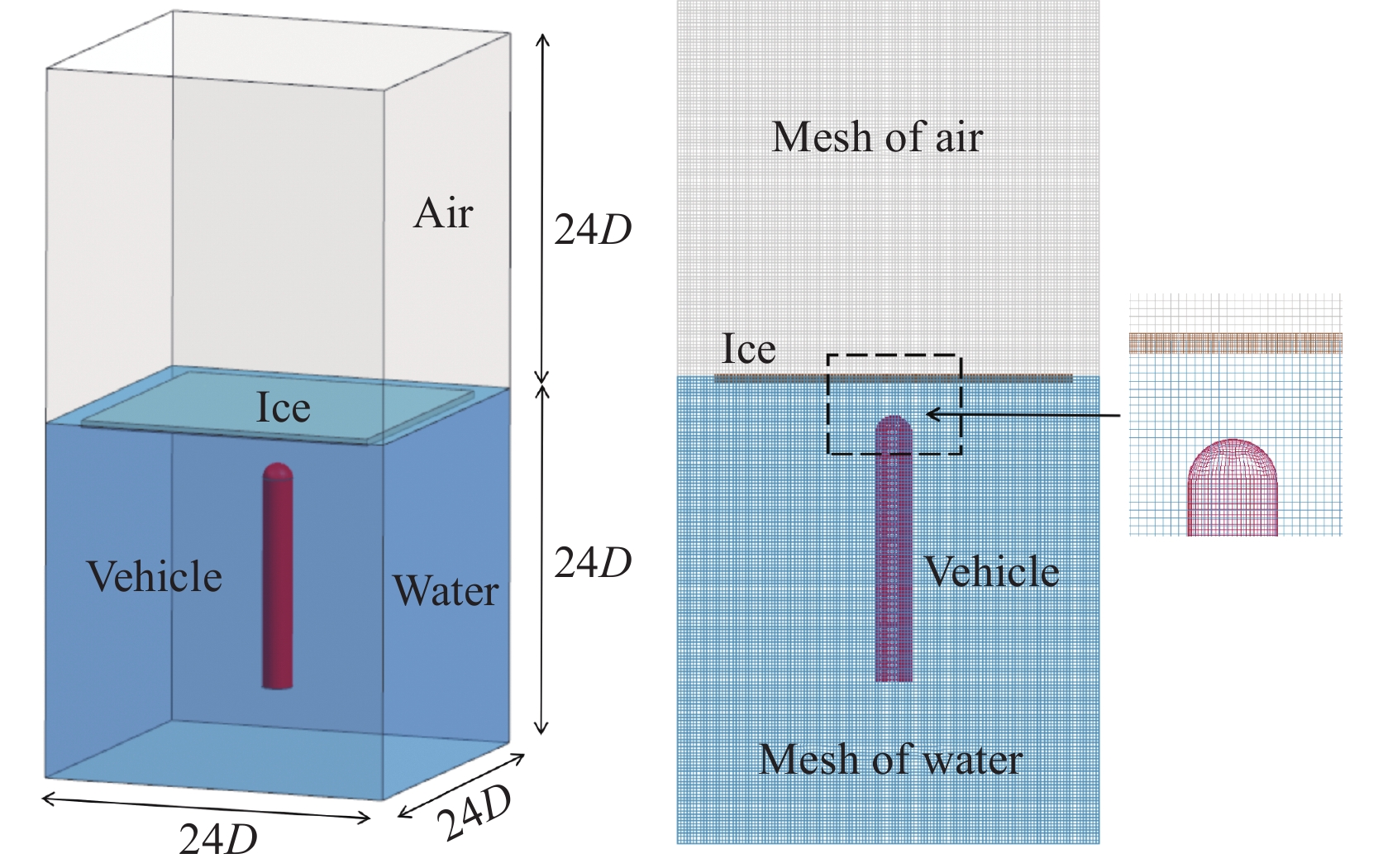
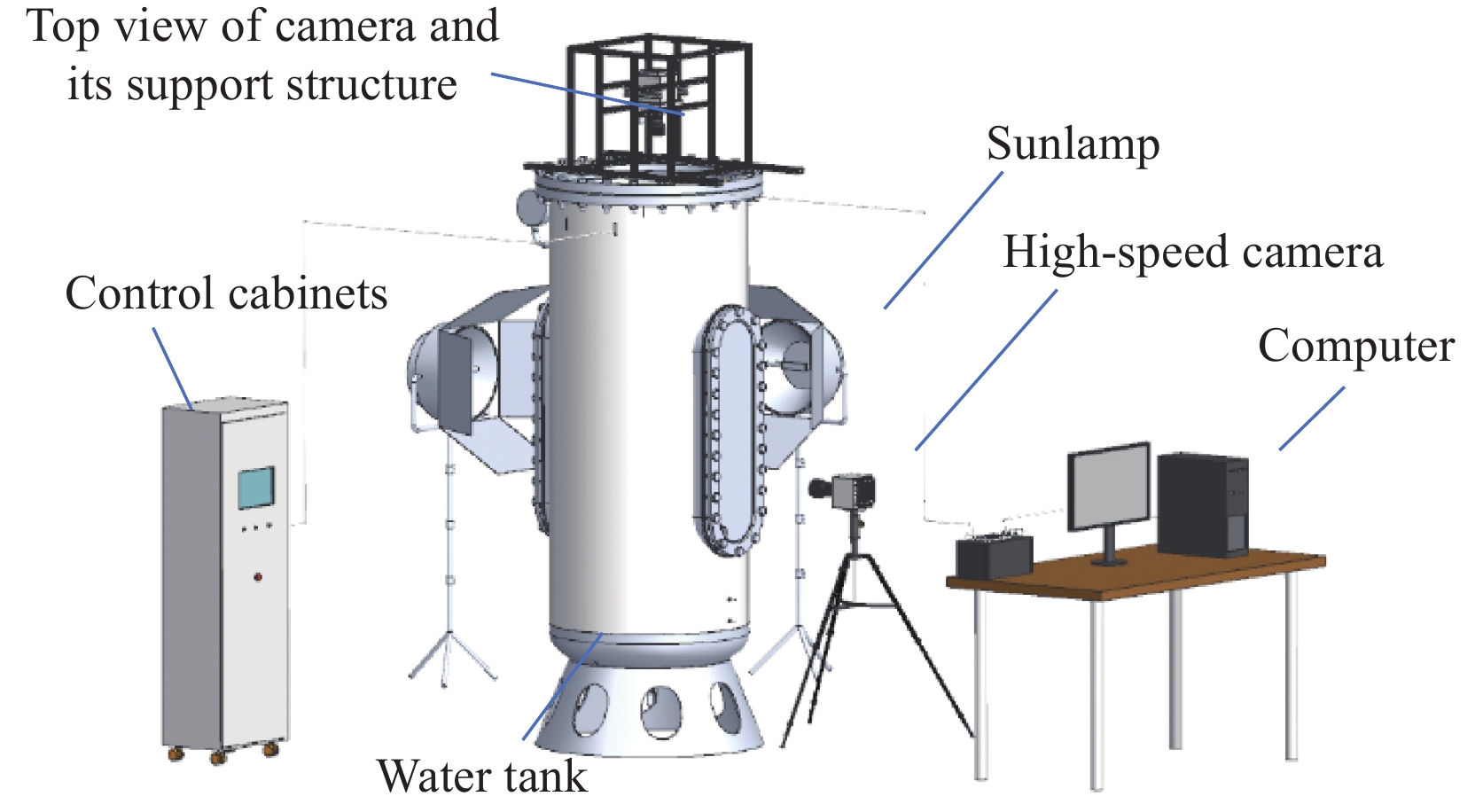
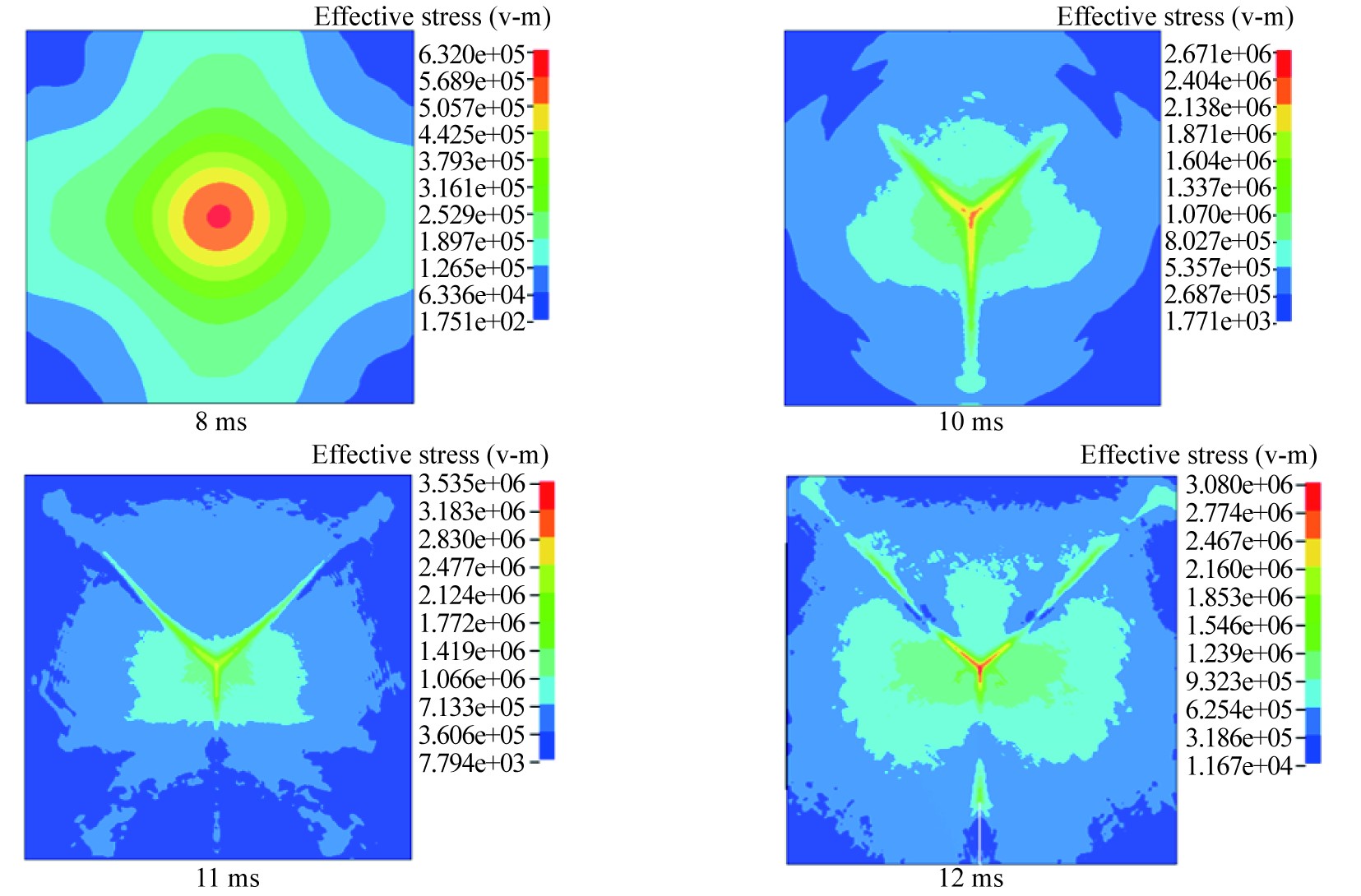
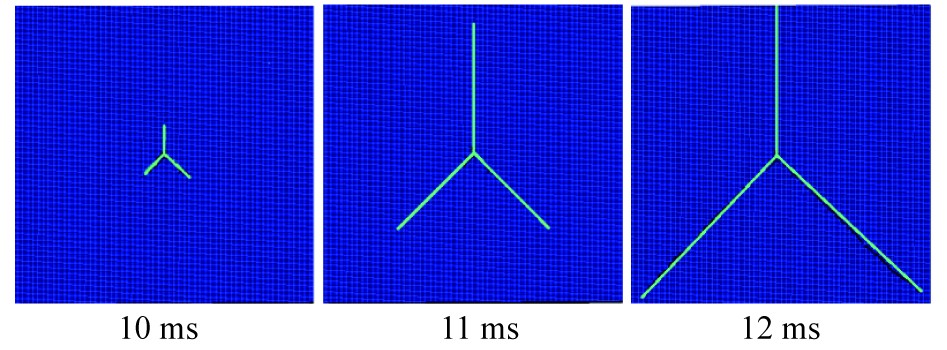
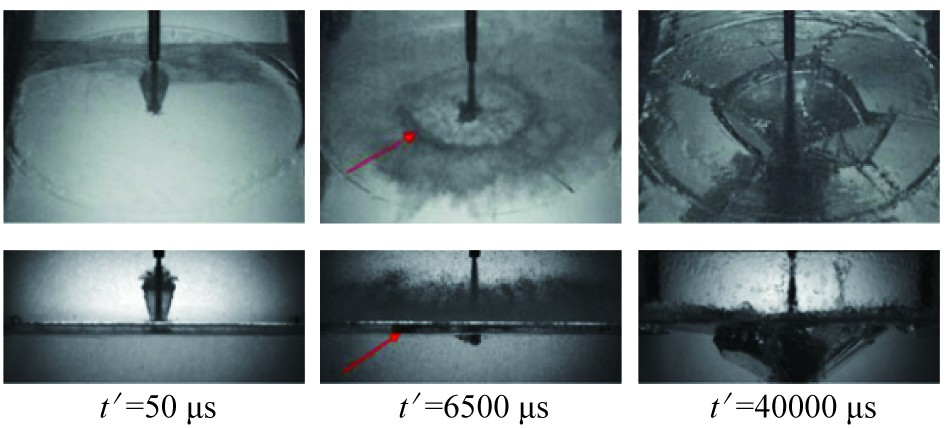
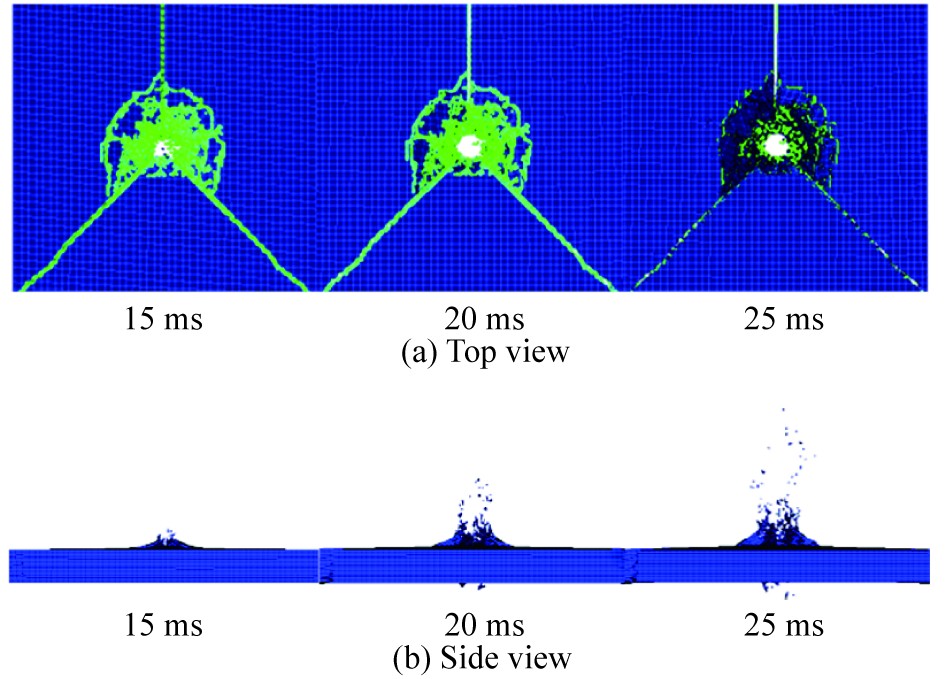
The presence of ice on the water surface significantly influences the load and motion characteristics of vehicles, and ice-breaking water exit is critical for equipment safety in ice-covered regions. However, research remains limited regarding ice-breaking load, motion characteristics, and ice sheet failure modes during vehicle transit through breakable ice sheets. This paper establishes a numerical model for vehicle ice-breaking water exit using the Arbitrary Lagrange-Euler (ALE) method. The numerical model was validated through comparison with small-scale ice-breaking water exit experimental results. Using this model, the study examined how ice thickness and vehicle initial velocity affect ice-breaking load, vehicle motion characteristics, and ice sheet failure modes. The findings demonstrate that ice failure occurs in four distinct stages. Increases in ice thickness and vehicle velocity substantially alter the ice sheet failure mode and result in multiple increases in peak vehicle load. Additionally, the relationship between failure mode and ice sheet stress distribution was analyzed.
The presence of ice on the water surface significantly influences the load and motion characteristics of vehicles, and ice-breaking water exit is critical for equipment safety in ice-covered regions. However, research remains limited regarding ice-breaking load, motion characteristics, and ice sheet failure modes during vehicle transit through breakable ice sheets. This paper establishes a numerical model for vehicle ice-breaking water exit using the Arbitrary Lagrange-Euler (ALE) method. The numerical model was validated through comparison with small-scale ice-breaking water exit experimental results. Using this model, the study examined how ice thickness and vehicle initial velocity affect ice-breaking load, vehicle motion characteristics, and ice sheet failure modes. The findings demonstrate that ice failure occurs in four distinct stages. Increases in ice thickness and vehicle velocity substantially alter the ice sheet failure mode and result in multiple increases in peak vehicle load. Additionally, the relationship between failure mode and ice sheet stress distribution was analyzed.
2026, 40(3)
:494-506.
doi: 10.1007/s13344-026-0038-9
Abstract:
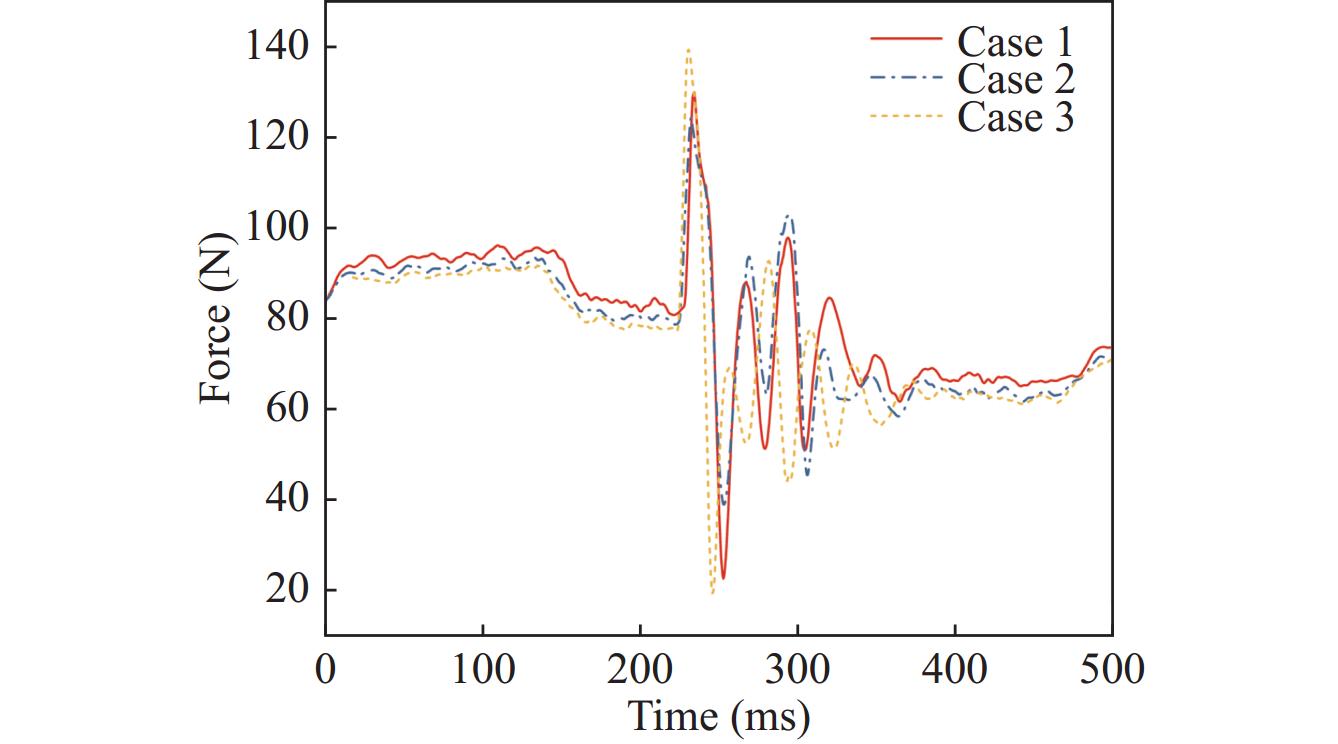
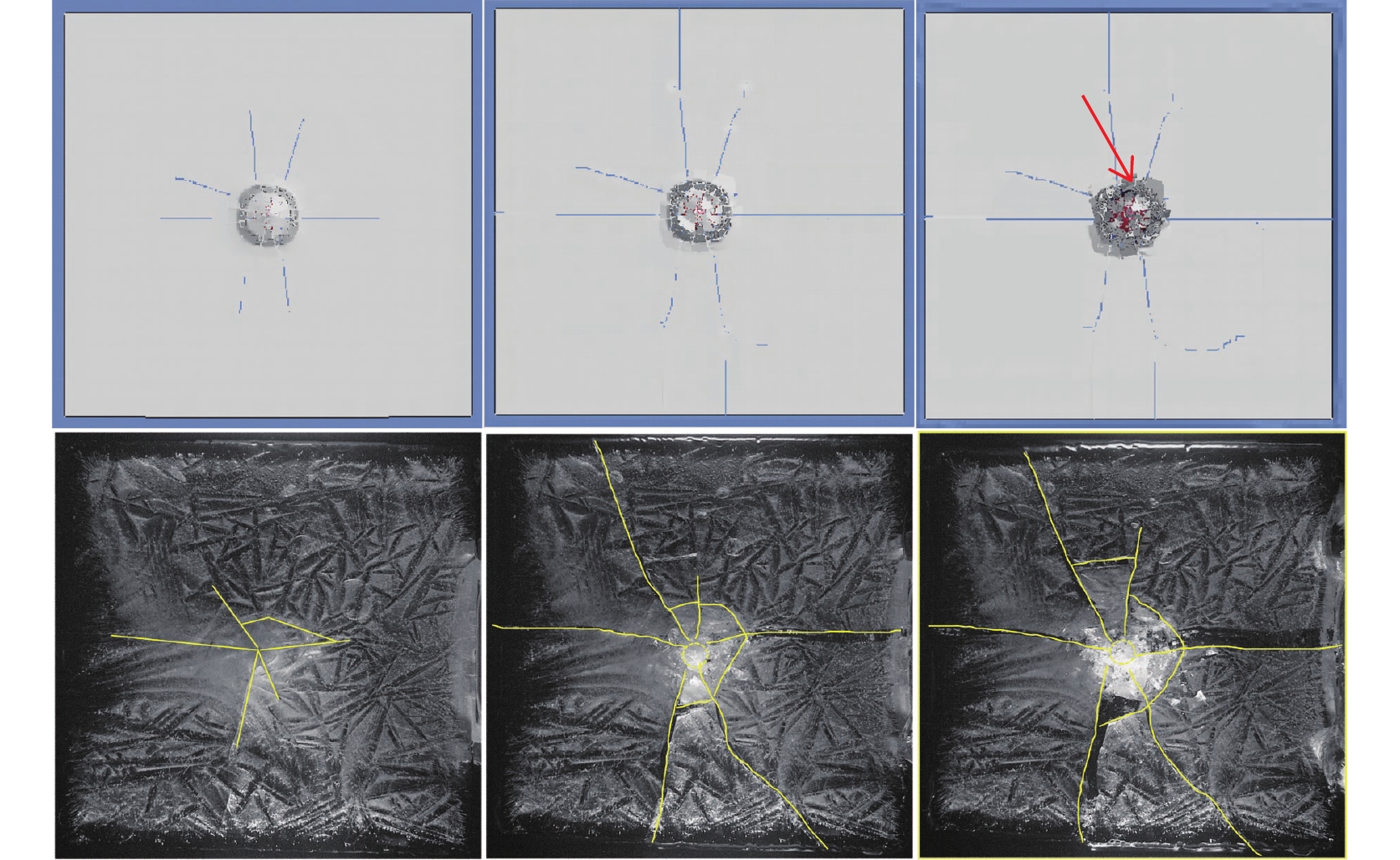
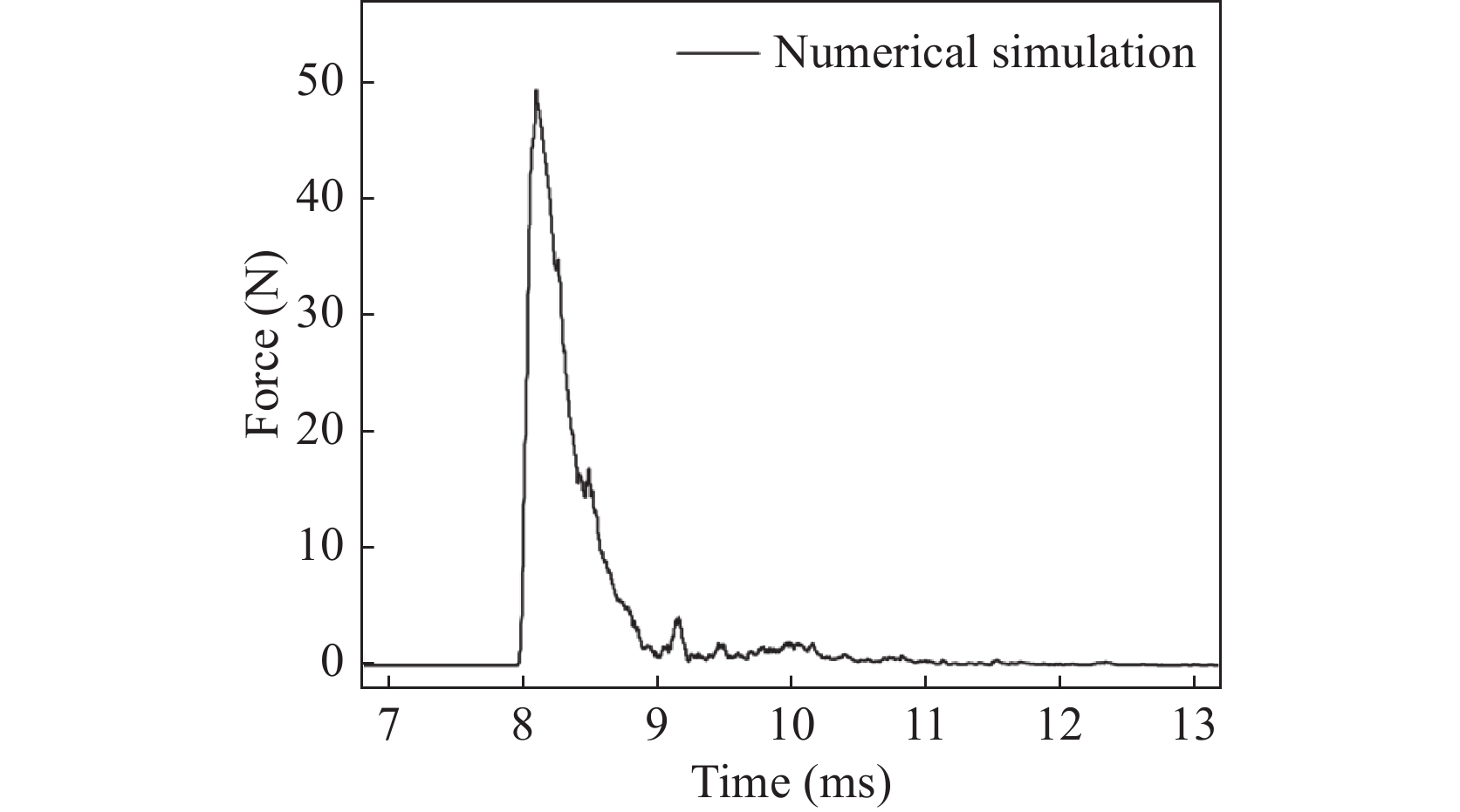
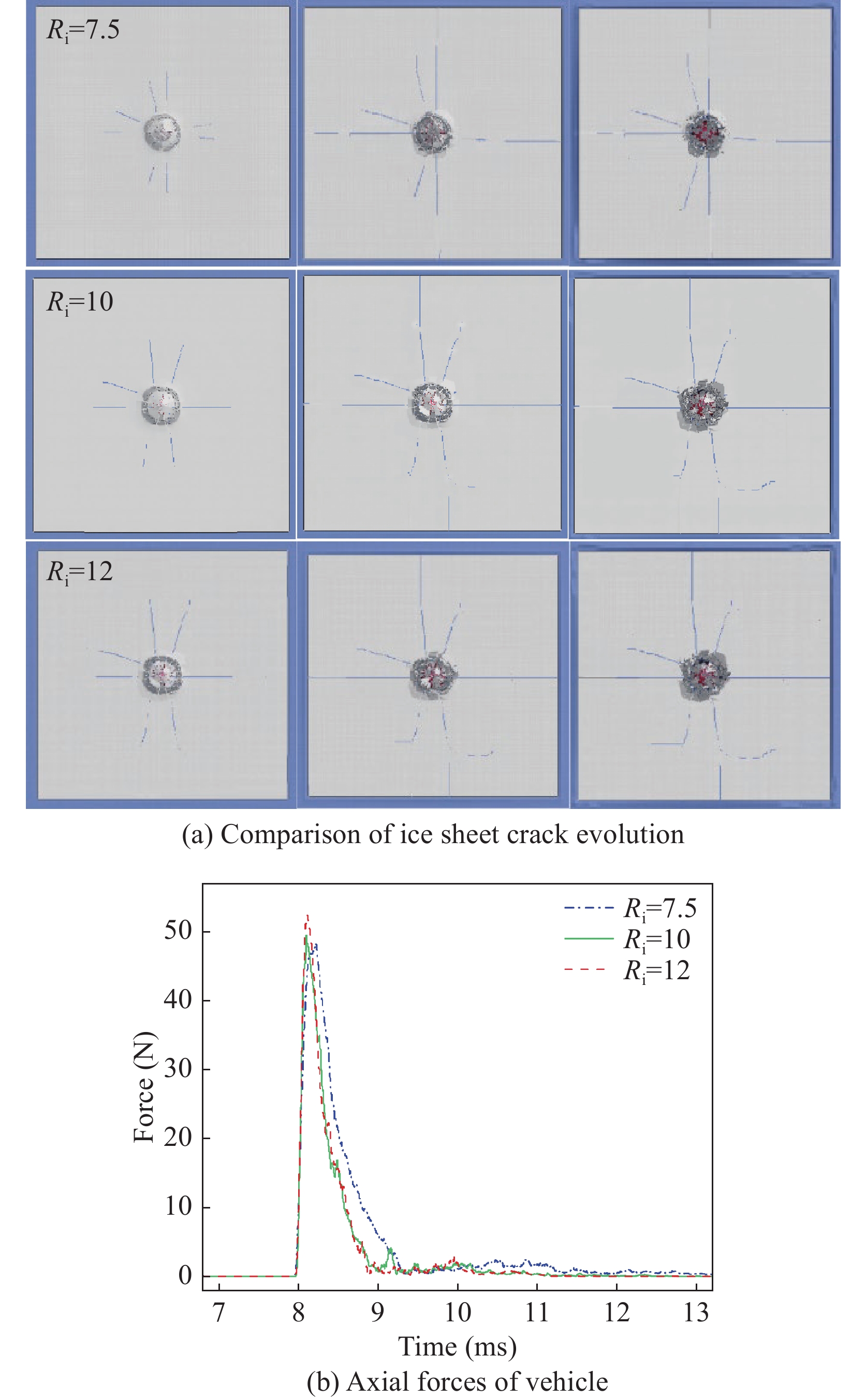
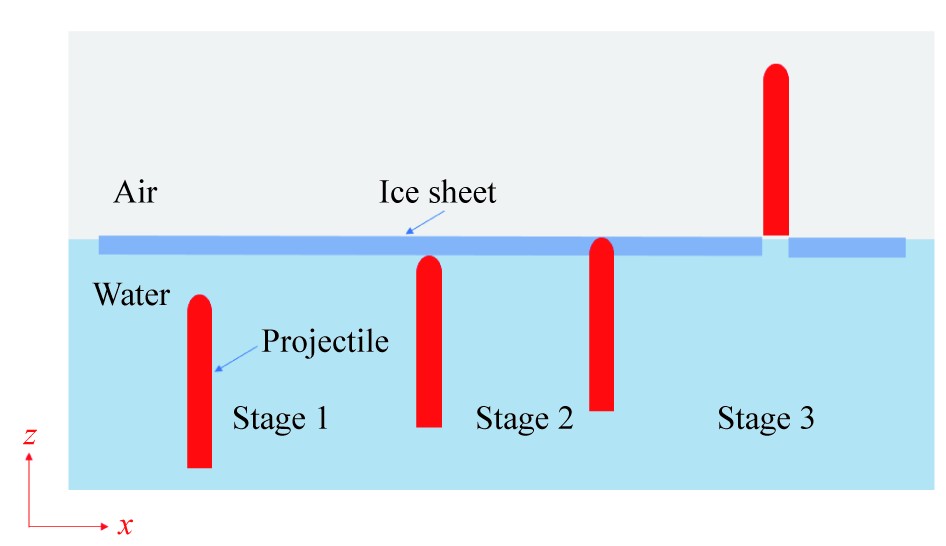
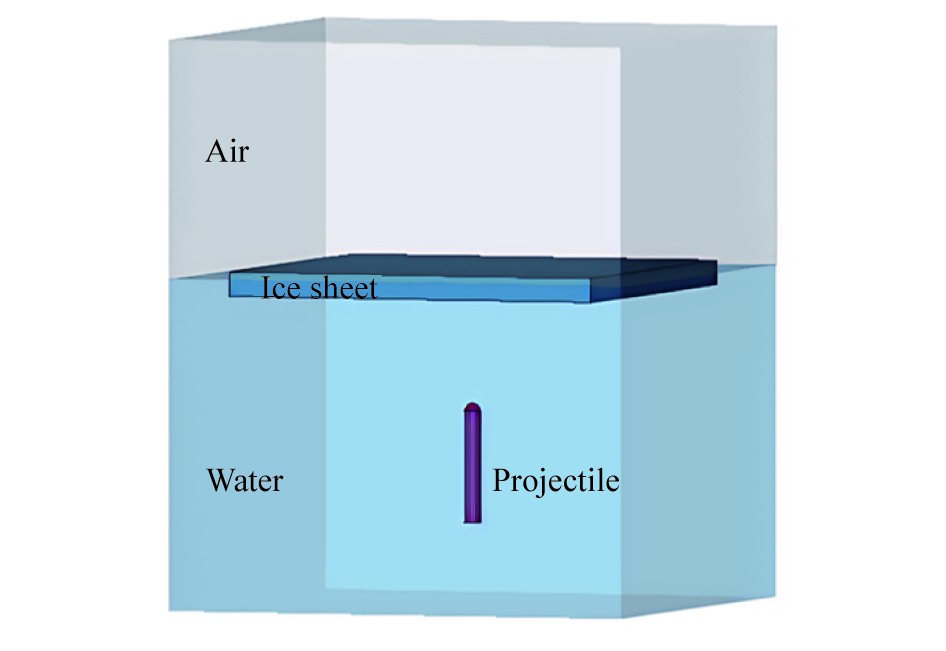
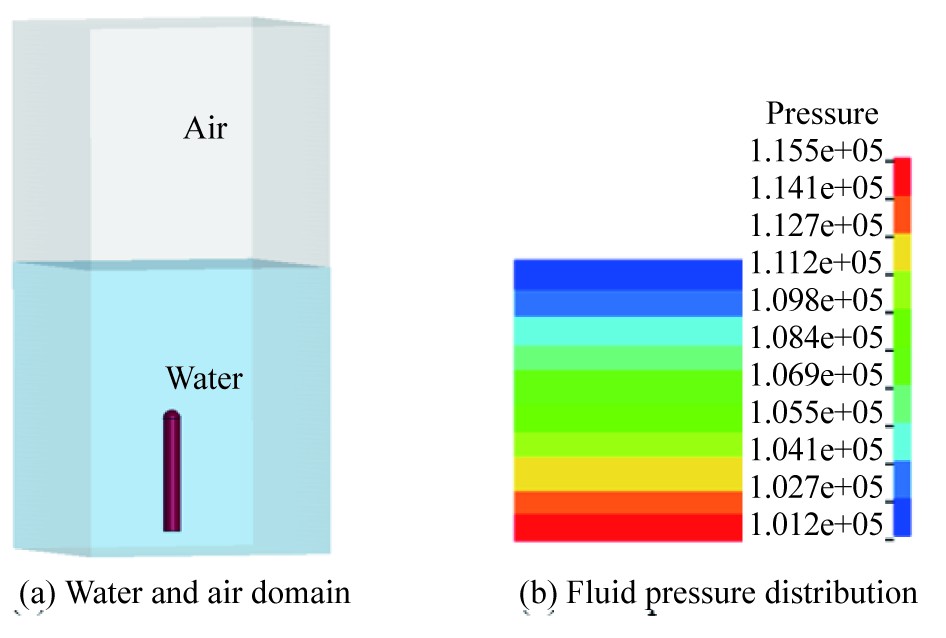
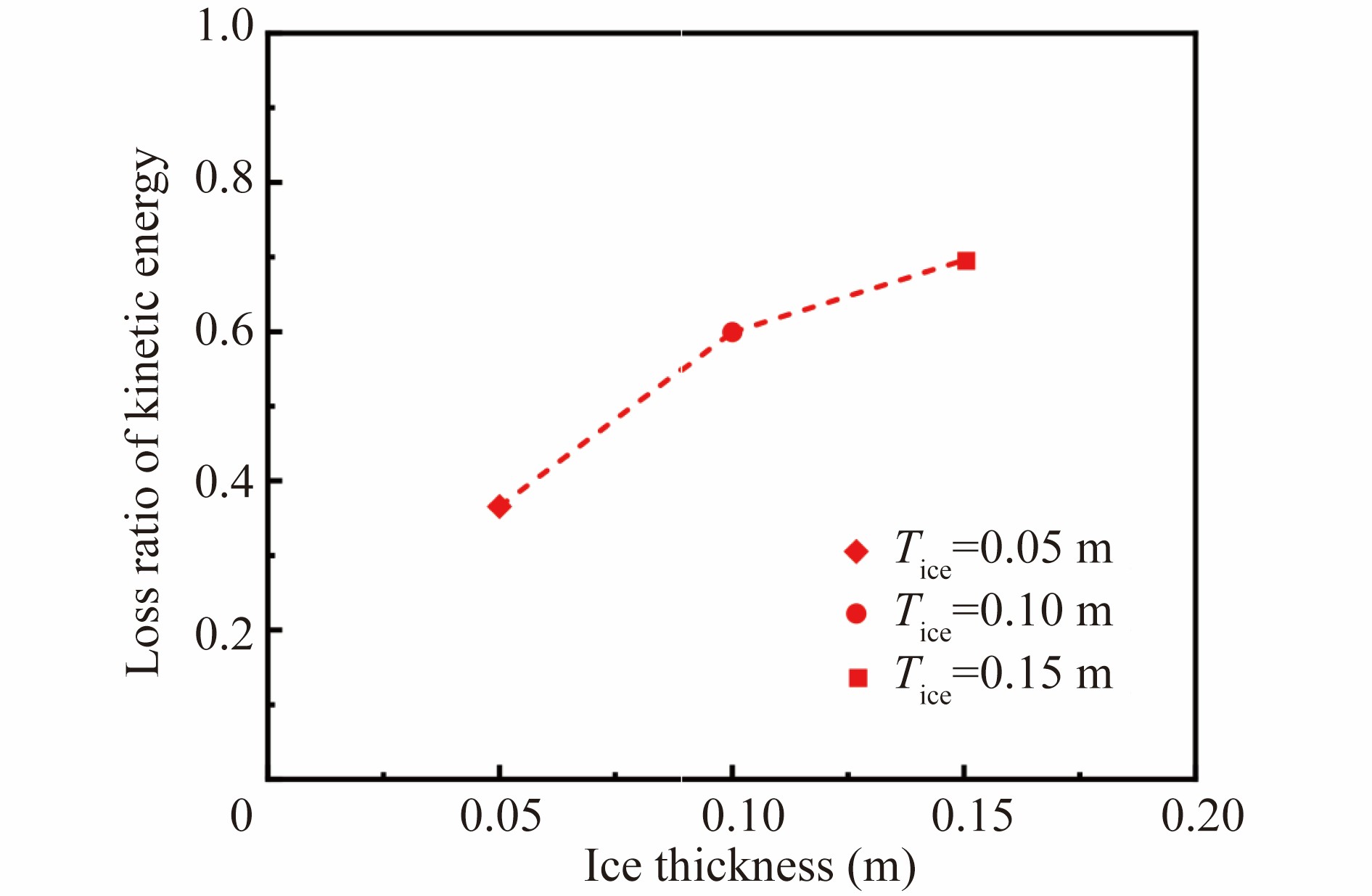
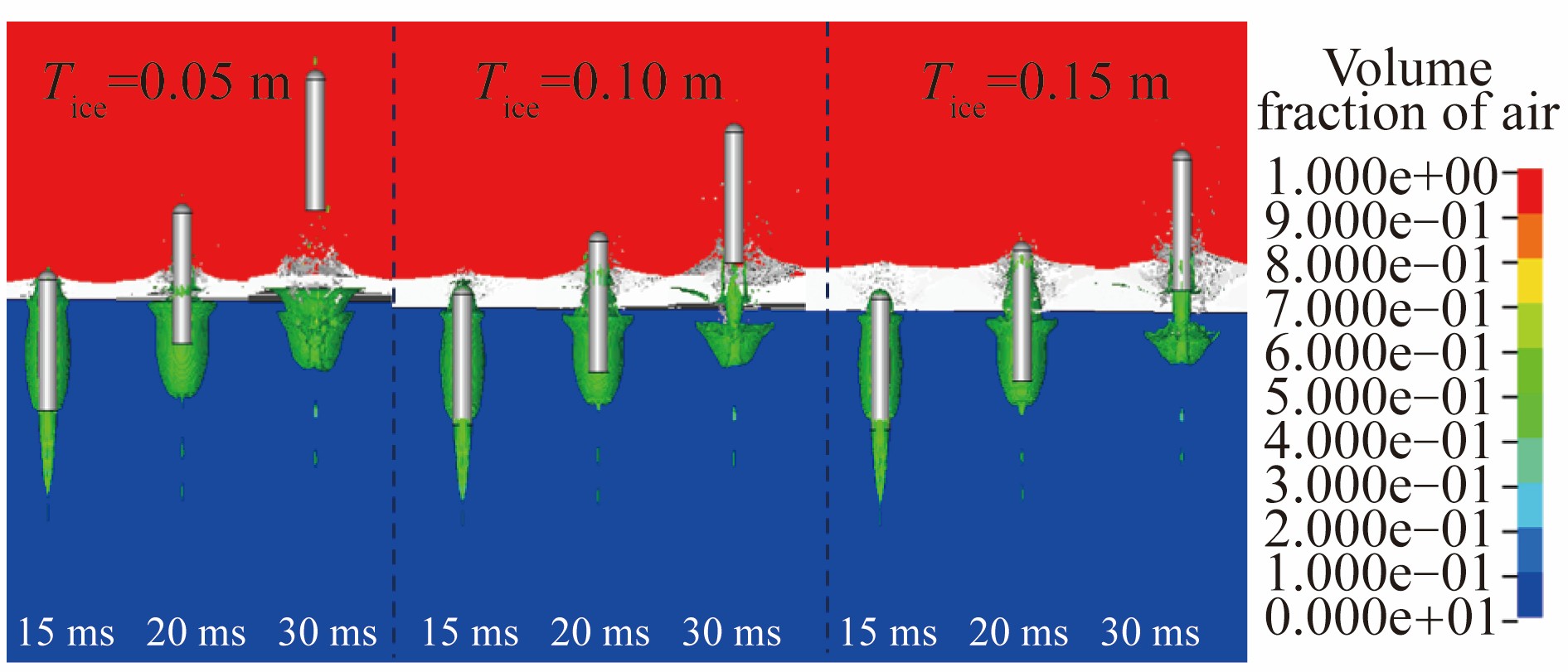
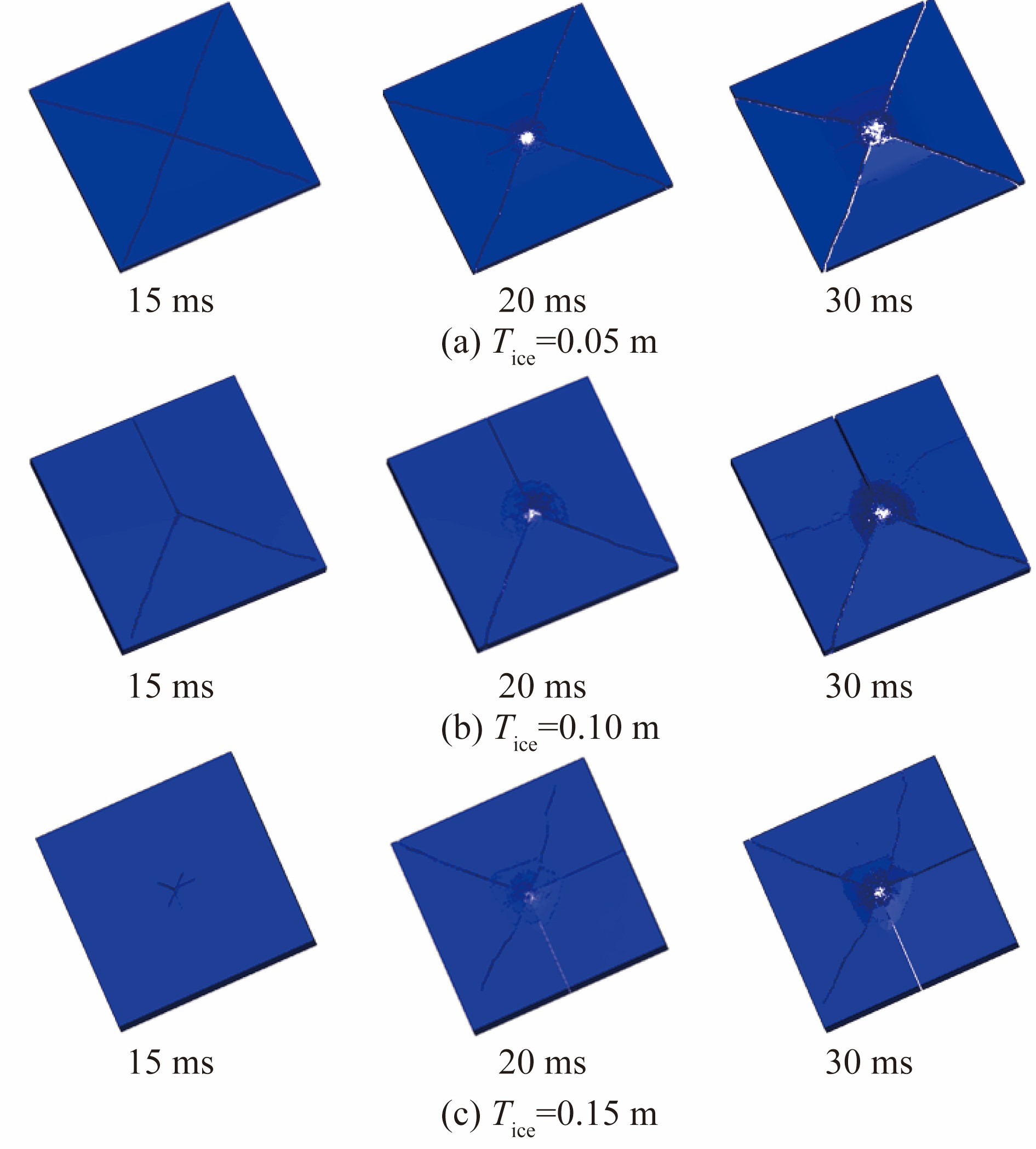
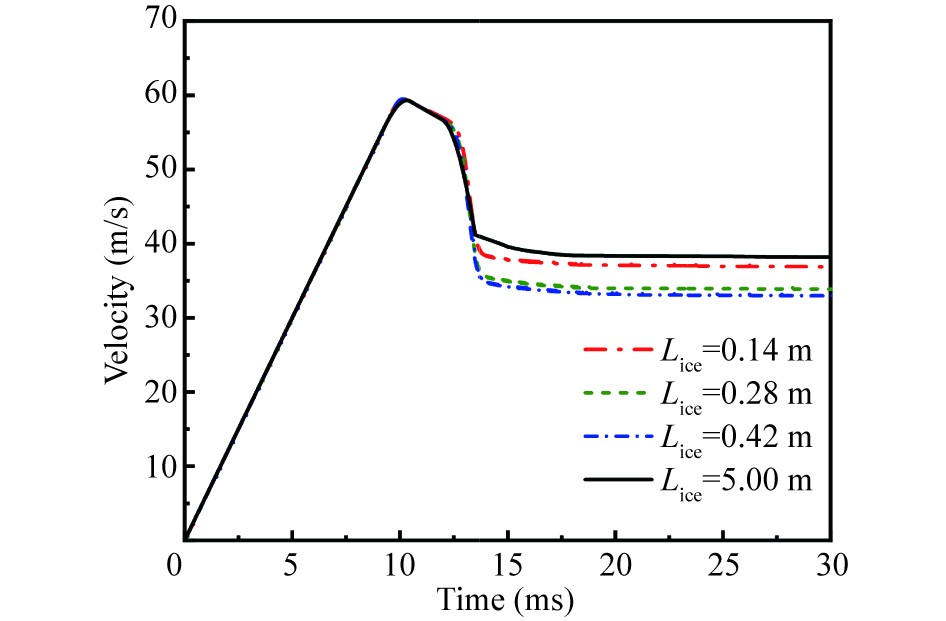
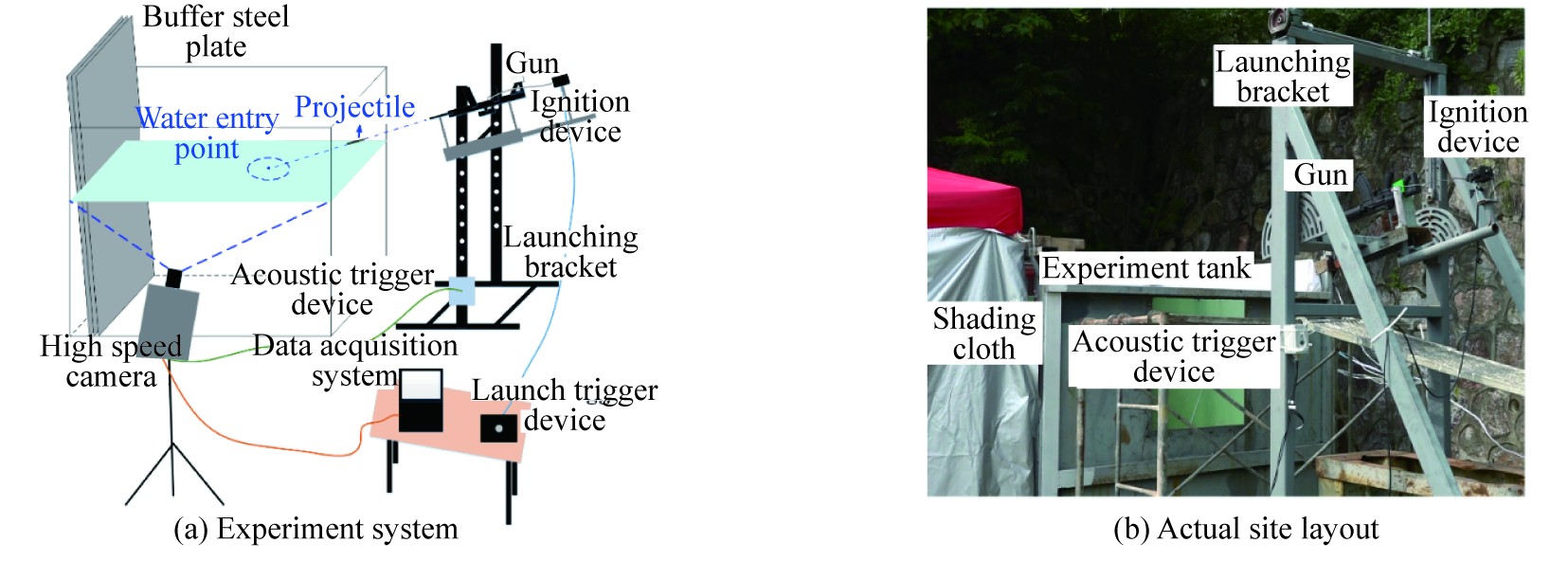
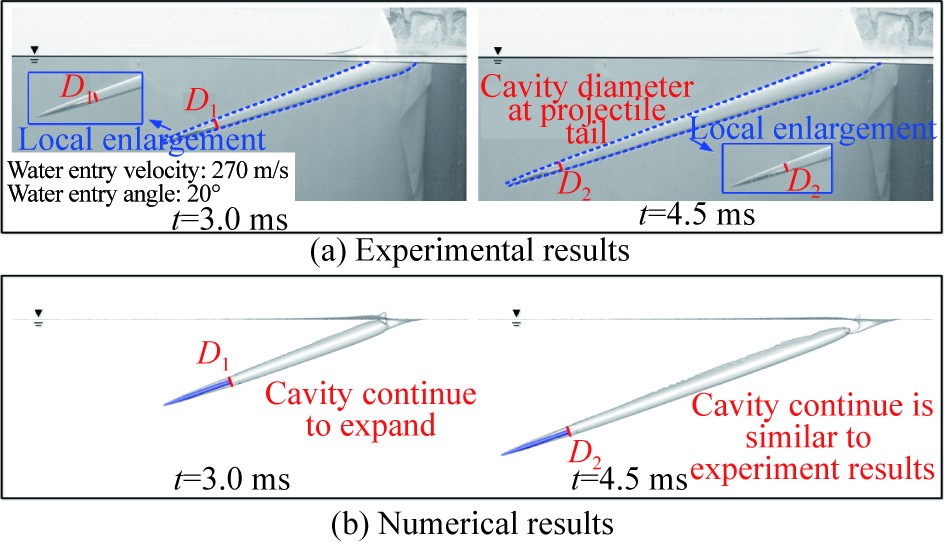
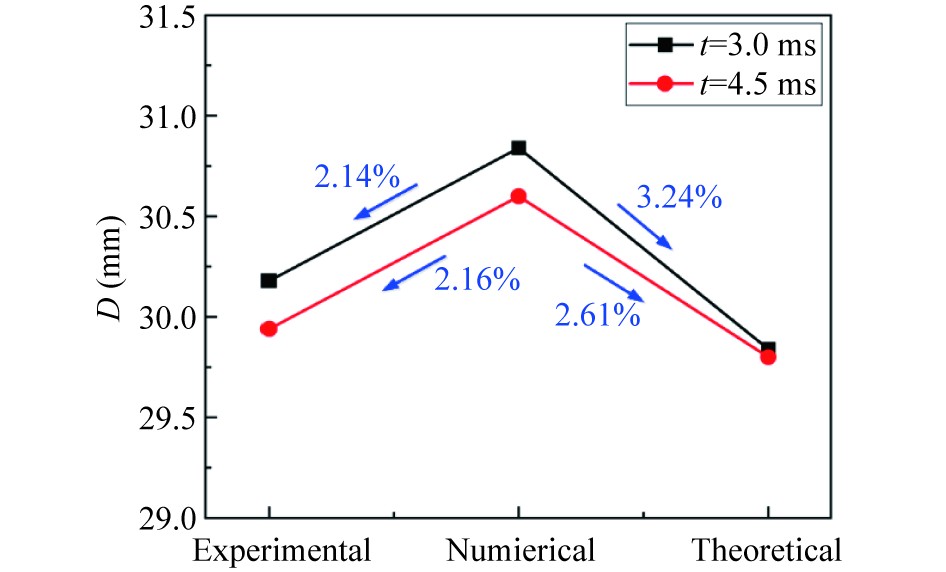
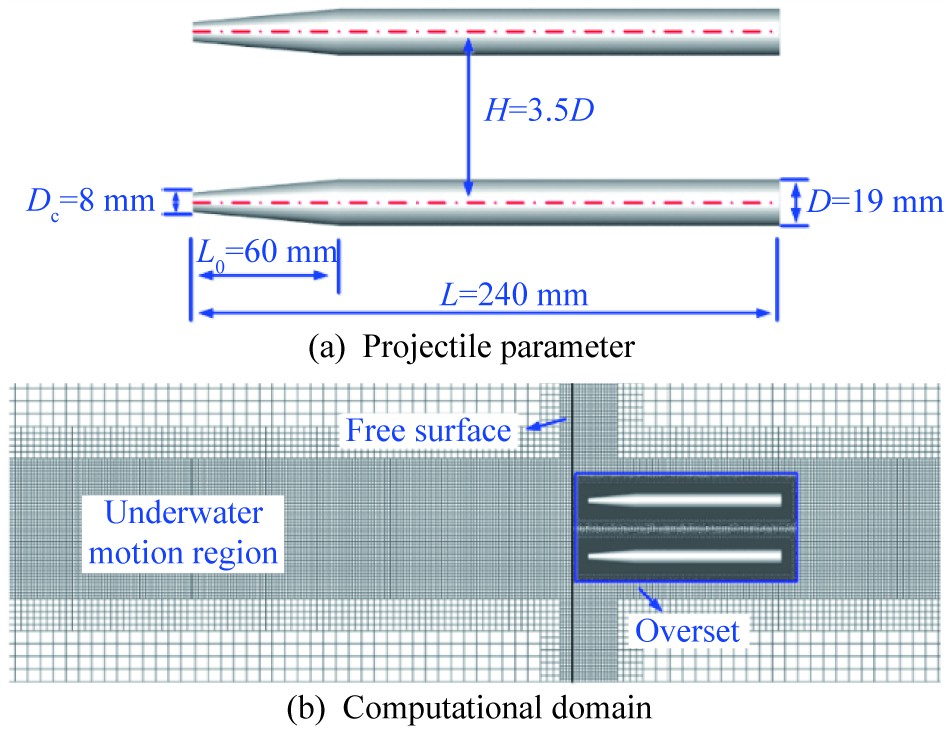
Ice sheets present significant challenges for underwater high-speed projectiles during water exit processes in cold regions. This study investigates the water exit process of an underwater high-speed projectile through ice-covered water using the structured arbitrary Lagrangian-Eulerian (S-ALE) method in LS-DYNA. The ice material model is validated against high-speed impact tests, and the fluid-structure interaction (FSI) model is verified through ice-free water exit experiments. Comparative analyses between ice-free and ice-covered conditions examine projectile motion, cavity evolution, ice forces, and damage patterns. Numerical simulations demonstrate that ice thickness and size significantly influence projectile behavior during water exit. At a launch velocity of 60 m/s with a 0.1 m thick ice sheet, the velocity loss ratio reaches 36.4%, which is 4.28 times larger than that under ice-free conditions. Thin ice (0.05 m) generates larger cavities and extensive cracking, while thicker ice (0.1−0.15 m) constrains crack propagation and reduces cavity dimensions. Size-dependent phenomena indicate that smaller ice blocks (0.14−0.42 m) exhibit crushing failure with higher peak forces, while larger ice sheets (5 m) demonstrate bending-dominated failure with lower force magnitudes. Cavity development shows an inverse relationship with ice size. These findings contribute to underwater projectile design for polar environments and establish groundwork for future studies of environmental-structure interactions in cold regions.
Ice sheets present significant challenges for underwater high-speed projectiles during water exit processes in cold regions. This study investigates the water exit process of an underwater high-speed projectile through ice-covered water using the structured arbitrary Lagrangian-Eulerian (S-ALE) method in LS-DYNA. The ice material model is validated against high-speed impact tests, and the fluid-structure interaction (FSI) model is verified through ice-free water exit experiments. Comparative analyses between ice-free and ice-covered conditions examine projectile motion, cavity evolution, ice forces, and damage patterns. Numerical simulations demonstrate that ice thickness and size significantly influence projectile behavior during water exit. At a launch velocity of 60 m/s with a 0.1 m thick ice sheet, the velocity loss ratio reaches 36.4%, which is 4.28 times larger than that under ice-free conditions. Thin ice (0.05 m) generates larger cavities and extensive cracking, while thicker ice (0.1−0.15 m) constrains crack propagation and reduces cavity dimensions. Size-dependent phenomena indicate that smaller ice blocks (0.14−0.42 m) exhibit crushing failure with higher peak forces, while larger ice sheets (5 m) demonstrate bending-dominated failure with lower force magnitudes. Cavity development shows an inverse relationship with ice size. These findings contribute to underwater projectile design for polar environments and establish groundwork for future studies of environmental-structure interactions in cold regions.
2026, 40(3)
:507-520.
doi: 10.1007/s13344-026-0039-8
Abstract:
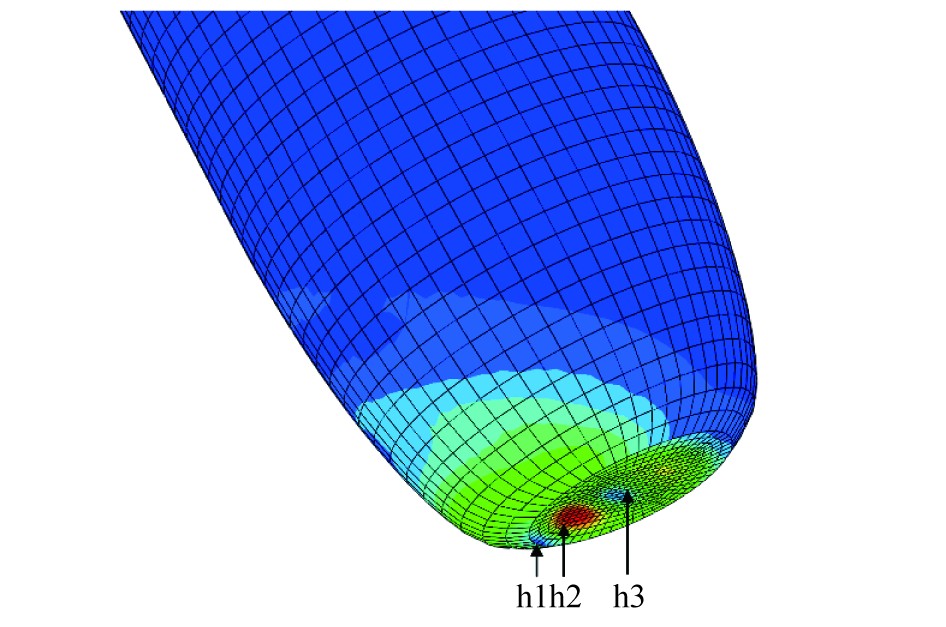
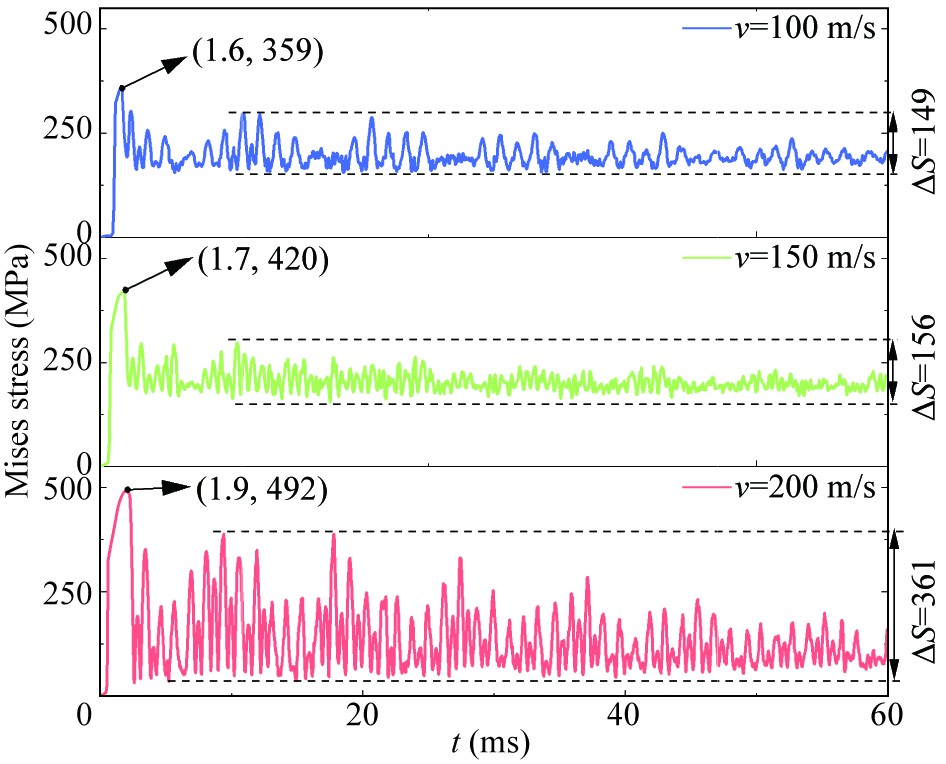
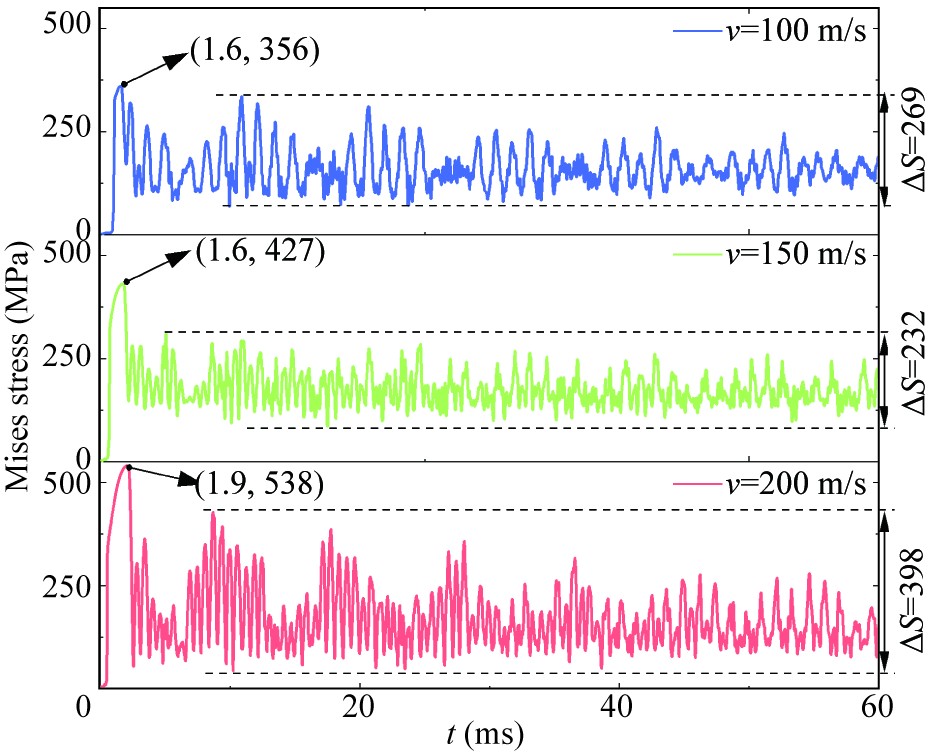
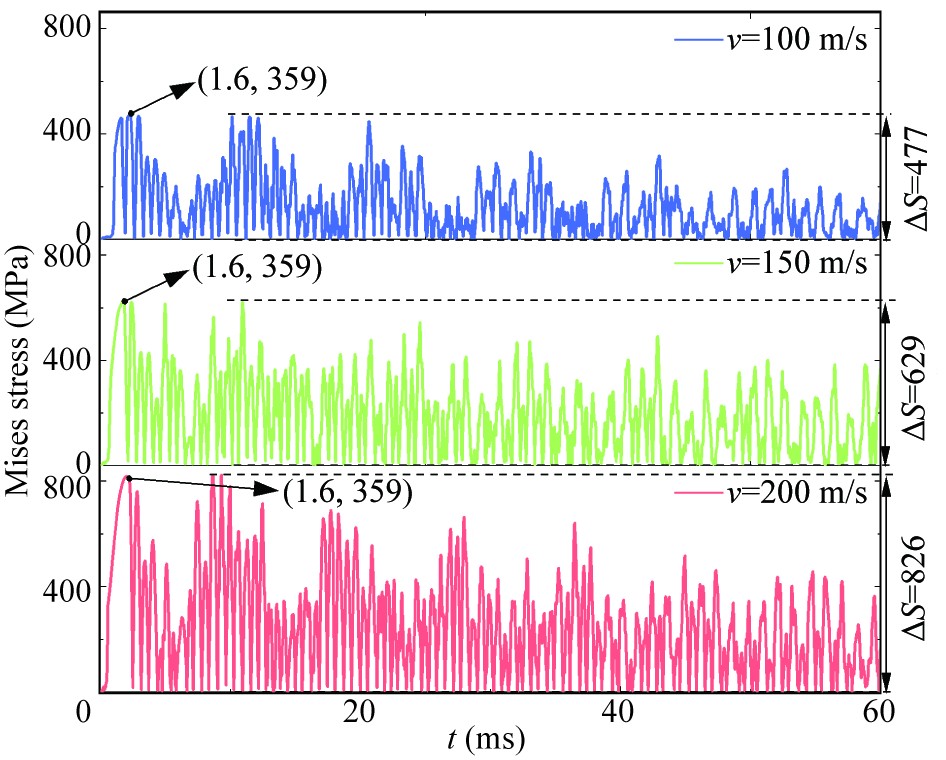
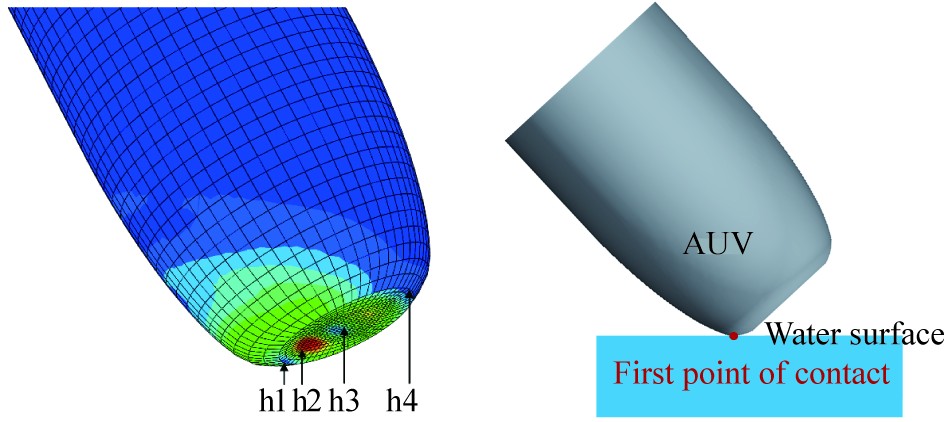
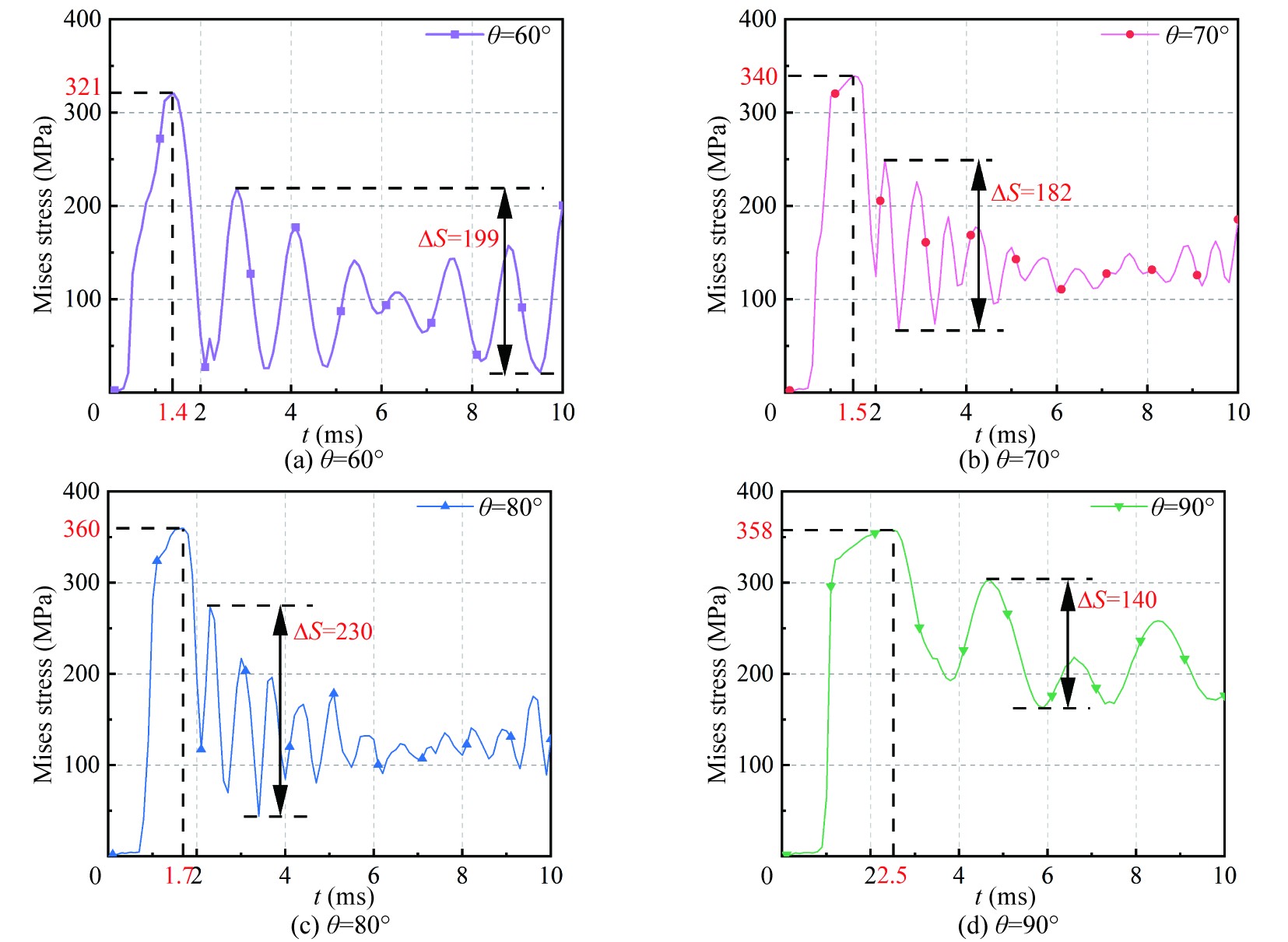
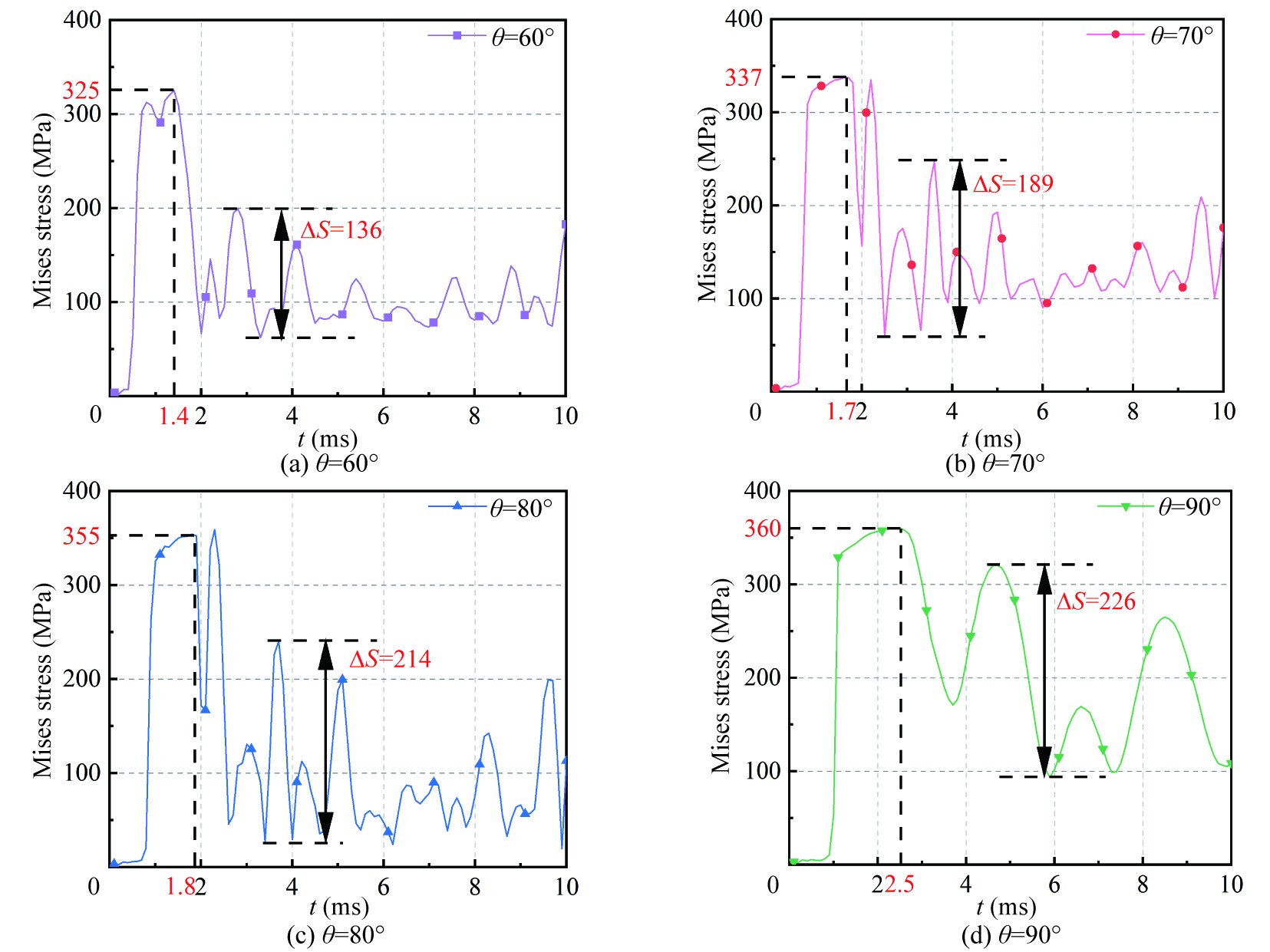
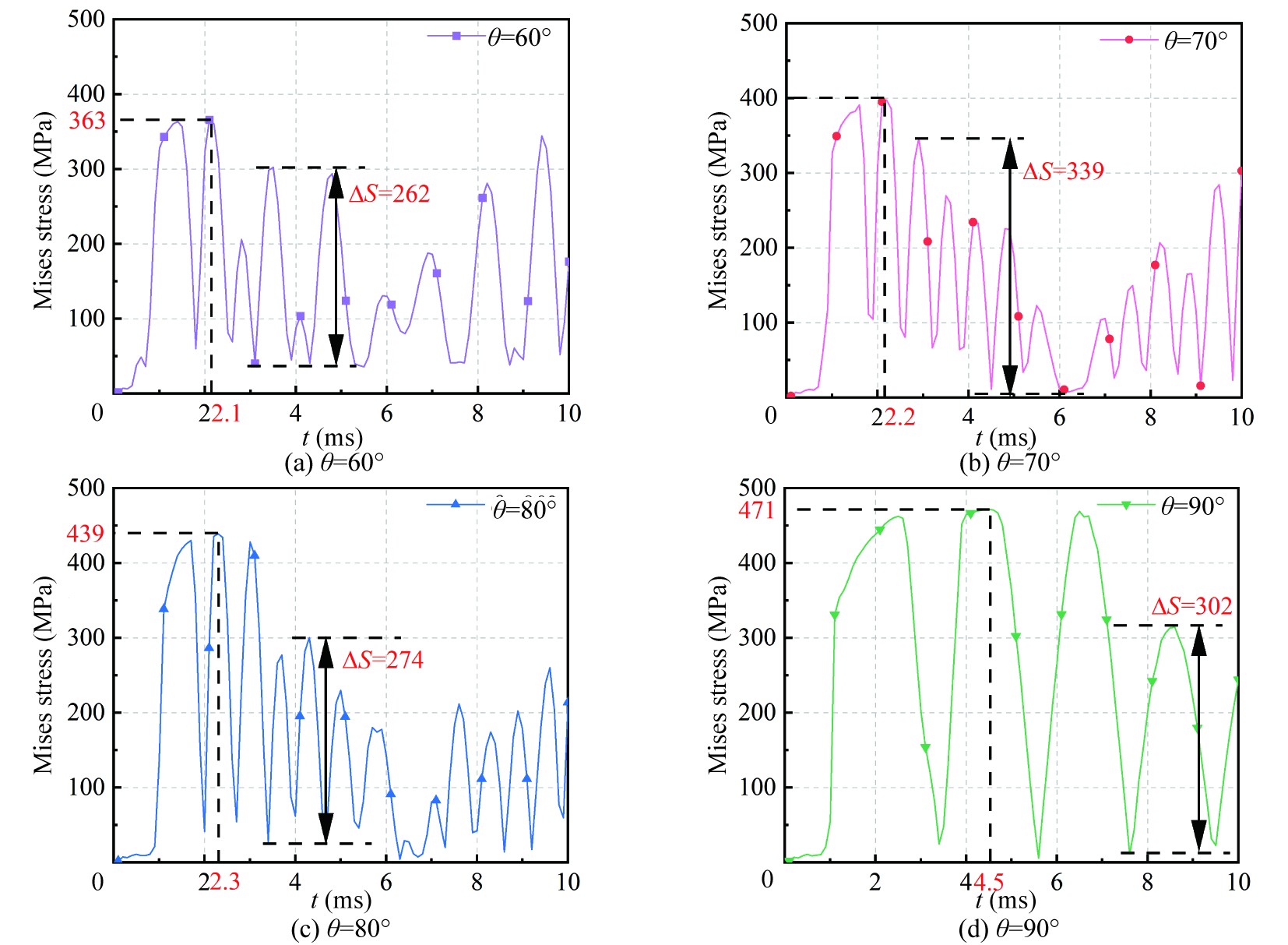
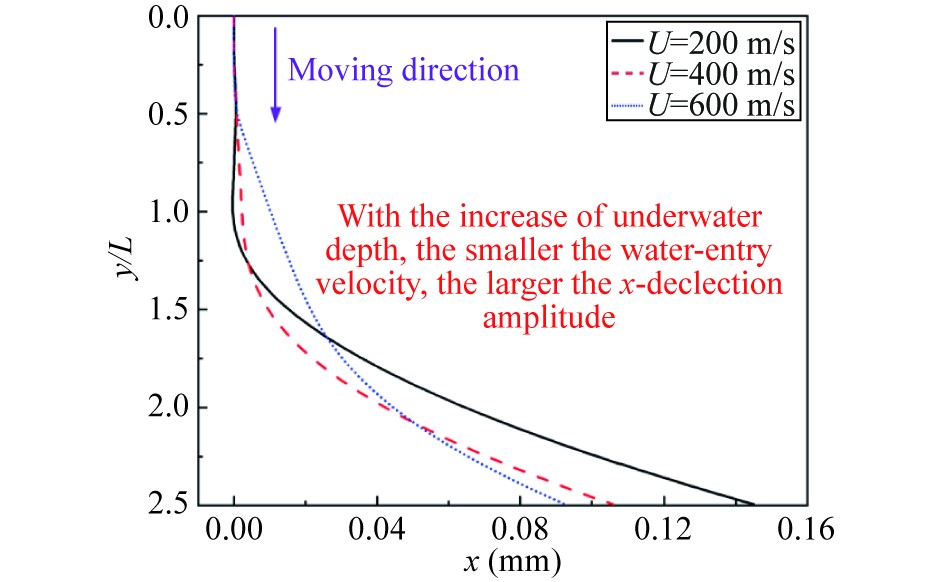
Understanding the structural response of Autonomous Underwater Vehicles (AUVs) during water entry is essential for ensuring operational safety and reliability. This paper introduces a bidirectional fluid-structure coupling numerical algorithm to analyze the structural response characteristics of an AUV during water entry at various speeds and angles. The numerical method’s accuracy is verified through experimental data. The investigation focuses on the water entry process within the velocity range of 50 to 200 m/s and entry angles between 60° and 90°. The study examines the influence of structural position, entry velocity, and entry angle on the structural response, while analyzing stress and strain at specific locations on the circular end face, cylindrical side, and circular tail surface of the AUV. The findings demonstrate that at entry speeds exceeding 100 m/s, the structure undergoes strain, with entry velocity exhibiting a more pronounced effect on axial force compared with entry angle. A reduced entry angle decreases the initial water contact duration and minimizes stress concentration. These results provide significant theoretical foundations for AUV structural design.
Understanding the structural response of Autonomous Underwater Vehicles (AUVs) during water entry is essential for ensuring operational safety and reliability. This paper introduces a bidirectional fluid-structure coupling numerical algorithm to analyze the structural response characteristics of an AUV during water entry at various speeds and angles. The numerical method’s accuracy is verified through experimental data. The investigation focuses on the water entry process within the velocity range of 50 to 200 m/s and entry angles between 60° and 90°. The study examines the influence of structural position, entry velocity, and entry angle on the structural response, while analyzing stress and strain at specific locations on the circular end face, cylindrical side, and circular tail surface of the AUV. The findings demonstrate that at entry speeds exceeding 100 m/s, the structure undergoes strain, with entry velocity exhibiting a more pronounced effect on axial force compared with entry angle. A reduced entry angle decreases the initial water contact duration and minimizes stress concentration. These results provide significant theoretical foundations for AUV structural design.
2026, 40(3)
:521-534.
doi: 10.1007/s13344-026-0040-2
Abstract:
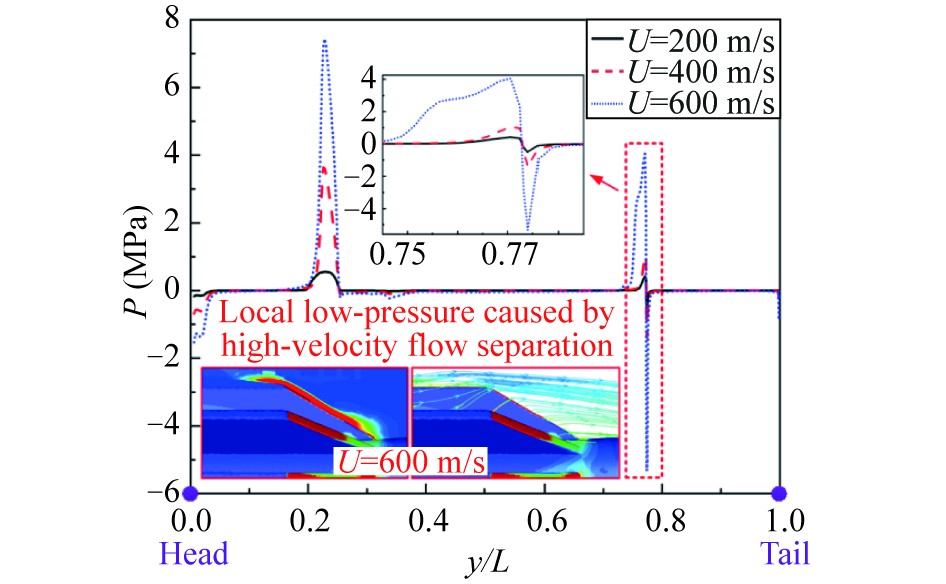
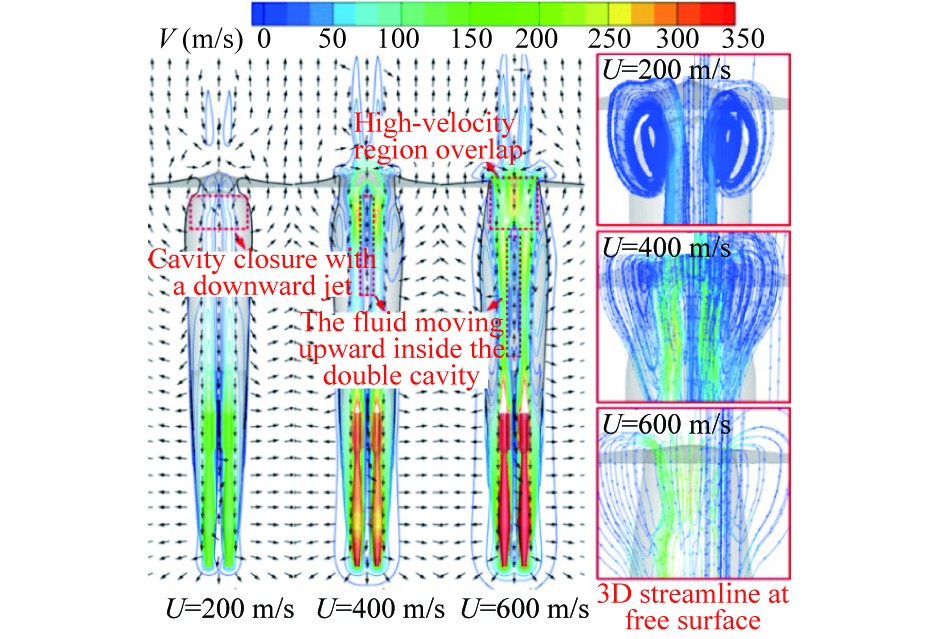
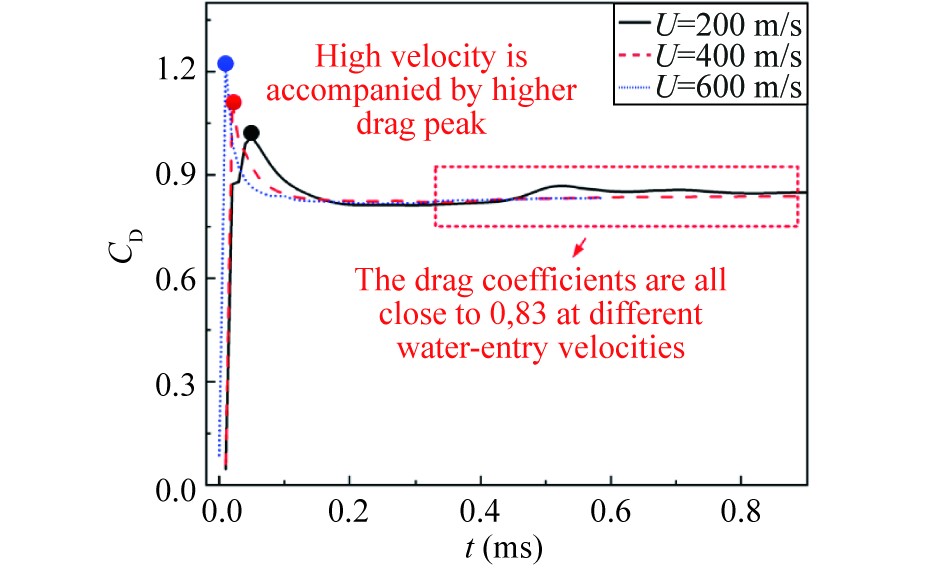
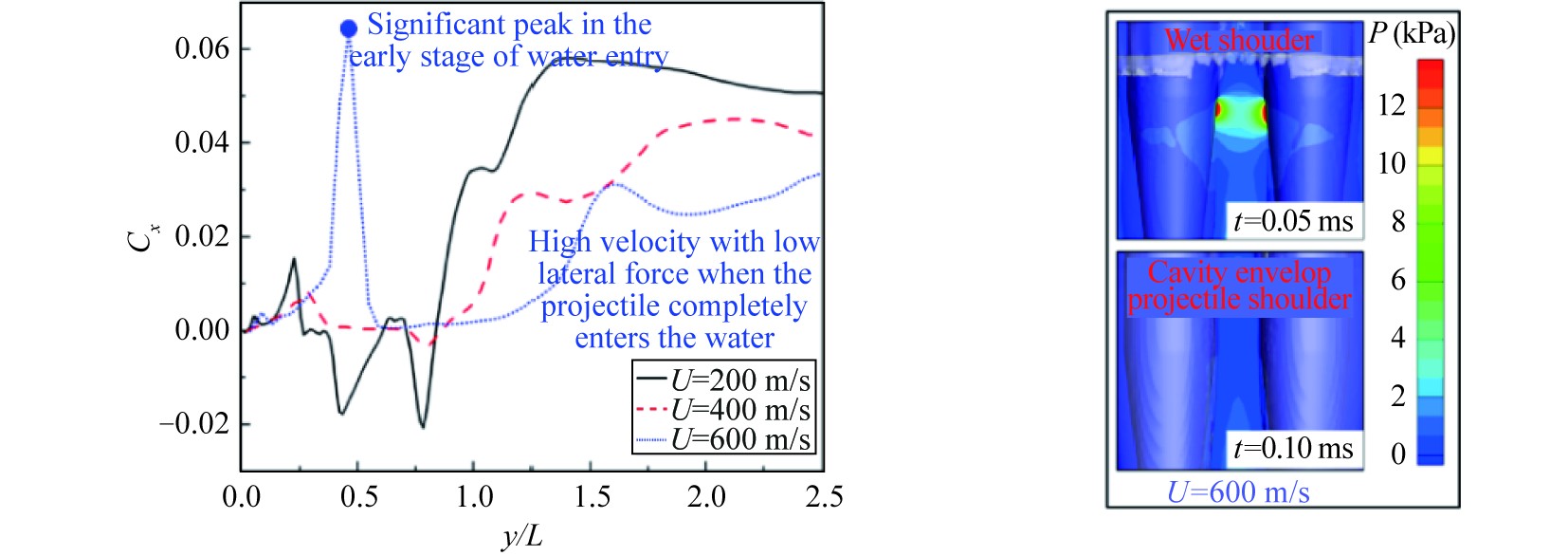
The water entry of multiple projectiles generates complex motion interference and cavity coupling between bodies, resulting in intricate flow field structures and motion characteristics. This study presents a computational fluid dynamics (CFD) approach for simulating the hydrodynamic properties of high-speed vertical water entry by parallel projectiles. The numerical method’s validity is verified through experimental comparisons. The study investigates the interference characteristics of parallel projectiles in terms of axis distance, time interval, and water-entry velocity, and compares these behaviors with those of a single projectile. The numerical results reveal that parallel projectile water entry exhibits more complex characteristics, including cavity coupling, surface wetting, and load variations. At G=1.5, extensive shoulder wetting produces substantial lateral forces and yaw moments, affecting both projectiles’ attitudes. This negatively impacts underwater trajectory stability and targeting precision. In supercavitating conditions (G≥6), multi-disturbances become negligible. The wake of the leading projectile generates a non-uniform initial flow field for the trailing projectile, while the entry of the trailing projectile subsequently influences the motion of the leading one. This mutual interaction is most pronounced at small time intervals (Δt=0.2 ms). Notably, water-entry velocity exerts less influence on the hydrodynamic characteristics than axis distance and time interval.
The water entry of multiple projectiles generates complex motion interference and cavity coupling between bodies, resulting in intricate flow field structures and motion characteristics. This study presents a computational fluid dynamics (CFD) approach for simulating the hydrodynamic properties of high-speed vertical water entry by parallel projectiles. The numerical method’s validity is verified through experimental comparisons. The study investigates the interference characteristics of parallel projectiles in terms of axis distance, time interval, and water-entry velocity, and compares these behaviors with those of a single projectile. The numerical results reveal that parallel projectile water entry exhibits more complex characteristics, including cavity coupling, surface wetting, and load variations. At G=1.5, extensive shoulder wetting produces substantial lateral forces and yaw moments, affecting both projectiles’ attitudes. This negatively impacts underwater trajectory stability and targeting precision. In supercavitating conditions (G≥6), multi-disturbances become negligible. The wake of the leading projectile generates a non-uniform initial flow field for the trailing projectile, while the entry of the trailing projectile subsequently influences the motion of the leading one. This mutual interaction is most pronounced at small time intervals (Δt=0.2 ms). Notably, water-entry velocity exerts less influence on the hydrodynamic characteristics than axis distance and time interval.


2026, 40(3)
:535-546.
doi: 10.1007/s13344-026-0041-1
Abstract:
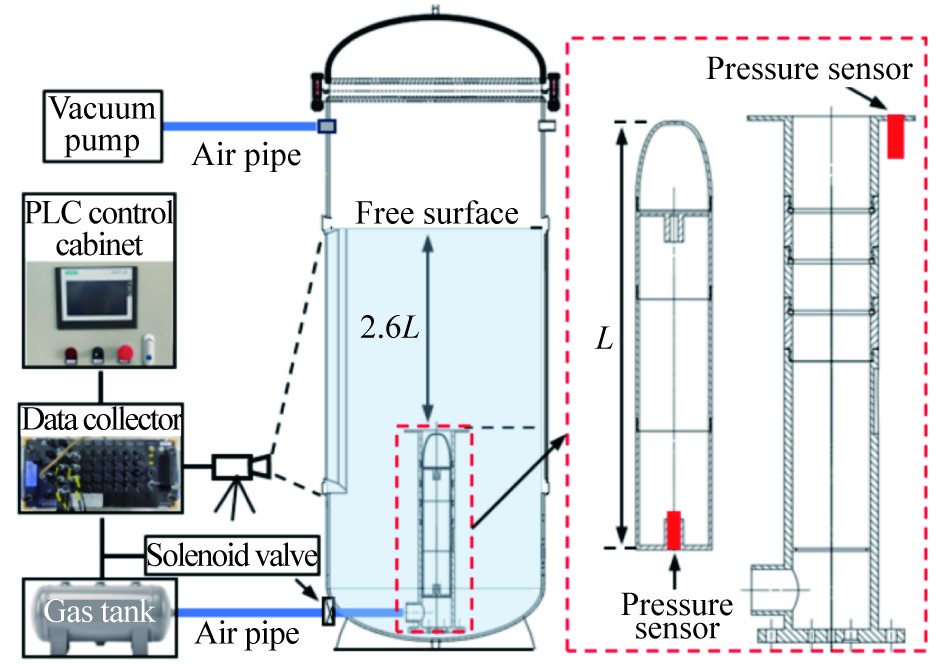
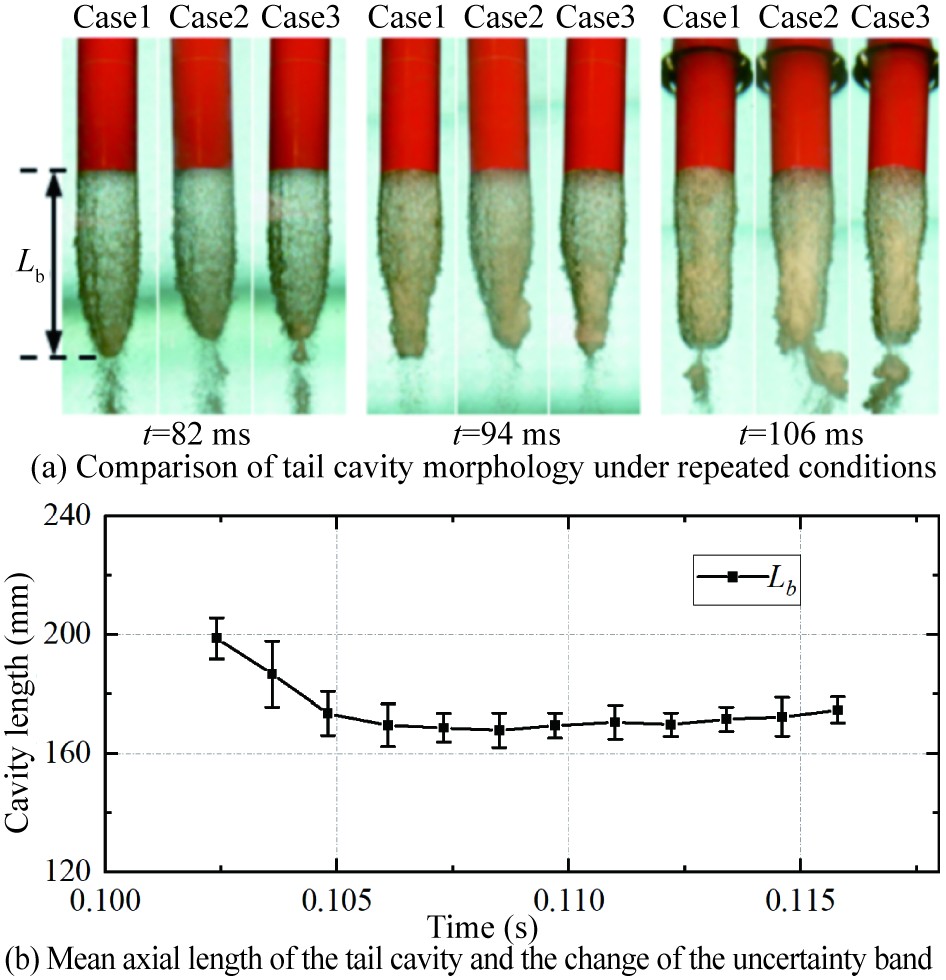
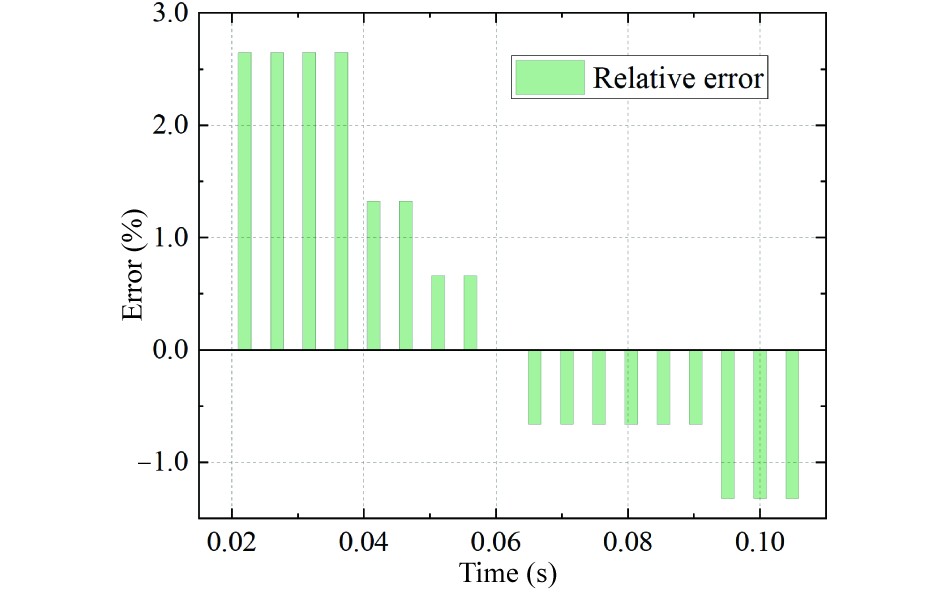
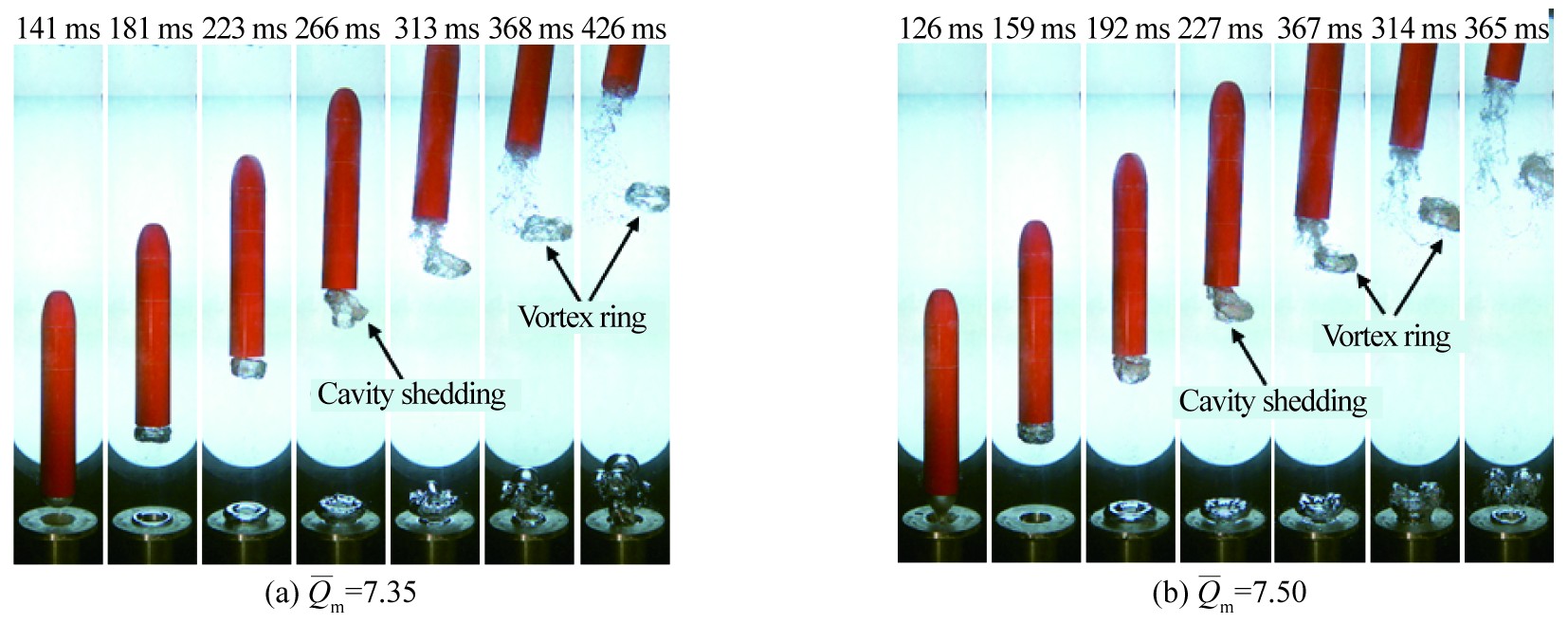
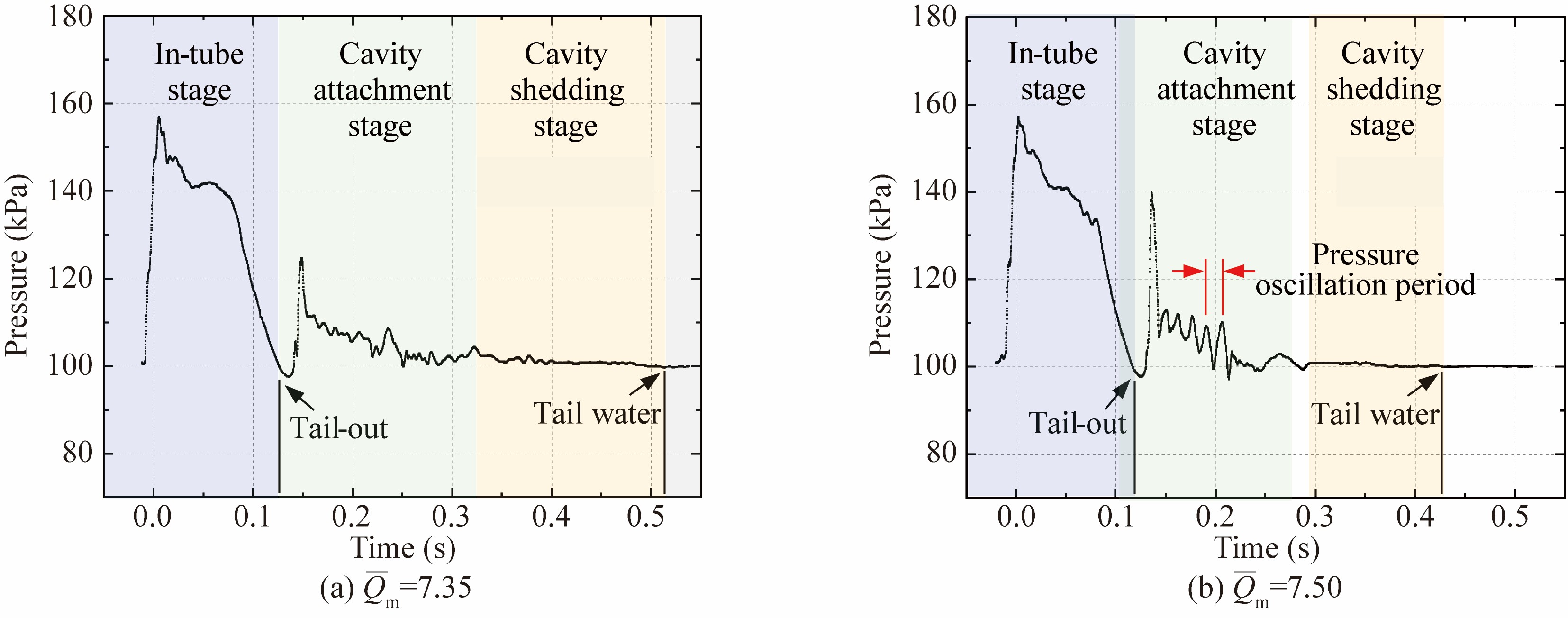
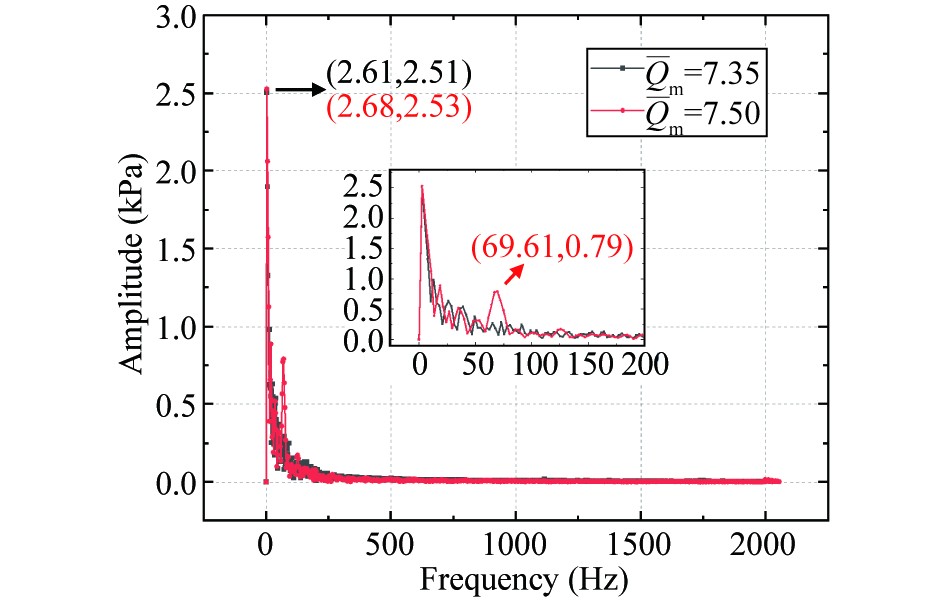
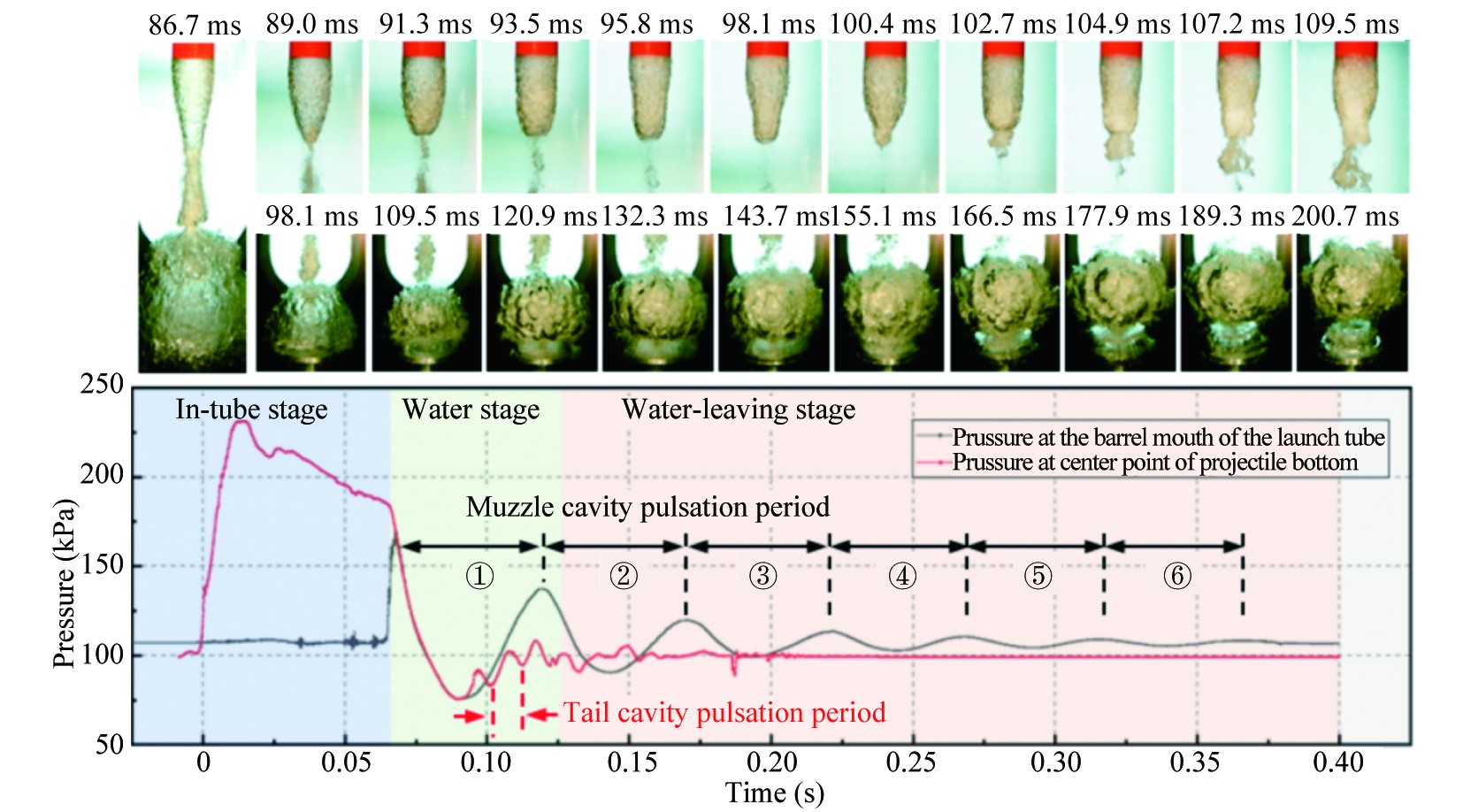
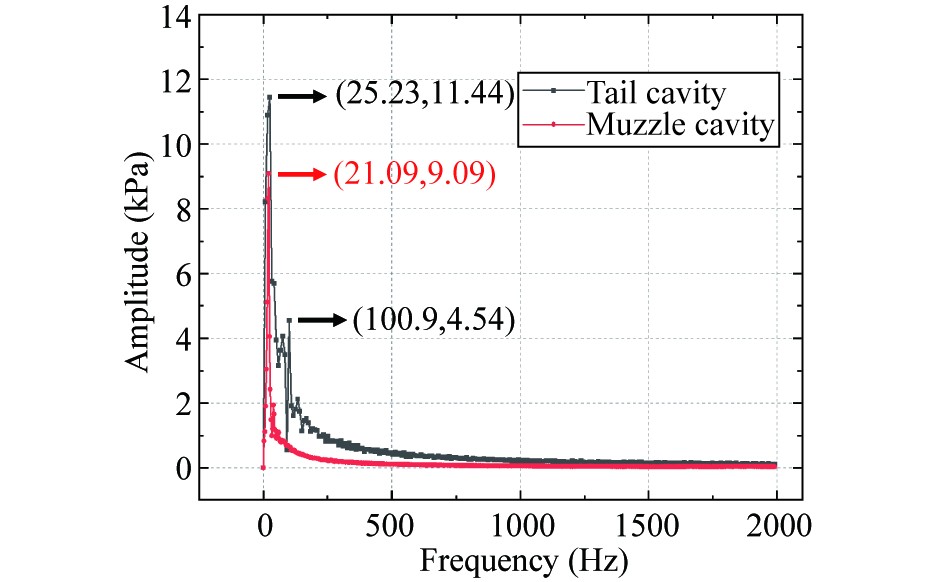
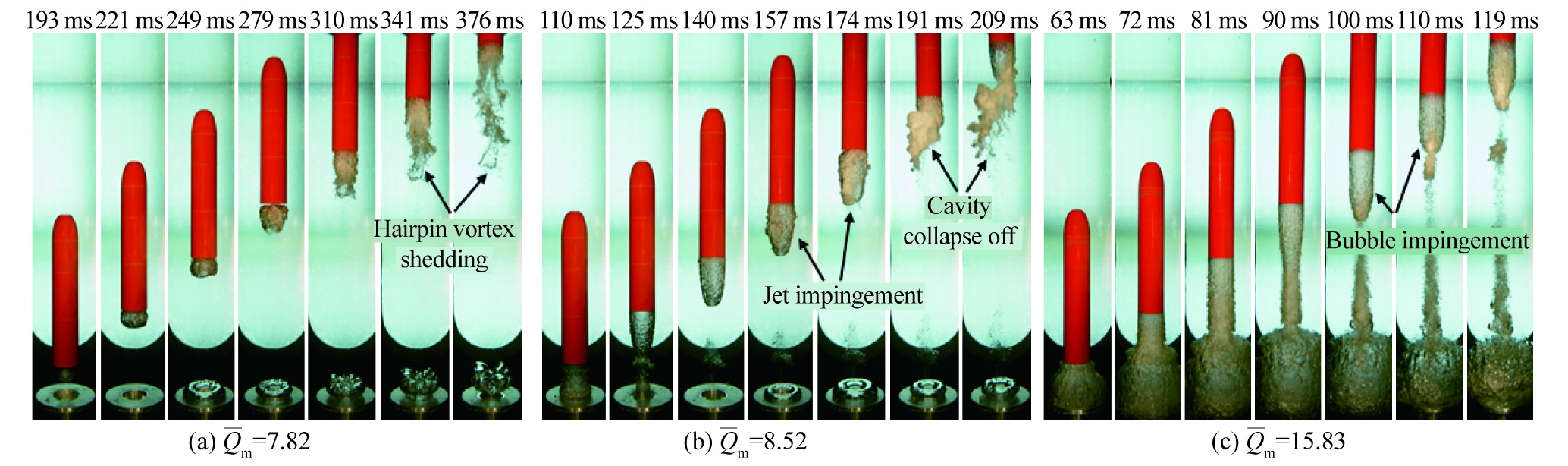
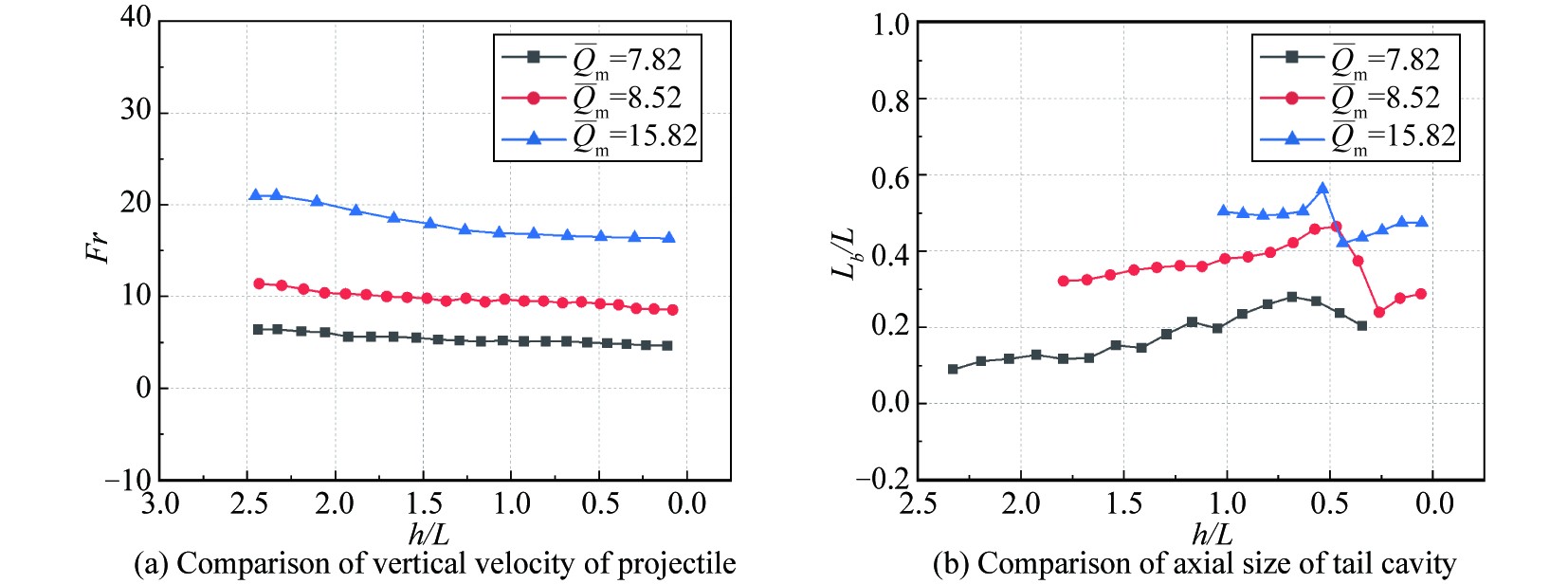
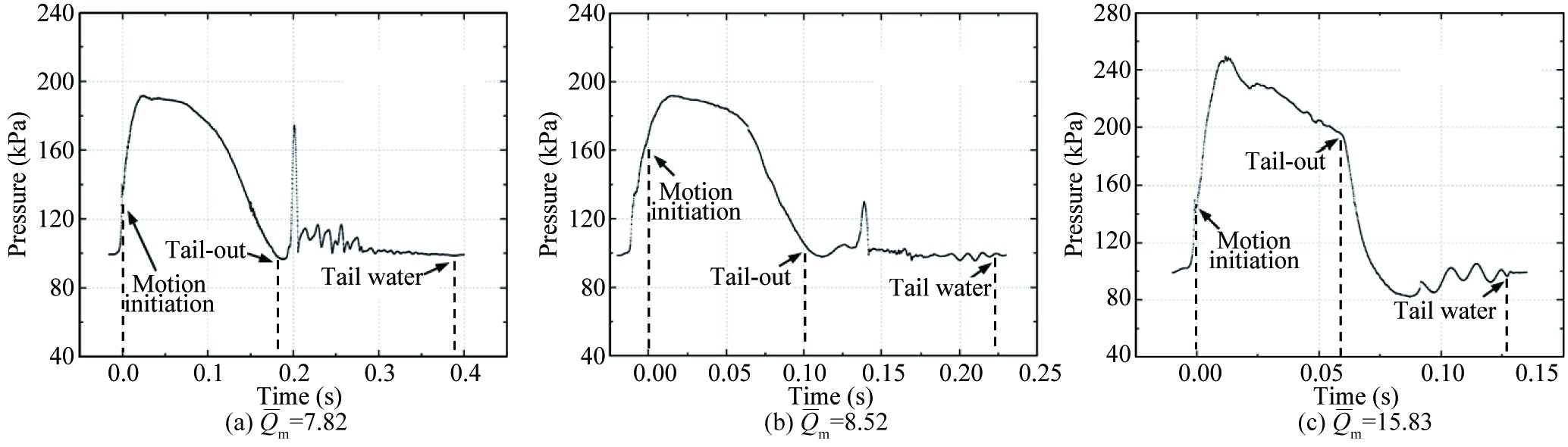
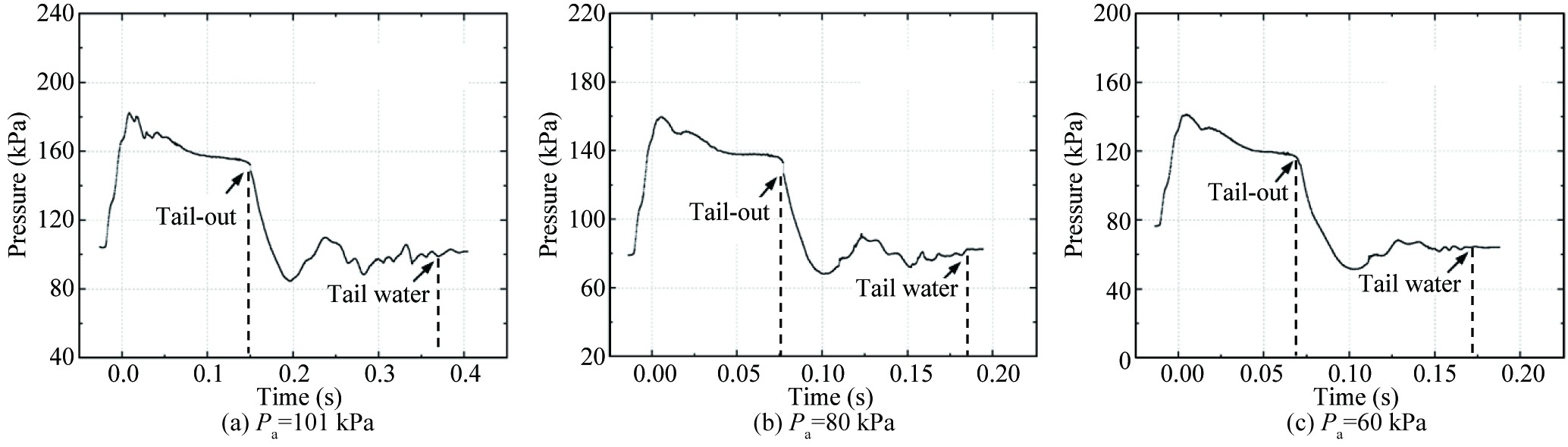
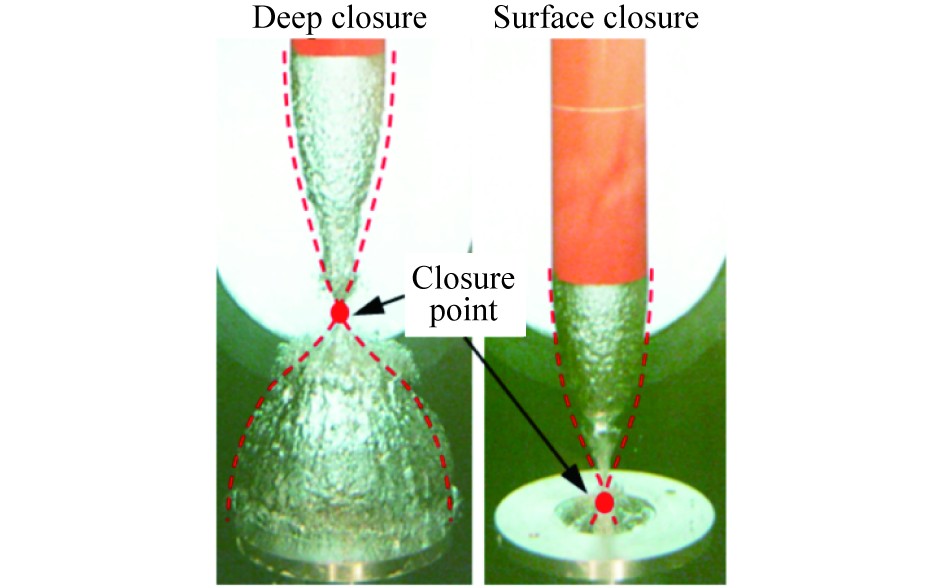
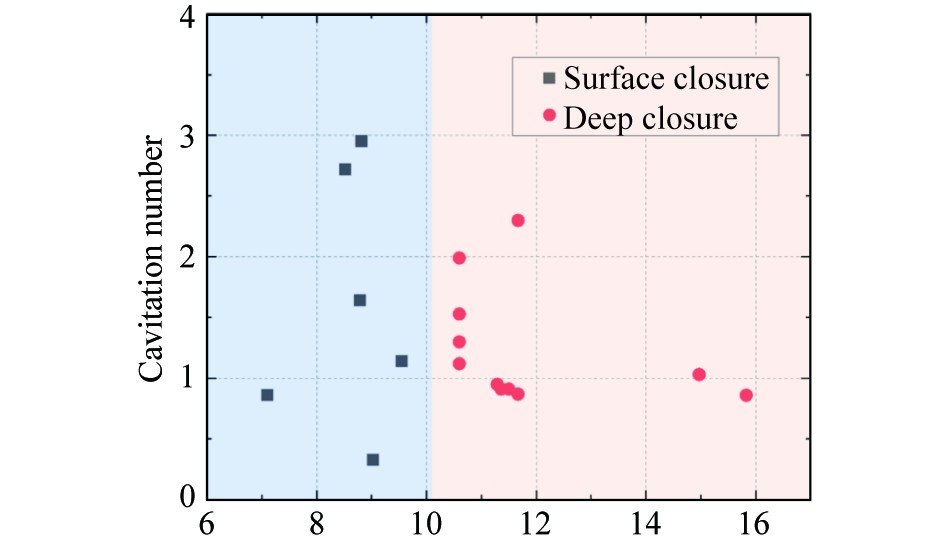
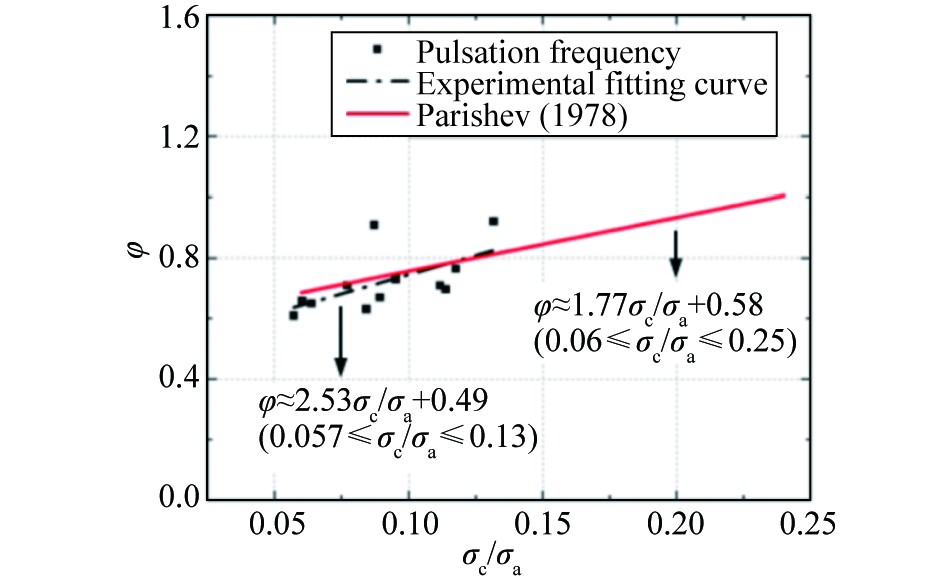
In water-exit projectiles utilizing high-pressure gas ejection, the tail section typically develops a cavity formed by high-pressure gas from the launch tube. The pressure oscillations within this tail cavity significantly influence the projectile’s hydrodynamic load. This paper experimentally investigates the internal pressure oscillation characteristics of the ejection projectile’s tail cavity under varying ventilation conditions and ambient pressures. The research reveals that tail cavity pressure demonstrates periodic pulsation patterns during vertical motion. The primary cause of pressure impact at the projectile’s bottom is attributed to the re-entrant jet formed during cavity closure. Enhanced ventilation and reduced ambient pressure contribute to increased tail cavity volume, which promotes stable projectile motion in water. Additionally, this study establishes the relationship between the tail cavity’s periodic pulsation characteristics and the cavitation number.
In water-exit projectiles utilizing high-pressure gas ejection, the tail section typically develops a cavity formed by high-pressure gas from the launch tube. The pressure oscillations within this tail cavity significantly influence the projectile’s hydrodynamic load. This paper experimentally investigates the internal pressure oscillation characteristics of the ejection projectile’s tail cavity under varying ventilation conditions and ambient pressures. The research reveals that tail cavity pressure demonstrates periodic pulsation patterns during vertical motion. The primary cause of pressure impact at the projectile’s bottom is attributed to the re-entrant jet formed during cavity closure. Enhanced ventilation and reduced ambient pressure contribute to increased tail cavity volume, which promotes stable projectile motion in water. Additionally, this study establishes the relationship between the tail cavity’s periodic pulsation characteristics and the cavitation number.
2026, 40(3)
:547-562.
doi: 10.1007/s13344-026-0042-0
Abstract:
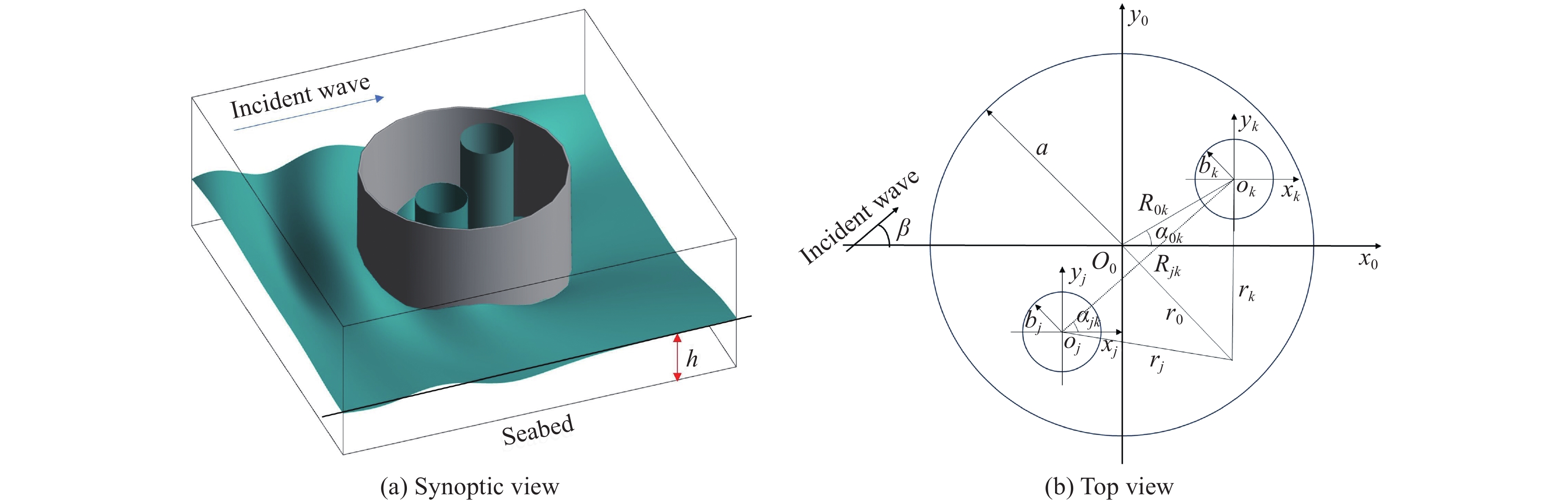
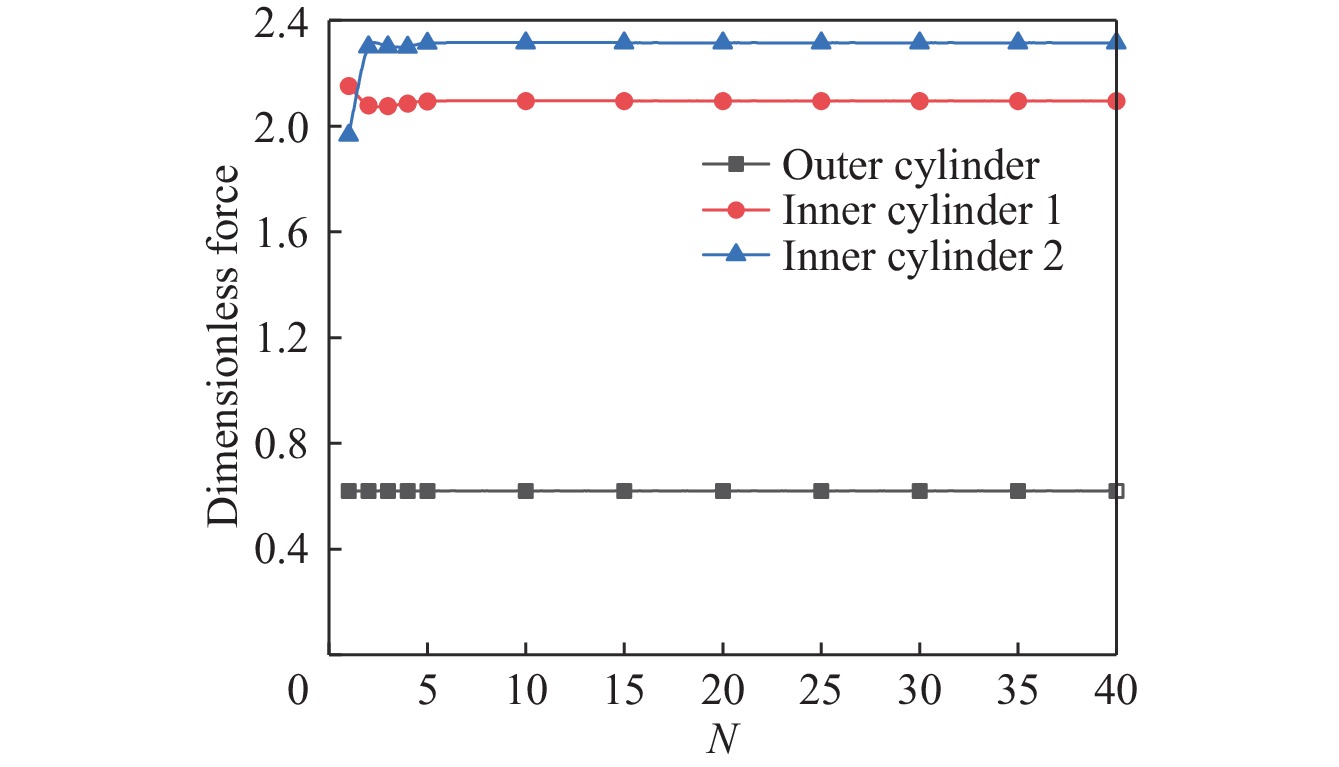
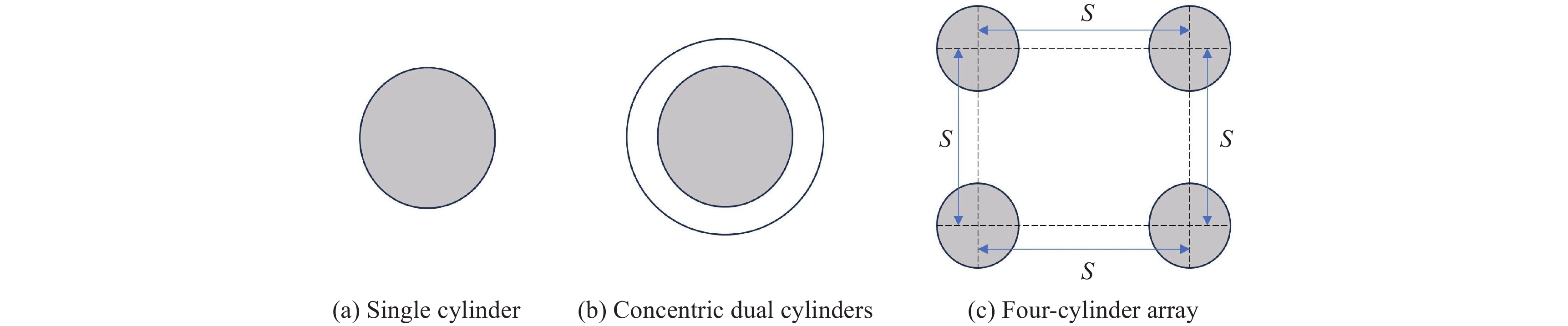
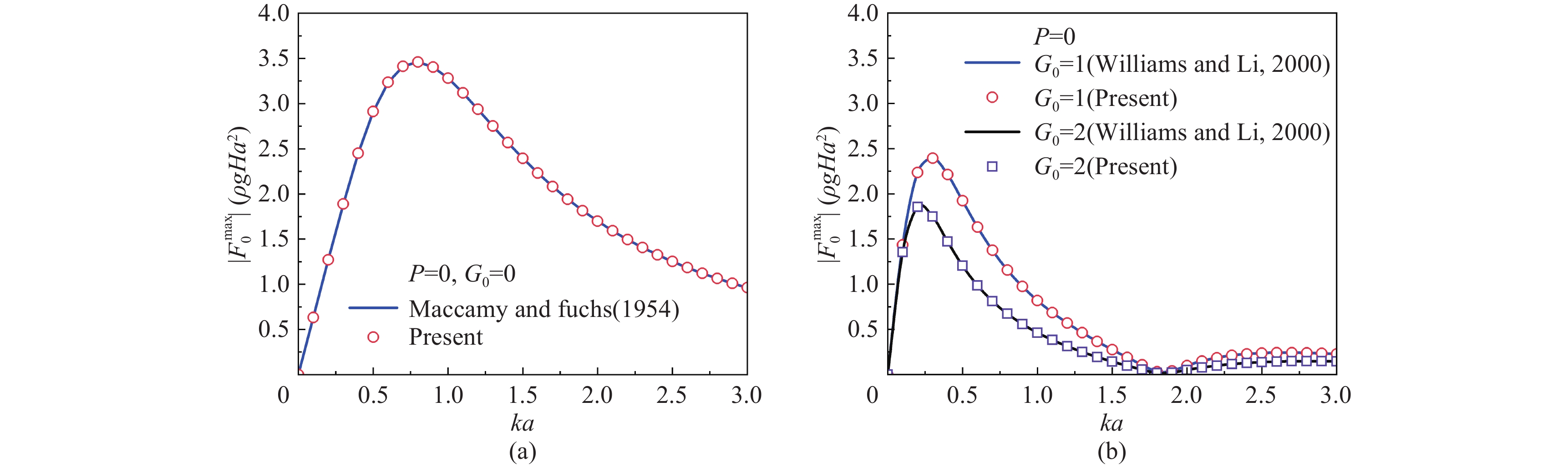
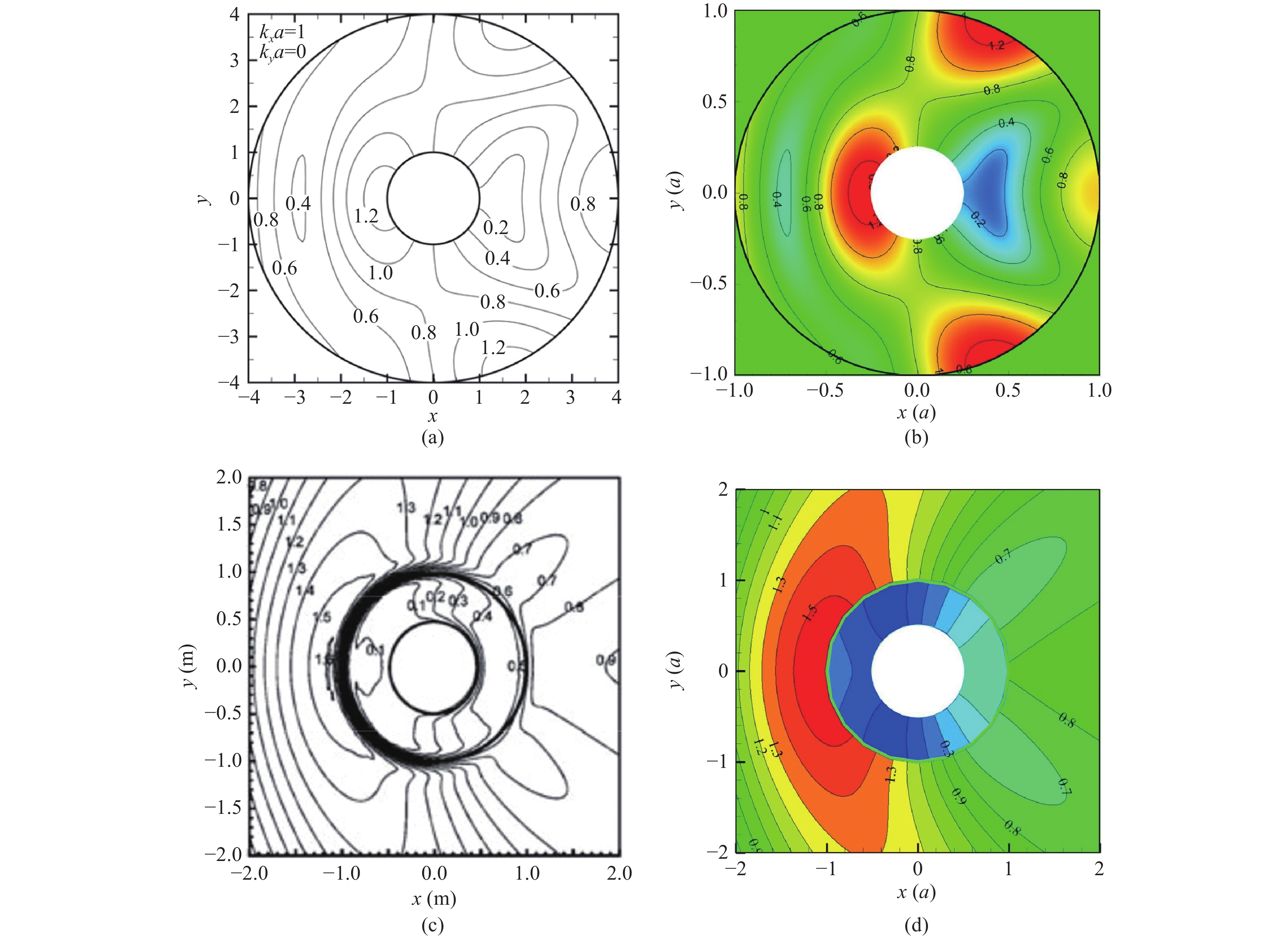
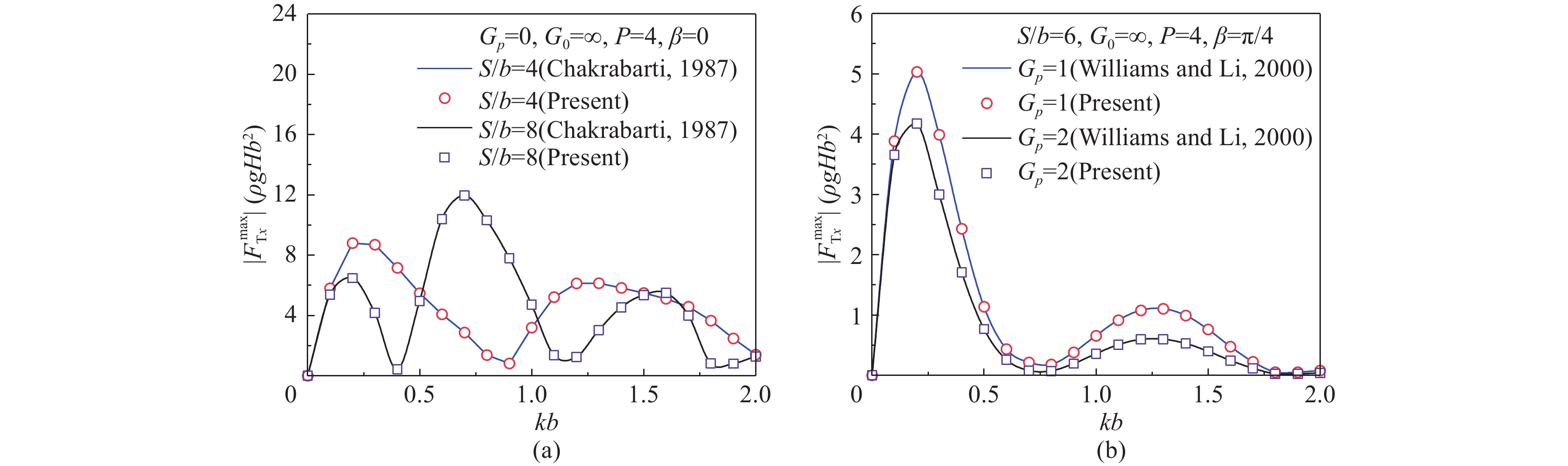
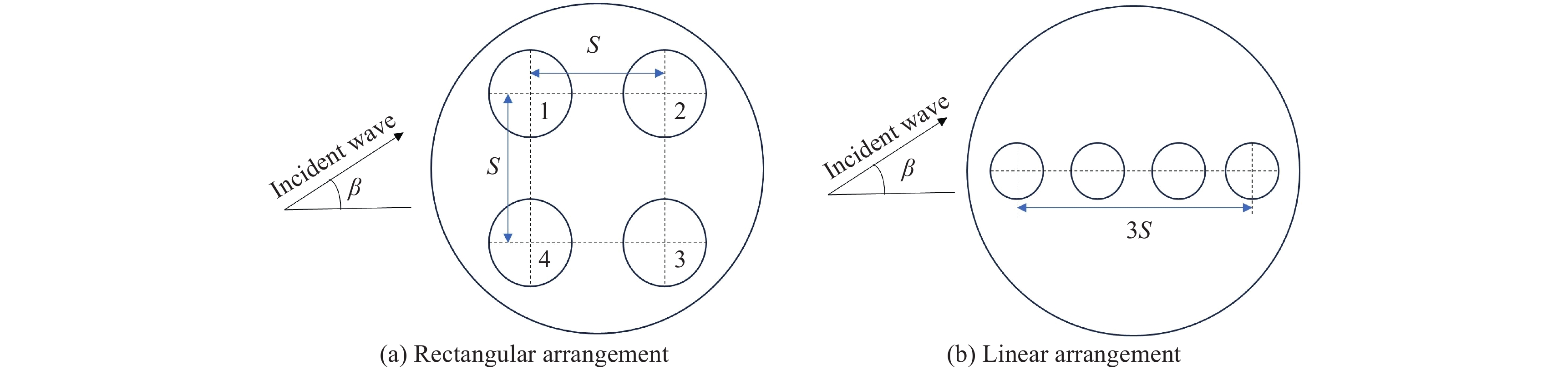
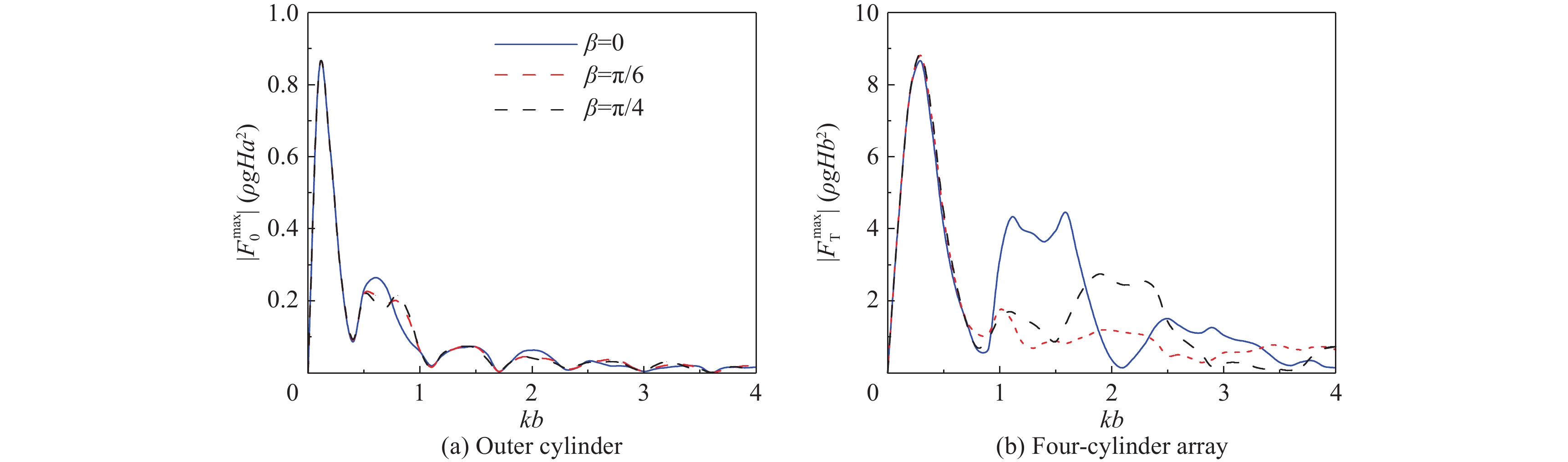
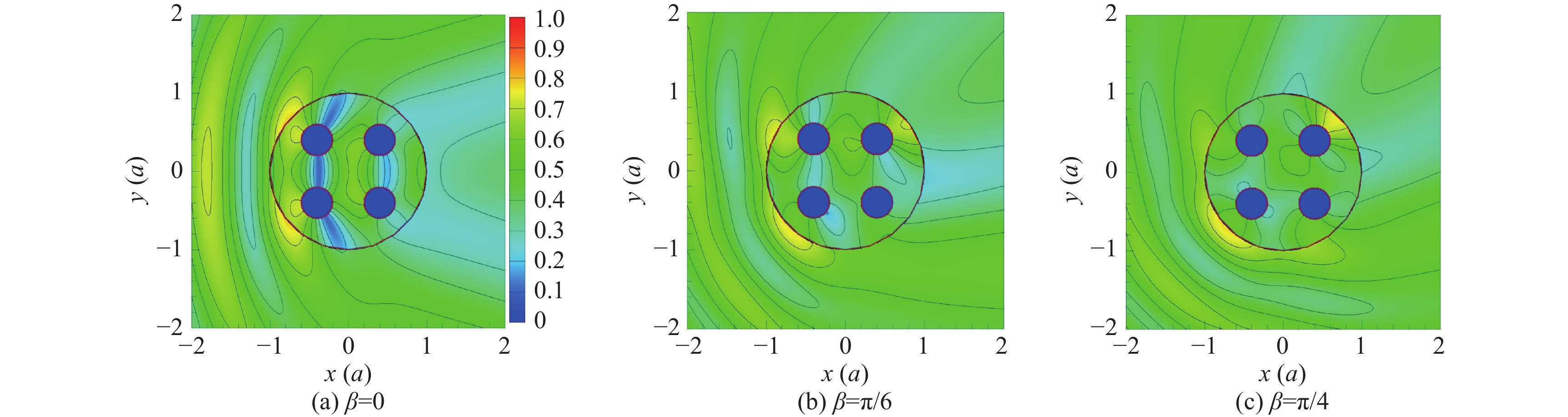
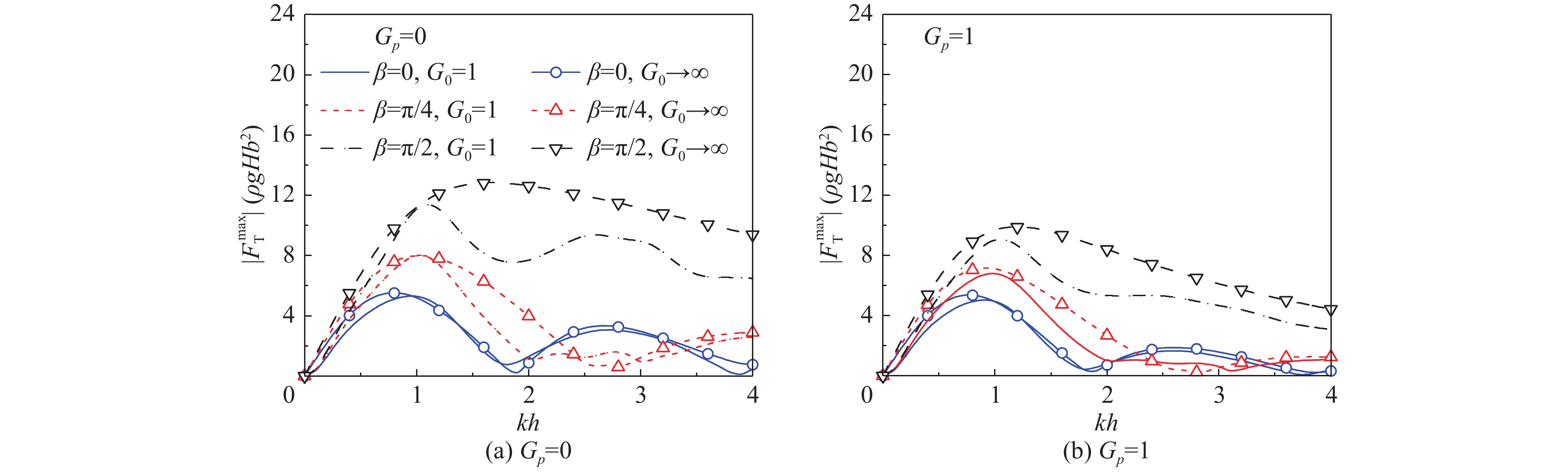
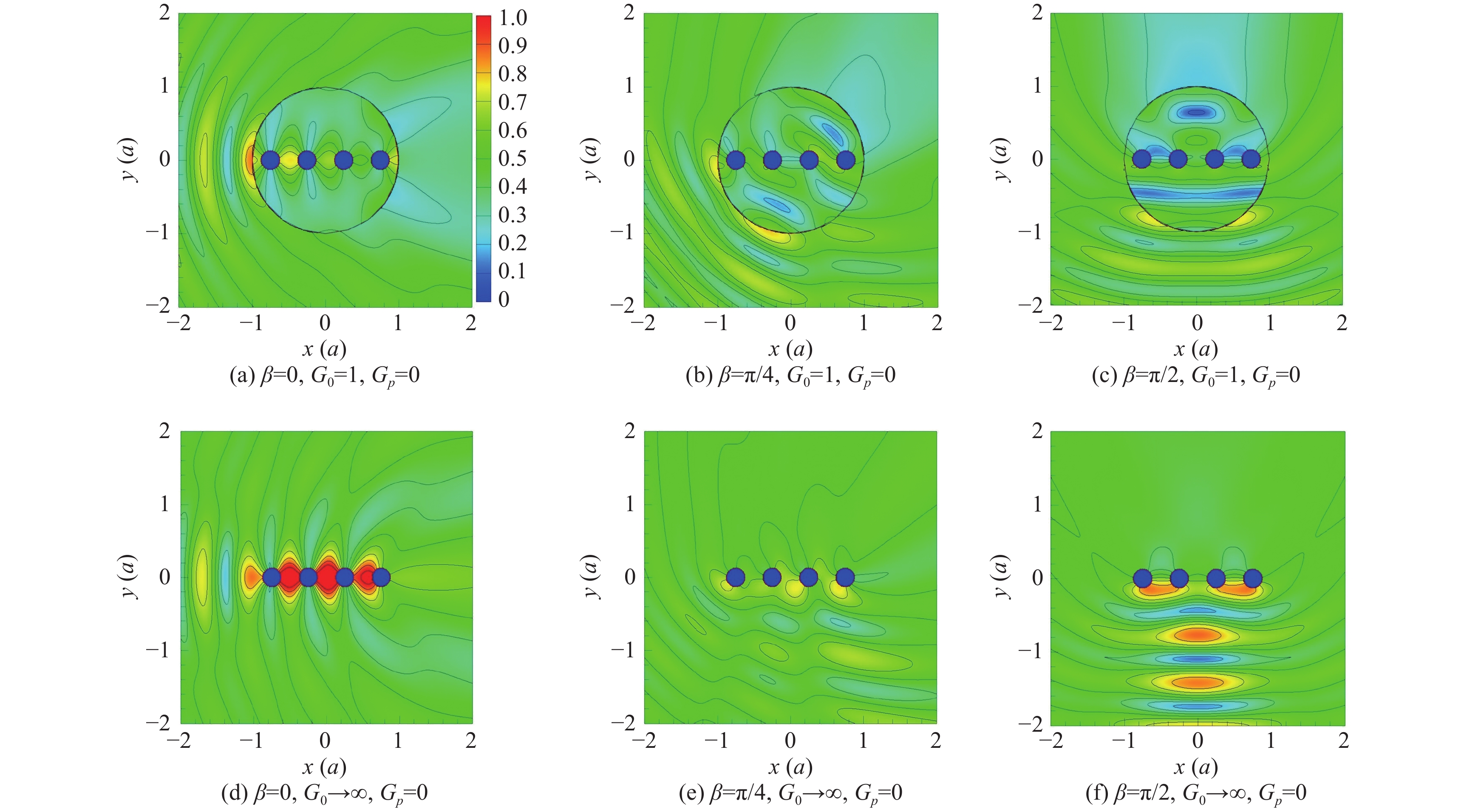
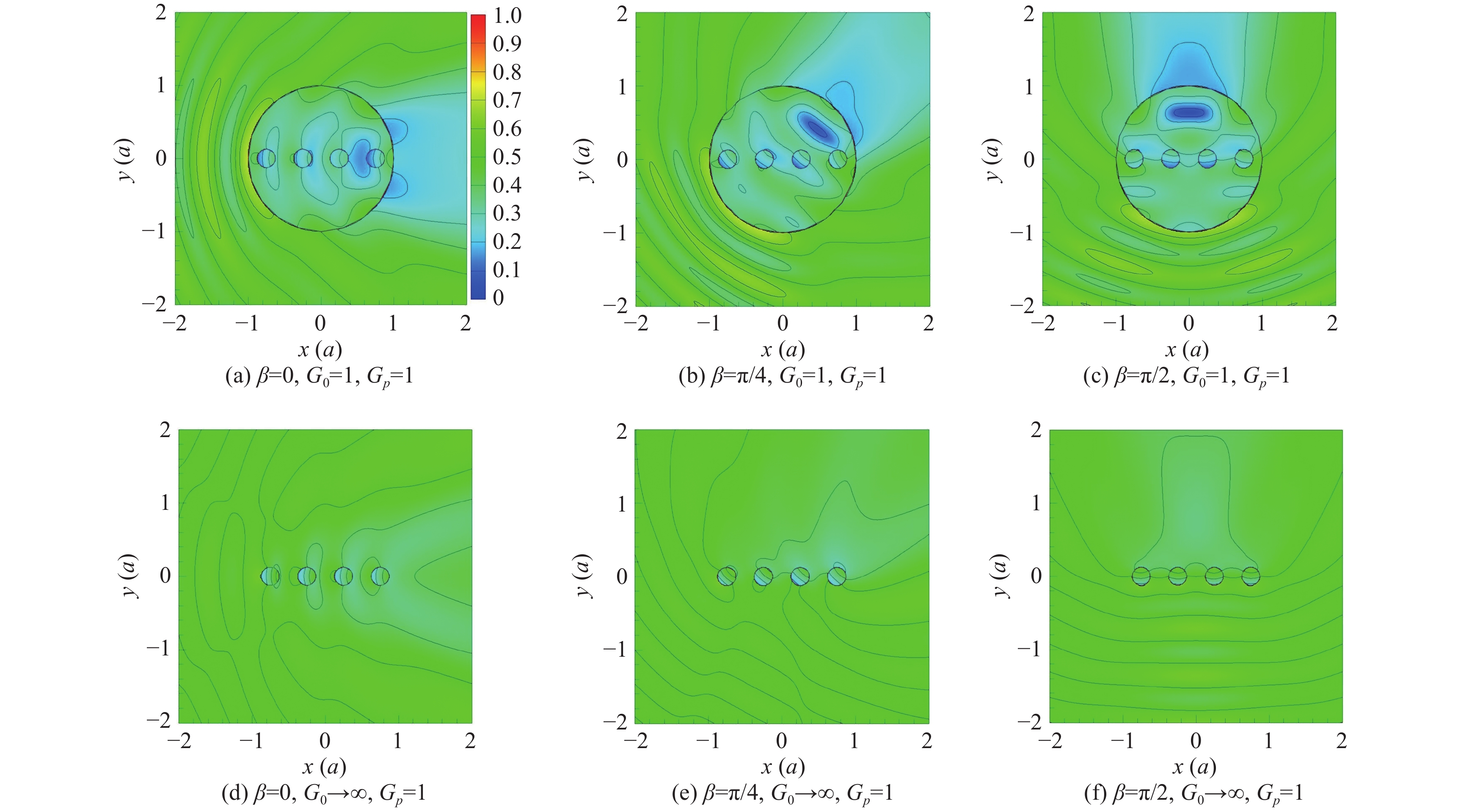
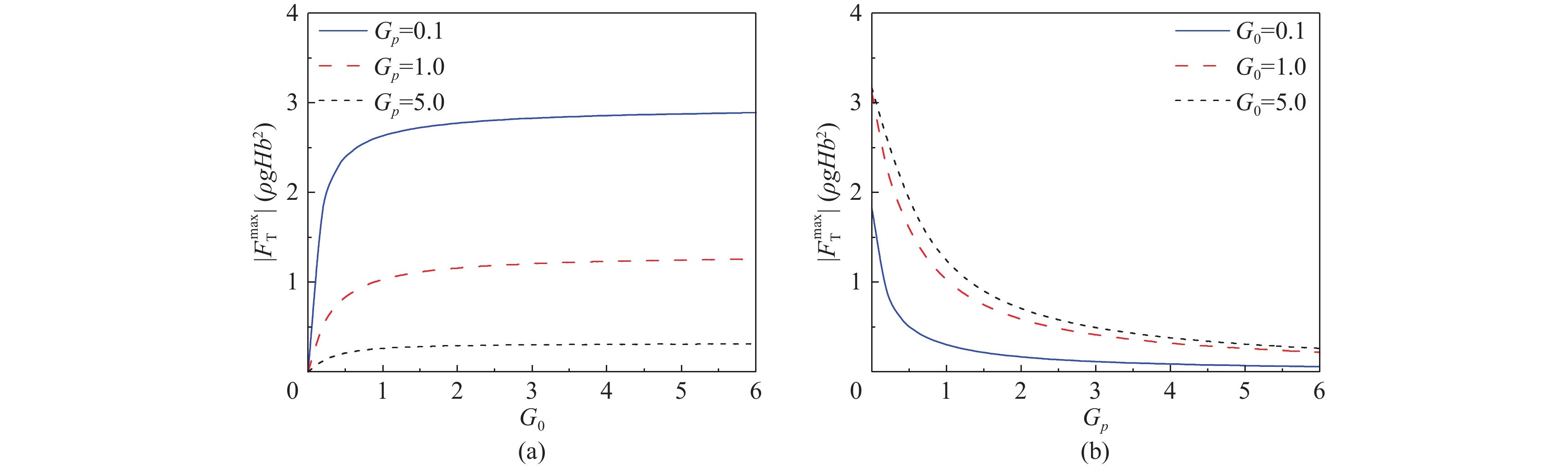
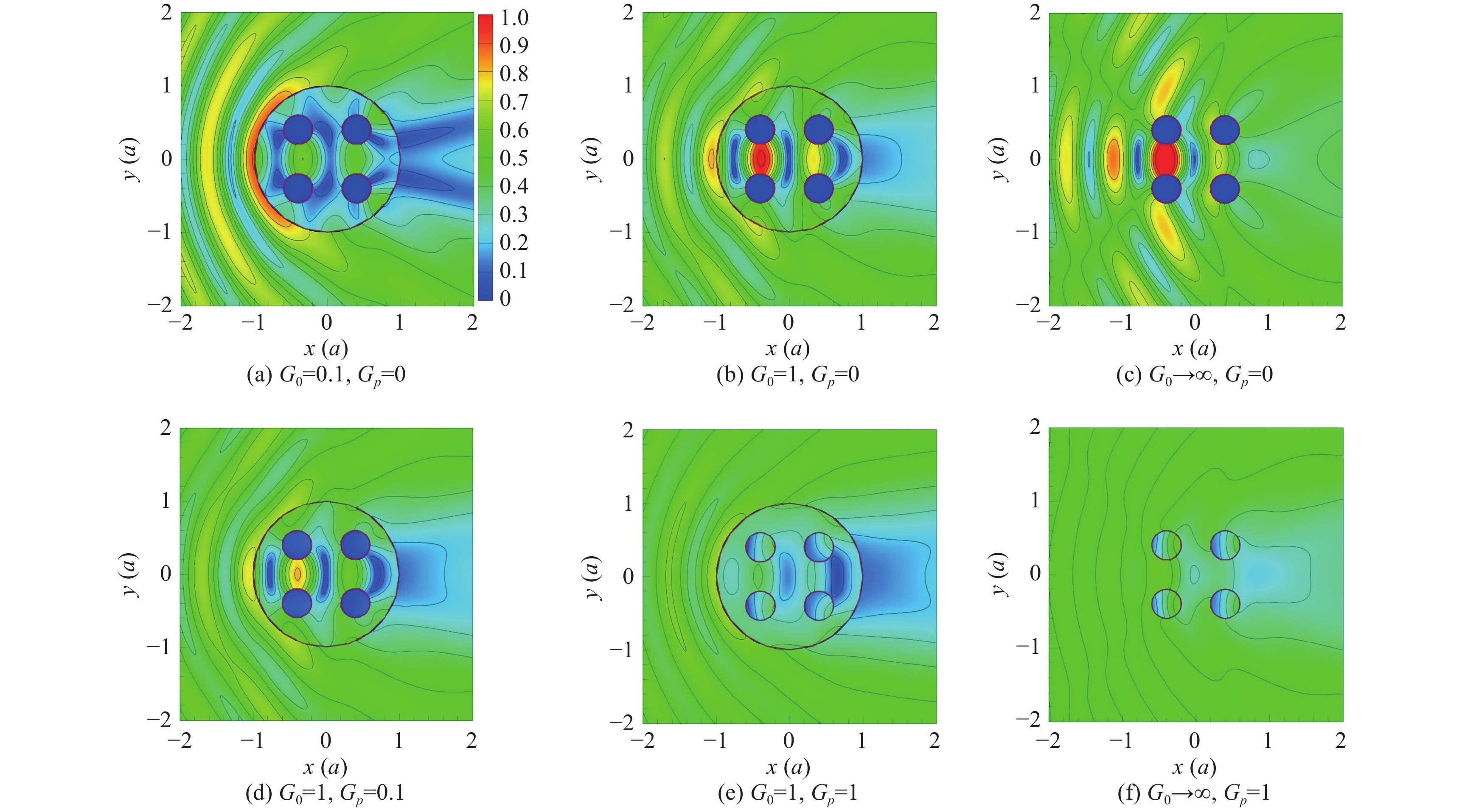
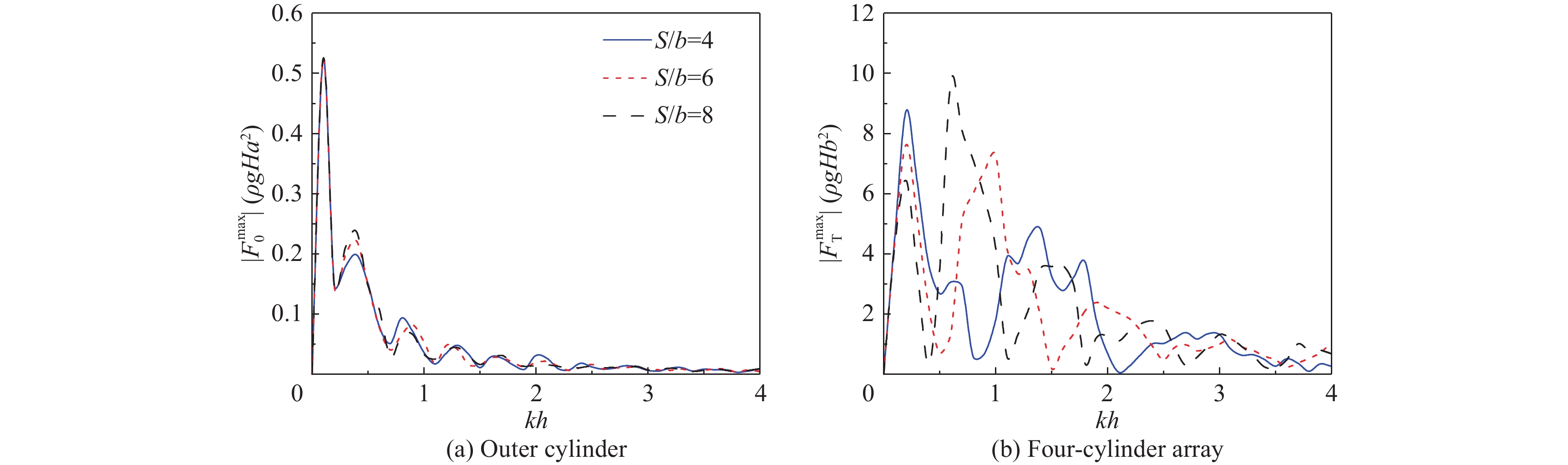
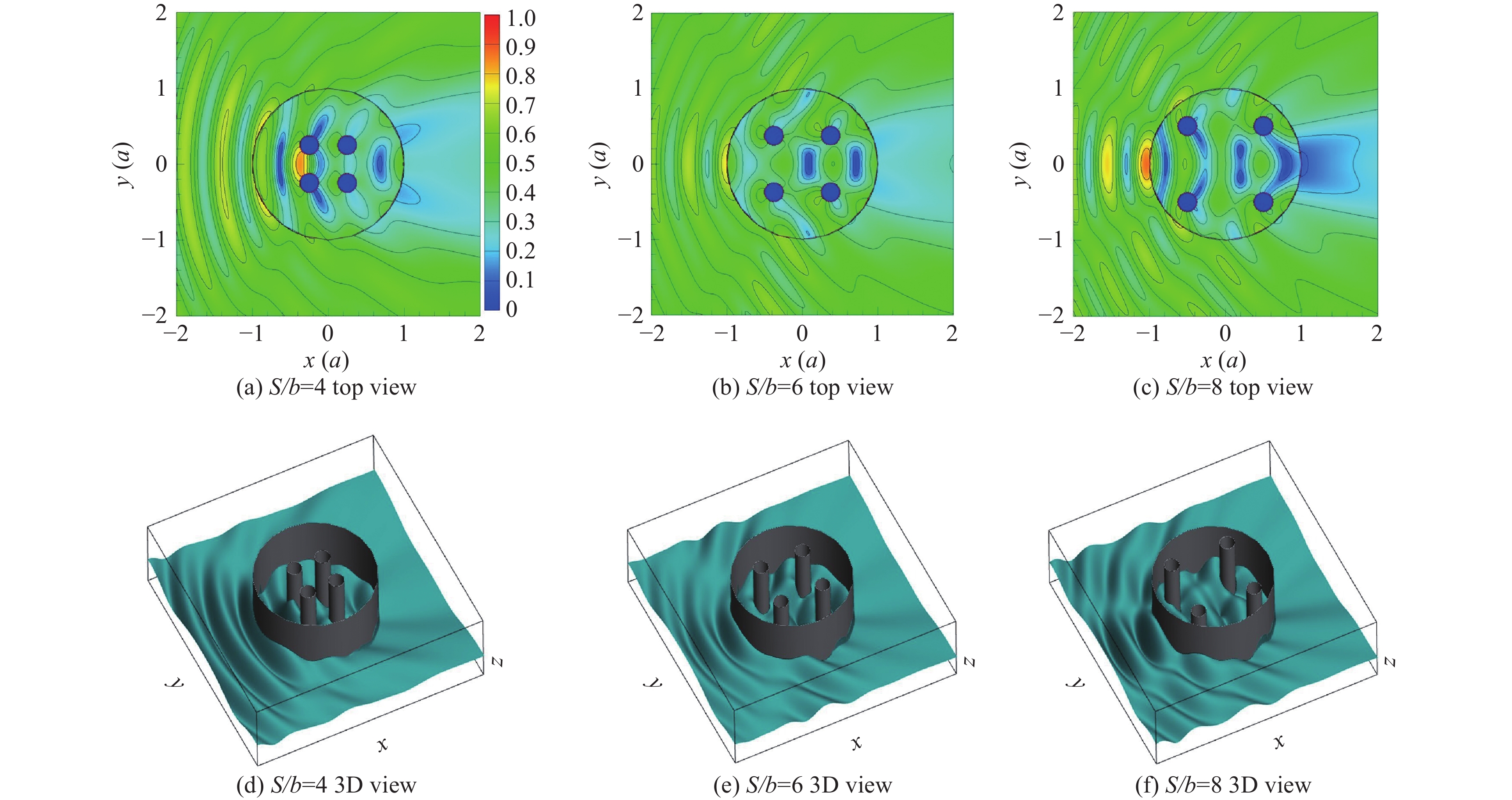
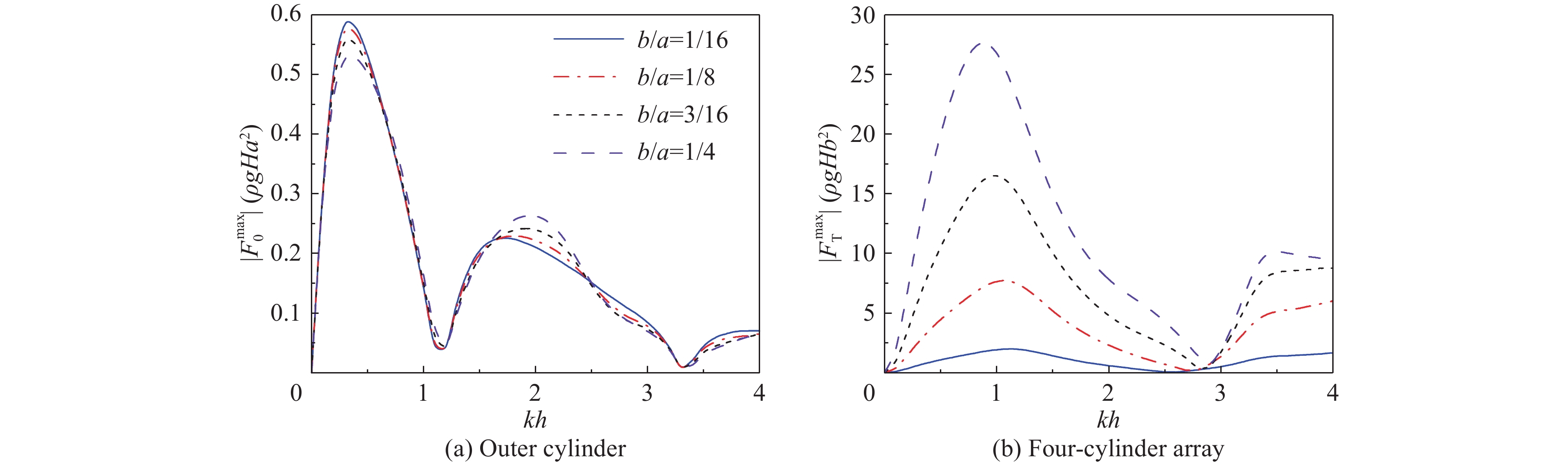
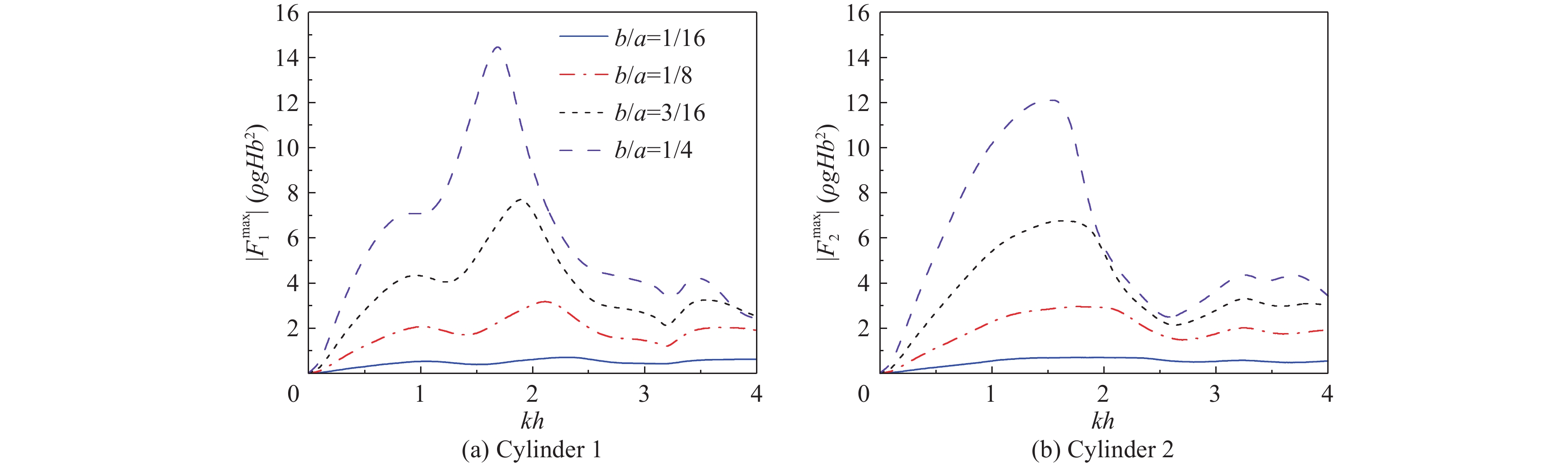
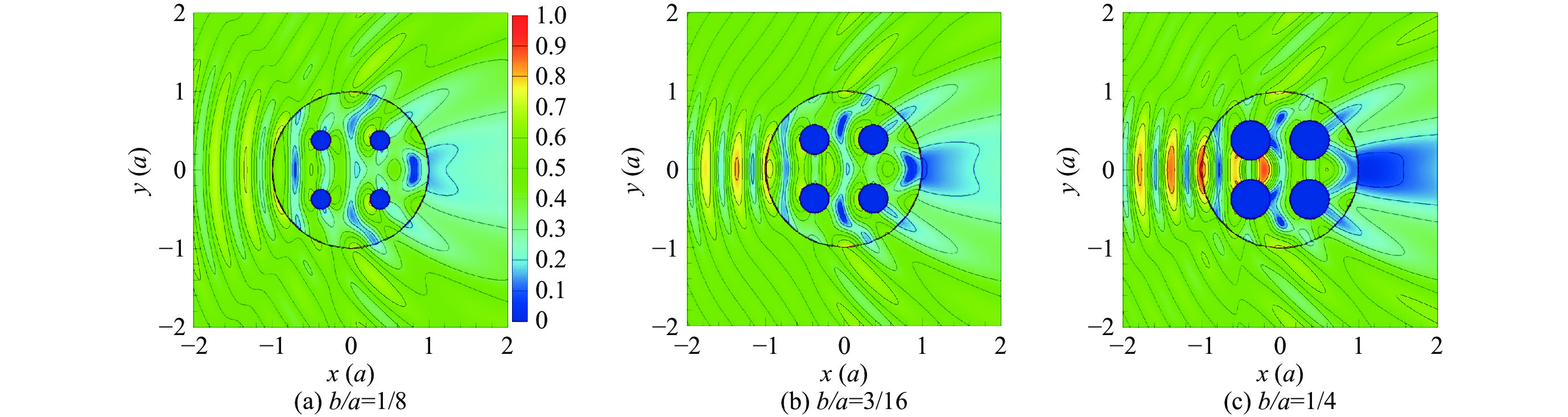
This study investigates the hydrodynamic characteristics of an eccentric multi-cylinder system composed of a porous outer cylinder and multiple inner cylinders, based on linear potential flow theory. A semi-analytical model is developed using the eigenfunction expansion method, and its accuracy is validated against existing theoretical and numerical results. The findings reveal that the wave loads on the inner cylinders are highly sensitive to the porosity, spacing, and radius ratio. The underlying mechanisms involve energy dissipation, interference modulation, and geometric shielding, which collectively govern wave focusing, load variation, and energy attenuation within the system. Moreover, the arrangement and permeability of the inner cylinders play a crucial role in mitigating wave concentration and suppressing water accumulation in the gaps, thereby offering valuable implications for structural optimization. This work provides new insights into the hydrodynamic mechanisms of eccentric multi-cylinder systems and offers theoretical guidance for coastal protection, wave energy utilization, and offshore foundation design.
This study investigates the hydrodynamic characteristics of an eccentric multi-cylinder system composed of a porous outer cylinder and multiple inner cylinders, based on linear potential flow theory. A semi-analytical model is developed using the eigenfunction expansion method, and its accuracy is validated against existing theoretical and numerical results. The findings reveal that the wave loads on the inner cylinders are highly sensitive to the porosity, spacing, and radius ratio. The underlying mechanisms involve energy dissipation, interference modulation, and geometric shielding, which collectively govern wave focusing, load variation, and energy attenuation within the system. Moreover, the arrangement and permeability of the inner cylinders play a crucial role in mitigating wave concentration and suppressing water accumulation in the gaps, thereby offering valuable implications for structural optimization. This work provides new insights into the hydrodynamic mechanisms of eccentric multi-cylinder systems and offers theoretical guidance for coastal protection, wave energy utilization, and offshore foundation design.
2026, 40(3)
:563-575.
doi: 10.1007/s13344-026-0043-z
Abstract:
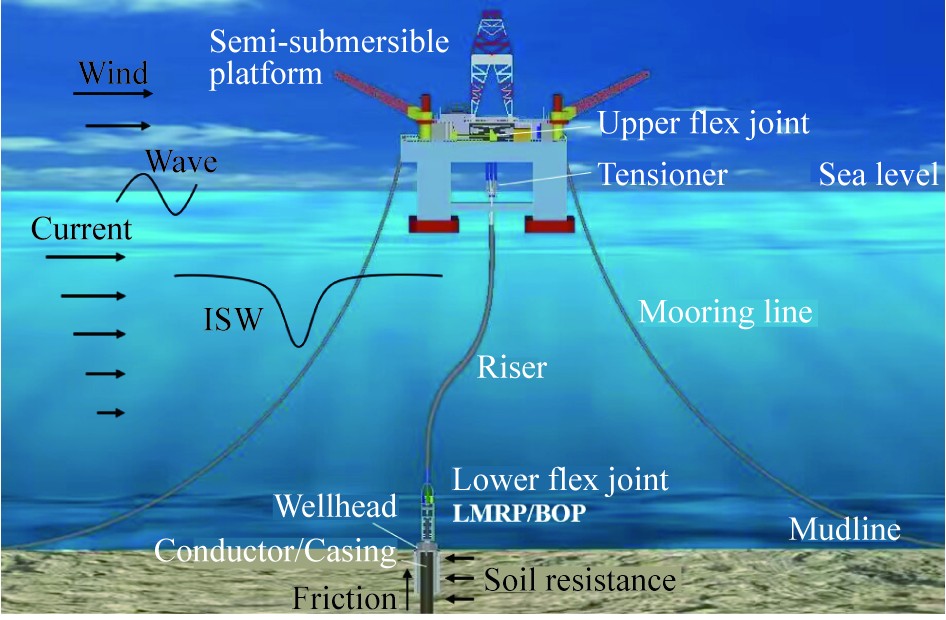
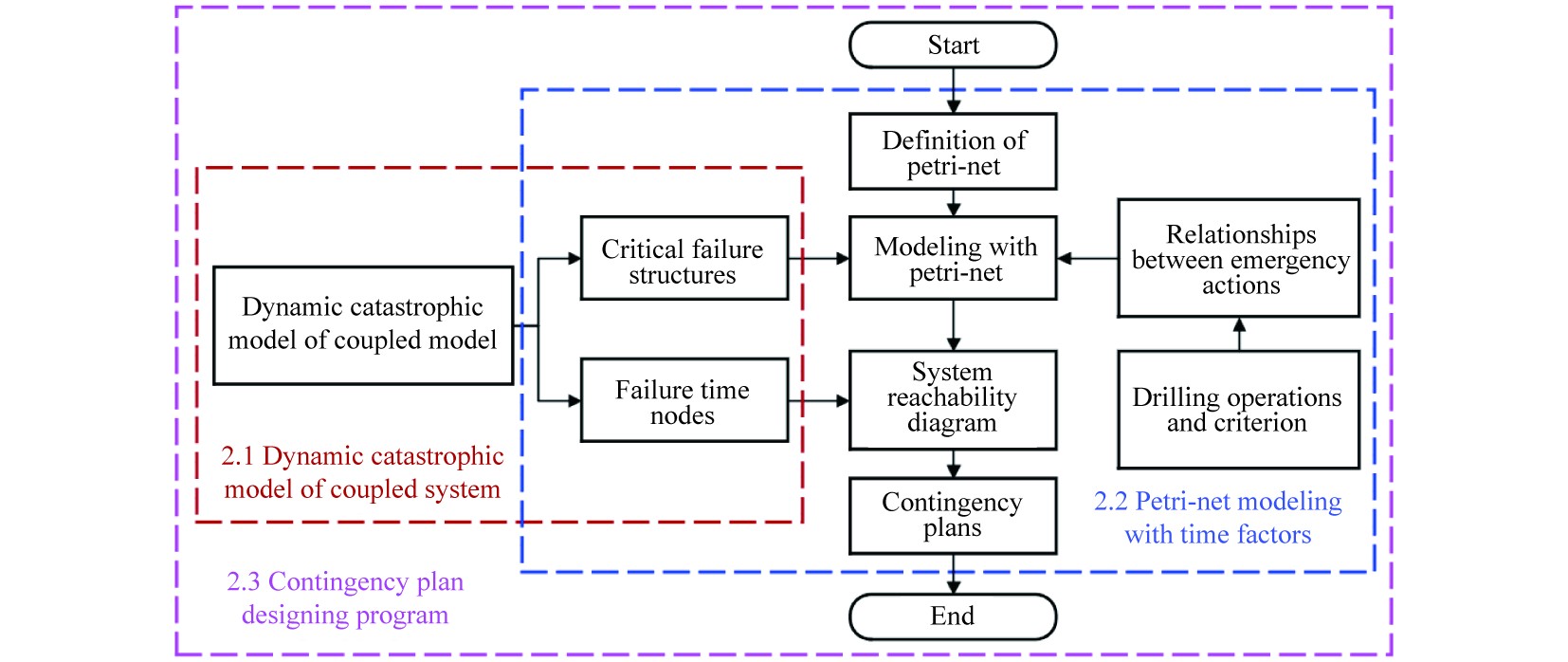
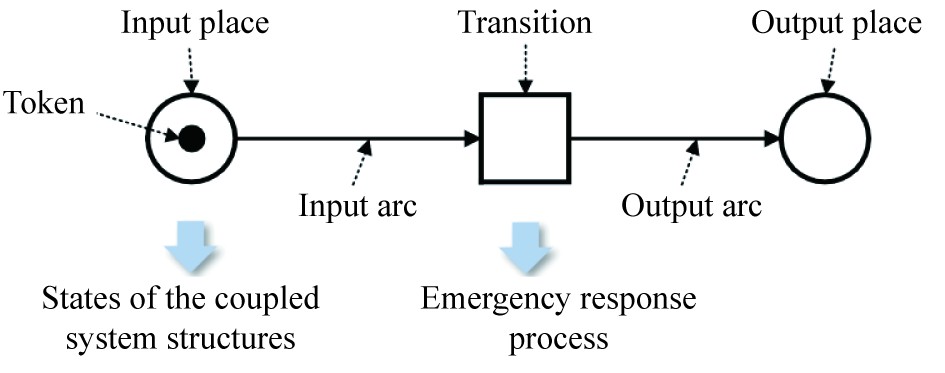
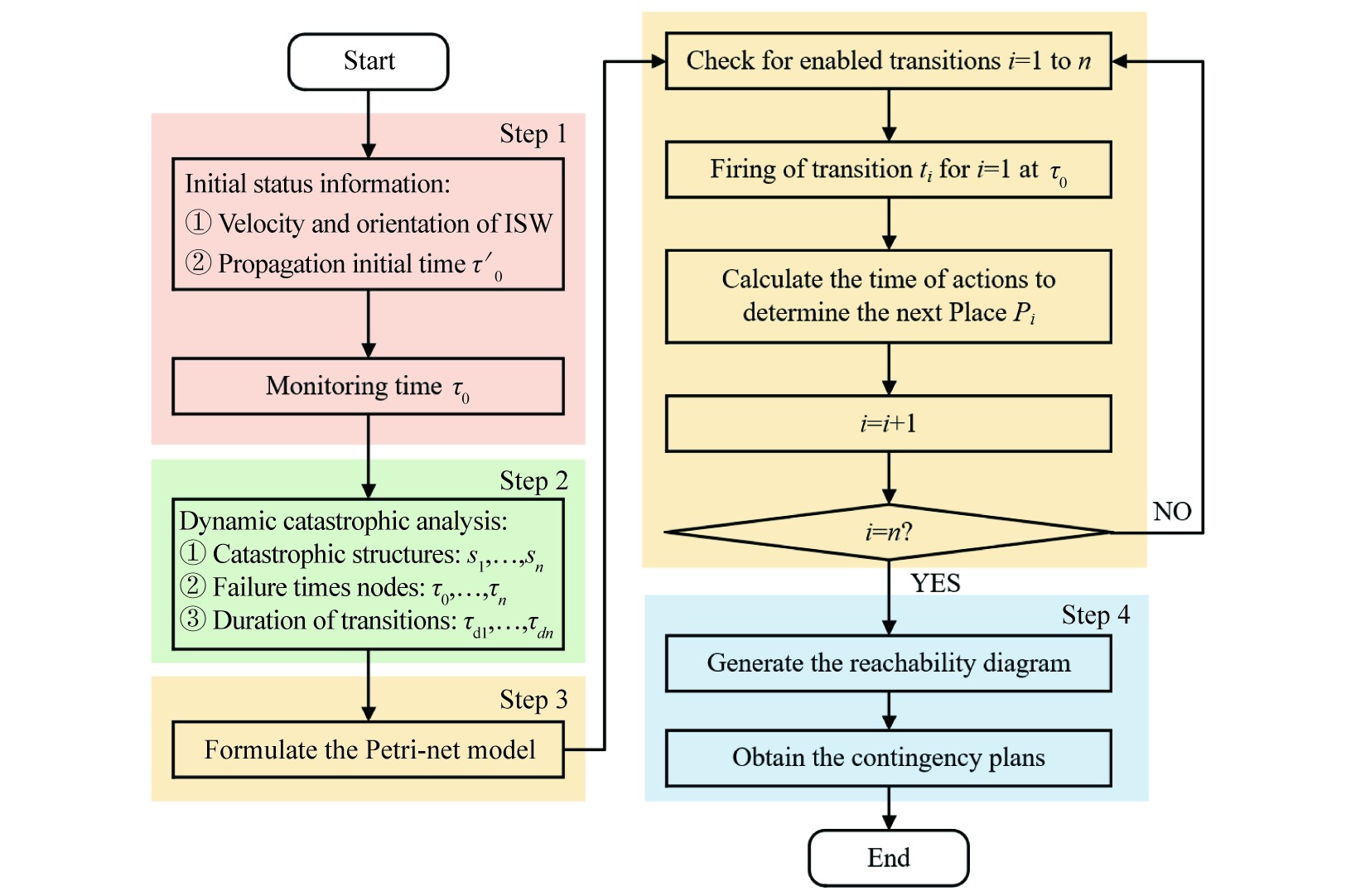
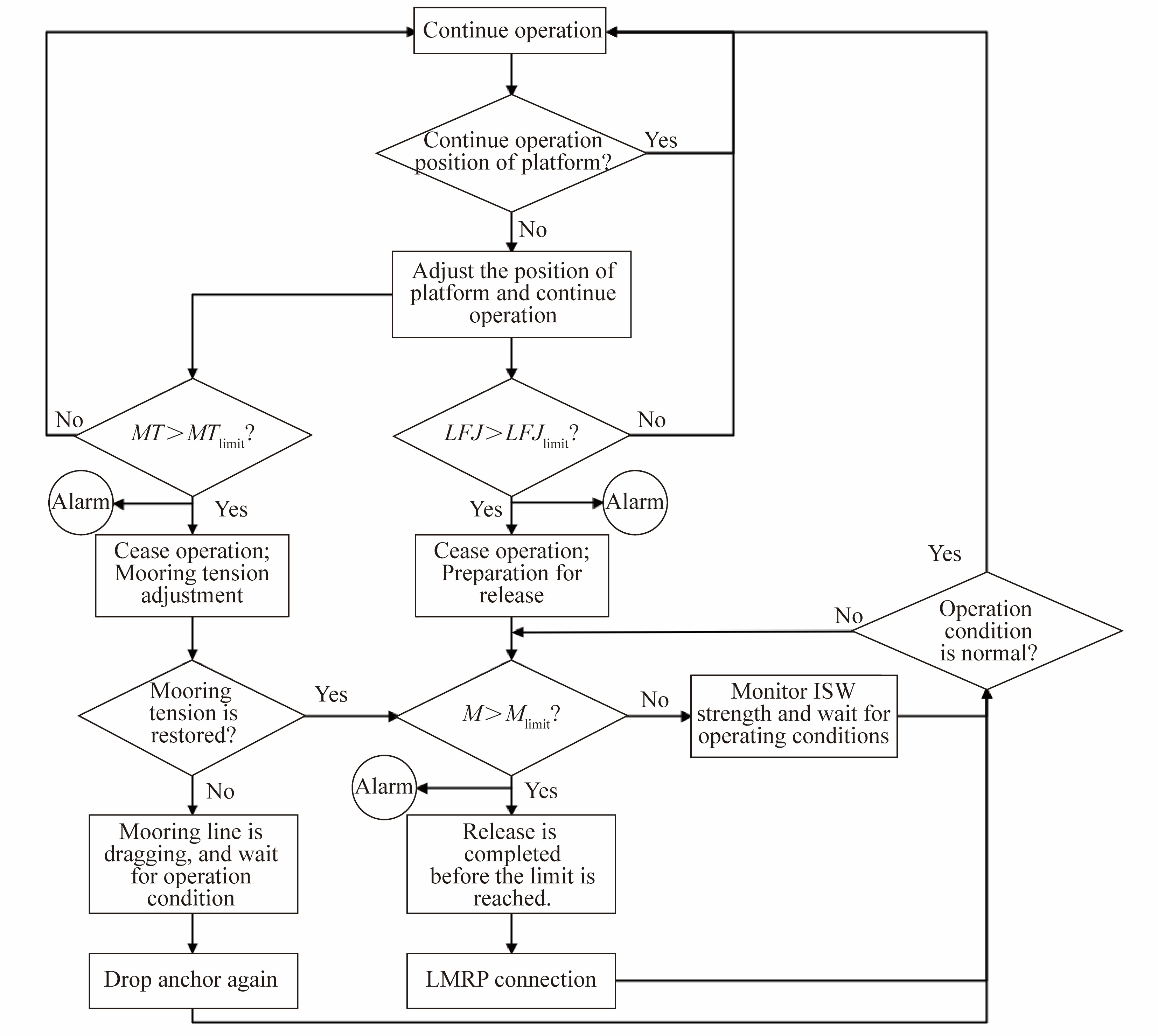
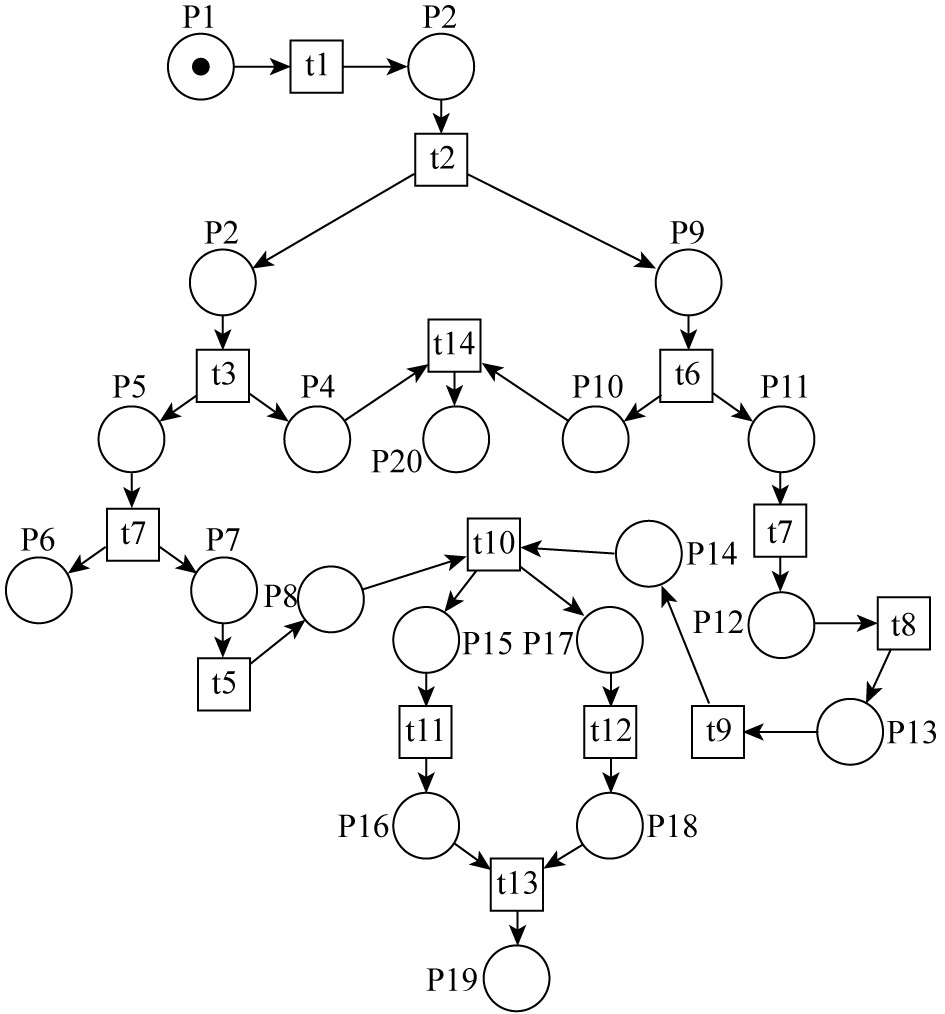
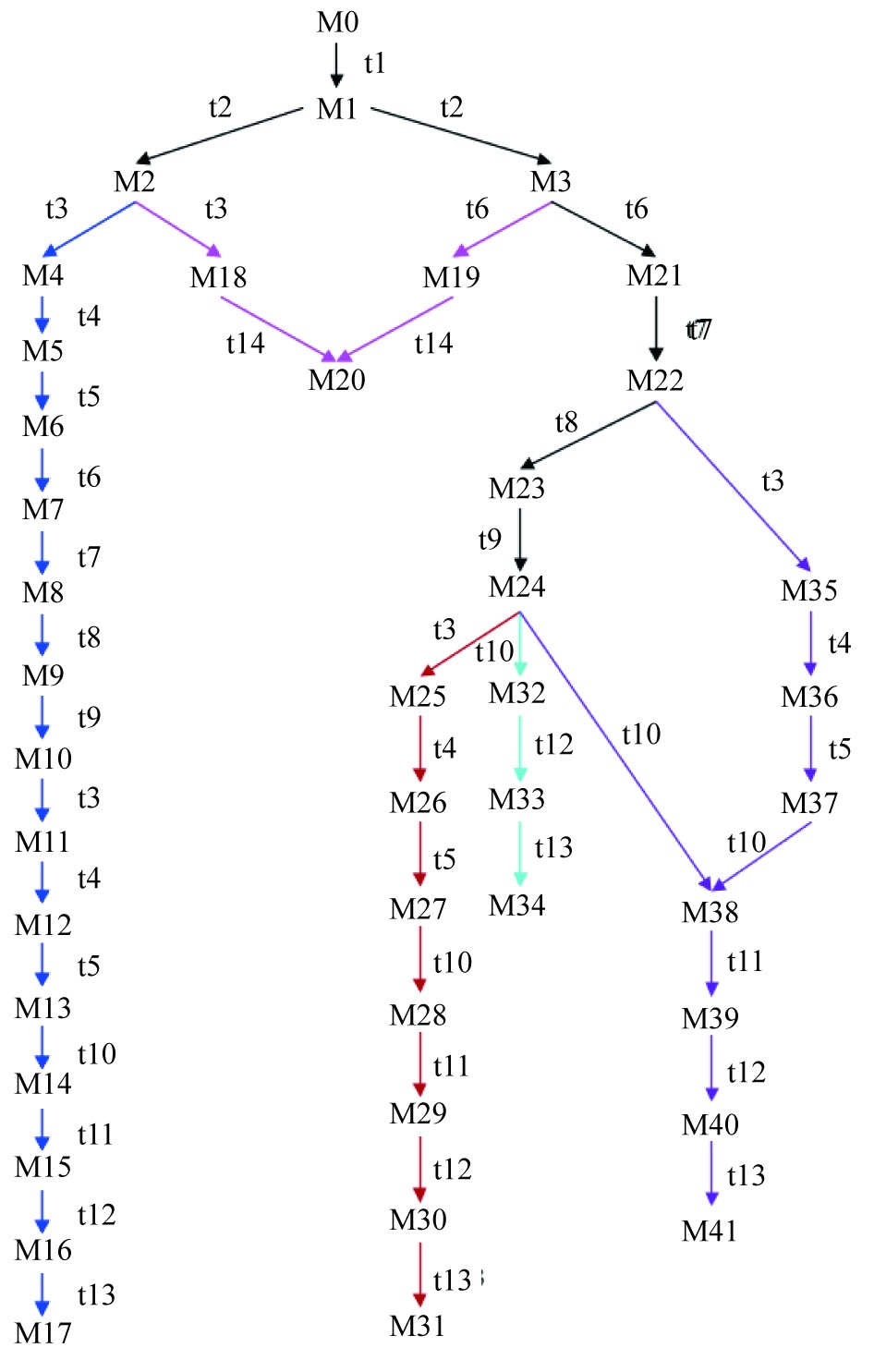
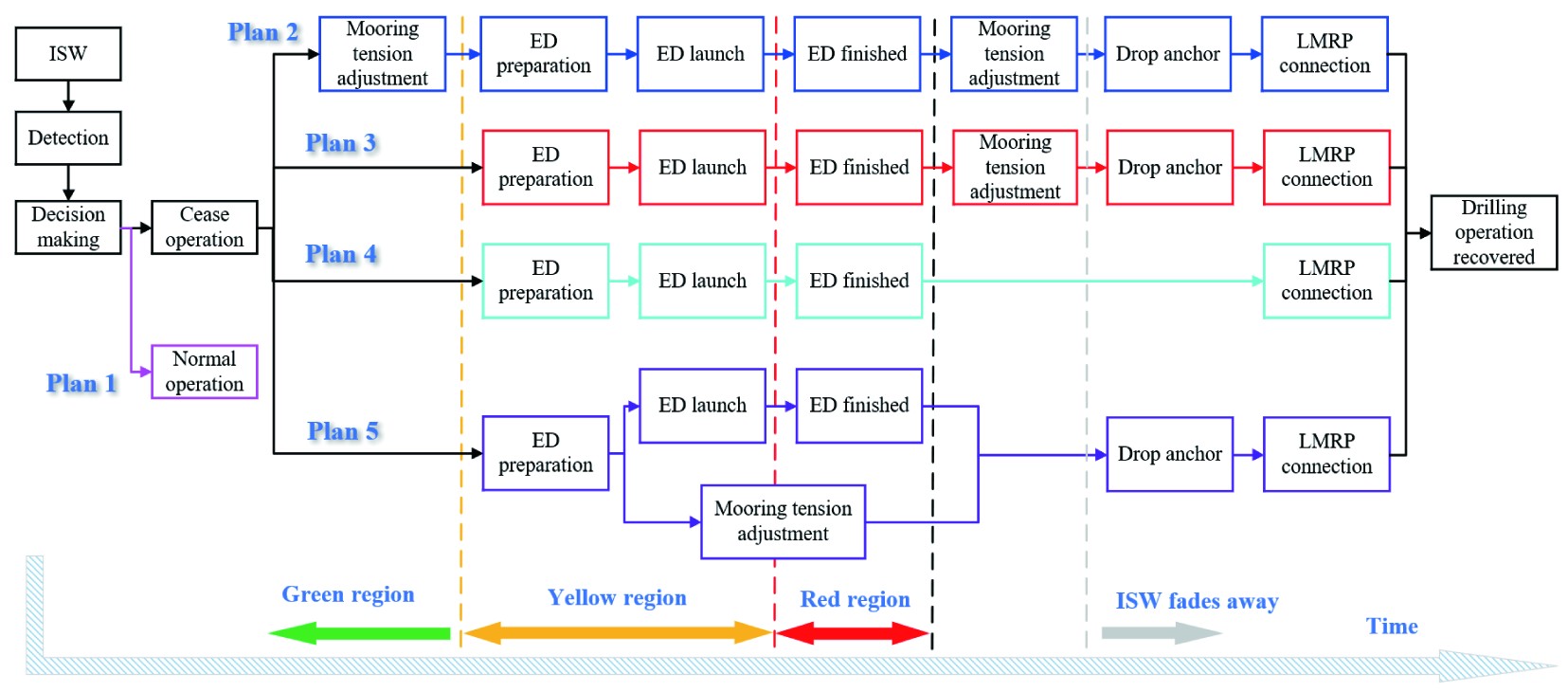
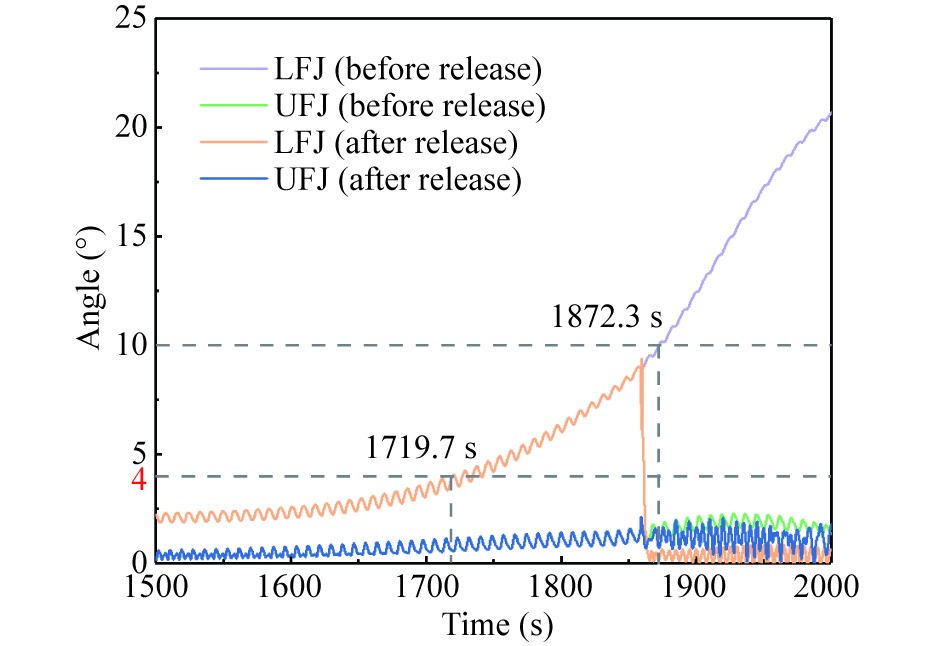
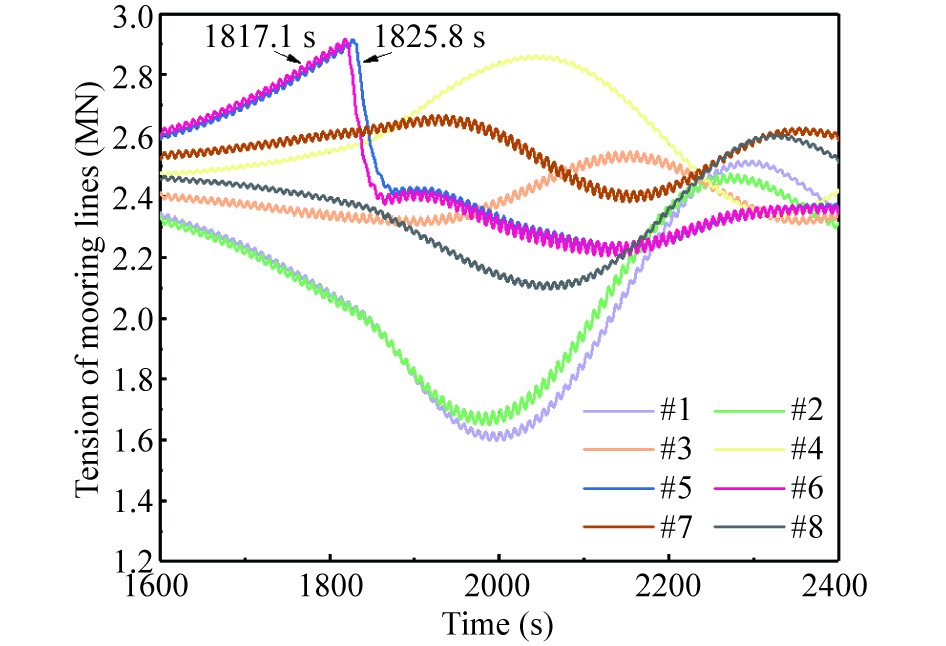
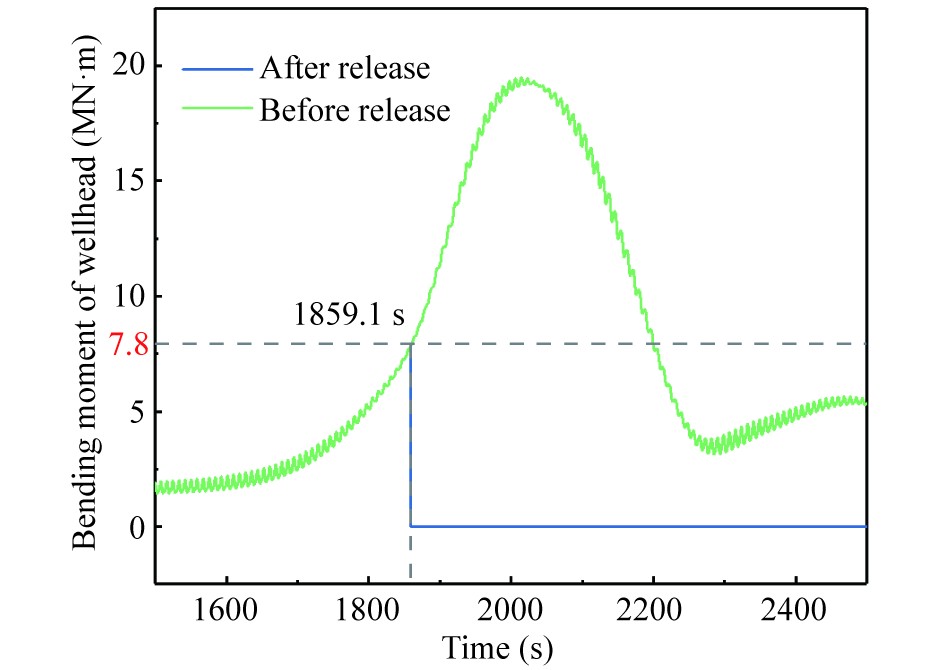
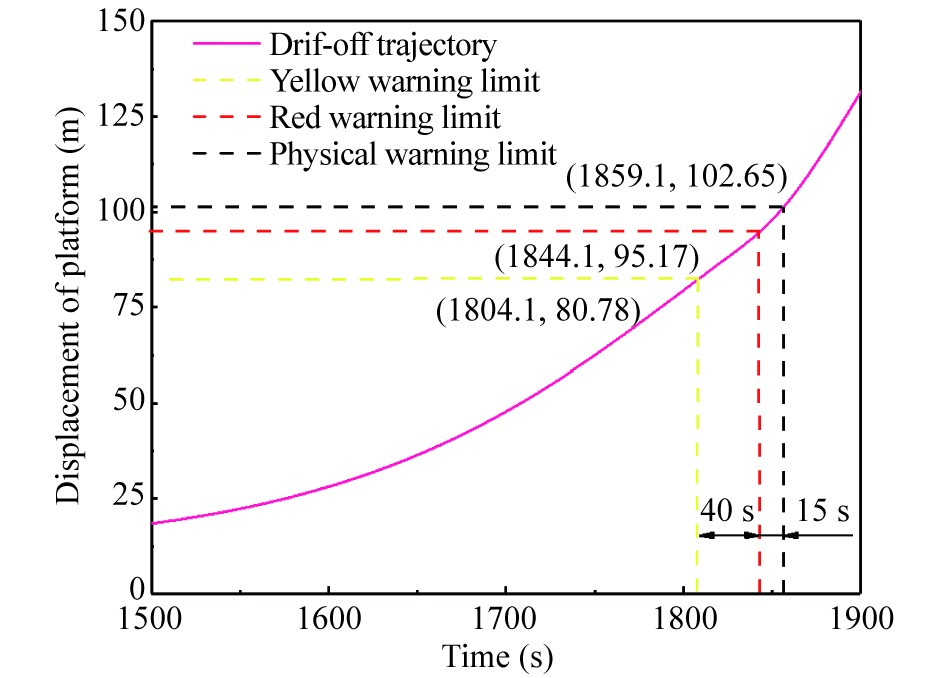
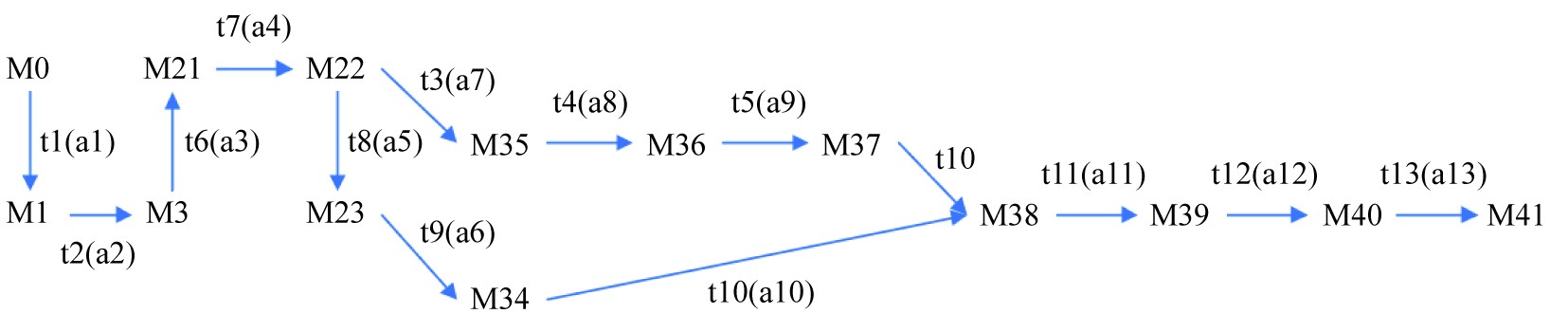
Internal solitary waves (ISWs), characterized by their nonlinearity, large amplitude, and destructive potential, pose significant risks during propagation, potentially causing riser fracture and anchor dragging. This paper presents an alternative to the conventional conservative emergency approach of immediate riser disconnection upon ISW detection. The proposed methodology integrates quantitative dynamic model calculations with Petri-net modeling for contingency plan design. The dynamic model of the deepwater drilling riser coupled system facilitates the identification of failure structures and critical failure time points. Through the incorporation of temporal factors into Petri net modeling, the optimal timing for each action step can be precisely determined, preventing resource wastage and structural damage from premature or delayed operations. A case study demonstrates the emergency response process. The analysis yielded five contingency plans during ISW propagation. Dynamic catastrophic analysis indicates prioritization should focus on the lower flex joint angle, followed by platform trajectory and mooring line tension. Certain ISW scenarios necessitate concurrent monitoring of mooring tension adjustment and emergency disconnection. The developed contingency plan effectively reduces operational time and costs while maintaining safety standards.
Internal solitary waves (ISWs), characterized by their nonlinearity, large amplitude, and destructive potential, pose significant risks during propagation, potentially causing riser fracture and anchor dragging. This paper presents an alternative to the conventional conservative emergency approach of immediate riser disconnection upon ISW detection. The proposed methodology integrates quantitative dynamic model calculations with Petri-net modeling for contingency plan design. The dynamic model of the deepwater drilling riser coupled system facilitates the identification of failure structures and critical failure time points. Through the incorporation of temporal factors into Petri net modeling, the optimal timing for each action step can be precisely determined, preventing resource wastage and structural damage from premature or delayed operations. A case study demonstrates the emergency response process. The analysis yielded five contingency plans during ISW propagation. Dynamic catastrophic analysis indicates prioritization should focus on the lower flex joint angle, followed by platform trajectory and mooring line tension. Certain ISW scenarios necessitate concurrent monitoring of mooring tension adjustment and emergency disconnection. The developed contingency plan effectively reduces operational time and costs while maintaining safety standards.
2026, 40(3)
:576-589.
doi: 10.1007/s13344-026-0044-y
Abstract:
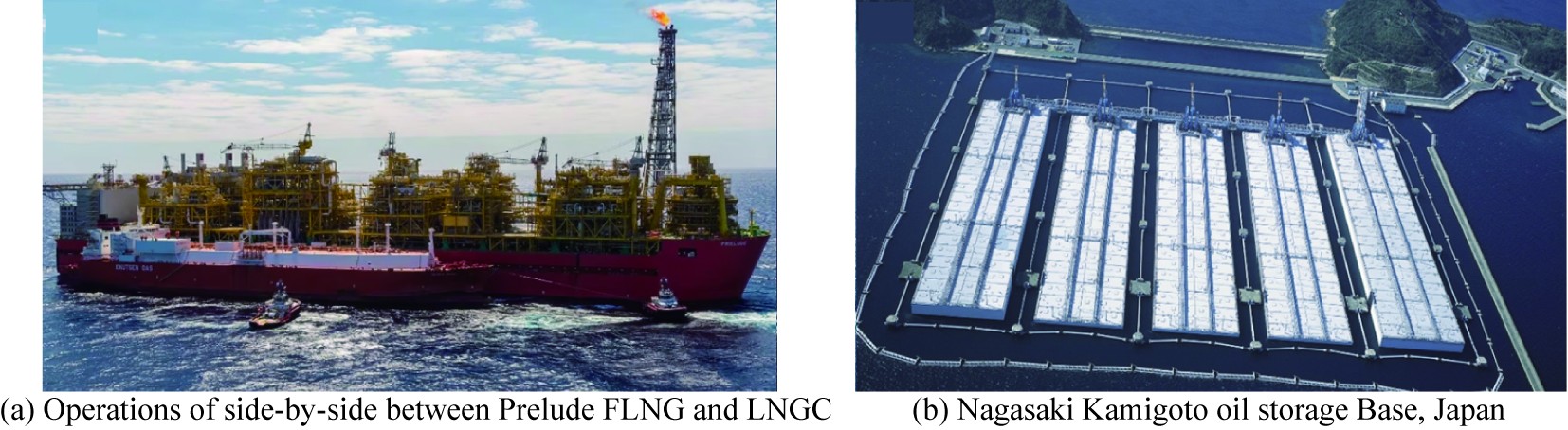
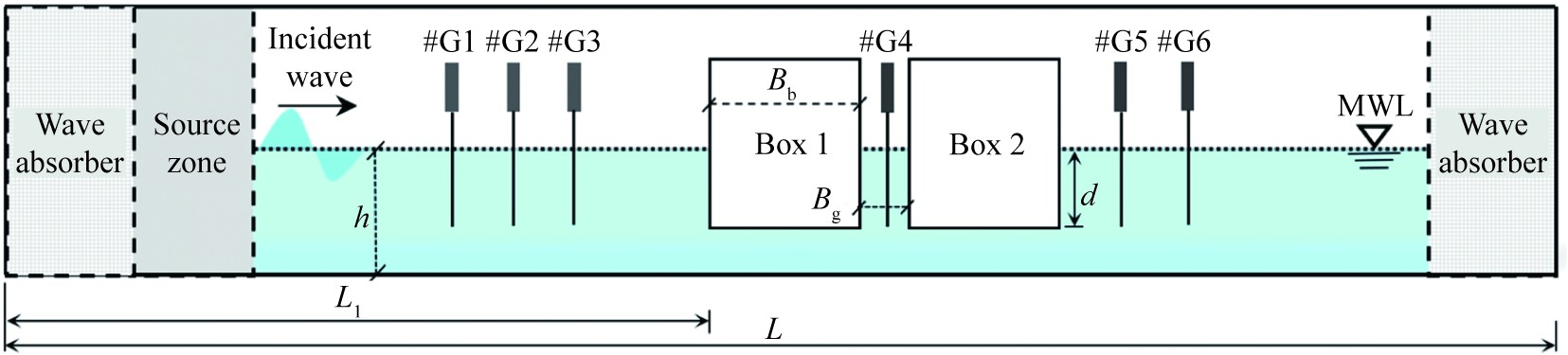
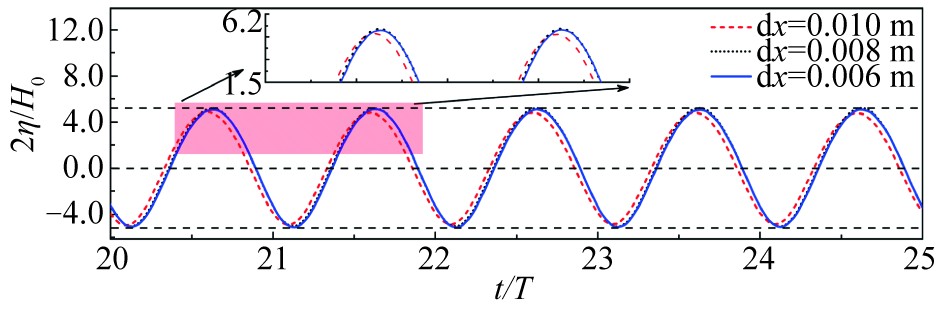
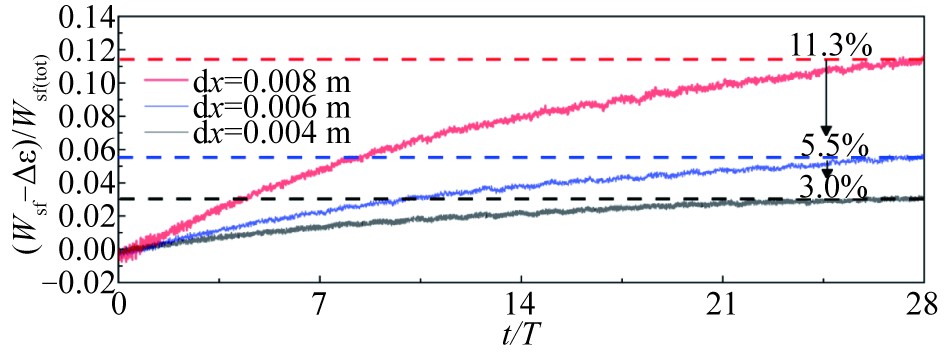
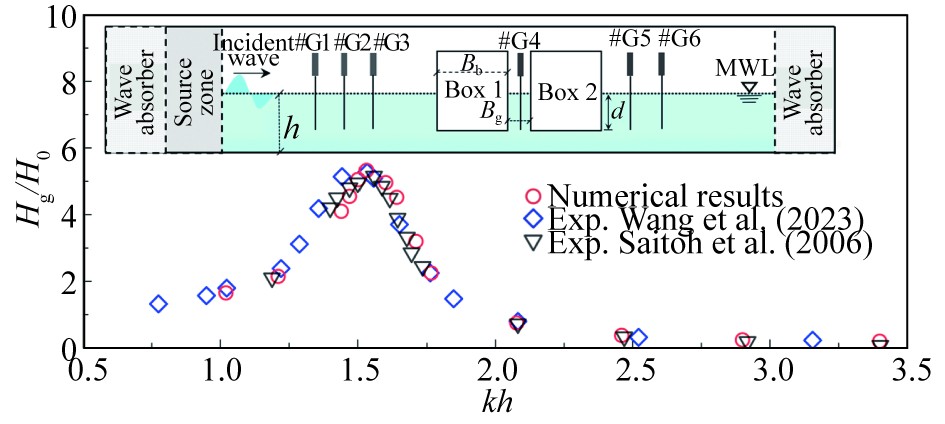
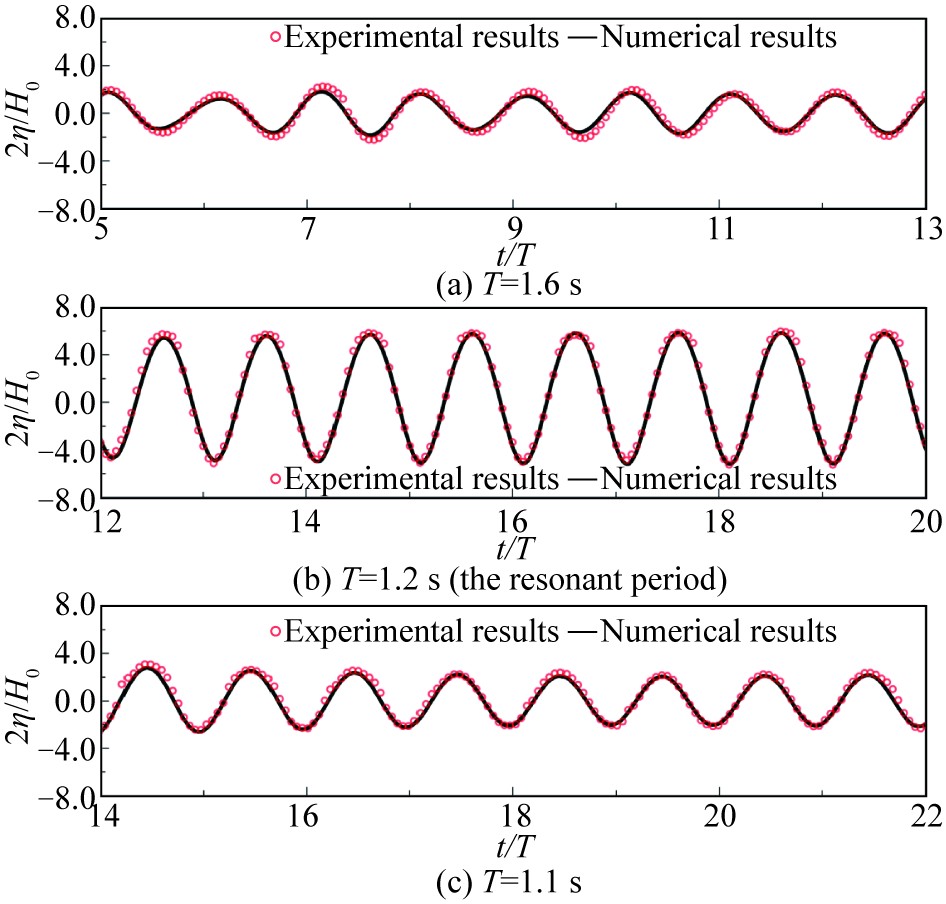
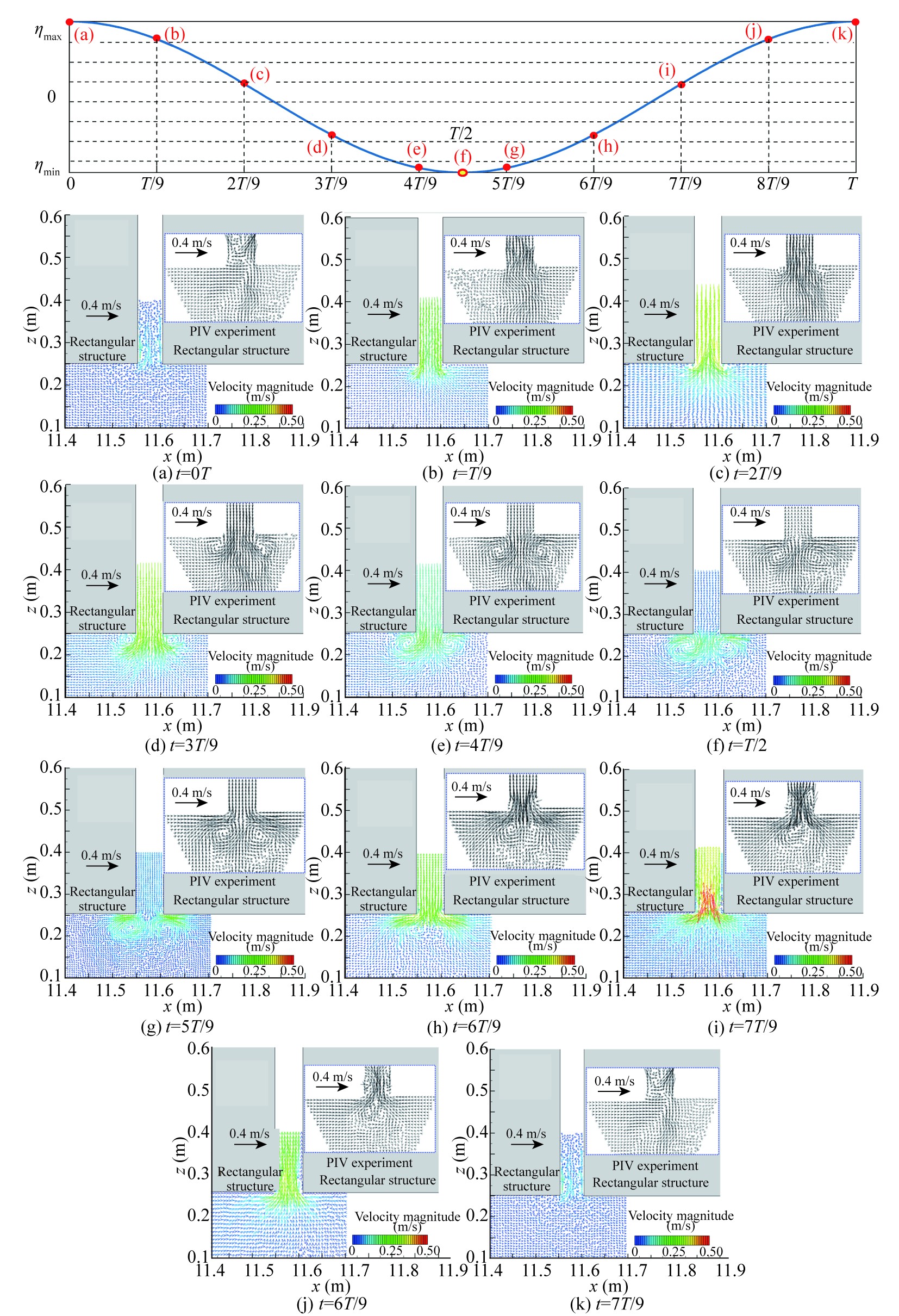
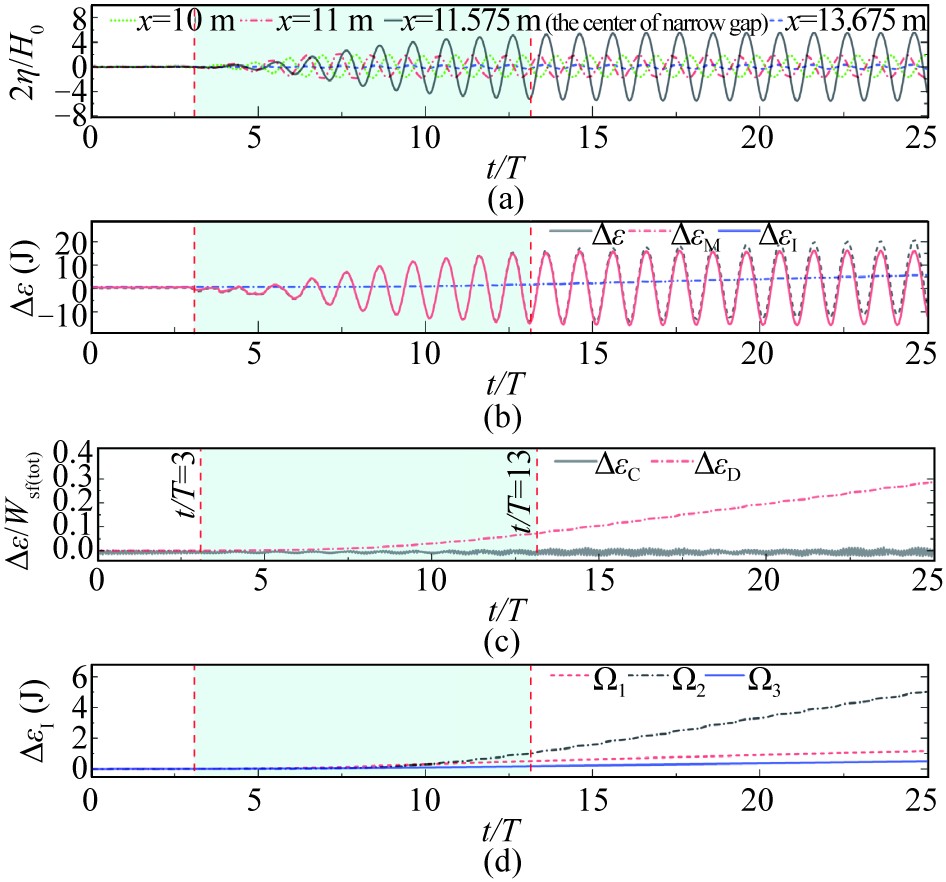
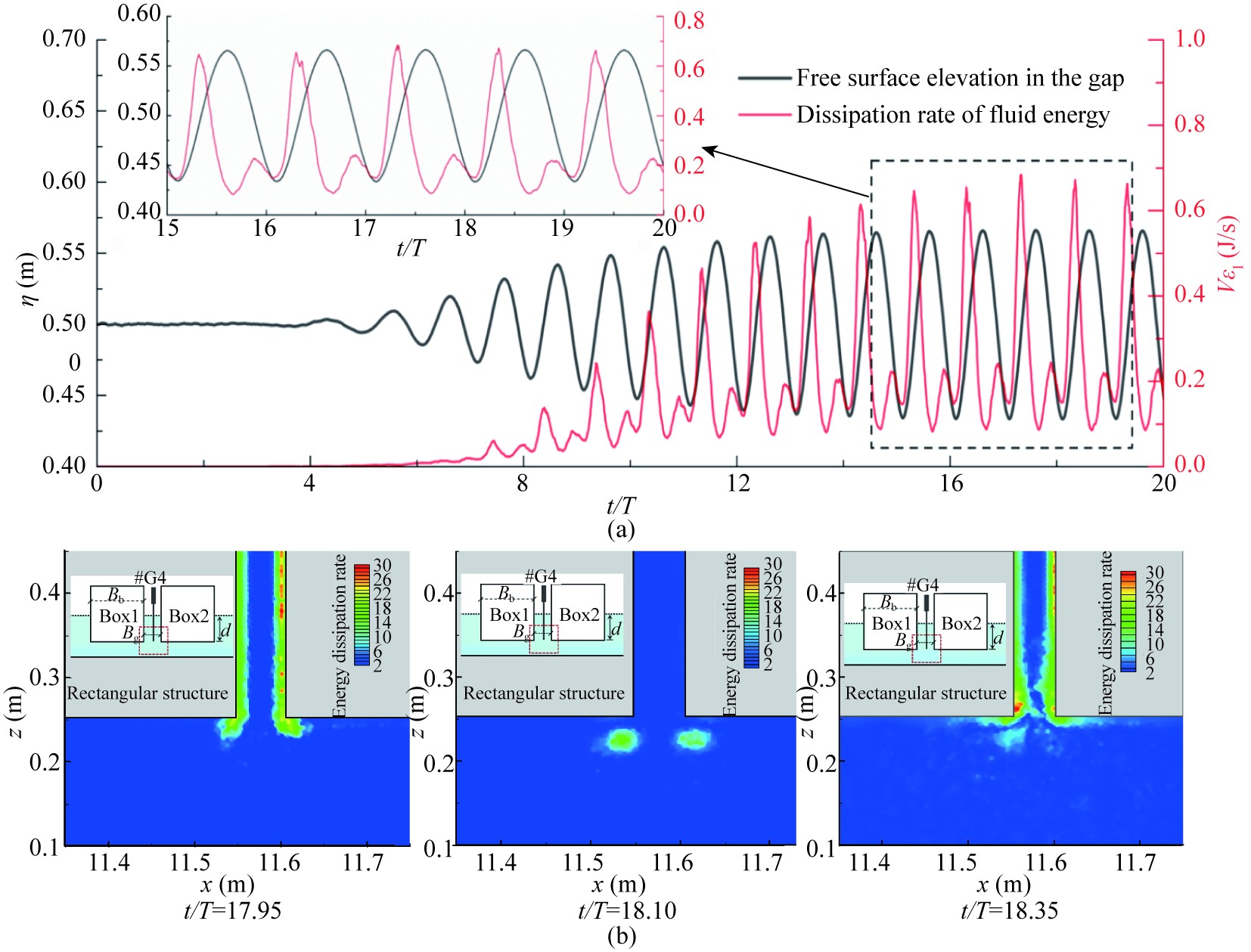
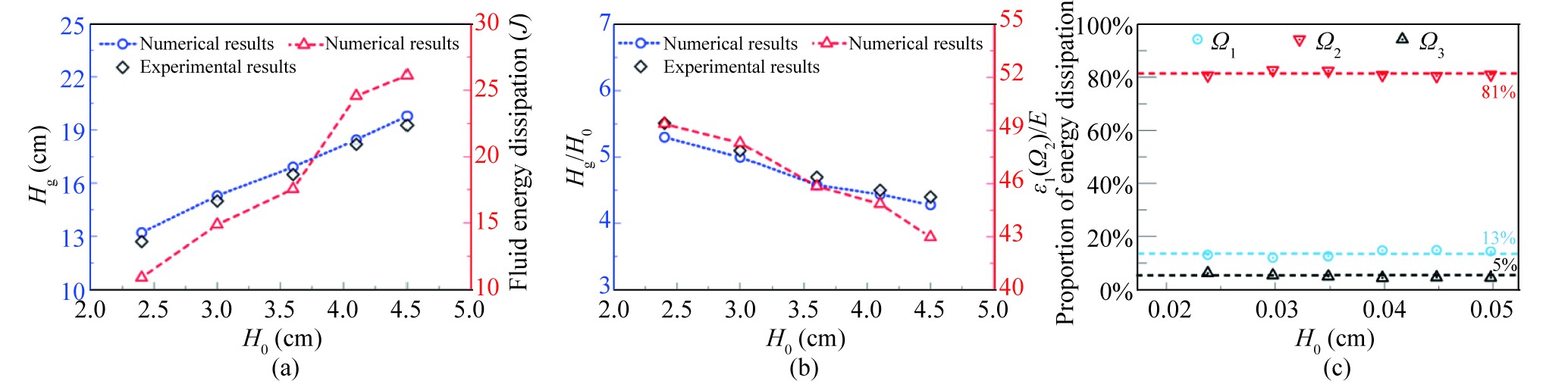
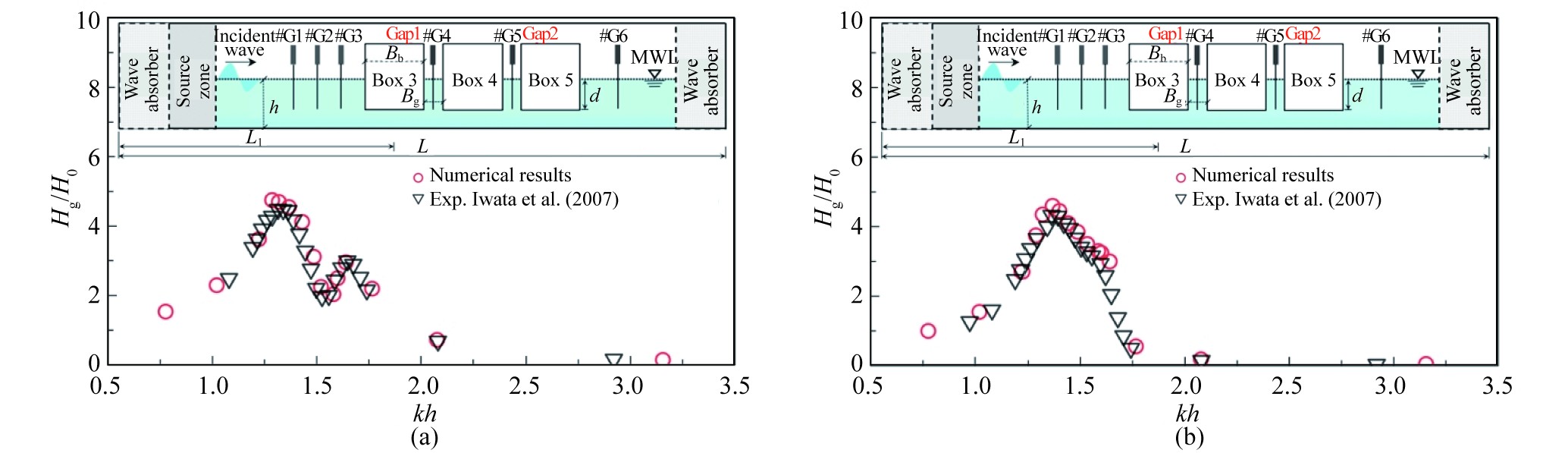
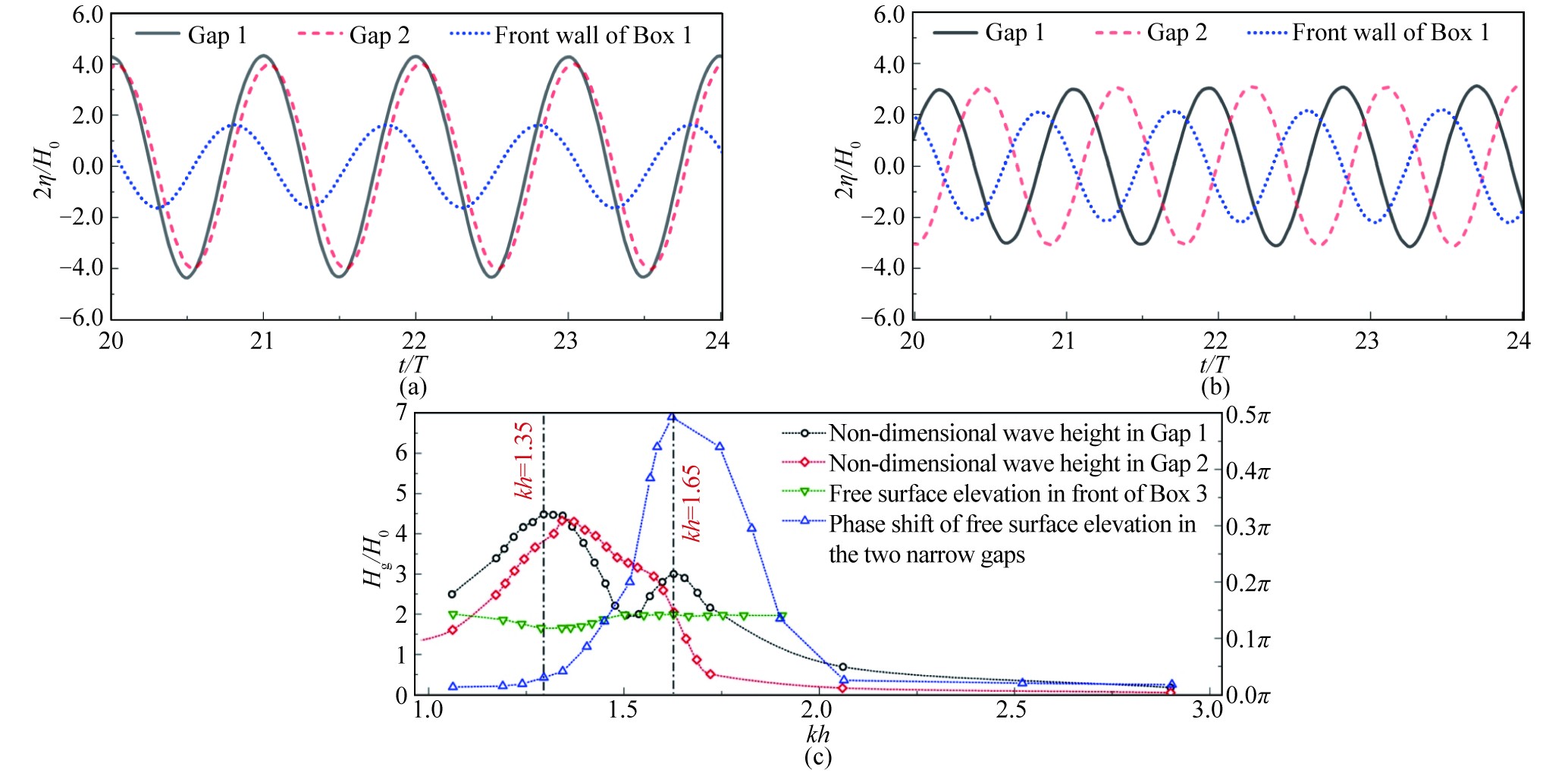
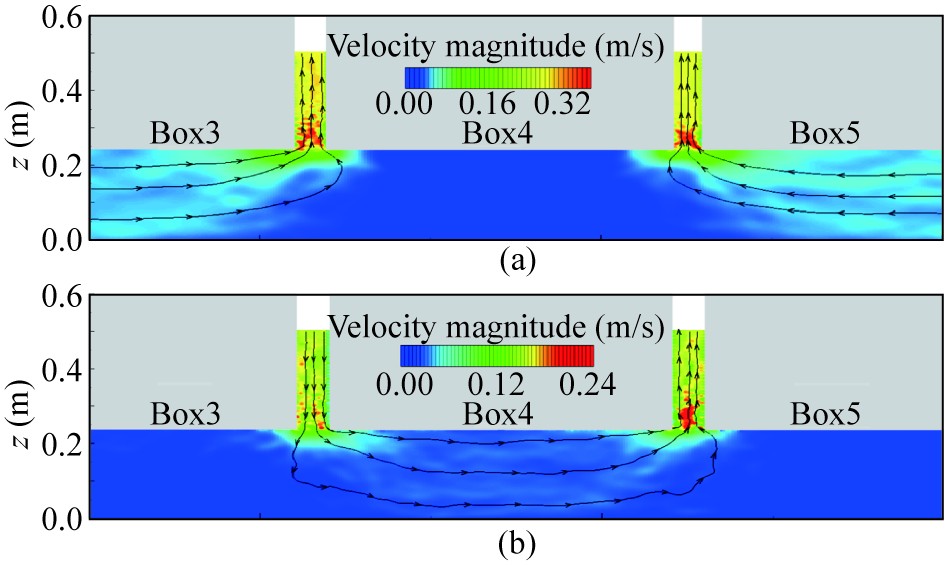
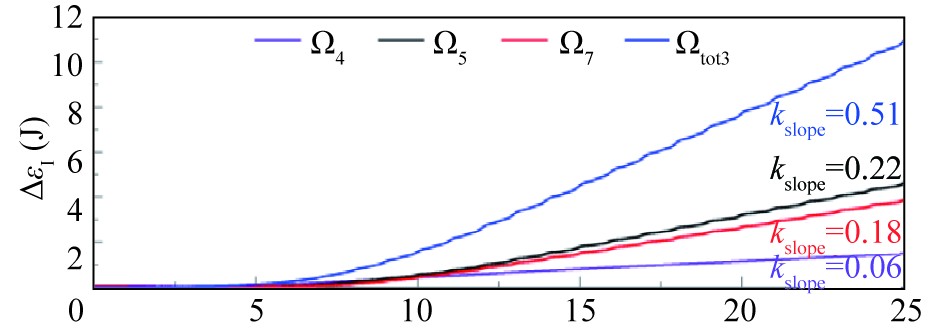
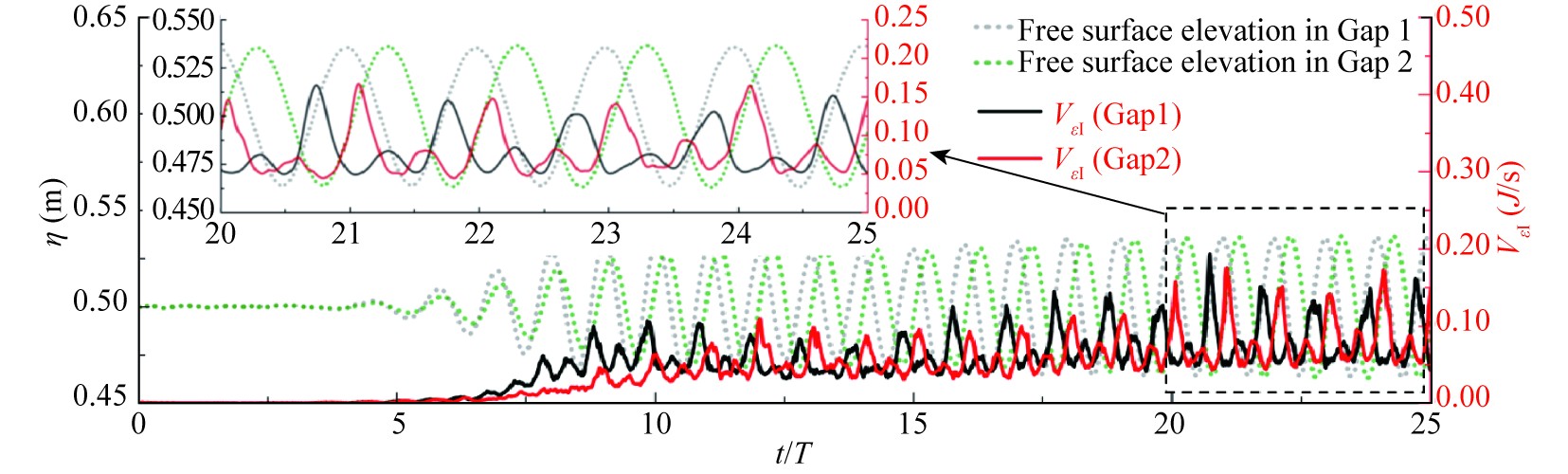
This study quantitatively examined the fluid energy evolution and dissipation process near narrow gaps formed between multiple floating rectangular structures under wave-induced gap resonance conditions. Given the limited understanding of gap resonance mechanisms through fluid energy analysis, a numerical wave flume based on the δ-LES-Smoothed Particle Hydrodynamics (SPH) approach was developed to investigate how incident wave and structural parameters influence the temporal evolution of fluid energy components. The findings reveal that for two floating boxes, the fluid energy dissipation within one wave period in the gap region between the boxes constitutes 81% of the total fluid energy dissipation in the fluid domain. This proportion remains consistent across varying incident wave heights under gap resonance conditions. The temporal distribution of fluid energy dissipation rate shows two peak values within one wave period, exhibiting significant waveform asymmetry. Additionally, in three-box configurations, the two narrow gap regions serve as primary zones of fluid energy dissipation, with energy dissipation patterns closely resembling those observed in the single gap region. Through comprehensive analysis of fluid energy evolution, this research advances the fundamental understanding of gap resonance mechanisms.
This study quantitatively examined the fluid energy evolution and dissipation process near narrow gaps formed between multiple floating rectangular structures under wave-induced gap resonance conditions. Given the limited understanding of gap resonance mechanisms through fluid energy analysis, a numerical wave flume based on the δ-LES-Smoothed Particle Hydrodynamics (SPH) approach was developed to investigate how incident wave and structural parameters influence the temporal evolution of fluid energy components. The findings reveal that for two floating boxes, the fluid energy dissipation within one wave period in the gap region between the boxes constitutes 81% of the total fluid energy dissipation in the fluid domain. This proportion remains consistent across varying incident wave heights under gap resonance conditions. The temporal distribution of fluid energy dissipation rate shows two peak values within one wave period, exhibiting significant waveform asymmetry. Additionally, in three-box configurations, the two narrow gap regions serve as primary zones of fluid energy dissipation, with energy dissipation patterns closely resembling those observed in the single gap region. Through comprehensive analysis of fluid energy evolution, this research advances the fundamental understanding of gap resonance mechanisms.

2026, 40(3)
:590-603.
doi: 10.1007/s13344-026-0045-x
Abstract:
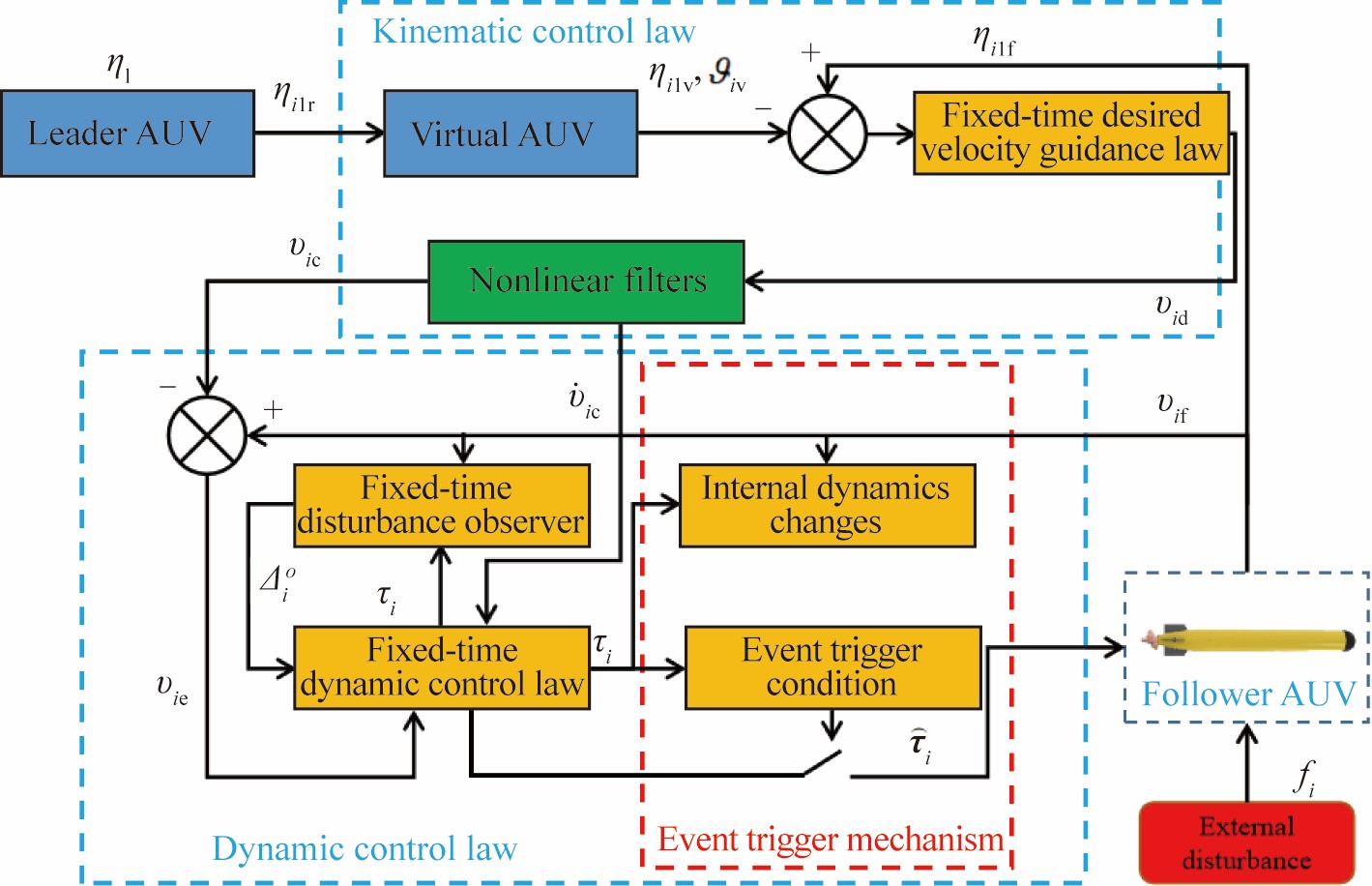
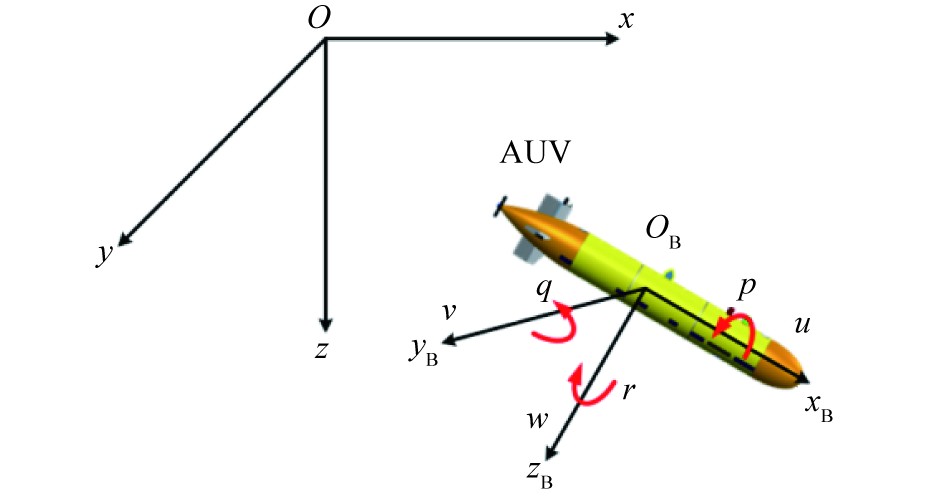
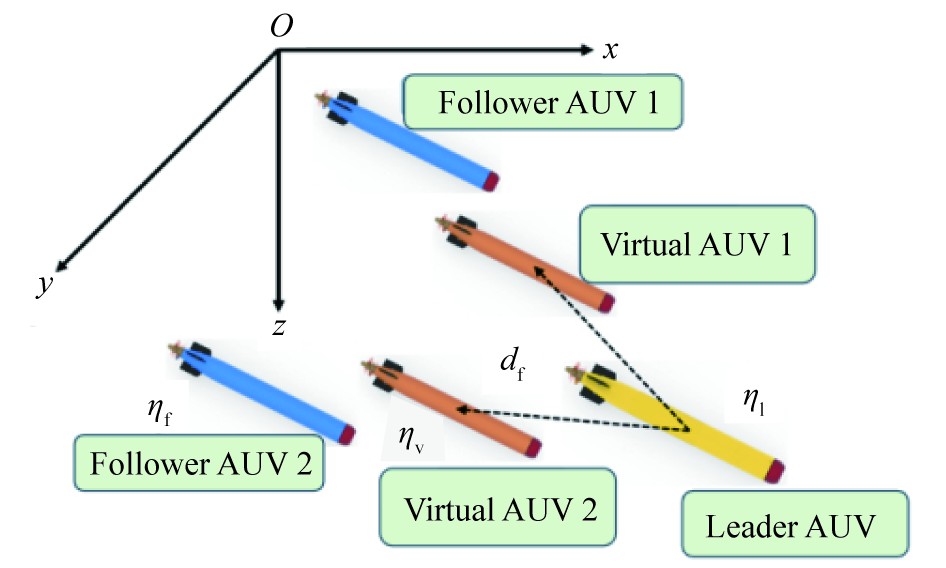
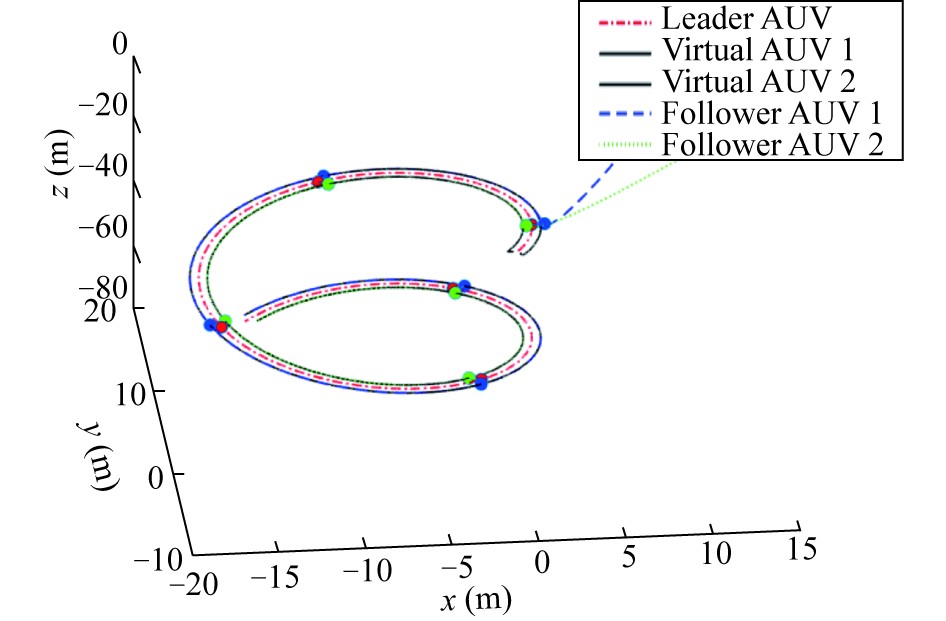
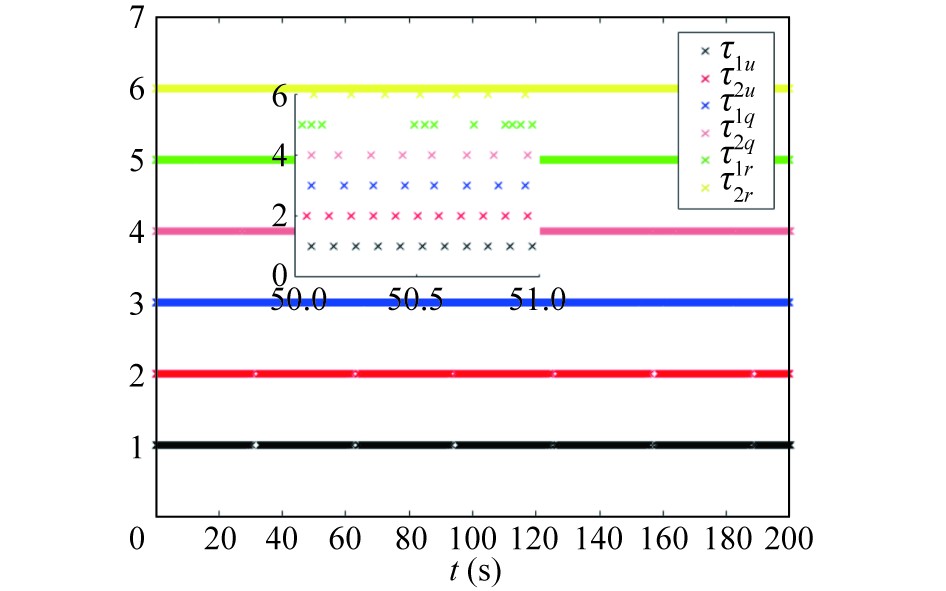
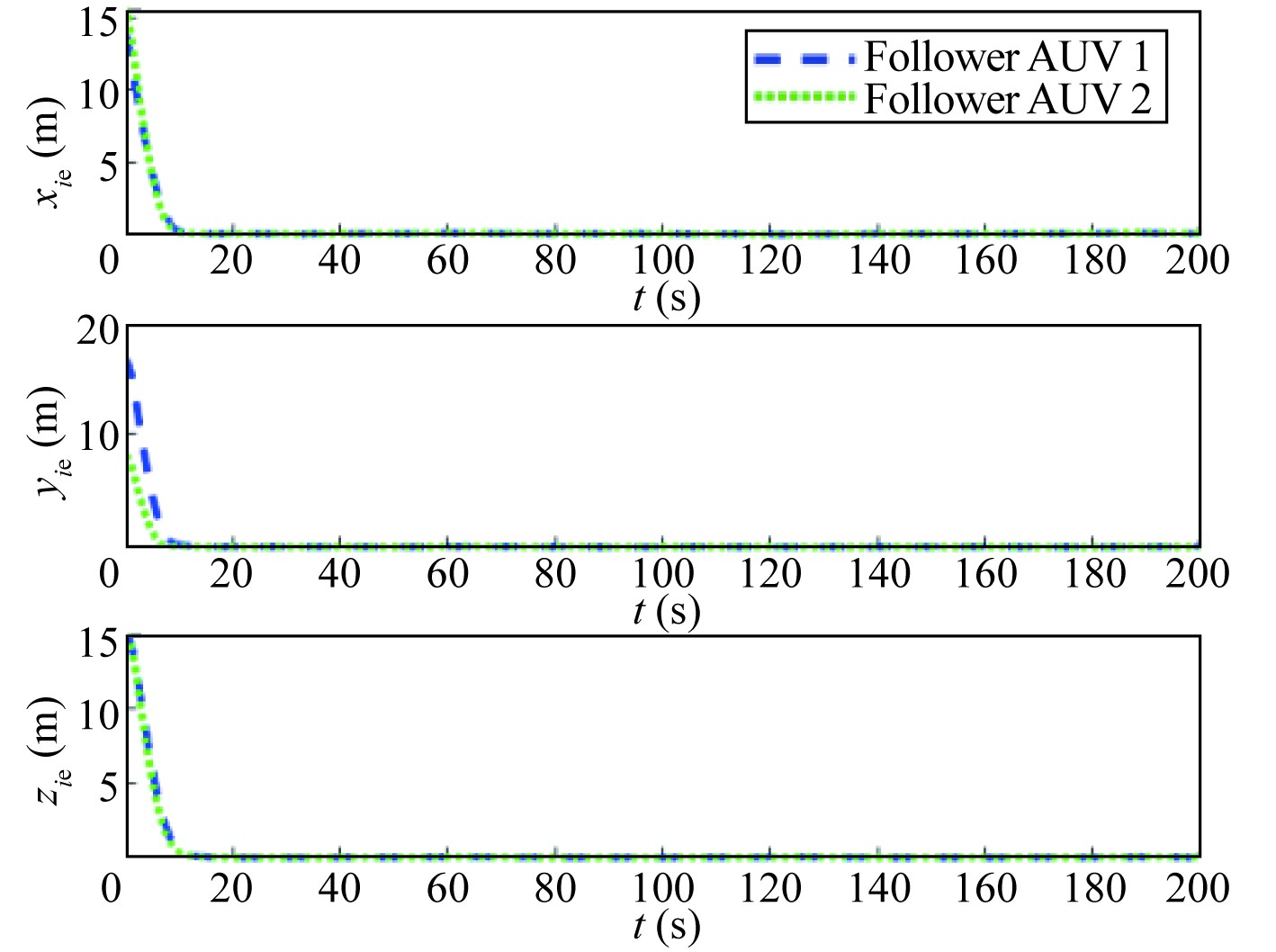
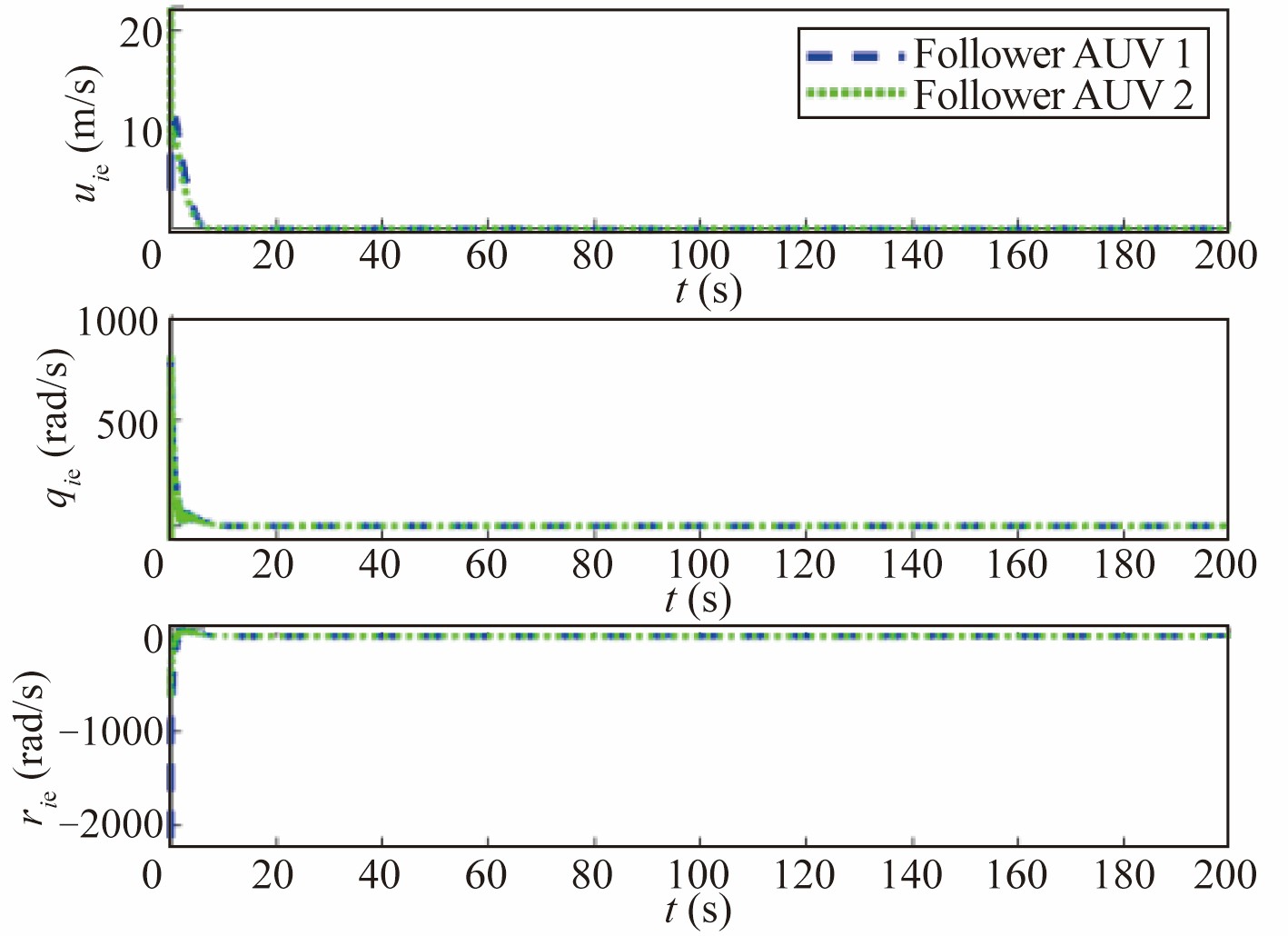
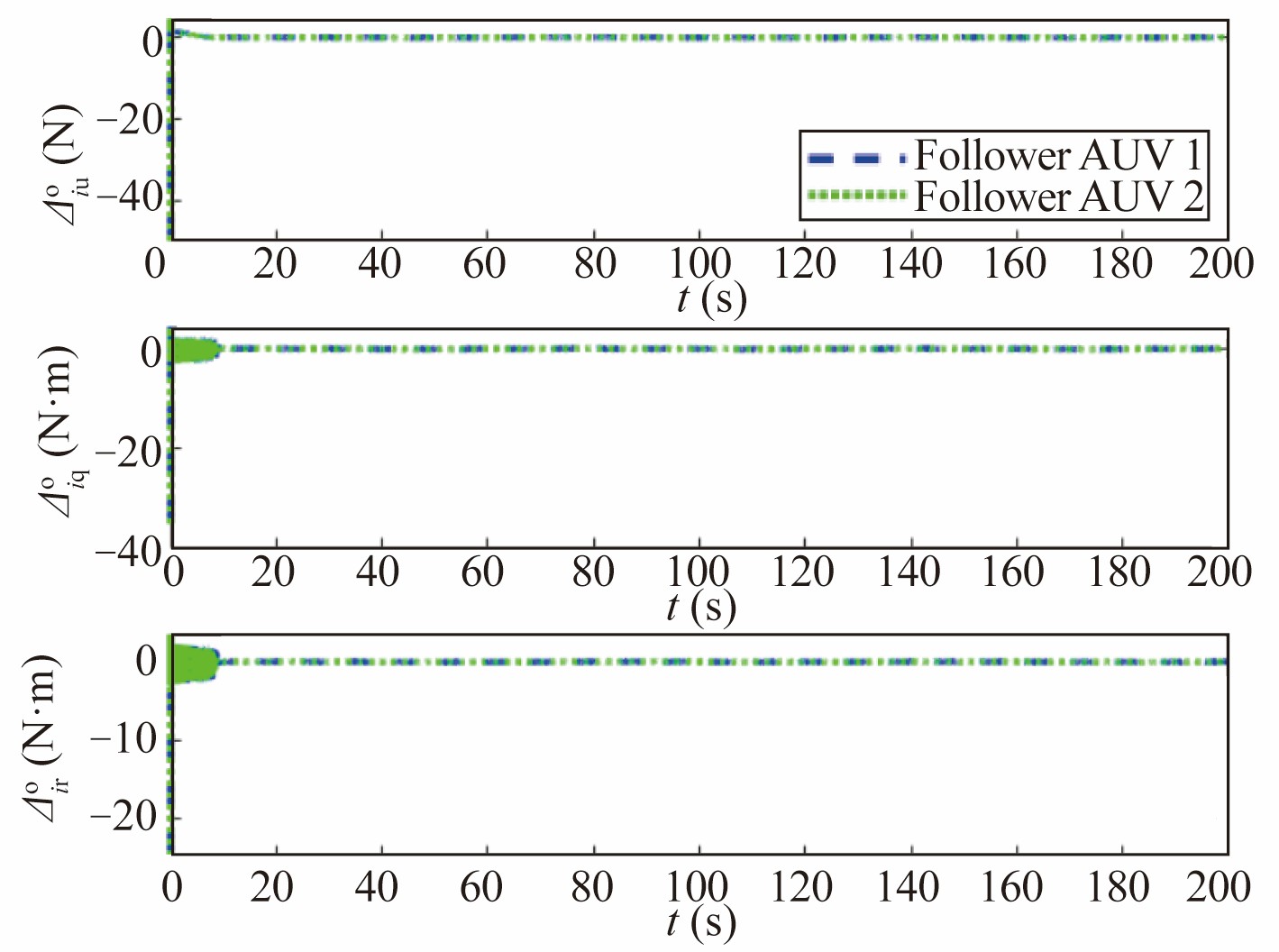
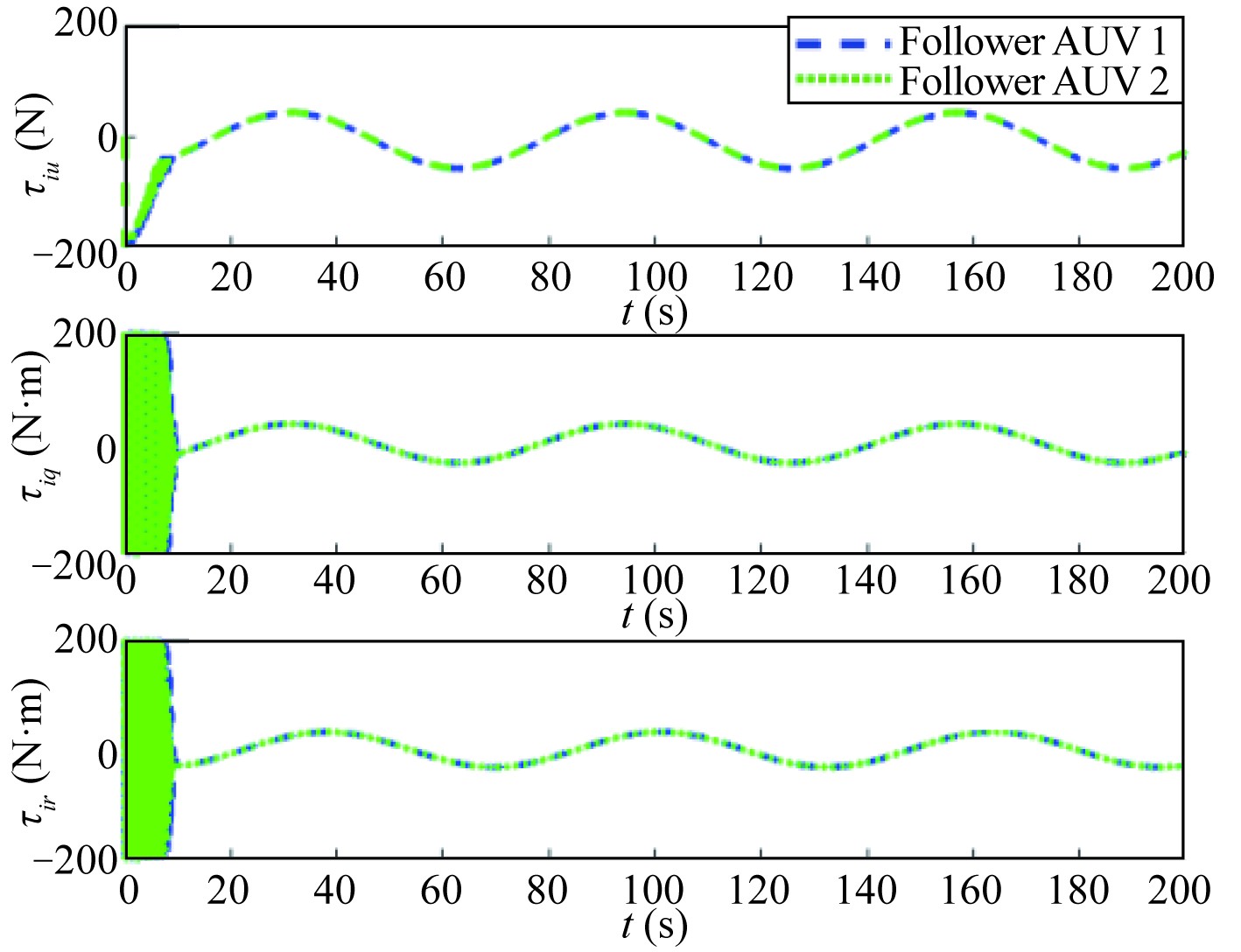
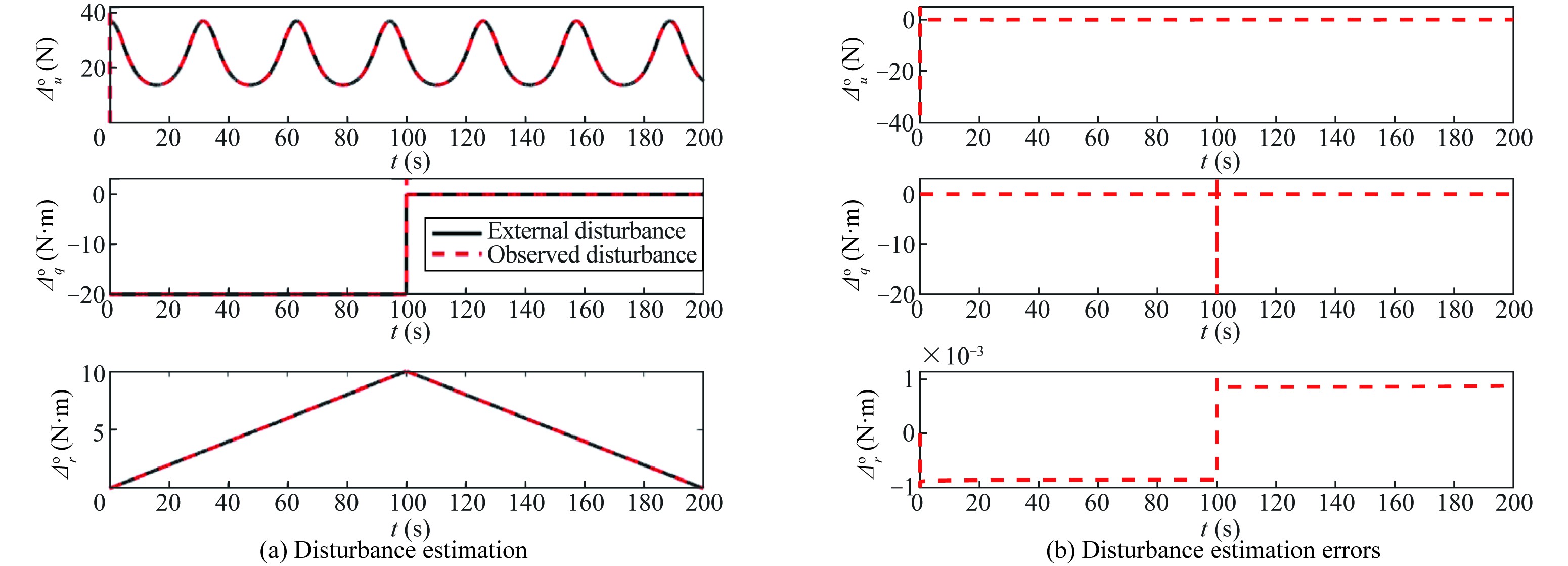
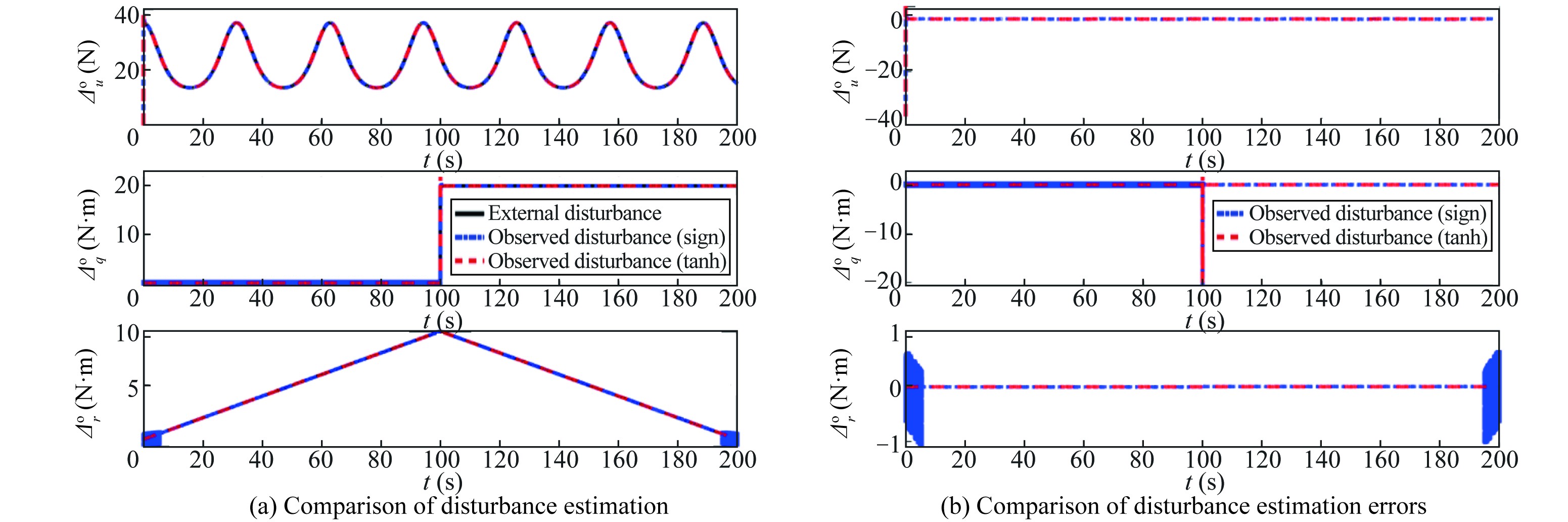
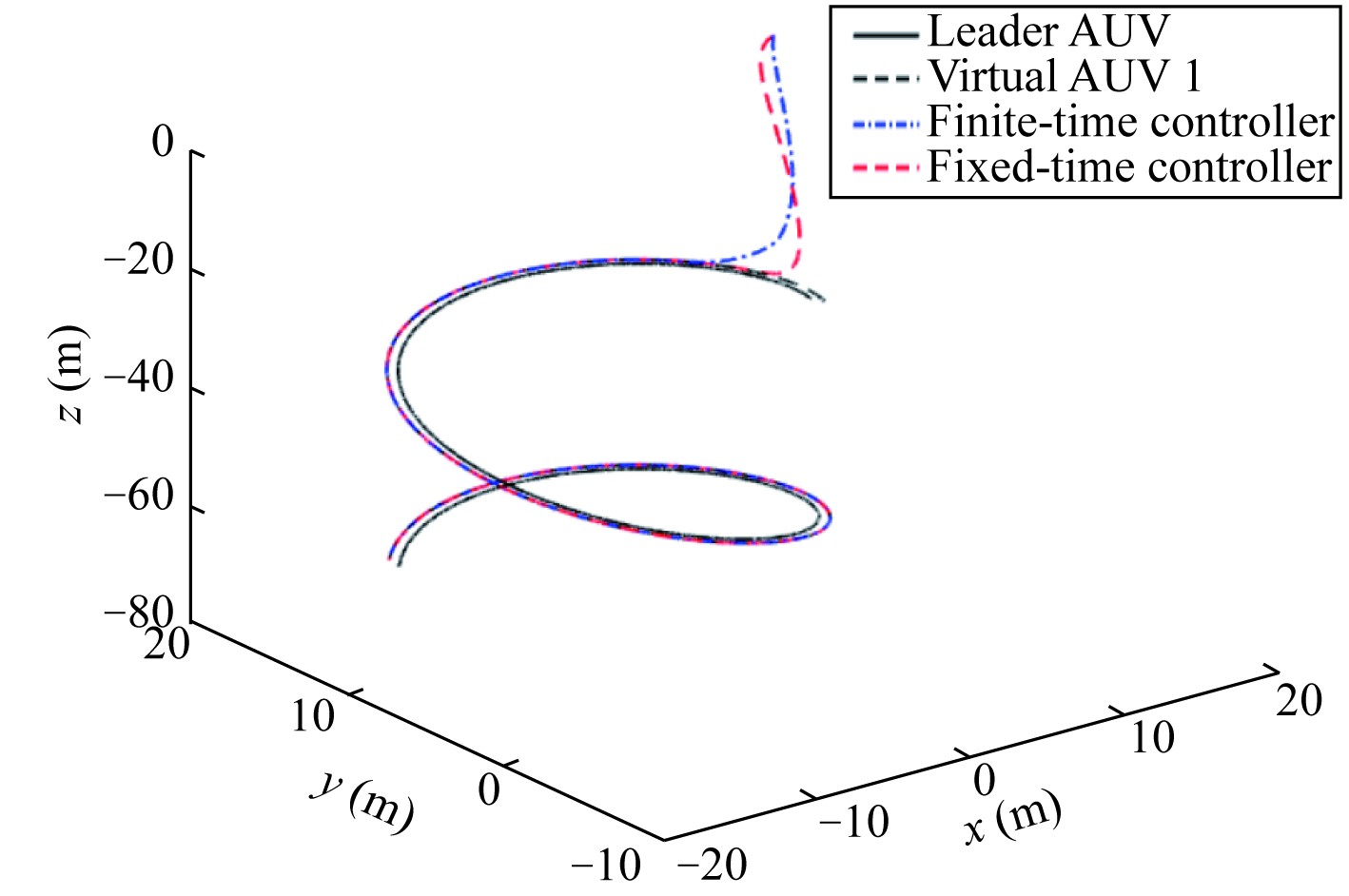
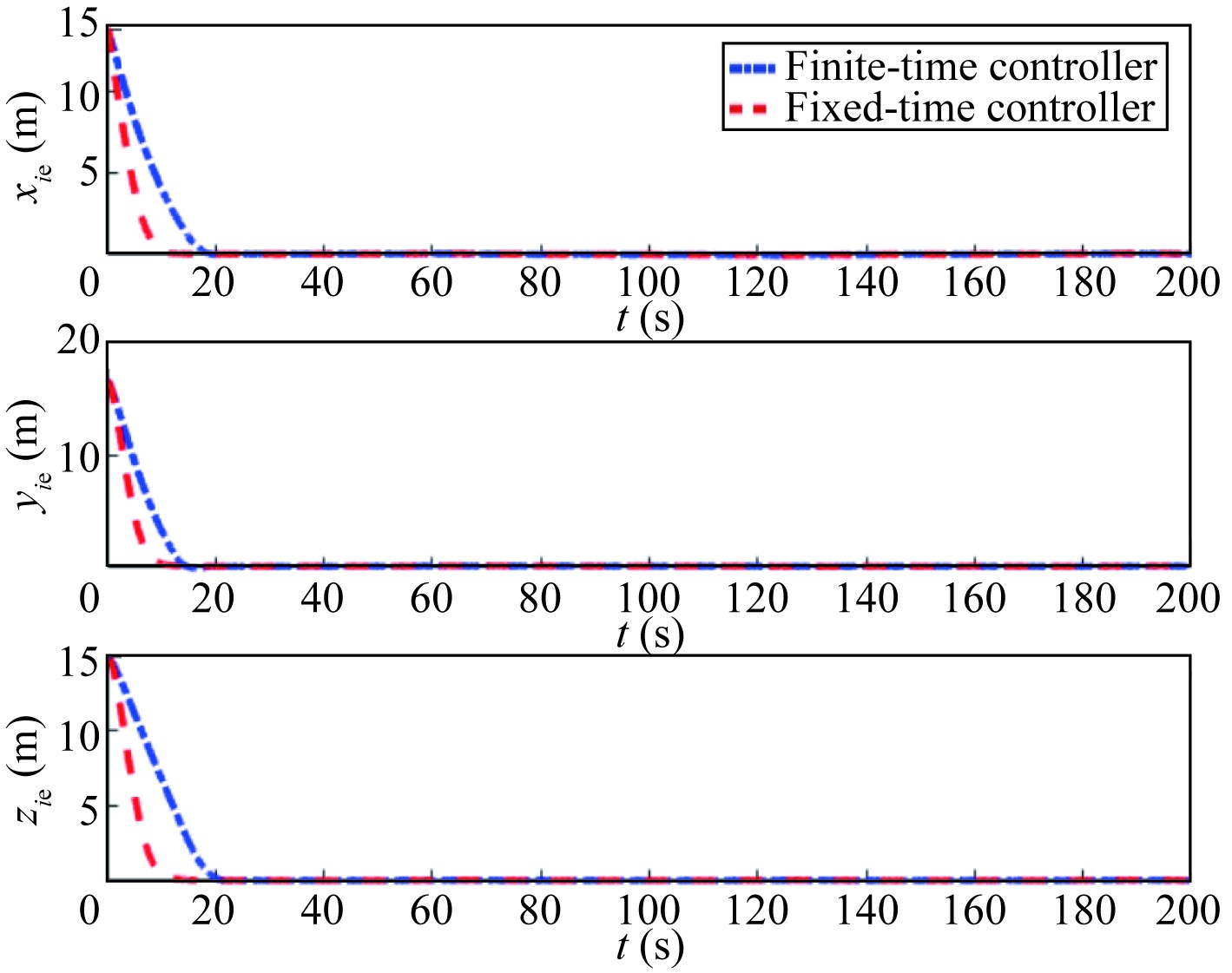
This research presents a fixed-time three-dimensional formation control strategy for underactuated autonomous underwater vehicles (AUVs) utilizing an event-triggered mechanism. The study introduces virtual AUVs to transform the formation control problem into a trajectory tracking challenge. A virtual velocity regulation law is developed for virtual AUVs, enabling follower AUVs to track the reference position through virtual AUVs without requiring the leader autonomous underwater vehicle’s velocity information. To manage system uncertainties, the research implements a fixed-time disturbance observer based on AUV dynamic models, providing accurate estimations of parameter uncertainties and external disturbances. Through the backstepping approach, an expected velocity regulation law is formulated for underactuated AUVs, ensuring position tracking error convergence within a fixed time. Additionally, a fixed-time dynamic controller is implemented to facilitate rapid achievement of expected velocity by the follower AUV, while the event-triggered mechanism reduces control input triggering frequency. The stability analysis, based on Lyapunov theory, demonstrates that the closed-loop system’s tracking error converges to a compact residual set within a fixed time. Comparative simulation results confirm the proposed algorithm’s enhanced performance.
This research presents a fixed-time three-dimensional formation control strategy for underactuated autonomous underwater vehicles (AUVs) utilizing an event-triggered mechanism. The study introduces virtual AUVs to transform the formation control problem into a trajectory tracking challenge. A virtual velocity regulation law is developed for virtual AUVs, enabling follower AUVs to track the reference position through virtual AUVs without requiring the leader autonomous underwater vehicle’s velocity information. To manage system uncertainties, the research implements a fixed-time disturbance observer based on AUV dynamic models, providing accurate estimations of parameter uncertainties and external disturbances. Through the backstepping approach, an expected velocity regulation law is formulated for underactuated AUVs, ensuring position tracking error convergence within a fixed time. Additionally, a fixed-time dynamic controller is implemented to facilitate rapid achievement of expected velocity by the follower AUV, while the event-triggered mechanism reduces control input triggering frequency. The stability analysis, based on Lyapunov theory, demonstrates that the closed-loop system’s tracking error converges to a compact residual set within a fixed time. Comparative simulation results confirm the proposed algorithm’s enhanced performance.
2026, 40(3)
:604-618.
doi: 10.1007/s13344-026-0046-9
Abstract:
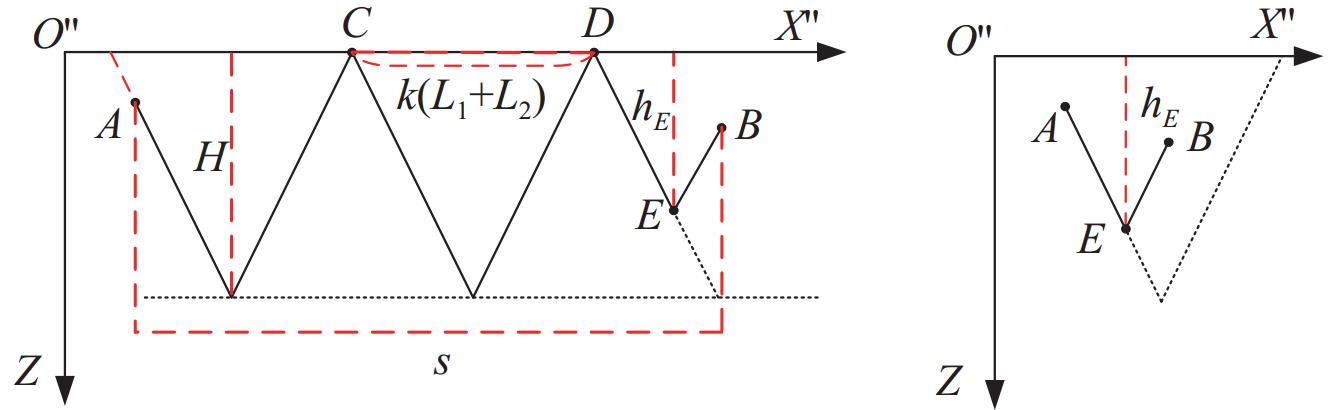
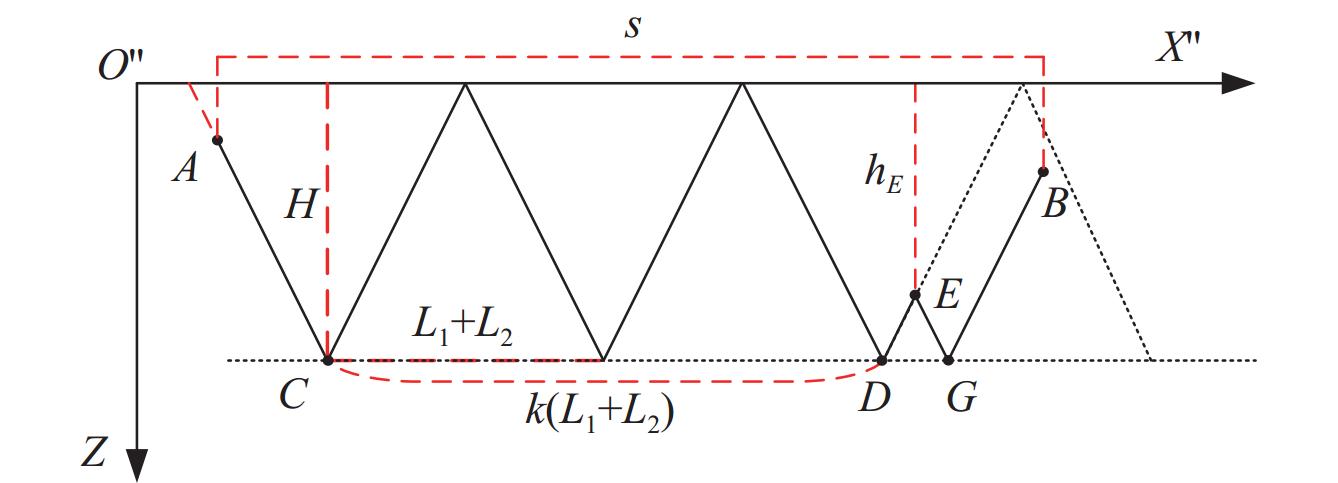
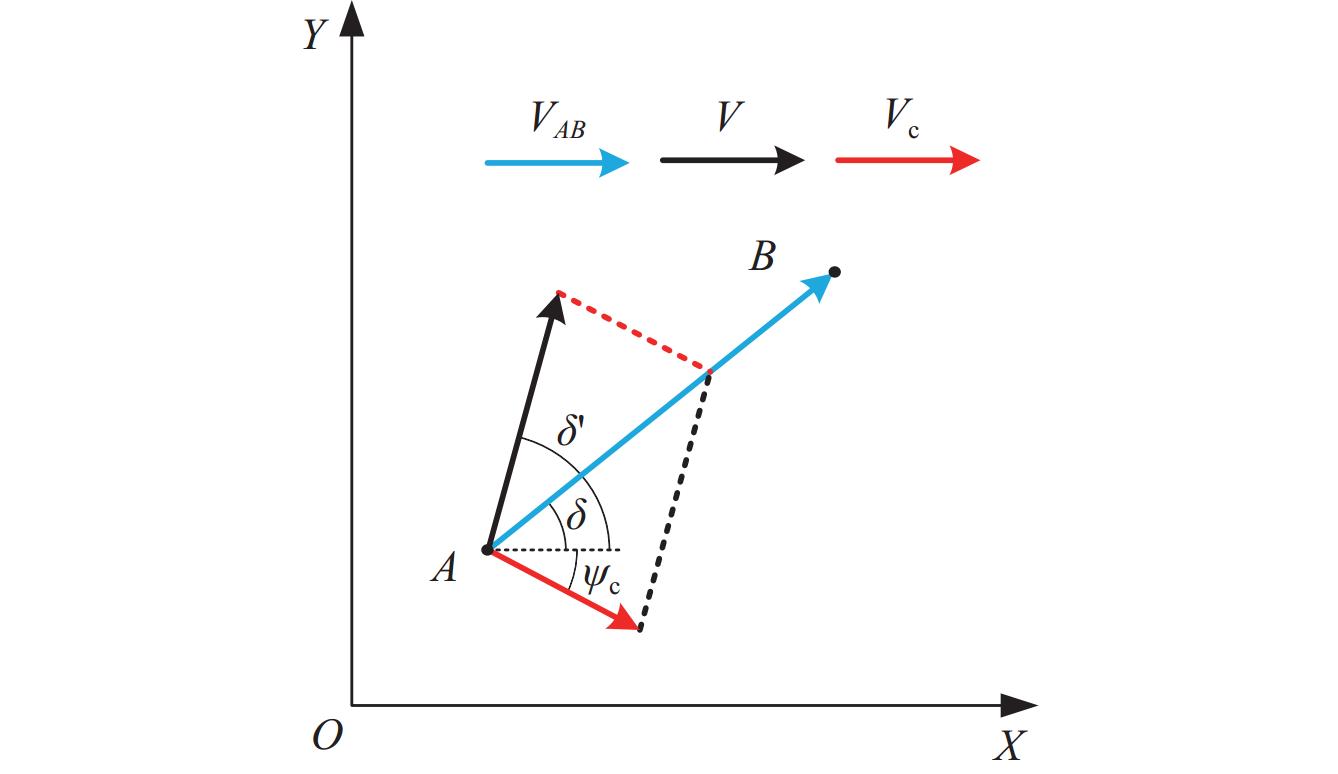
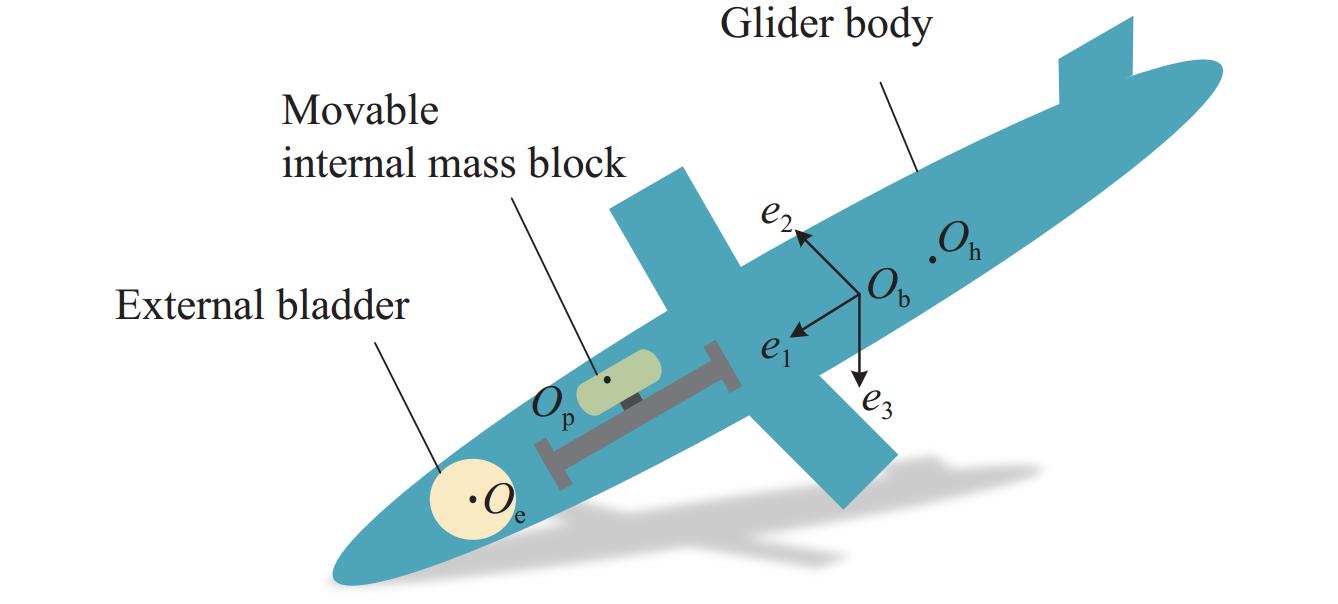
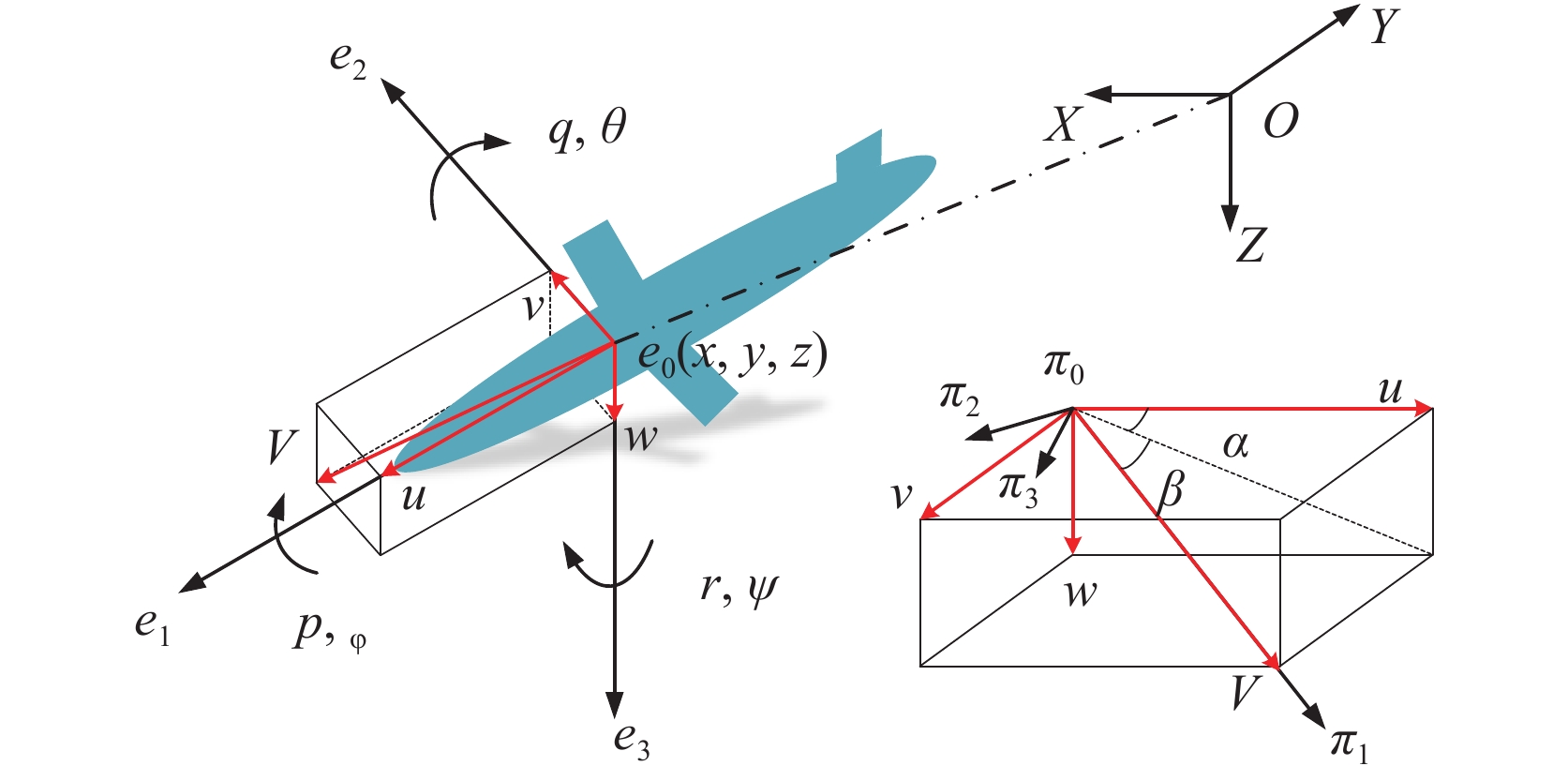
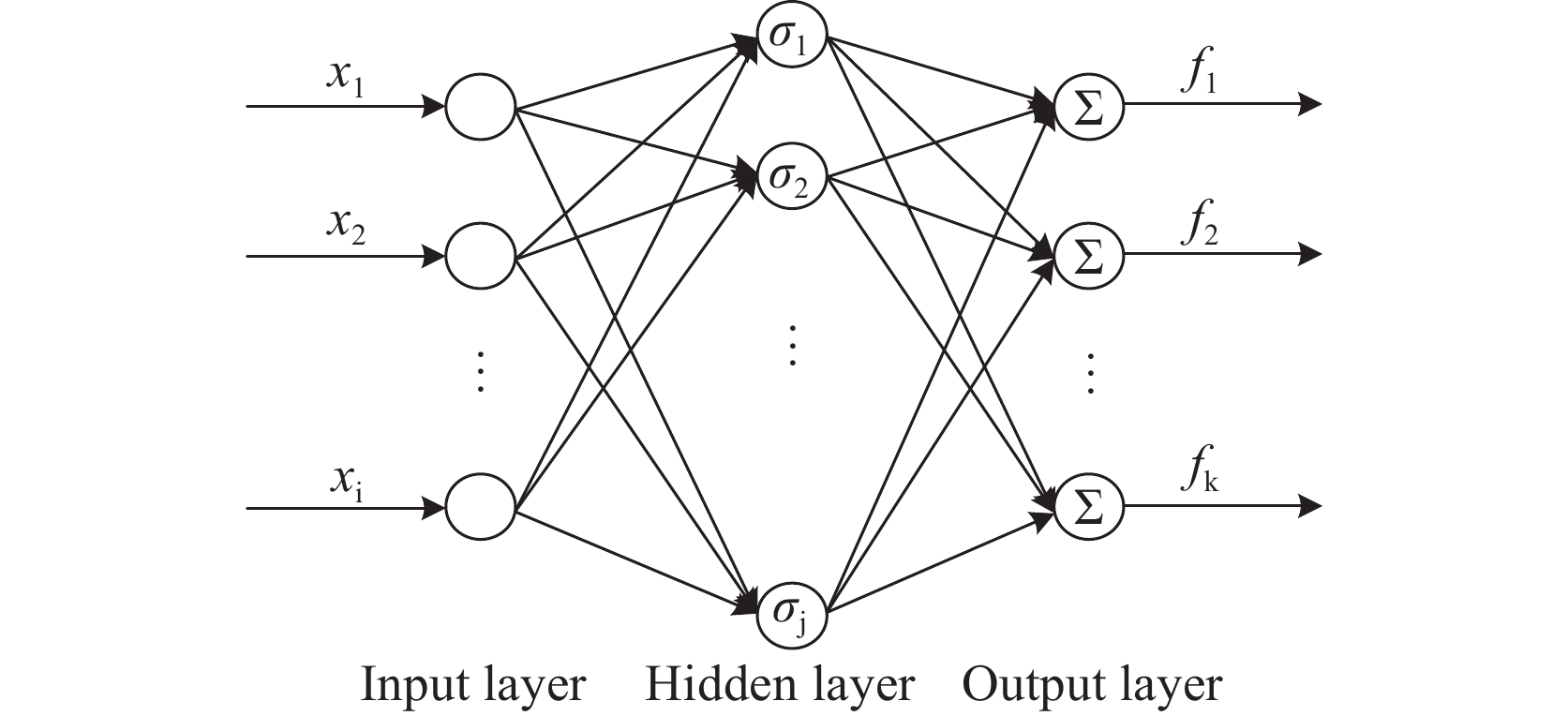
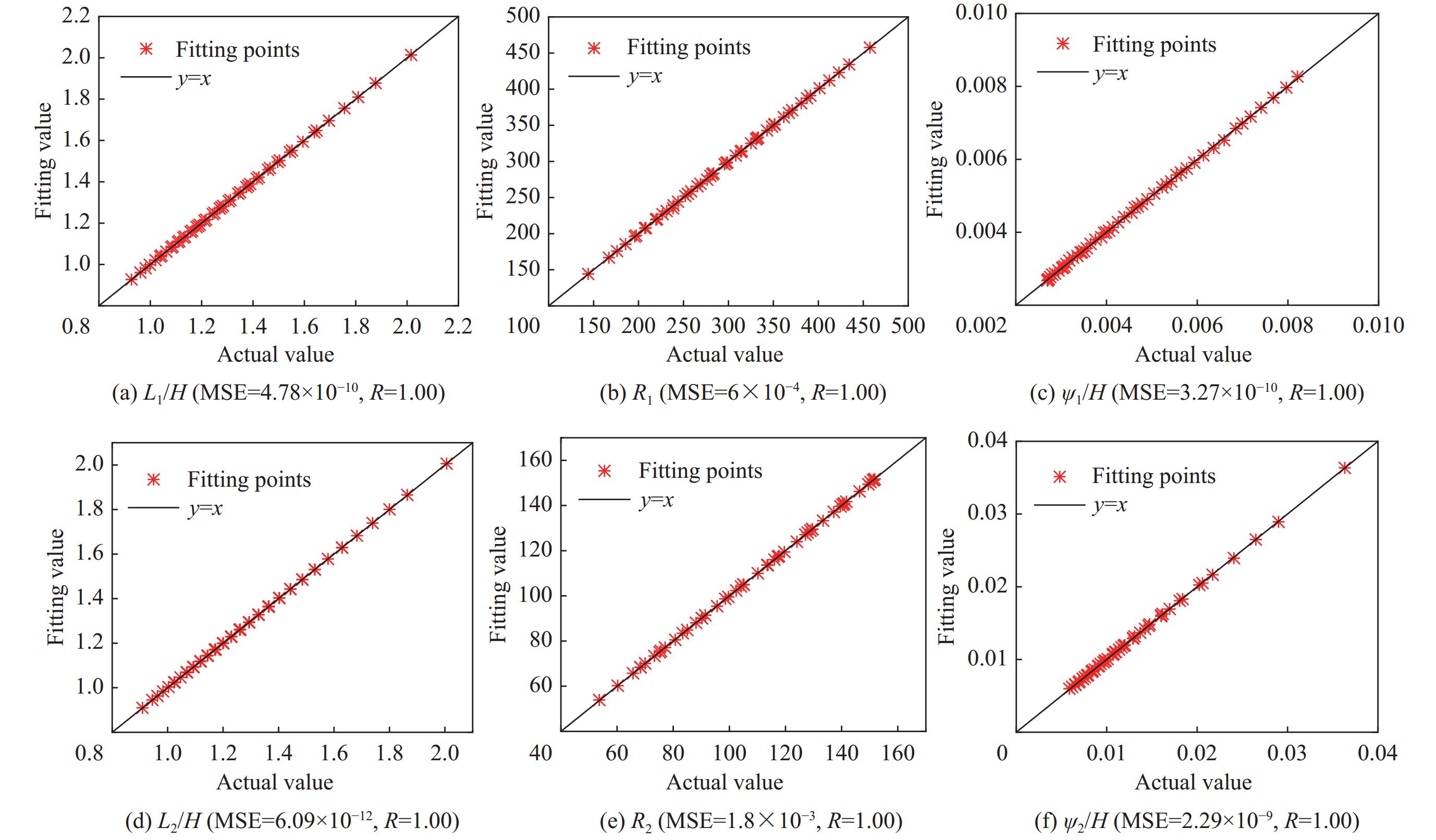
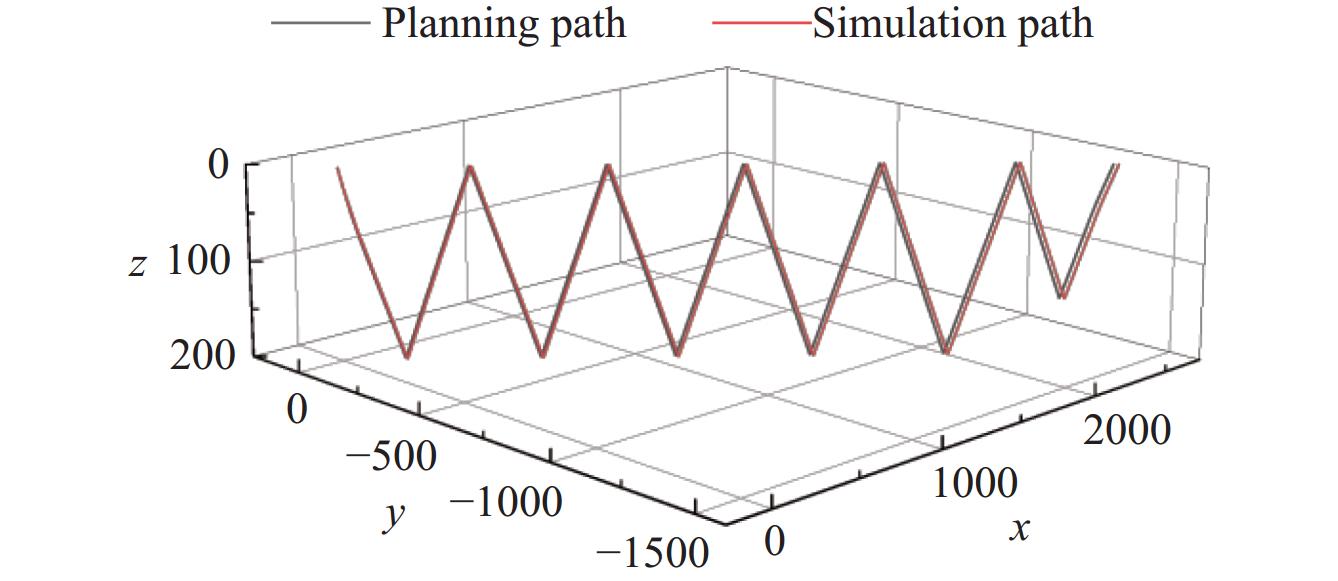
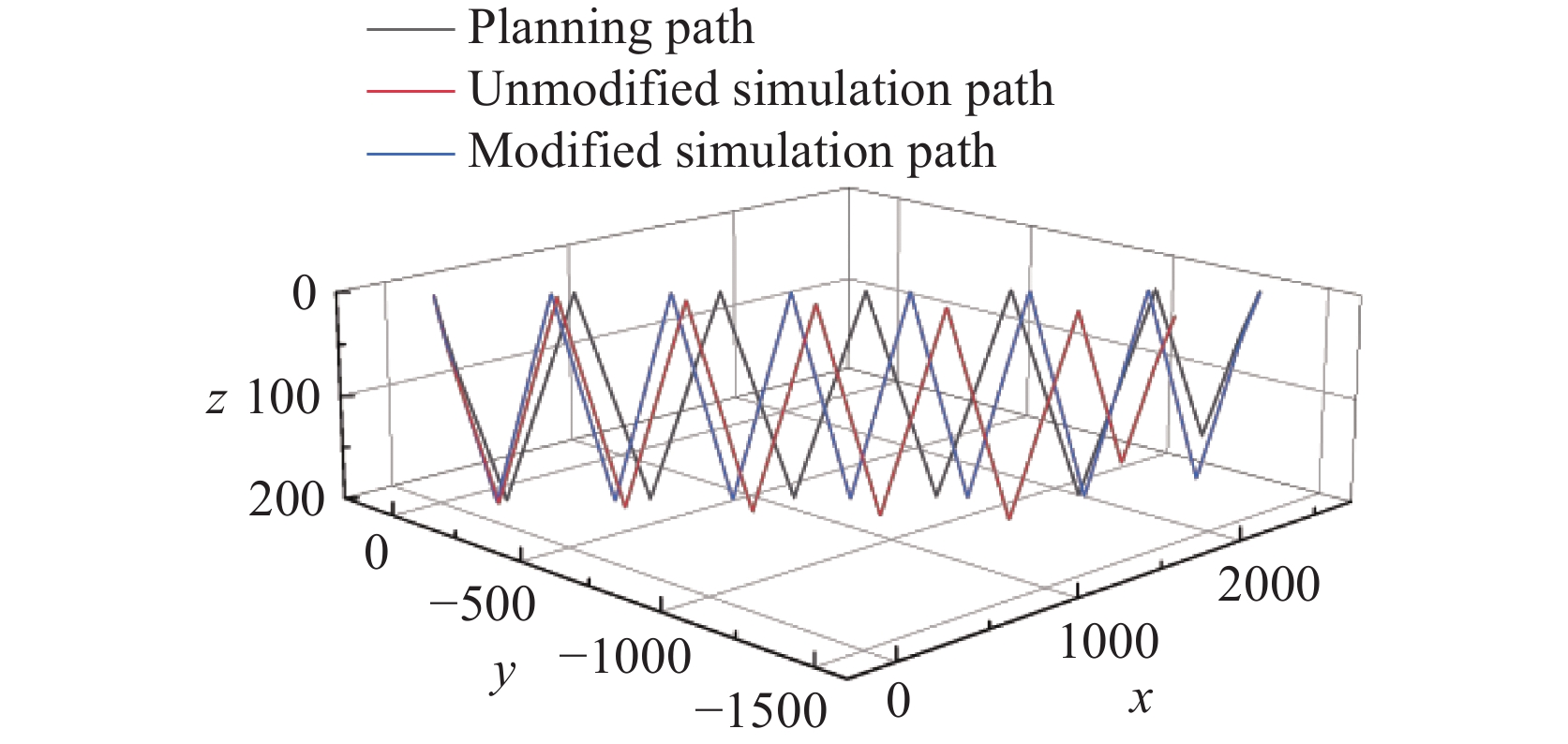
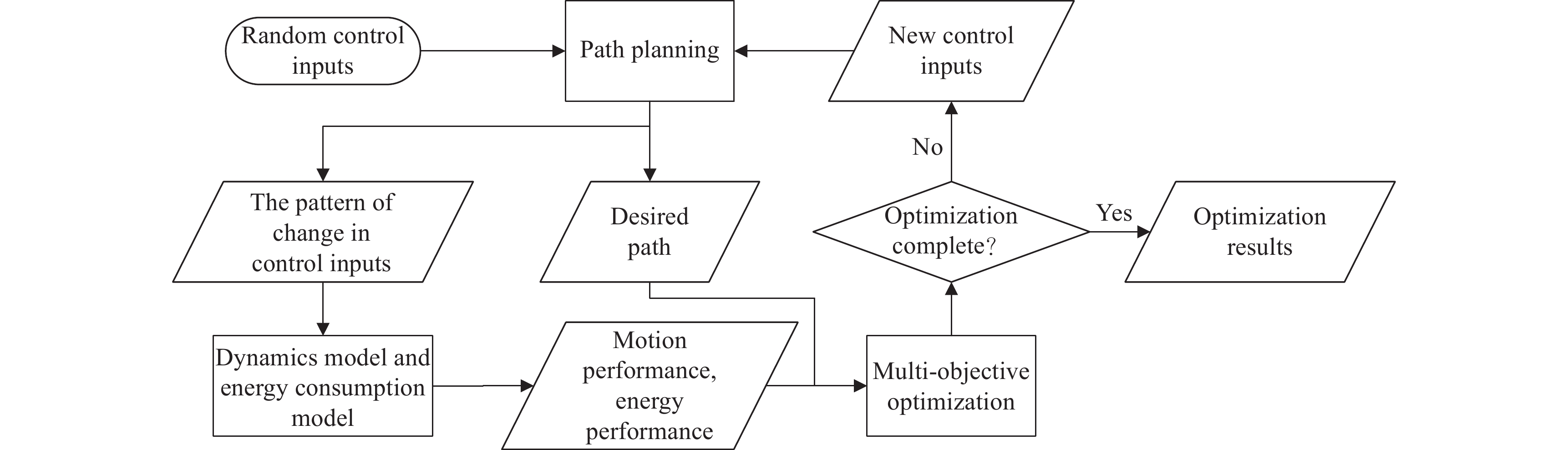
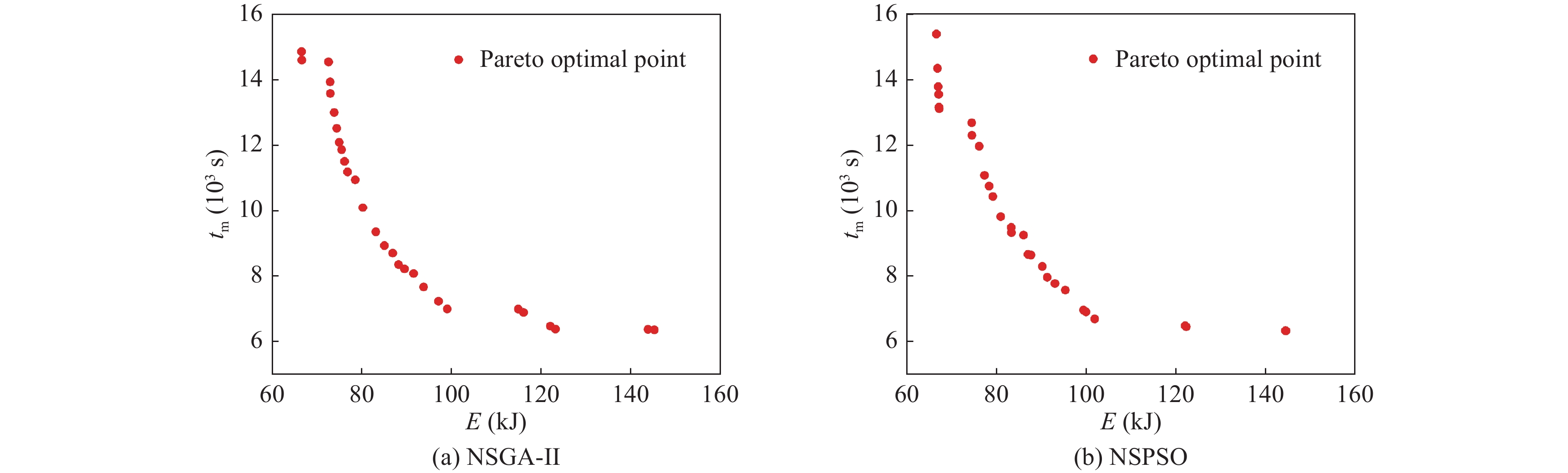
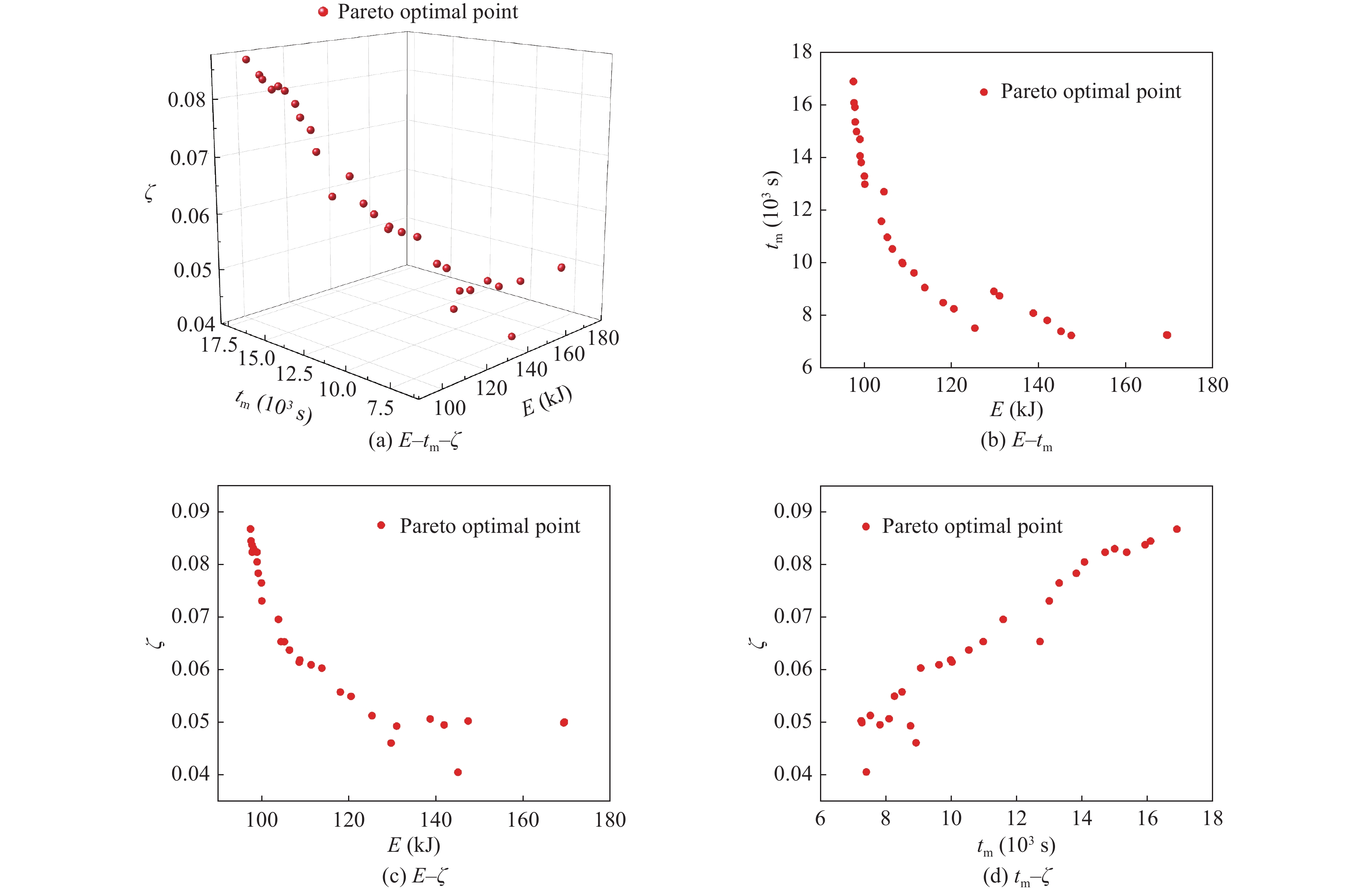
This research examines the optimization of motion strategy and control parameters for an Autonomous Underwater Glider (AUG) navigating between two points. For scenarios with specified initial position, target position, and heading, this study proposes a three-dimensional multimodal path planning methodology based on the 3D-Dubins path, ensuring both task fulfillment and motion feasibility within AUG dynamics constraints. The path planning approach incorporates ocean current interference and utilizes task objectives and control parameters as inputs. It systematically calculates information including horizontal Dubins type, vertical plane motion modes, and turning point depths to generate the path planning solution. The motion control strategy implements initial control parameter values and utilizes depth measurements as evaluation criteria. Through control parameter adjustments, the strategy facilitates tracking of the designated path. This control approach requires minimal feedback information, with computations executable by shore-based facilities, thereby reducing computational and measurement demands on the AUG and enhancing operational reliability. For specified task objectives, multi-objective optimization of control parameters is conducted using the proposed path planning method and motion control strategy, yielding optimized control parameters and corresponding motion control strategies for various operational requirements.
This research examines the optimization of motion strategy and control parameters for an Autonomous Underwater Glider (AUG) navigating between two points. For scenarios with specified initial position, target position, and heading, this study proposes a three-dimensional multimodal path planning methodology based on the 3D-Dubins path, ensuring both task fulfillment and motion feasibility within AUG dynamics constraints. The path planning approach incorporates ocean current interference and utilizes task objectives and control parameters as inputs. It systematically calculates information including horizontal Dubins type, vertical plane motion modes, and turning point depths to generate the path planning solution. The motion control strategy implements initial control parameter values and utilizes depth measurements as evaluation criteria. Through control parameter adjustments, the strategy facilitates tracking of the designated path. This control approach requires minimal feedback information, with computations executable by shore-based facilities, thereby reducing computational and measurement demands on the AUG and enhancing operational reliability. For specified task objectives, multi-objective optimization of control parameters is conducted using the proposed path planning method and motion control strategy, yielding optimized control parameters and corresponding motion control strategies for various operational requirements.
2026, 40(3)
:619-633.
doi: 10.1007/s13344-026-0047-8
Abstract:
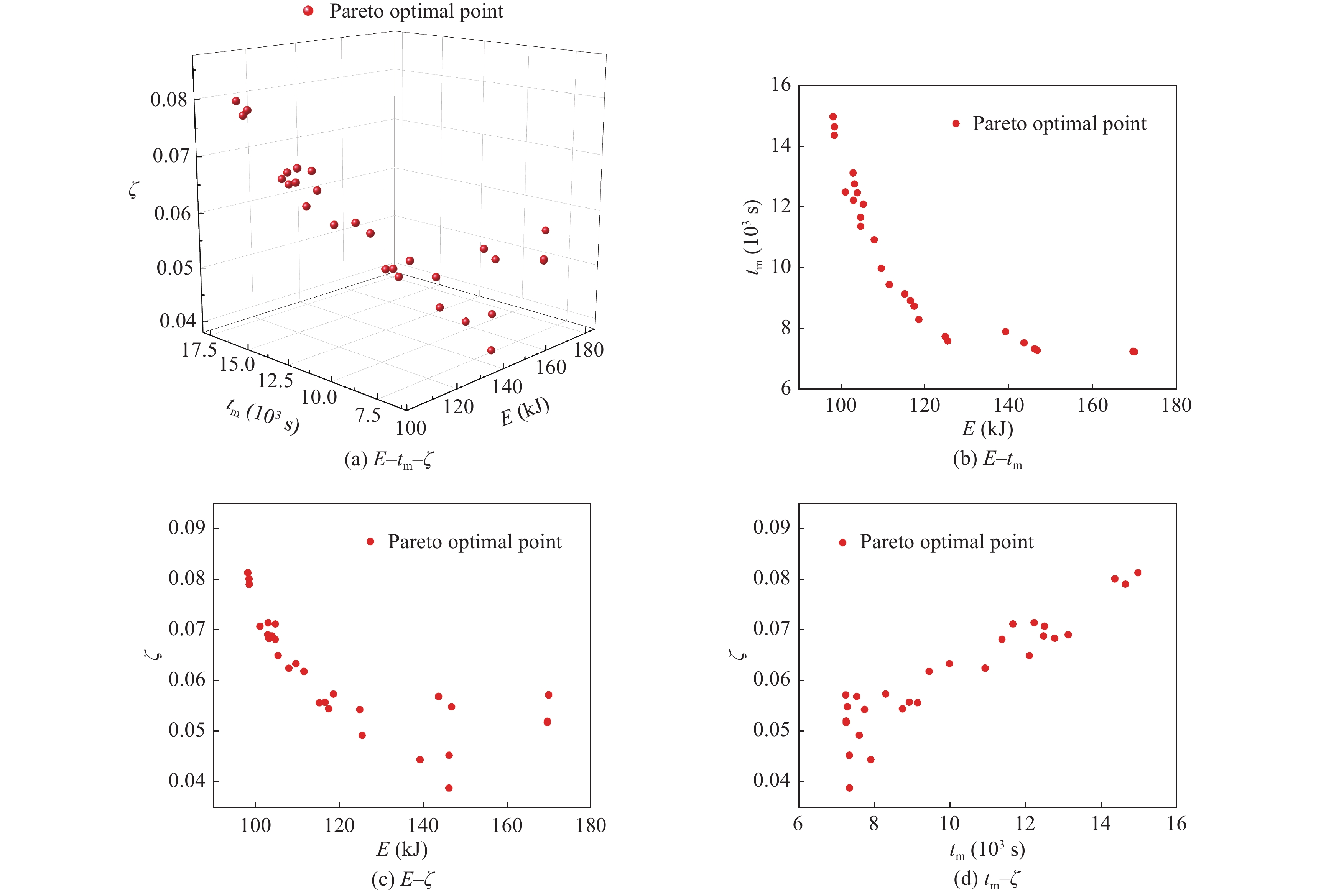
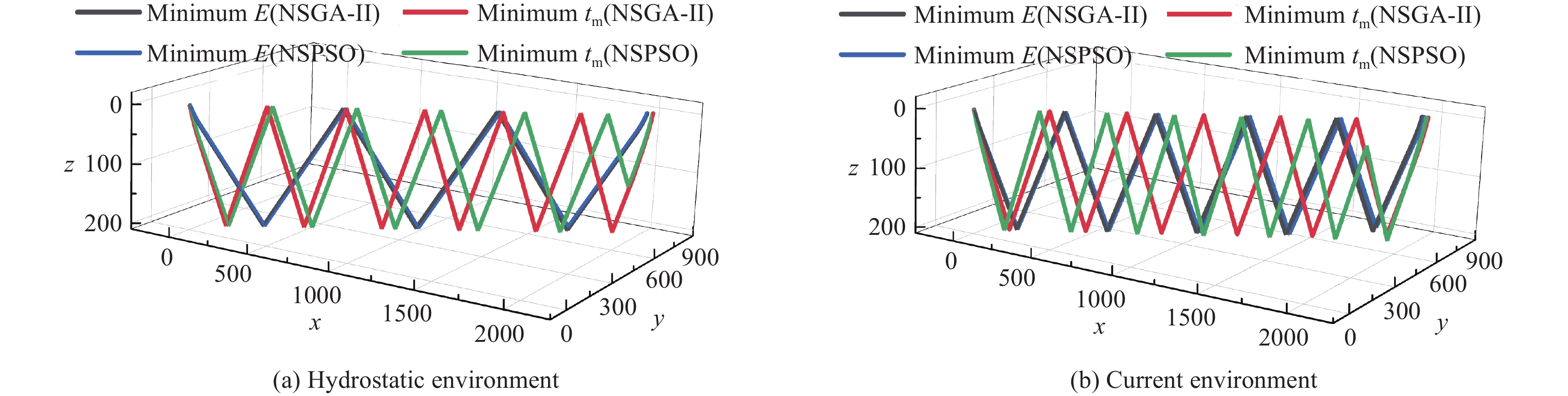
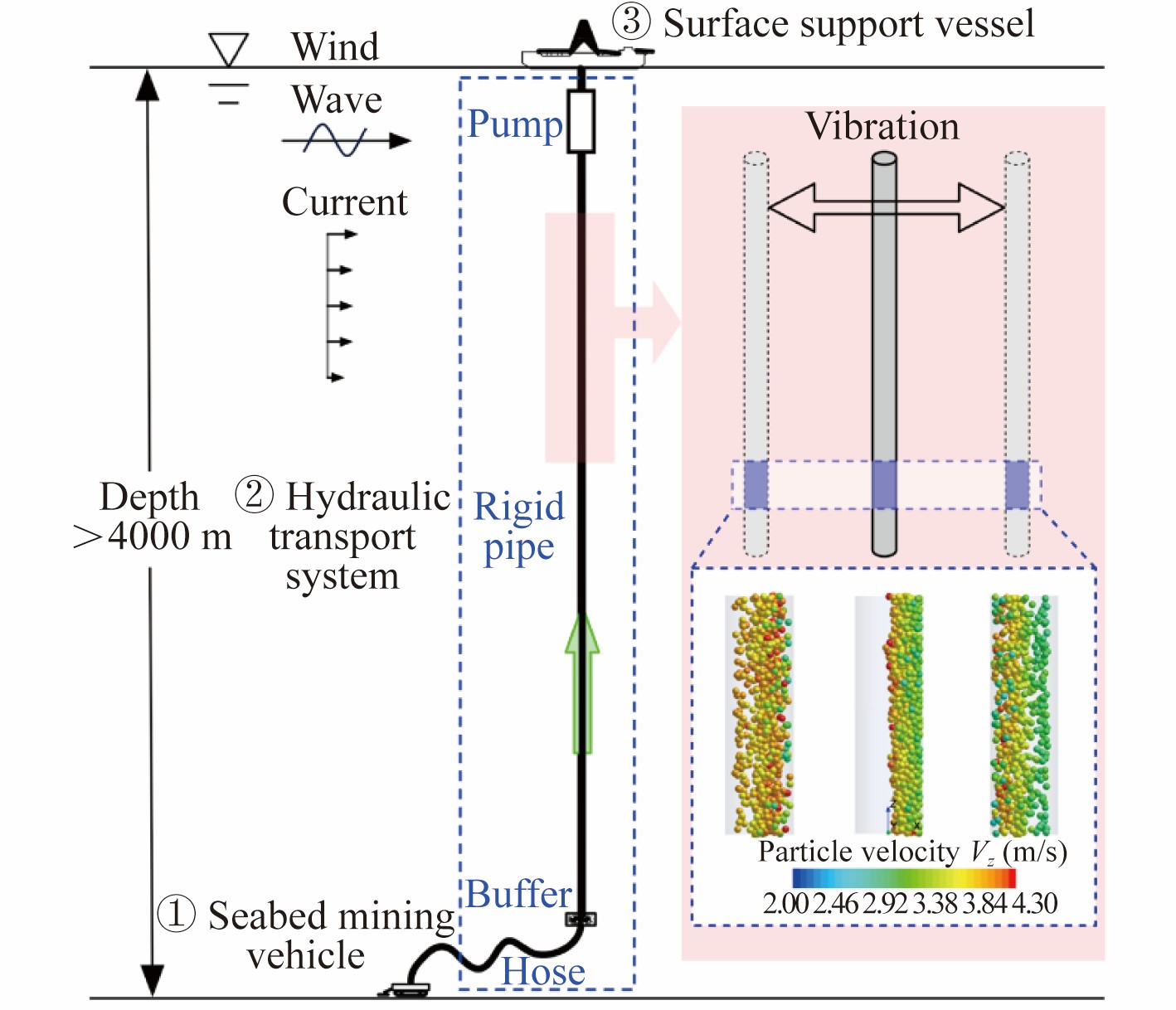
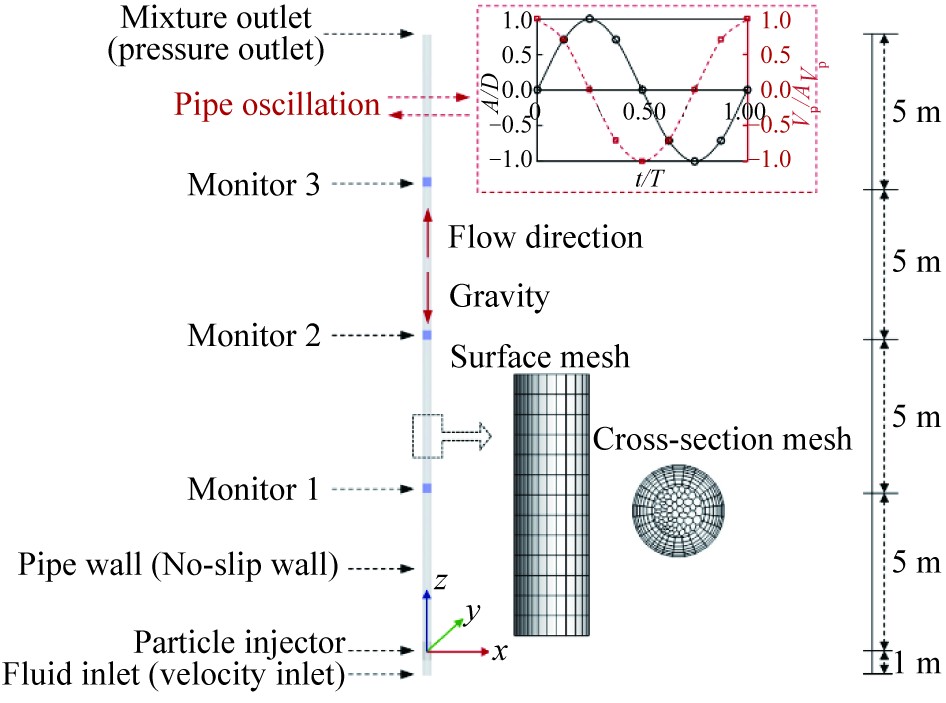
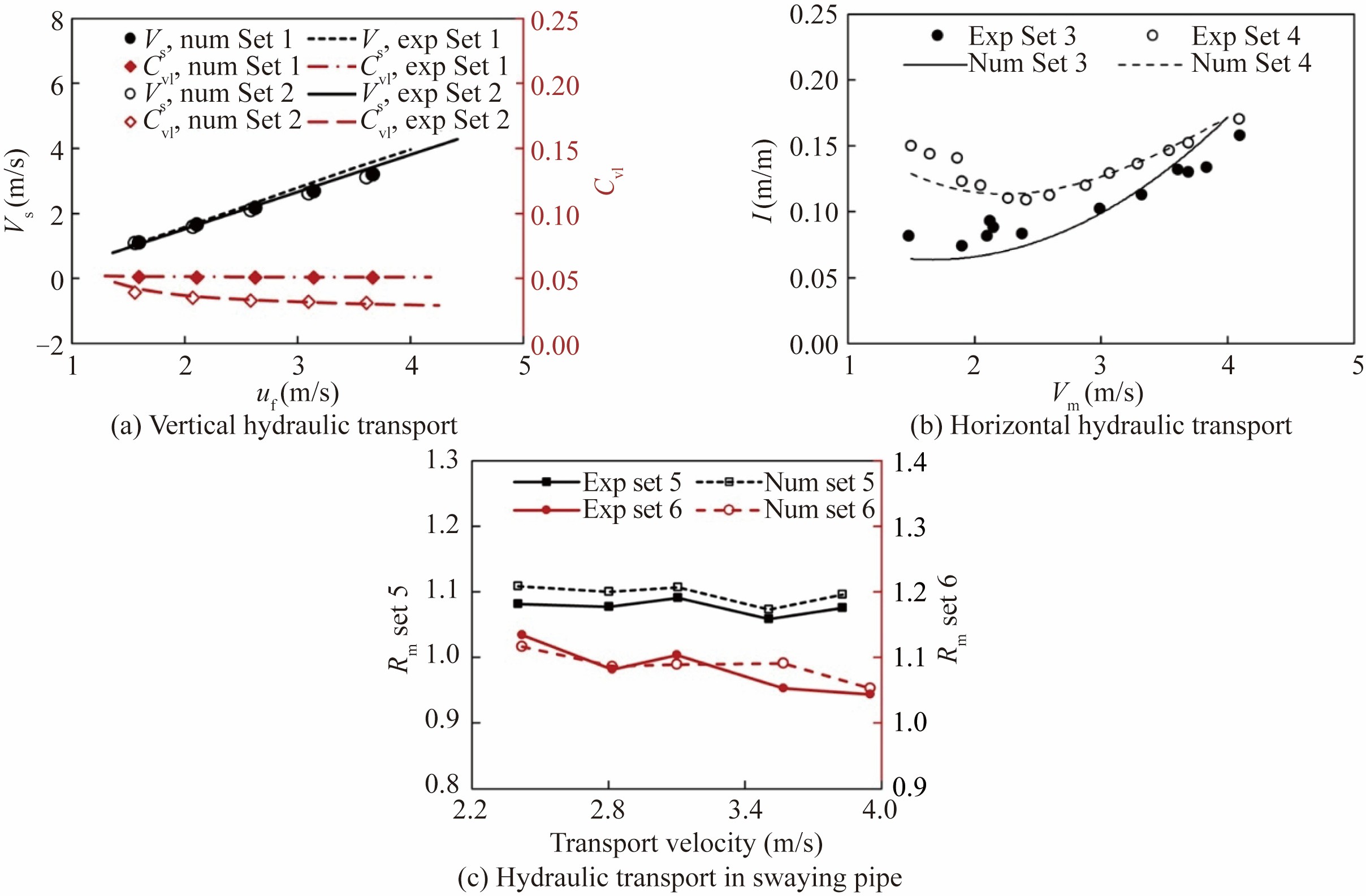
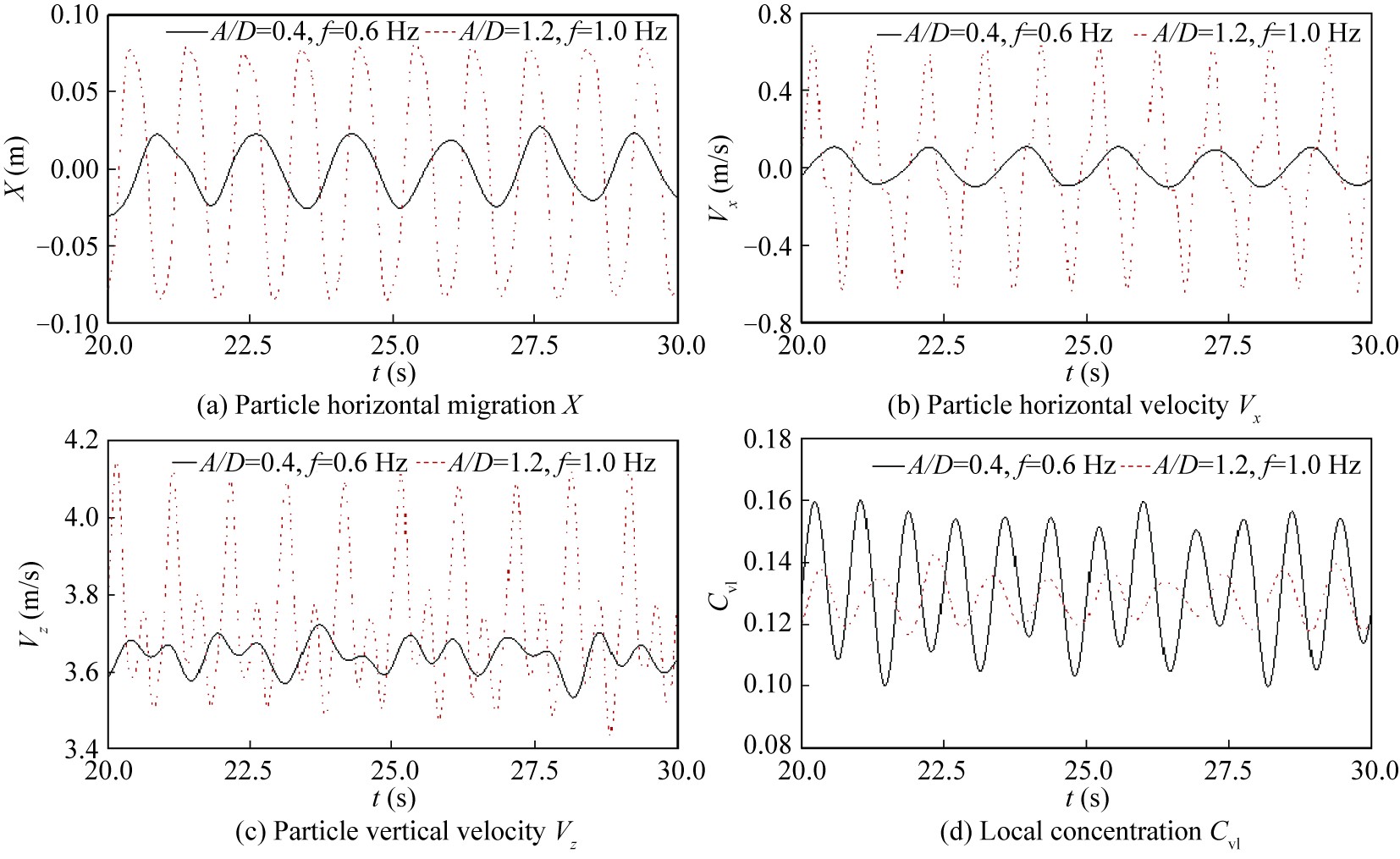
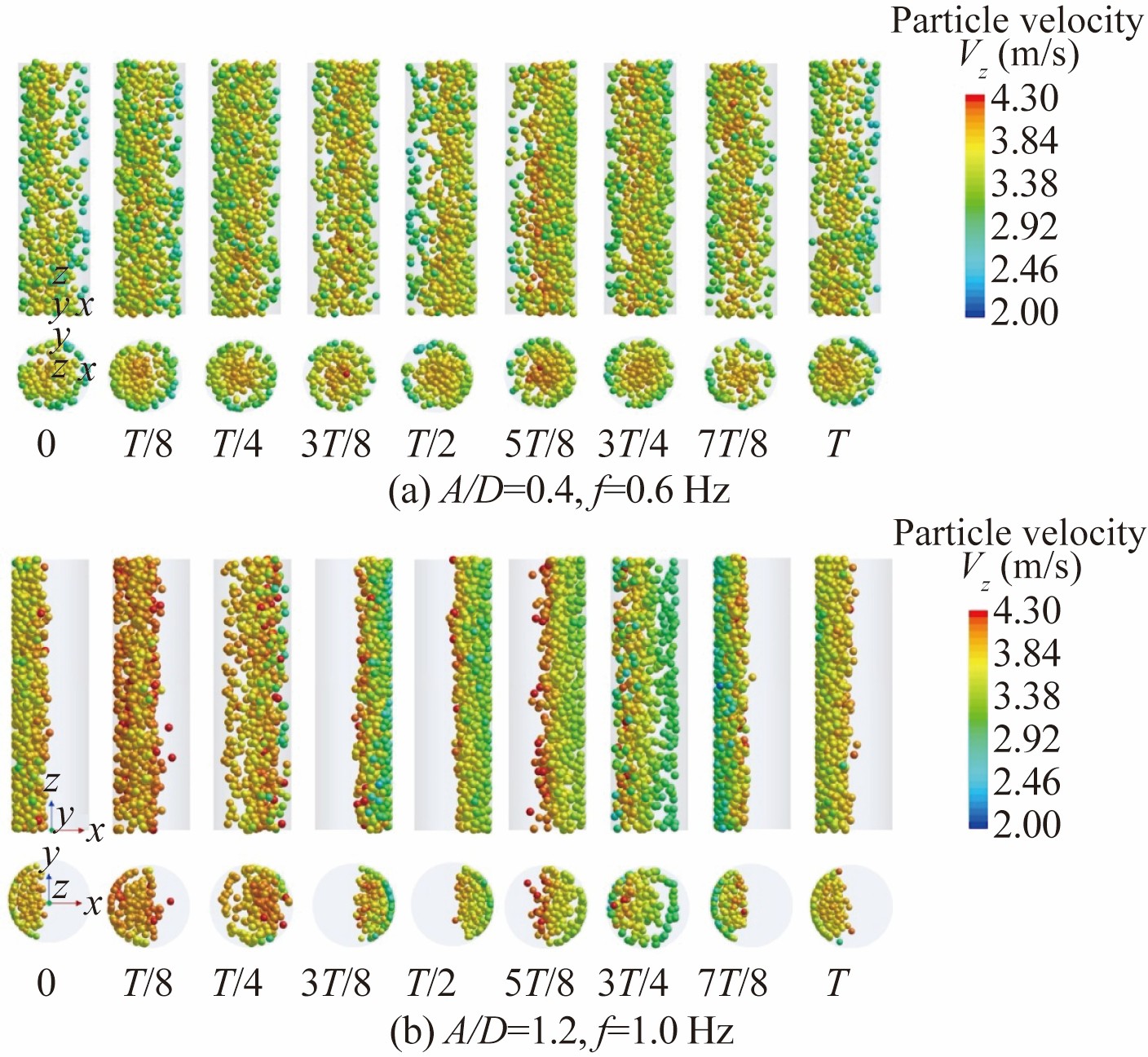
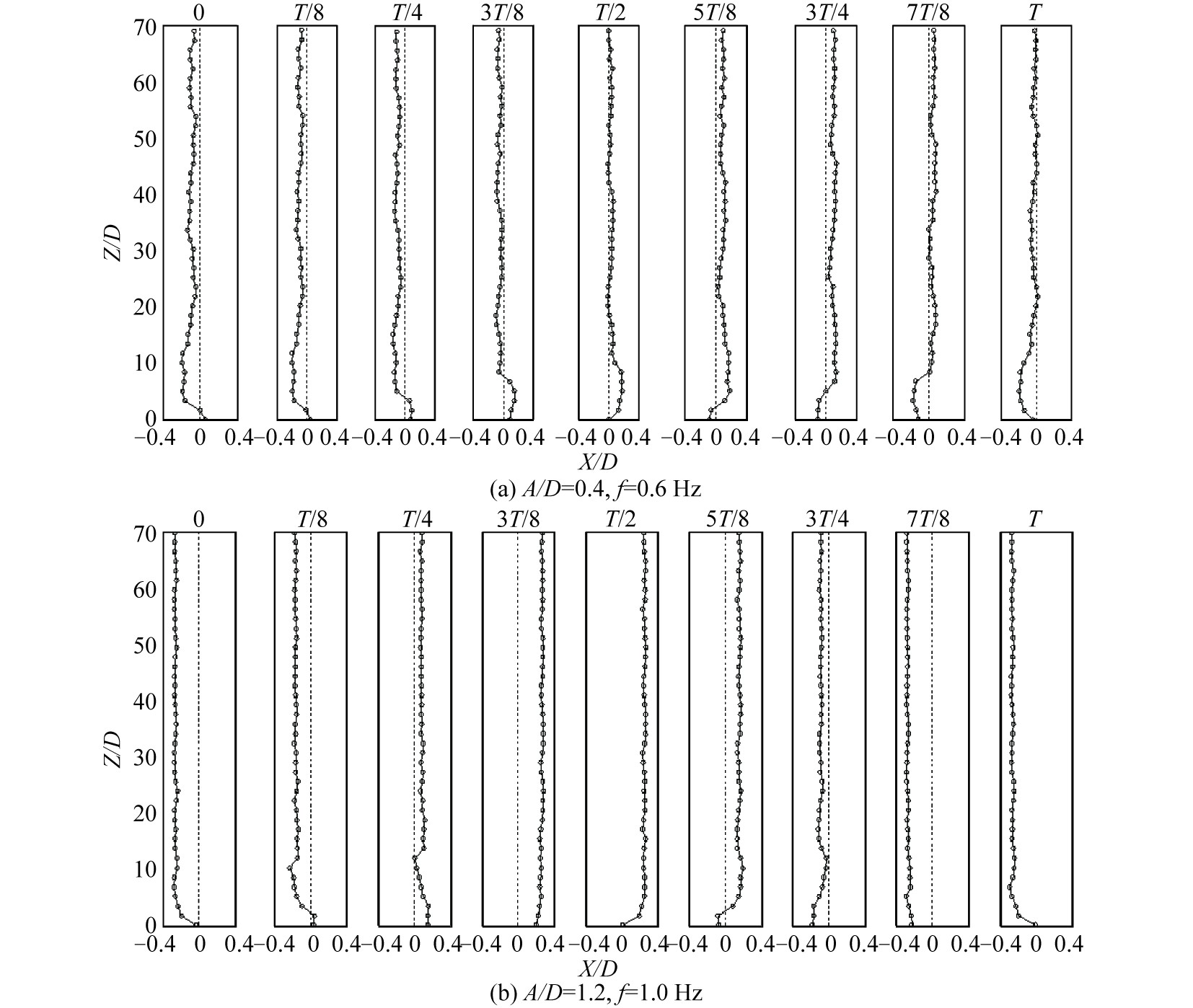
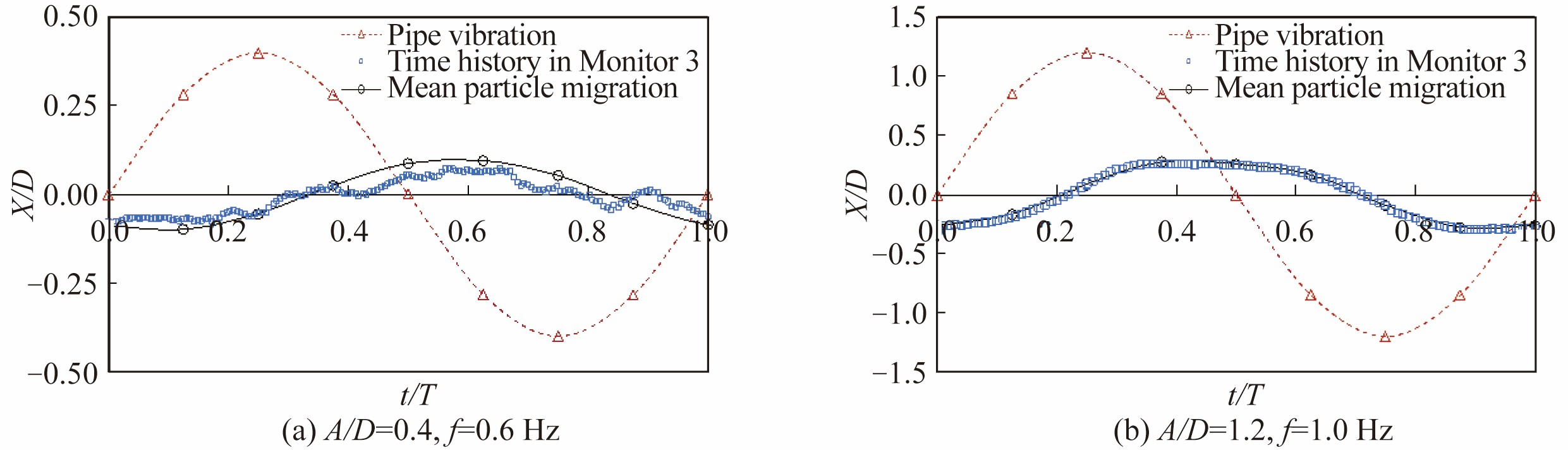
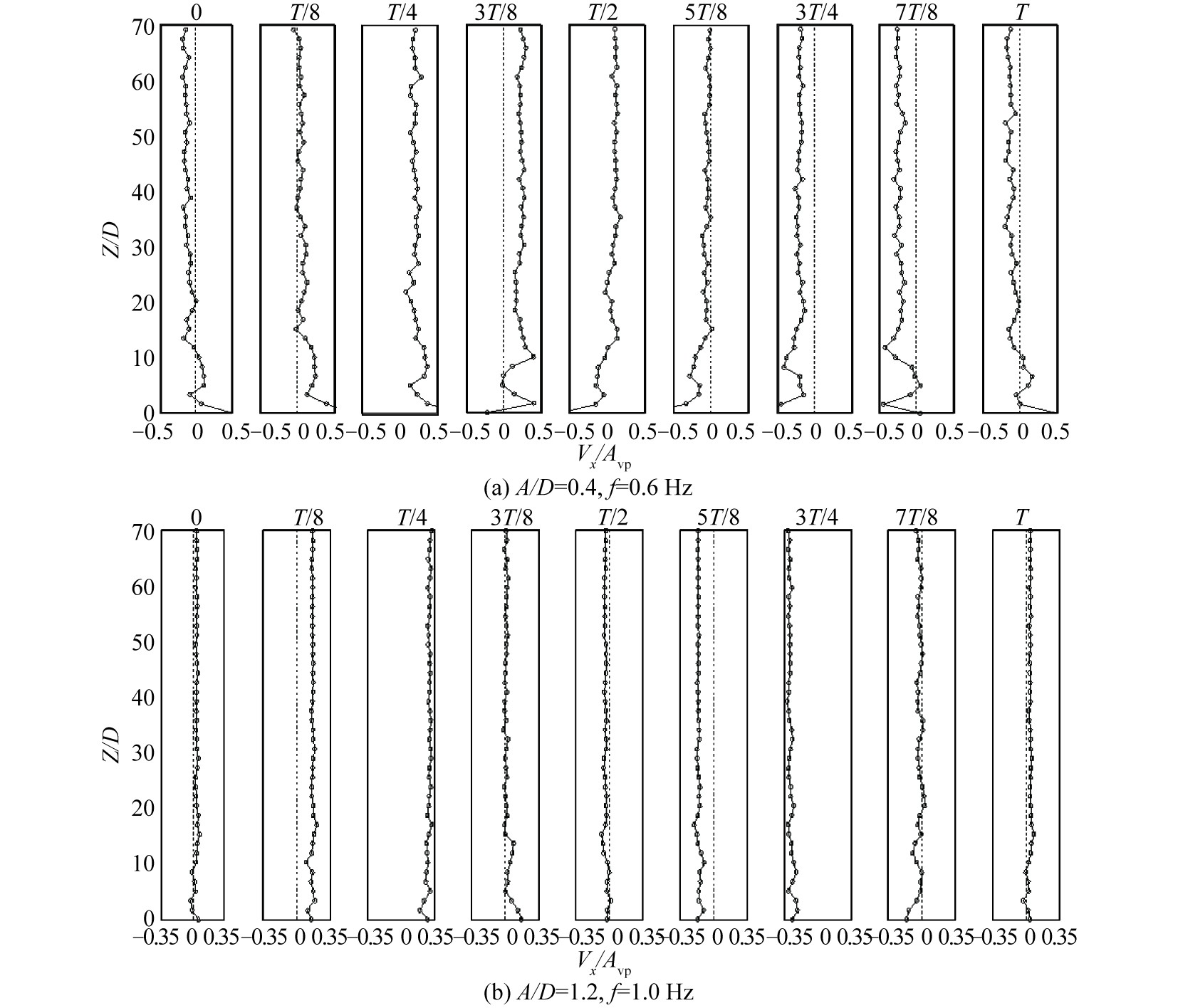
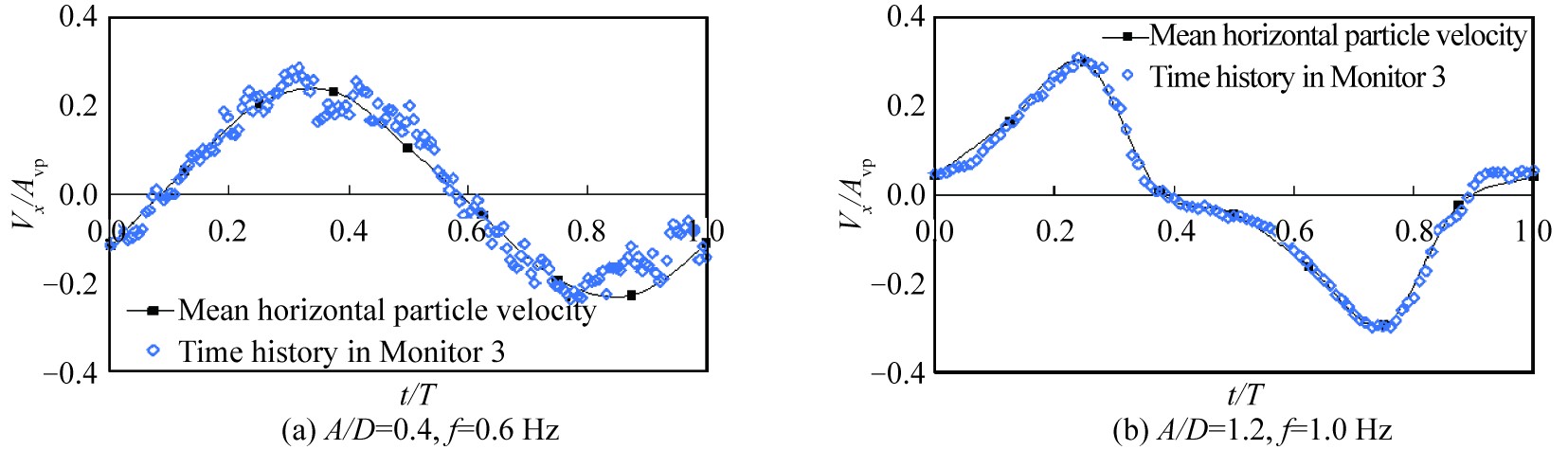
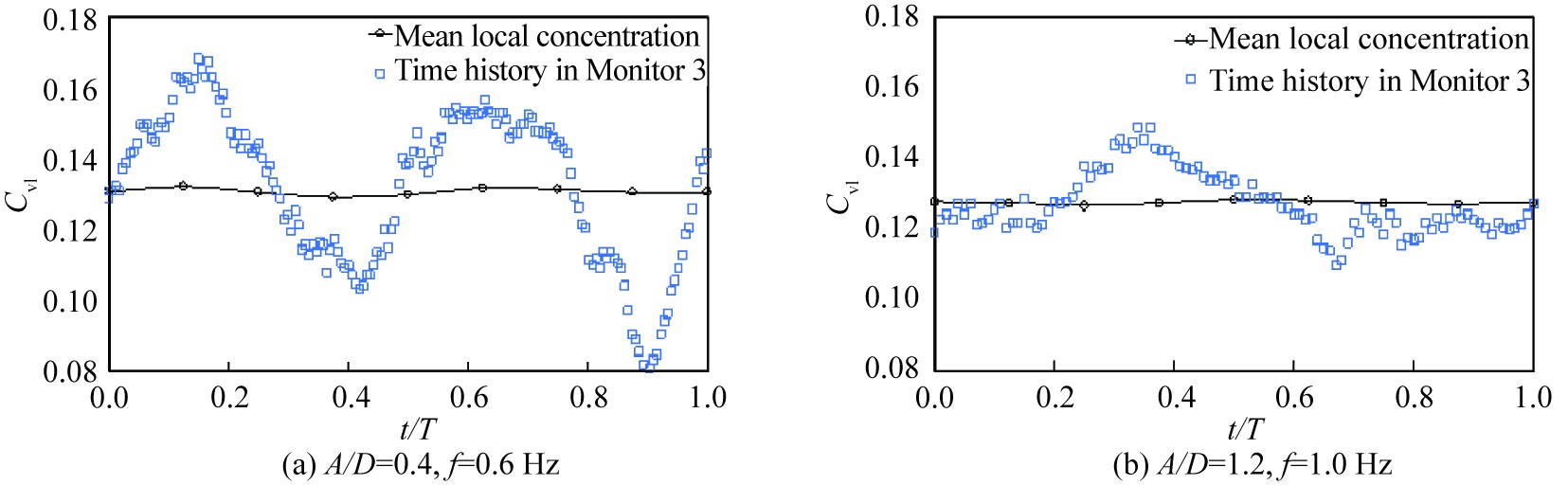
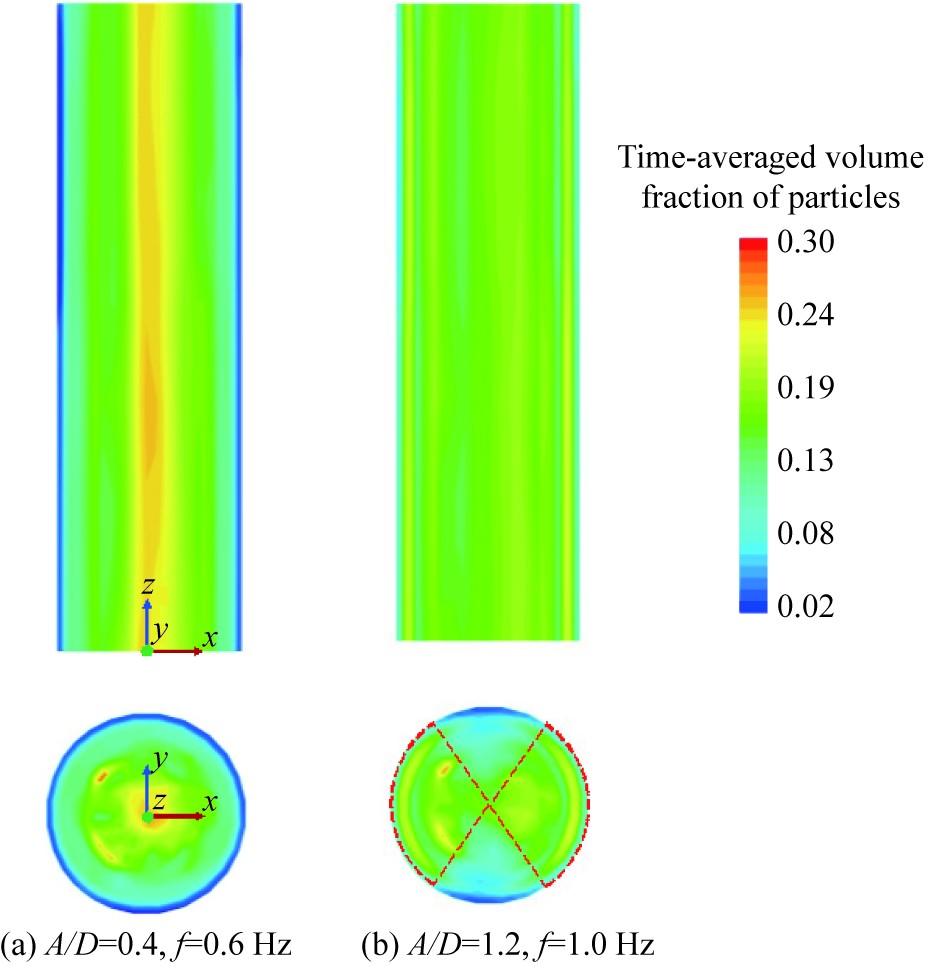
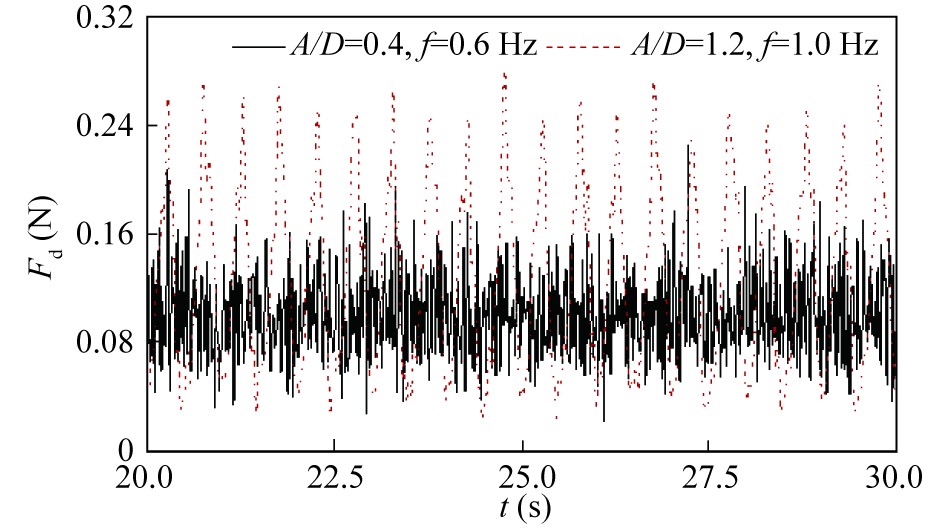
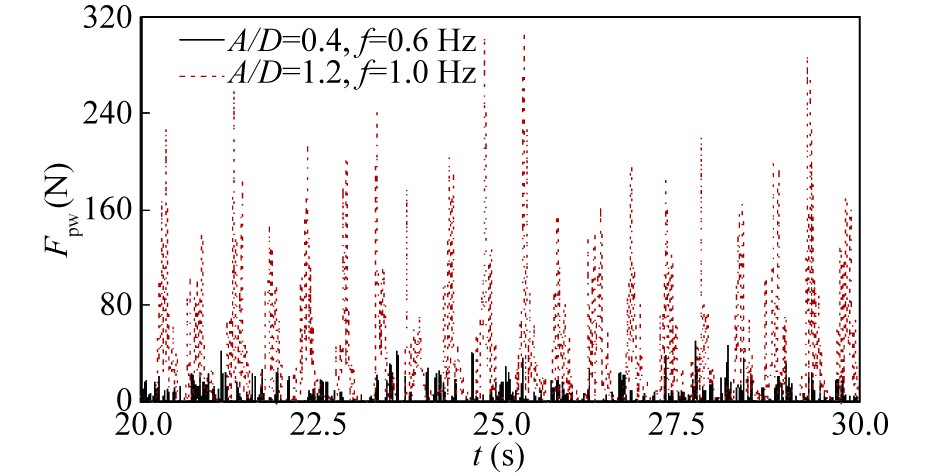
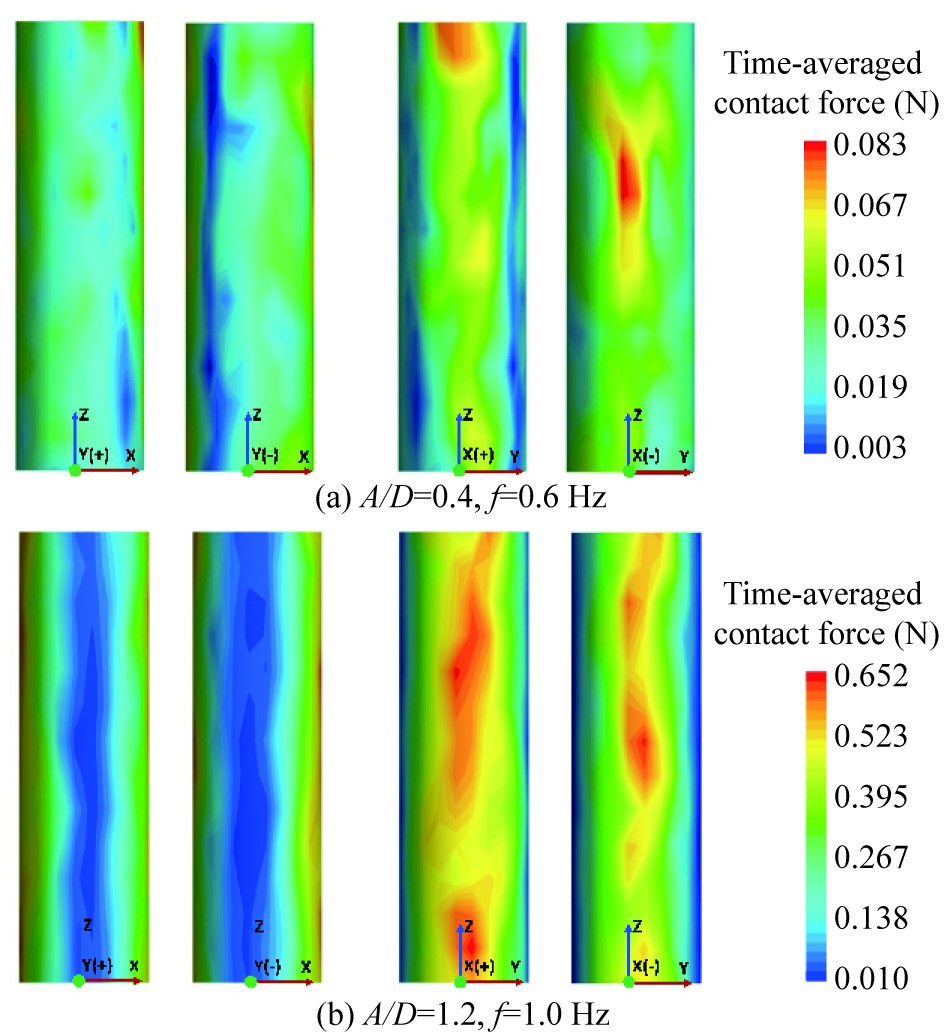
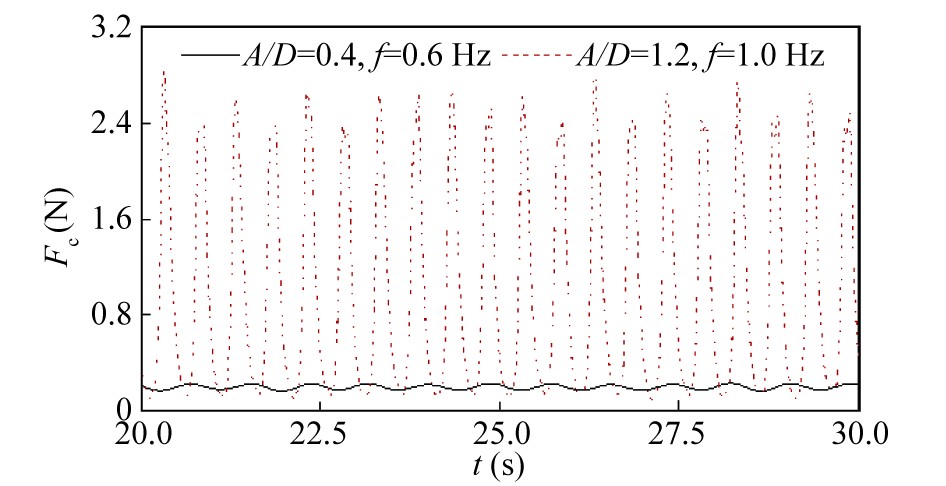
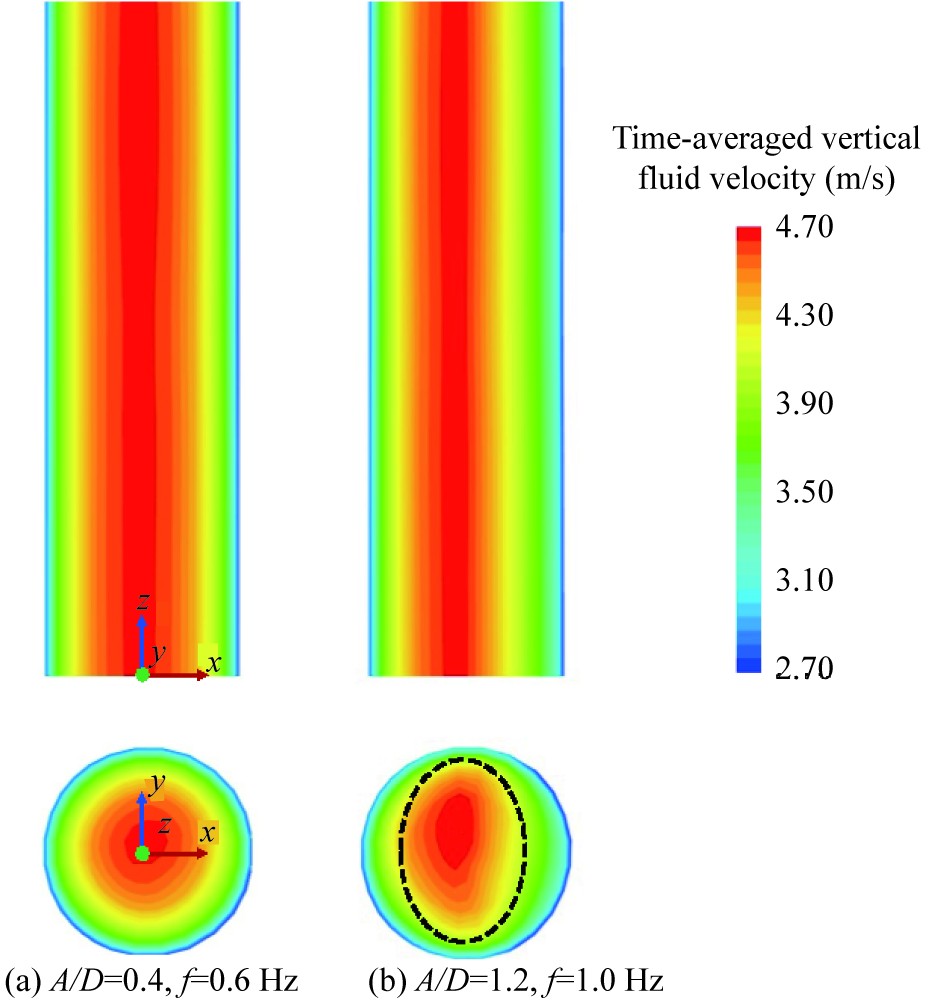
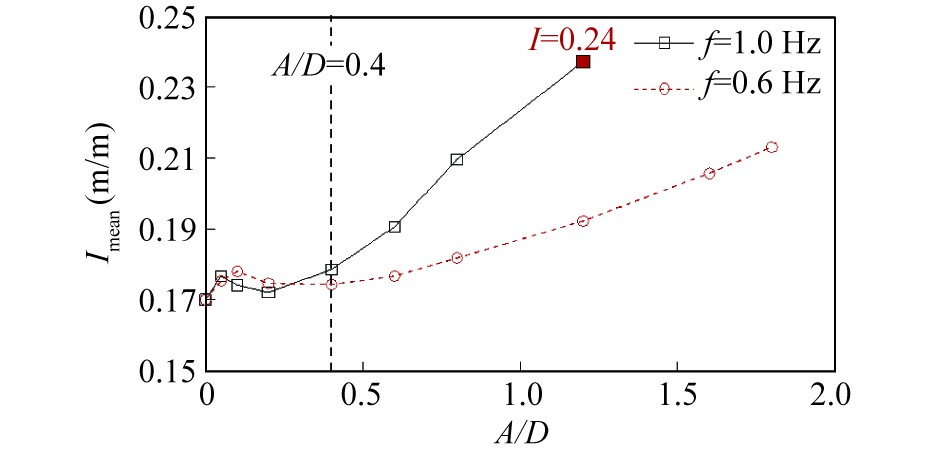
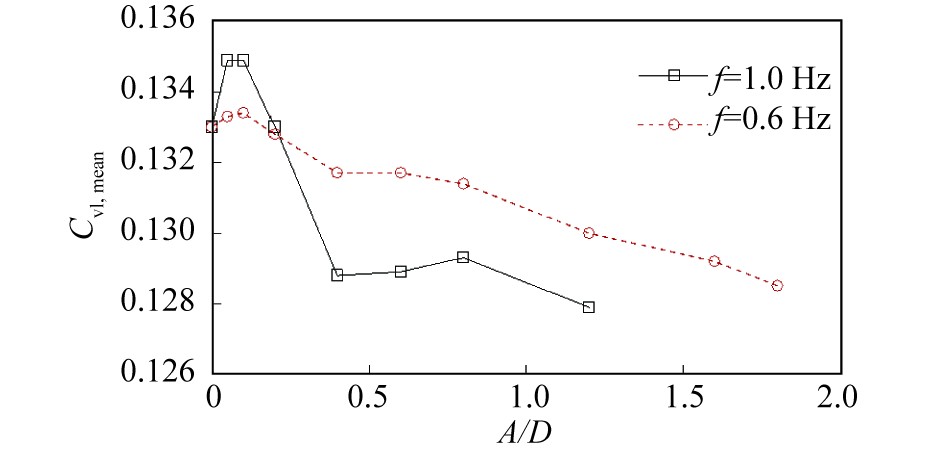
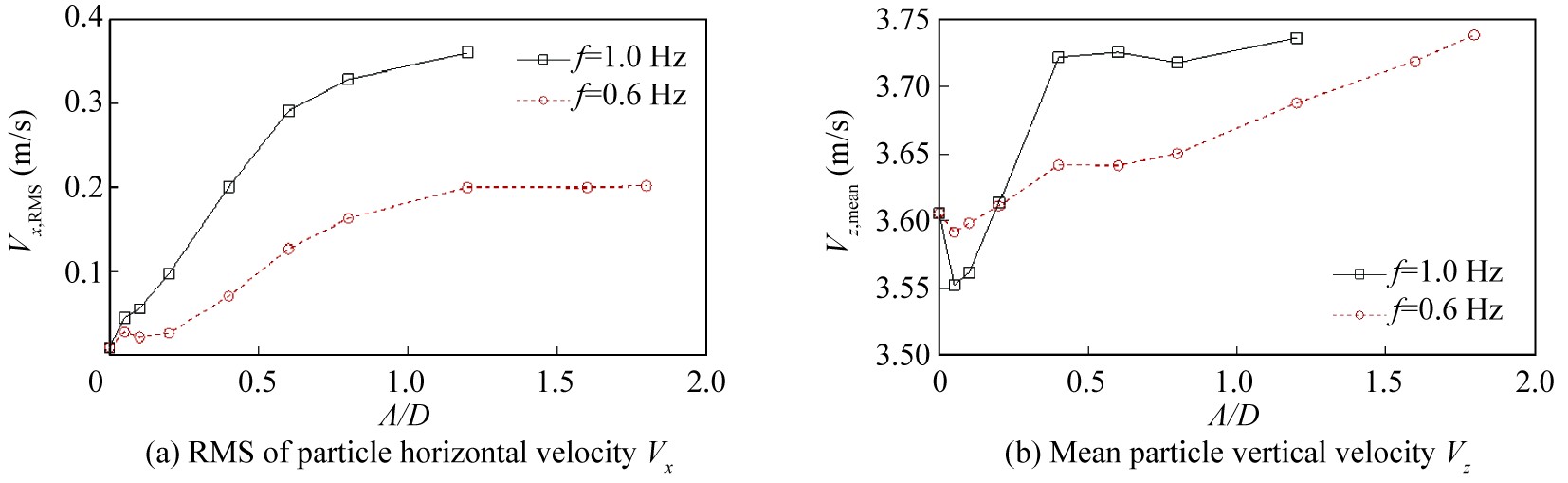
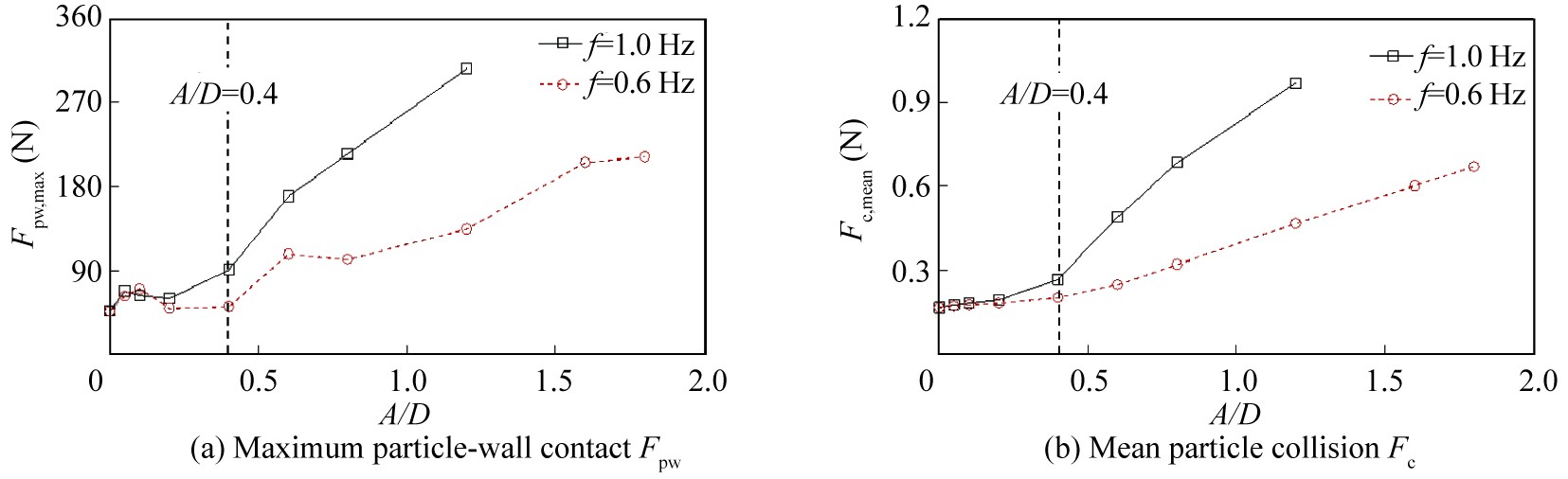
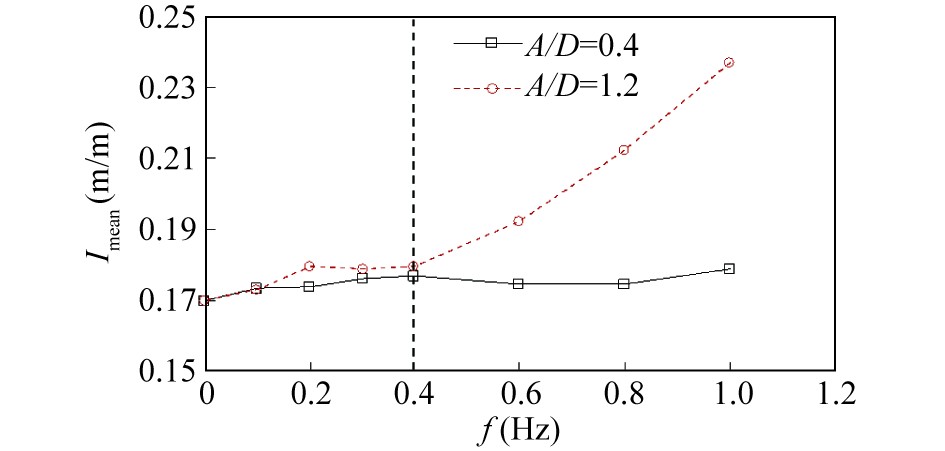
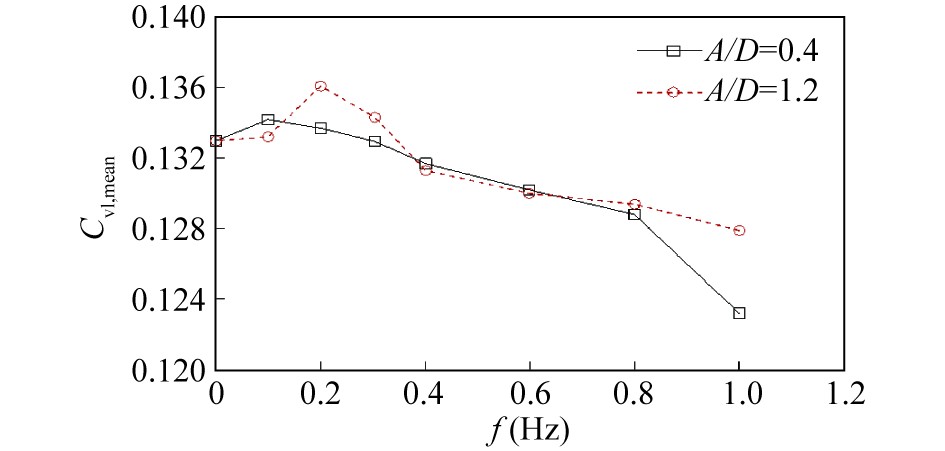
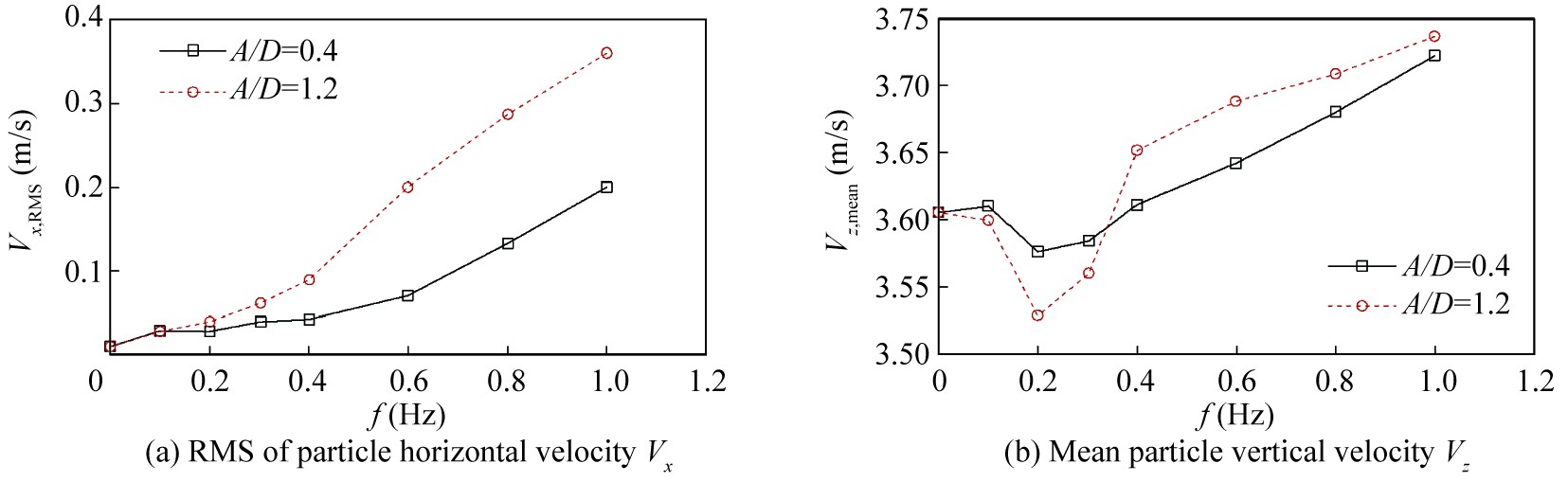
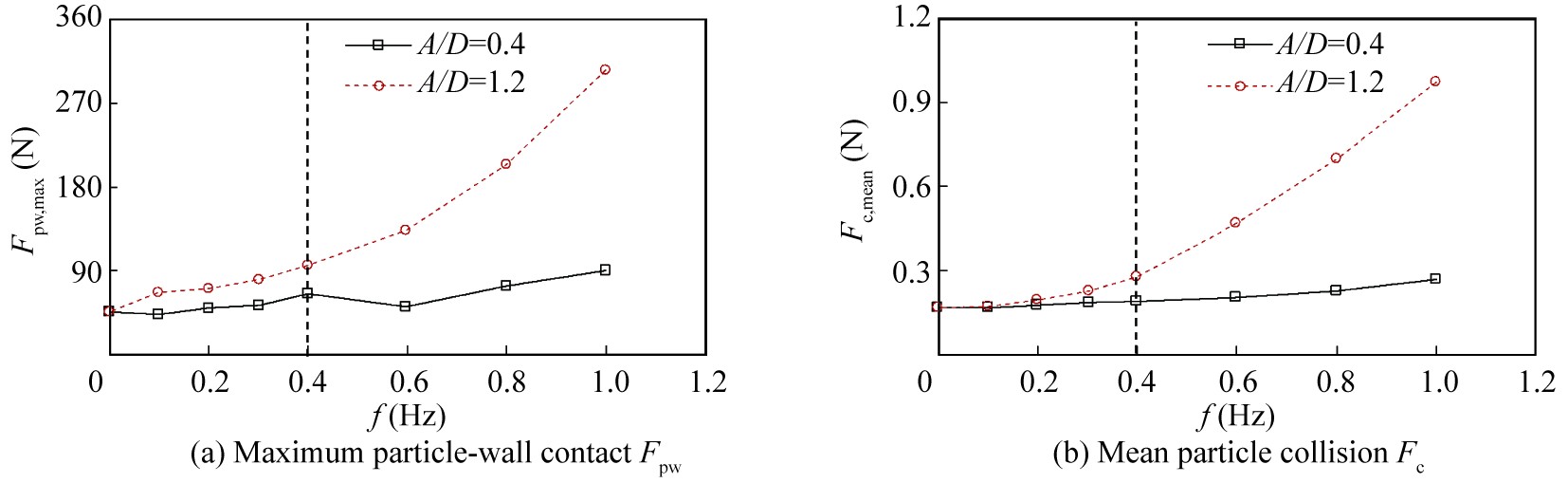
Deep-sea mining facilitates the extraction of valuable metal elements from the seabed for industrial development. However, the efficient transport of minerals to the sea surface presents significant challenges. This study utilizes Computational Fluid Dynamics and Discrete Element Method (CFD-DEM) to examine particle dynamics within vibrating pipelines during hydraulic transport in deep-sea mining. The analysis focuses on particle behavior over one vibration cycle, incorporating sensitivity analyses of vibration frequency and amplitude effects. Results demonstrate that particles undergo periodic horizontal migration synchronized with pipe vibration frequency. Particle accumulation is observed near the vibration equilibrium position but diminishes at maximum positions. While mild to moderate pipe vibrations minimally affect particle dynamics, high amplitude and frequency combinations result in substantial particle accumulation near the pipe wall, leading to increased particle collisions and hydraulic gradient elevation up to 40%. For optimal safety and efficiency in hydraulic transport operations, pipe vibration amplitude should not exceed 0.4 times the pipe diameter, with frequency maintained below 0.6 Hz in deep-sea mining applications.
Deep-sea mining facilitates the extraction of valuable metal elements from the seabed for industrial development. However, the efficient transport of minerals to the sea surface presents significant challenges. This study utilizes Computational Fluid Dynamics and Discrete Element Method (CFD-DEM) to examine particle dynamics within vibrating pipelines during hydraulic transport in deep-sea mining. The analysis focuses on particle behavior over one vibration cycle, incorporating sensitivity analyses of vibration frequency and amplitude effects. Results demonstrate that particles undergo periodic horizontal migration synchronized with pipe vibration frequency. Particle accumulation is observed near the vibration equilibrium position but diminishes at maximum positions. While mild to moderate pipe vibrations minimally affect particle dynamics, high amplitude and frequency combinations result in substantial particle accumulation near the pipe wall, leading to increased particle collisions and hydraulic gradient elevation up to 40%. For optimal safety and efficiency in hydraulic transport operations, pipe vibration amplitude should not exceed 0.4 times the pipe diameter, with frequency maintained below 0.6 Hz in deep-sea mining applications.
2026, 40(3)
:634-643.
doi: 10.1007/s13344-026-0048-7
Abstract:
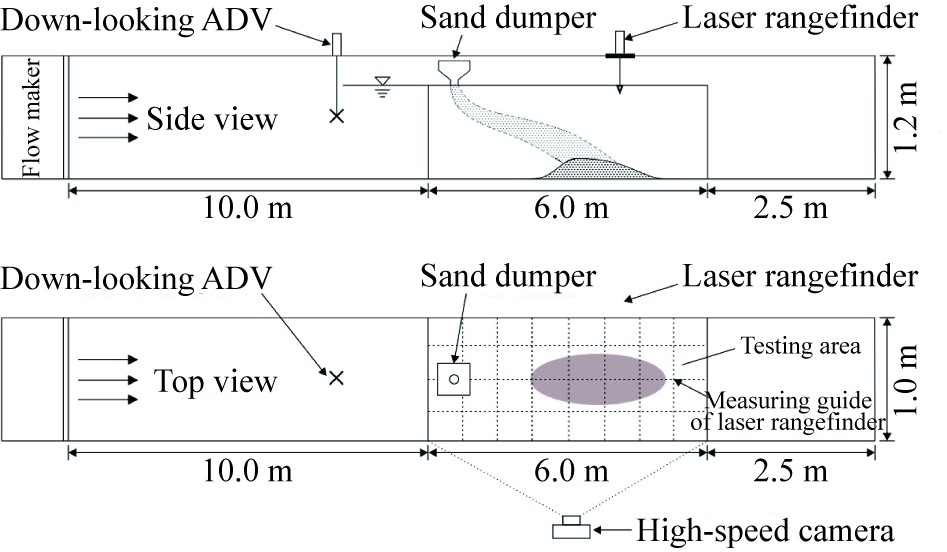
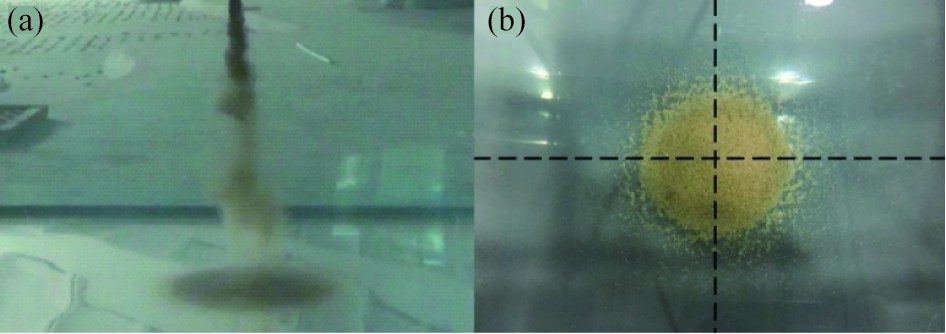
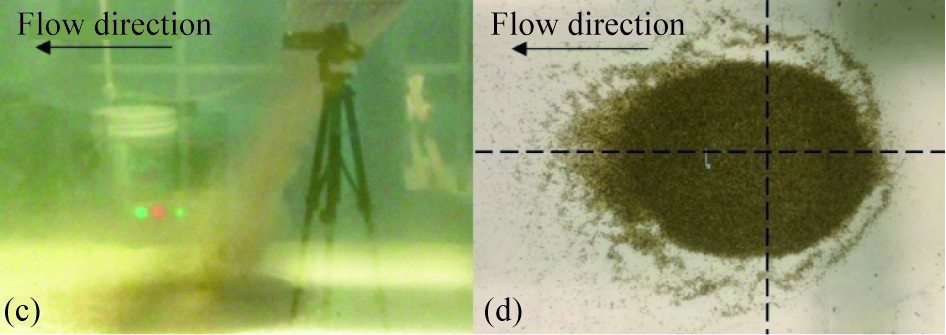
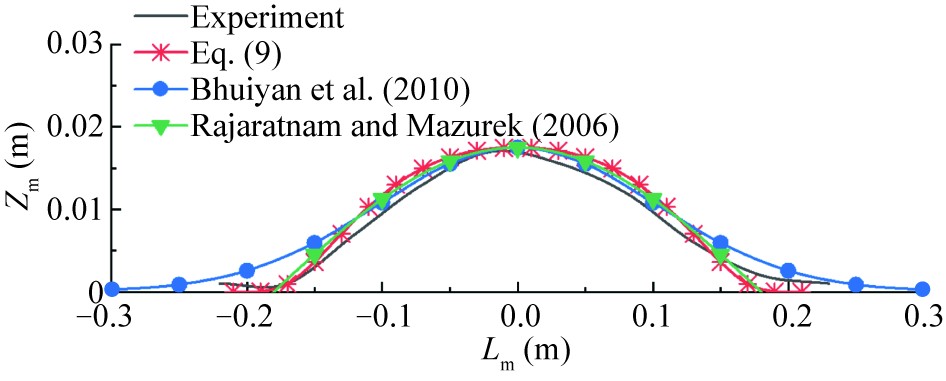
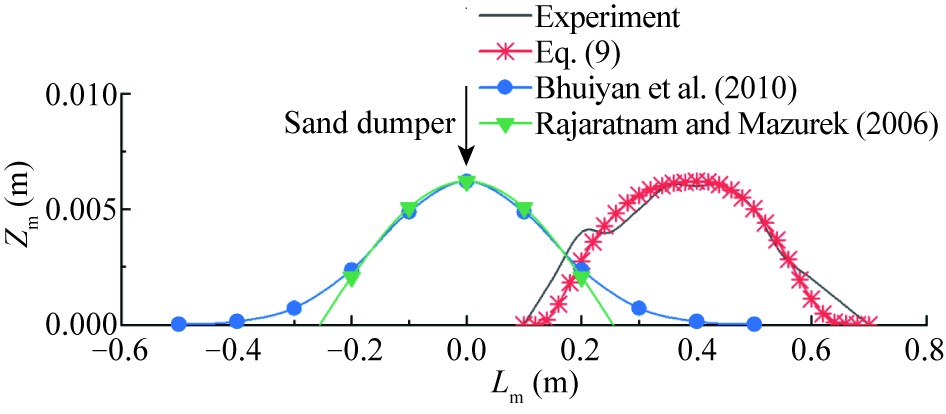
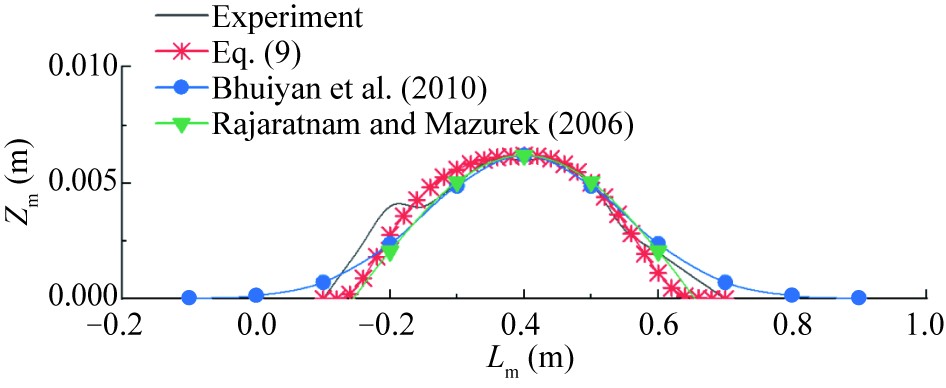
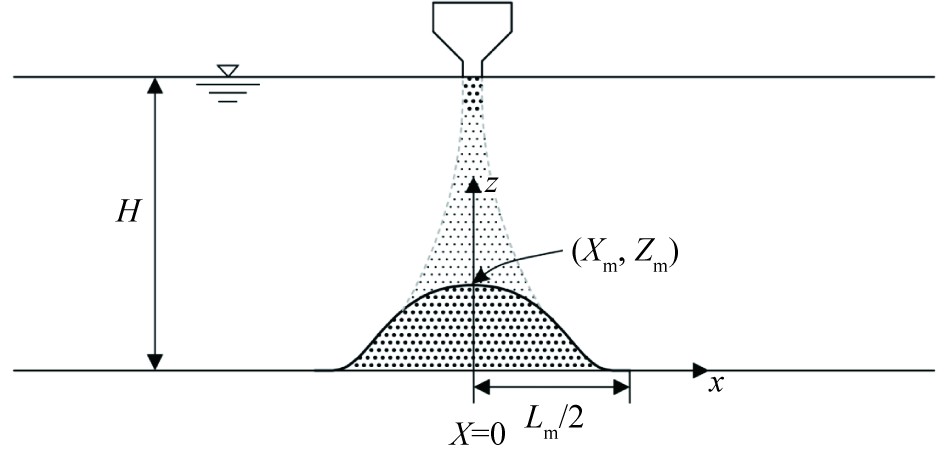
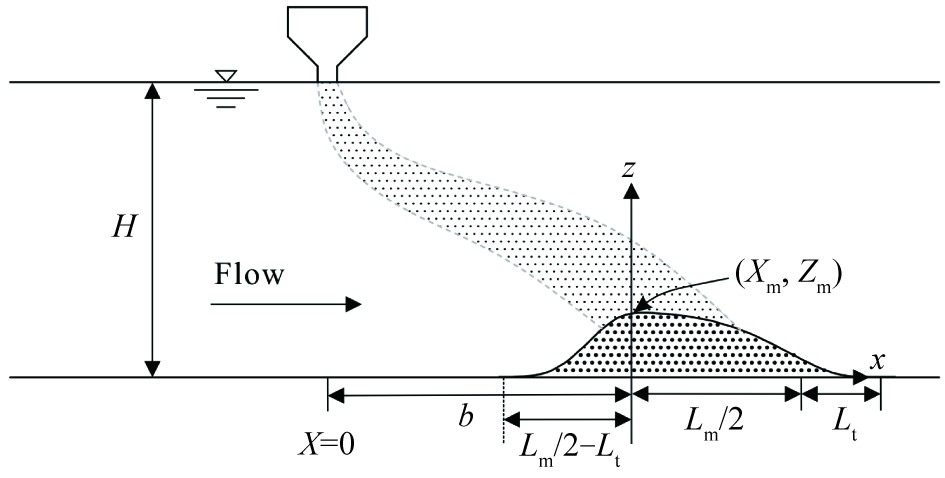
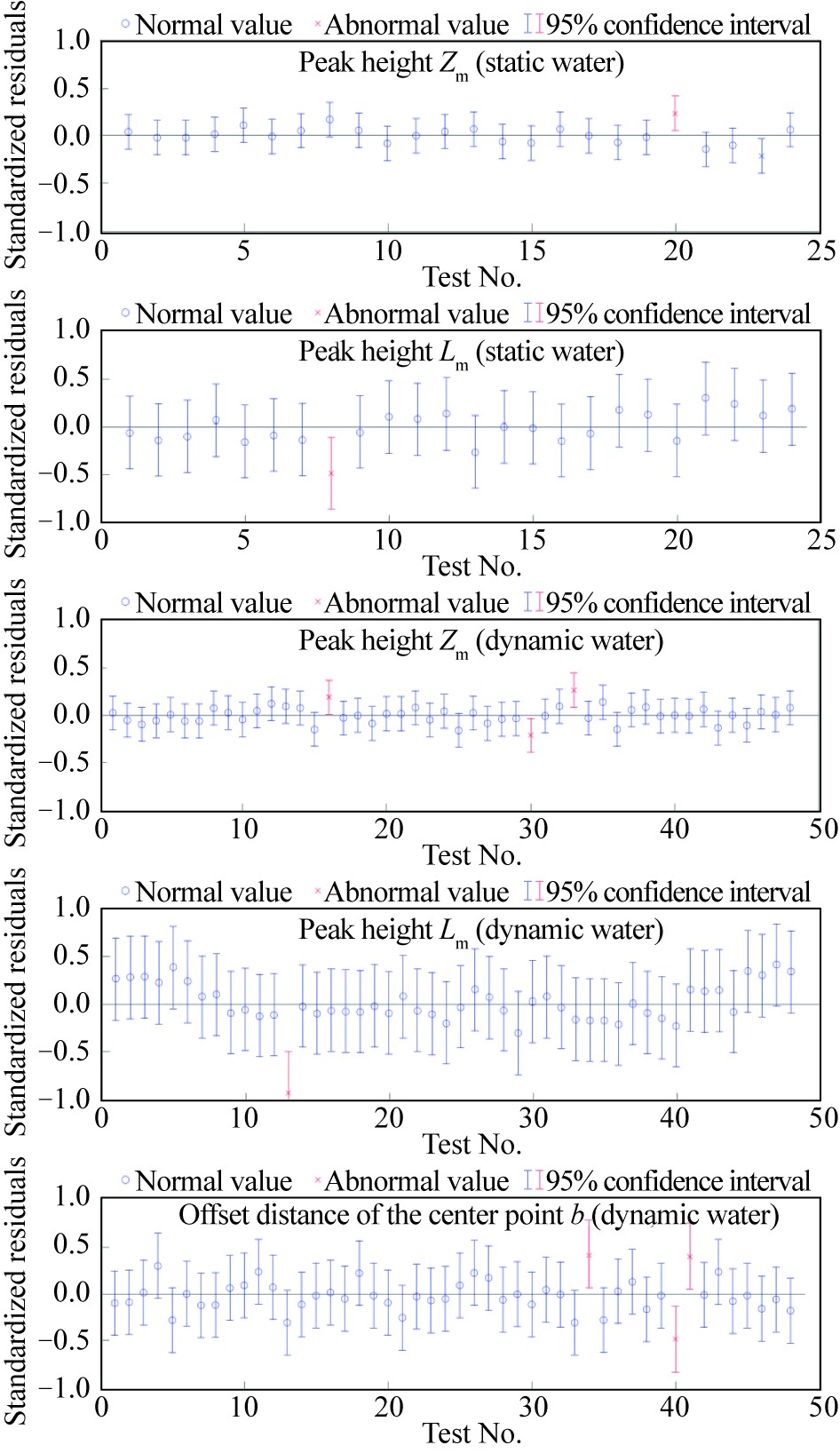
Dredging is a critical approach for estuary improvement and development and remains one of the most practical solutions to sedimentation problems. Dredged sediments are typically transported by suction hopper dredgers and disposed of at designated offshore dumping sites. Accurate prediction of the formation and evolution of subaqueous sediment mounds is therefore essential for minimizing the ecological and environmental impacts associated with secondary sediment transport. This study conducts a series of experimental tests examining the morphology and classification of sediment subaqueous mounds formed through continuous release of coarse sediment under static and dynamic flow conditions. Observations indicate that mounds can be classified as regular cones or oblique elliptic cones under hydrodynamic forces. Based on diffusion theory, this research develops a theoretical model describing the subaqueous mound formation process. Four key characteristic parameters are identified to characterize mound shape: peak height, radiation length, peak offset distance, and turbulence-induced diffusion length. These parameters are expressed as functions of dimensionless numbers: sand Reynolds number, flow Reynolds number, density Froude number, and characteristic length. The findings demonstrate that the process model incorporating peak offset distance and diffusion length more accurately predicts drift characteristics and skew distribution of sediment subaqueous mounds.
Dredging is a critical approach for estuary improvement and development and remains one of the most practical solutions to sedimentation problems. Dredged sediments are typically transported by suction hopper dredgers and disposed of at designated offshore dumping sites. Accurate prediction of the formation and evolution of subaqueous sediment mounds is therefore essential for minimizing the ecological and environmental impacts associated with secondary sediment transport. This study conducts a series of experimental tests examining the morphology and classification of sediment subaqueous mounds formed through continuous release of coarse sediment under static and dynamic flow conditions. Observations indicate that mounds can be classified as regular cones or oblique elliptic cones under hydrodynamic forces. Based on diffusion theory, this research develops a theoretical model describing the subaqueous mound formation process. Four key characteristic parameters are identified to characterize mound shape: peak height, radiation length, peak offset distance, and turbulence-induced diffusion length. These parameters are expressed as functions of dimensionless numbers: sand Reynolds number, flow Reynolds number, density Froude number, and characteristic length. The findings demonstrate that the process model incorporating peak offset distance and diffusion length more accurately predicts drift characteristics and skew distribution of sediment subaqueous mounds.
2026, 40(3)
:644-655.
doi: 10.1007/s13344-026-0049-6
Abstract:
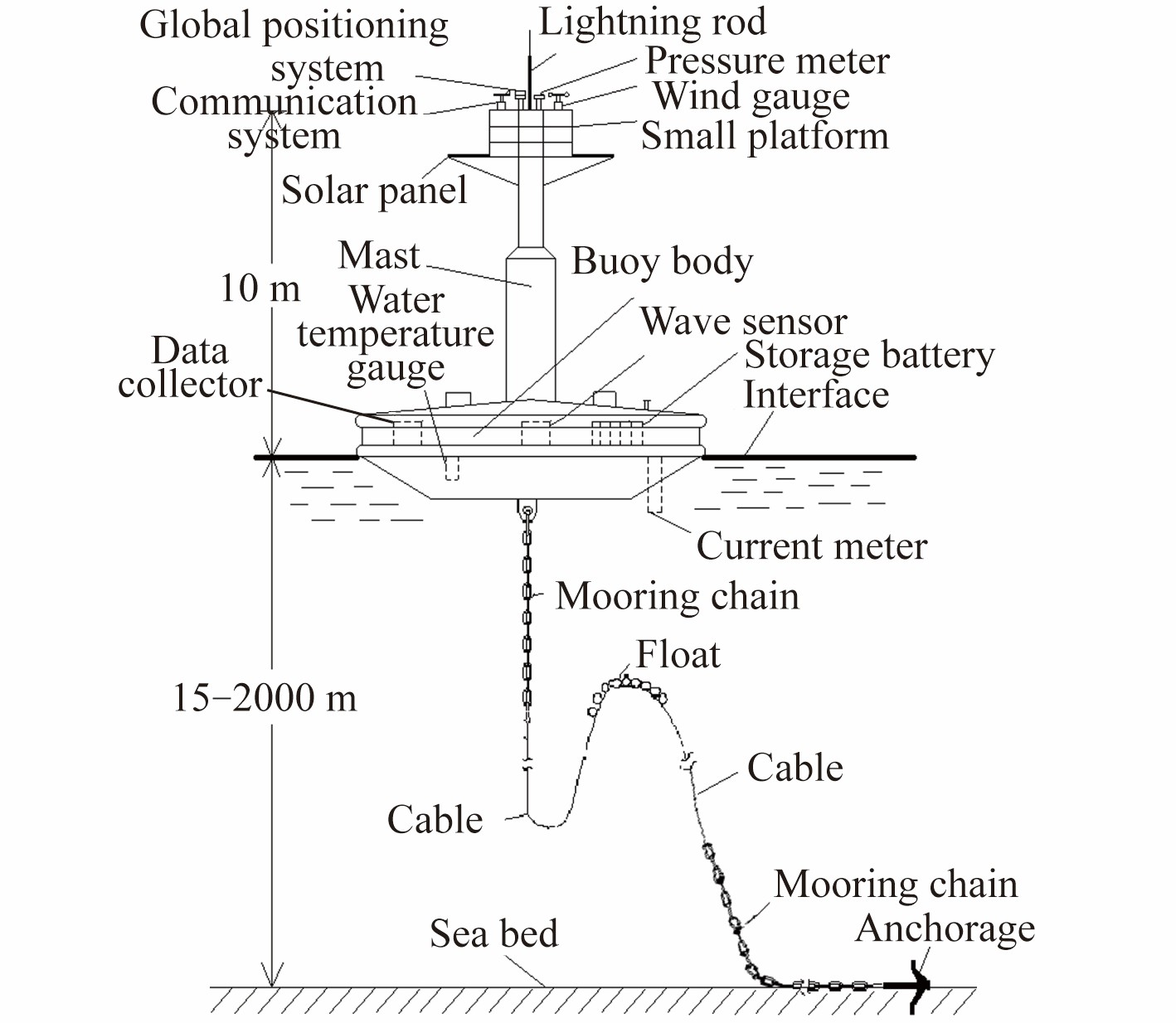
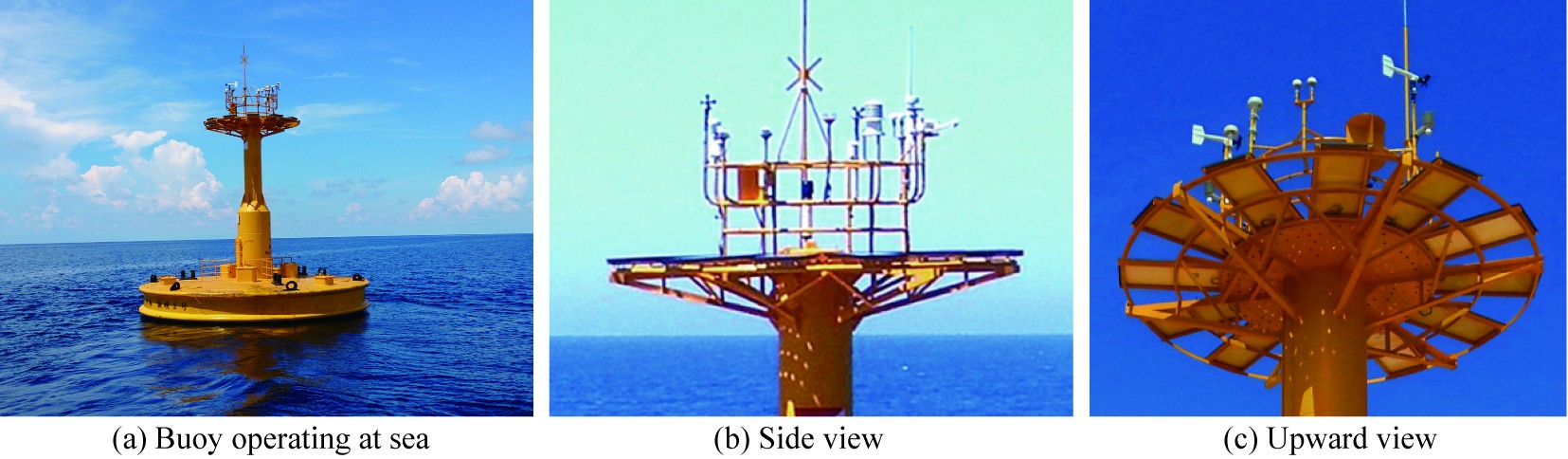
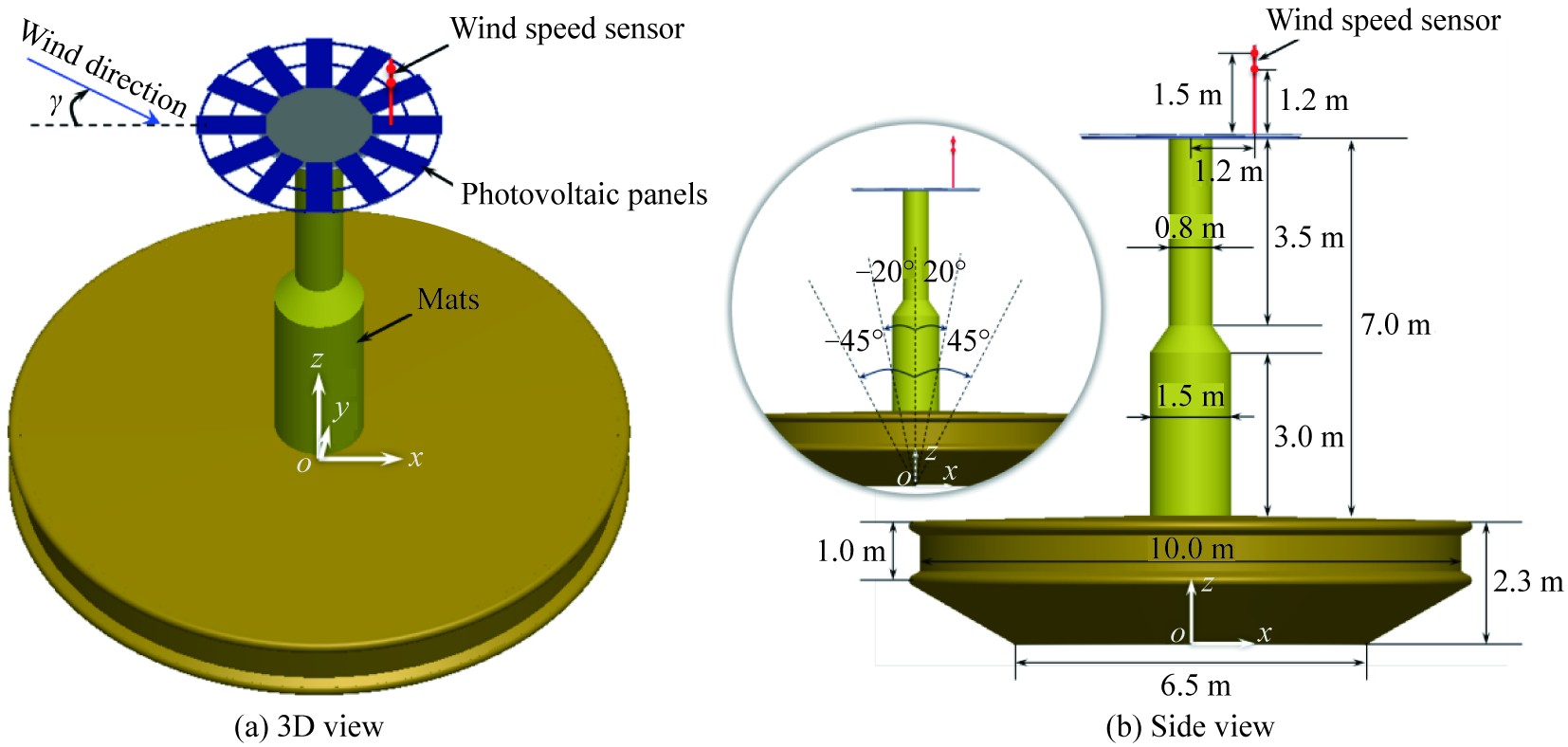
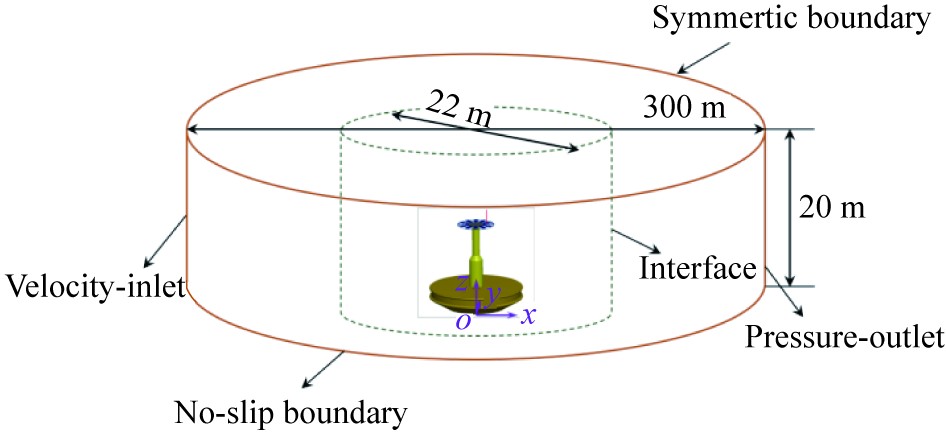
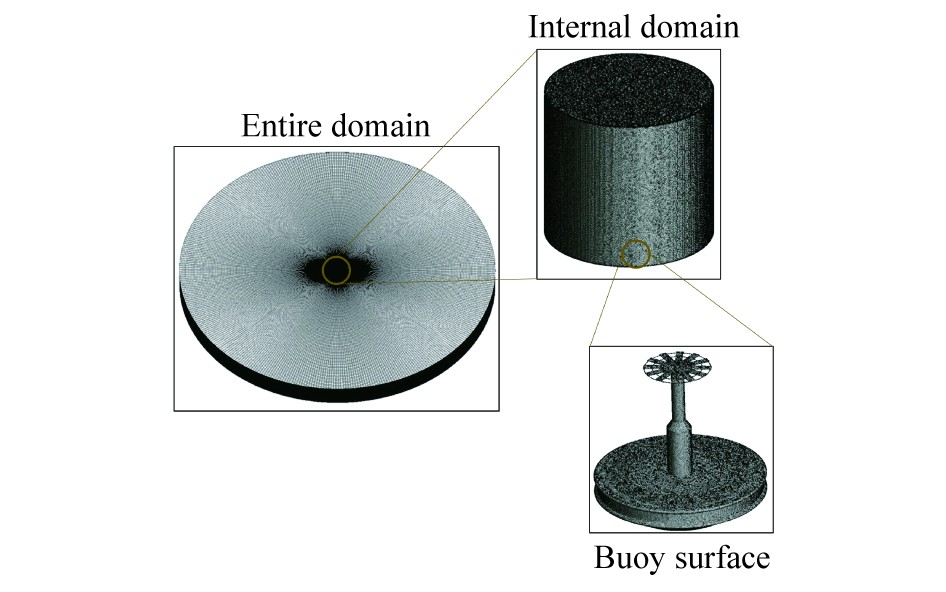
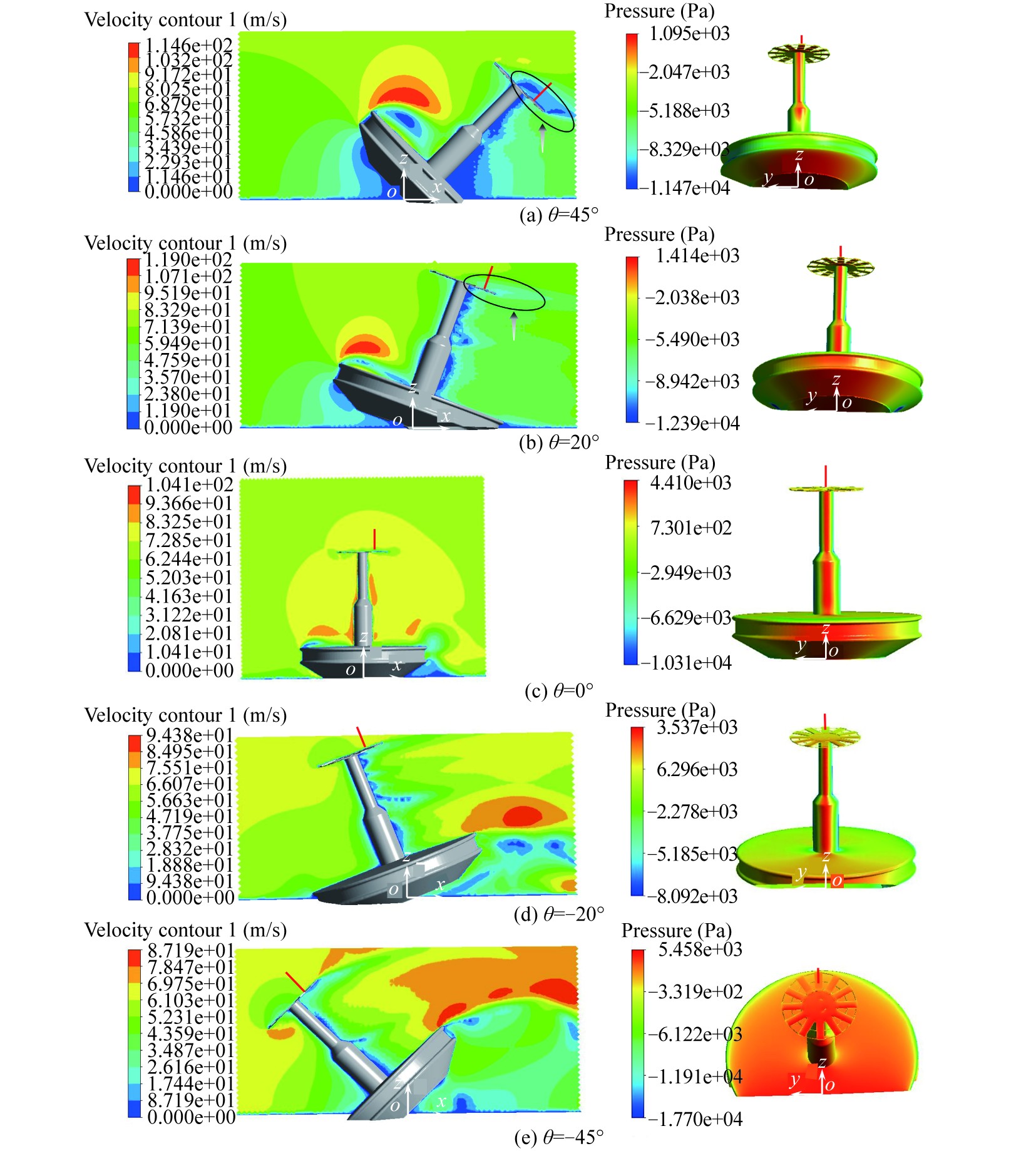
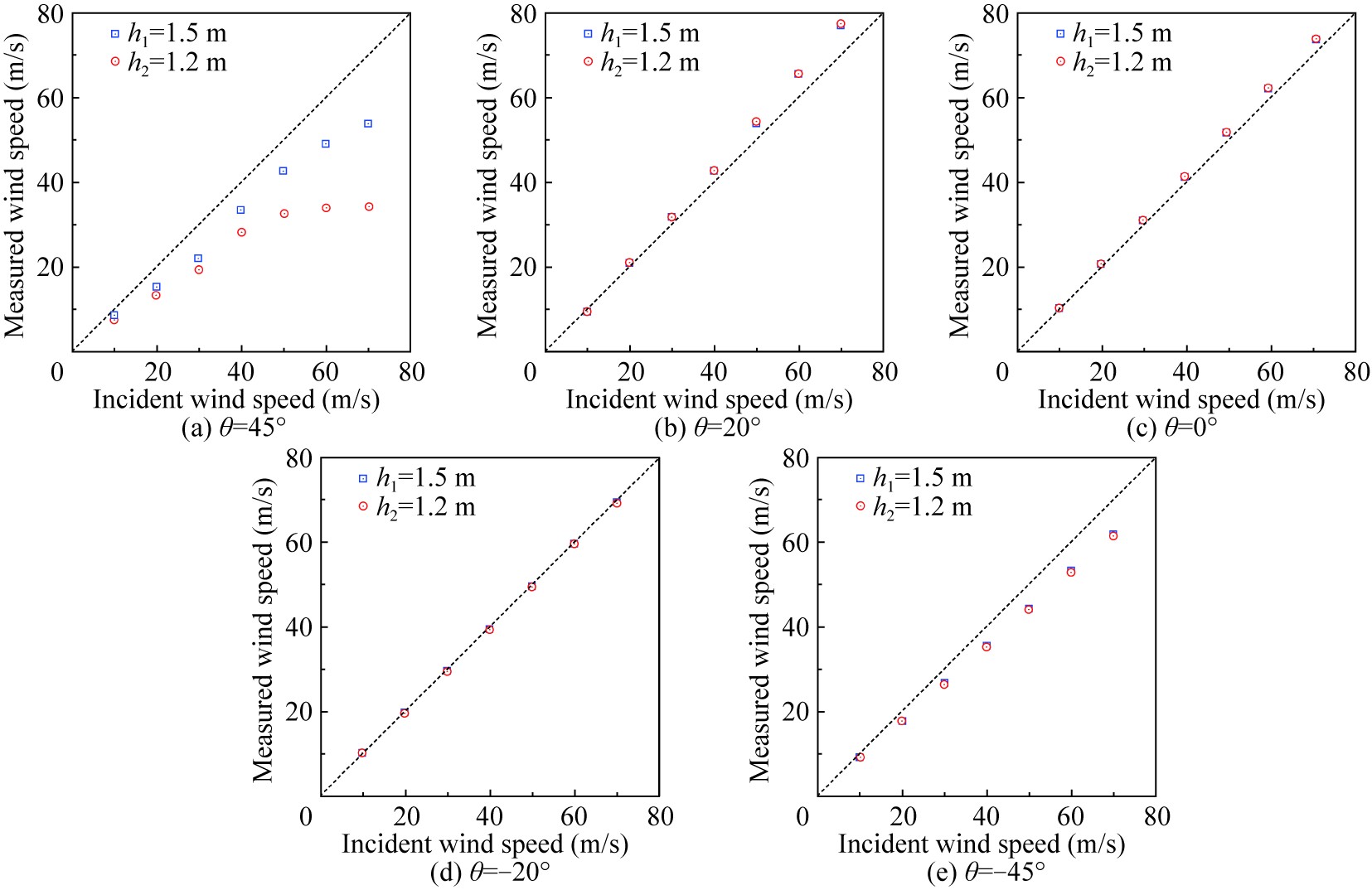
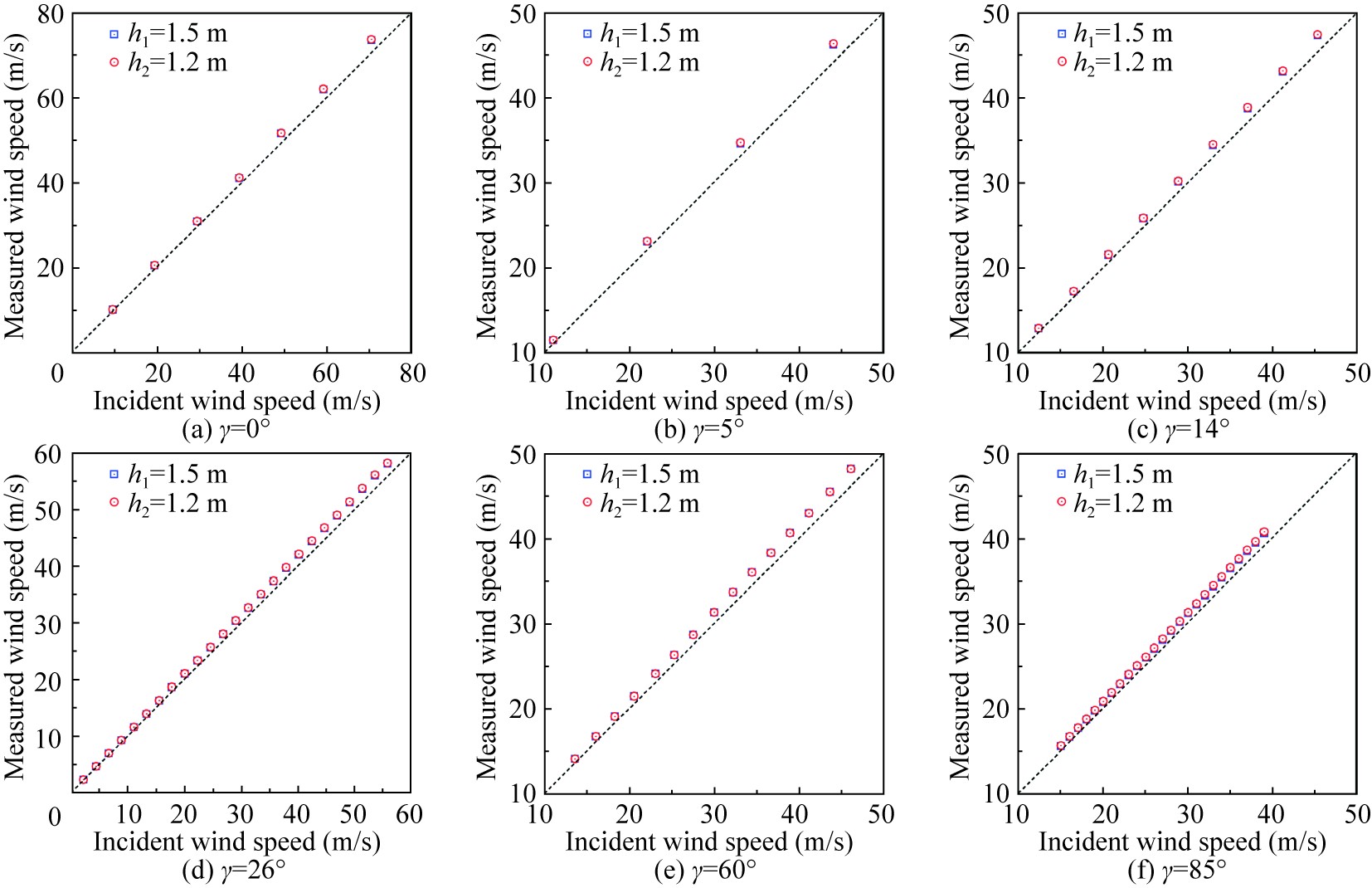
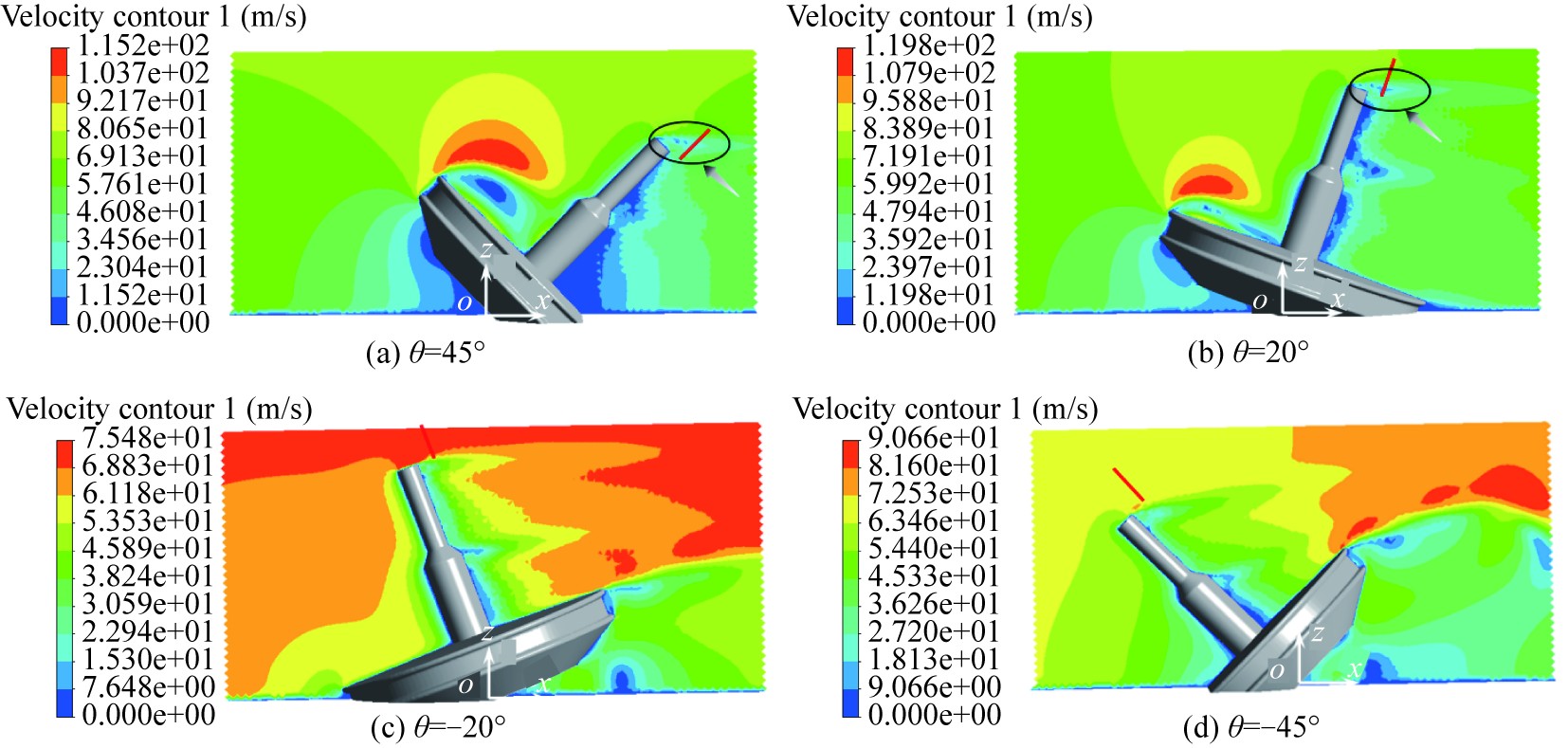
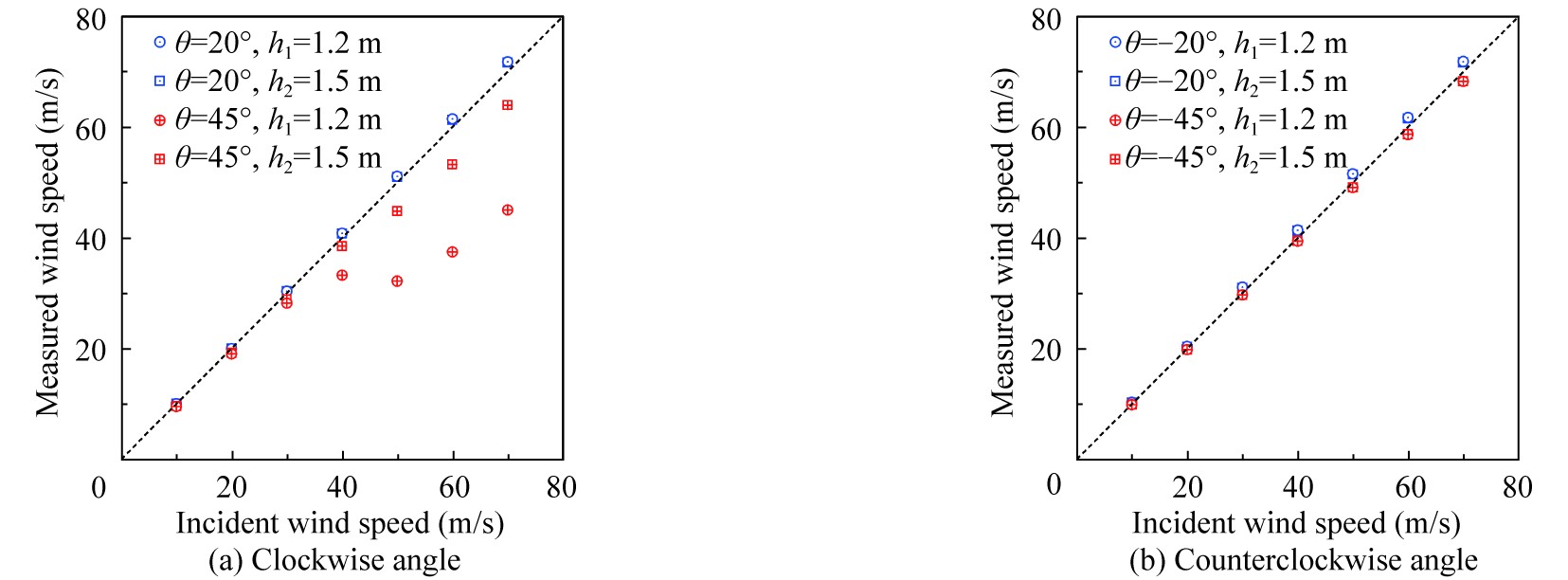
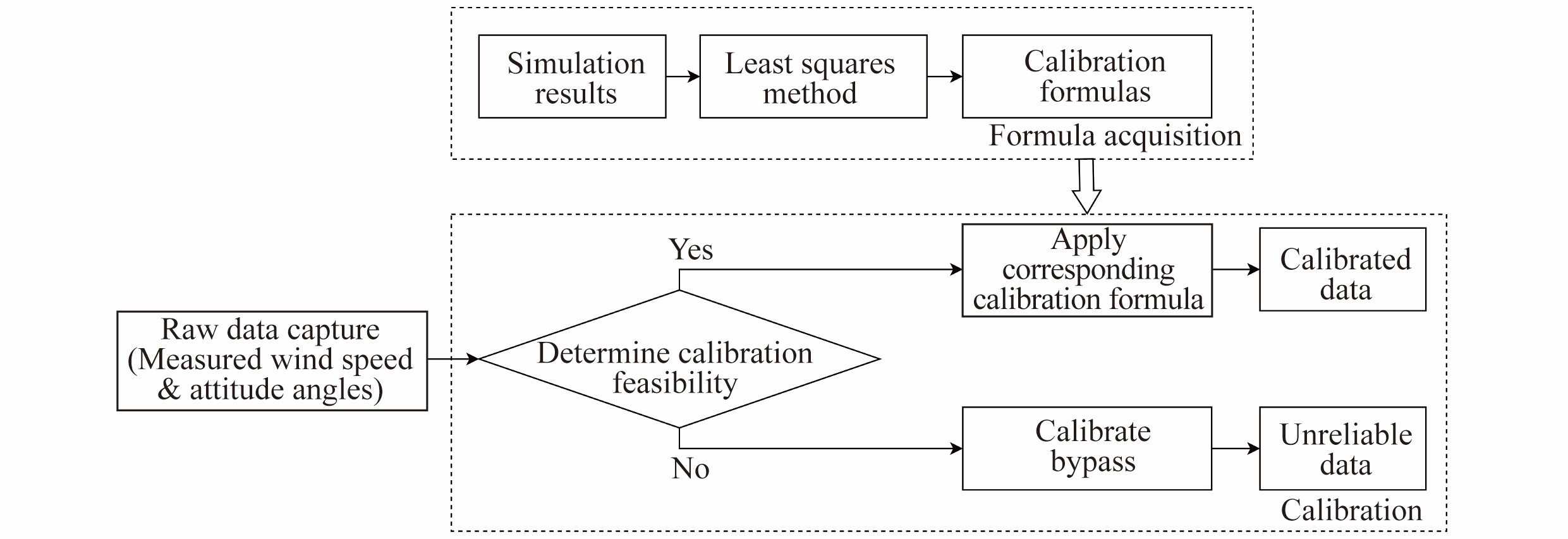
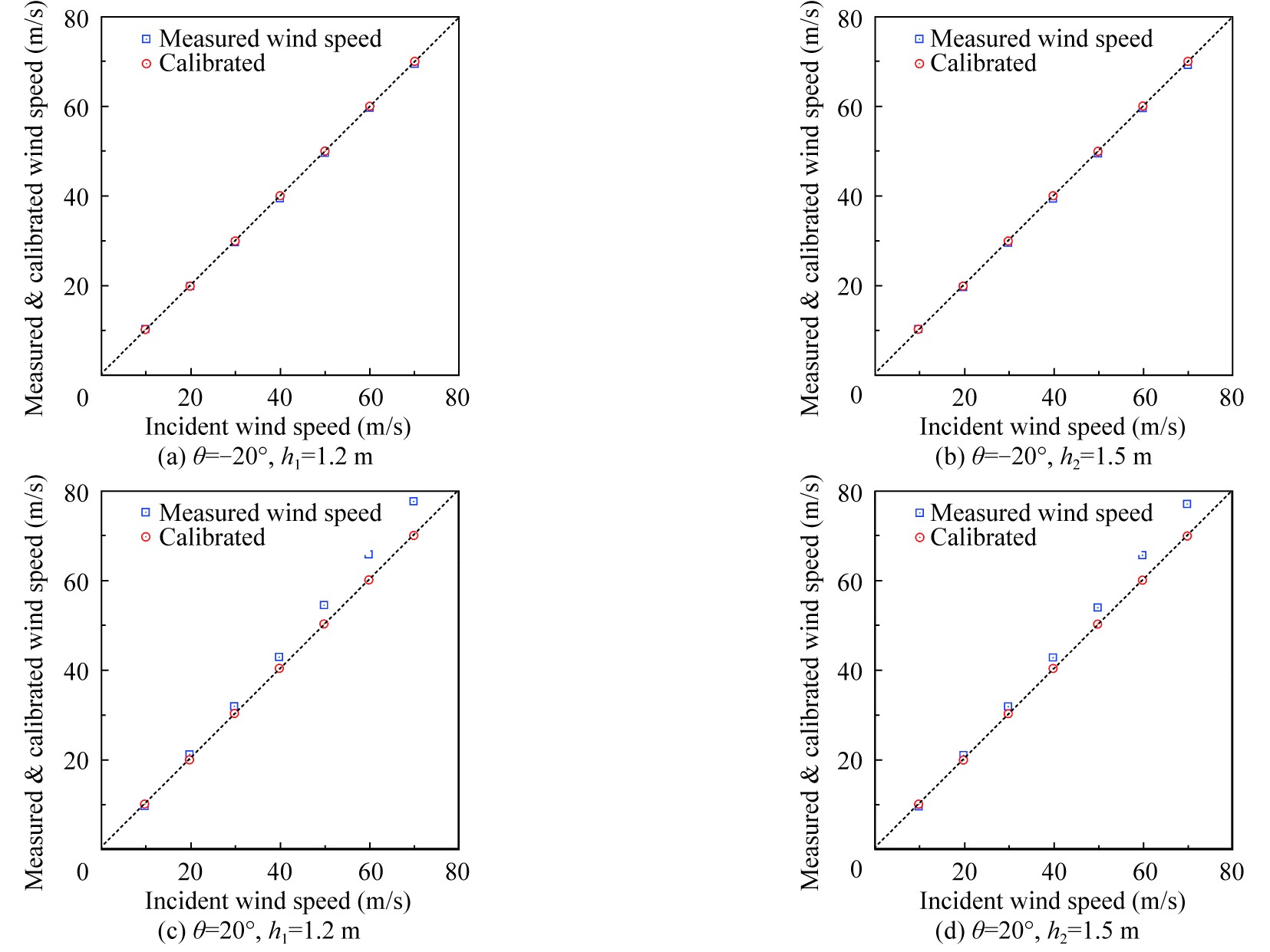
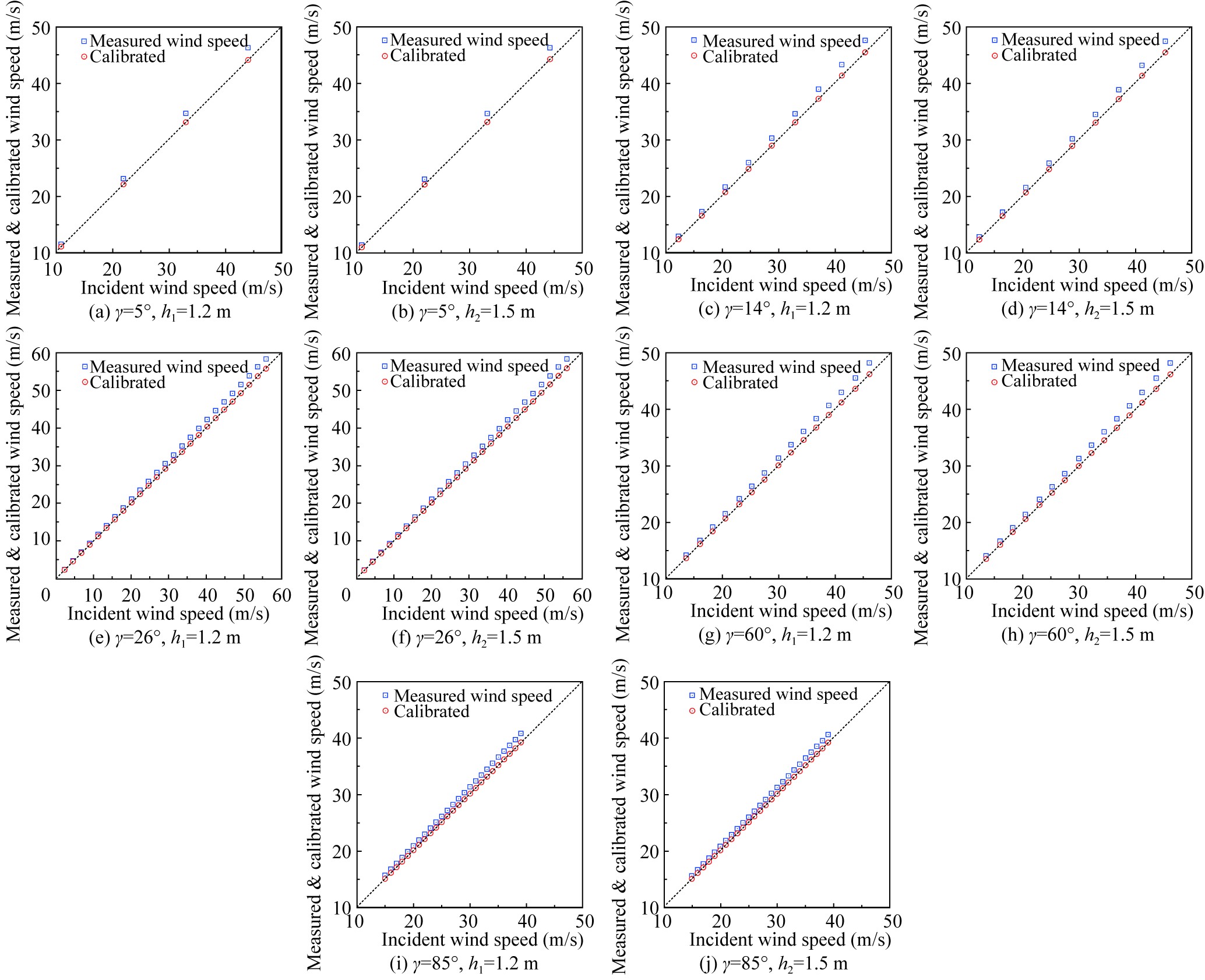
Ocean data buoys are a critical means of automatically acquiring offshore oceanographic and meteorological data, offering advantages of long-term, fixed-position, continuous, and real-time monitoring. The turbulence generated by the buoy’s structure is a significant factor affecting wind speed measurement accuracy. In this study, a 10 m-diameter buoy was analyzed to evaluate the influence of structural turbulence and shielding effects on wind speed measurements. The Reynolds-averaged Navier-Stokes (RANS) equations, combined with the RNG k–ε turbulence model, were employed to simulate the flow field and turbulence characteristics. Numerical simulations were conducted to calculate wind fields around the buoy and measured wind speeds at two sensor heights with varying pitch angles. The shielding effects on wind measurements were examined across different wind directions. To assess the impact of photovoltaic panels, wind fields and wind speed measurements were also analyzed for a configuration without these panels. Results indicate that shielding effects can cause substantial wind speed measurement errors, particularly when sensors are located on the leeward side, due to the formation of low -wind -speed zones in the wake region. Measurement error increases with higher incident wind speeds. Sensors positioned at greater elevations exhibit improved accuracy, as they are less affected by near-surface turbulence. Removing photovoltaic panels reduces measurement error; however, the shielding effects caused by the buoy body itself remain significant and cannot be neglected.
Ocean data buoys are a critical means of automatically acquiring offshore oceanographic and meteorological data, offering advantages of long-term, fixed-position, continuous, and real-time monitoring. The turbulence generated by the buoy’s structure is a significant factor affecting wind speed measurement accuracy. In this study, a 10 m-diameter buoy was analyzed to evaluate the influence of structural turbulence and shielding effects on wind speed measurements. The Reynolds-averaged Navier-Stokes (RANS) equations, combined with the RNG k–ε turbulence model, were employed to simulate the flow field and turbulence characteristics. Numerical simulations were conducted to calculate wind fields around the buoy and measured wind speeds at two sensor heights with varying pitch angles. The shielding effects on wind measurements were examined across different wind directions. To assess the impact of photovoltaic panels, wind fields and wind speed measurements were also analyzed for a configuration without these panels. Results indicate that shielding effects can cause substantial wind speed measurement errors, particularly when sensors are located on the leeward side, due to the formation of low -wind -speed zones in the wake region. Measurement error increases with higher incident wind speeds. Sensors positioned at greater elevations exhibit improved accuracy, as they are less affected by near-surface turbulence. Removing photovoltaic panels reduces measurement error; however, the shielding effects caused by the buoy body itself remain significant and cannot be neglected.
2026, 40(3)
:656-666.
doi: 10.1007/s13344-026-0050-0
Abstract:
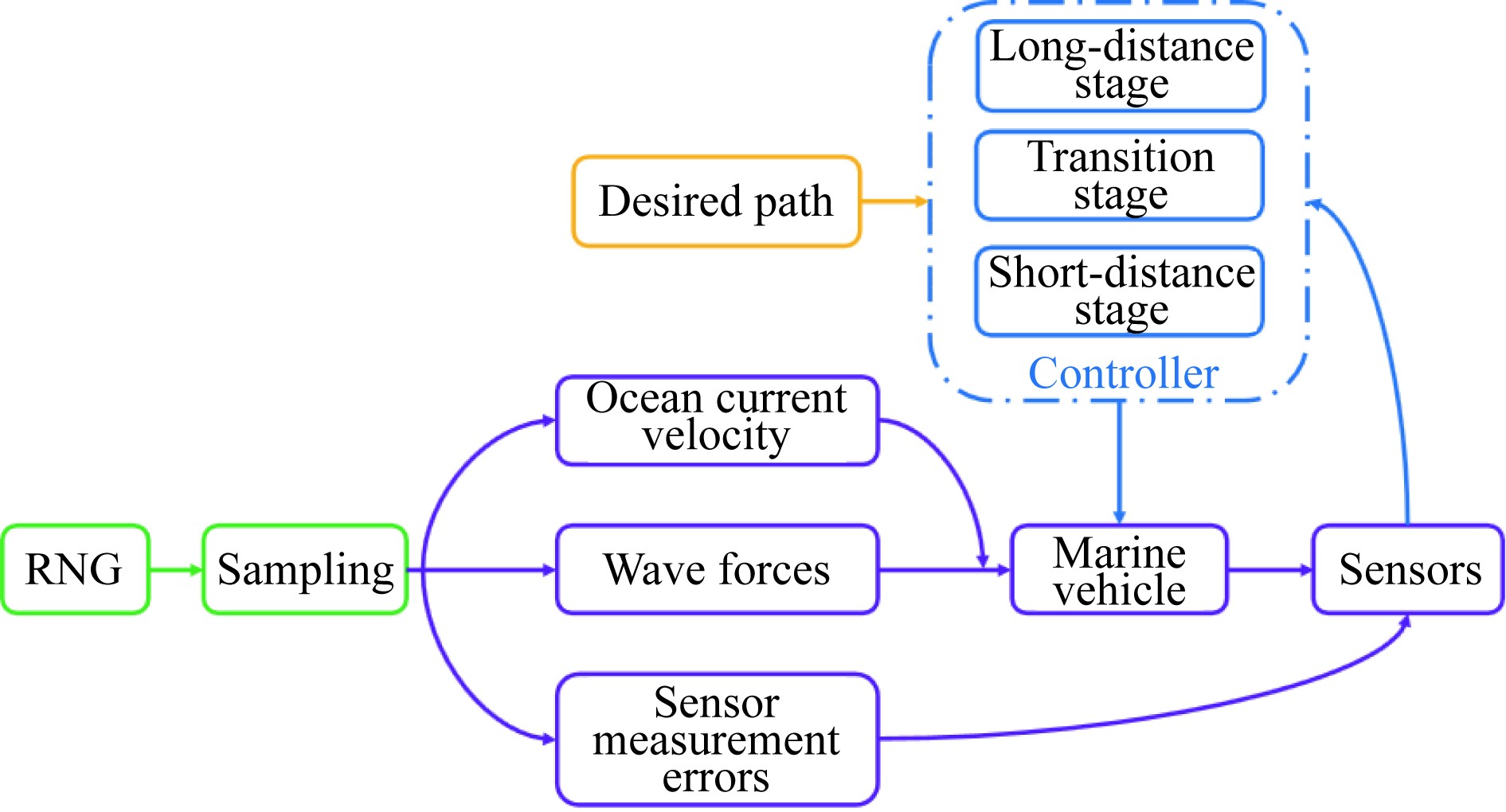
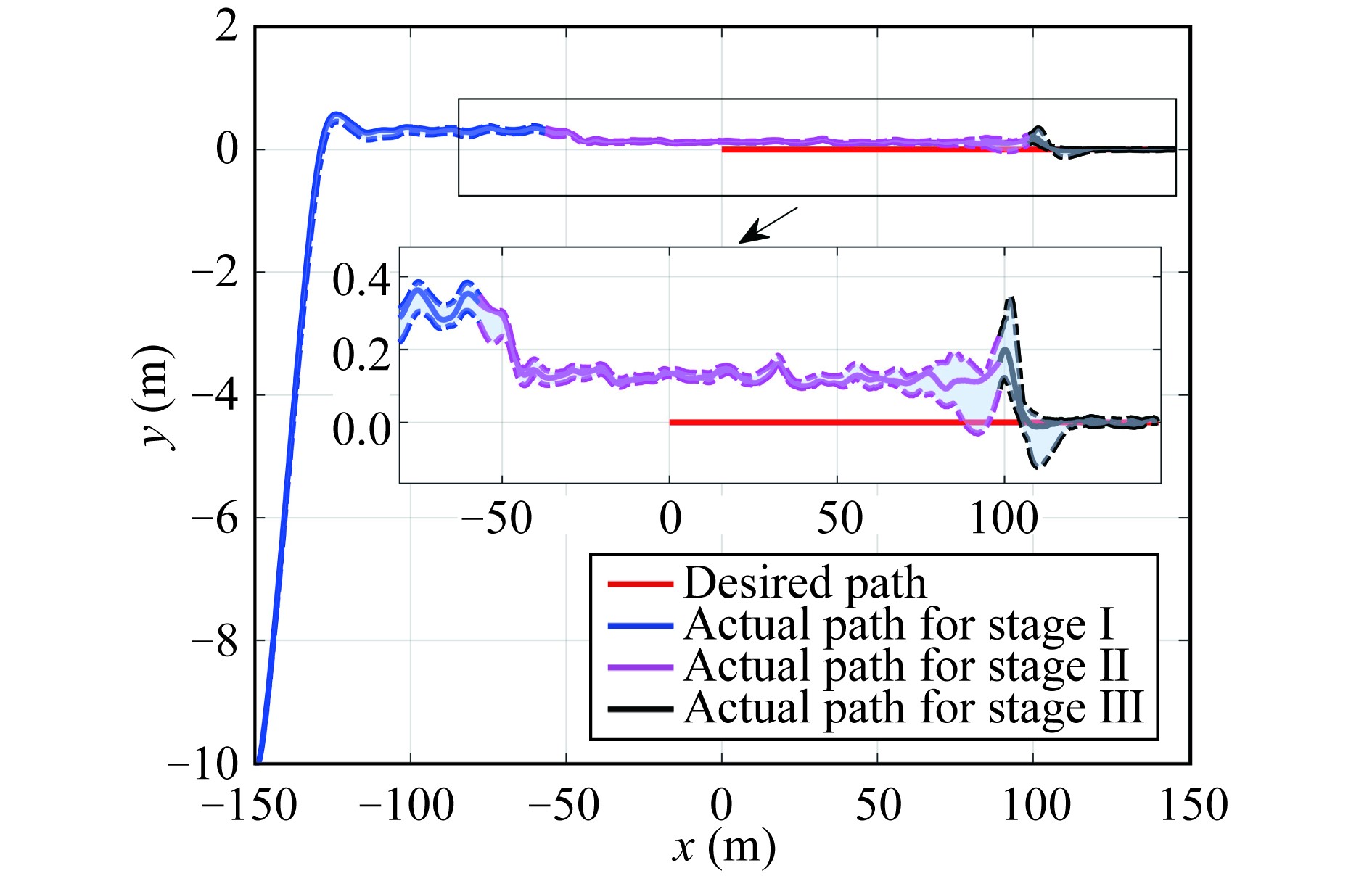
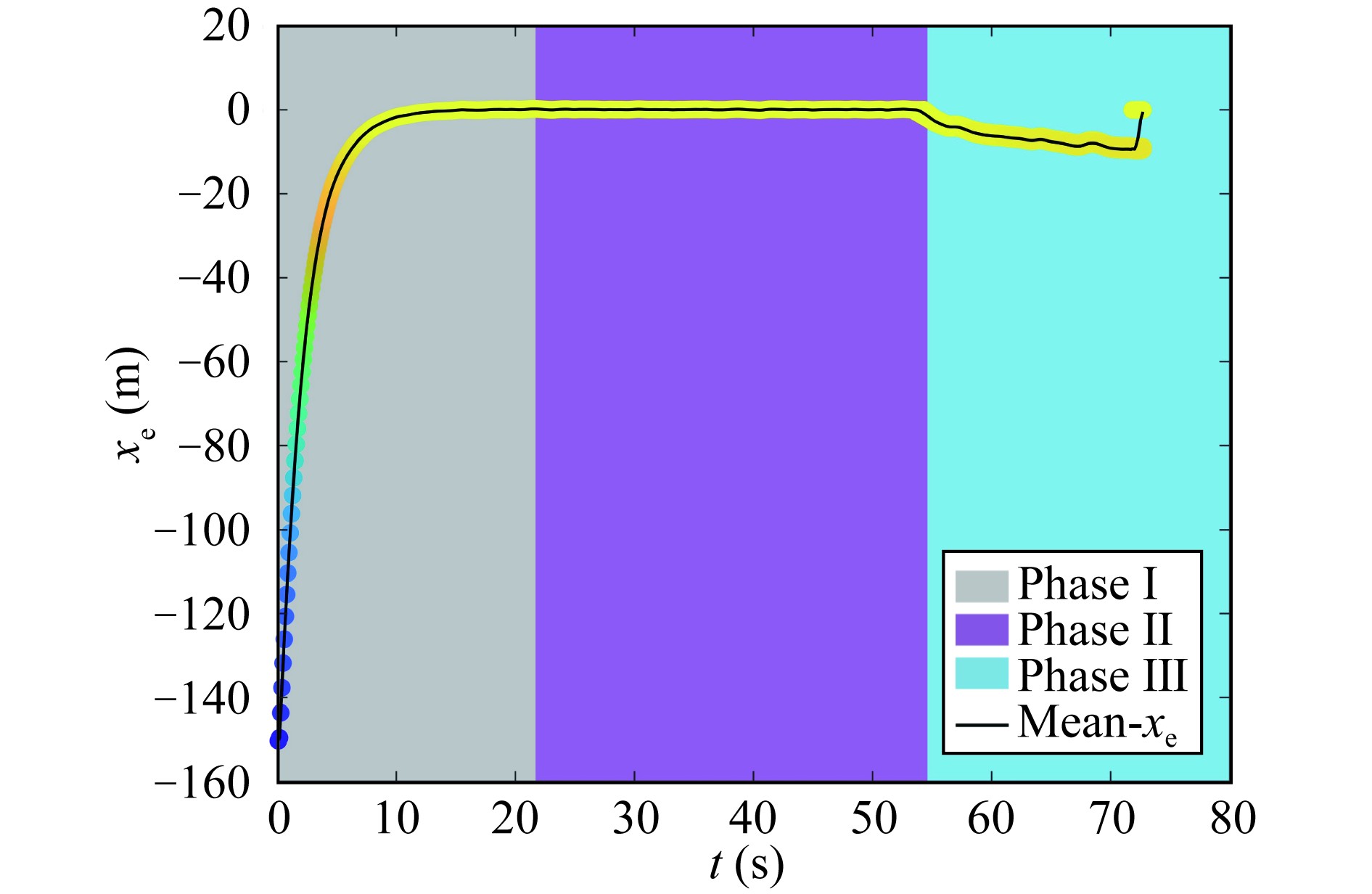
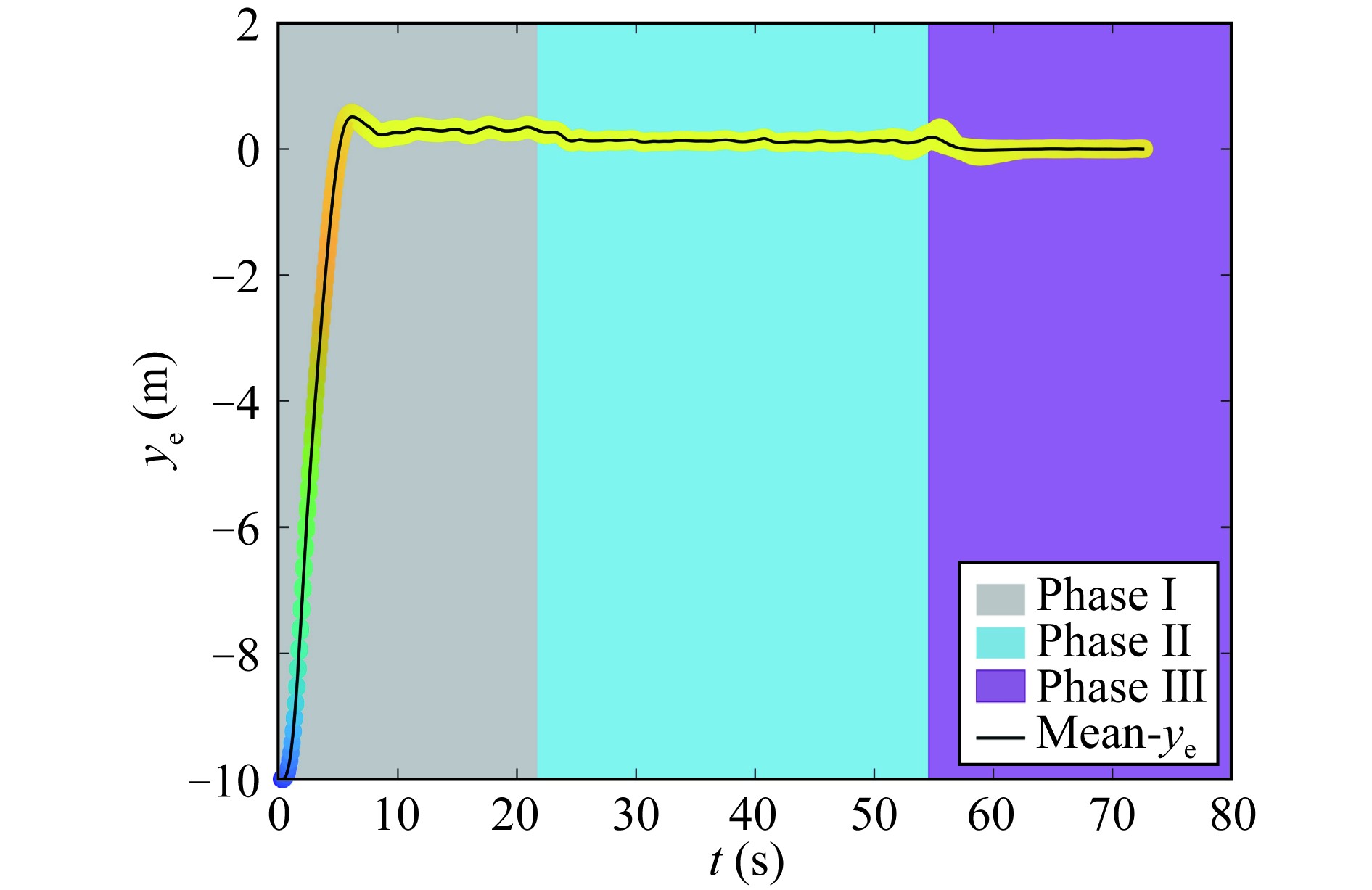
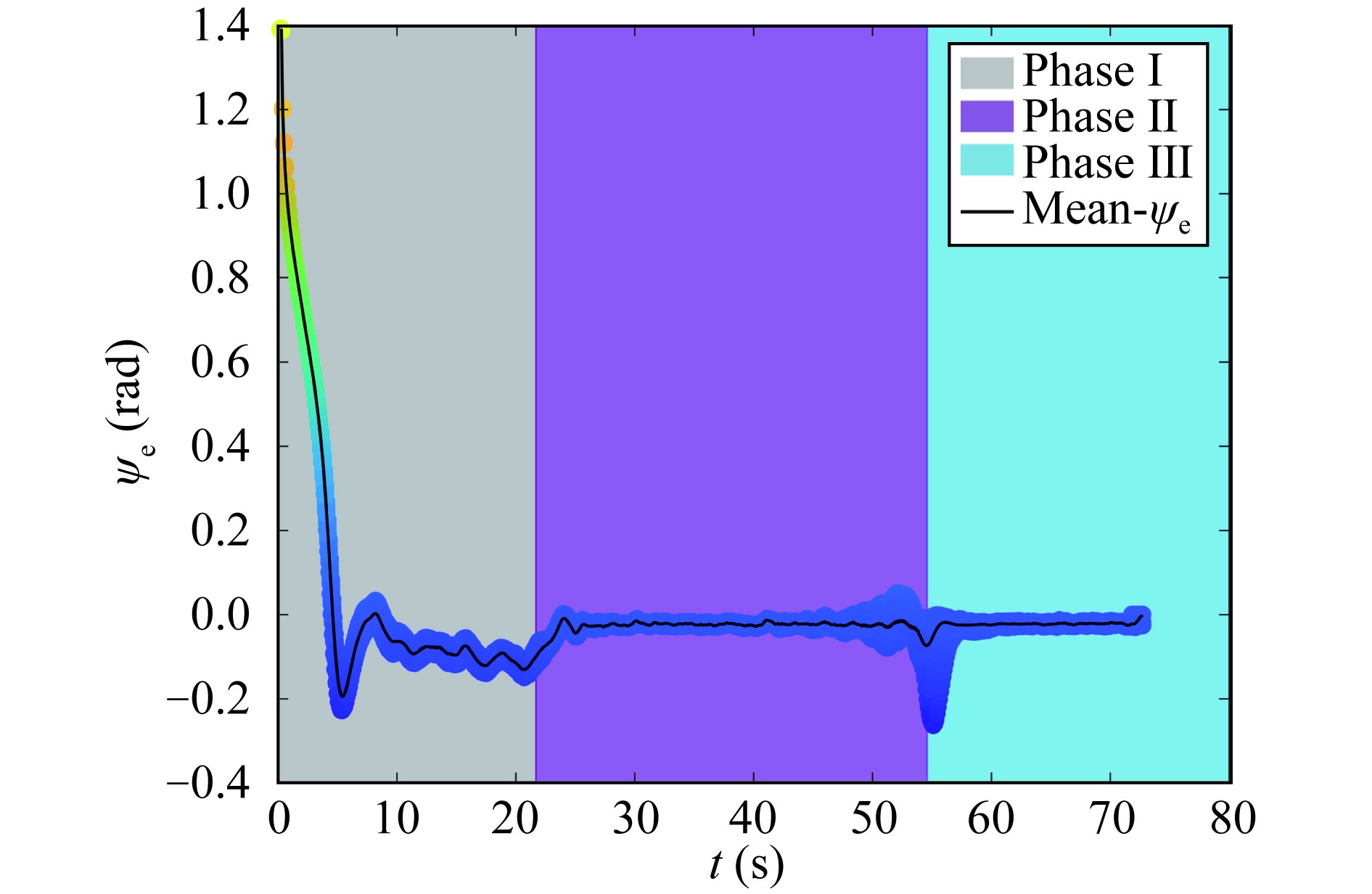
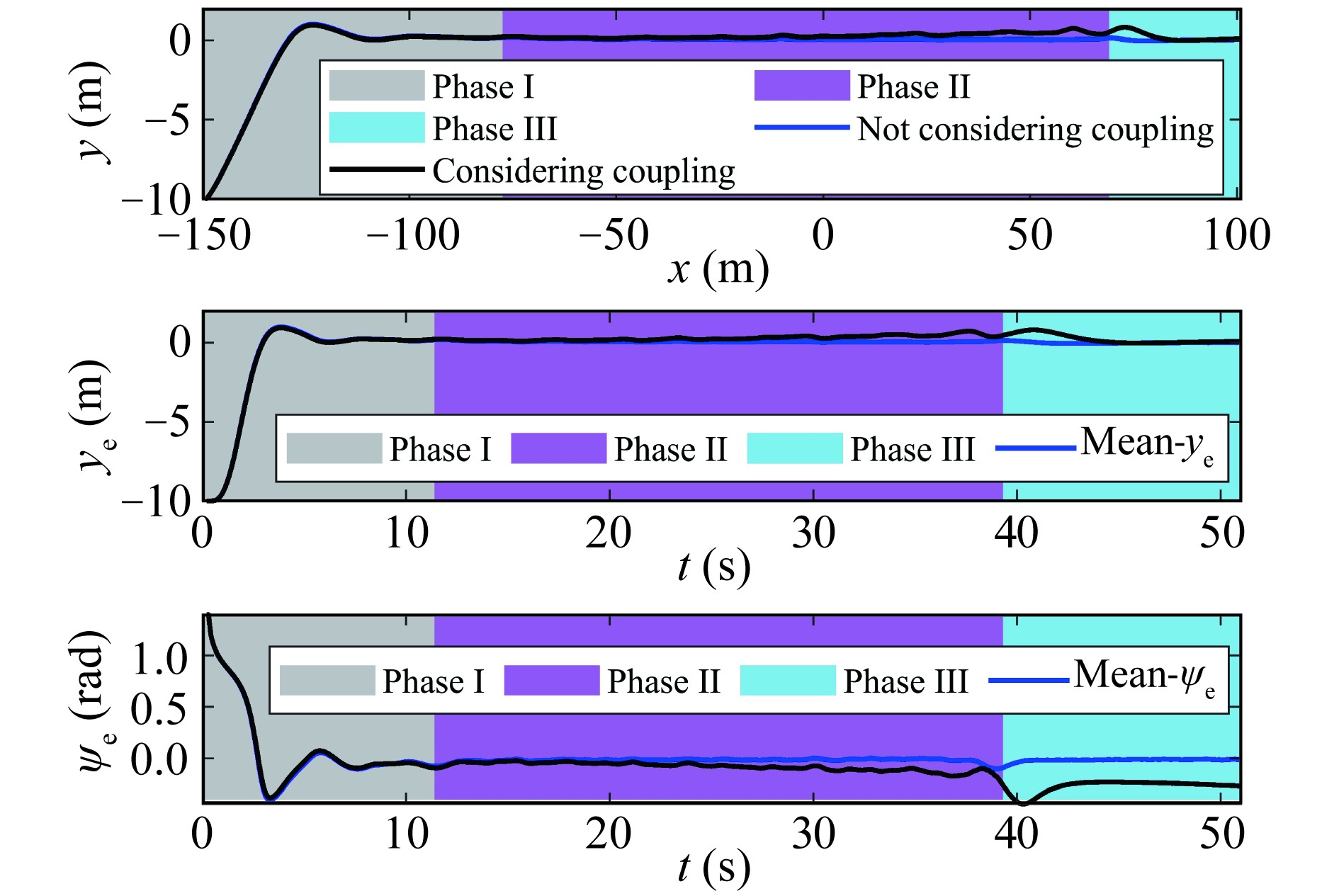
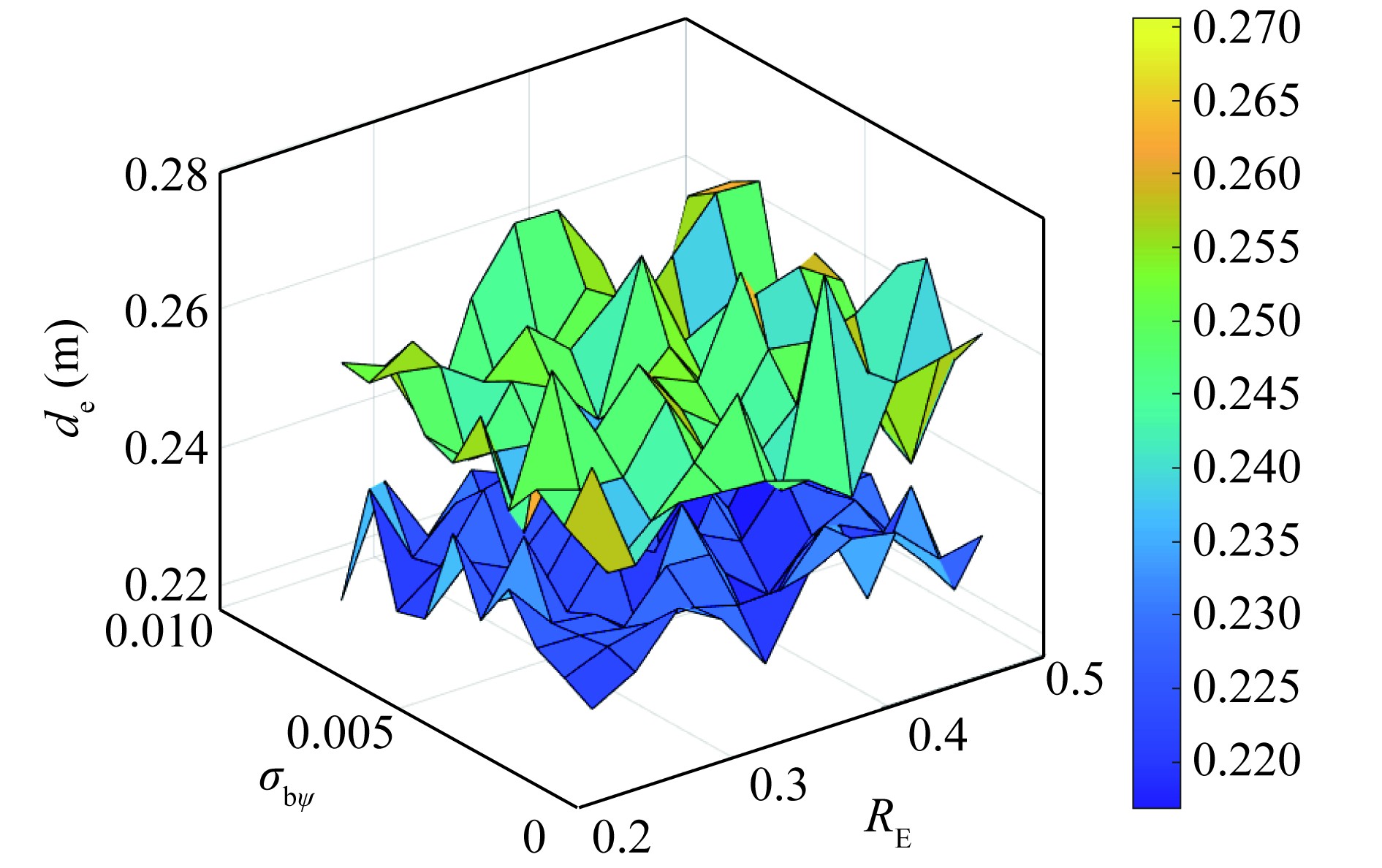
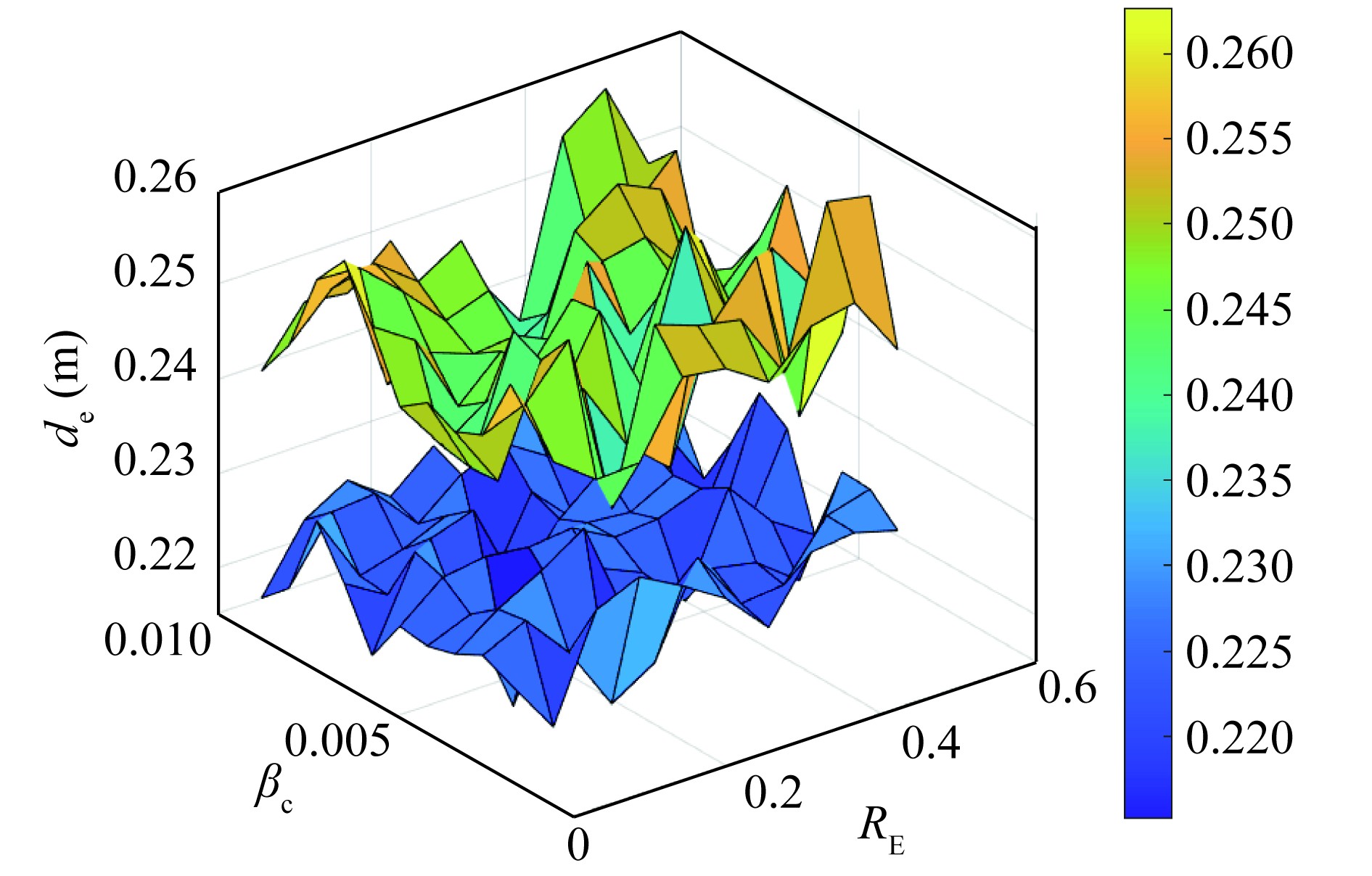
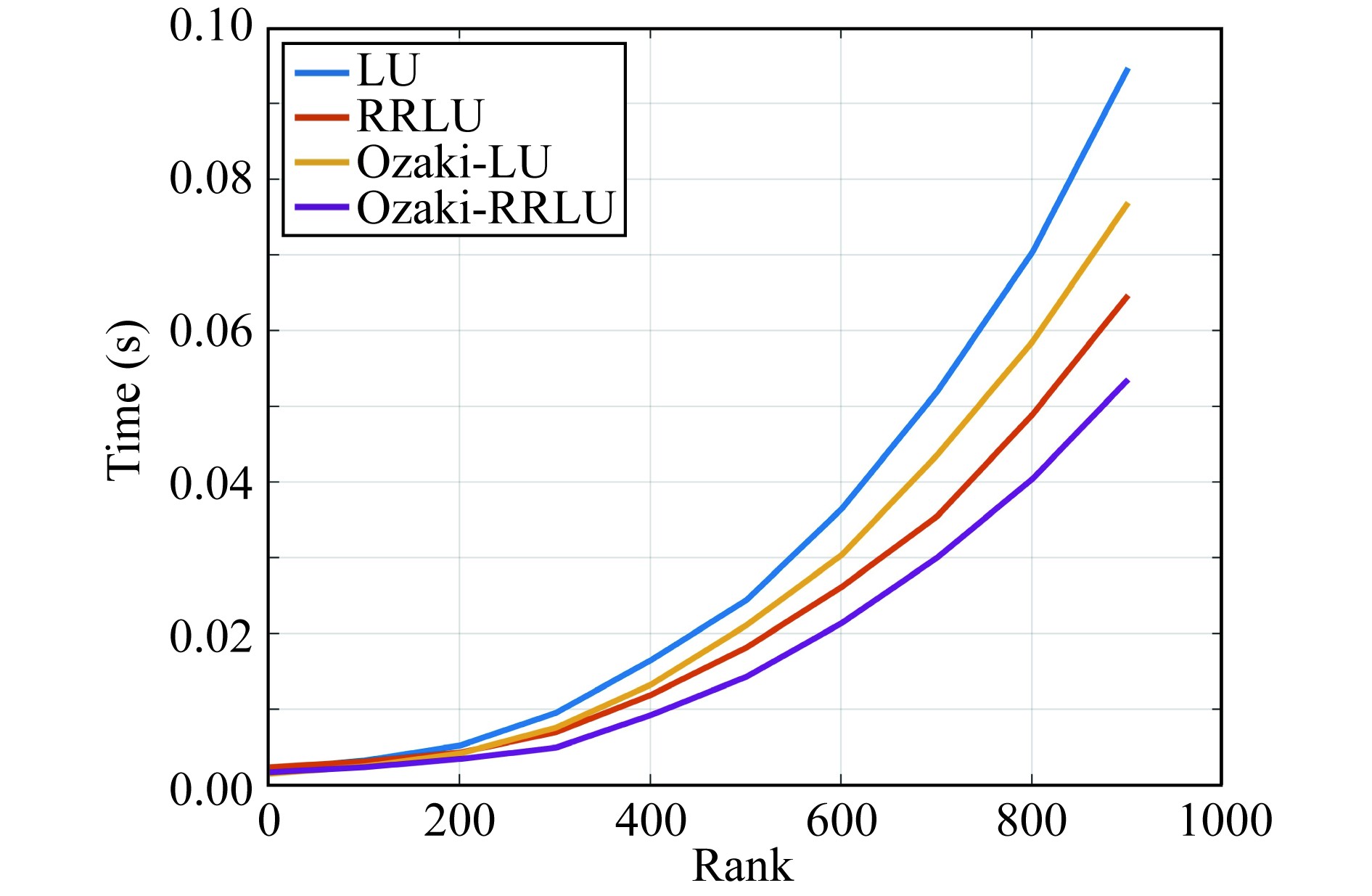
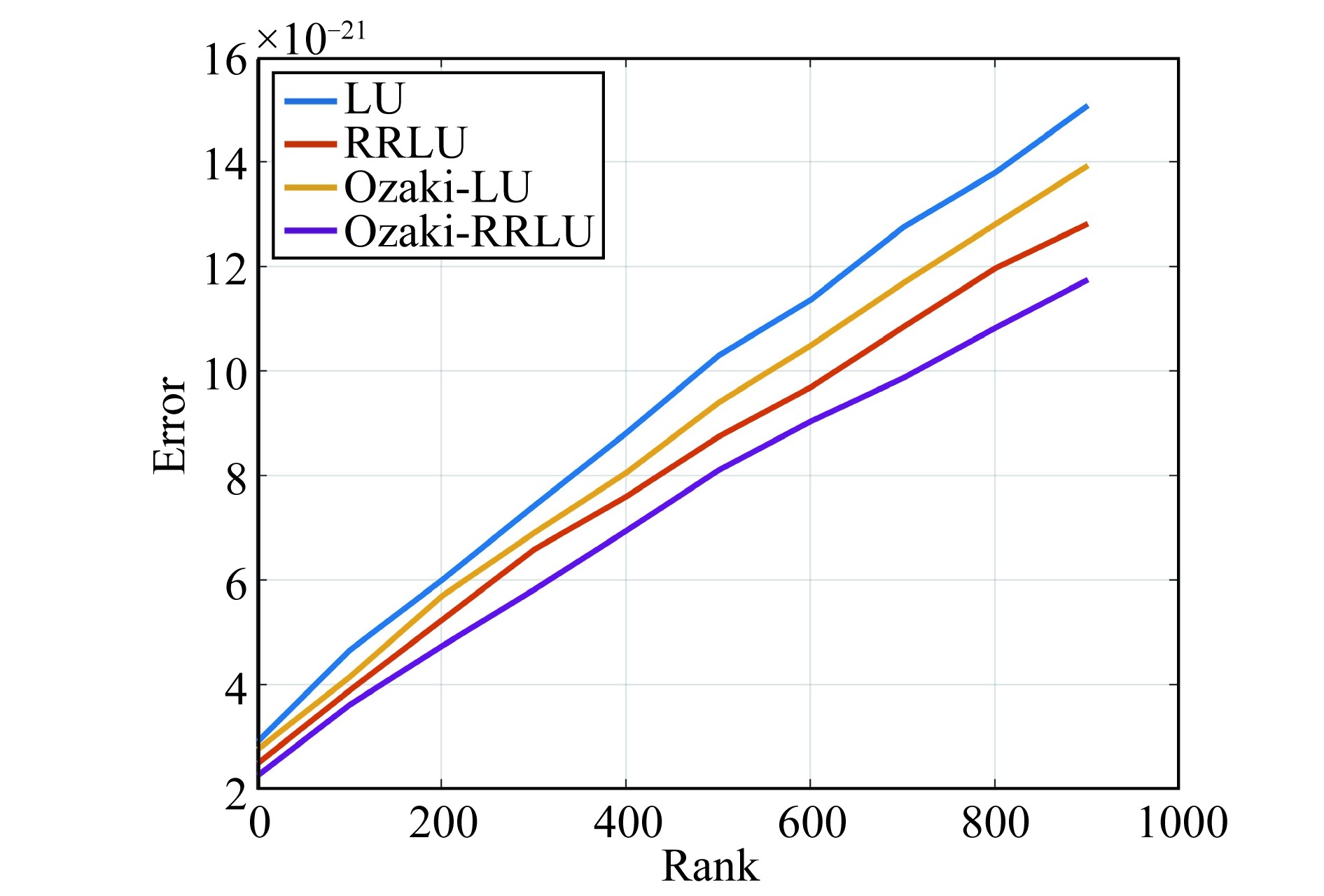
This study presents a precision analysis of underwater docking control for marine vehicles considering coupled random factors through Monte Carlo simulations. The analysis of how various random factors and input parameters affect docking accuracy is essential, given the stochastic nature of sensor measurement errors, ocean currents, and wave forces. Initially, a vehicle model incorporating uncertainties and randomness composed of coupled random variables is established. Subsequently, the research presents a robust controller for three-stage underwater docking and a systematic framework for docking accuracy analysis. Furthermore, an enhanced sampling system is developed to effectively decouple the coupled random factors for the Monte Carlo simulations. Comprehensive statistical tests validate its substantial advantages over traditional sampling approaches. The comparative simulation results demonstrate that coupling relationships among random factors in precision analysis result in increased docking errors compared with uncoupled scenarios. Additionally, the proposed sampling method demonstrates improved efficiency in computational time while minimizing both decomposition and docking errors.
This study presents a precision analysis of underwater docking control for marine vehicles considering coupled random factors through Monte Carlo simulations. The analysis of how various random factors and input parameters affect docking accuracy is essential, given the stochastic nature of sensor measurement errors, ocean currents, and wave forces. Initially, a vehicle model incorporating uncertainties and randomness composed of coupled random variables is established. Subsequently, the research presents a robust controller for three-stage underwater docking and a systematic framework for docking accuracy analysis. Furthermore, an enhanced sampling system is developed to effectively decouple the coupled random factors for the Monte Carlo simulations. Comprehensive statistical tests validate its substantial advantages over traditional sampling approaches. The comparative simulation results demonstrate that coupling relationships among random factors in precision analysis result in increased docking errors compared with uncoupled scenarios. Additionally, the proposed sampling method demonstrates improved efficiency in computational time while minimizing both decomposition and docking errors.
2026, 40(3)
:667-680.
doi: 10.1007/s13344-026-0051-z
Abstract:
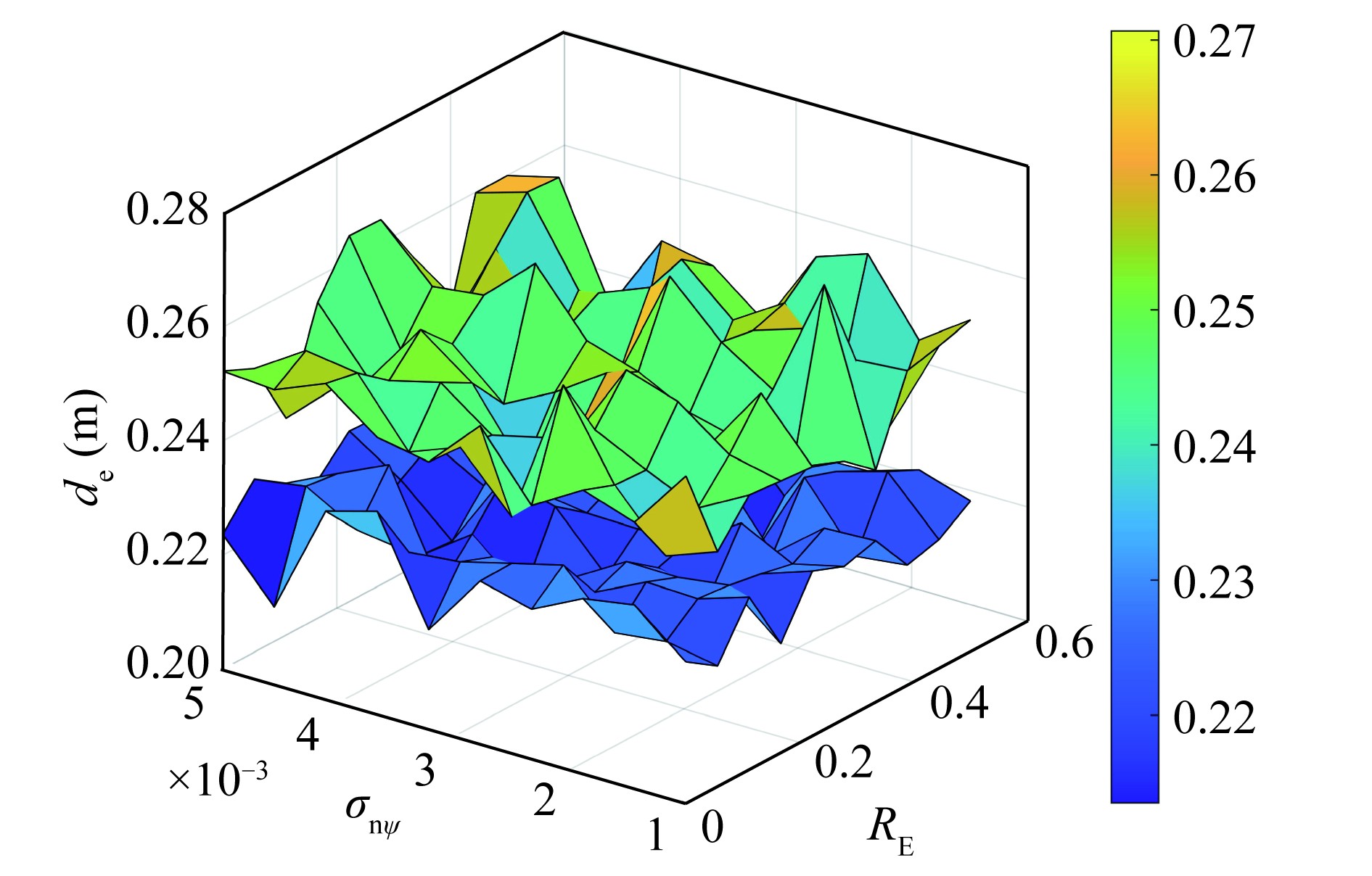
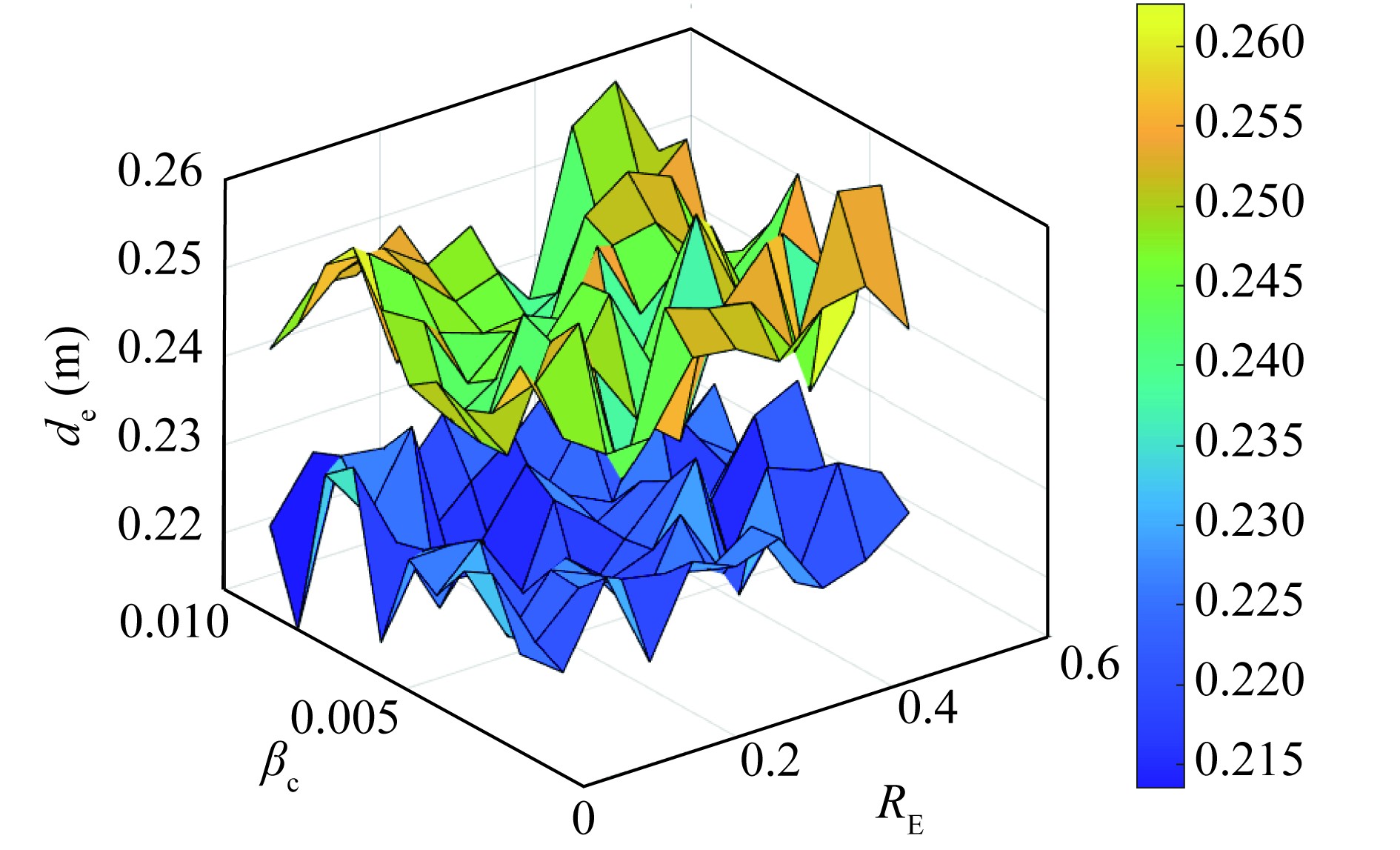
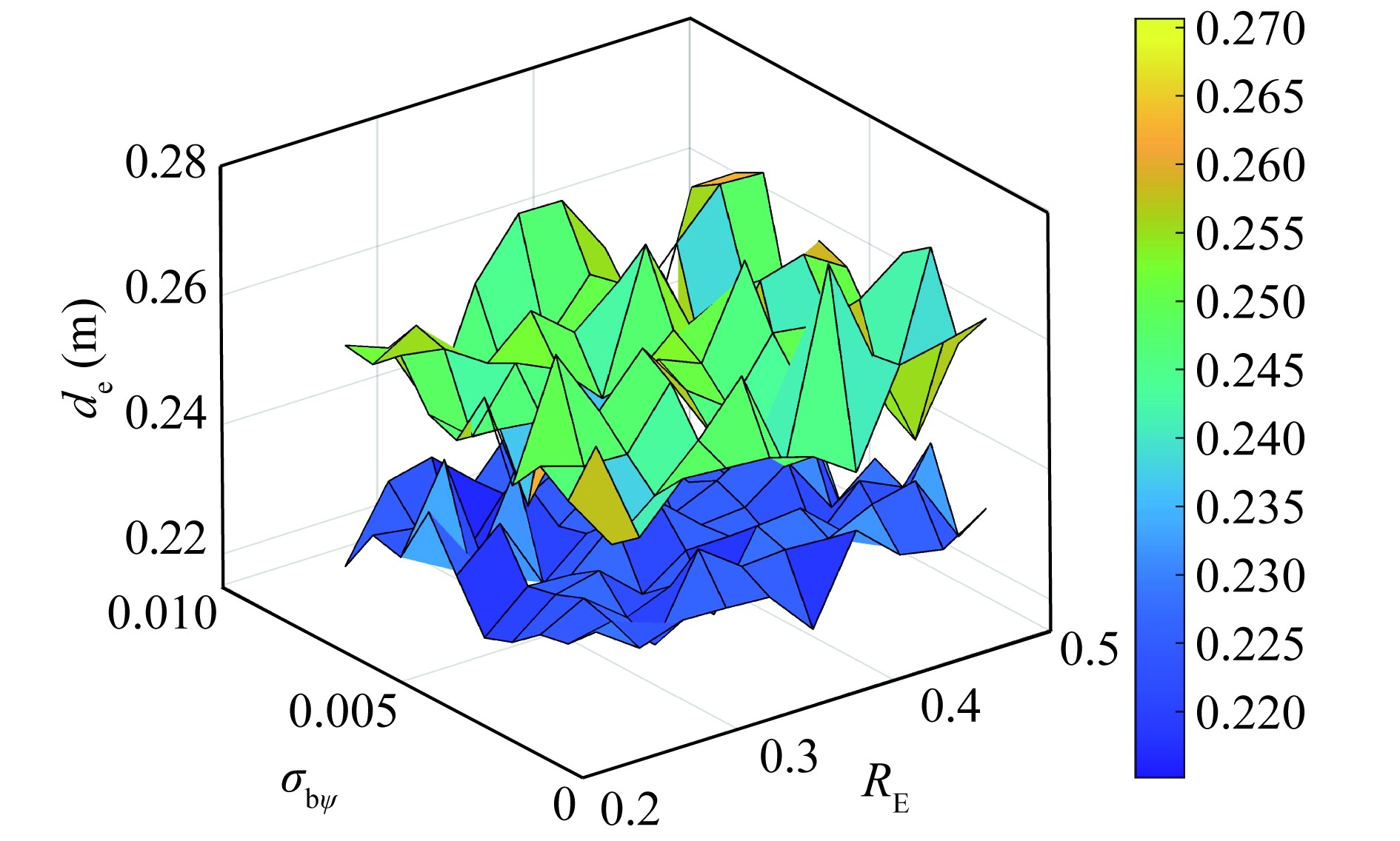
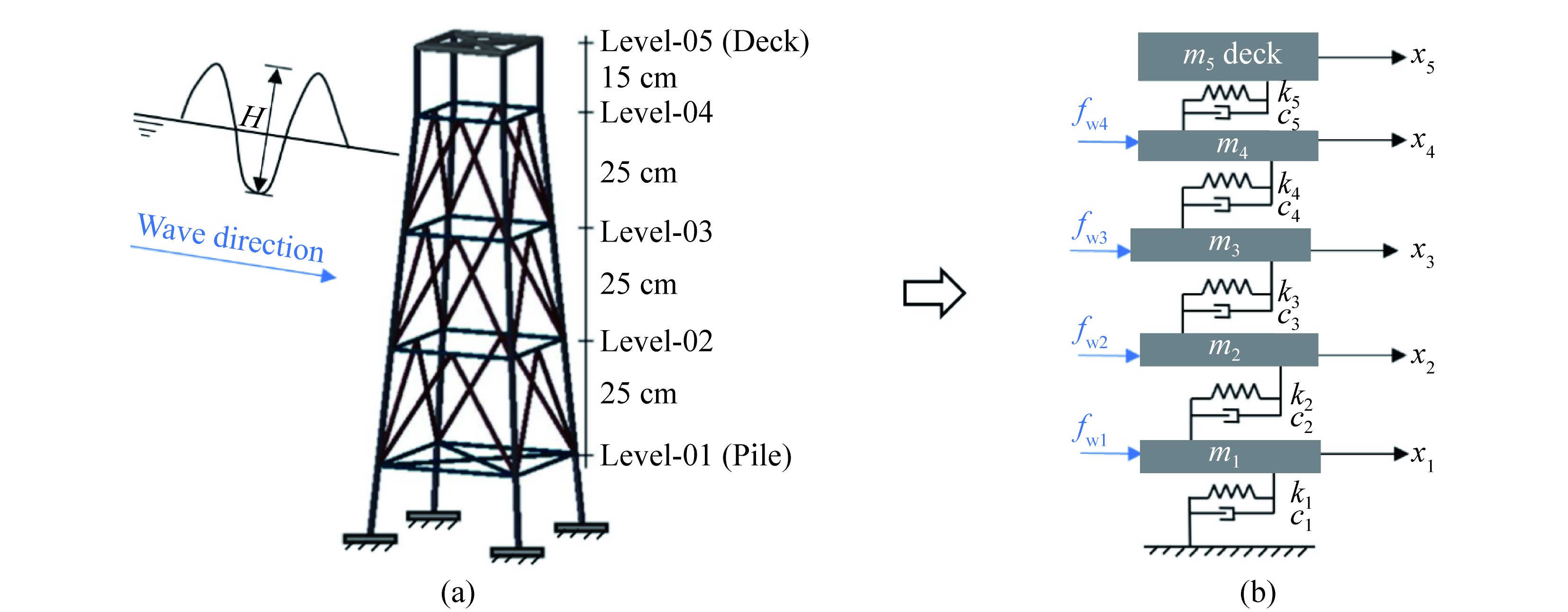
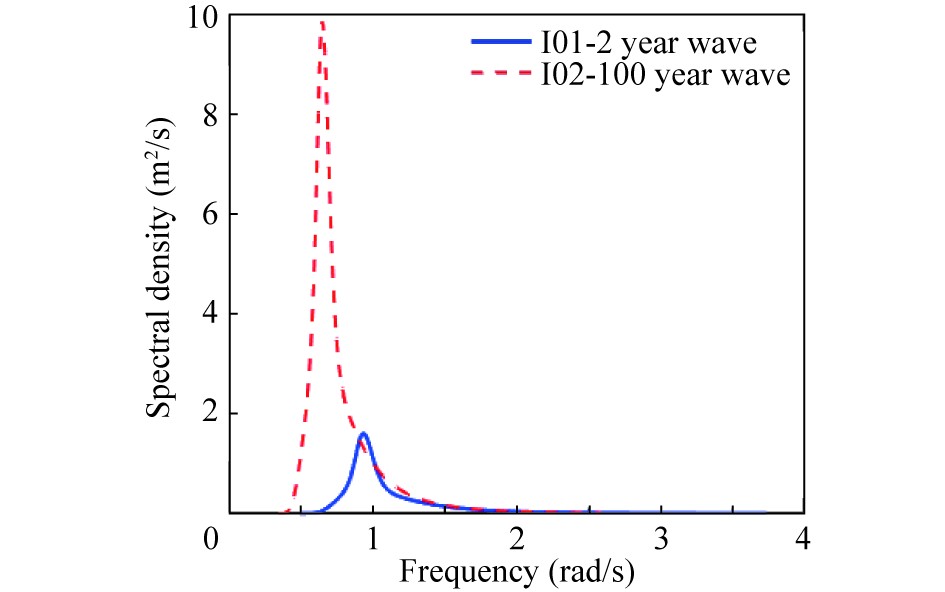
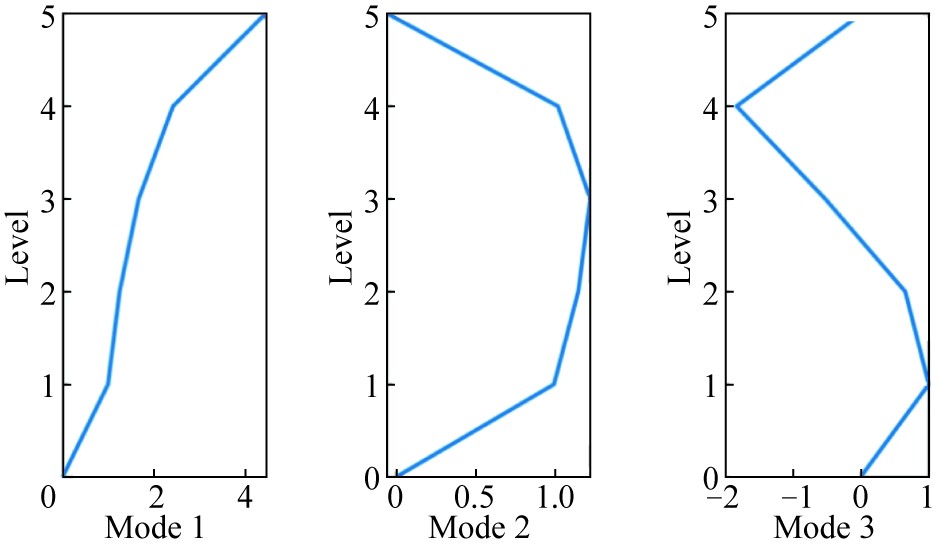
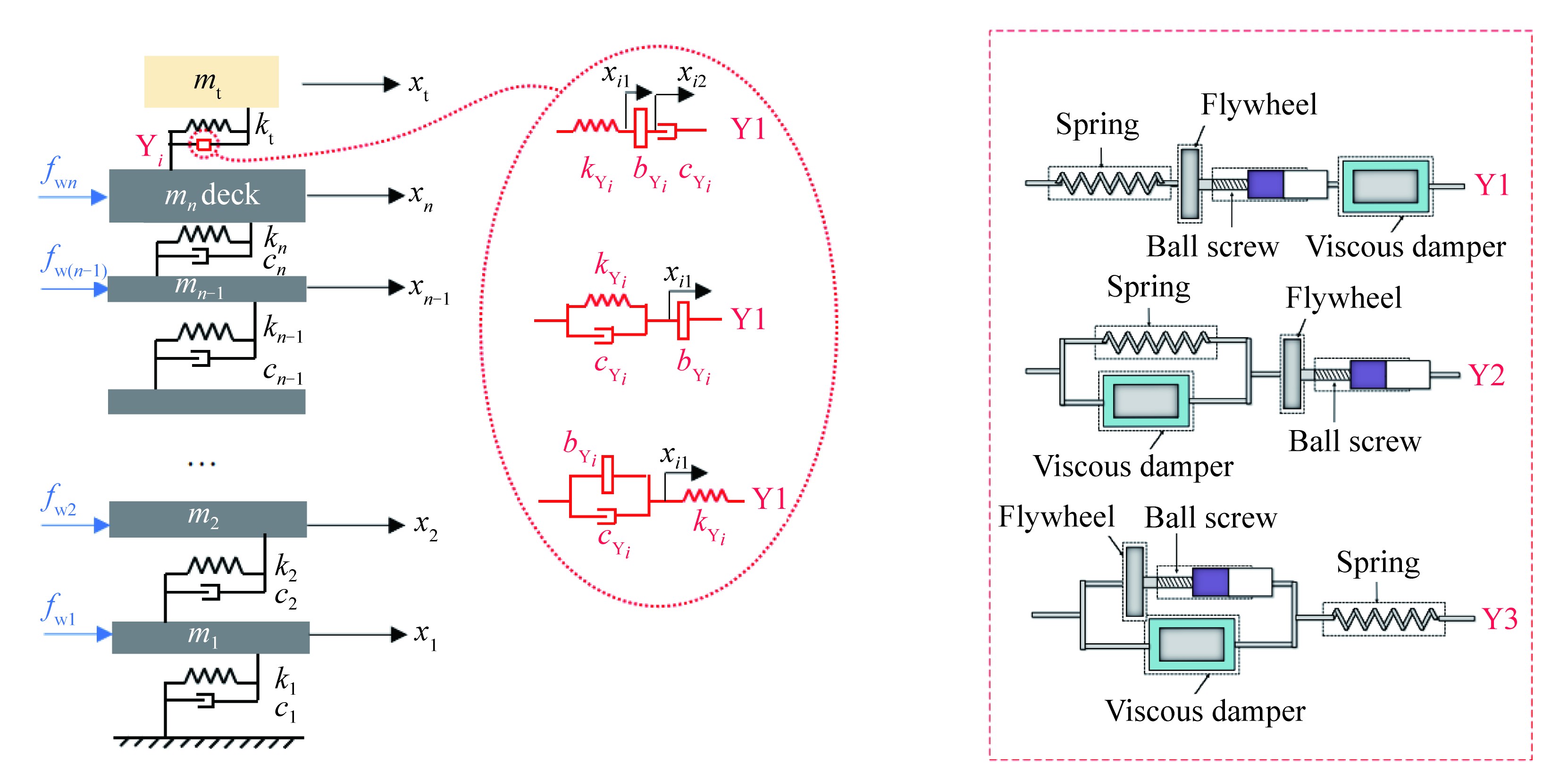
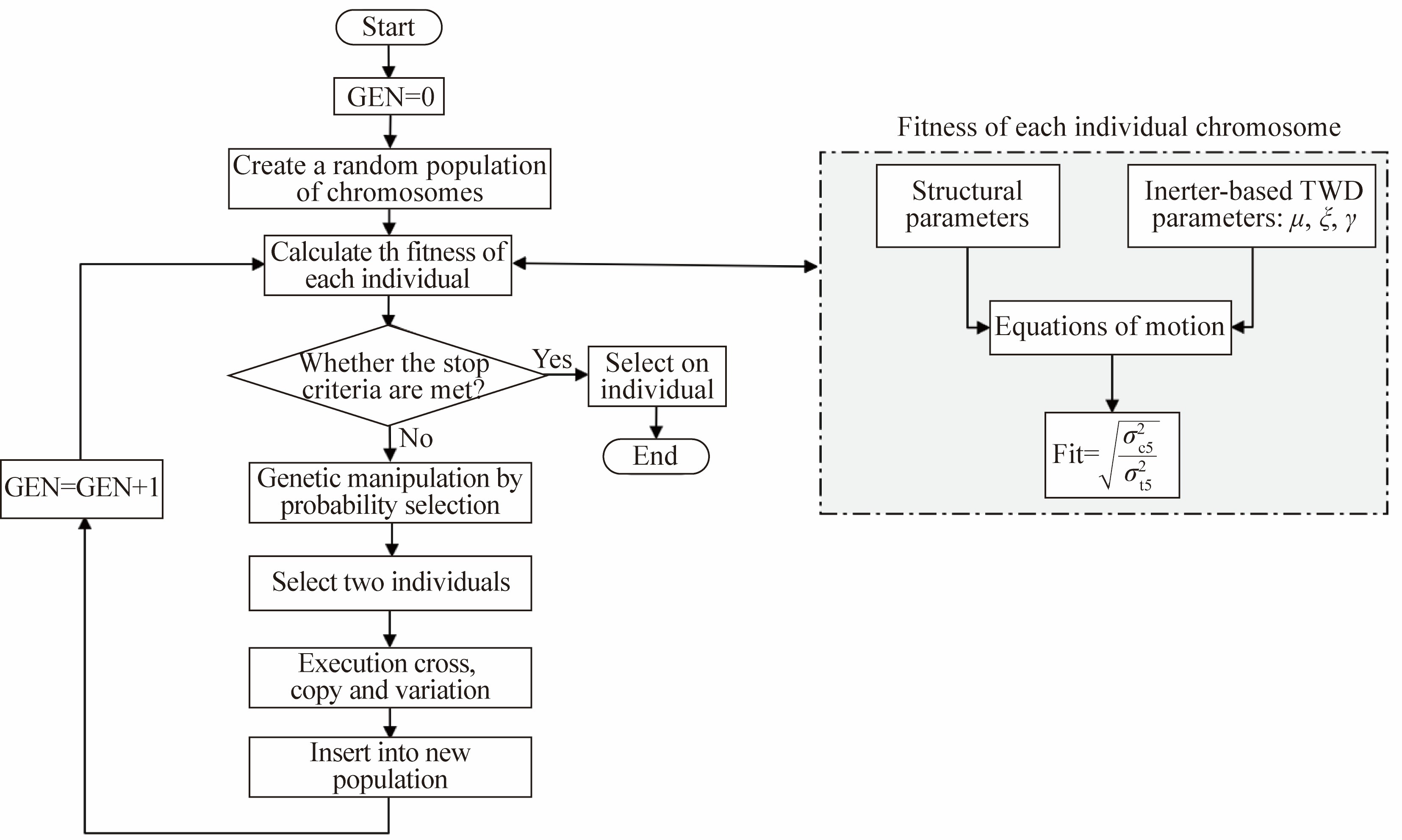
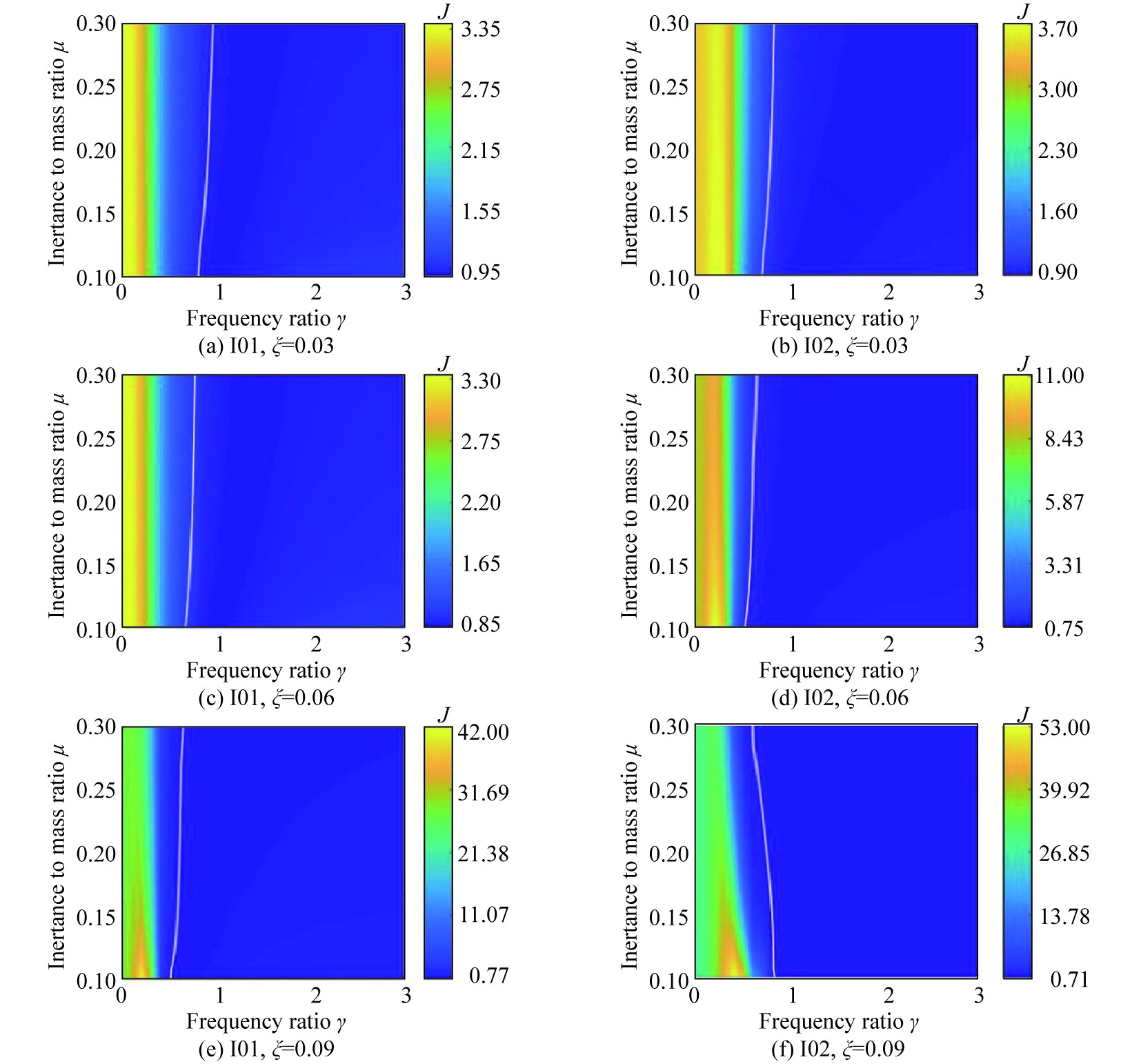
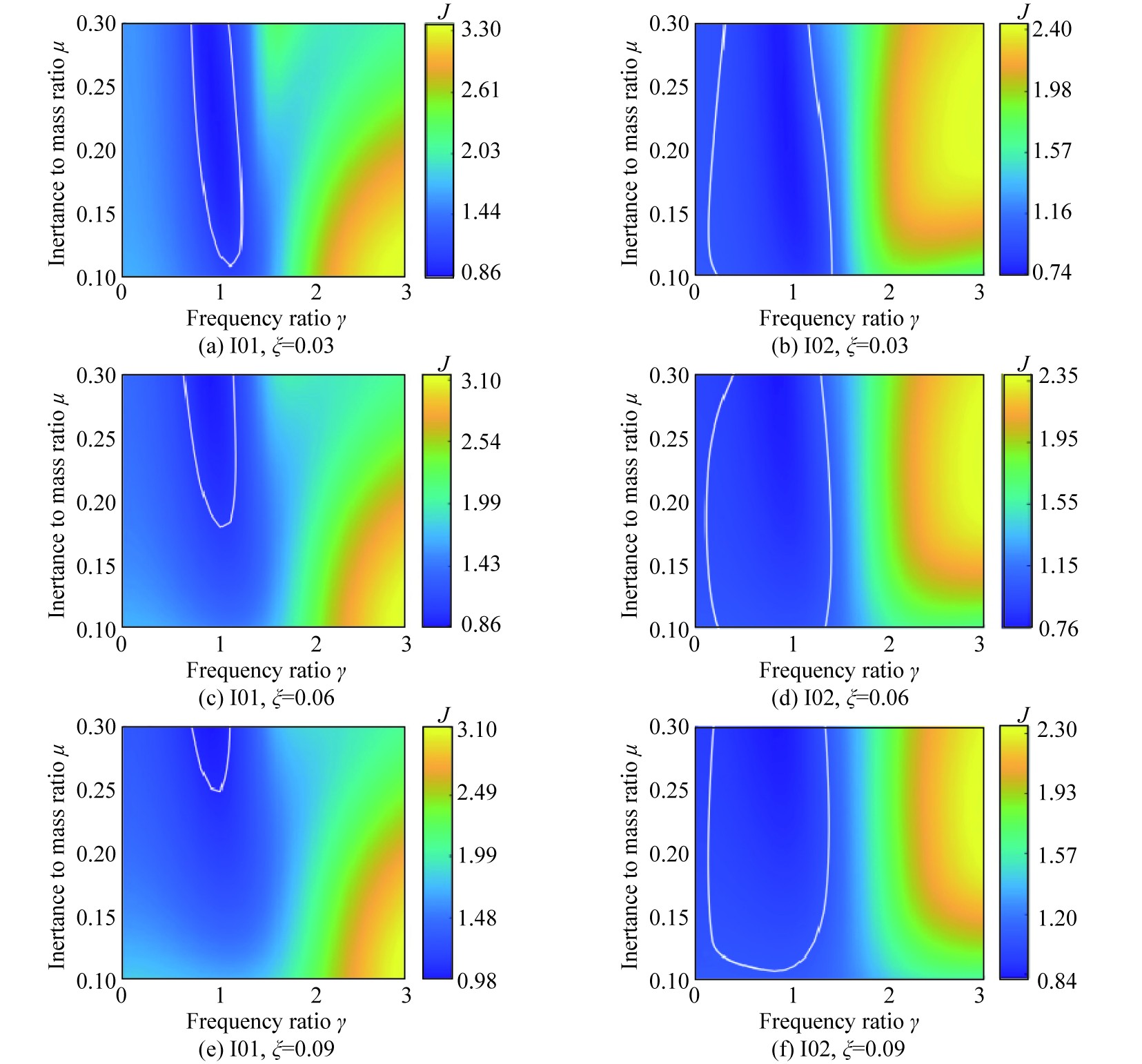
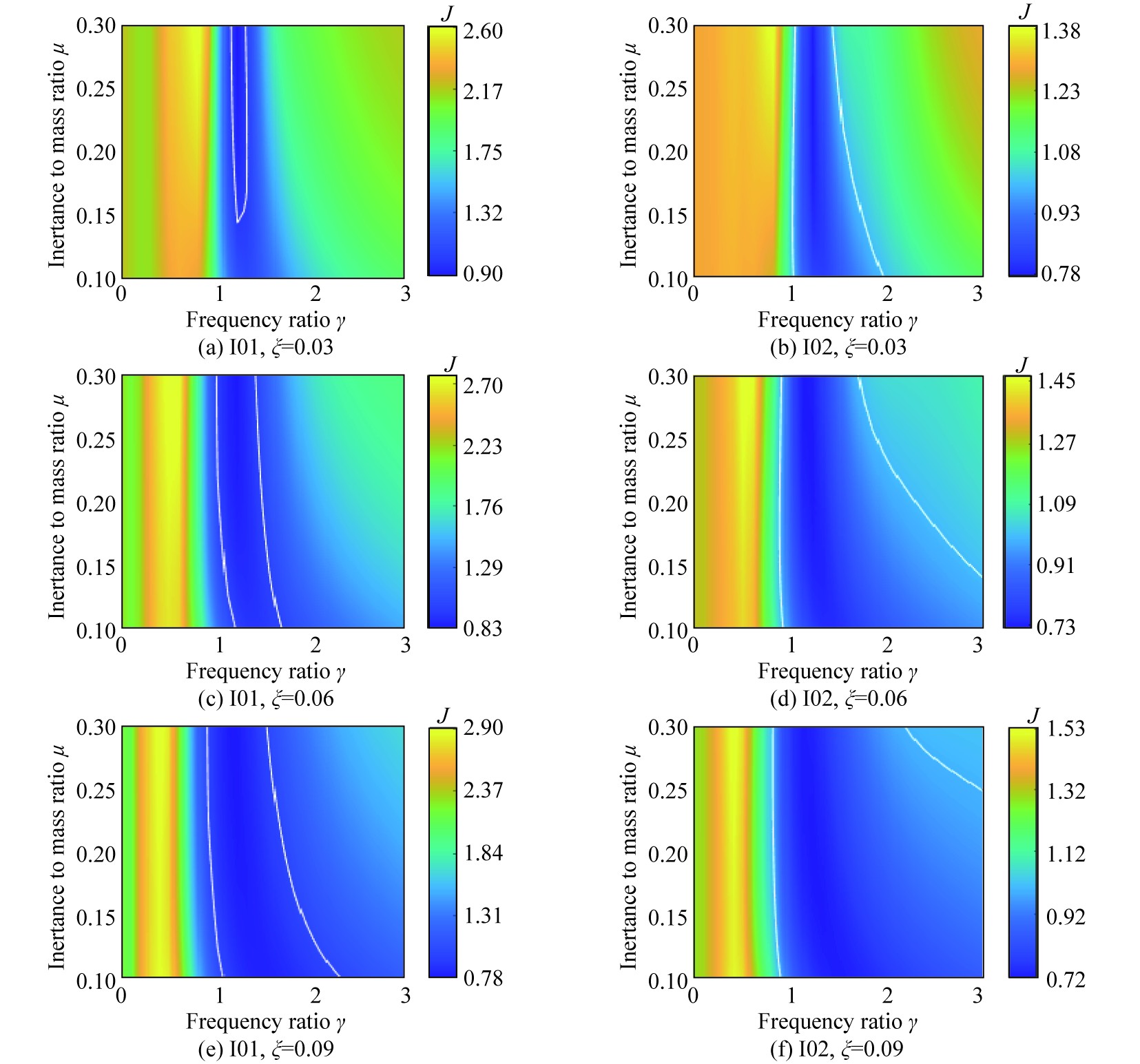
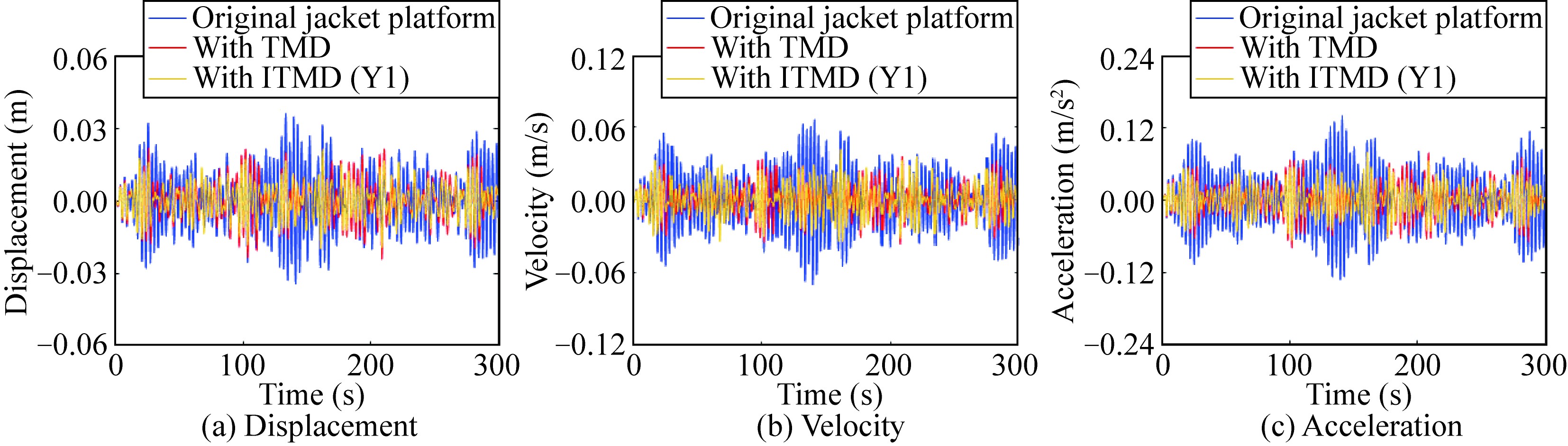
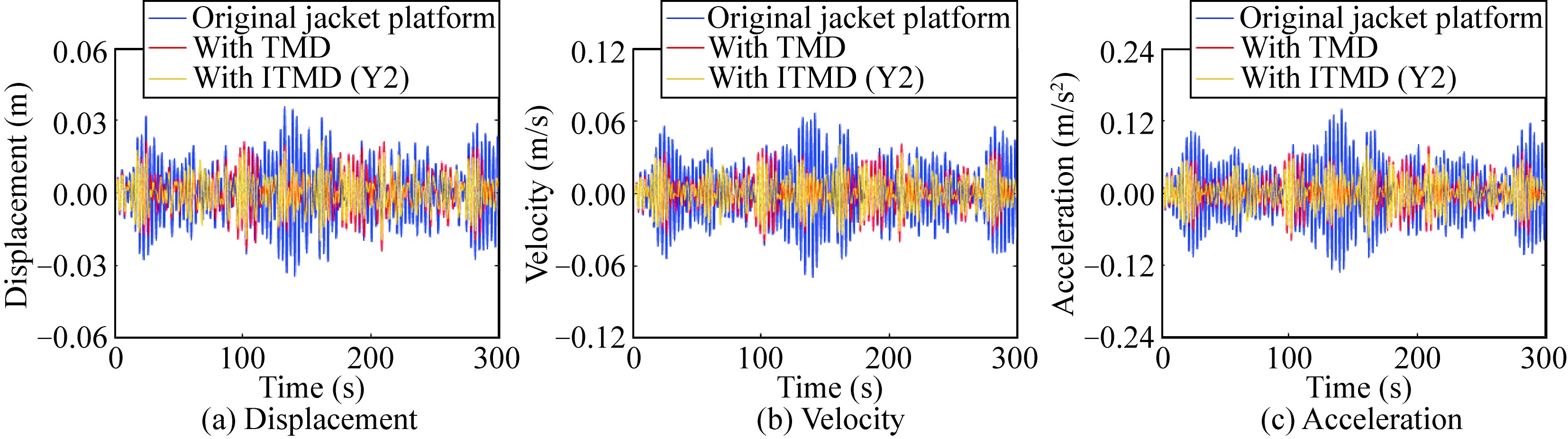
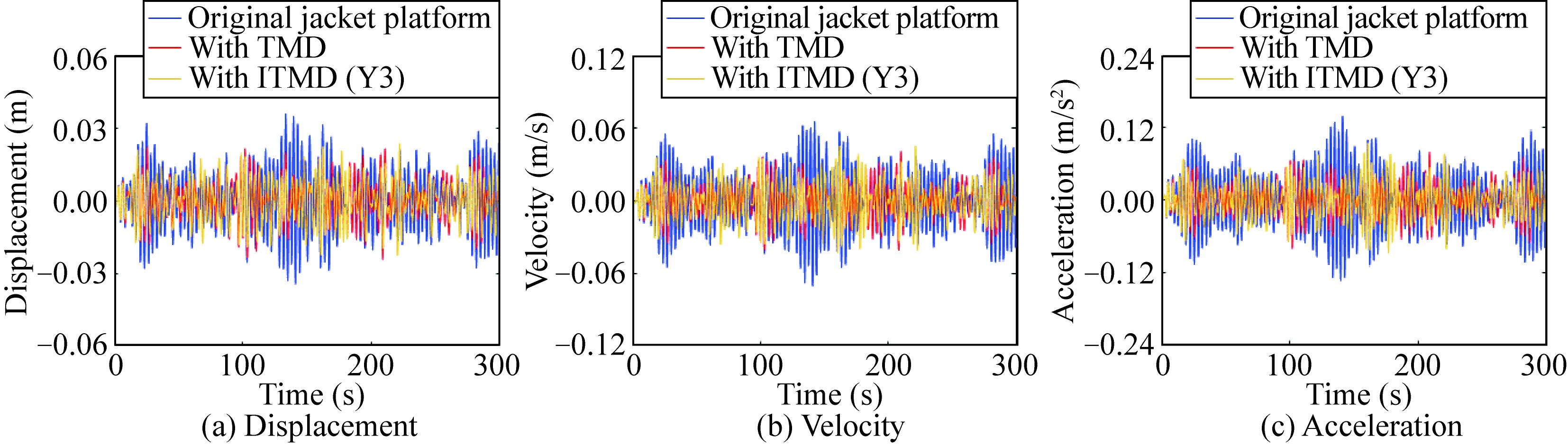
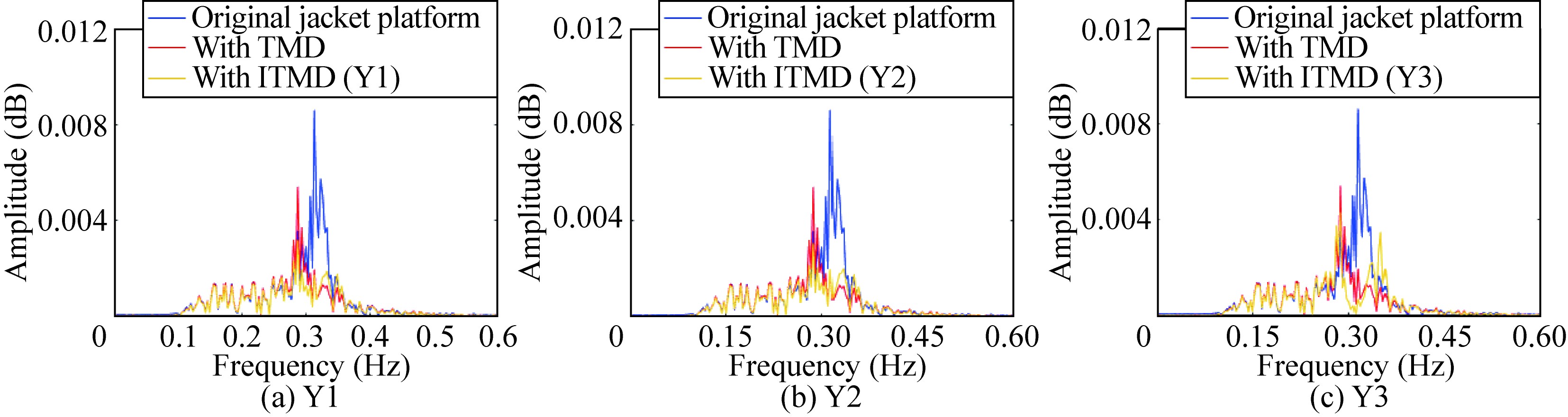
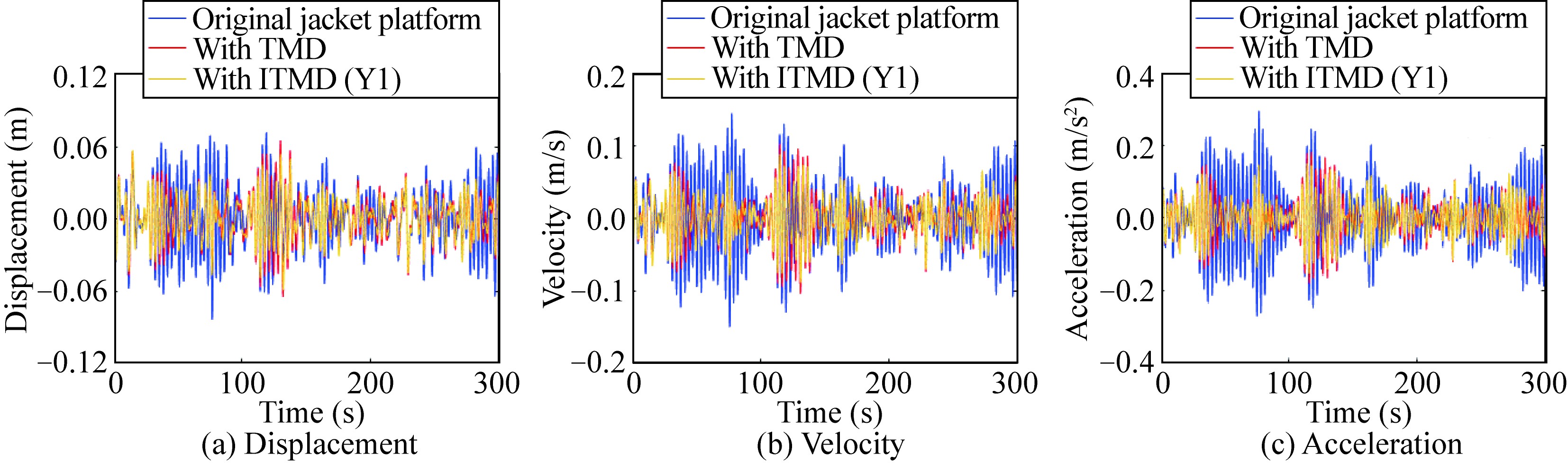
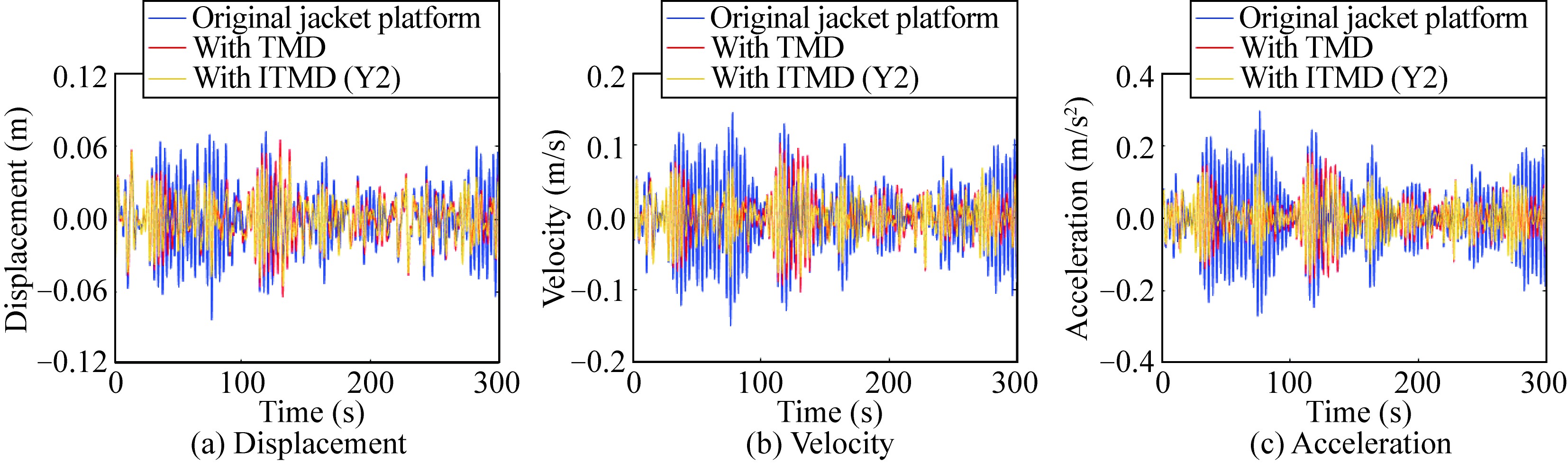
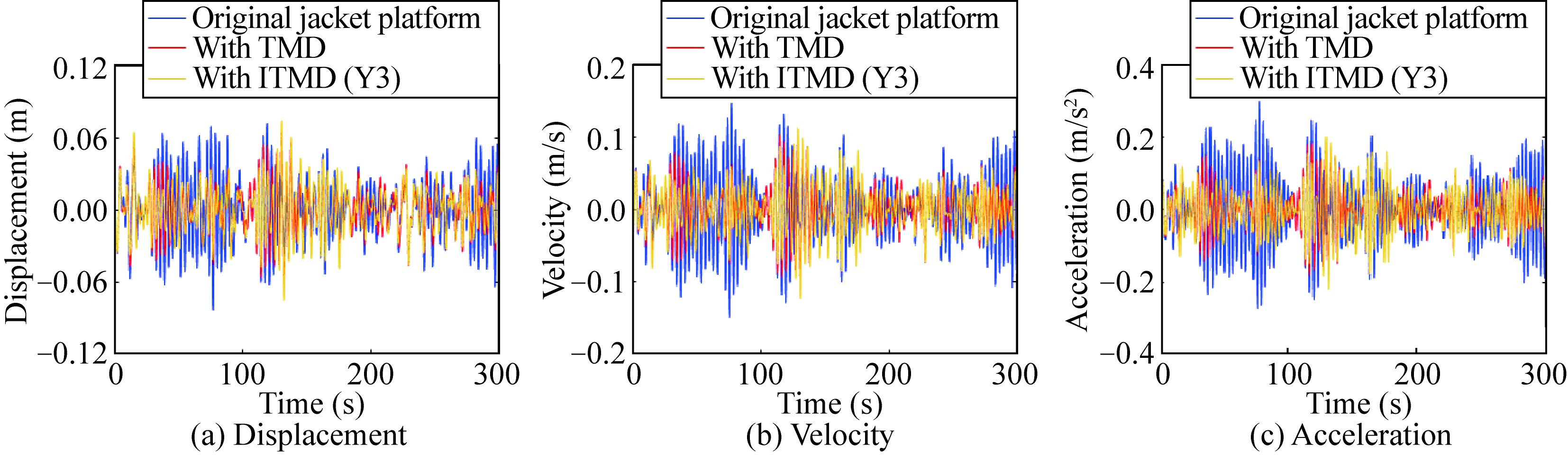
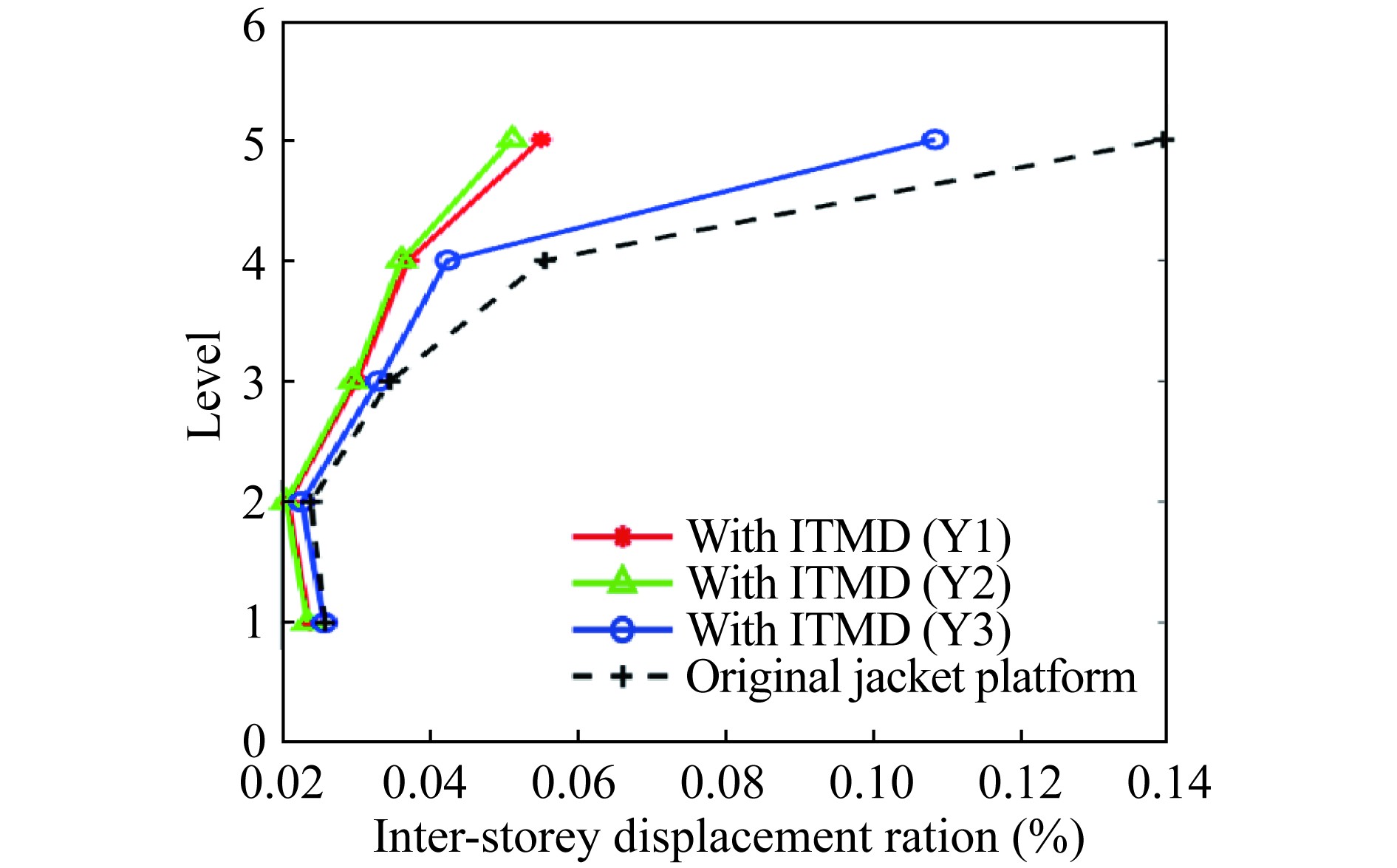
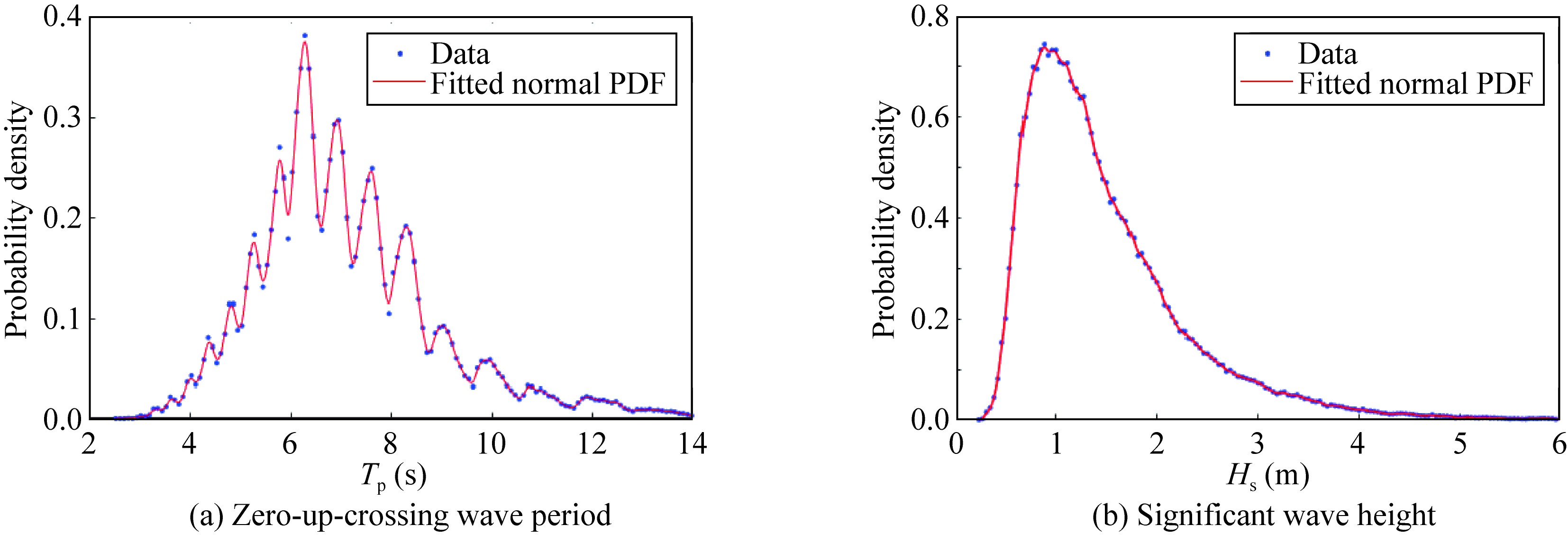
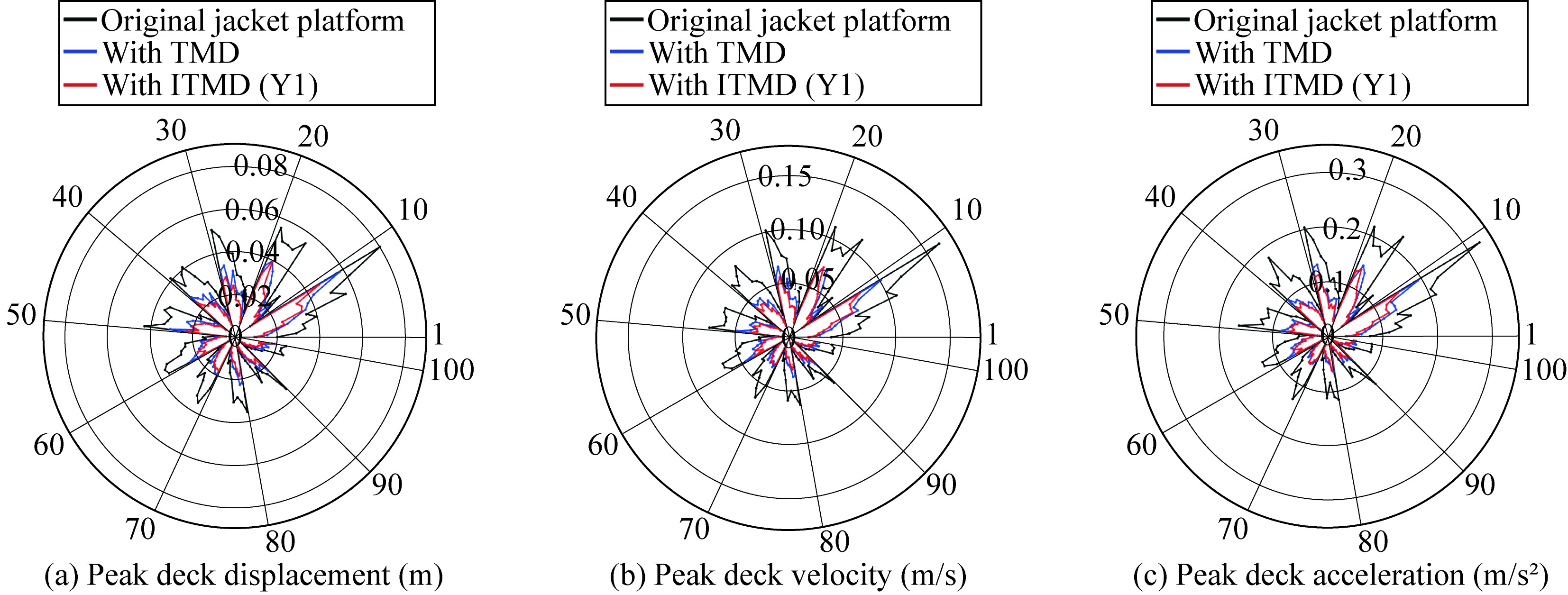
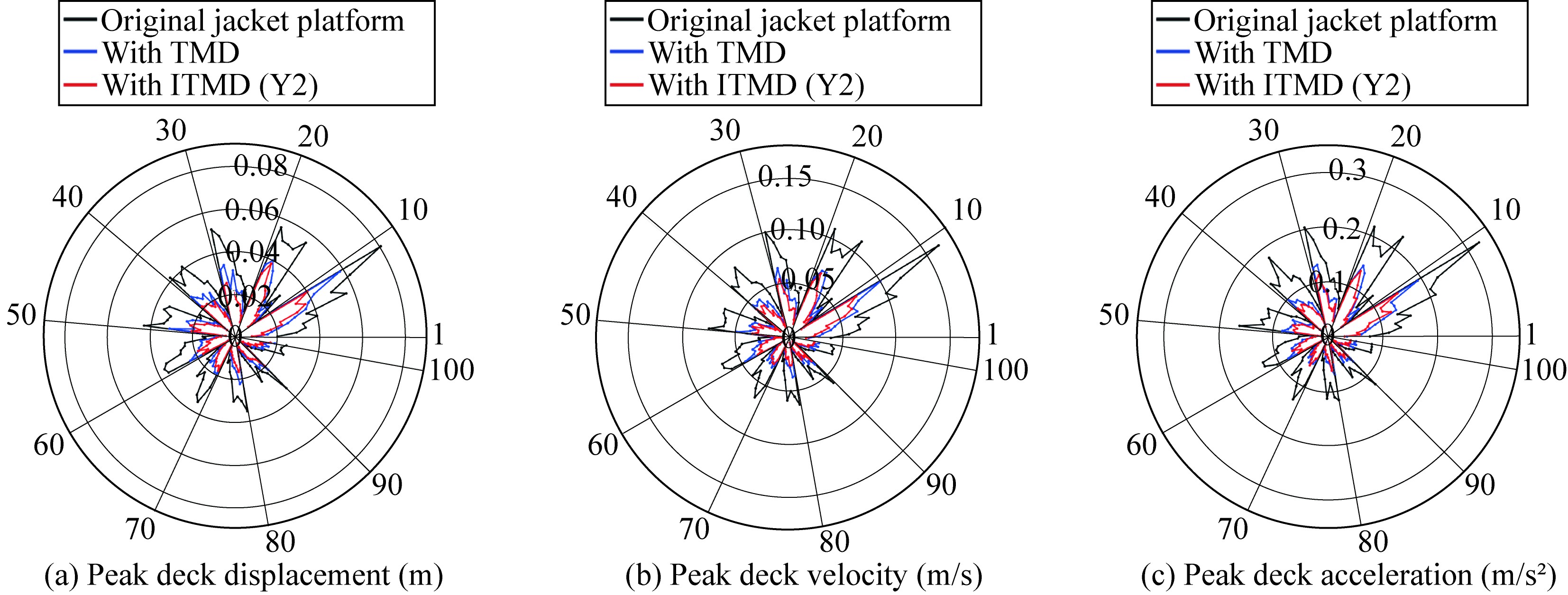
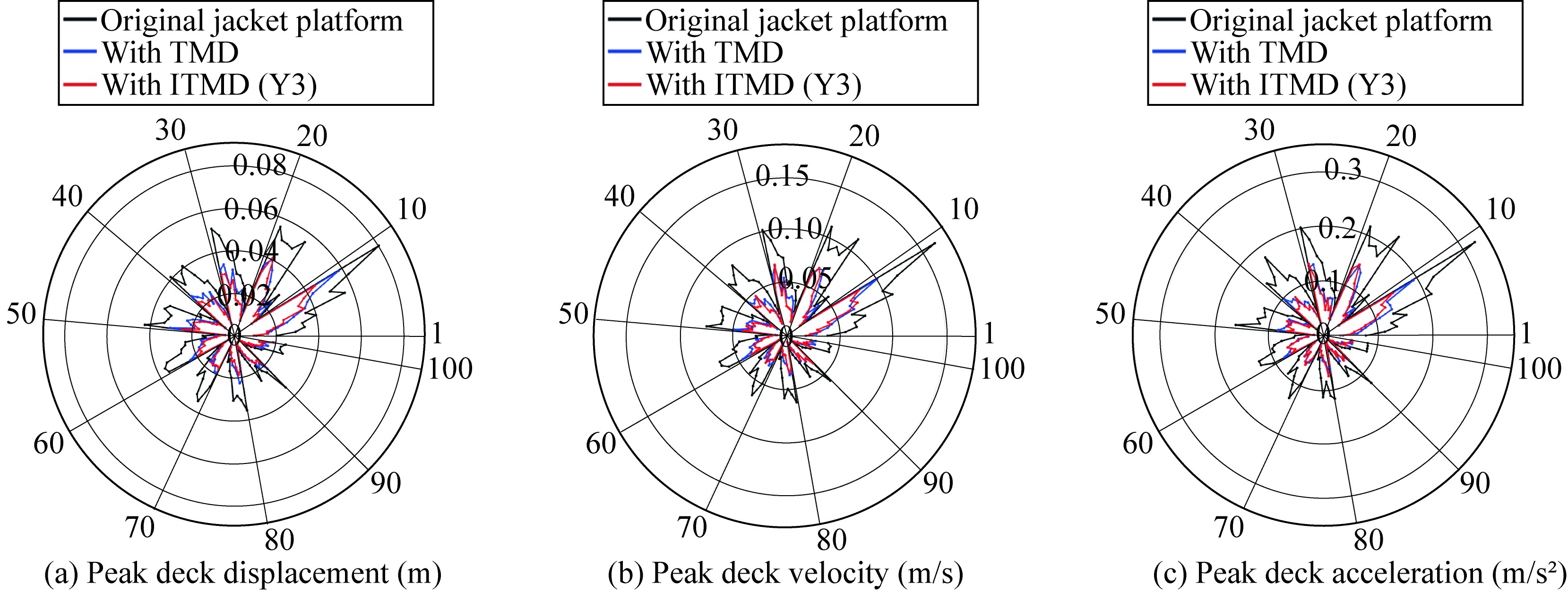
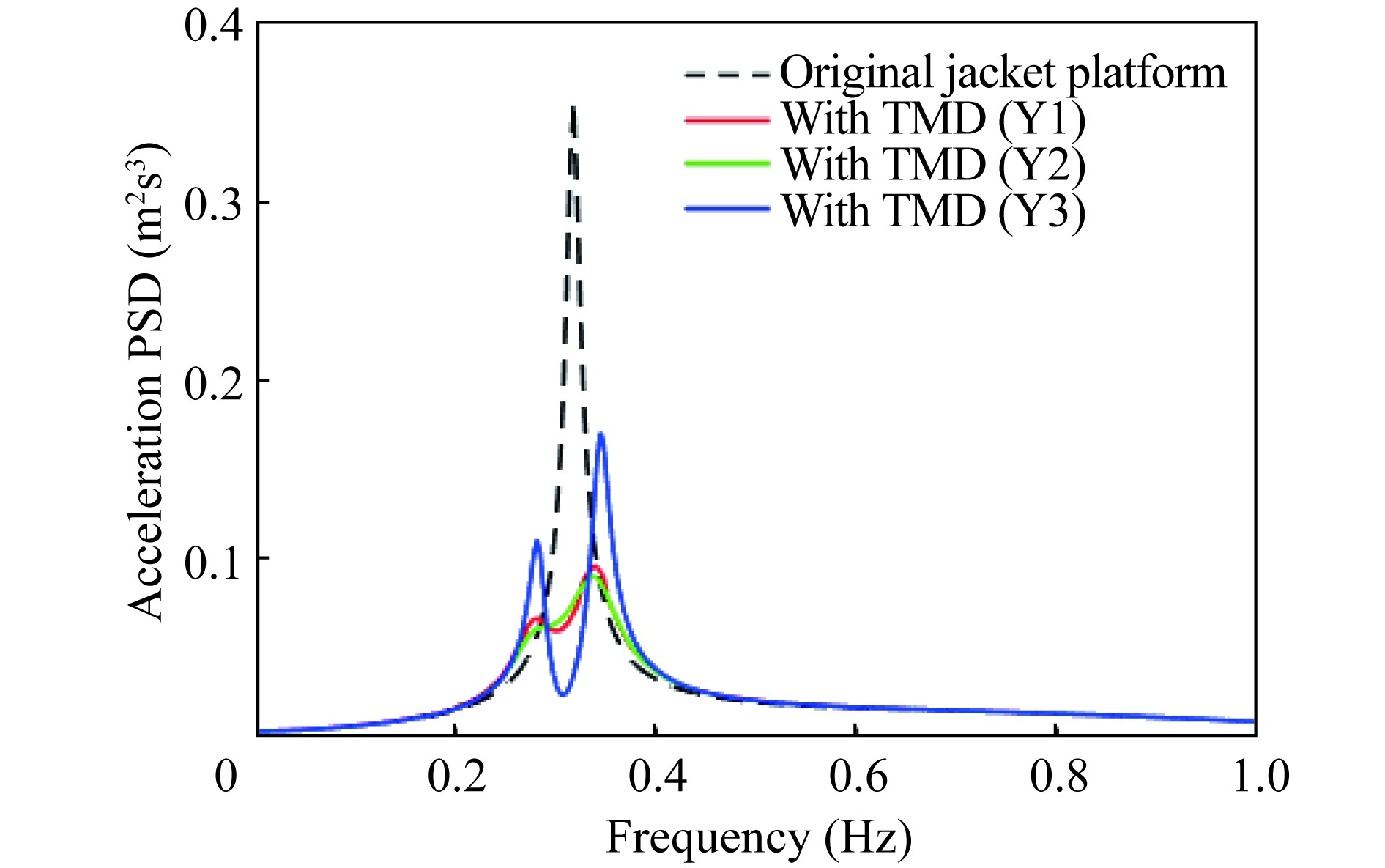
Jacket offshore platforms are commonly subjected to wave loading, which induces undesirable structural vibrations and can lead to integrity issues, including failure or collapse. This study investigates the mitigation of wave-induced vibrations in jacket offshore platforms using inerter-based tuned mass damper (ITMD) systems. A theoretical model of the platform equipped with ITMDs, subjected to realistic wave loading, is developed, and its dynamic responses across various sea states are analytically determined. To ensure practical applicability, a performance-oriented optimization is conducted to identify the optimal ITMD parameters, with deck displacement minimization as the primary objective. A parametric analysis examines the influence of ITMD parameters on the platform’s dynamic behavior. The effectiveness of the ITMD system in suppressing vibrations is assessed and compared directly with that of a conventional tuned mass damper (TMD). Results indicate that the optimized ITMD system outperforms the traditional TMD in reducing both deck displacements and inter-story drifts, achieving superior performance with a lower system mass. The ITMD is therefore concluded to be a promising solution for vibration control in jacket offshore platforms.
Jacket offshore platforms are commonly subjected to wave loading, which induces undesirable structural vibrations and can lead to integrity issues, including failure or collapse. This study investigates the mitigation of wave-induced vibrations in jacket offshore platforms using inerter-based tuned mass damper (ITMD) systems. A theoretical model of the platform equipped with ITMDs, subjected to realistic wave loading, is developed, and its dynamic responses across various sea states are analytically determined. To ensure practical applicability, a performance-oriented optimization is conducted to identify the optimal ITMD parameters, with deck displacement minimization as the primary objective. A parametric analysis examines the influence of ITMD parameters on the platform’s dynamic behavior. The effectiveness of the ITMD system in suppressing vibrations is assessed and compared directly with that of a conventional tuned mass damper (TMD). Results indicate that the optimized ITMD system outperforms the traditional TMD in reducing both deck displacements and inter-story drifts, achieving superior performance with a lower system mass. The ITMD is therefore concluded to be a promising solution for vibration control in jacket offshore platforms.
2026, 40(3)
:681-694.
doi: 10.1007/s13344-026-0052-y
Abstract:
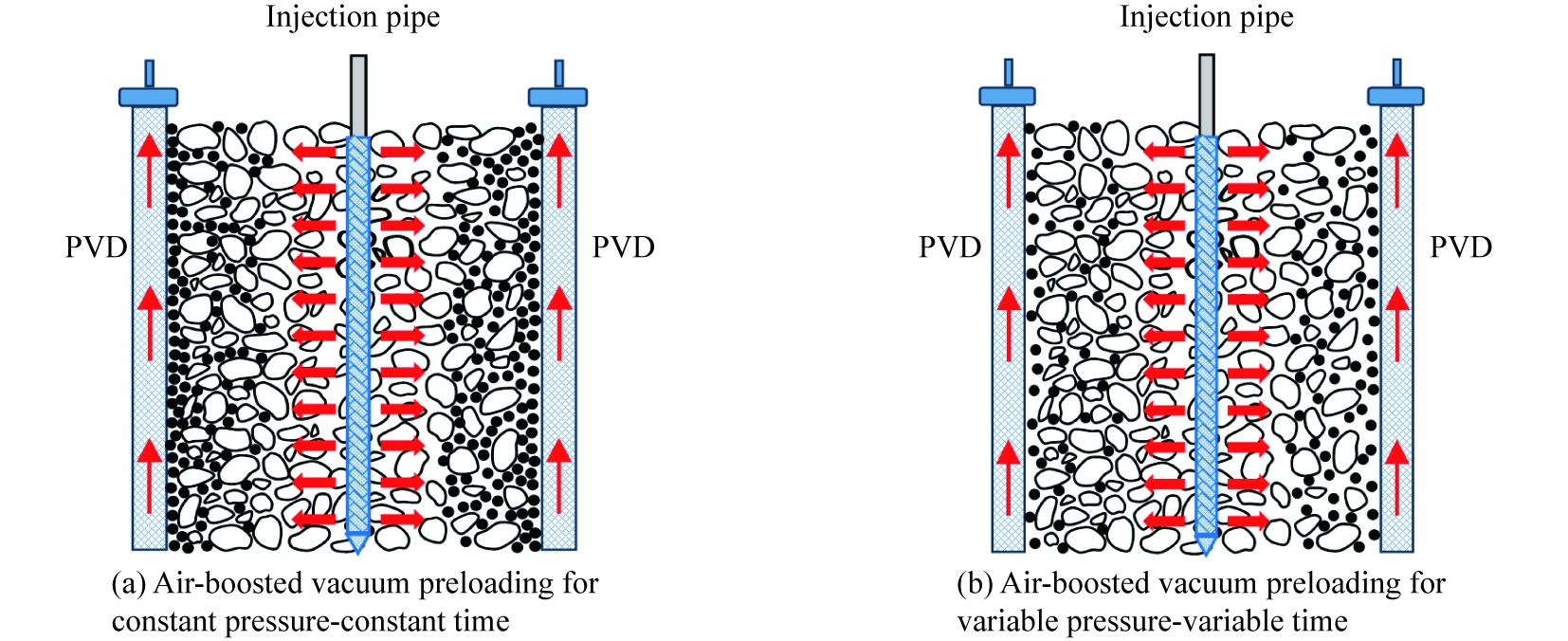
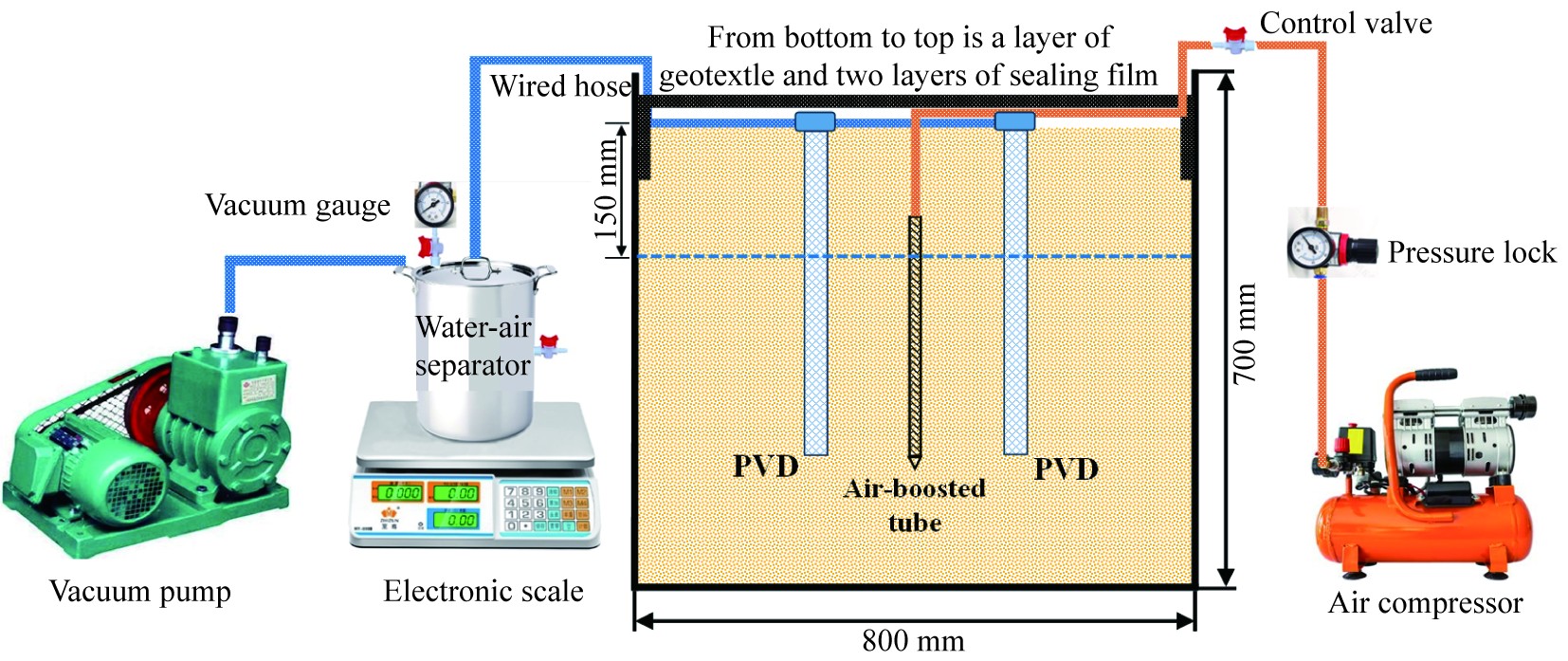
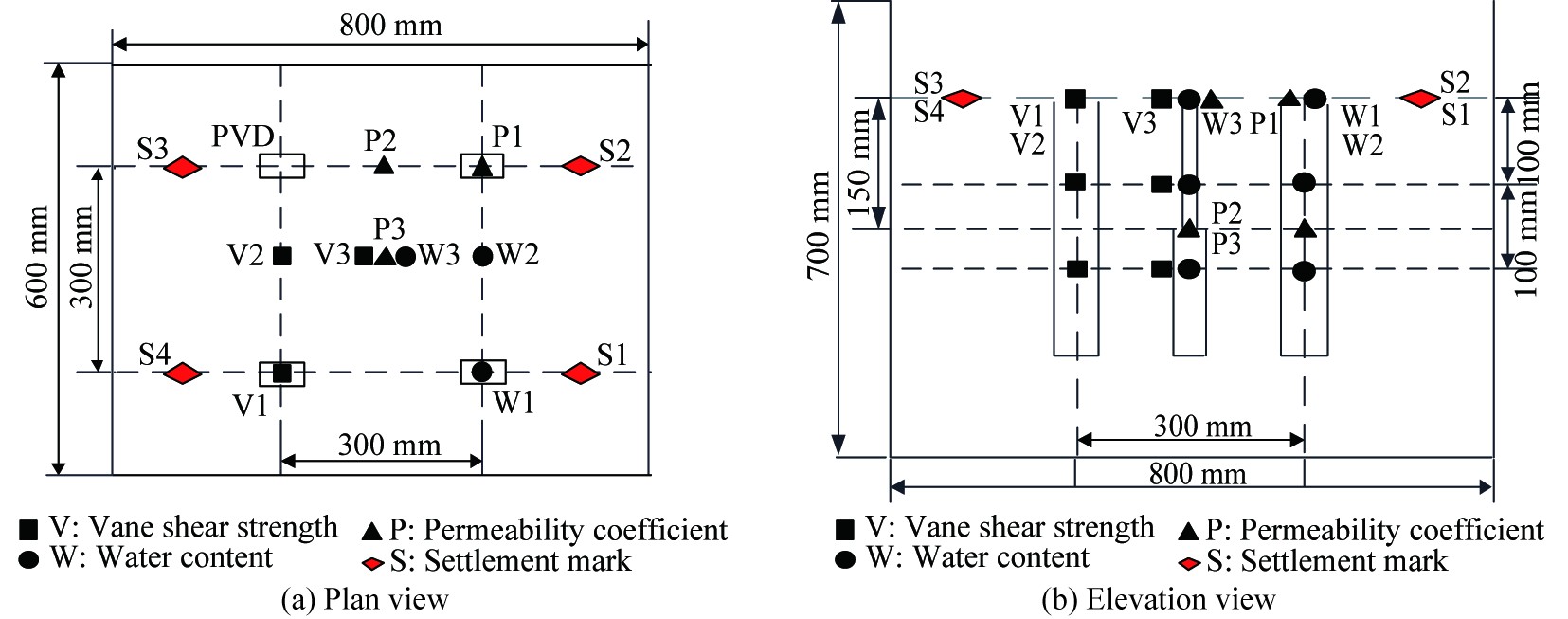
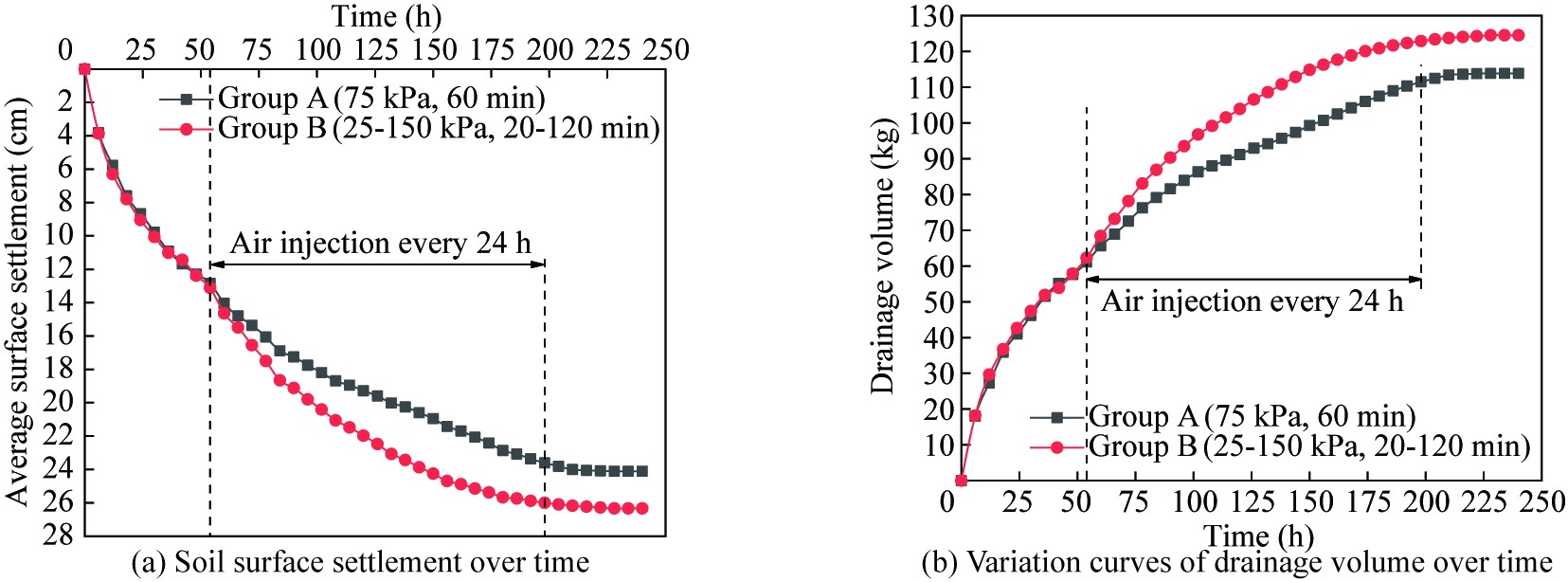
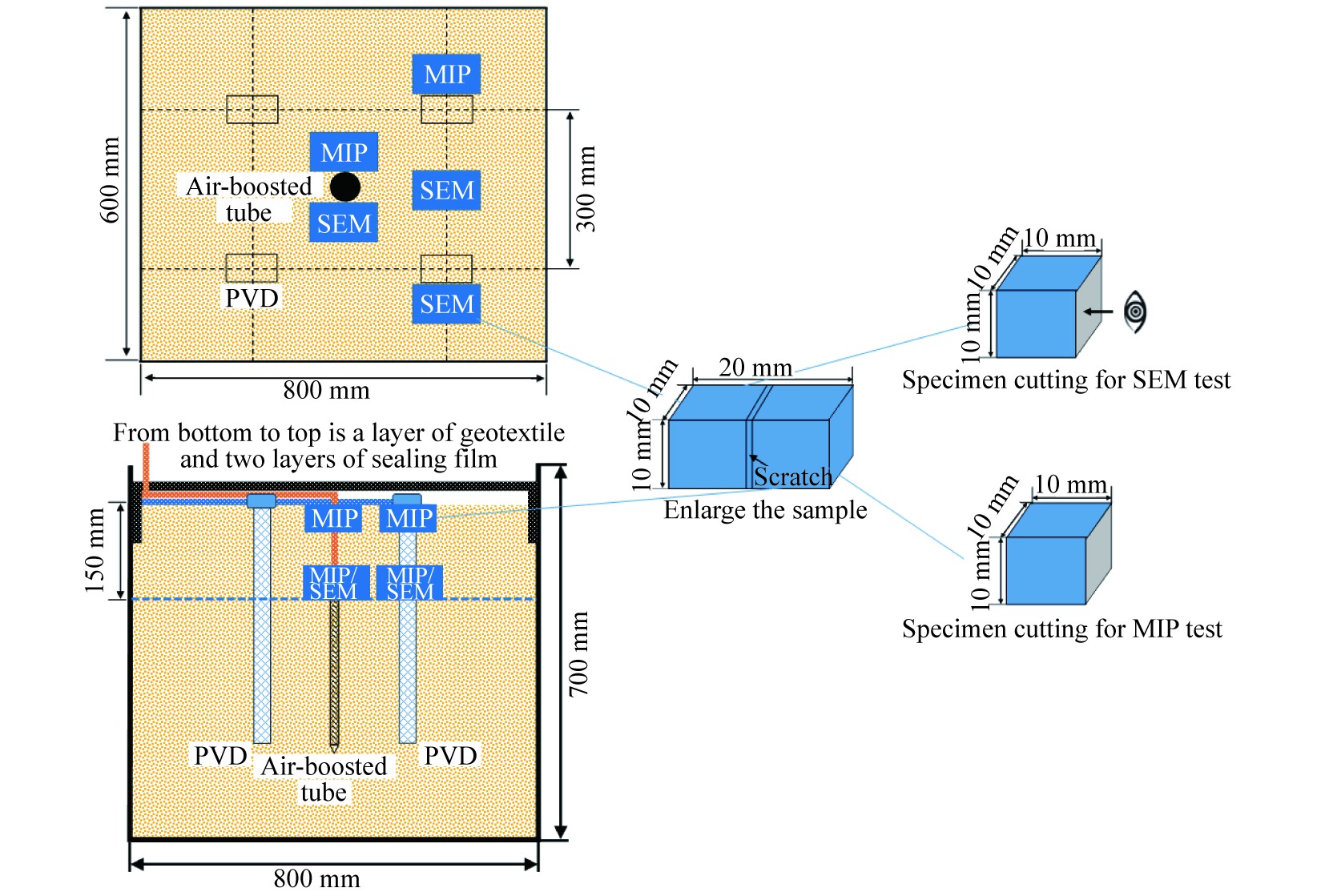
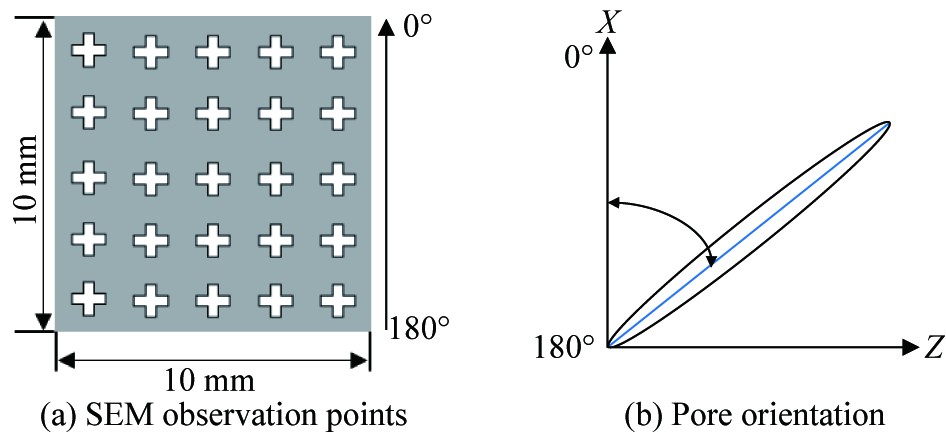
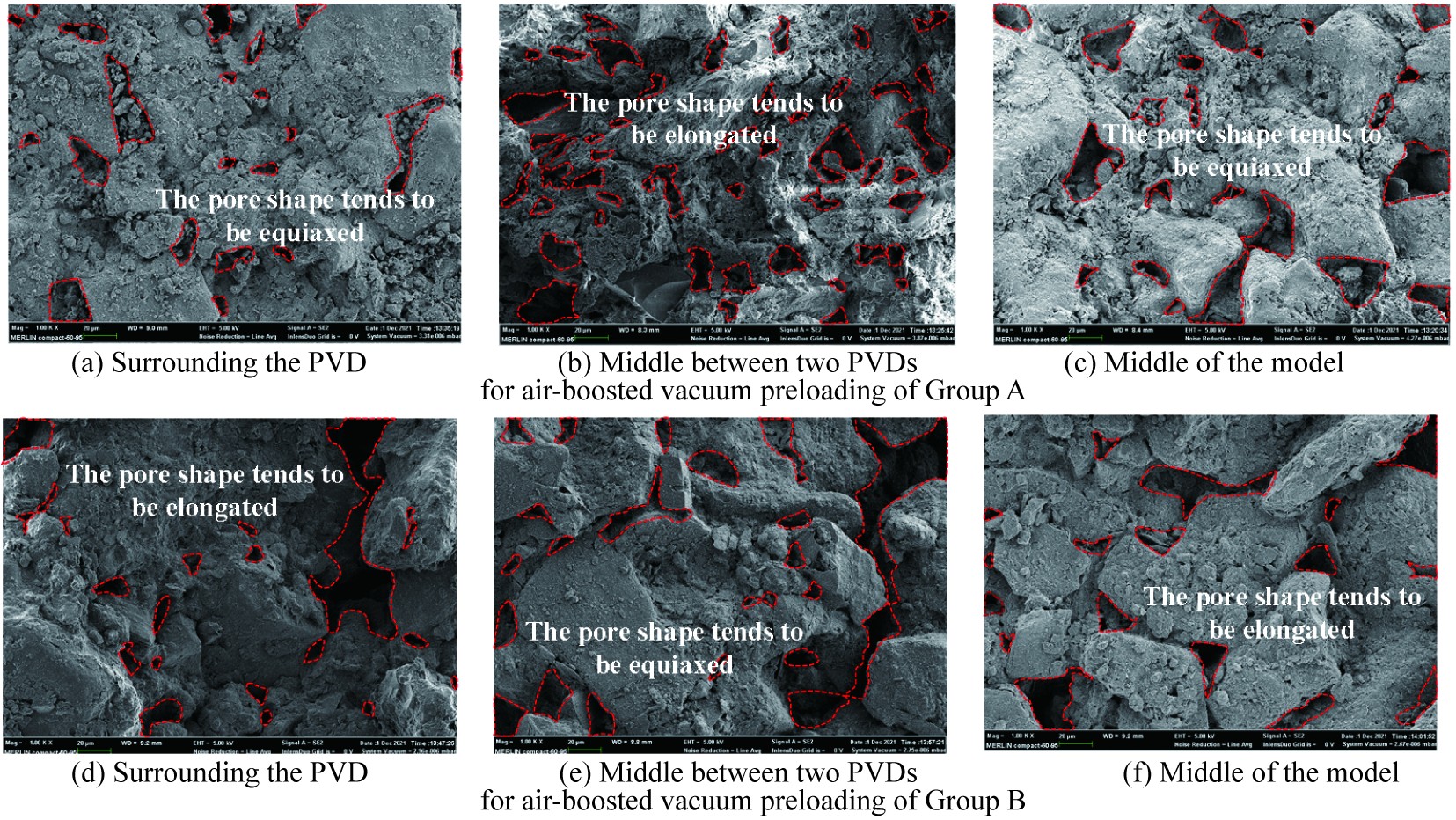
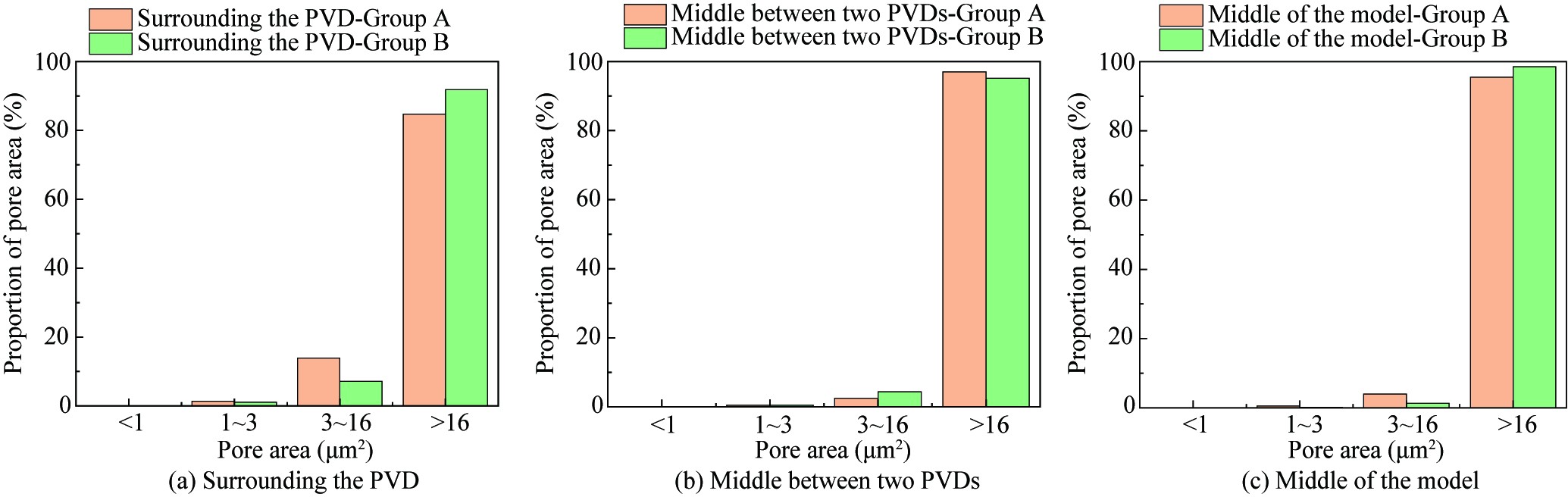
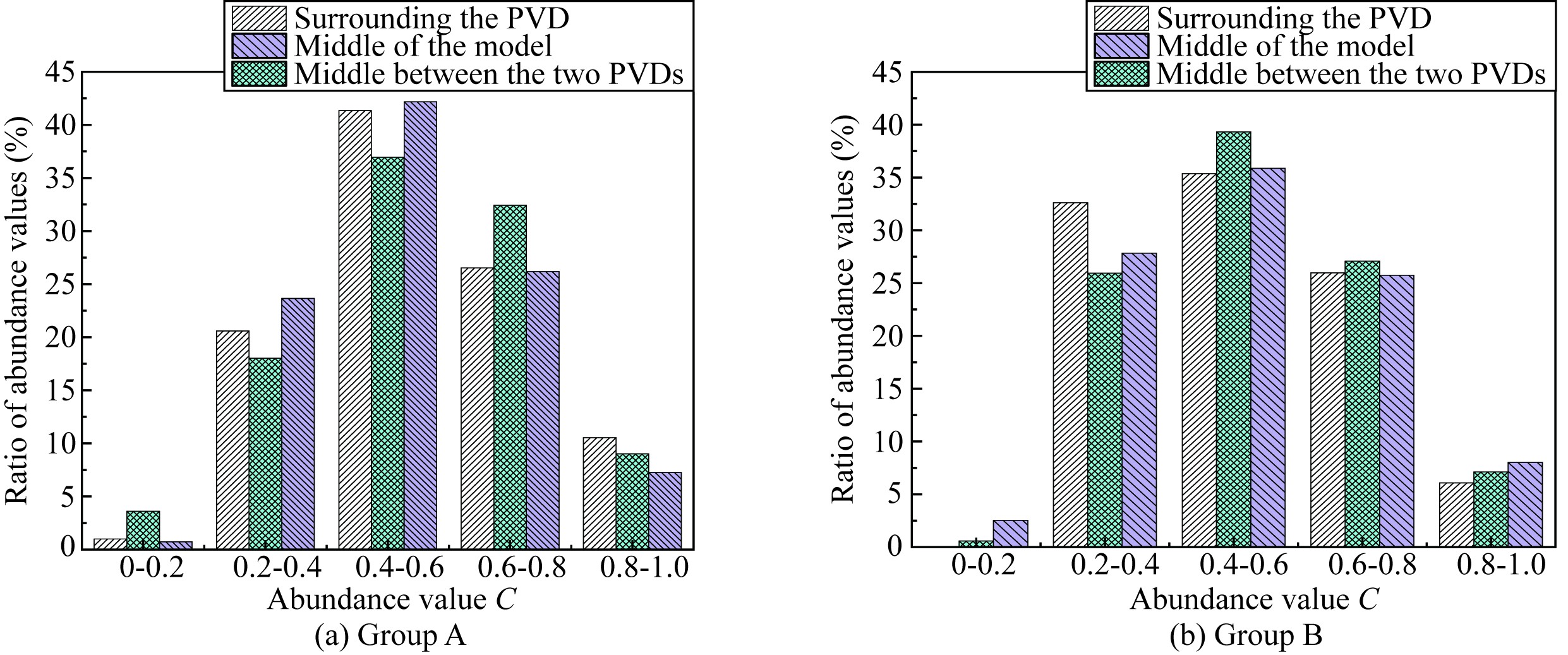
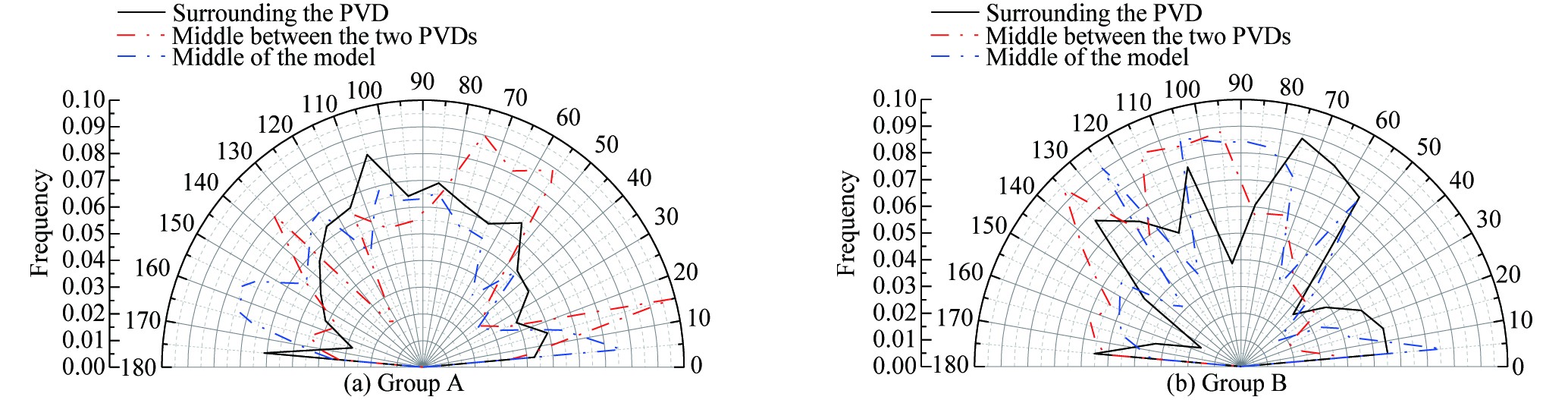
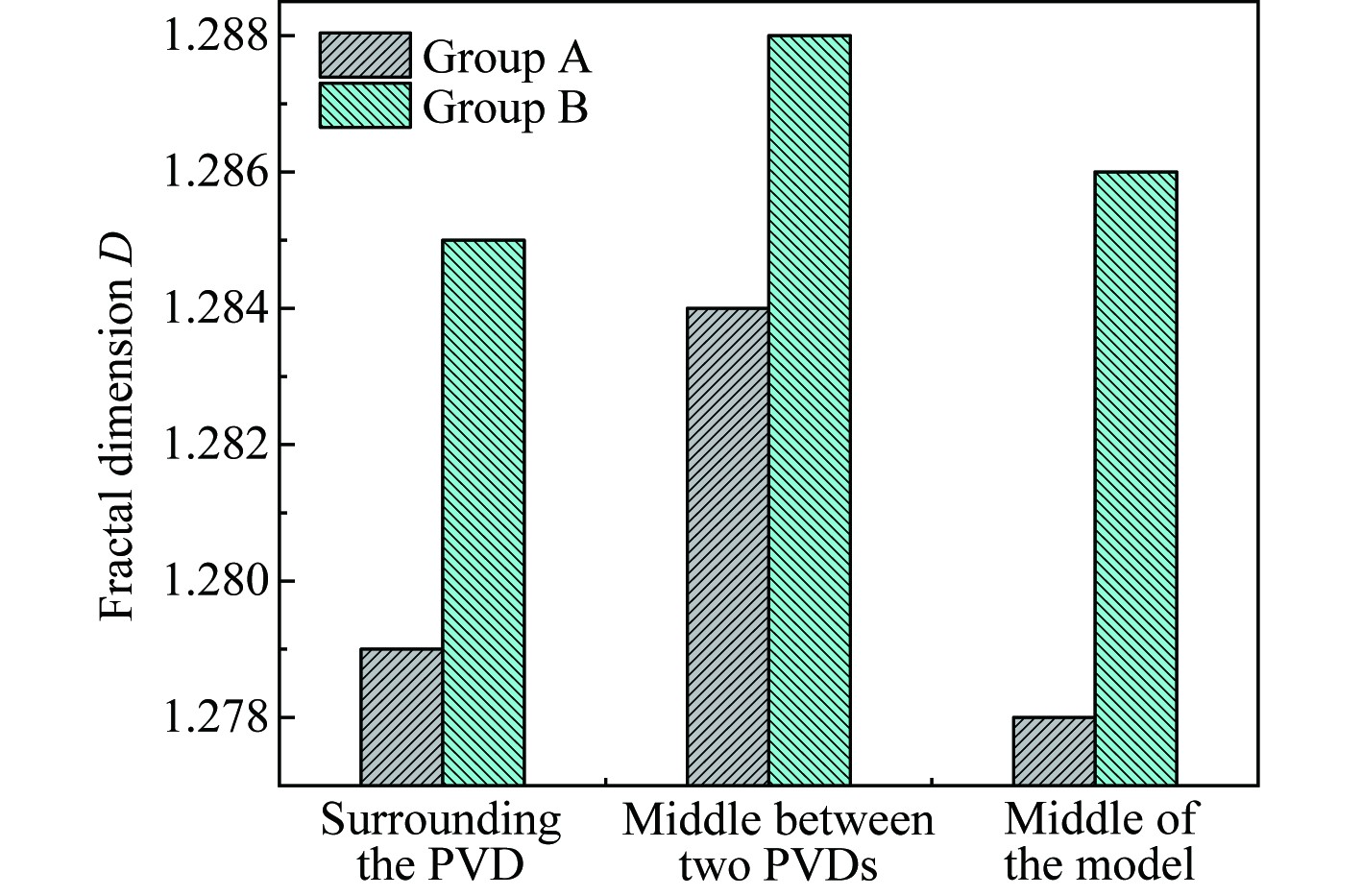
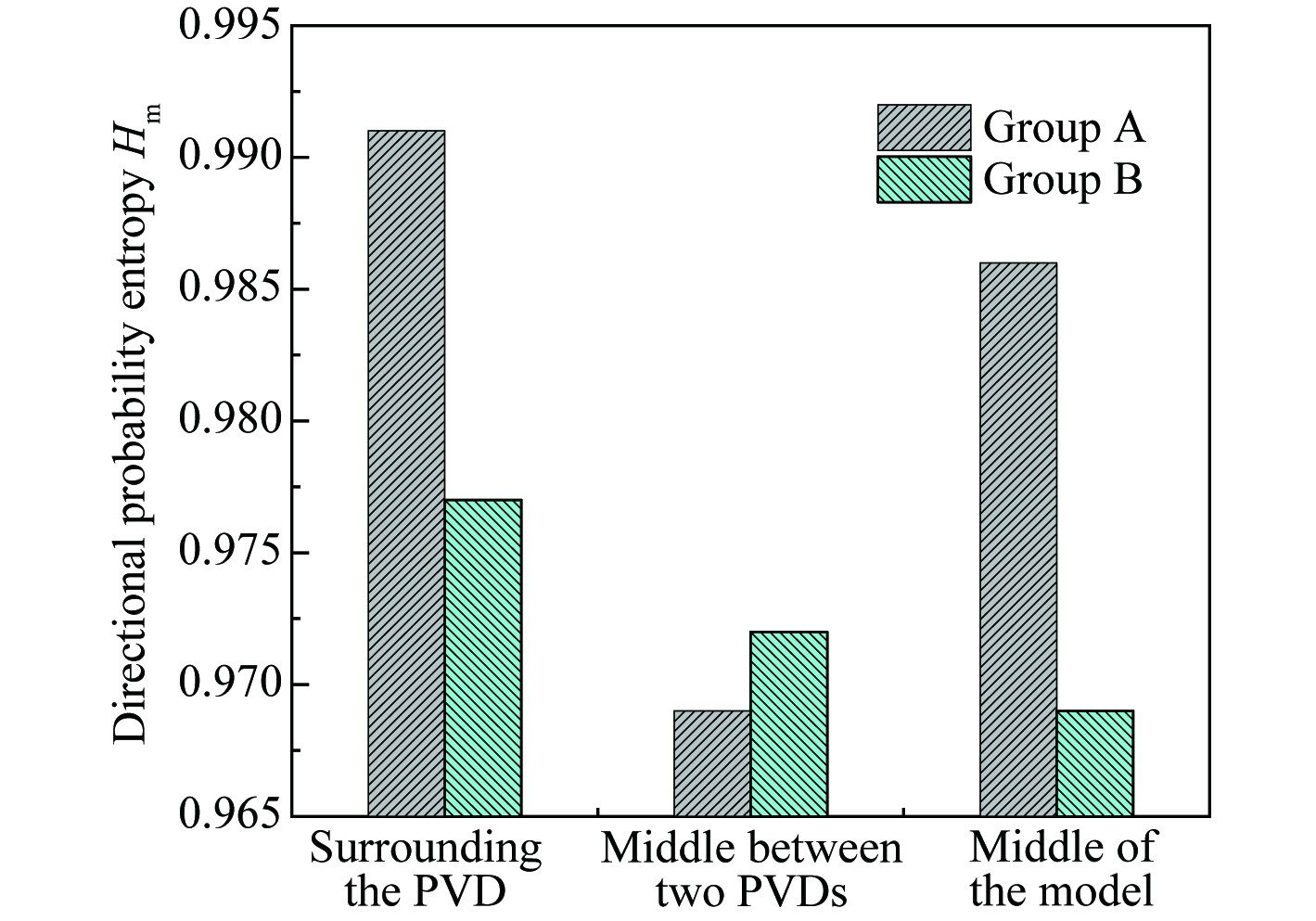
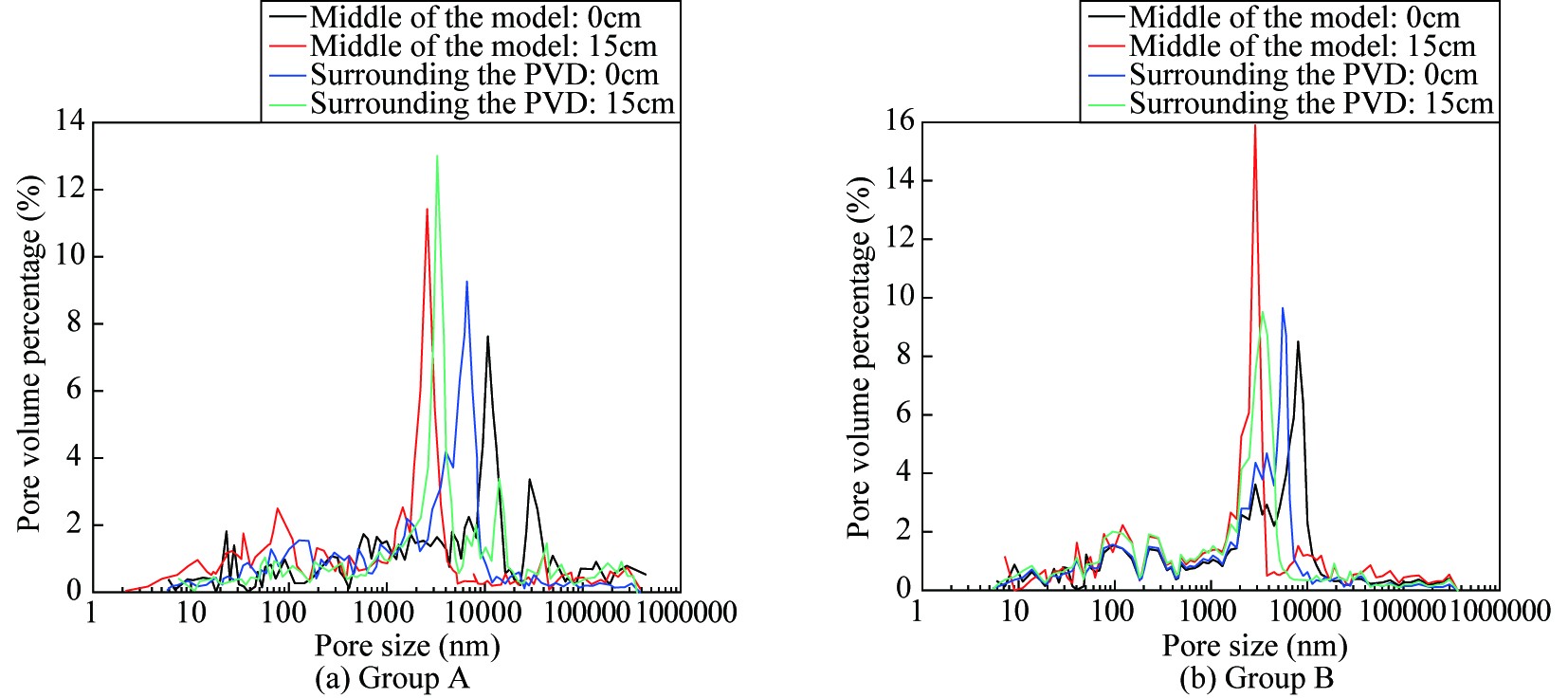
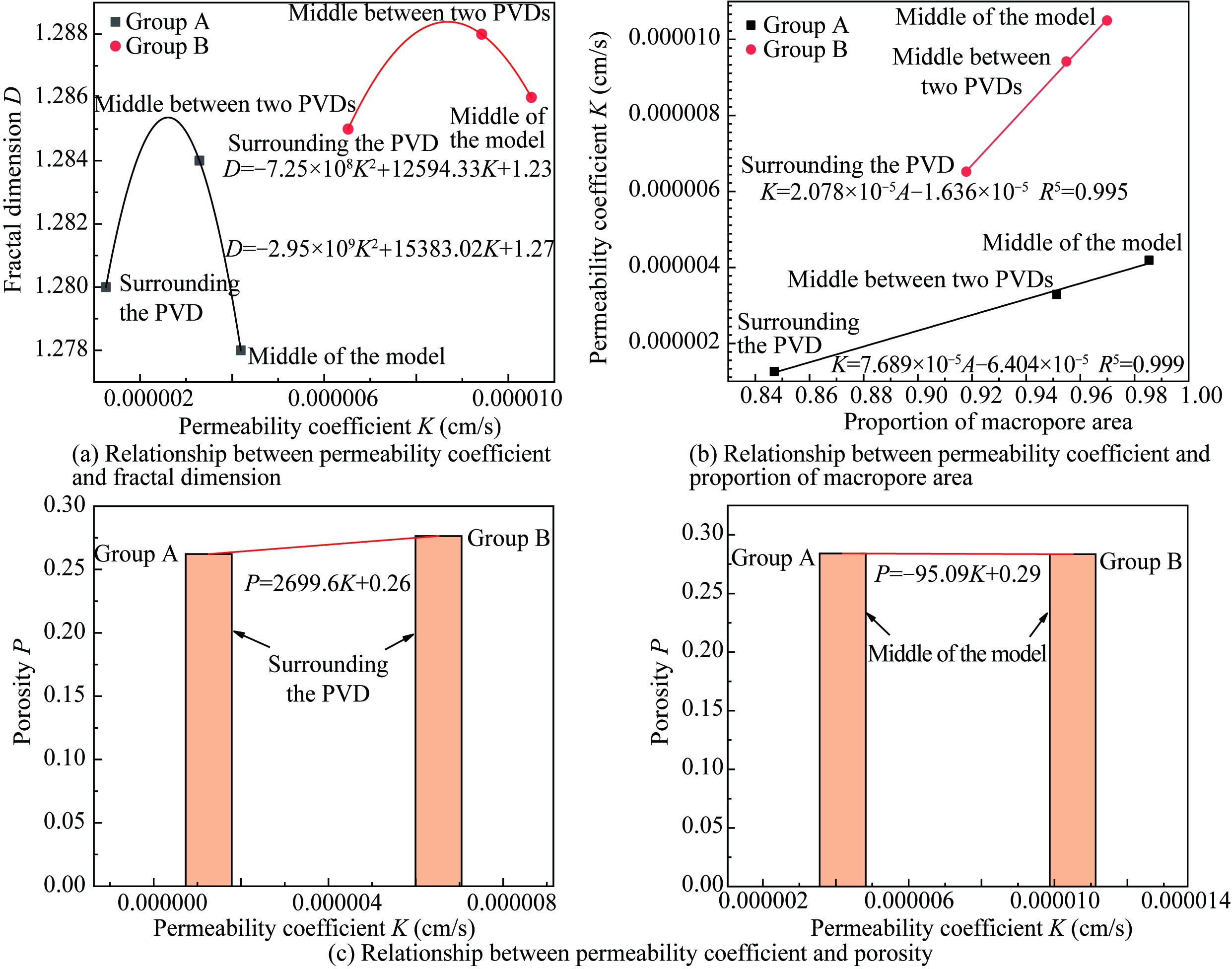
Air-boosted vacuum preloading is extensively utilized in soft grounds formed by marine dredging. While most research focuses on macroscopic characteristics such as settlement changes, water discharge, and undrained shear strength, these properties are significantly influenced by microscopic parameters. This study analyzes the reinforcement effect of air-boosted vacuum preloading on marine clay ground from a microscopic perspective. Through model tests of constant pressure-constant time (Group A) and variable pressure-variable time (Group B) air-boosted vacuum preloading reinforcement, the microstructure pore characteristics of marine clay are quantitatively investigated. The research examines pore area development, abundance, orientation angle, orientation probability entropy, average aperture fractal dimension, and size distribution using scanning electron microscopy and mercury intrusion porosimetry tests. Results indicate that Group B treatment demonstrated superior effectiveness compared with Group A. Group B enhanced the proportion of mesopore area, macropore area, and fractal dimension of marine clay, indicating rougher pore morphology curves and more irregular morphology. The average abundance value decreased by 3.29%−5.46%, suggesting elongation of pore shapes. Analysis of the correlation between permeability coefficient and microscopic parameters revealed relationships between fractal dimension, macropore area, and porosity ratio. The fractal dimension’s influence on permeability coefficient exhibits a critical threshold value, while permeability coefficient increases linearly with macropore area proportion and porosity.
Air-boosted vacuum preloading is extensively utilized in soft grounds formed by marine dredging. While most research focuses on macroscopic characteristics such as settlement changes, water discharge, and undrained shear strength, these properties are significantly influenced by microscopic parameters. This study analyzes the reinforcement effect of air-boosted vacuum preloading on marine clay ground from a microscopic perspective. Through model tests of constant pressure-constant time (Group A) and variable pressure-variable time (Group B) air-boosted vacuum preloading reinforcement, the microstructure pore characteristics of marine clay are quantitatively investigated. The research examines pore area development, abundance, orientation angle, orientation probability entropy, average aperture fractal dimension, and size distribution using scanning electron microscopy and mercury intrusion porosimetry tests. Results indicate that Group B treatment demonstrated superior effectiveness compared with Group A. Group B enhanced the proportion of mesopore area, macropore area, and fractal dimension of marine clay, indicating rougher pore morphology curves and more irregular morphology. The average abundance value decreased by 3.29%−5.46%, suggesting elongation of pore shapes. Analysis of the correlation between permeability coefficient and microscopic parameters revealed relationships between fractal dimension, macropore area, and porosity ratio. The fractal dimension’s influence on permeability coefficient exhibits a critical threshold value, while permeability coefficient increases linearly with macropore area proportion and porosity.
2026, 40(3)
:695-703.
doi: 10.1007/s13344-026-0069-2
Abstract:
Current marine-engineering and ocean-dynamics studies have been very active. On account of marine engineering, ocean dynamics, fluid mechanics, plasma physics and nonlinear optics, we hereby study a (2+1)-dimensional generalized variable-coefficient Date-Jimbo-Kashiwara-Miwa equation, for which we build up certain auto-Bäcklund transformation via a noncharacteristic movable singular manifold, solitonic solutions, analytic solutions as well as similarity reductions. As for the wave amplitude, our results depend on the variable coefficients, some of which denote the dispersion in space and space-time, separately, while some of which are caused by the geometric or physical inhomogeneities, such as the changing radius and medium density. No variable-coefficient constraints are involved in the analysis. This work may be of some theoretical use in assisting the future studies in marine engineering, ocean dynamics, fluid mechanics, plasma physics and nonlinear optics.
Current marine-engineering and ocean-dynamics studies have been very active. On account of marine engineering, ocean dynamics, fluid mechanics, plasma physics and nonlinear optics, we hereby study a (2+1)-dimensional generalized variable-coefficient Date-Jimbo-Kashiwara-Miwa equation, for which we build up certain auto-Bäcklund transformation via a noncharacteristic movable singular manifold, solitonic solutions, analytic solutions as well as similarity reductions. As for the wave amplitude, our results depend on the variable coefficients, some of which denote the dispersion in space and space-time, separately, while some of which are caused by the geometric or physical inhomogeneities, such as the changing radius and medium density. No variable-coefficient constraints are involved in the analysis. This work may be of some theoretical use in assisting the future studies in marine engineering, ocean dynamics, fluid mechanics, plasma physics and nonlinear optics.
2026, 40(3)
:704-712.
doi: 10.1007/s13344-026-0053-x
Abstract:
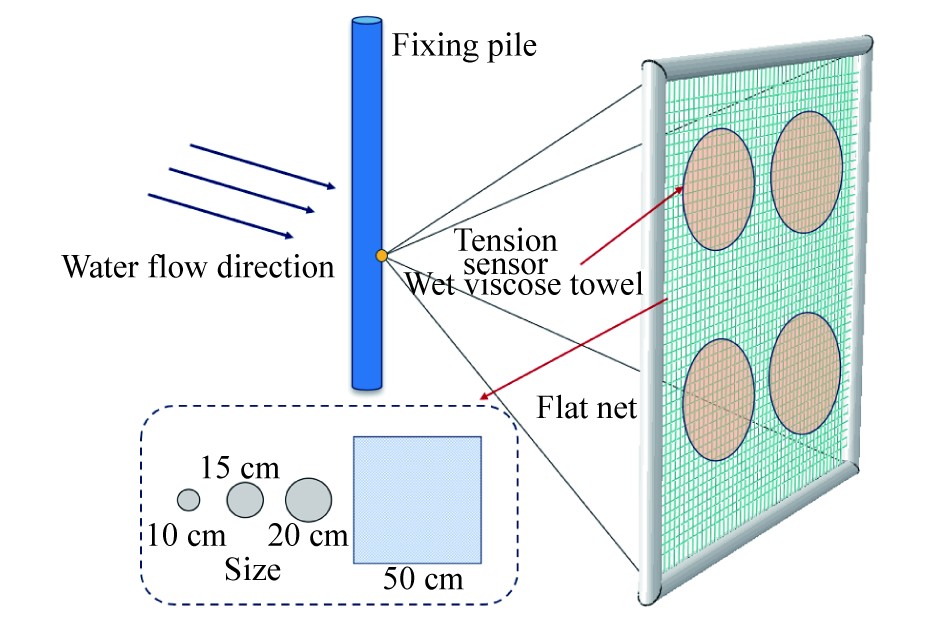
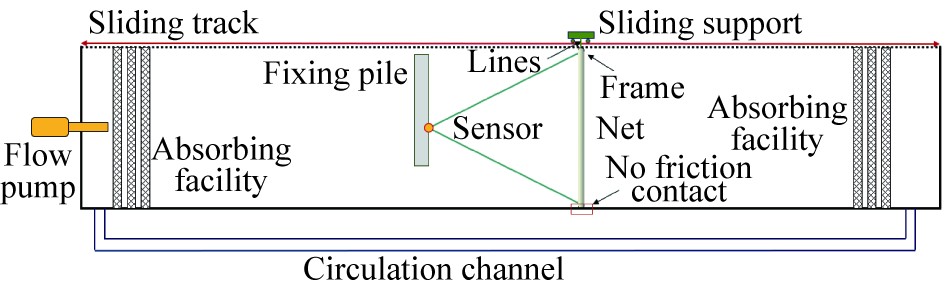
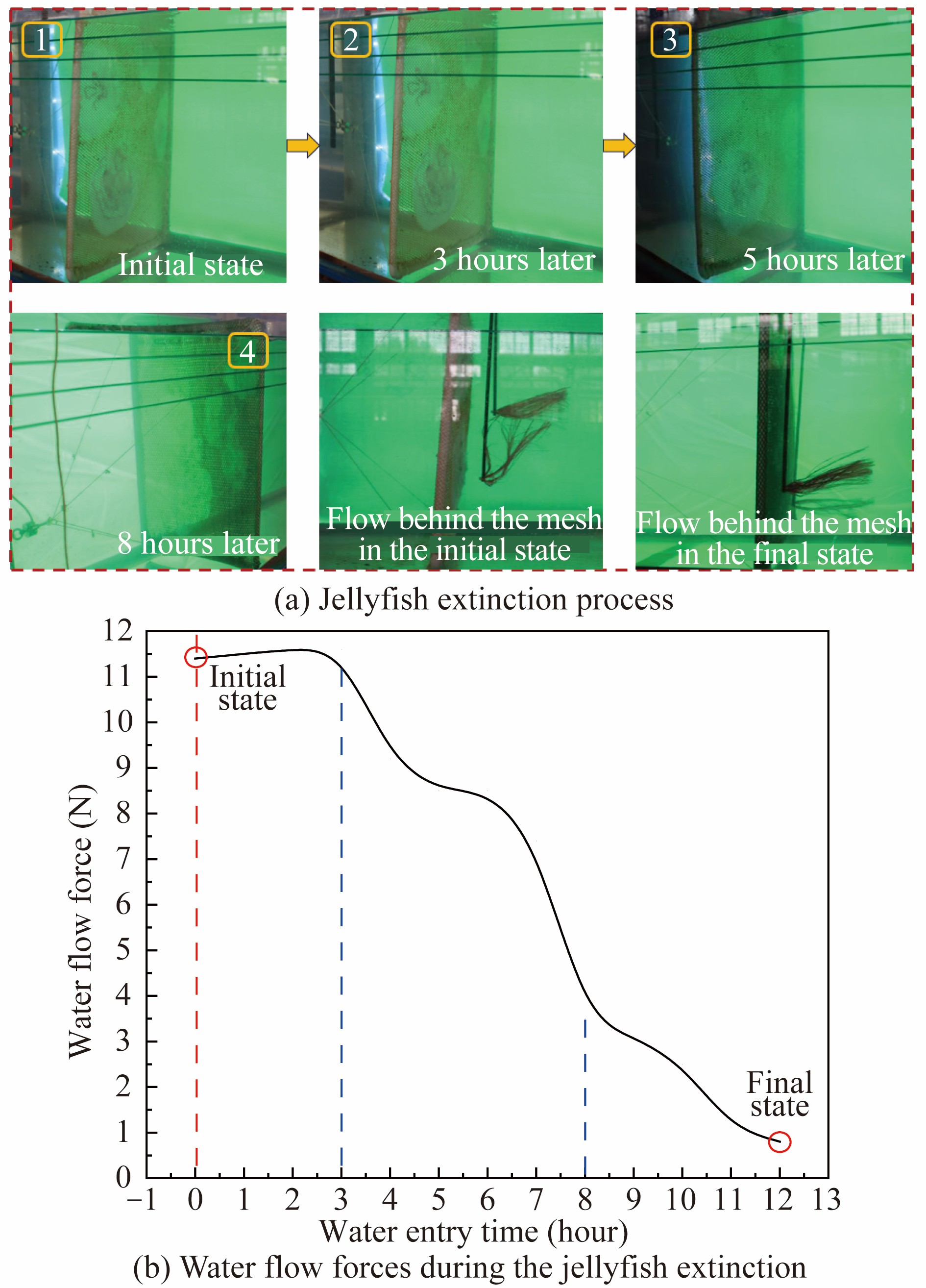
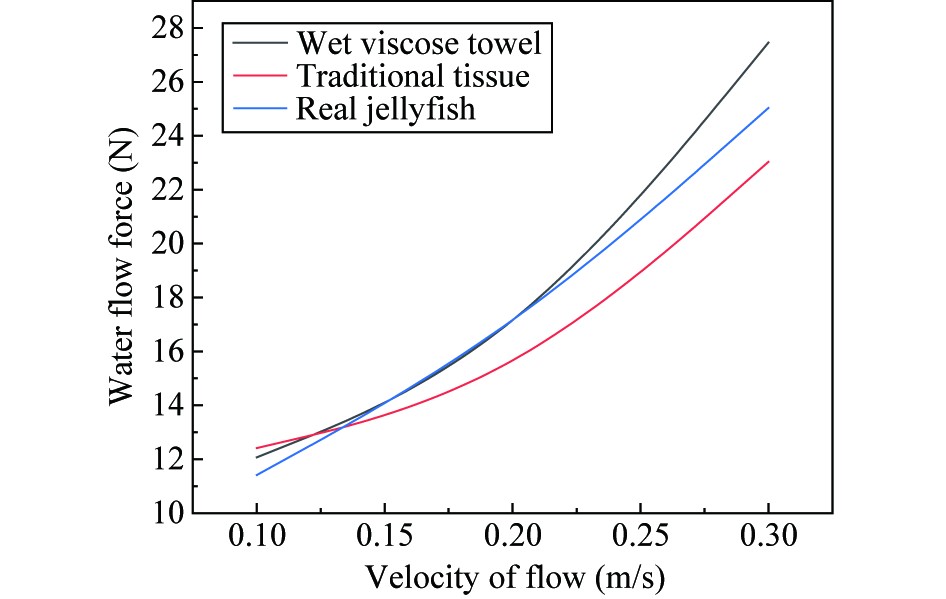
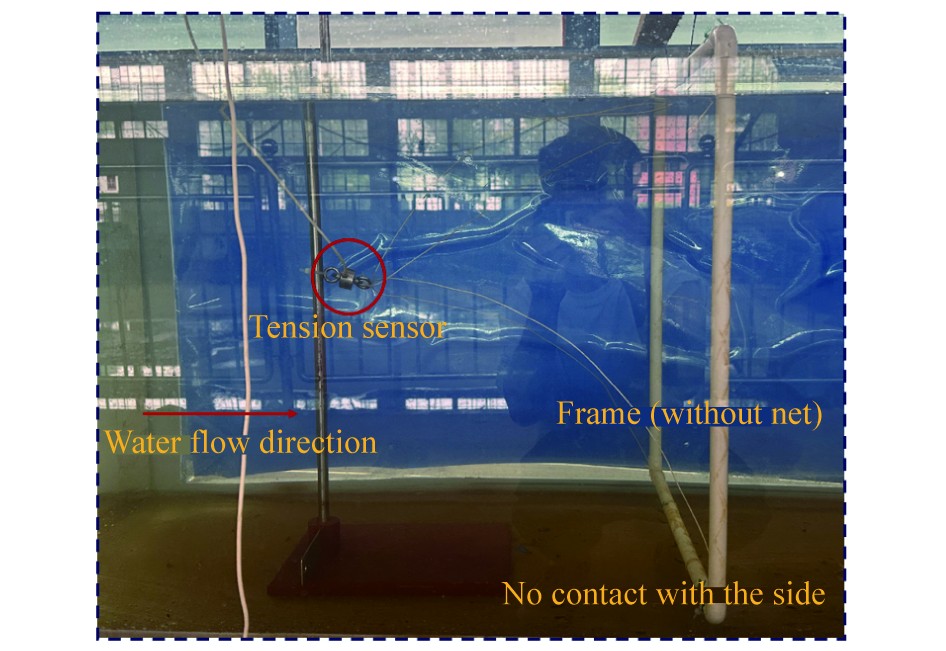
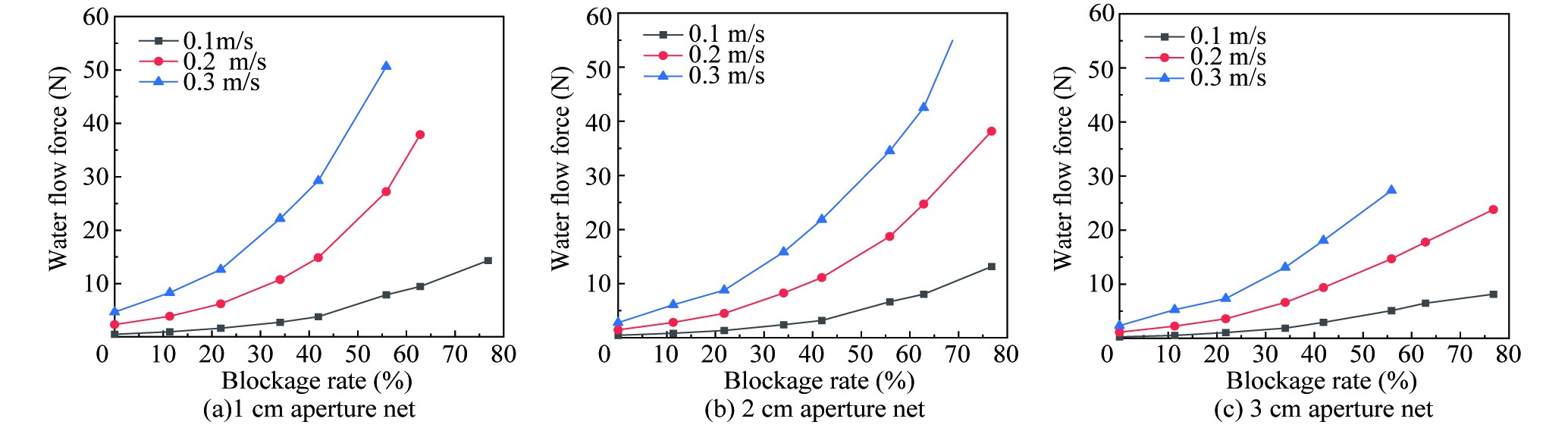
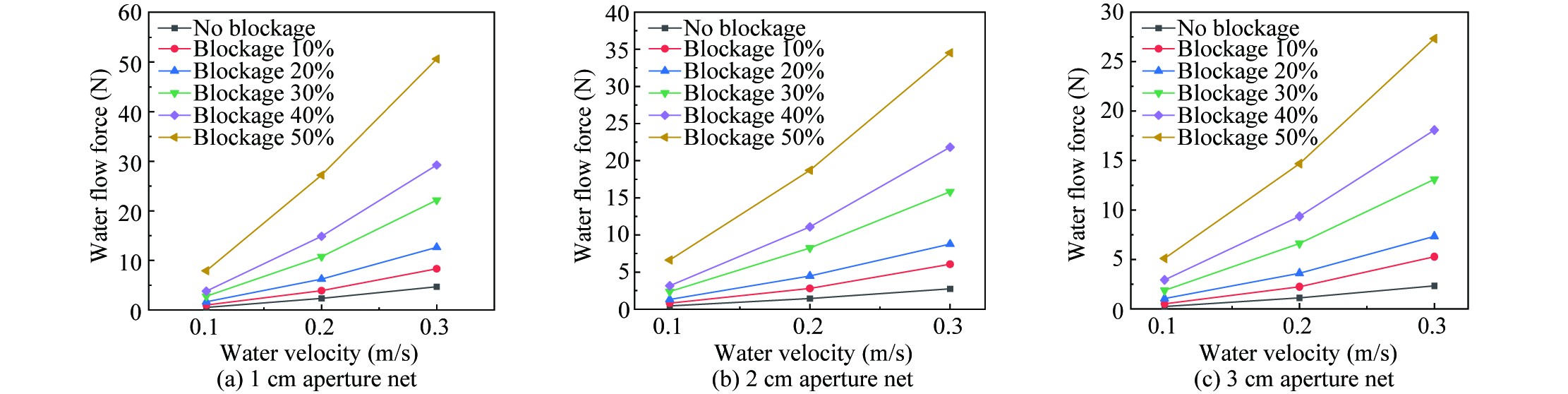
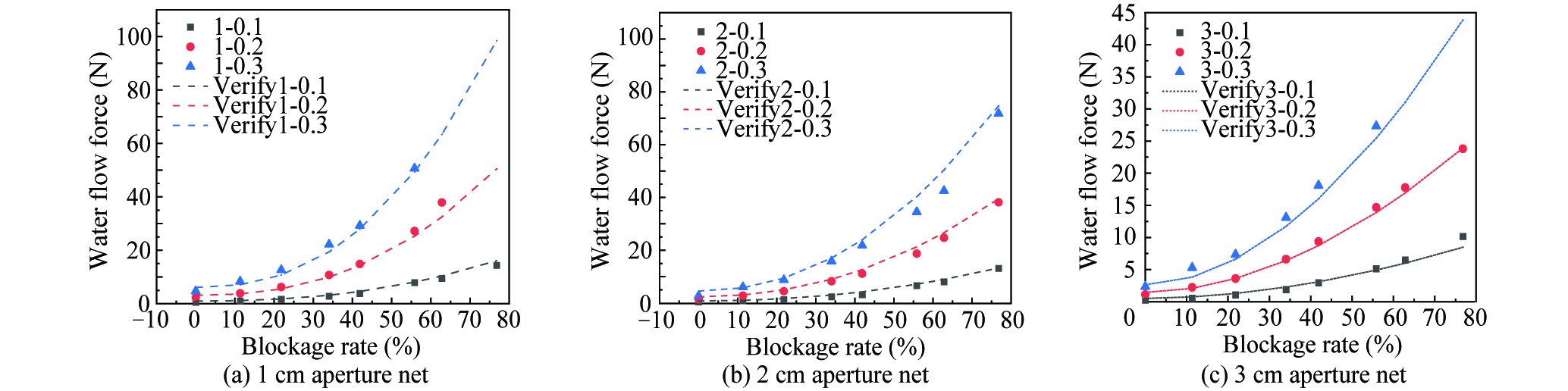
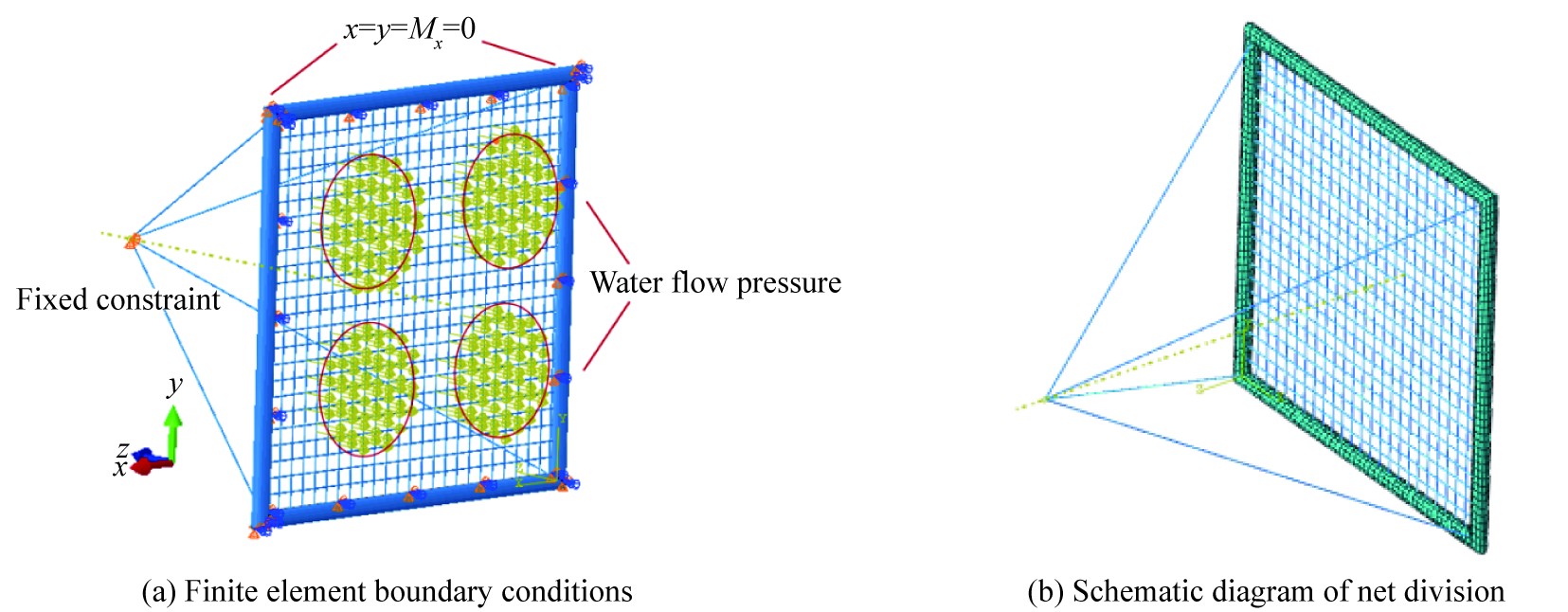
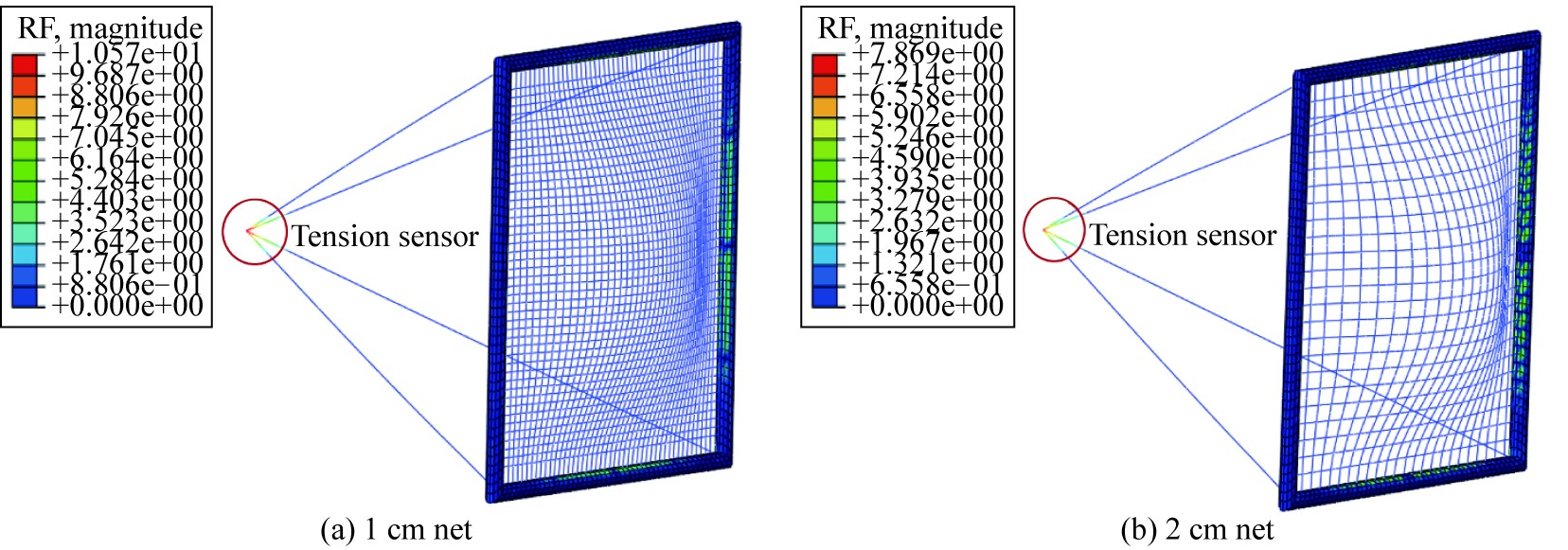
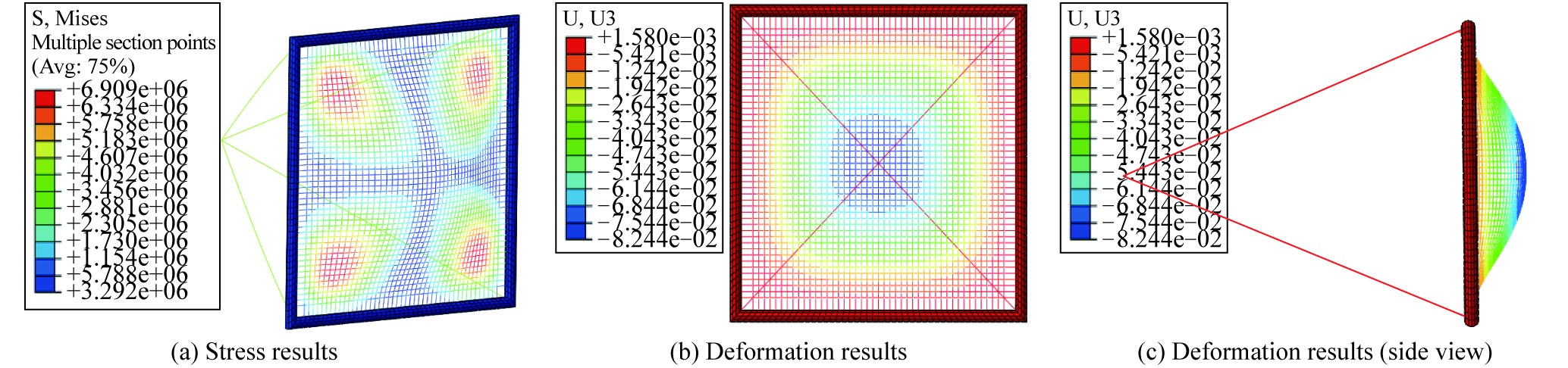
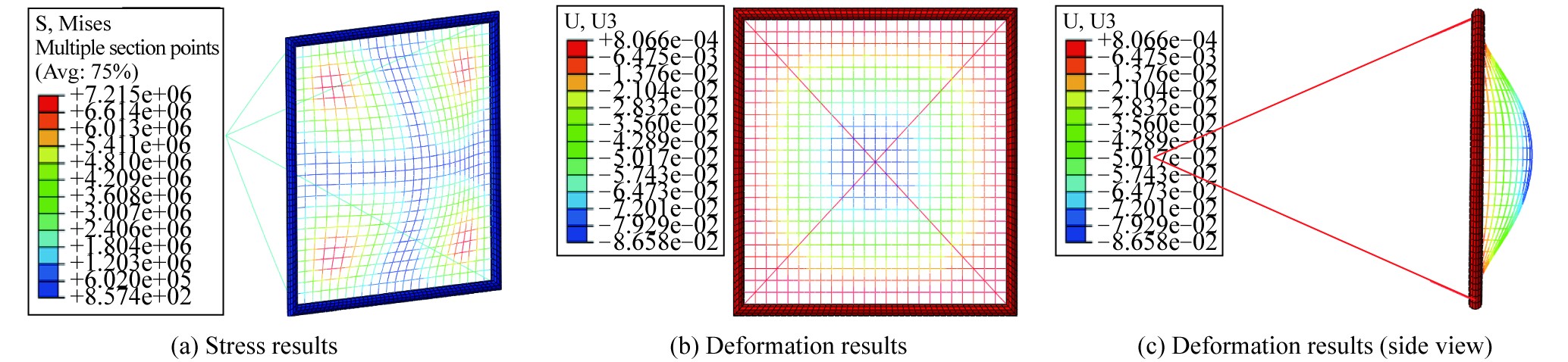
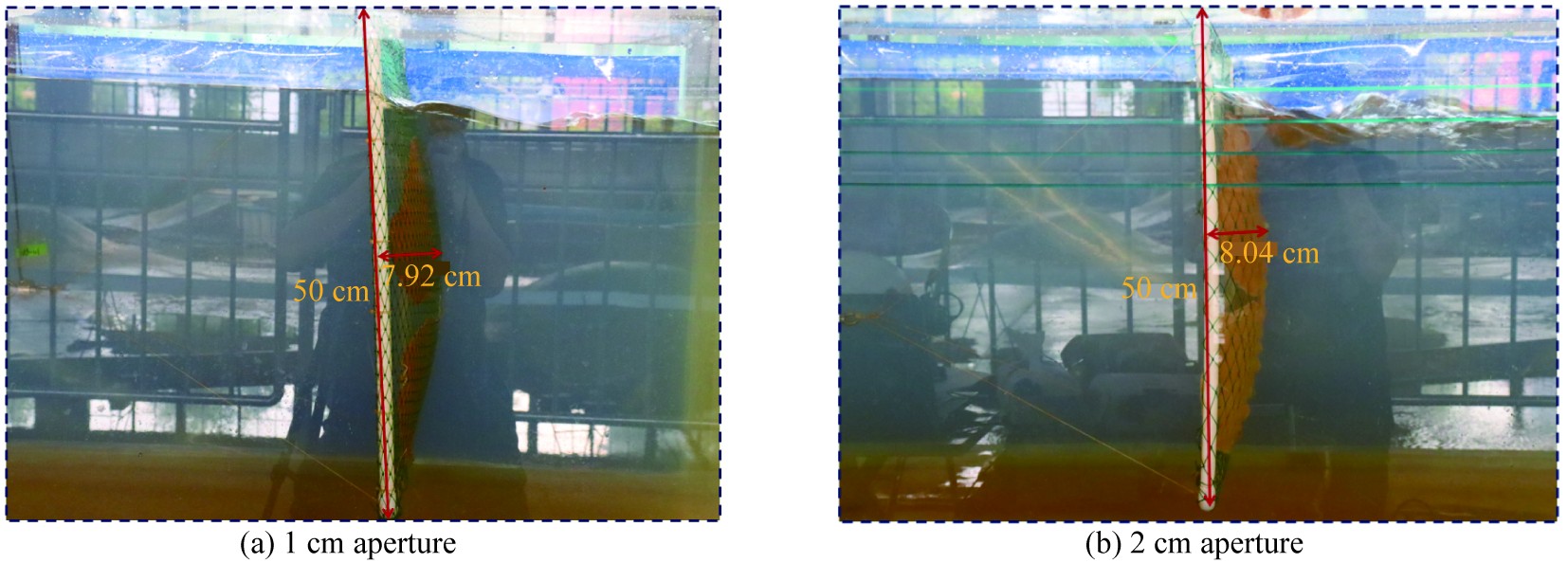
The increasing deployment of pollution interception devices has raised concerns about bioaccumulation and blockage effects, which may significantly compromise the structural integrity of nuclear power plant cooling systems. This study examined the cooling water intake of the Taishan Nuclear Power Plant, utilizing jellyfish as a representative biohazard. Physical model tests and finite element simulations were conducted to evaluate the mechanical response of nets with varying aperture sizes under jellyfish-induced blockage. A wet viscose fiber towel composed of non-woven polyester served as a jellyfish simulant material. The experiments evaluated blockage rates ranging from 10% to 70% and flow velocities from 0.1 to 0.3 m/s. Results demonstrated that net tension increased nonlinearly with blockage rate and intensified markedly when blockage exceeded 50%. A predictive model based on the Morison equation was developed, demonstrating strong correlation with the test data, with deviations under 7% for blockage rates exceeding 20%. The numerical simulations indicated that the 2 cm aperture net experienced a maximum stress of 7.2 MPa and deformation of 8.7 cm, exceeding those of the 1 cm net. These findings confirmed that smaller aperture nets generate larger resistance under high blockage conditions. This research provides practical guidance for mesh aperture selection and establishes a theoretical foundation for early warning thresholds, enhancing the safety management of nuclear power cooling systems during acute jellyfish bloom events.
The increasing deployment of pollution interception devices has raised concerns about bioaccumulation and blockage effects, which may significantly compromise the structural integrity of nuclear power plant cooling systems. This study examined the cooling water intake of the Taishan Nuclear Power Plant, utilizing jellyfish as a representative biohazard. Physical model tests and finite element simulations were conducted to evaluate the mechanical response of nets with varying aperture sizes under jellyfish-induced blockage. A wet viscose fiber towel composed of non-woven polyester served as a jellyfish simulant material. The experiments evaluated blockage rates ranging from 10% to 70% and flow velocities from 0.1 to 0.3 m/s. Results demonstrated that net tension increased nonlinearly with blockage rate and intensified markedly when blockage exceeded 50%. A predictive model based on the Morison equation was developed, demonstrating strong correlation with the test data, with deviations under 7% for blockage rates exceeding 20%. The numerical simulations indicated that the 2 cm aperture net experienced a maximum stress of 7.2 MPa and deformation of 8.7 cm, exceeding those of the 1 cm net. These findings confirmed that smaller aperture nets generate larger resistance under high blockage conditions. This research provides practical guidance for mesh aperture selection and establishes a theoretical foundation for early warning thresholds, enhancing the safety management of nuclear power cooling systems during acute jellyfish bloom events.
2026, 40(3)
:713-723.
doi: 10.1007/s13344-026-0054-9
Abstract:
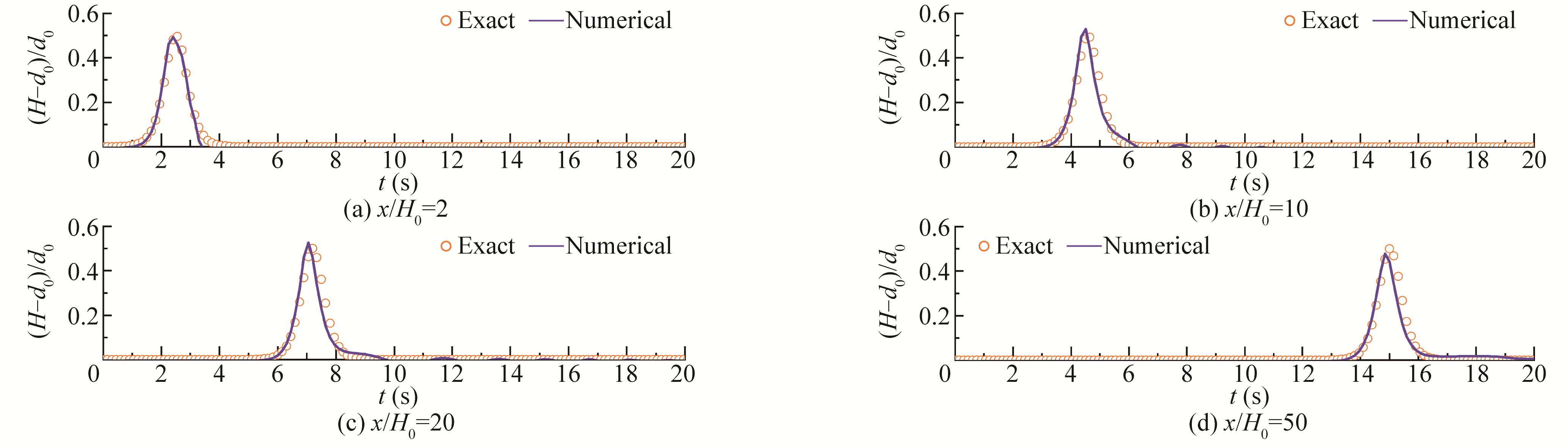
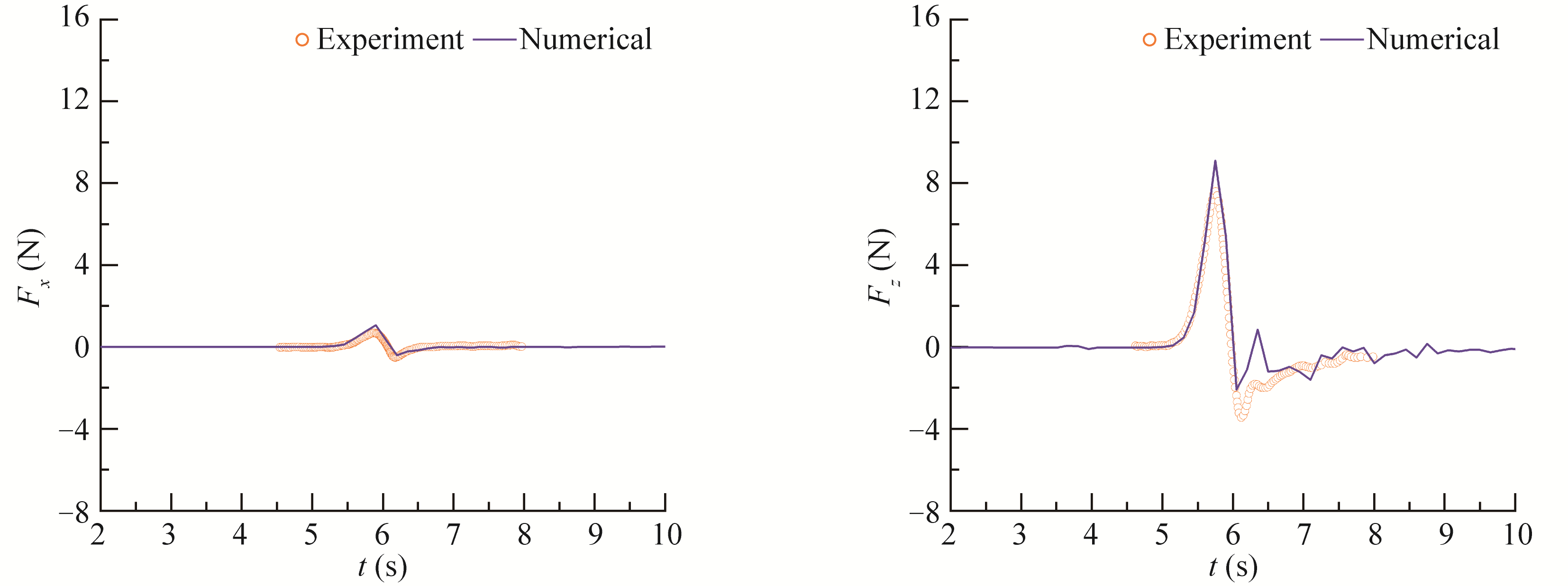
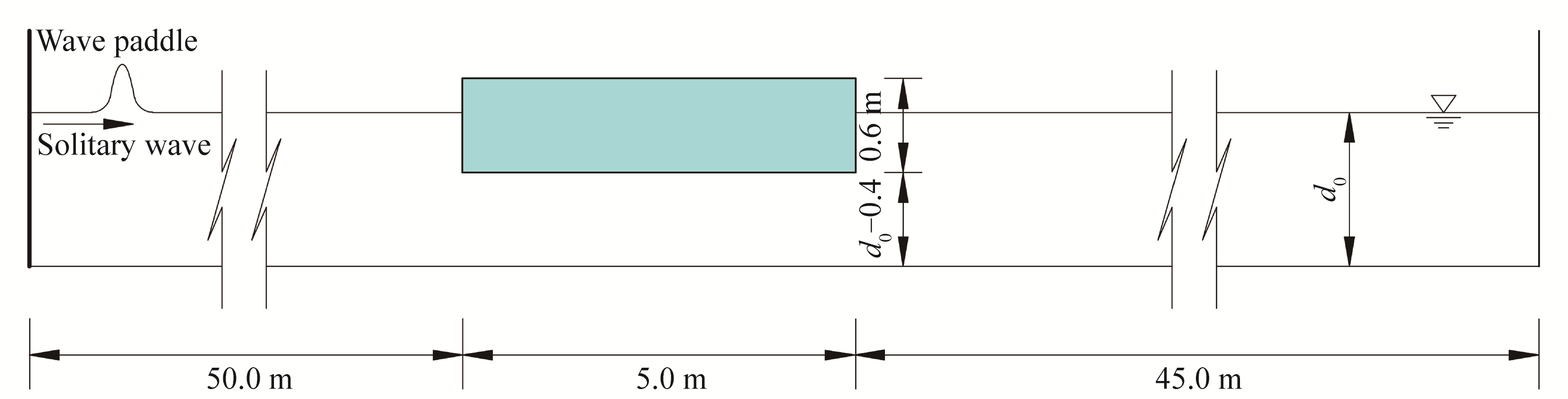
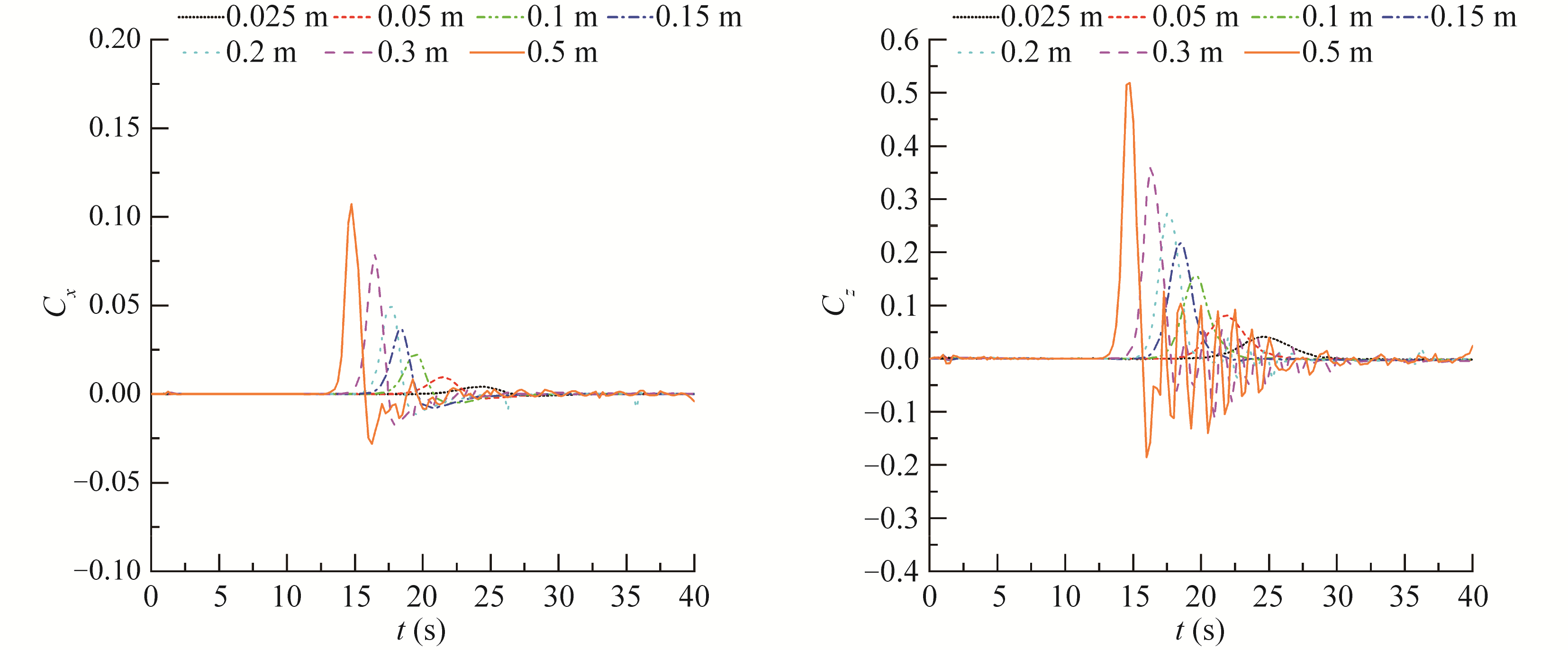
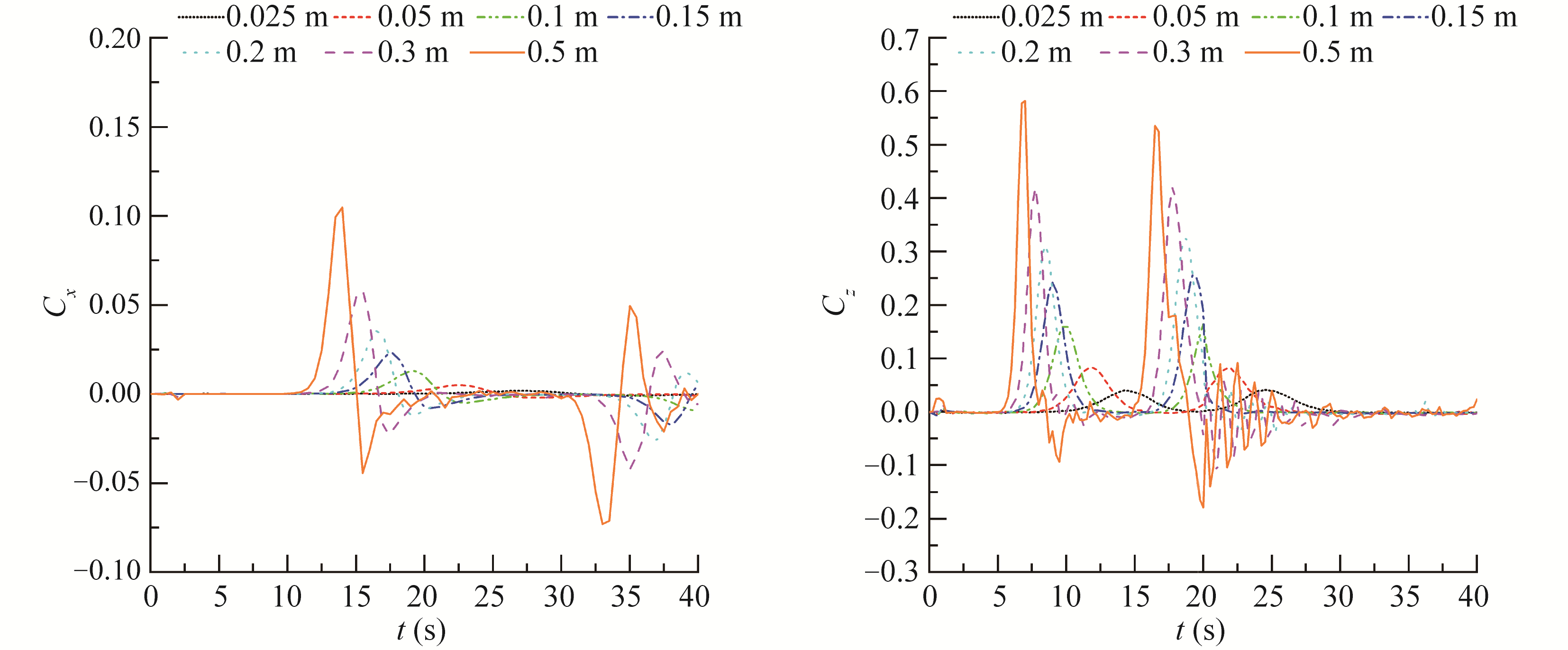
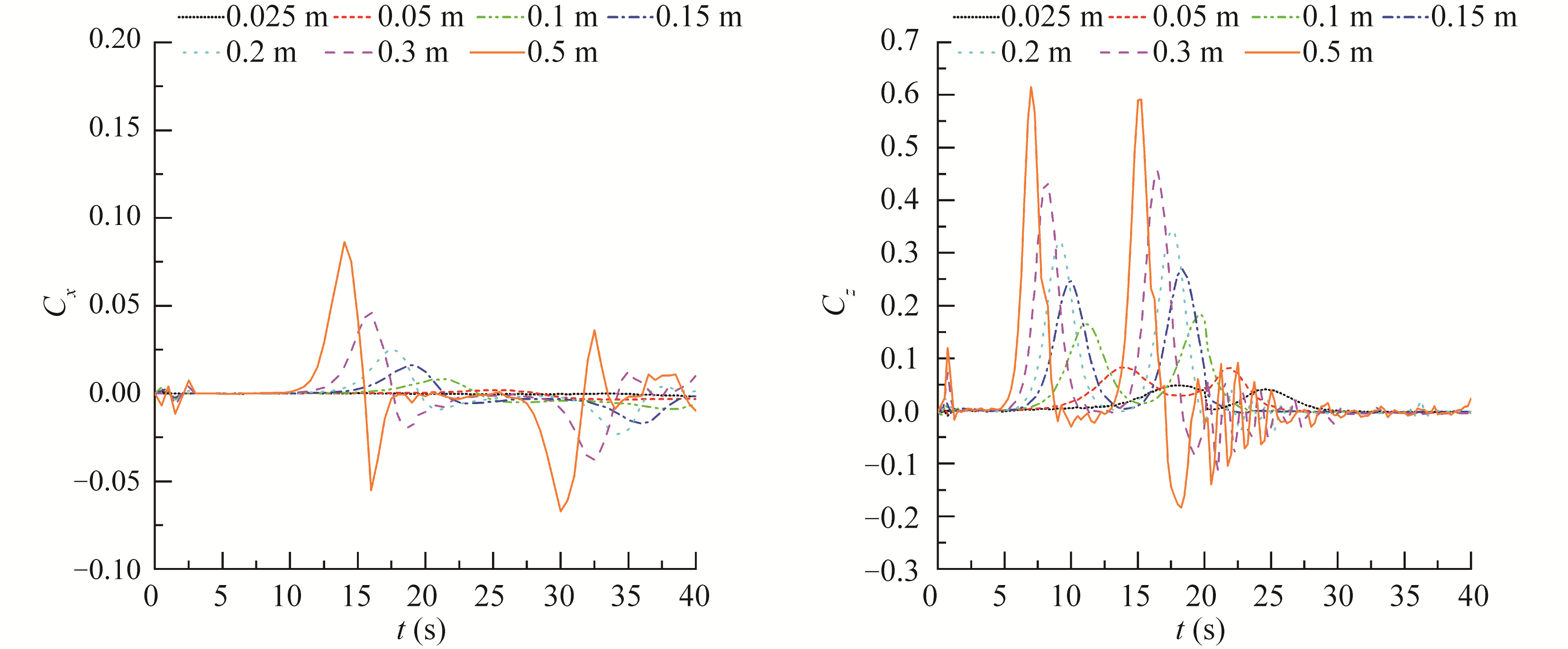
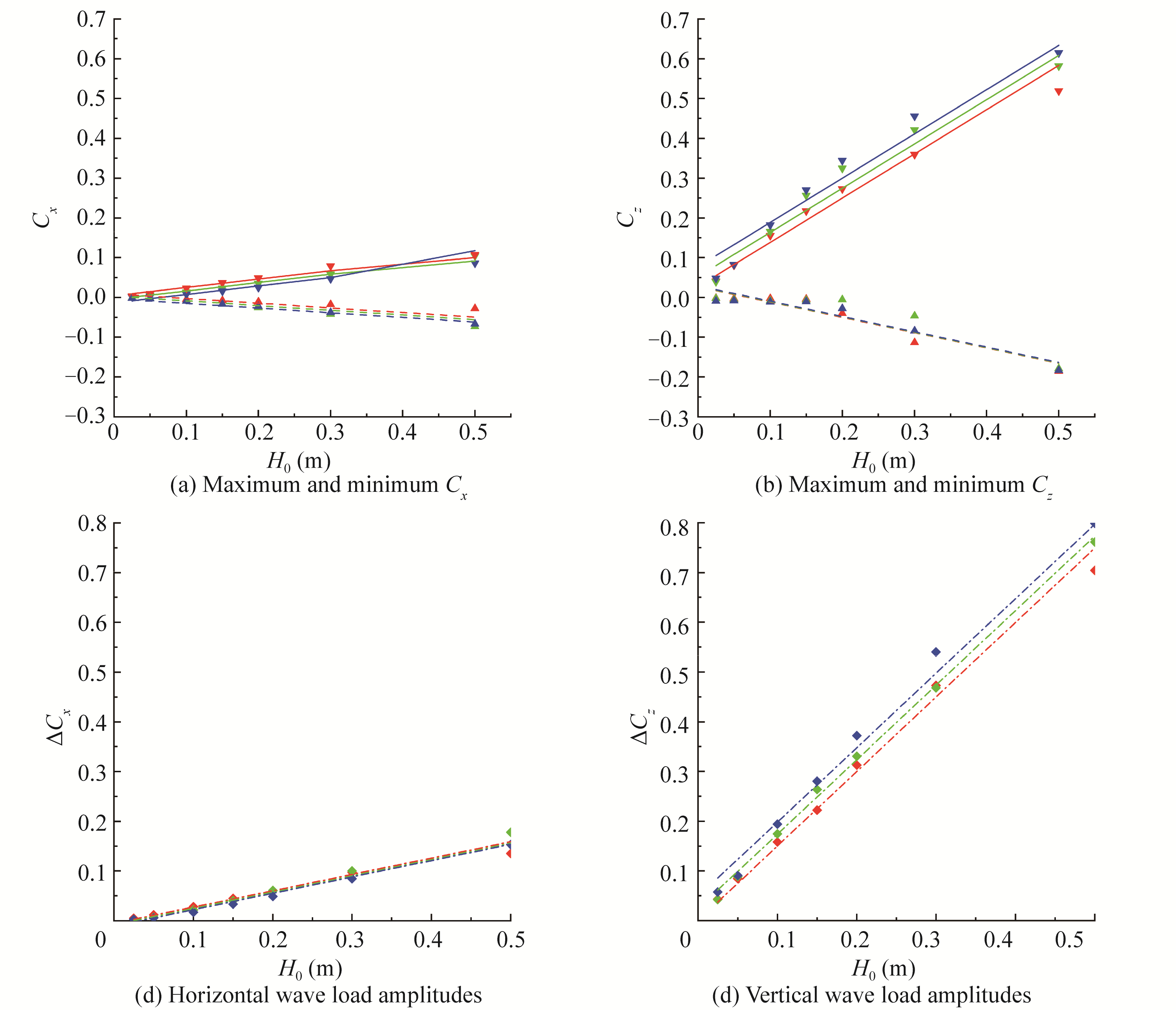
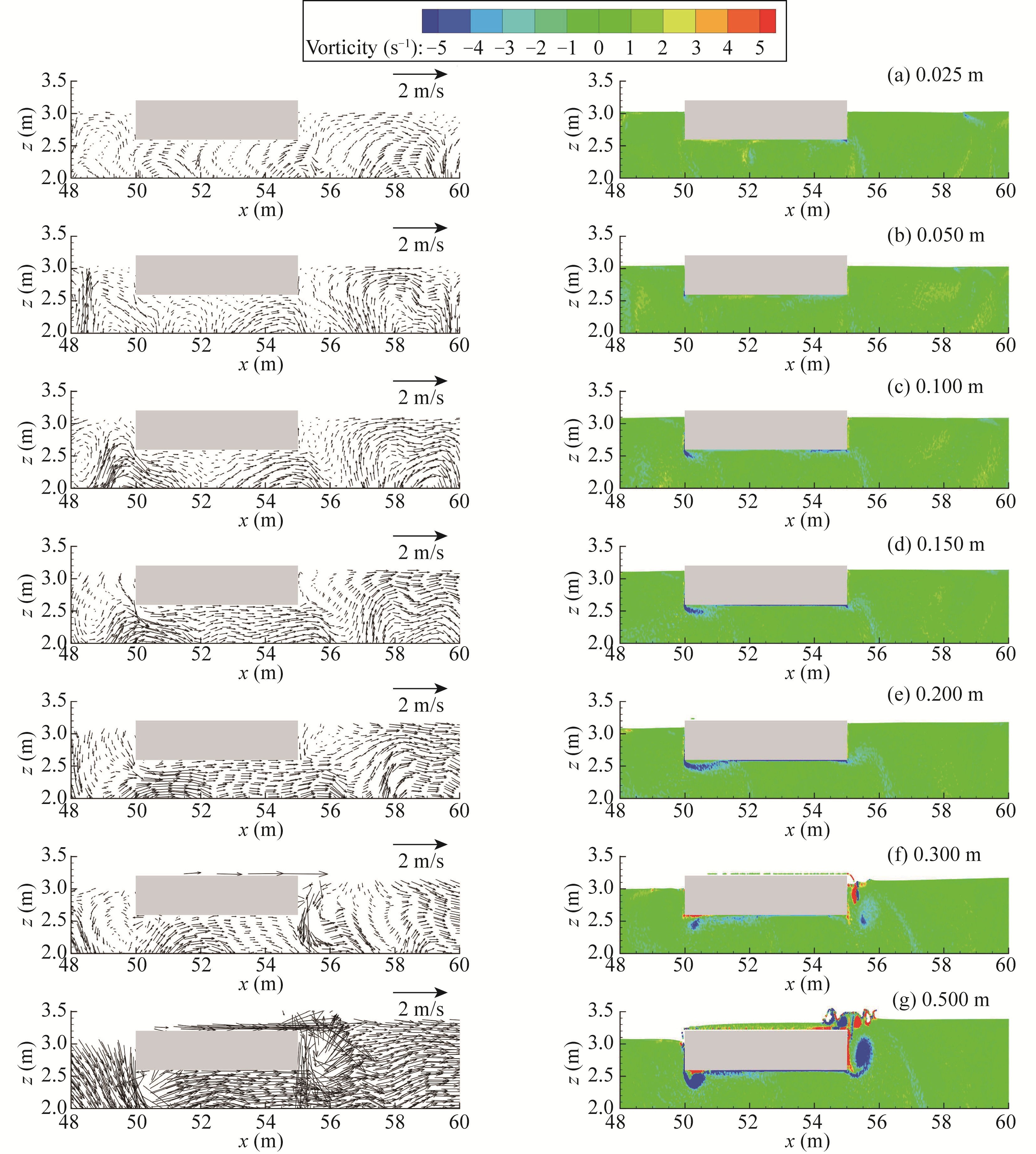
Wave loads are a critical factor influencing the safety of semi-submersible offshore platforms (SSOPs). However, research on wave loads acting on semi-submerged structures remains limited due to complex large-amplitude motions, such as green water and wave breaking. To investigate the wave loads on an SSOP induced by a solitary wave, a meshless numerical model is developed by integrating the smoothed particle hydrodynamics (SPH) method, artificial viscosity, and Rayleigh theory. The model’s accuracy is validated by comparing simulated wave heights and wave loads against experimental data and exact analytical solutions. The maximum absolute error in the wave height peak is 0.037, corresponding to a relative error of 7.4%, while the maximum relative error in wave loads is 54% (absolute error: 0.37 N). Although the relative error in the wave loads appears large, primarily due to the small magnitude of the measured loads, the numerical results remain in good agreement with both the experimental data and the exact solutions. Flow velocities around the structure increase with higher wave heights, exceeding 2 m/s when wave heights surpass 0.2 m, owing to complex wave dynamics. Distinct vortices form both upstream and downstream of the structure, intensifying with increasing wave height. The peak magnitudes of horizontal forces (both positive and negative) decrease with greater water depth, whereas vertical forces increase. Notably, the wave load amplitude (WLA) in the z-direction significantly exceeds that in the x-direction, reaching a maximum value of 0.799.
Wave loads are a critical factor influencing the safety of semi-submersible offshore platforms (SSOPs). However, research on wave loads acting on semi-submerged structures remains limited due to complex large-amplitude motions, such as green water and wave breaking. To investigate the wave loads on an SSOP induced by a solitary wave, a meshless numerical model is developed by integrating the smoothed particle hydrodynamics (SPH) method, artificial viscosity, and Rayleigh theory. The model’s accuracy is validated by comparing simulated wave heights and wave loads against experimental data and exact analytical solutions. The maximum absolute error in the wave height peak is 0.037, corresponding to a relative error of 7.4%, while the maximum relative error in wave loads is 54% (absolute error: 0.37 N). Although the relative error in the wave loads appears large, primarily due to the small magnitude of the measured loads, the numerical results remain in good agreement with both the experimental data and the exact solutions. Flow velocities around the structure increase with higher wave heights, exceeding 2 m/s when wave heights surpass 0.2 m, owing to complex wave dynamics. Distinct vortices form both upstream and downstream of the structure, intensifying with increasing wave height. The peak magnitudes of horizontal forces (both positive and negative) decrease with greater water depth, whereas vertical forces increase. Notably, the wave load amplitude (WLA) in the z-direction significantly exceeds that in the x-direction, reaching a maximum value of 0.799.

ScholarOne Manuscripts Log In
Current Issue
- Volume 40
- Issue 3
- June 2026
- Editor-in-Chief:
- Superintended by:
CHINA ASSOCIATION FOR SCIENCE AND TECHNOLOGY
- Sponsored by:
Chinese Ocean Engineering Society (COES)
- Edited by:
Nanjing Hydraulic Research Institute
Highlights
Stay up to Date
 Article abstracts by RSS
Article abstracts by RSS E-mail Alerts
E-mail Alerts