
2018 Vol.32(1)
Display Mode: |
2018, 32(1): 1-13.
doi: 10.1007/s13344-018-0001-5
Abstract:
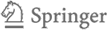
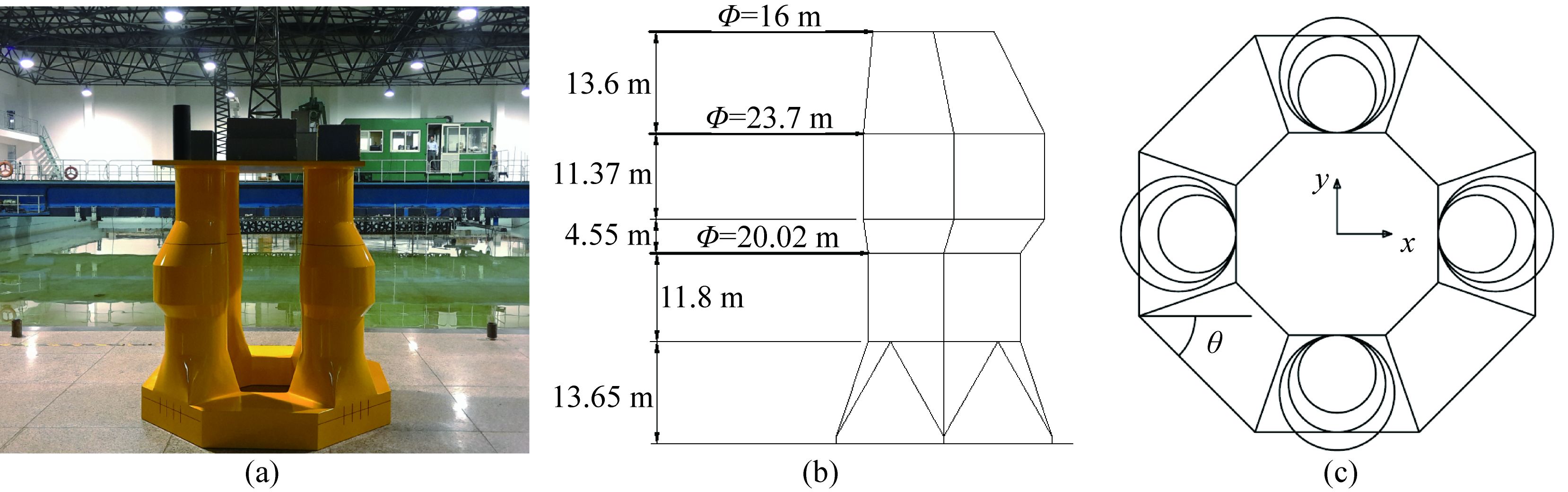
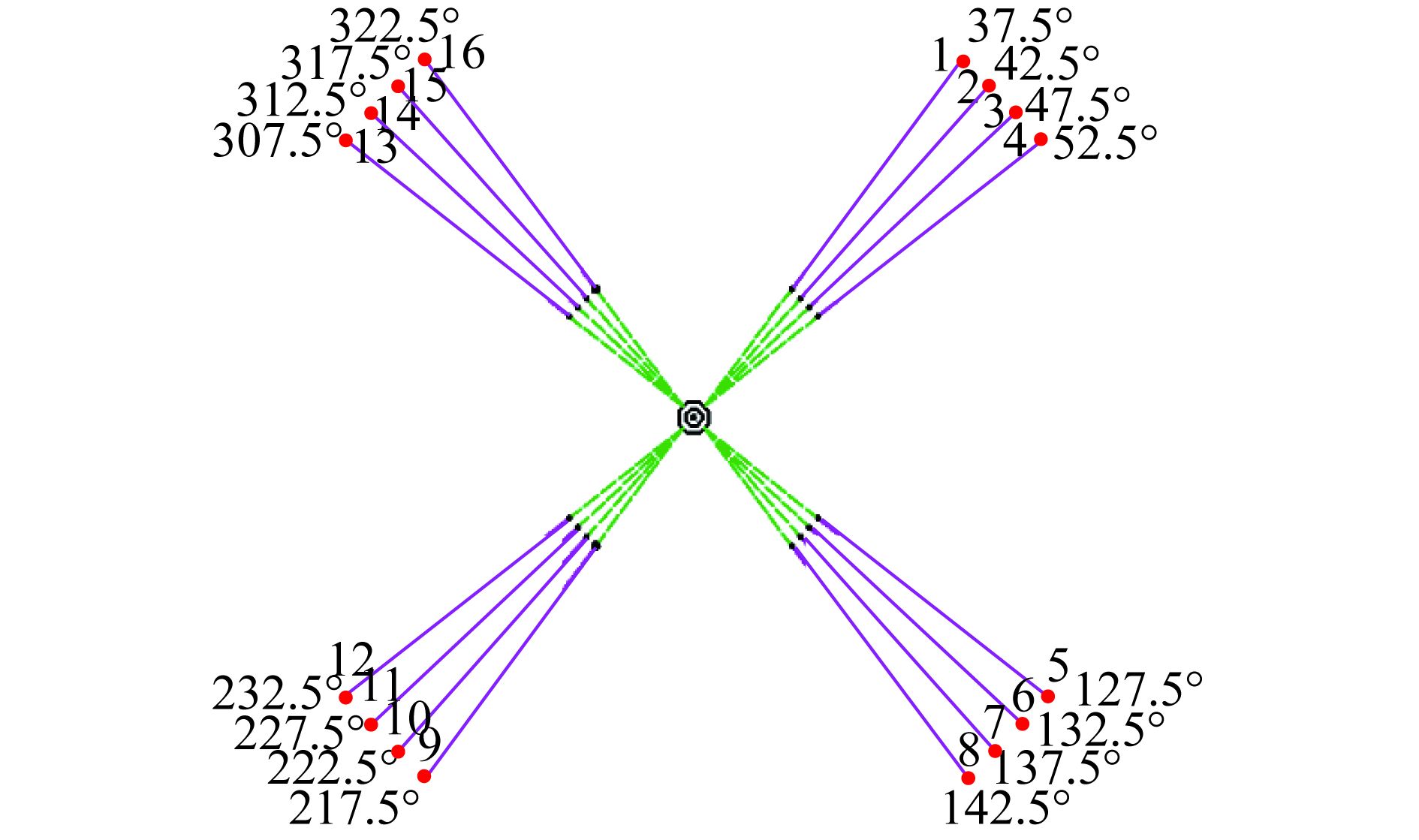
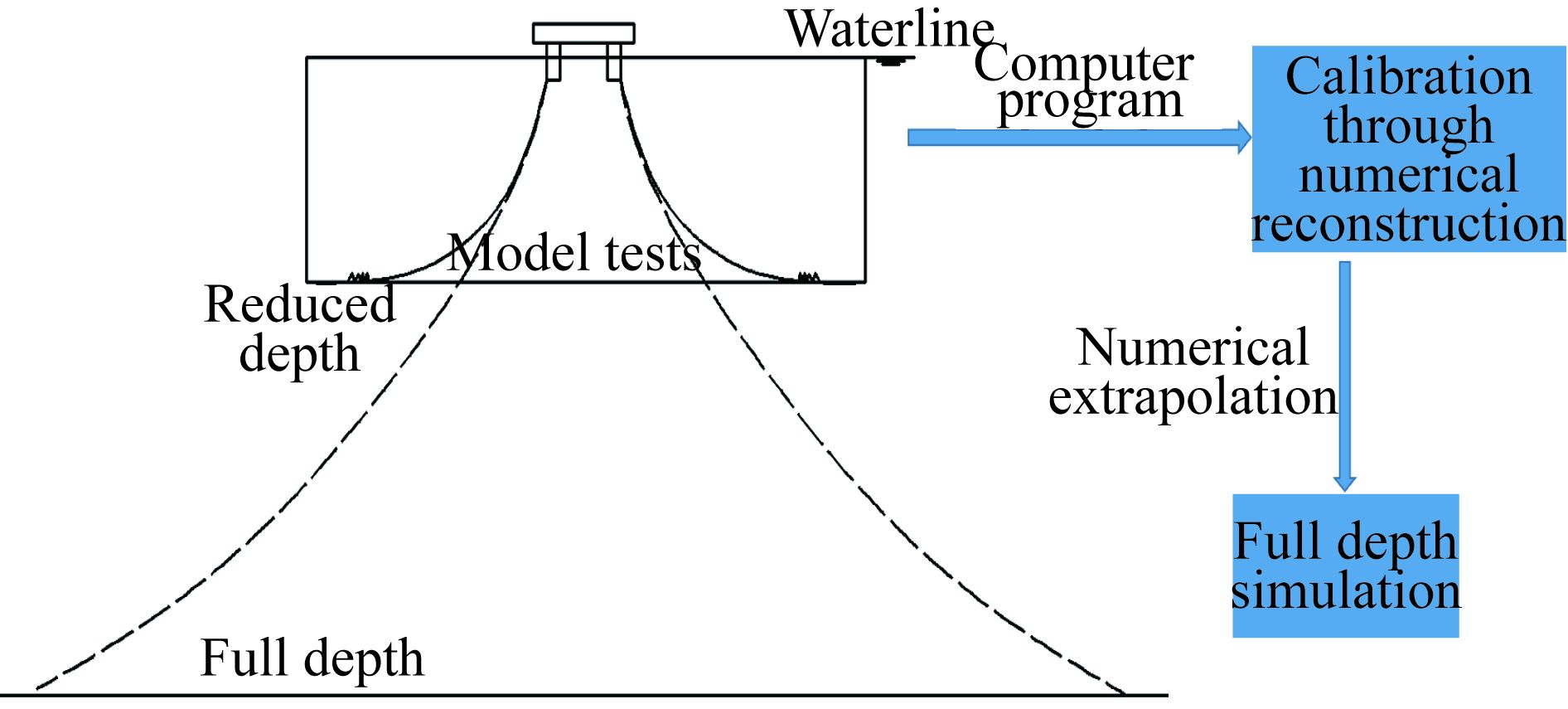
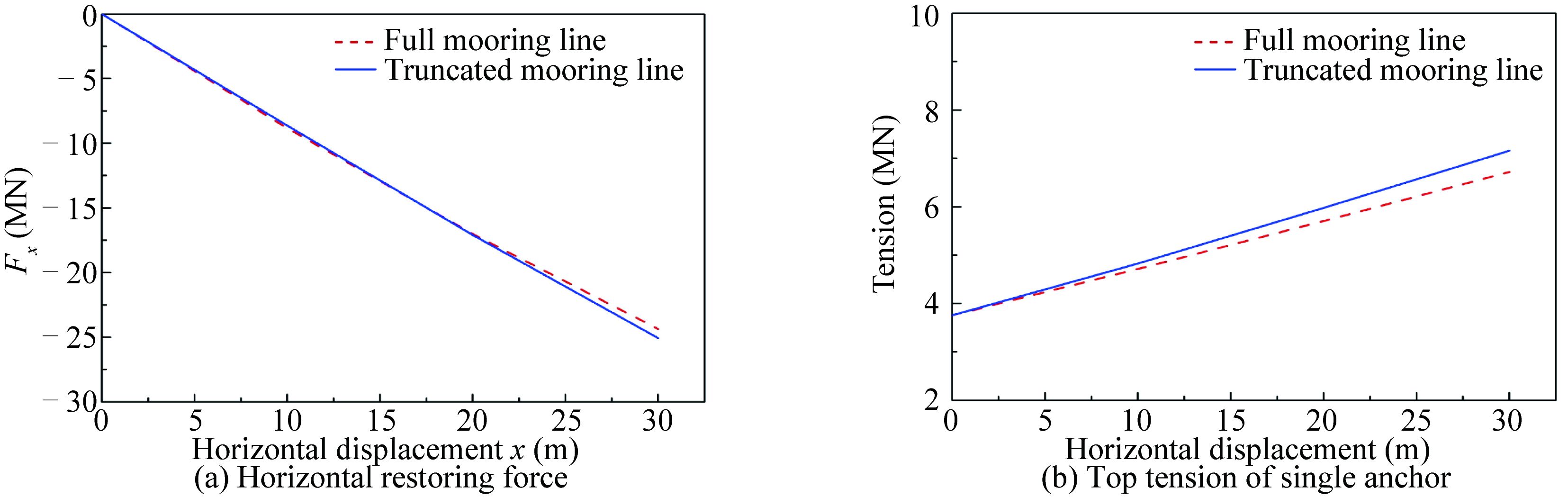
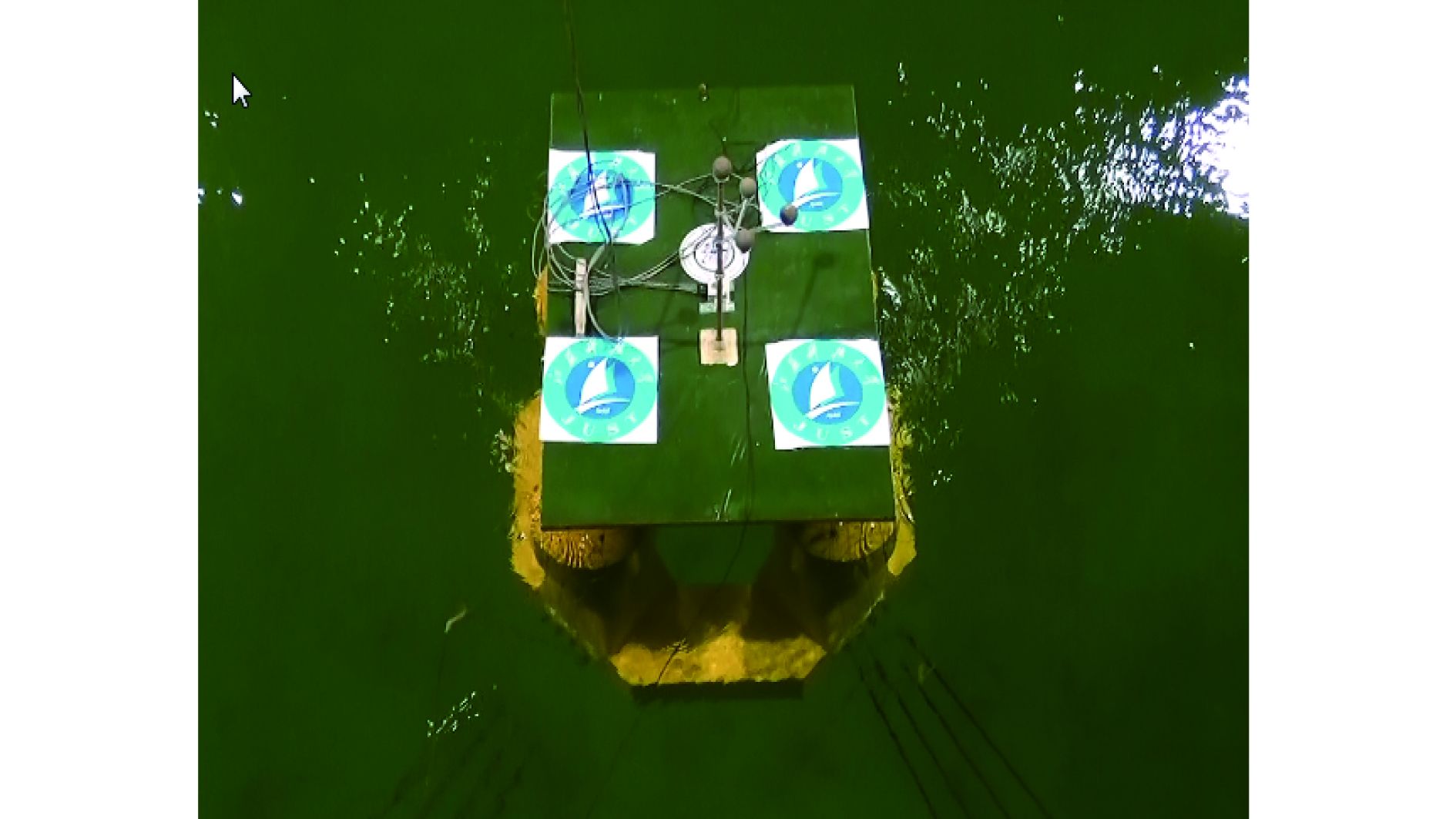
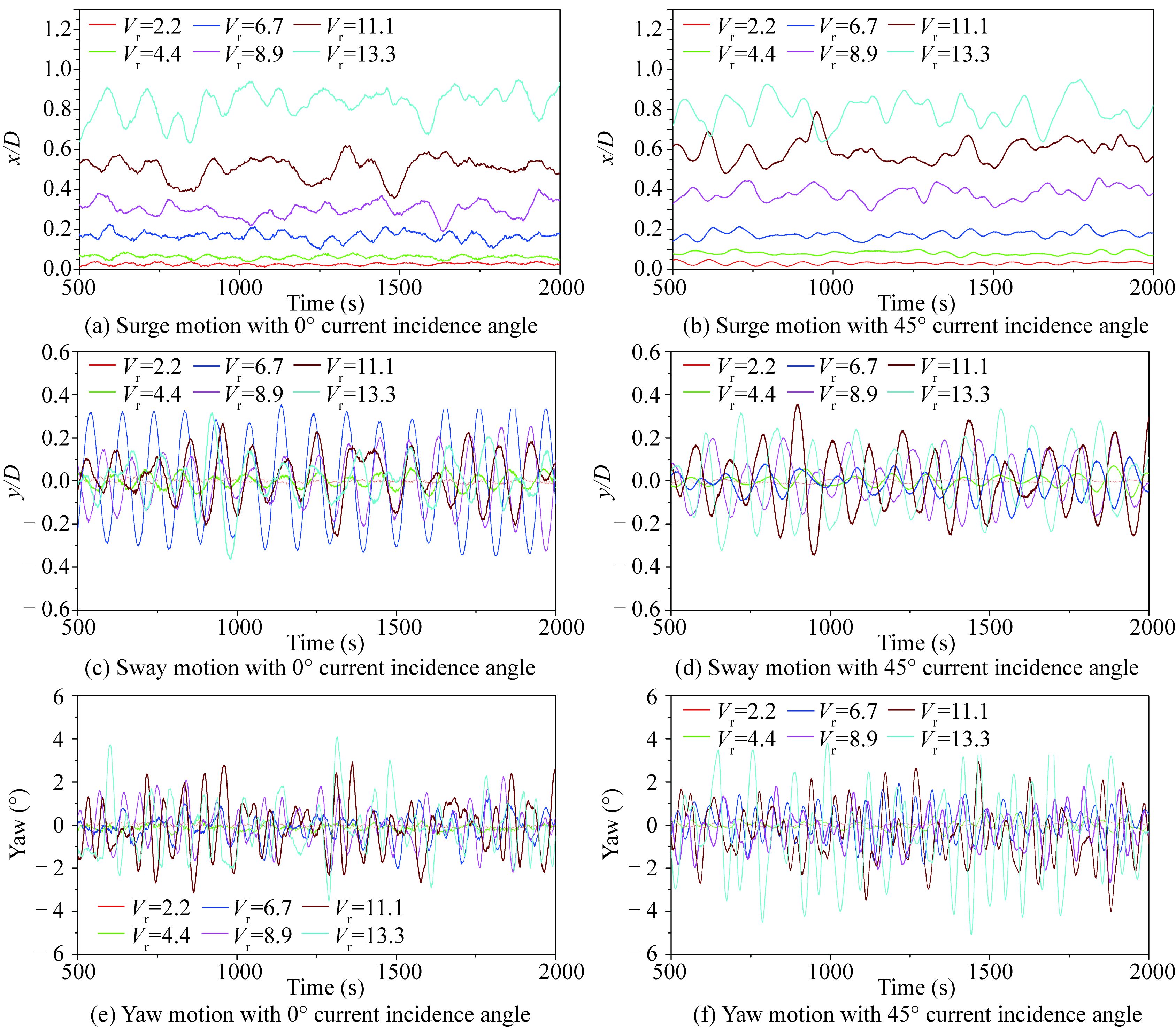
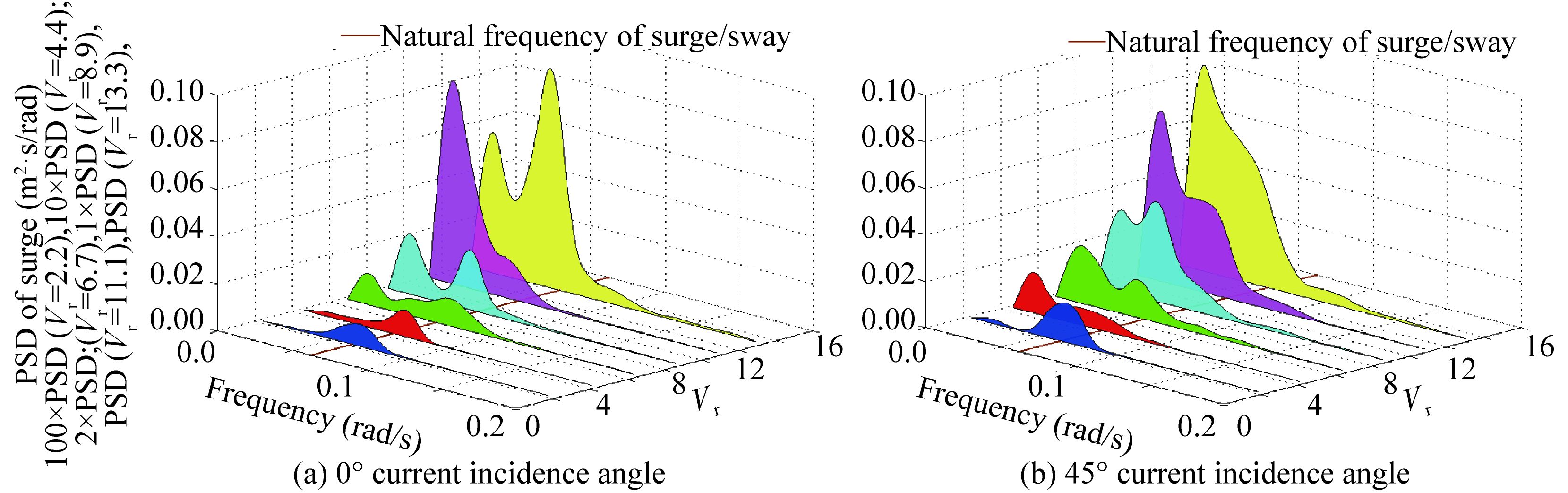
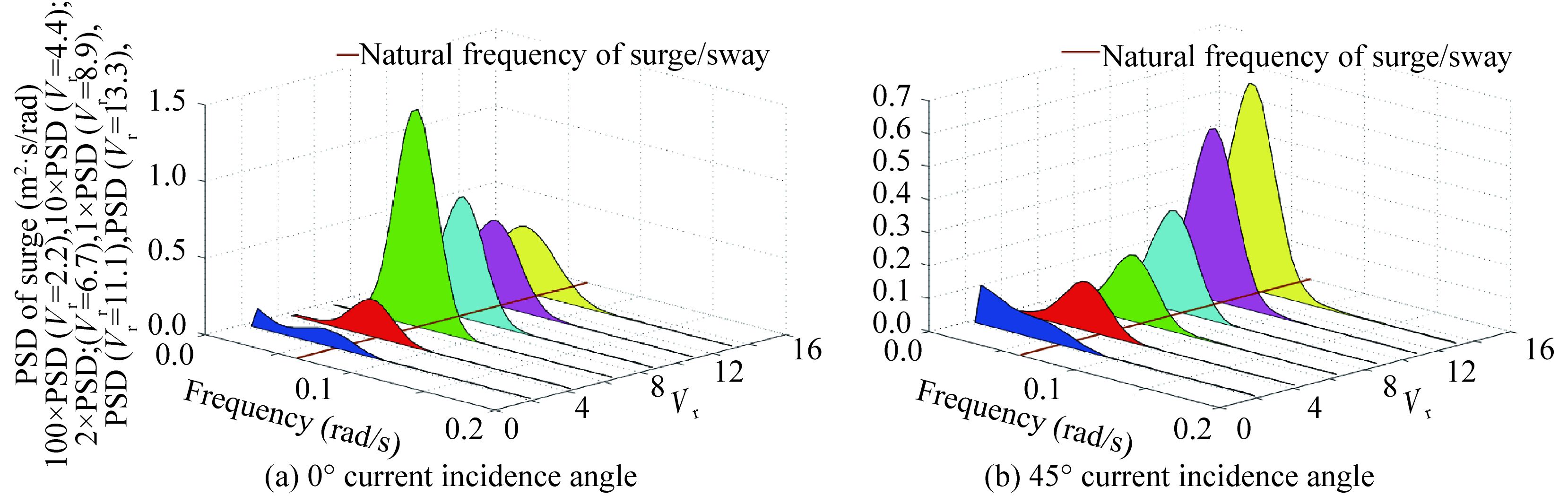
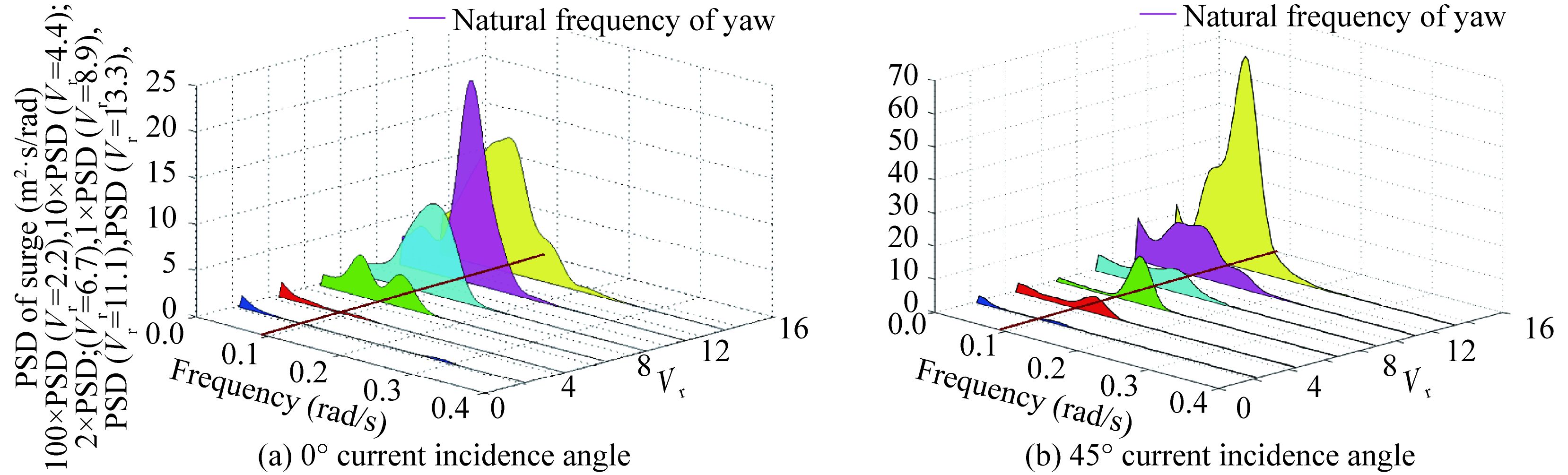
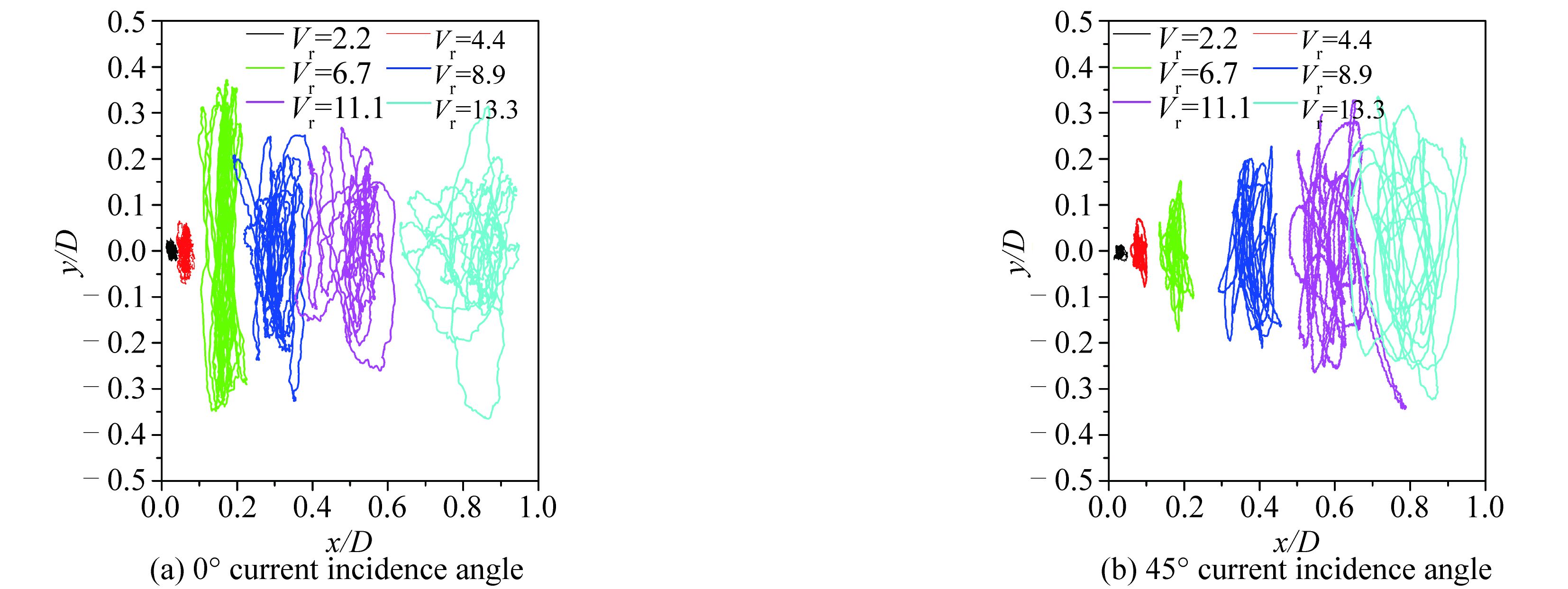
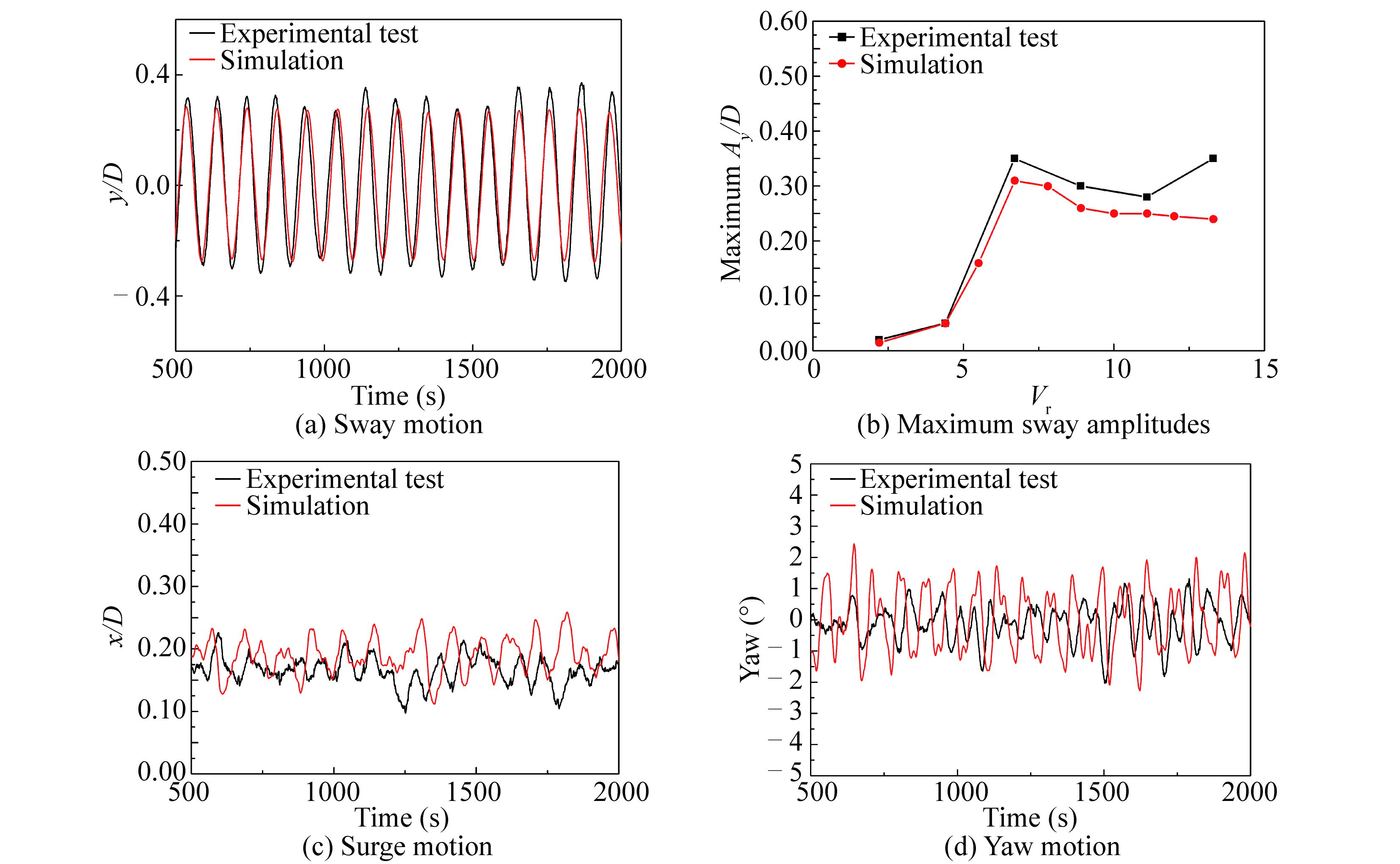
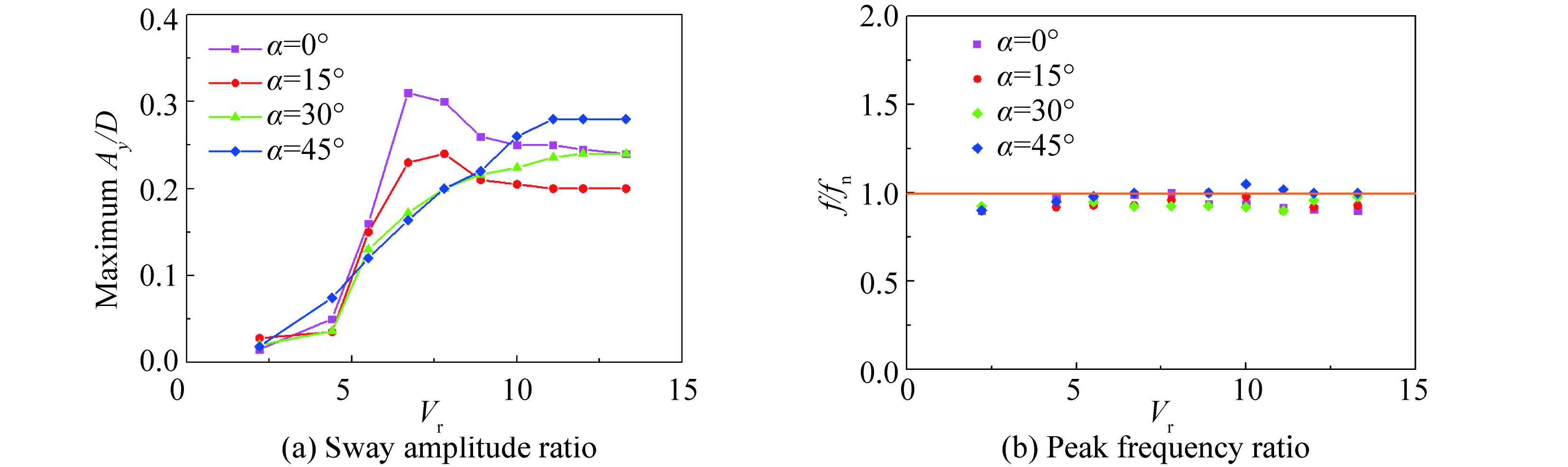
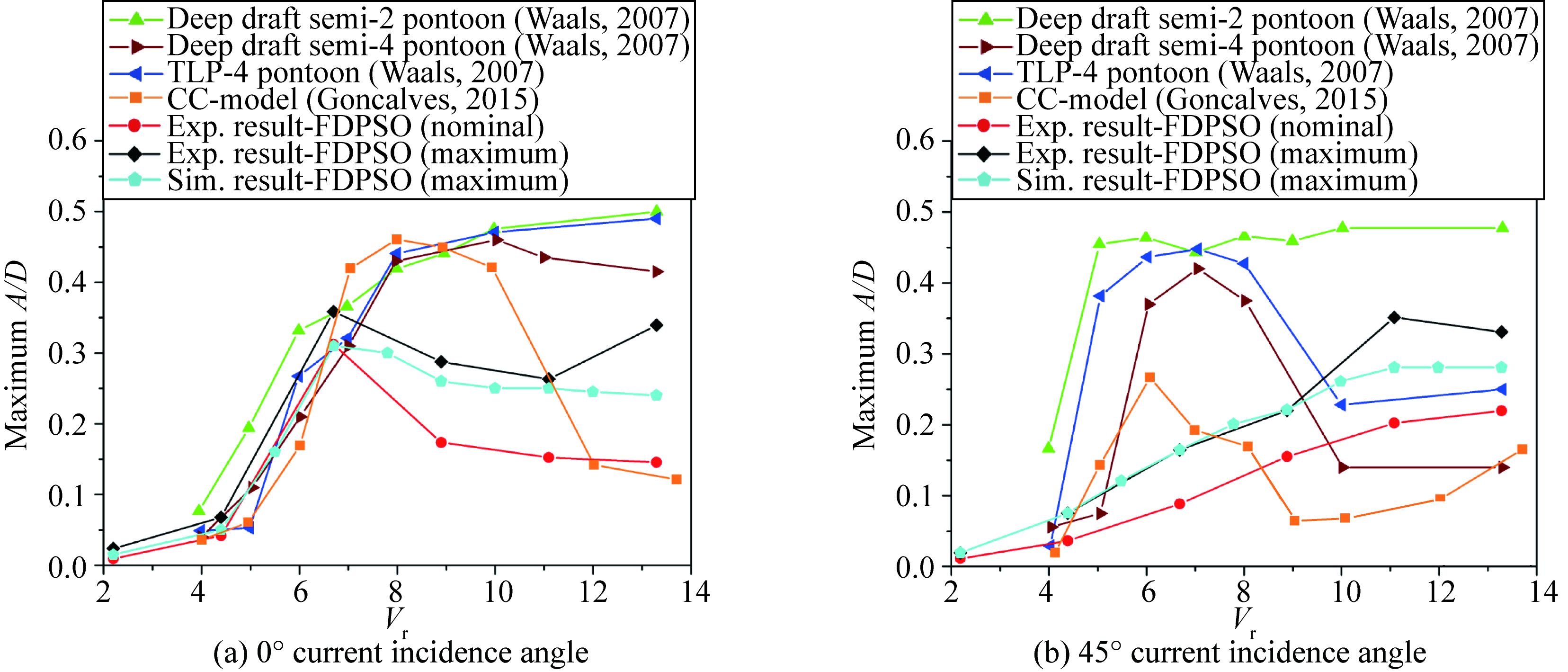
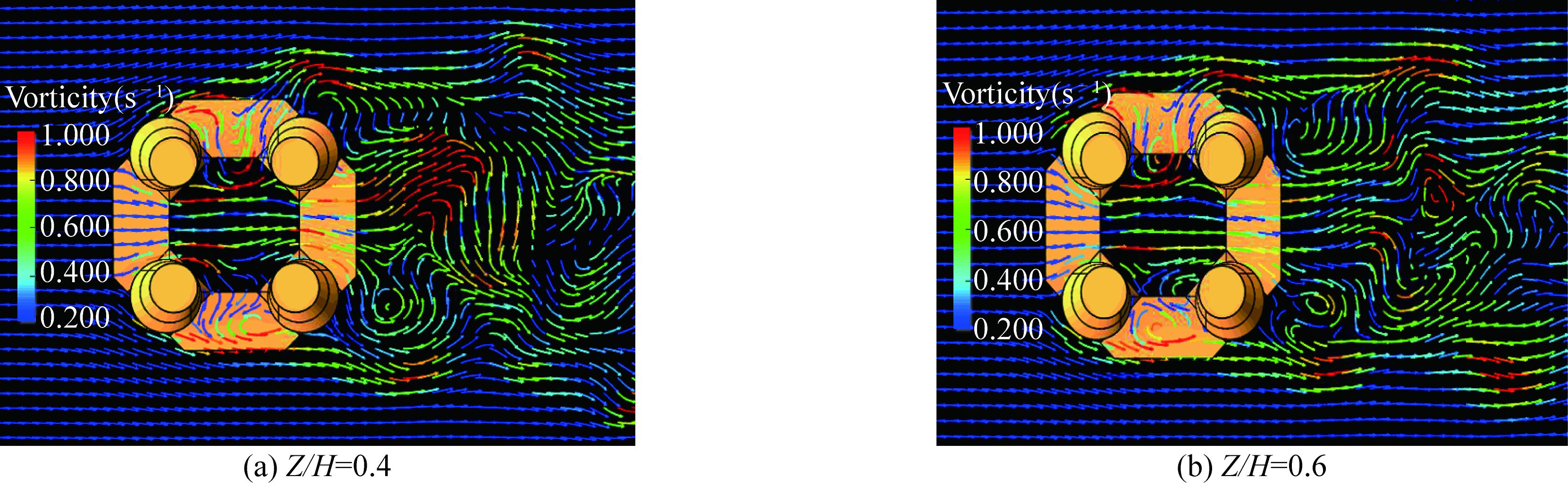
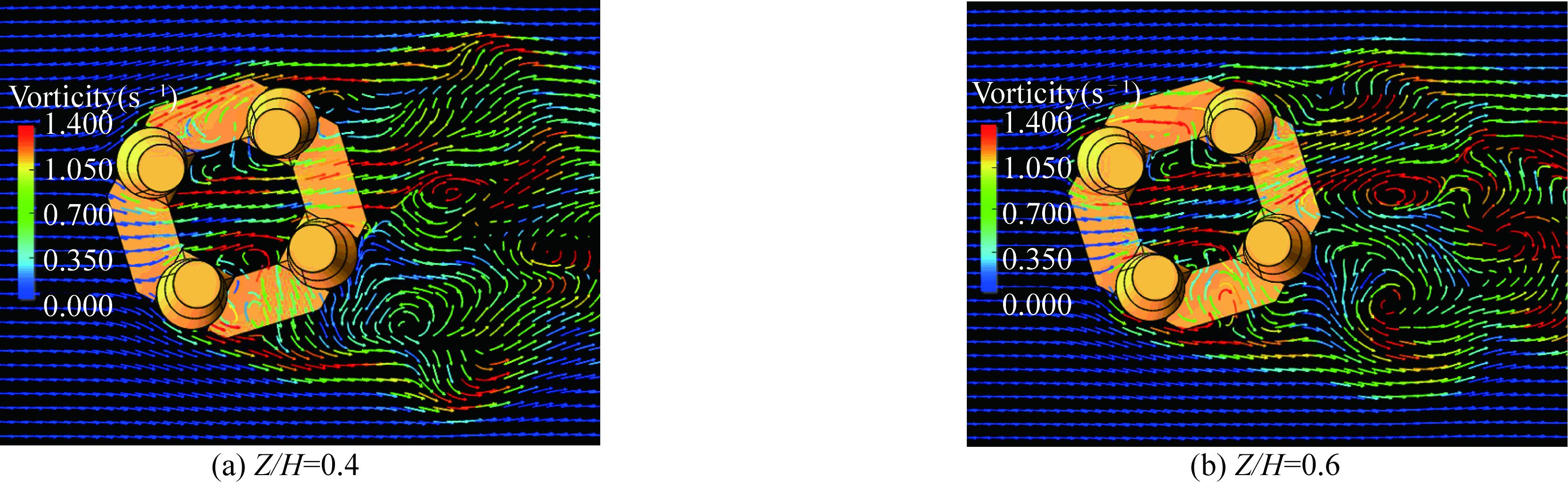
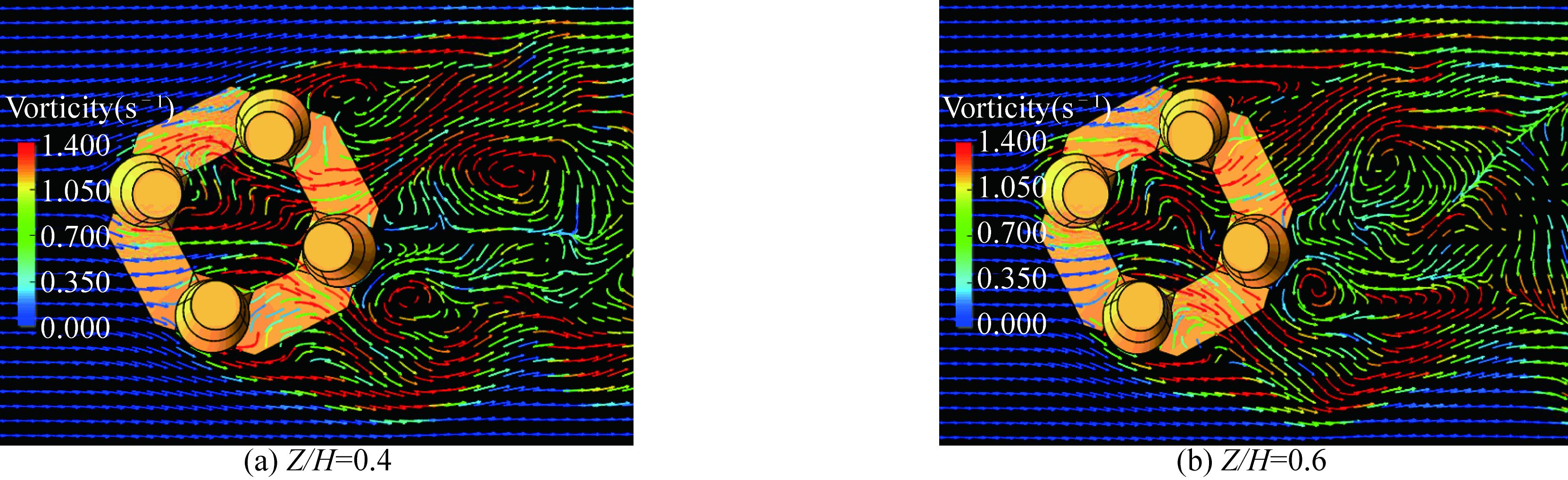
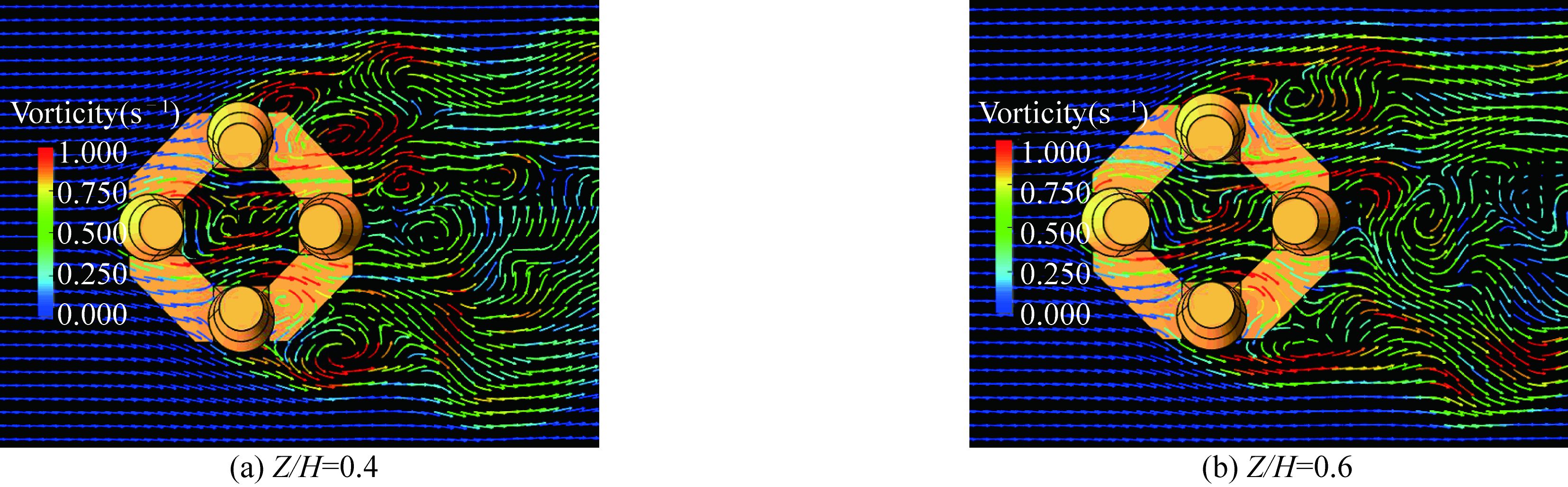
A numerical simulation and an experimental study on vortex-induced motion (VIM) of a new type of deep draft multi-columns floating drilling production, storage and offloading (FDPSO) are presented in this paper. The main dimension, the special variable cross-section column and the cabin arrangement of the octagonal pontoon are introduced based on the result. The numerical simulation is adapted to study the effects of current incidence angles and reduced velocities on this platform’s sway motion response. The 300 m water depth equivalent truncated mooring system is adopted for the model tests. The model tests are carried out to check the reliability of numerical simulation. The results consist of surge, sway and yaw motions, as well as motion trajectories. The maximum sway amplitudes for different types of offshore platform is also studied. The main results show that the peak frequencies of sway motion under different current incidence angles and reduced velocities vary around the natural frequency. The analysis result of flow field indicates that the change of distribution of vortex in vertical presents significant influences on the VIM of platform. The trend of sway amplitude ratio curve of this new type FDPSO differs from the other types of platform. Under 45° current incidence angle, the sway amplitude of this new type of FDPSO is much smaller than those of other types of offshore platform at 4.4 ≤ Vr ≤ 8.9. The typical ‘8’ shape trajectory does not appear in the platform’s motion trajectories.
A numerical simulation and an experimental study on vortex-induced motion (VIM) of a new type of deep draft multi-columns floating drilling production, storage and offloading (FDPSO) are presented in this paper. The main dimension, the special variable cross-section column and the cabin arrangement of the octagonal pontoon are introduced based on the result. The numerical simulation is adapted to study the effects of current incidence angles and reduced velocities on this platform’s sway motion response. The 300 m water depth equivalent truncated mooring system is adopted for the model tests. The model tests are carried out to check the reliability of numerical simulation. The results consist of surge, sway and yaw motions, as well as motion trajectories. The maximum sway amplitudes for different types of offshore platform is also studied. The main results show that the peak frequencies of sway motion under different current incidence angles and reduced velocities vary around the natural frequency. The analysis result of flow field indicates that the change of distribution of vortex in vertical presents significant influences on the VIM of platform. The trend of sway amplitude ratio curve of this new type FDPSO differs from the other types of platform. Under 45° current incidence angle, the sway amplitude of this new type of FDPSO is much smaller than those of other types of offshore platform at 4.4 ≤ Vr ≤ 8.9. The typical ‘8’ shape trajectory does not appear in the platform’s motion trajectories.
2018, 32(1): 14-25.
doi: 10.1007/s13344-018-0002-4
Abstract:
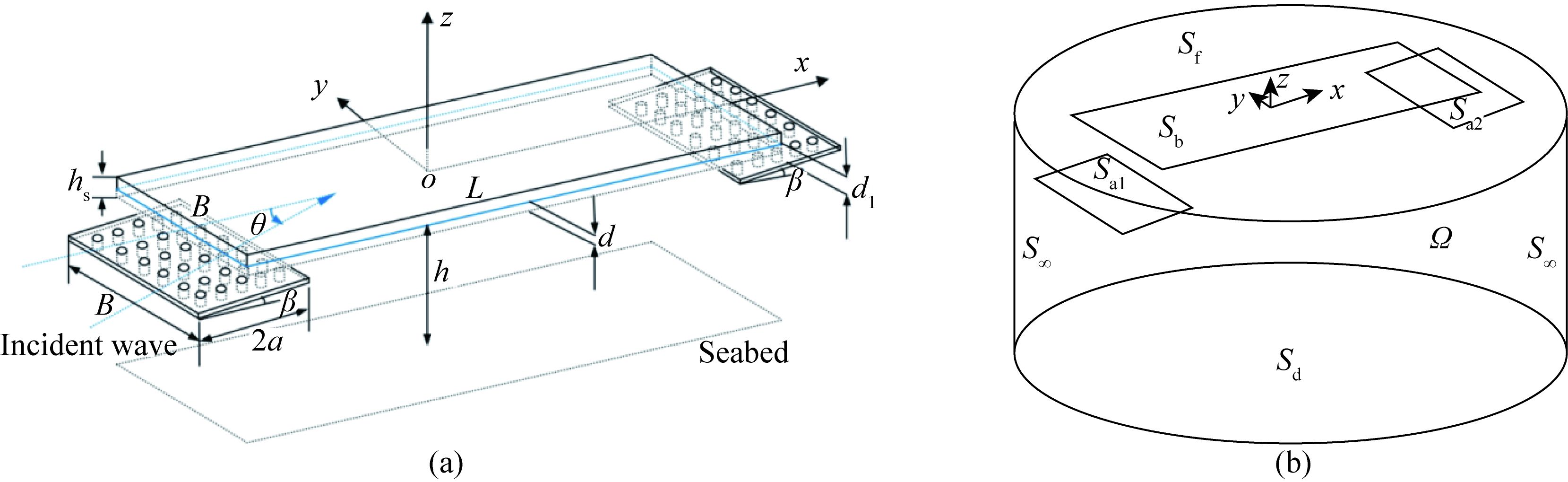
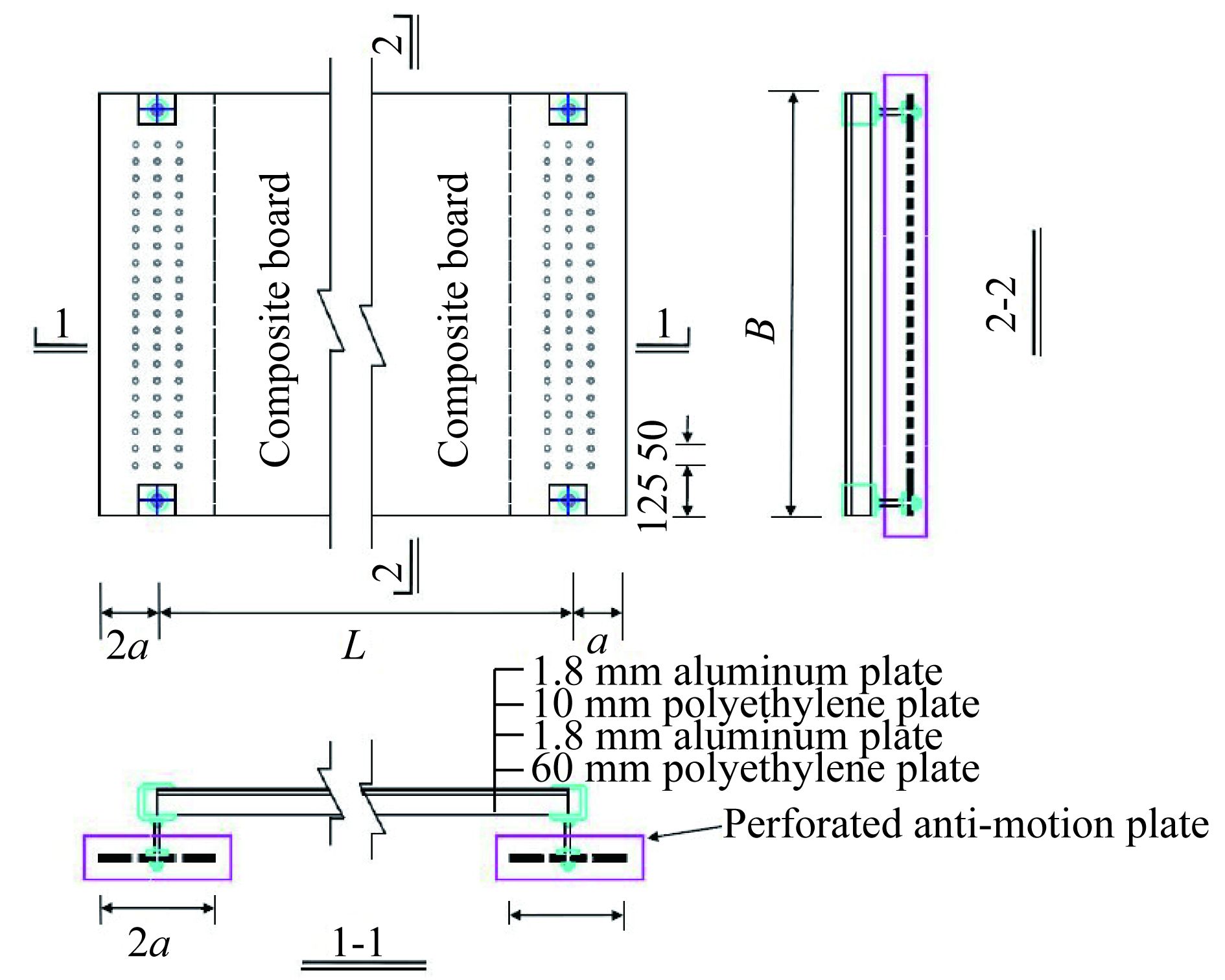
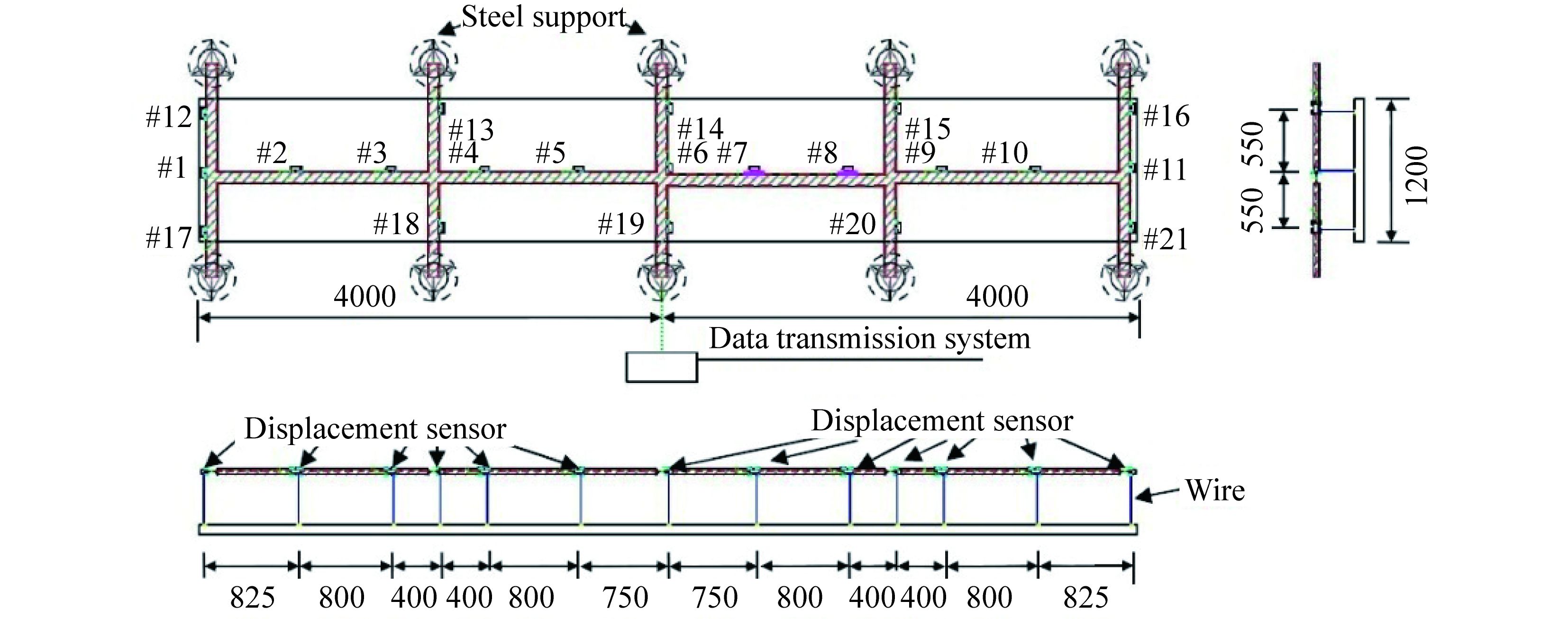
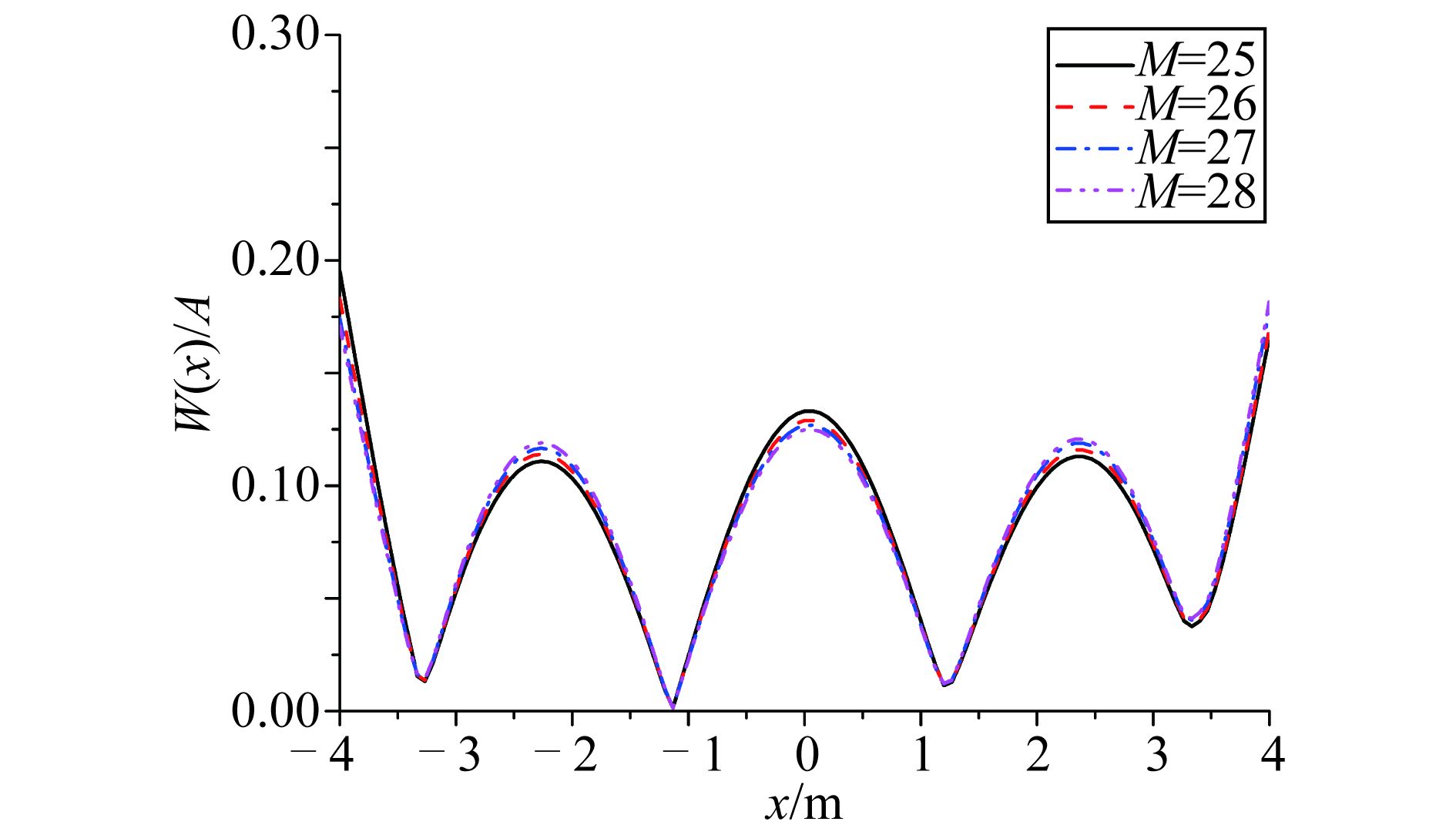
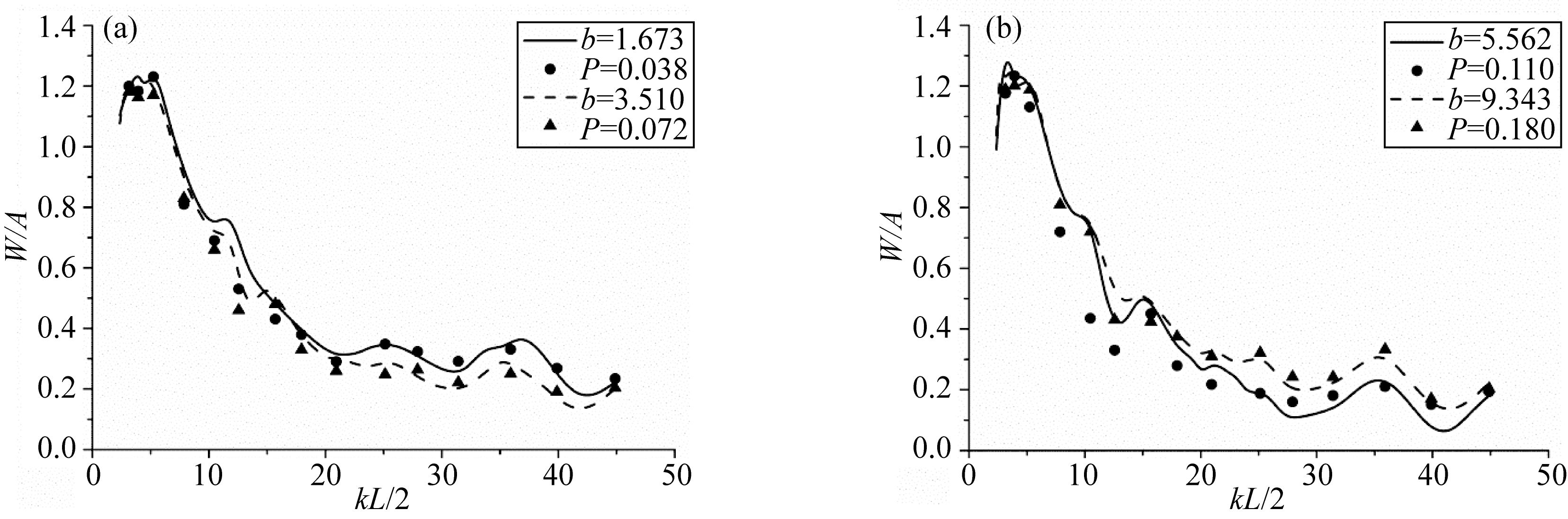
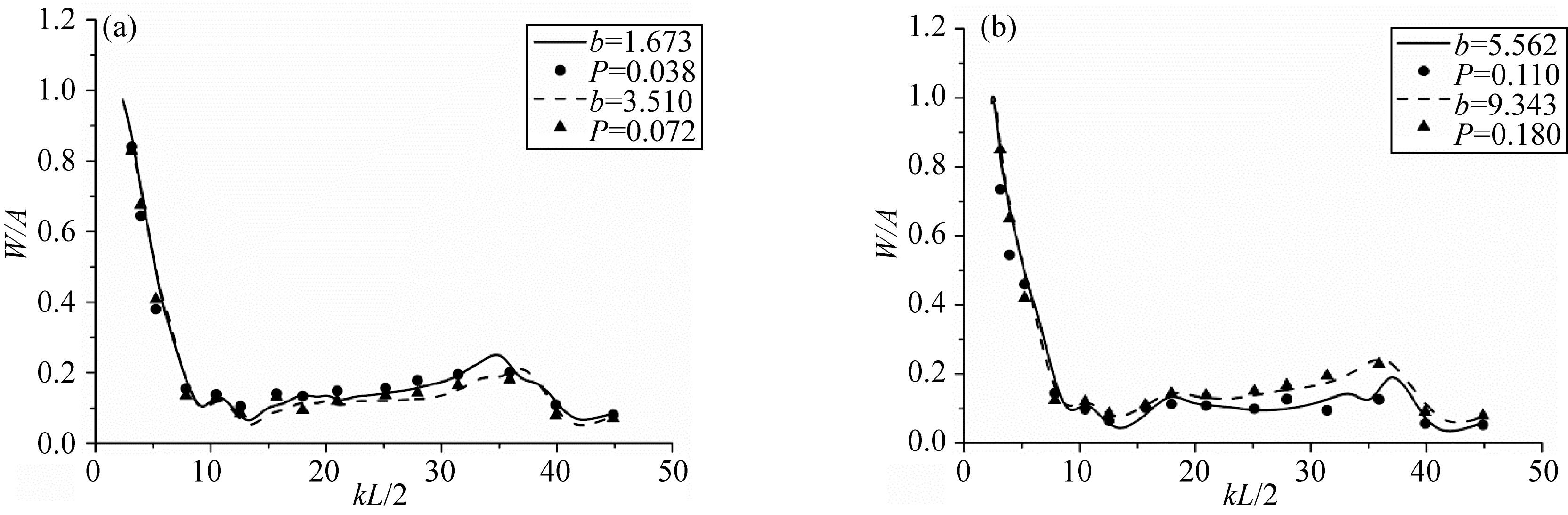
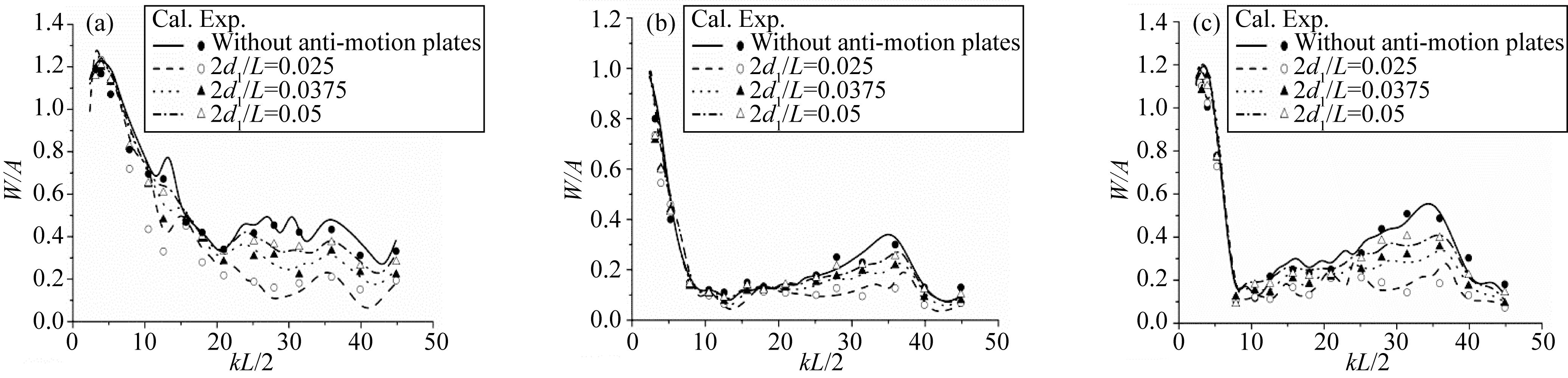
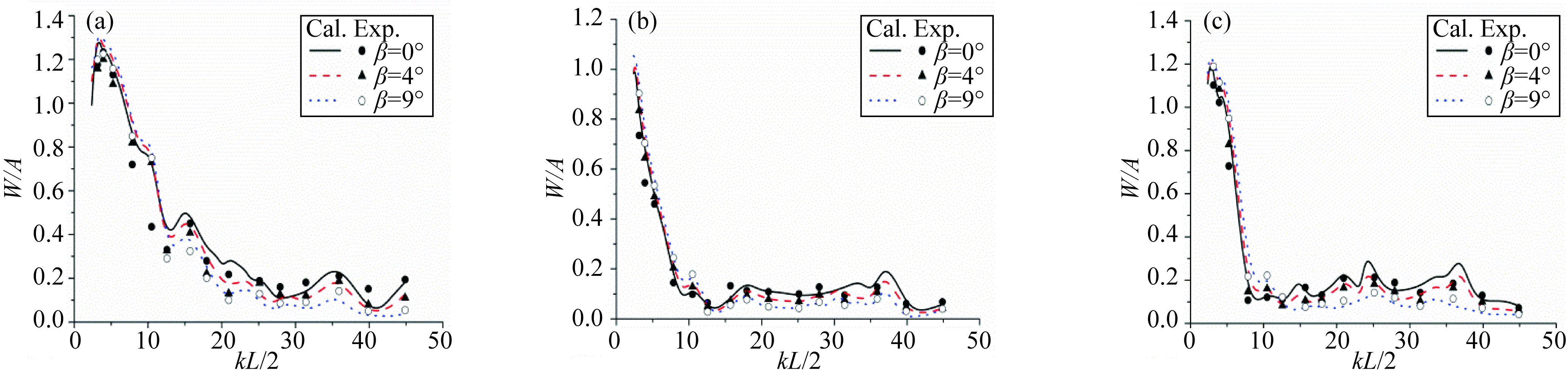
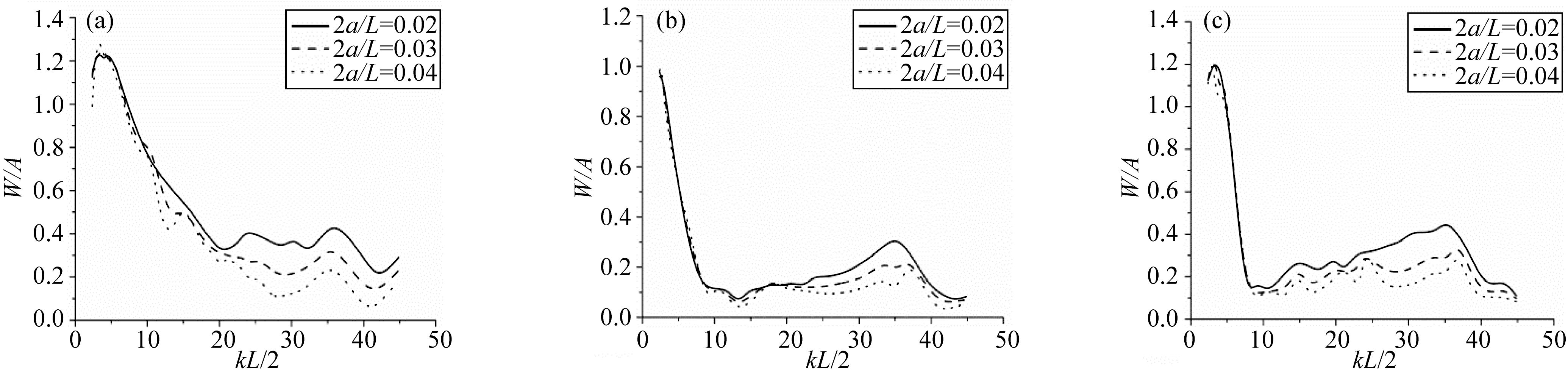
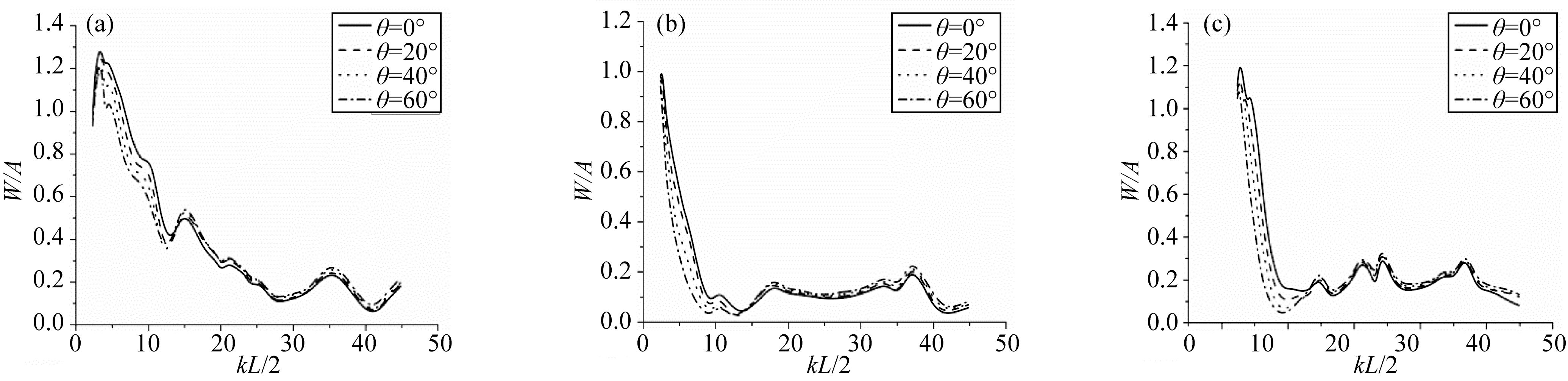
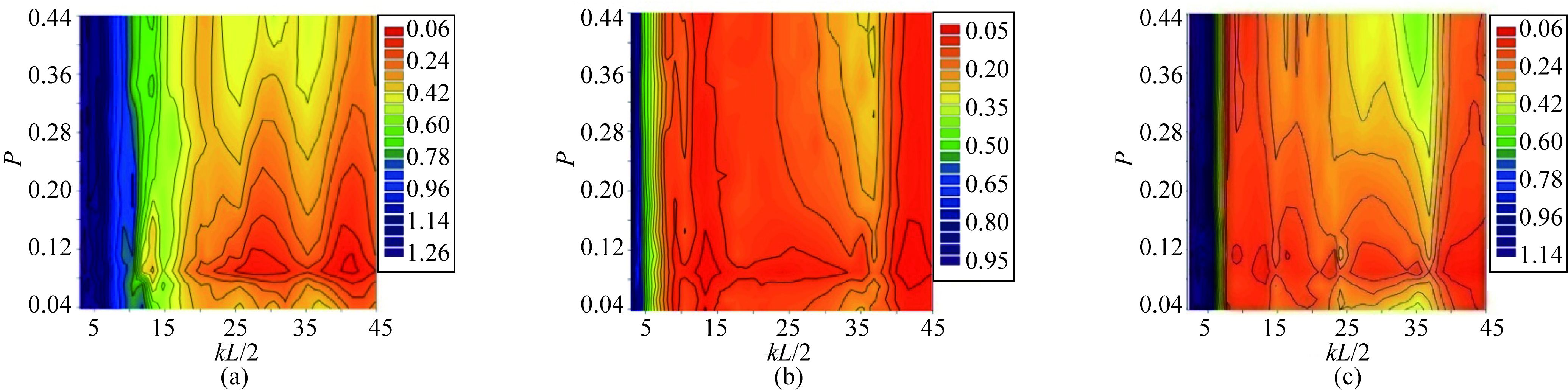
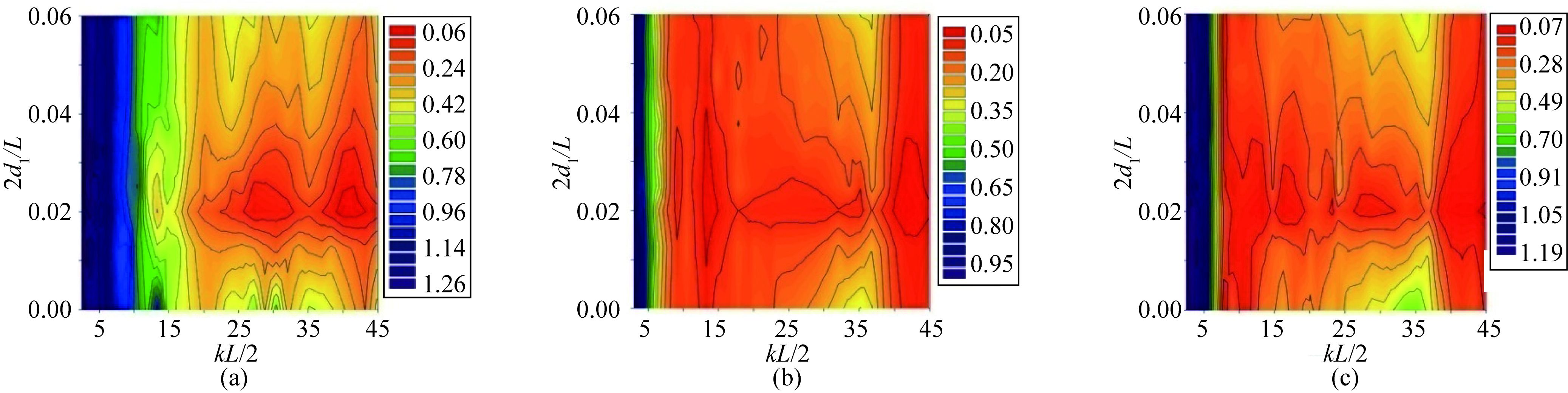
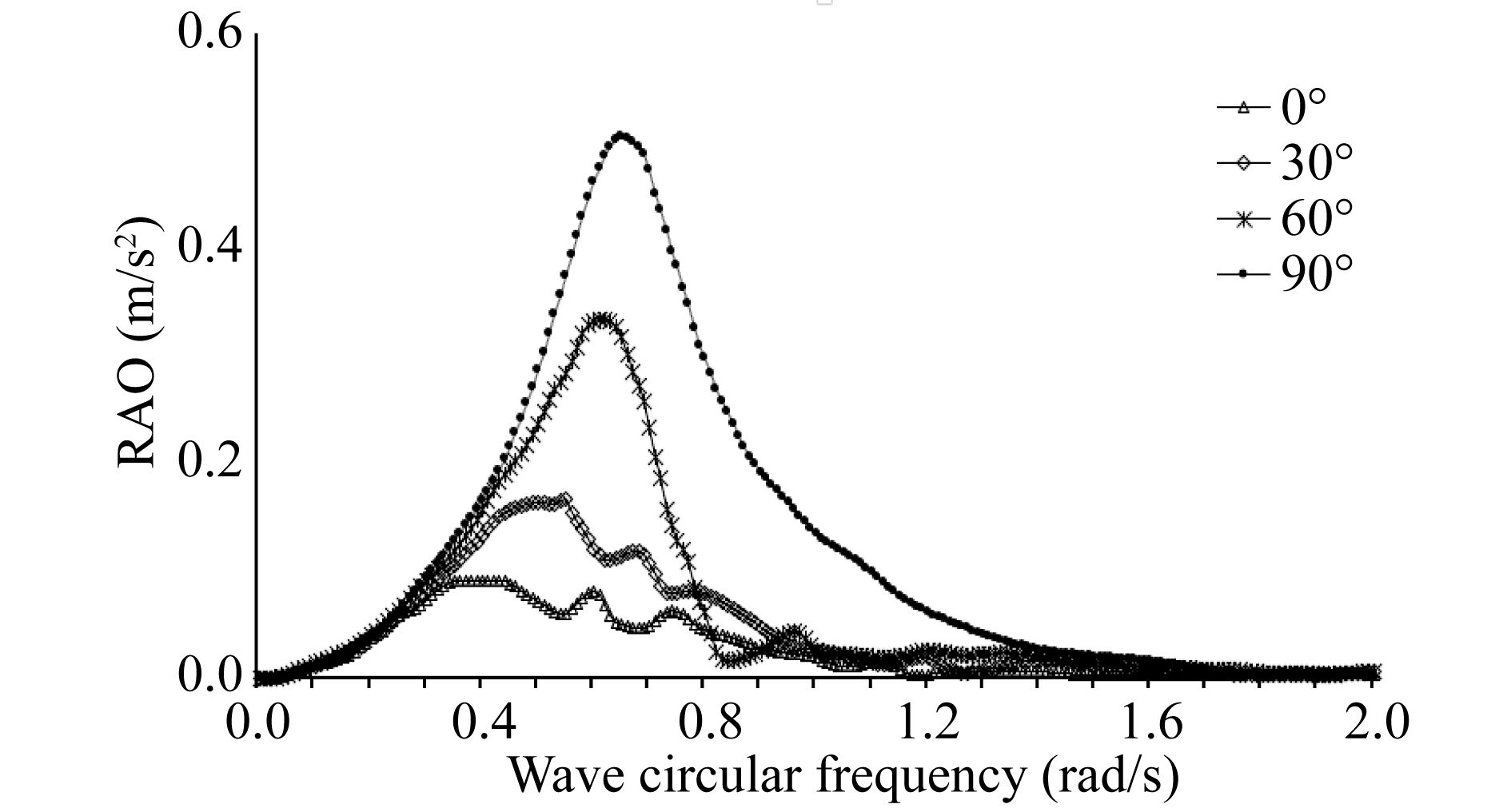
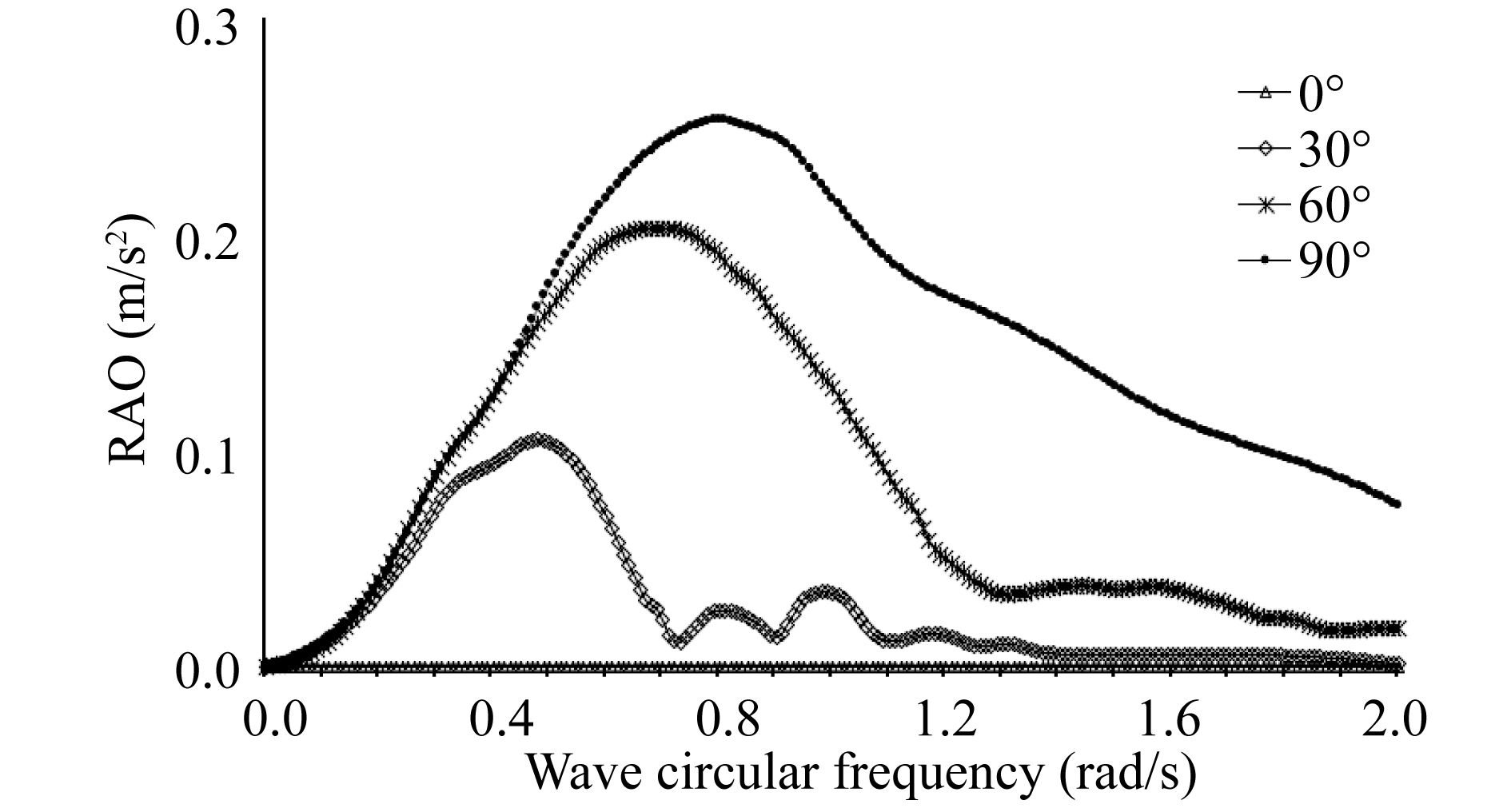
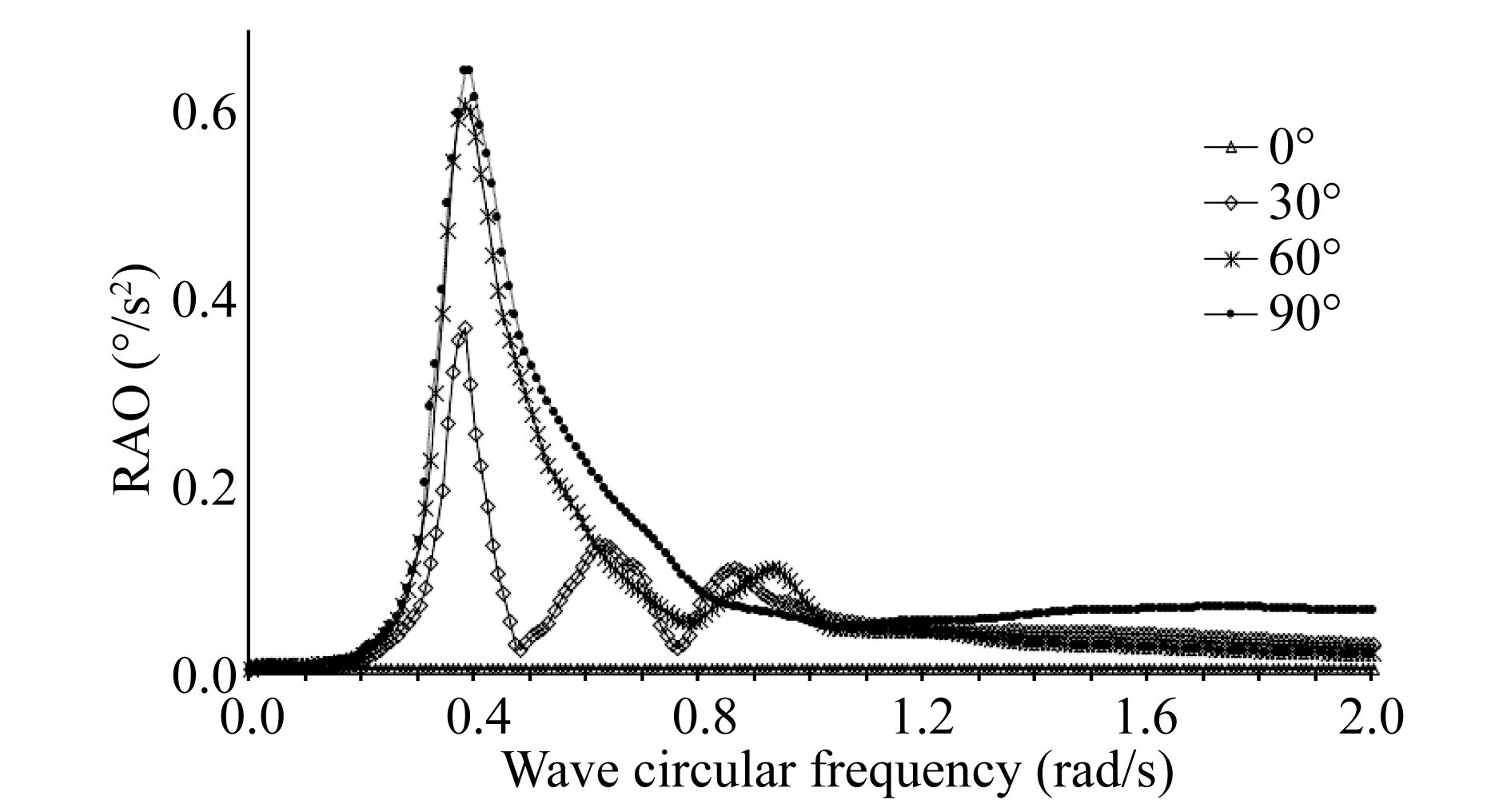
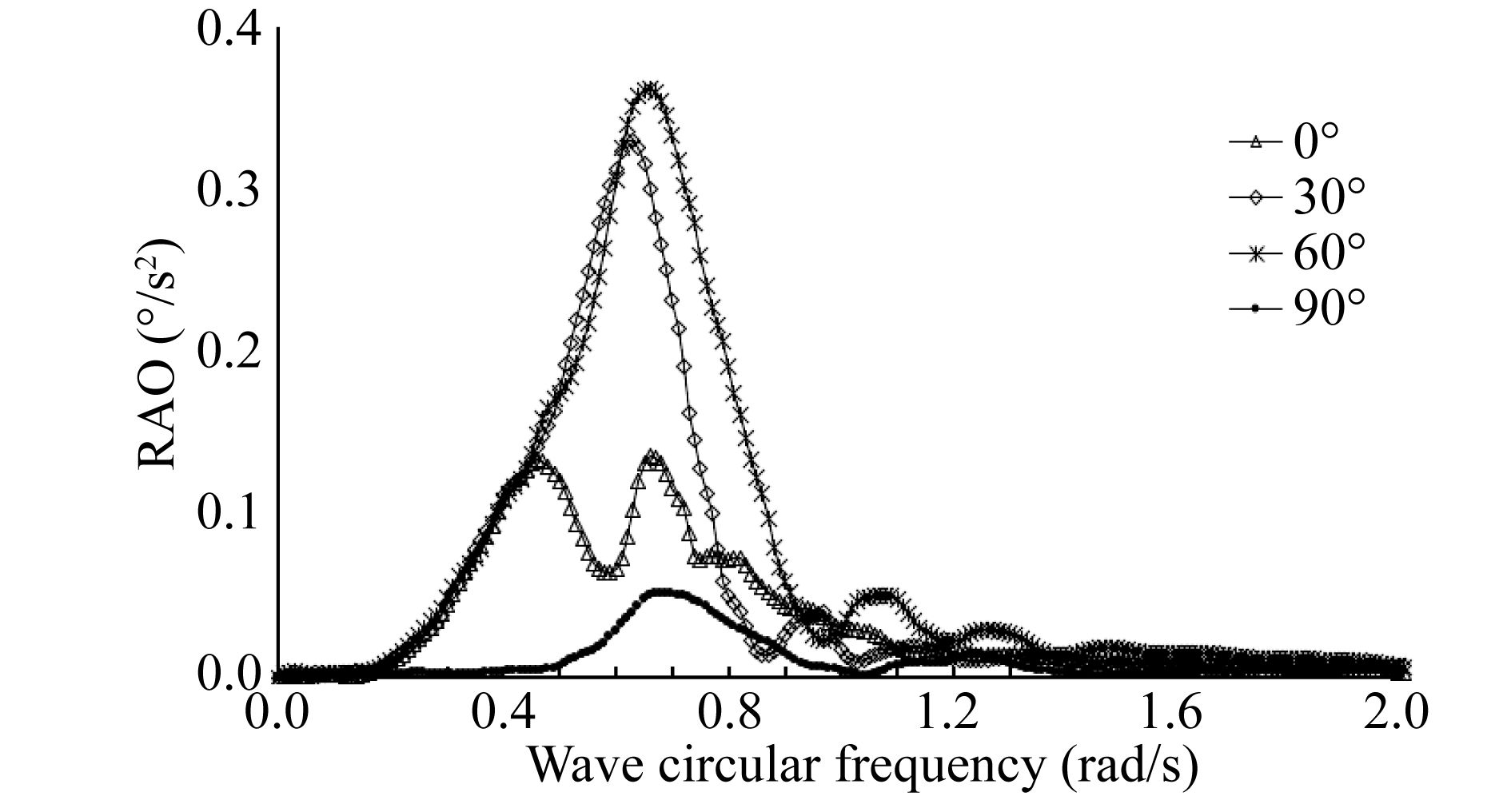
This paper is concerned with the hydroelastic responses of a mat-like, rectangular very large floating structure (VLFS) edged with a pair of horizontal/inclined perforated anti-motion plates in the context of the direct coupling method. The updated Lagrangian formulae are applied to establish the equilibrium equations of the VLFS and the total potential formula is employed for fluids in the numerical model including the viscous effect of the perforated plates through the Darcy’s law. The hybrid finite element-boundary element (FE-BE) method is implemented to determine the response reduction of VLFS with attached perforated plates under various oblique incident waves. Also, the numerical solutions are validated against a series of experimental tests. The effectiveness of the attached perforated plates in reducing the deflections of the VLFS can be significantly improved by selecting the proper design parameters such as the porous parameter, submergence depth, plate width and inclination angle for the given sea conditions.
This paper is concerned with the hydroelastic responses of a mat-like, rectangular very large floating structure (VLFS) edged with a pair of horizontal/inclined perforated anti-motion plates in the context of the direct coupling method. The updated Lagrangian formulae are applied to establish the equilibrium equations of the VLFS and the total potential formula is employed for fluids in the numerical model including the viscous effect of the perforated plates through the Darcy’s law. The hybrid finite element-boundary element (FE-BE) method is implemented to determine the response reduction of VLFS with attached perforated plates under various oblique incident waves. Also, the numerical solutions are validated against a series of experimental tests. The effectiveness of the attached perforated plates in reducing the deflections of the VLFS can be significantly improved by selecting the proper design parameters such as the porous parameter, submergence depth, plate width and inclination angle for the given sea conditions.

2018, 32(1): 26-31.
doi: 10.1007/s13344-018-0003-3
Abstract:
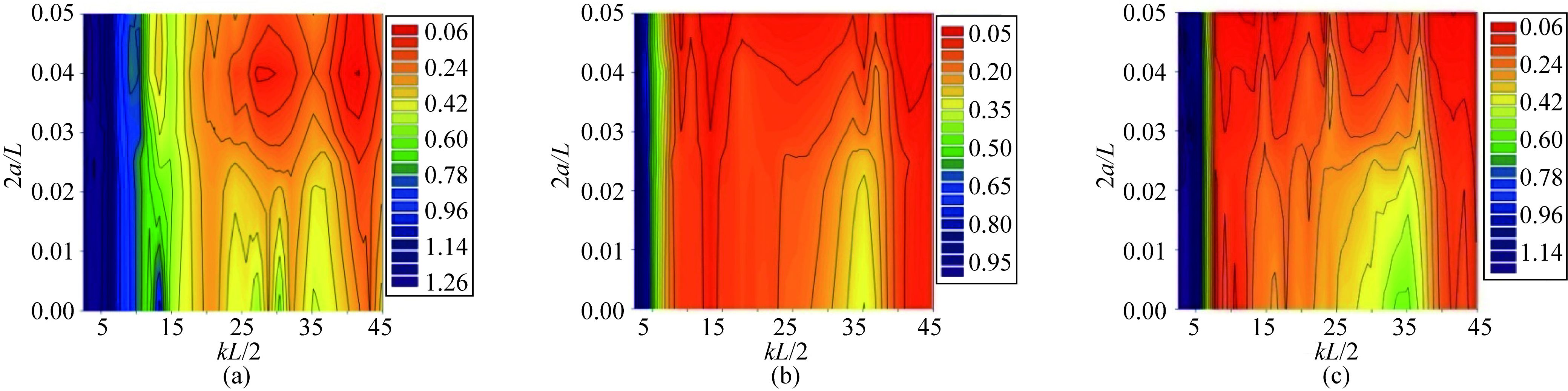
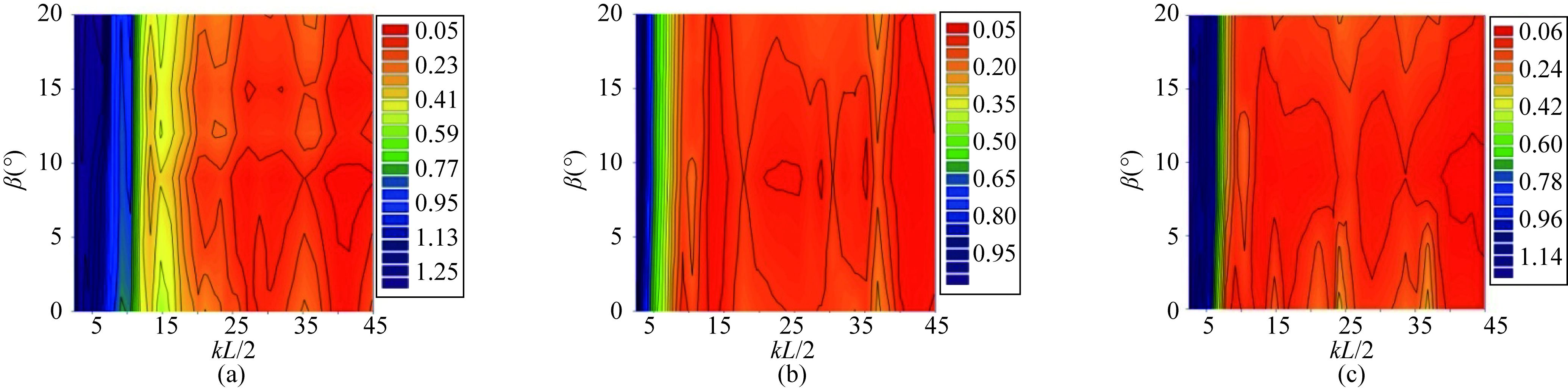
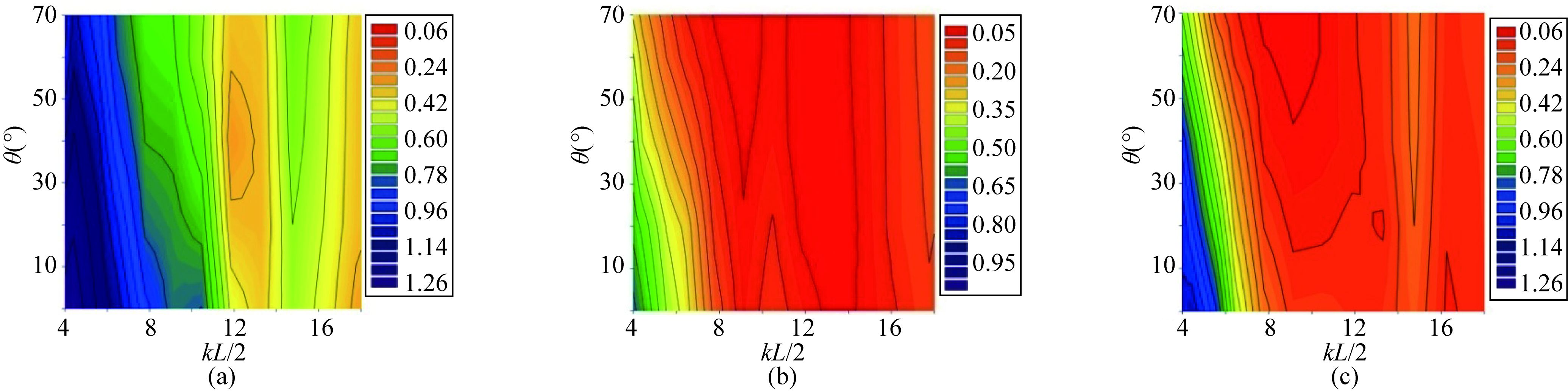
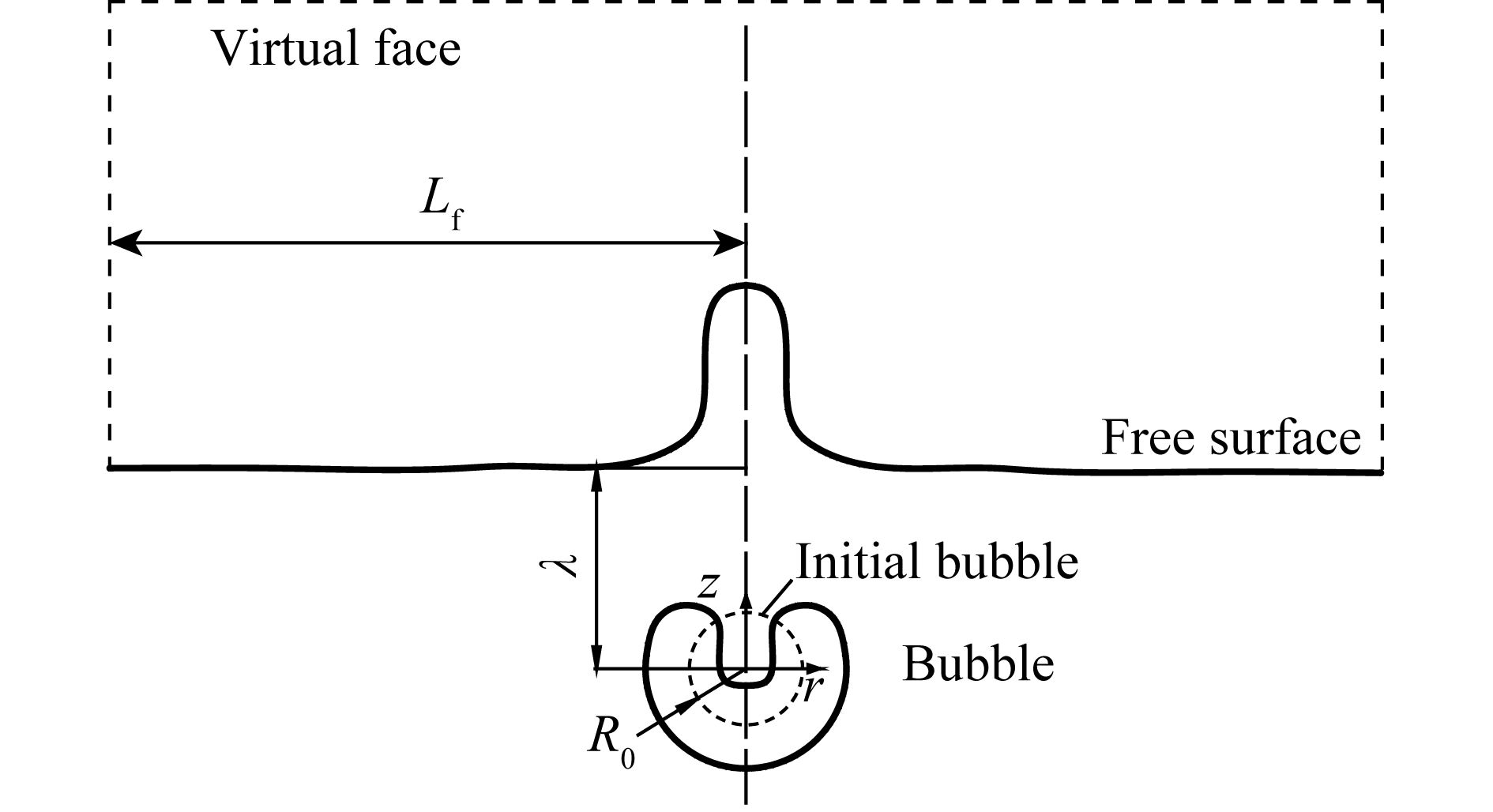
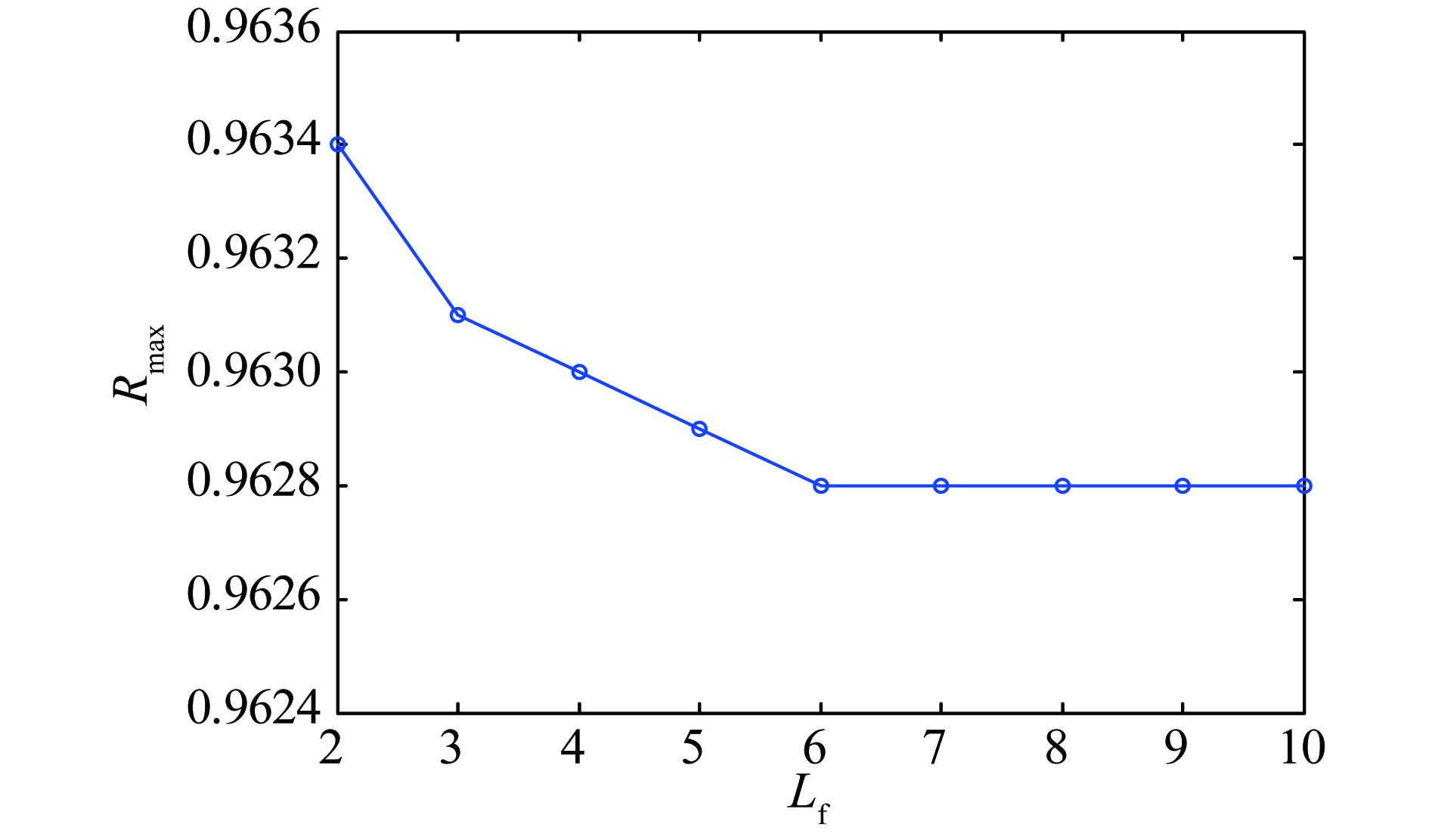
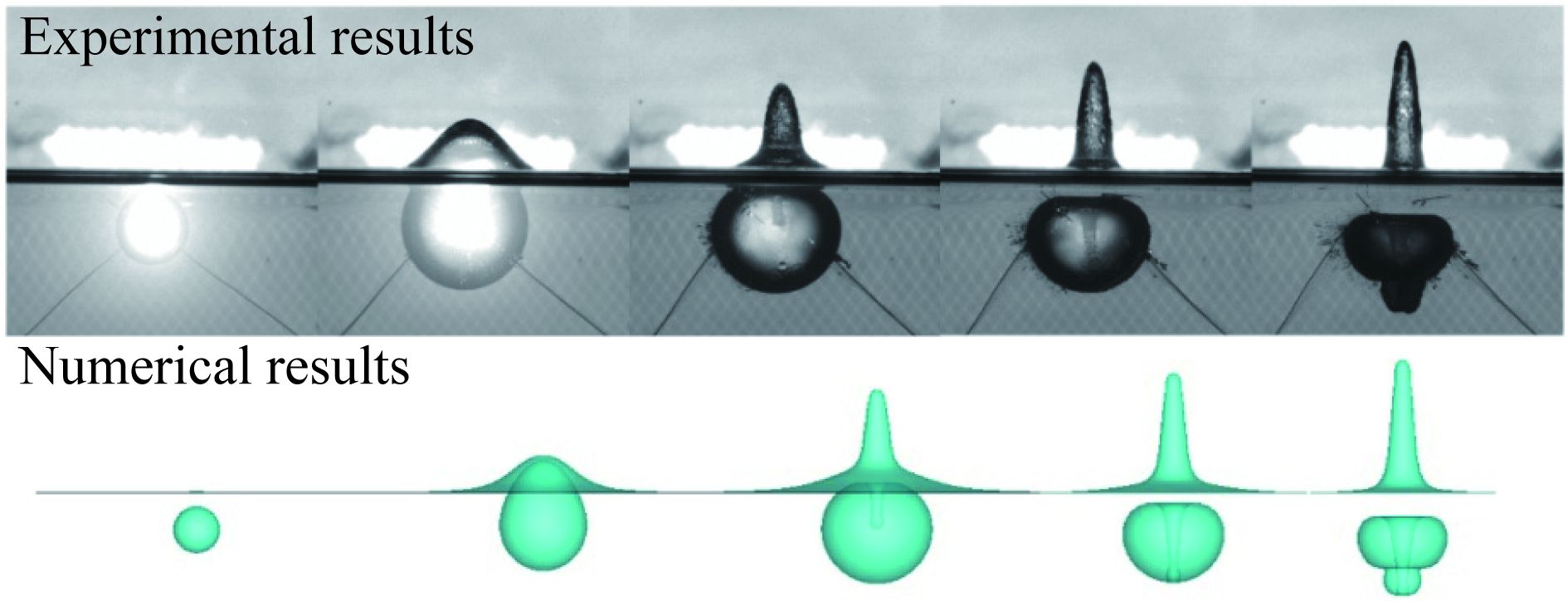
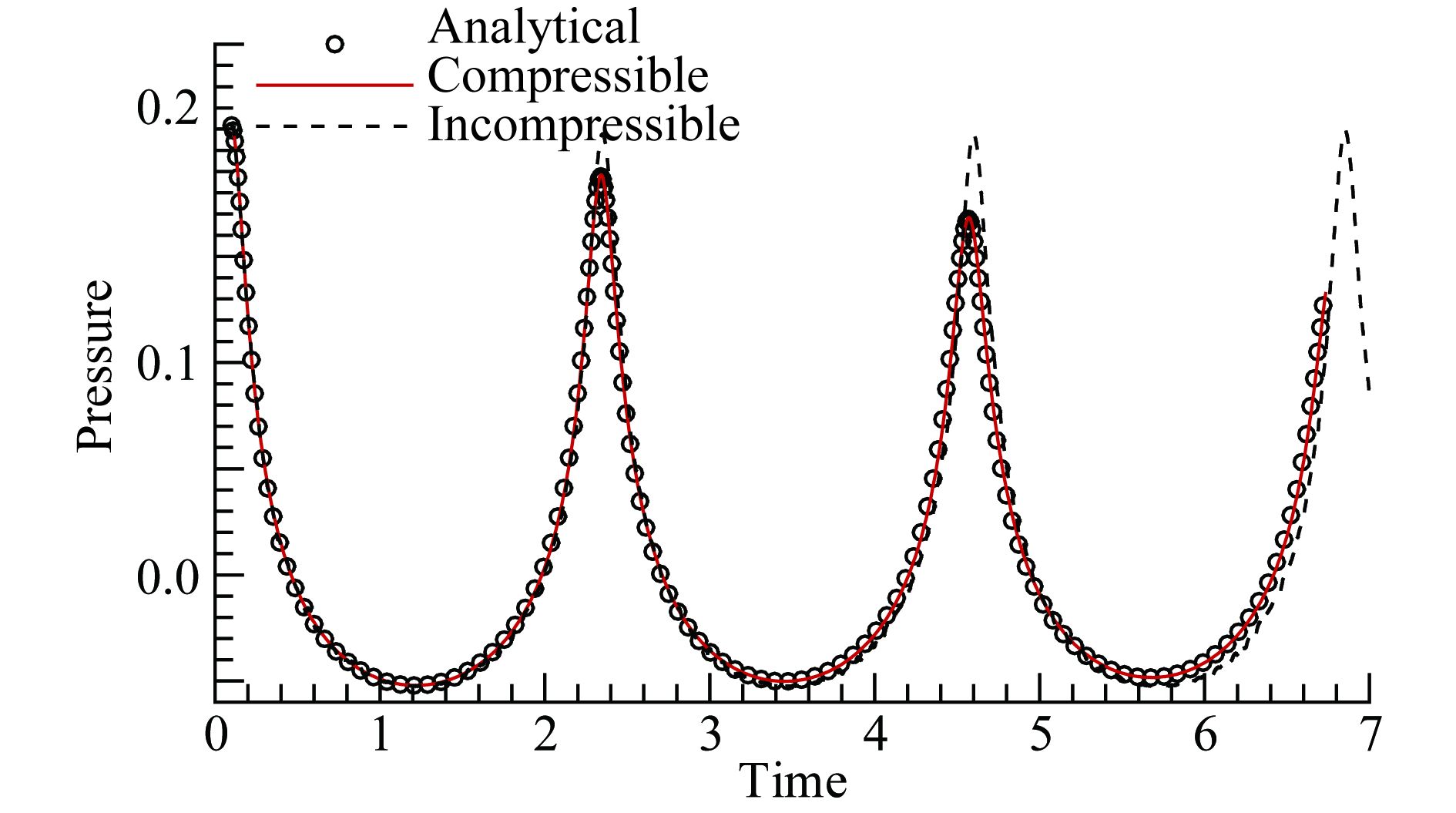
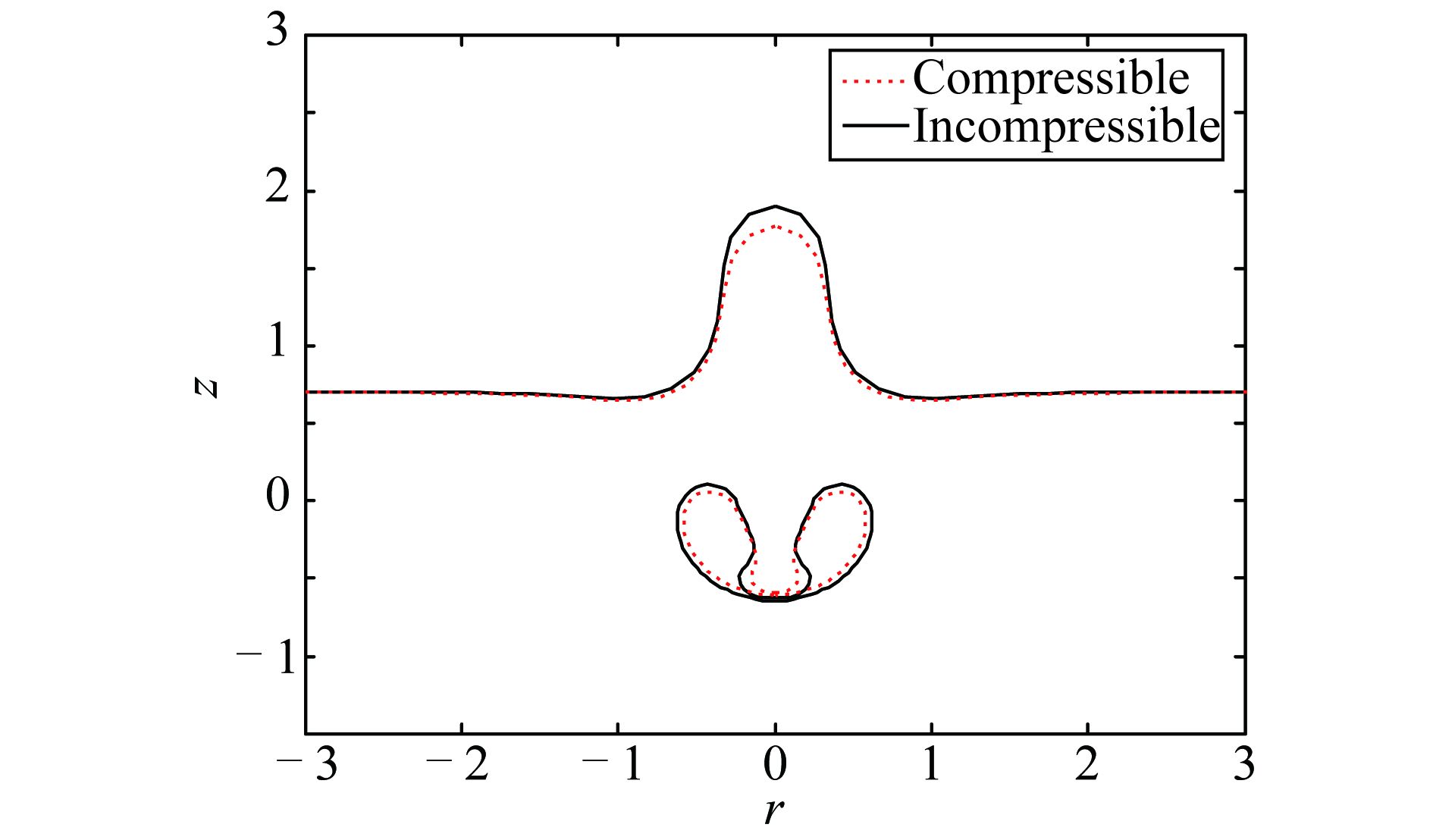
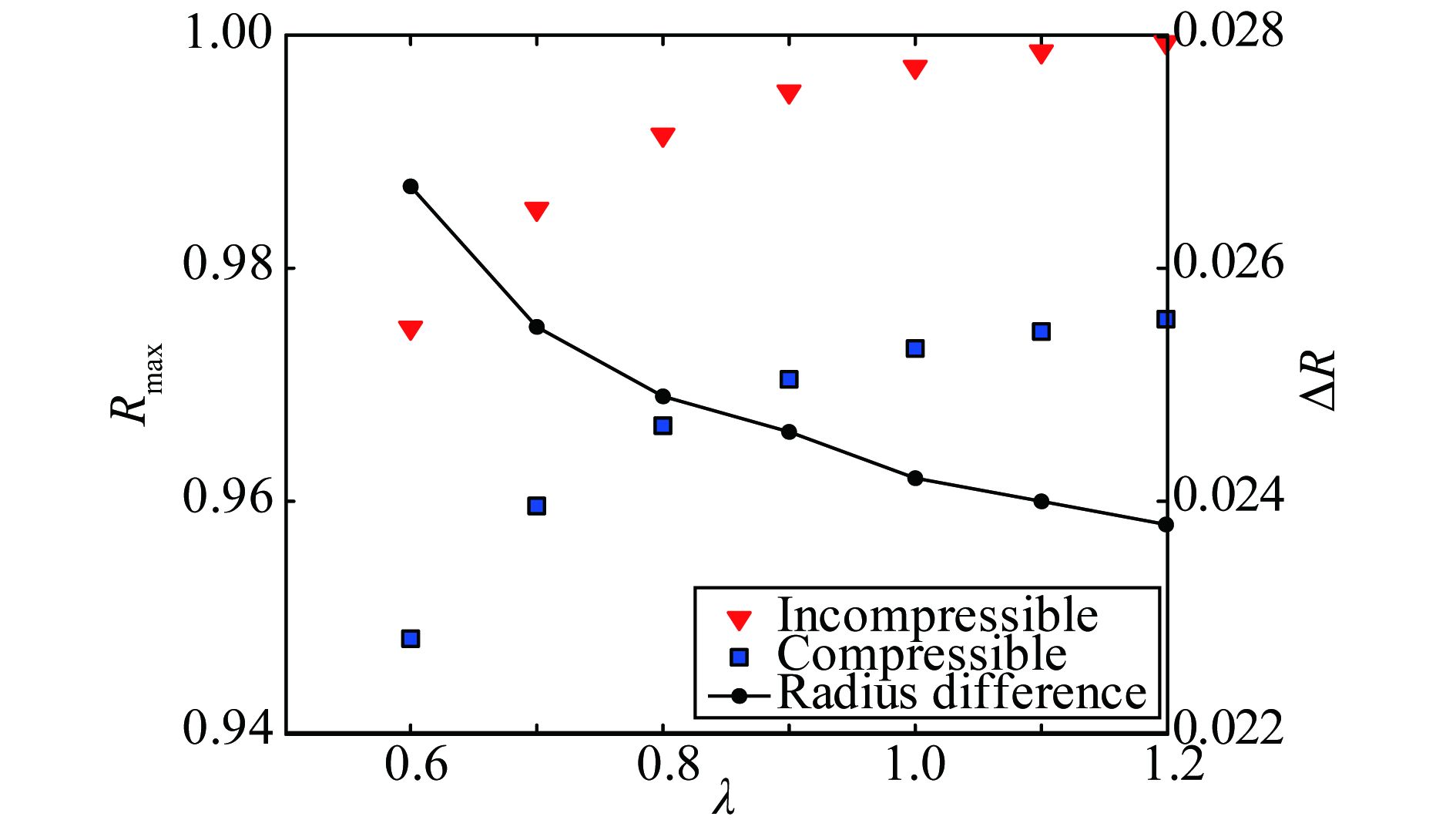
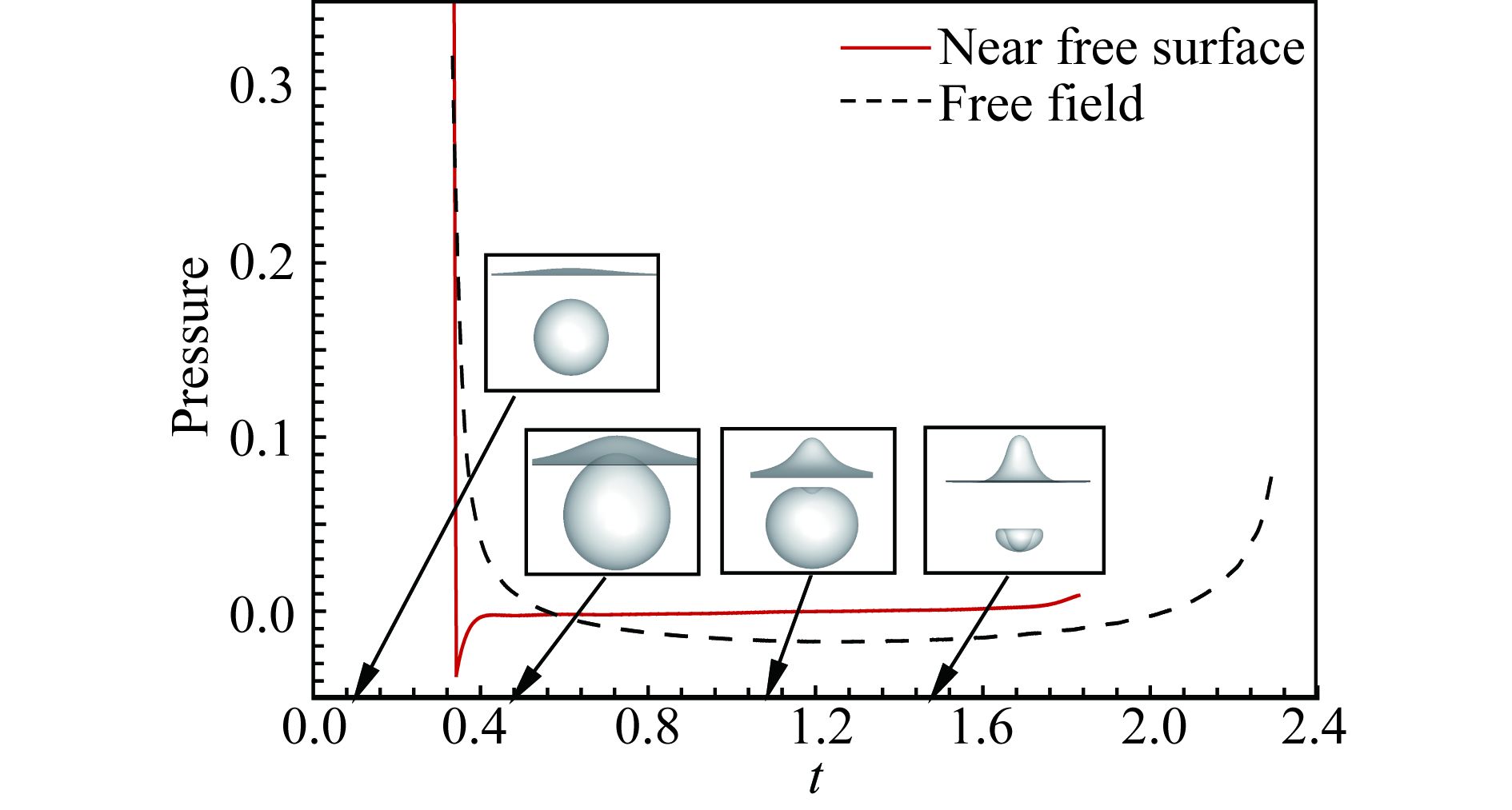
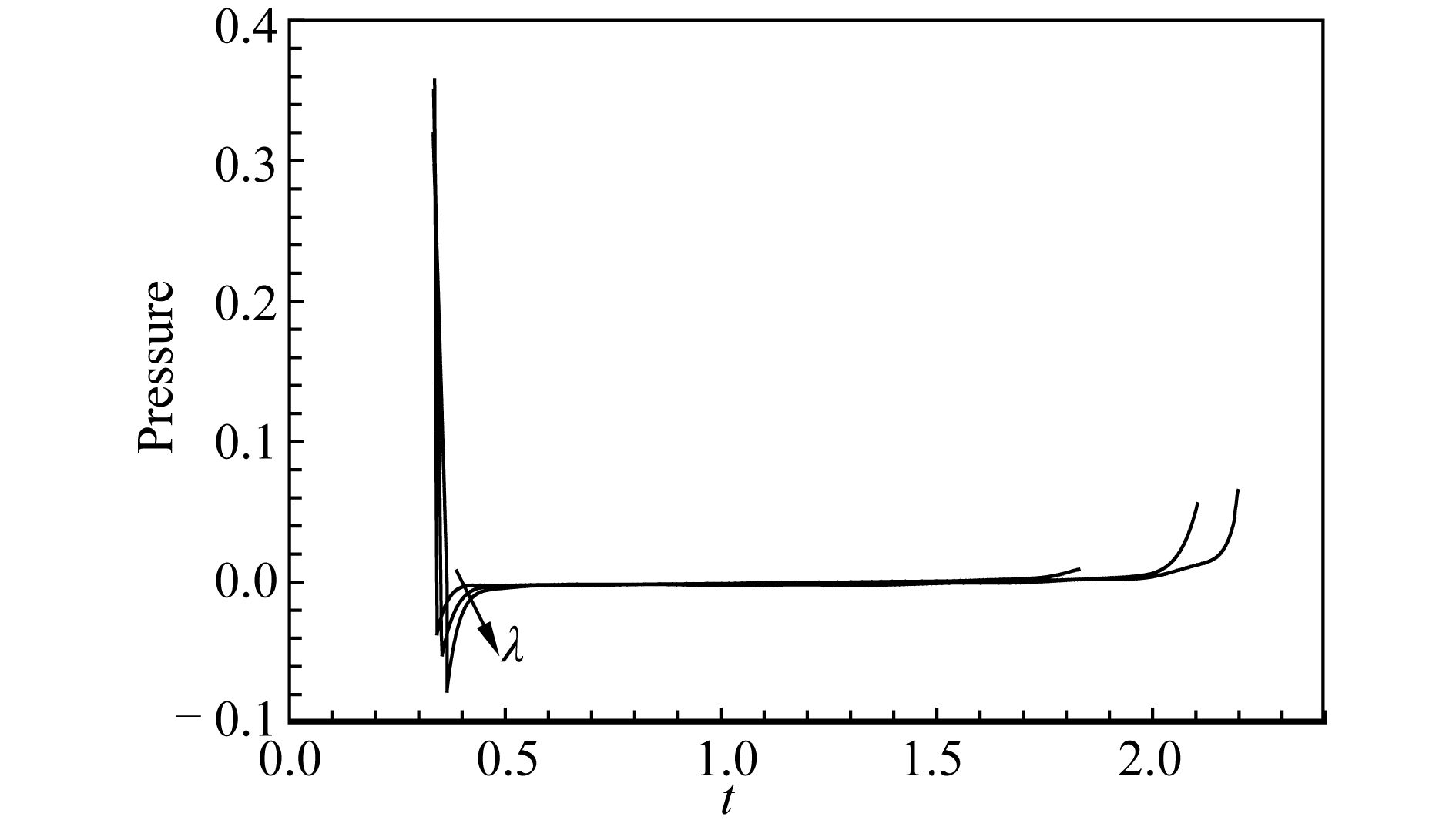
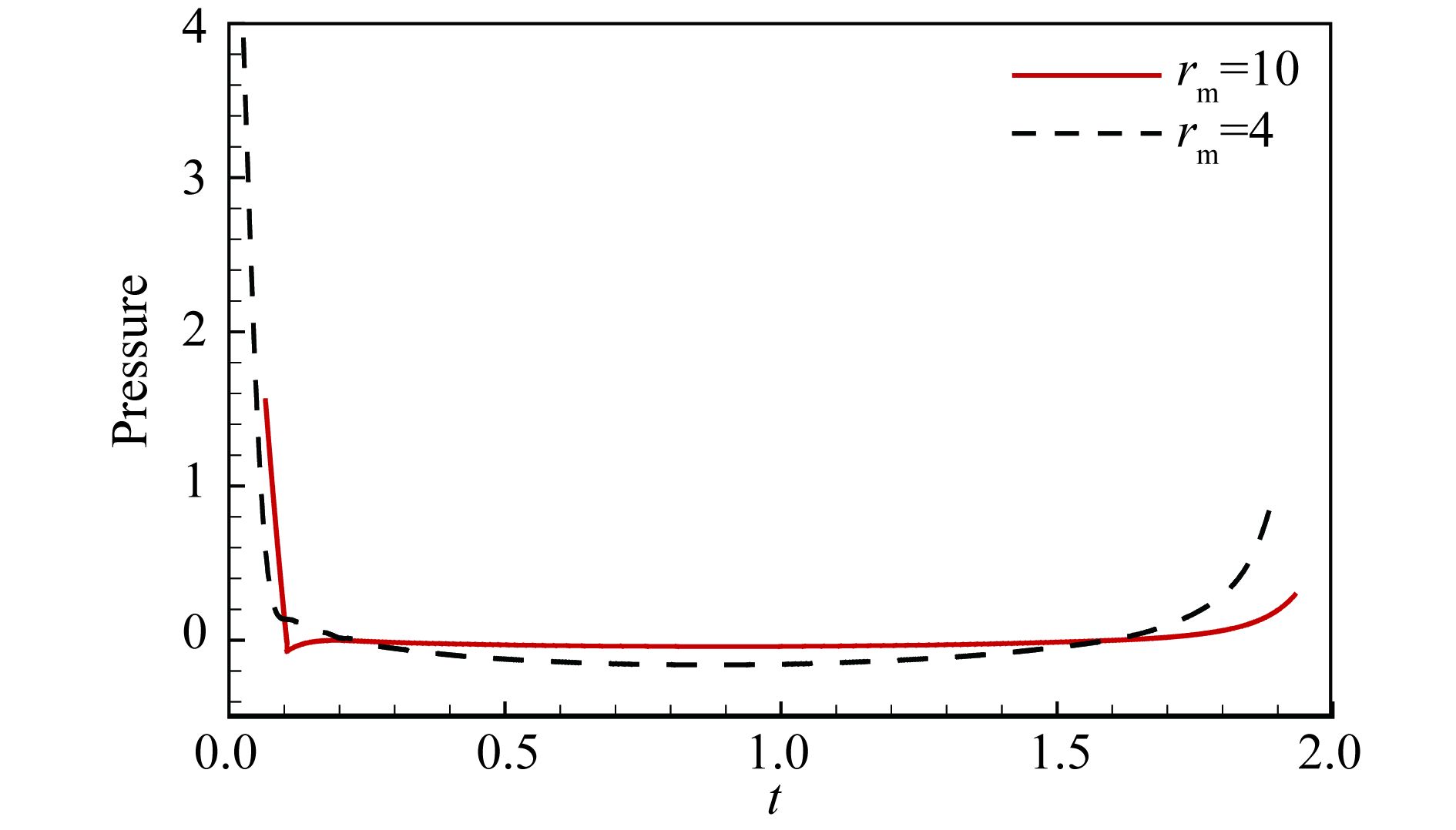
The motion of a bubble near the free surface is solved by the boundary element method based on the linear wave equation, and the influence of fluid compressibility on bubble dynamics is analyzed. Based on the solution of the bubble motion, the far-field radiation noise induced by the bubble is calculated using Kirchhoff moving boundary integral equation, and the influence of free surface on far-field noise is researched. As the results, the oscillation amplitude of the bubble is weakened in compressible fluid compared with that in incompressible fluid, and the free surface amplifies the effect of fluid compressibility. When the distance between the bubble and an observer is much larger than that between the bubble and free surface, the sharp wave trough of the sound pressure at the observer occurs. With the increment of the distance between the bubble and free surface, the time of the wave trough appearing is delayed and the value of the wave trough increase. When the distance between the observer and the bubble is reduced, the sharp wave trough at the observer disappears.
The motion of a bubble near the free surface is solved by the boundary element method based on the linear wave equation, and the influence of fluid compressibility on bubble dynamics is analyzed. Based on the solution of the bubble motion, the far-field radiation noise induced by the bubble is calculated using Kirchhoff moving boundary integral equation, and the influence of free surface on far-field noise is researched. As the results, the oscillation amplitude of the bubble is weakened in compressible fluid compared with that in incompressible fluid, and the free surface amplifies the effect of fluid compressibility. When the distance between the bubble and an observer is much larger than that between the bubble and free surface, the sharp wave trough of the sound pressure at the observer occurs. With the increment of the distance between the bubble and free surface, the time of the wave trough appearing is delayed and the value of the wave trough increase. When the distance between the observer and the bubble is reduced, the sharp wave trough at the observer disappears.
2018, 32(1): 32-40.
doi: 10.1007/s13344-018-0004-2
Abstract:
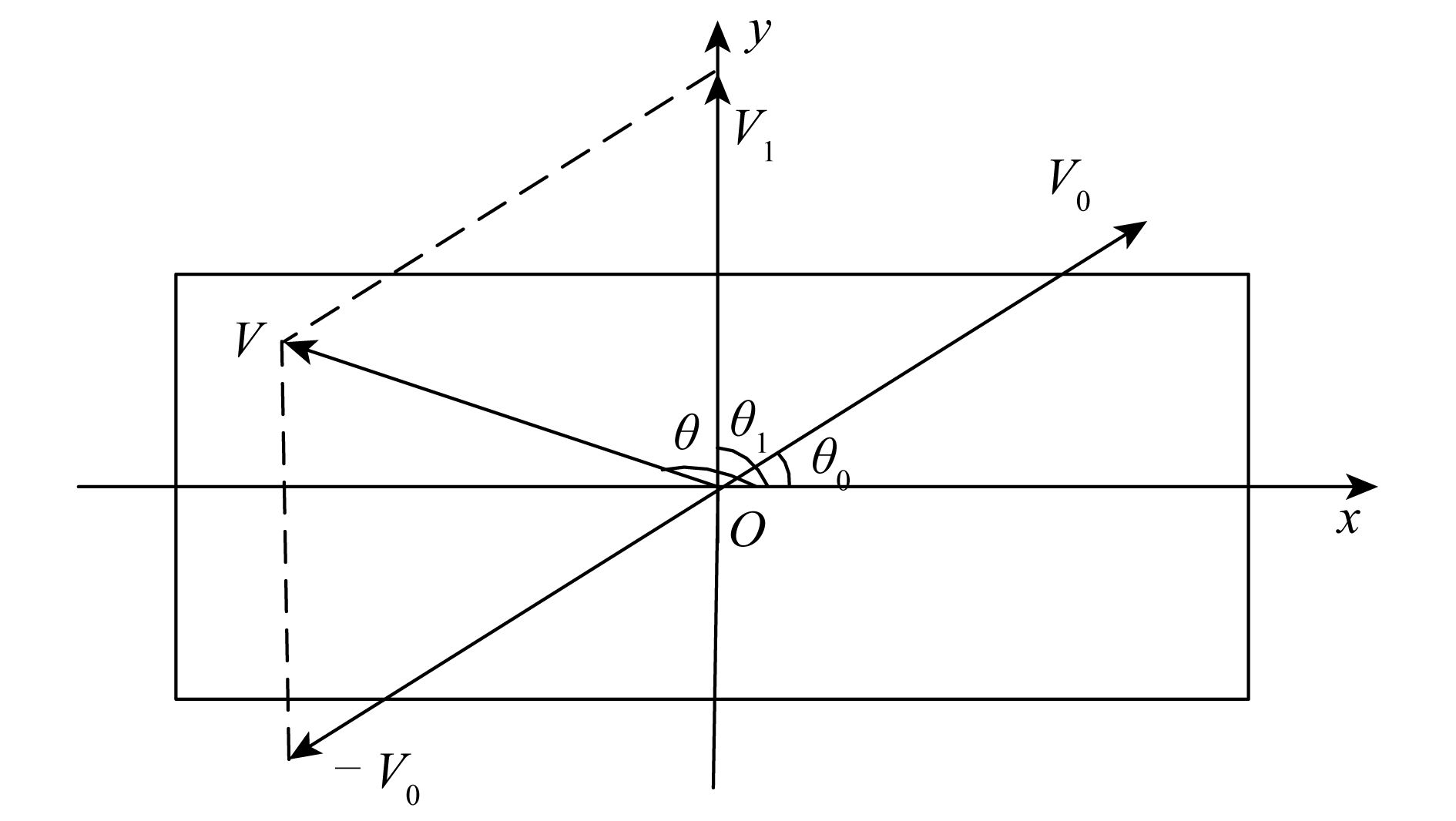
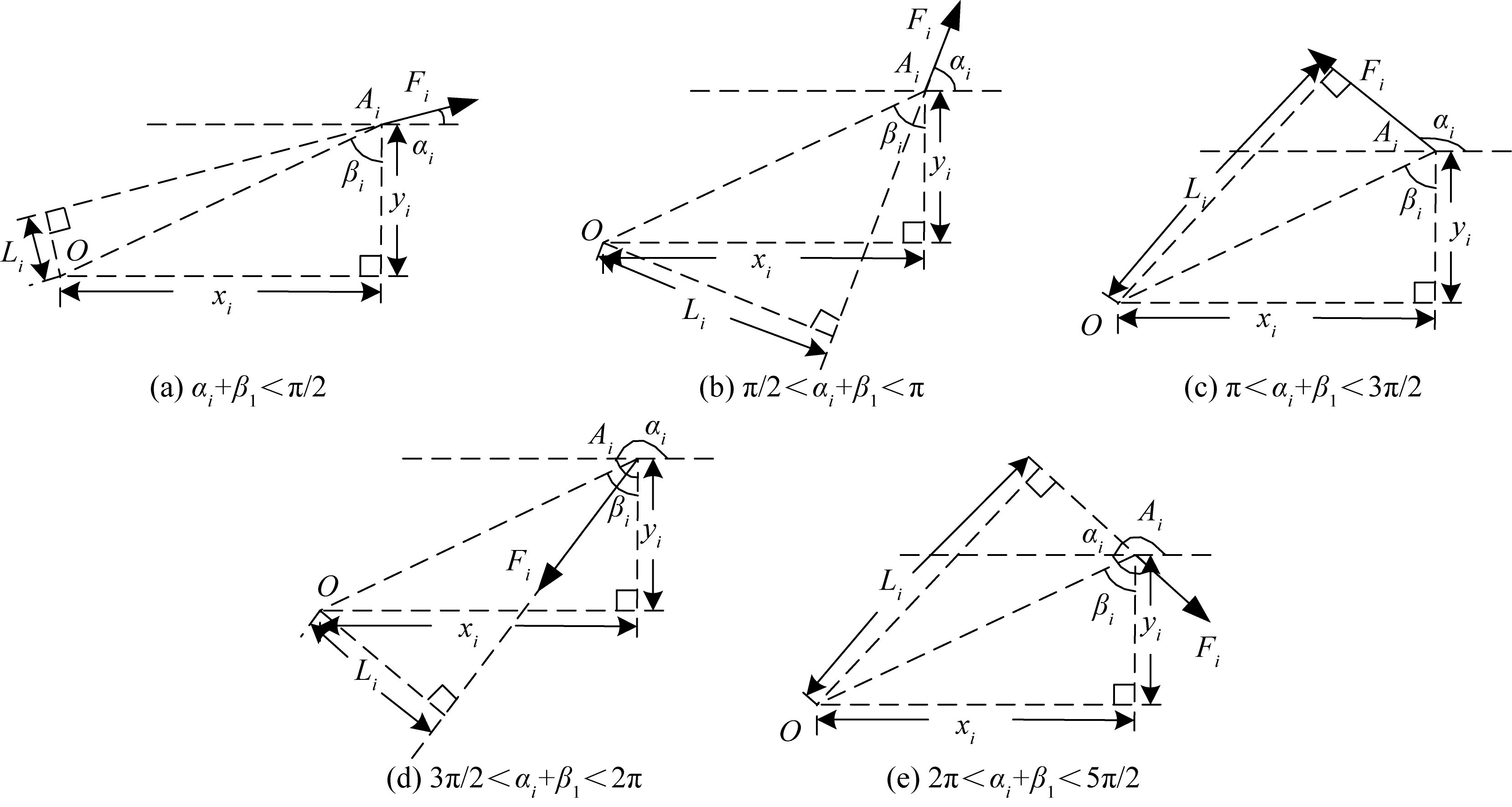
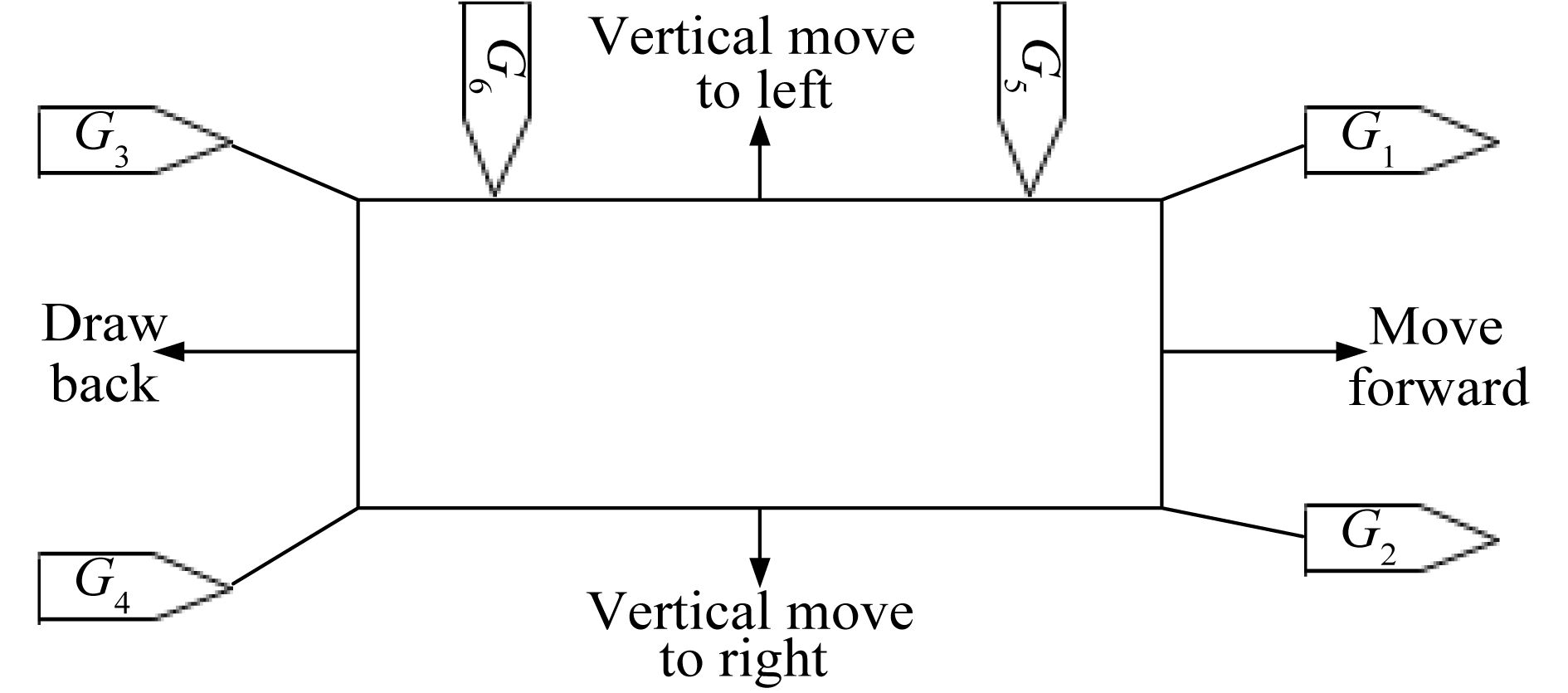
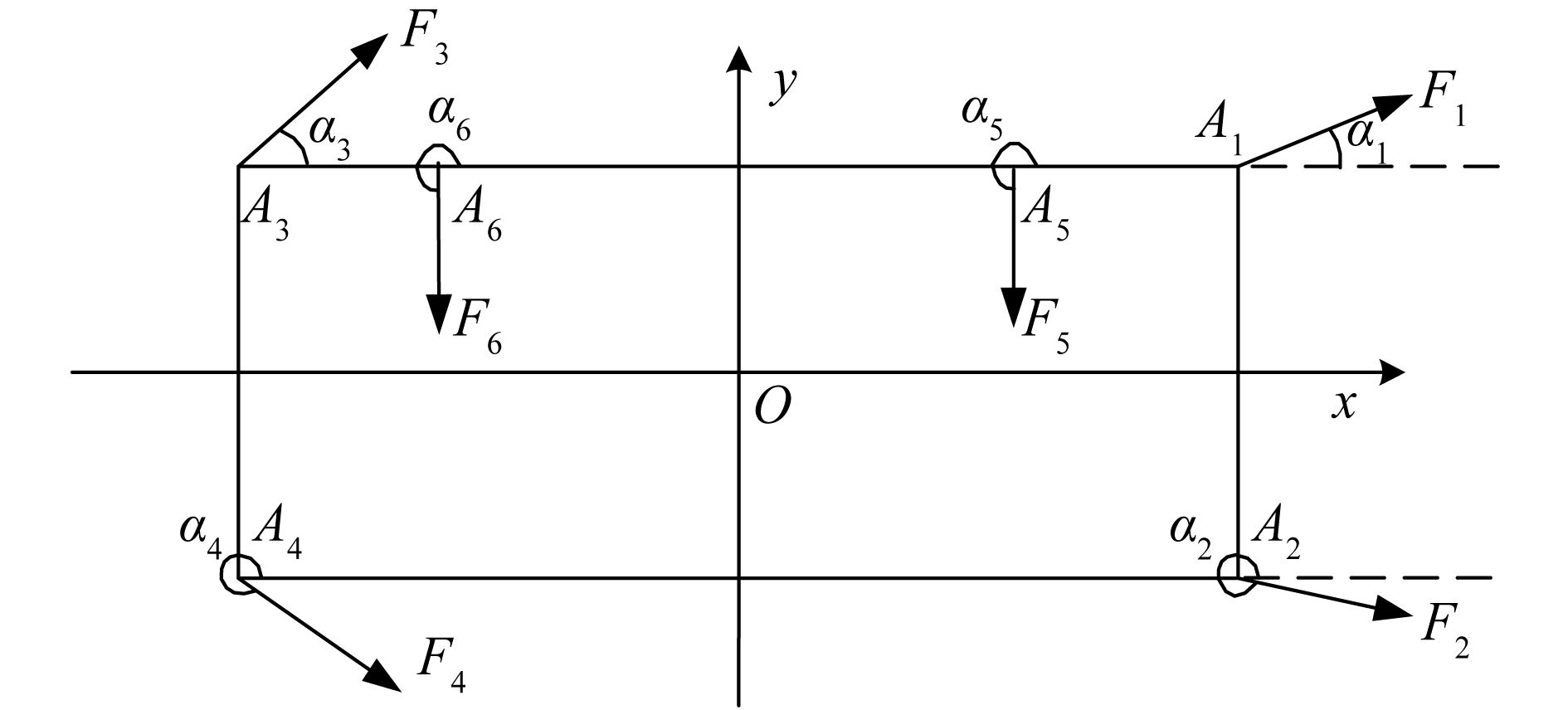
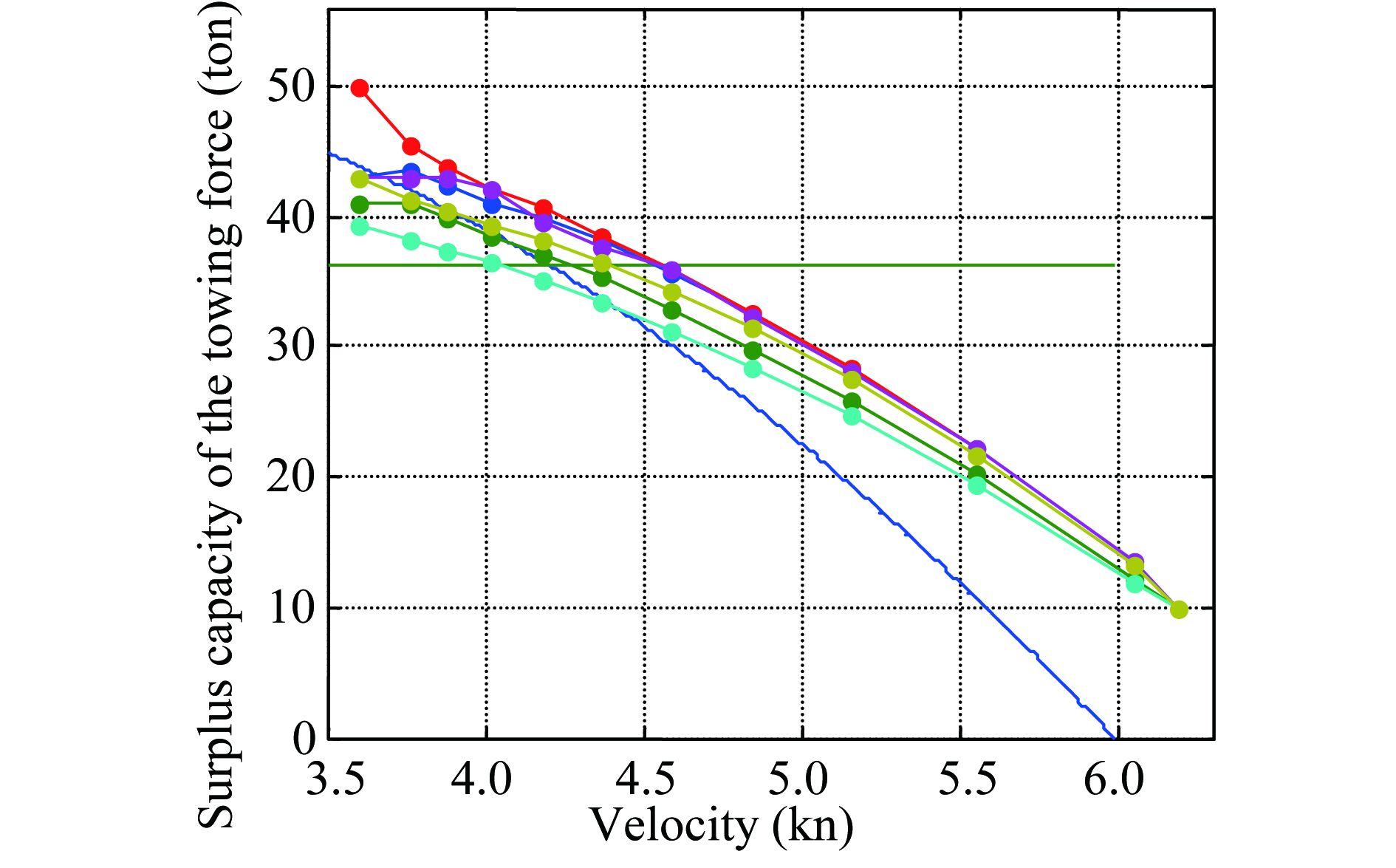
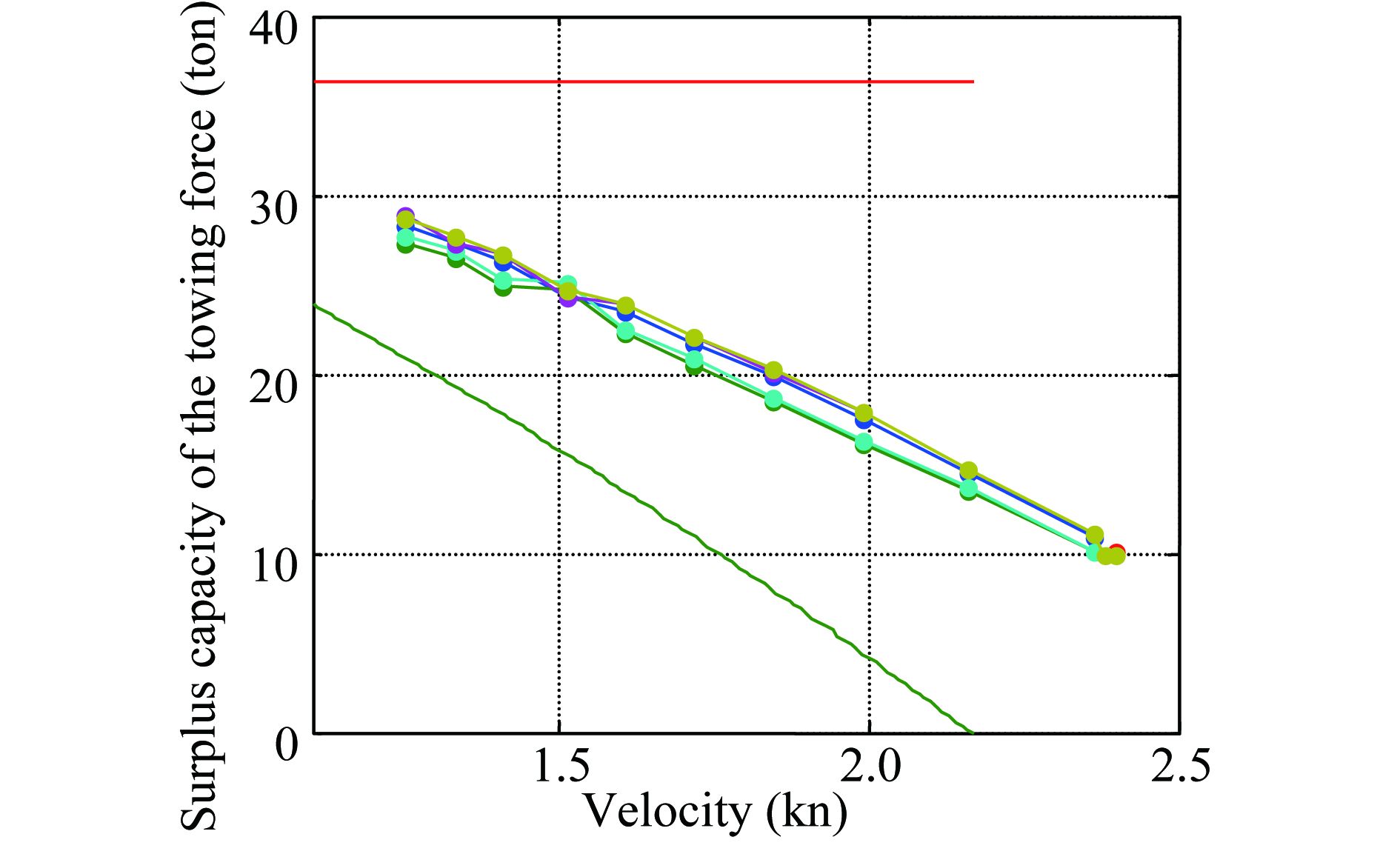
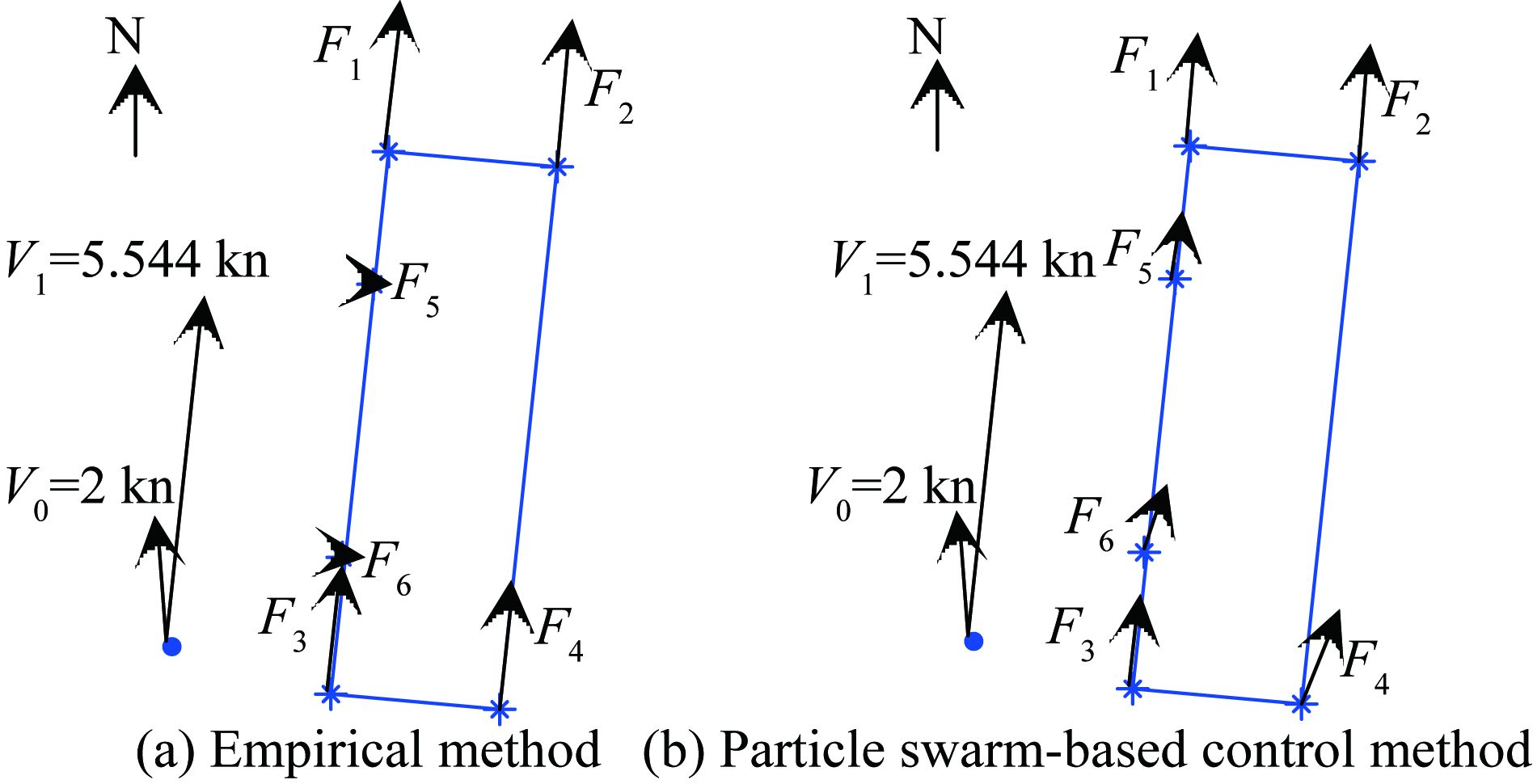
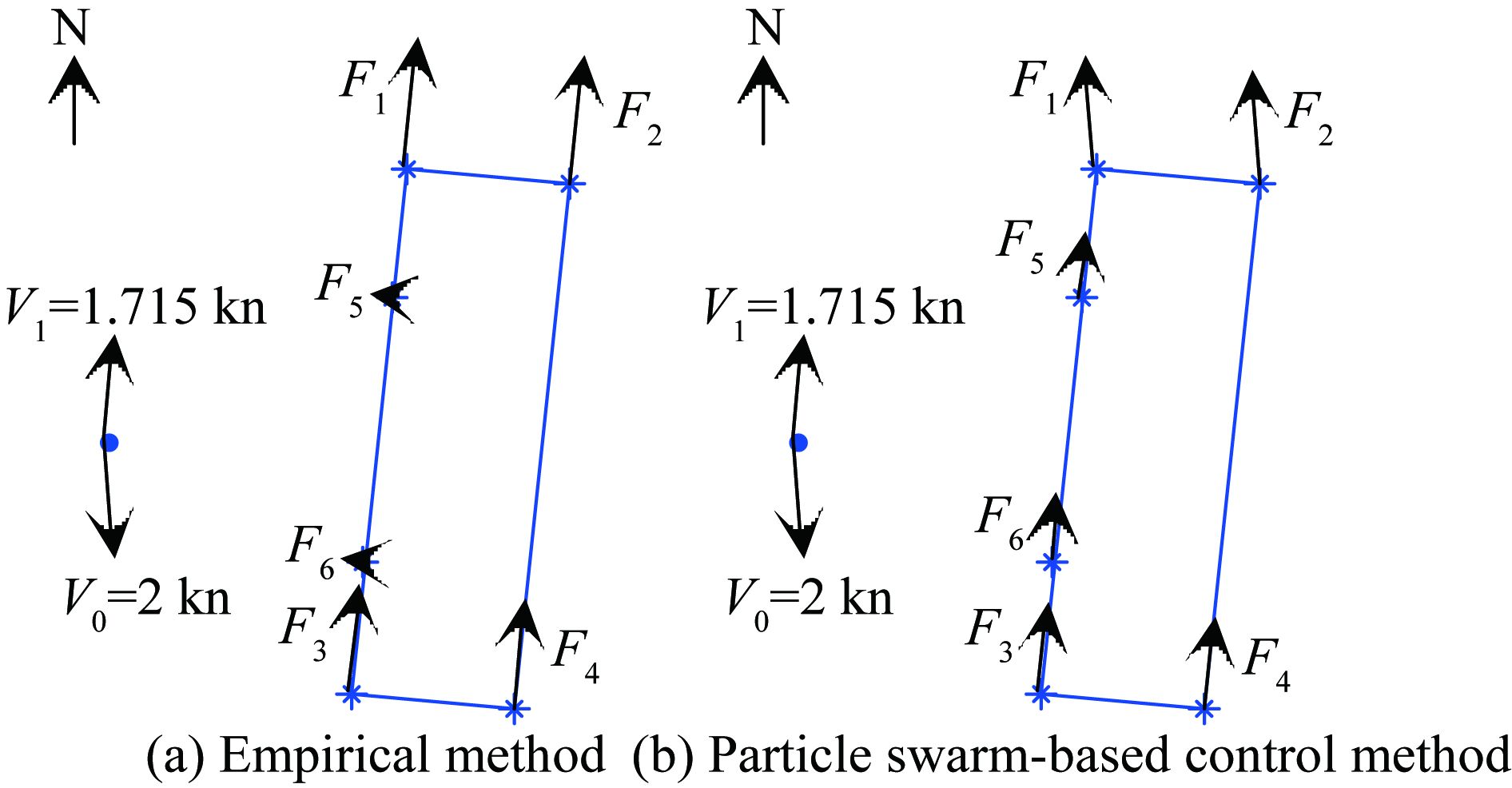
Immersed tunnel is an important part of the Hong Kong–Zhuhai–Macao Bridge (HZMB) project. In immersed tunnel floating, translation which includes straight and transverse movements is the main working mode. To decide the magnitude and direction of the towing force for each tug, a particle swarm-based translation control method is presented for non-power immersed tunnel element. A sort of linear weighted logarithmic function is exploited to avoid weak subgoals. In simulation, the particle swarm-based control method is evaluated and compared with traditional empirical method in the case of the HZMB project. Simulation results show that the presented method delivers performance improvement in terms of the enhanced surplus towing force.
Immersed tunnel is an important part of the Hong Kong–Zhuhai–Macao Bridge (HZMB) project. In immersed tunnel floating, translation which includes straight and transverse movements is the main working mode. To decide the magnitude and direction of the towing force for each tug, a particle swarm-based translation control method is presented for non-power immersed tunnel element. A sort of linear weighted logarithmic function is exploited to avoid weak subgoals. In simulation, the particle swarm-based control method is evaluated and compared with traditional empirical method in the case of the HZMB project. Simulation results show that the presented method delivers performance improvement in terms of the enhanced surplus towing force.
2018, 32(1): 41-50.
doi: 10.1007/s13344-018-0005-1
Abstract:
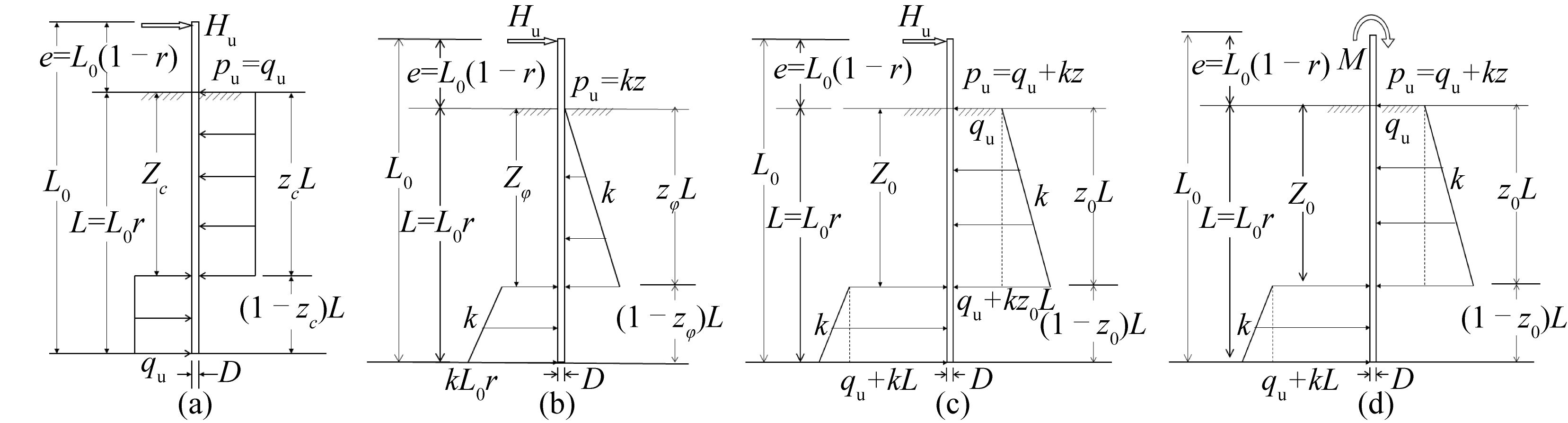
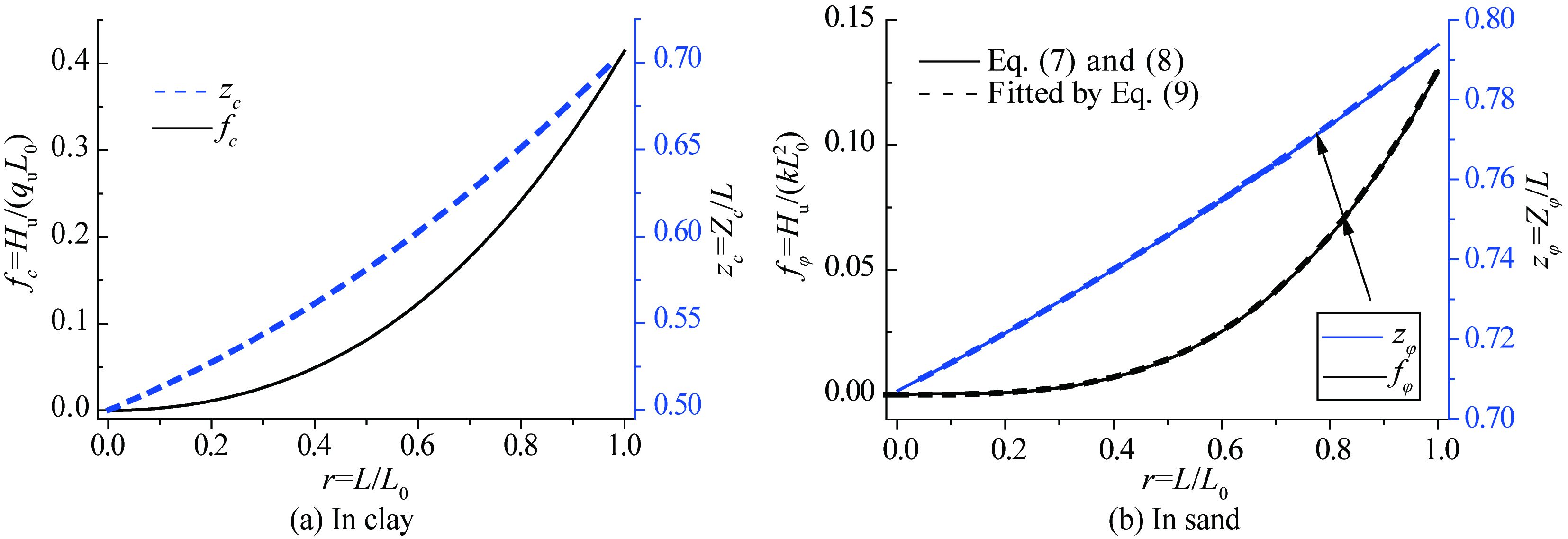
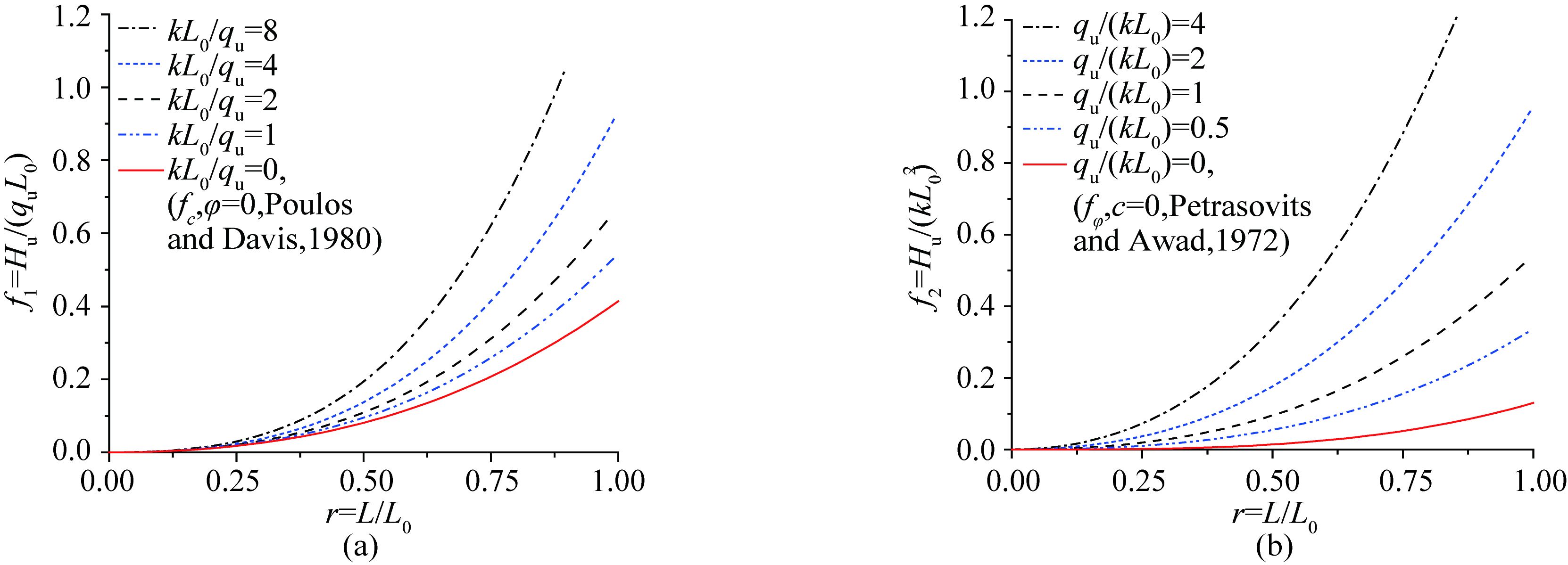
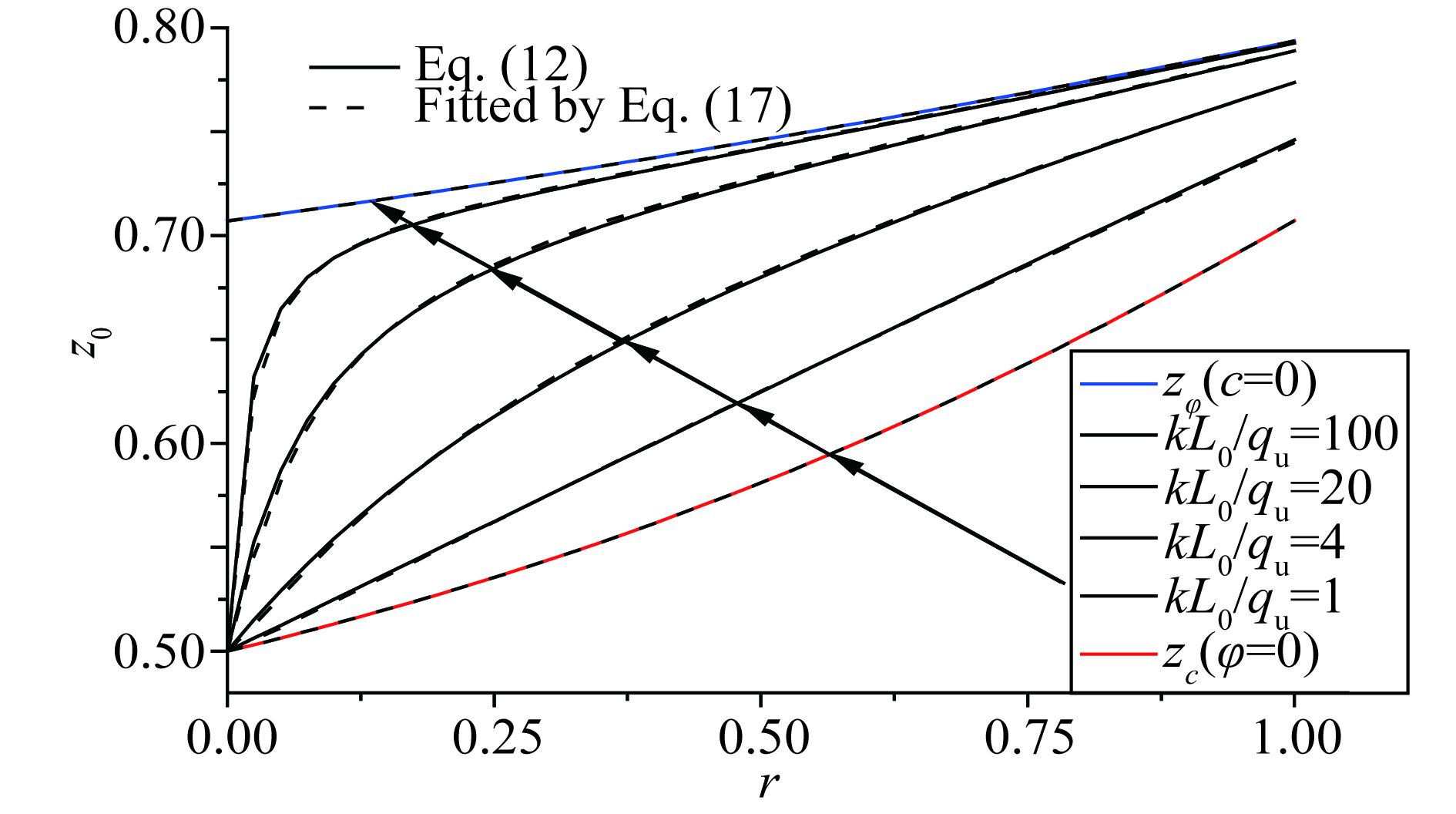
To date no analytical solution of the pile ultimate lateral capacity for the general c–φ soil has been obtained. In the present study, a new dimensionless embedded ratio was proposed and the analytical solutions of ultimate lateral capacity and rotation center of rigid pile in c–φ soils were obtained. The results showed that both the dimensionless ultimate lateral capacity and dimensionless rotation center were the univariate functions of the embedded ratio. Also, the ultimate lateral capacity in the c–φ soil was the combination of the ultimate lateral capacity (fc) in the clay, and the ultimate lateral capacity (fφ) in the sand. Therefore, the Broms chart for clay, solution for clay (φ=0) put forward by Poulos and Davis, solution for sand (c=0) obtained by Petrasovits and Awad, and Kondner’s ultimate bending moment were all proven to be the special cases of the general solution in the present study. A comparison of the field and laboratory tests in 93 cases showed that the average ratios of the theoretical values to the experimental value ranged from 0.85 to 1.15. Also, the theoretical values displayed a good agreement with the test values.
To date no analytical solution of the pile ultimate lateral capacity for the general c–φ soil has been obtained. In the present study, a new dimensionless embedded ratio was proposed and the analytical solutions of ultimate lateral capacity and rotation center of rigid pile in c–φ soils were obtained. The results showed that both the dimensionless ultimate lateral capacity and dimensionless rotation center were the univariate functions of the embedded ratio. Also, the ultimate lateral capacity in the c–φ soil was the combination of the ultimate lateral capacity (fc) in the clay, and the ultimate lateral capacity (fφ) in the sand. Therefore, the Broms chart for clay, solution for clay (φ=0) put forward by Poulos and Davis, solution for sand (c=0) obtained by Petrasovits and Awad, and Kondner’s ultimate bending moment were all proven to be the special cases of the general solution in the present study. A comparison of the field and laboratory tests in 93 cases showed that the average ratios of the theoretical values to the experimental value ranged from 0.85 to 1.15. Also, the theoretical values displayed a good agreement with the test values.
2018, 32(1): 51-61.
doi: 10.1007/s13344-018-0006-0
Abstract:
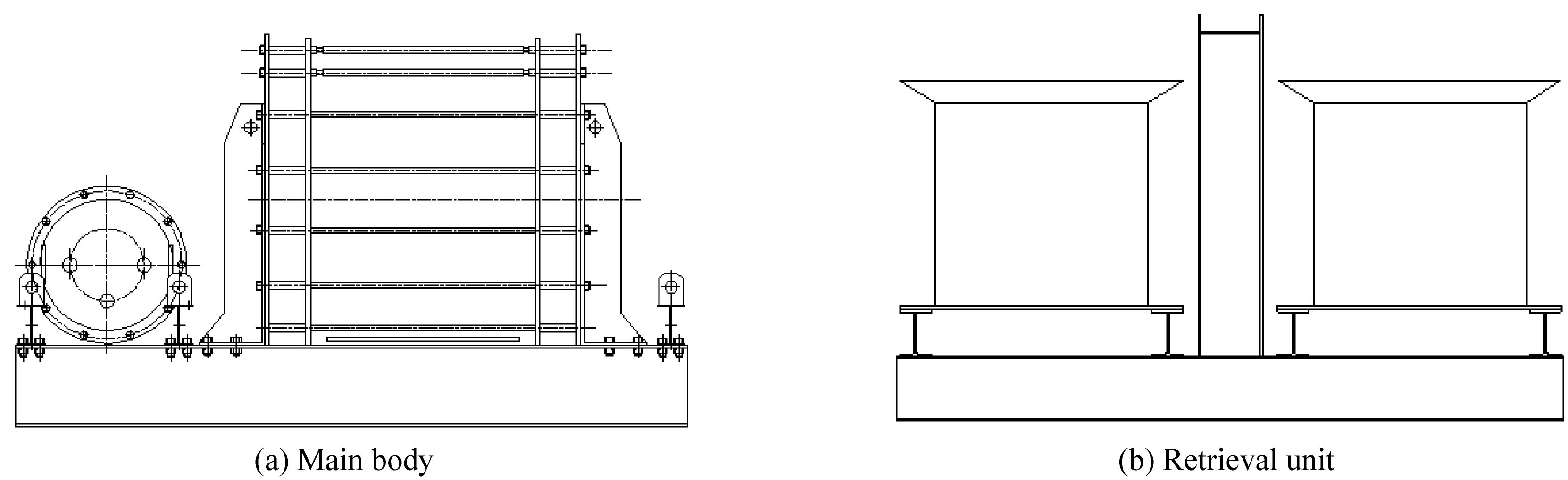
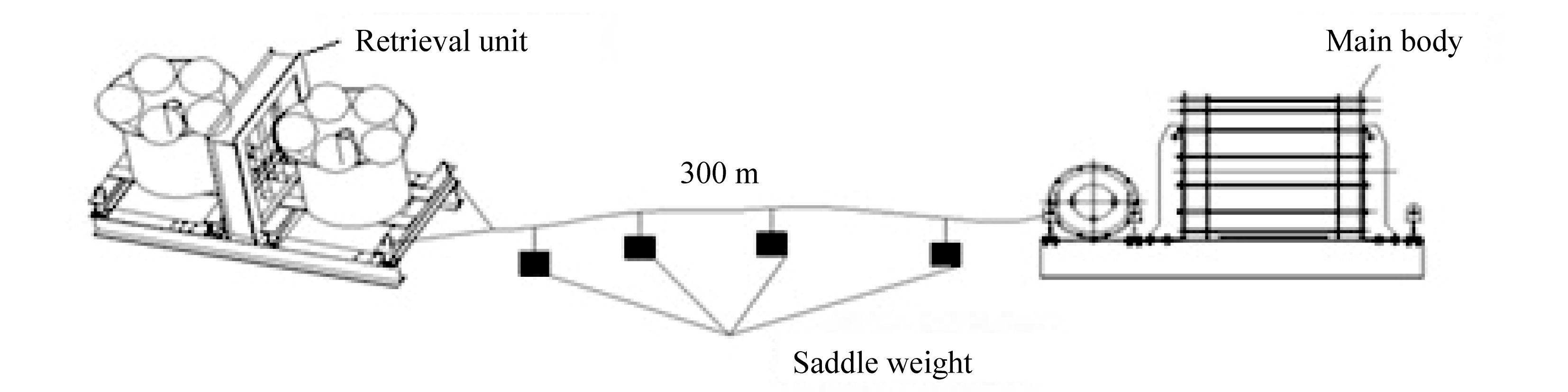
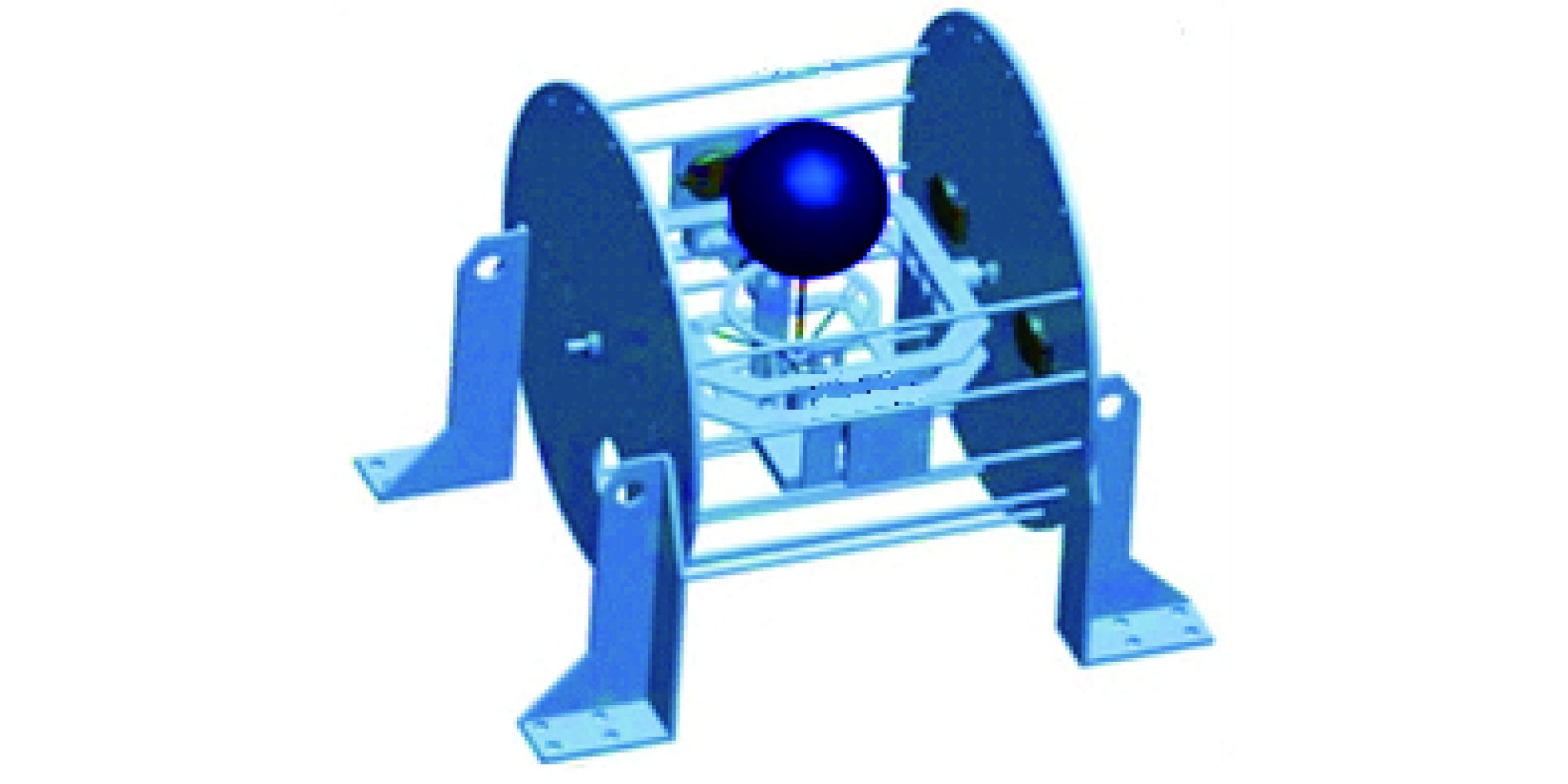
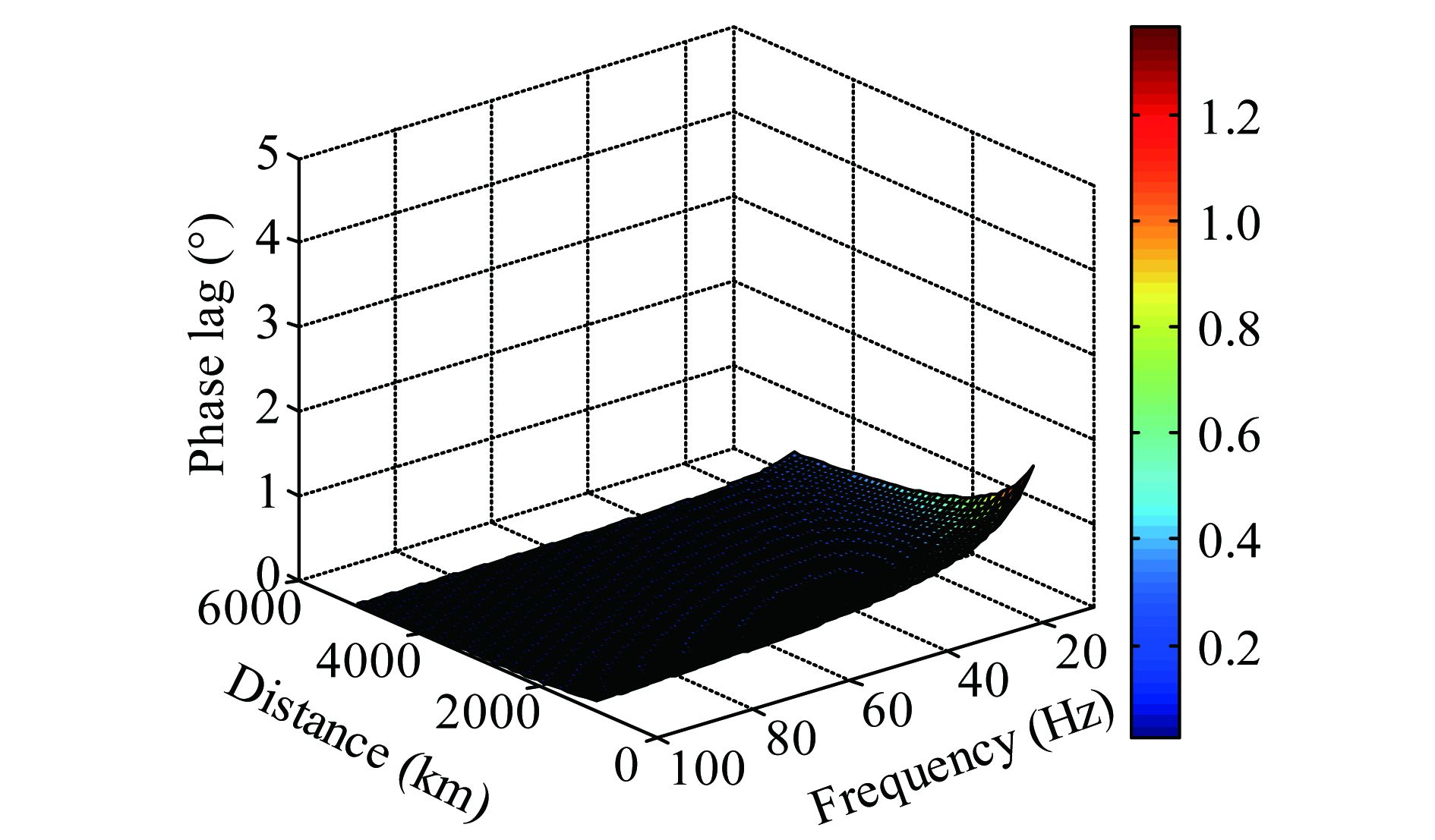
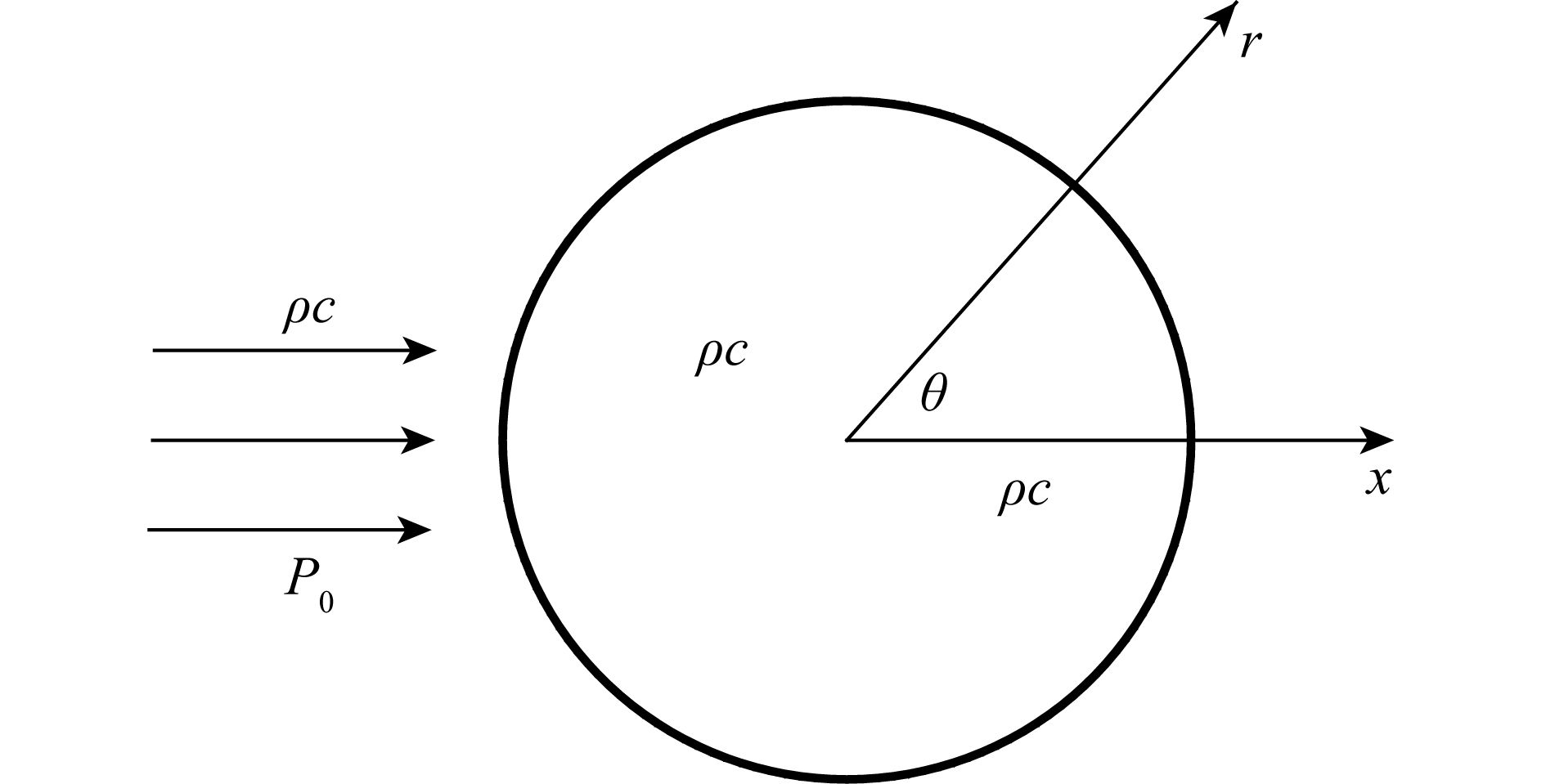
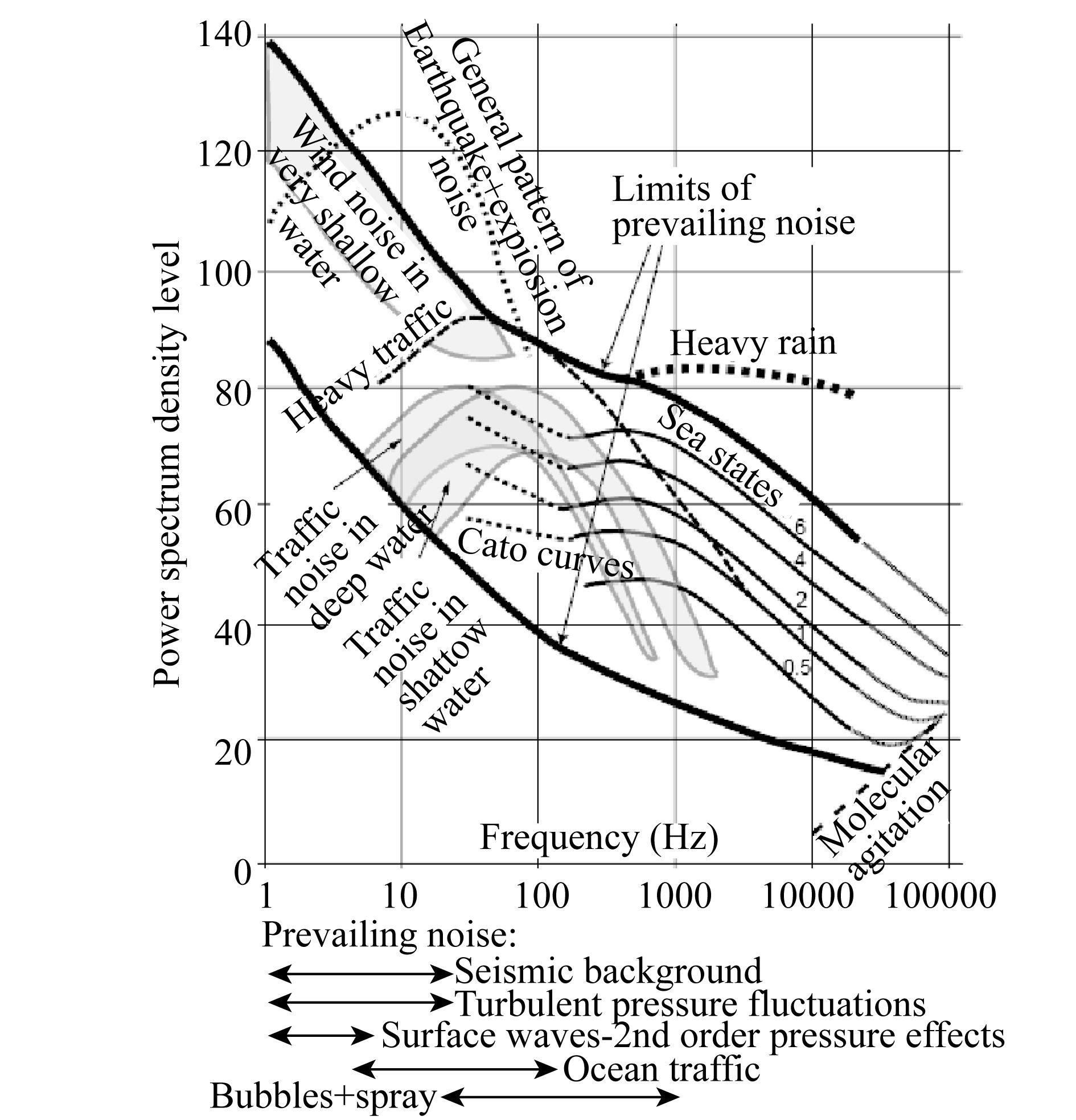
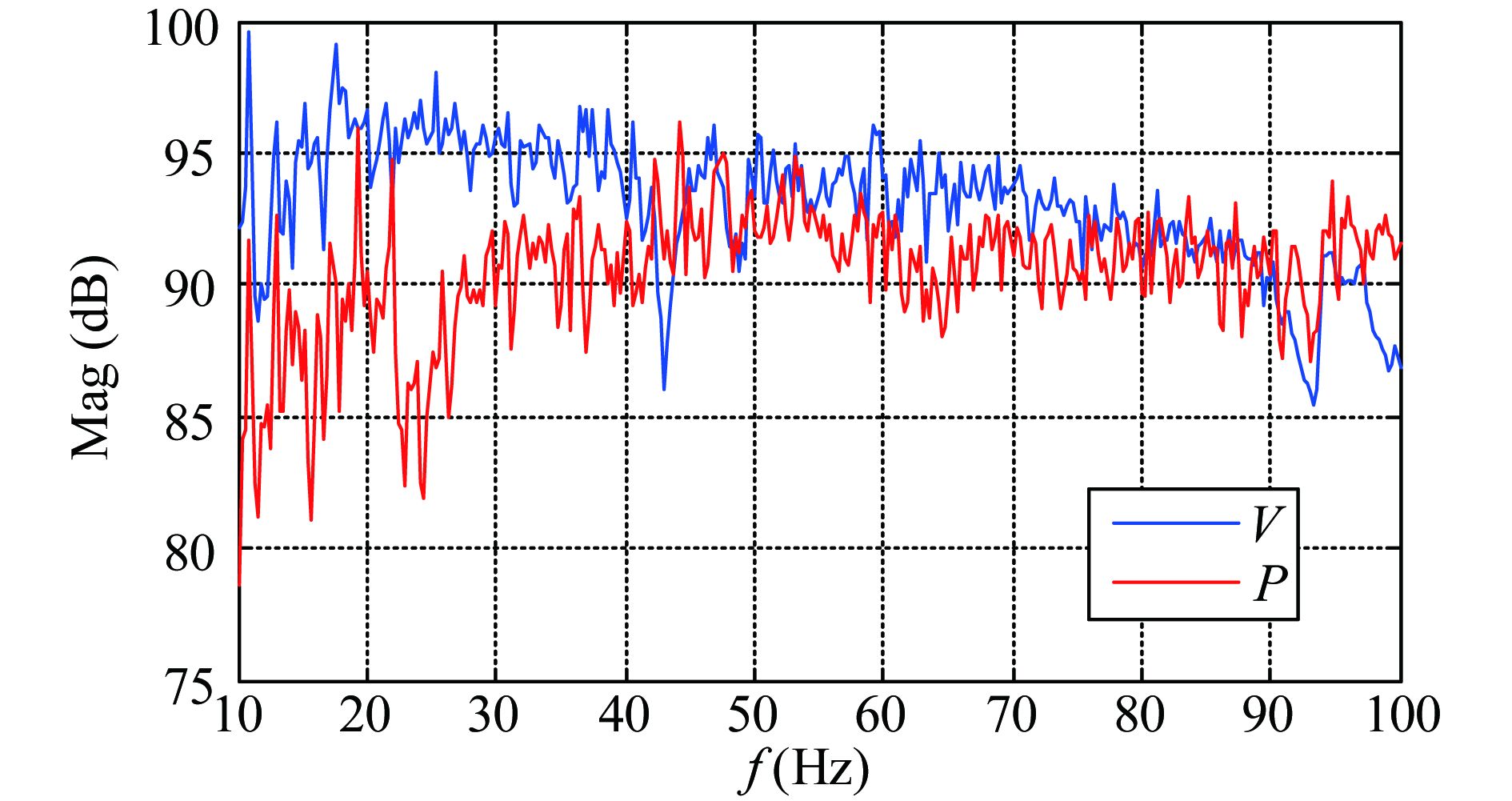
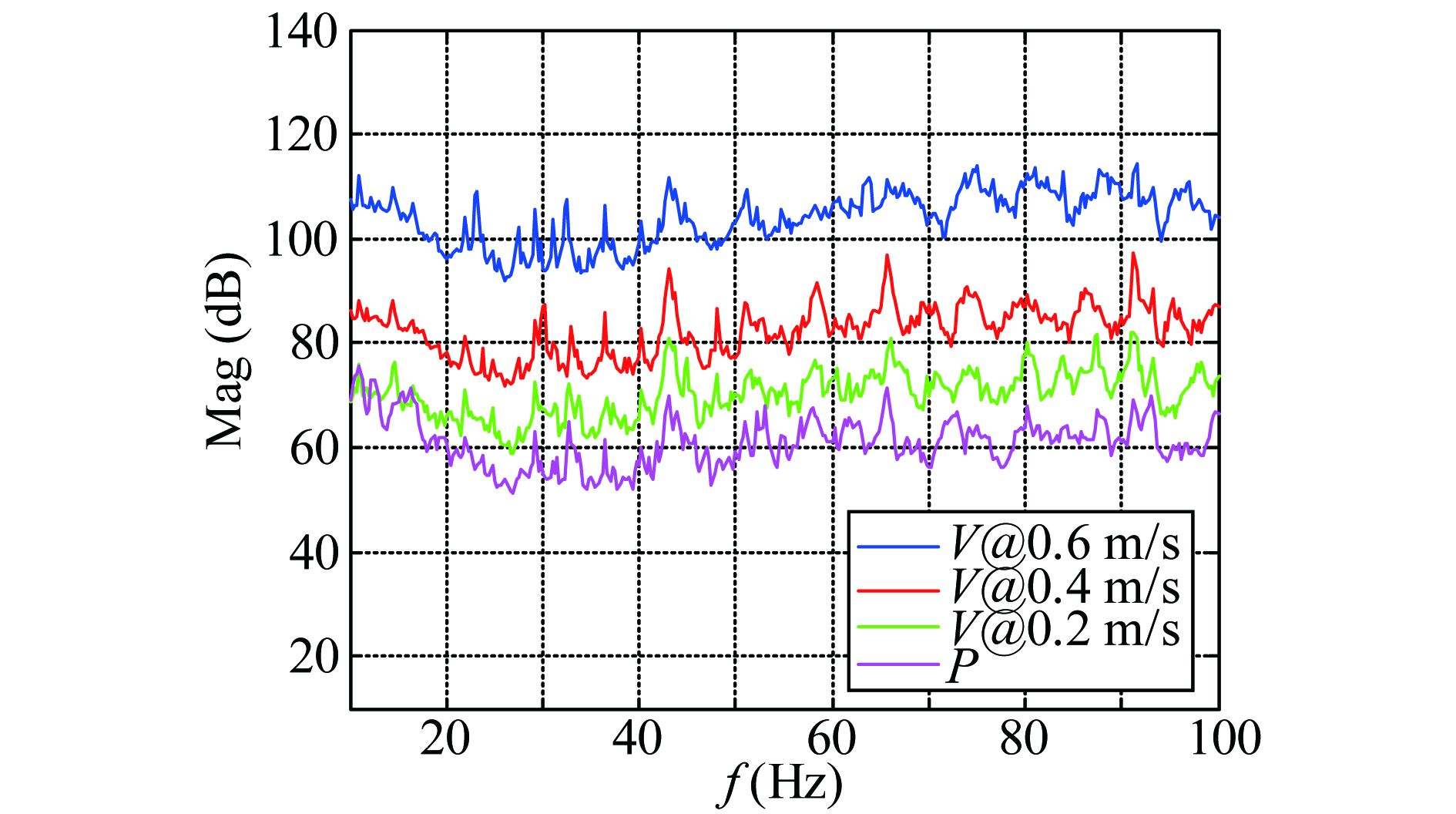
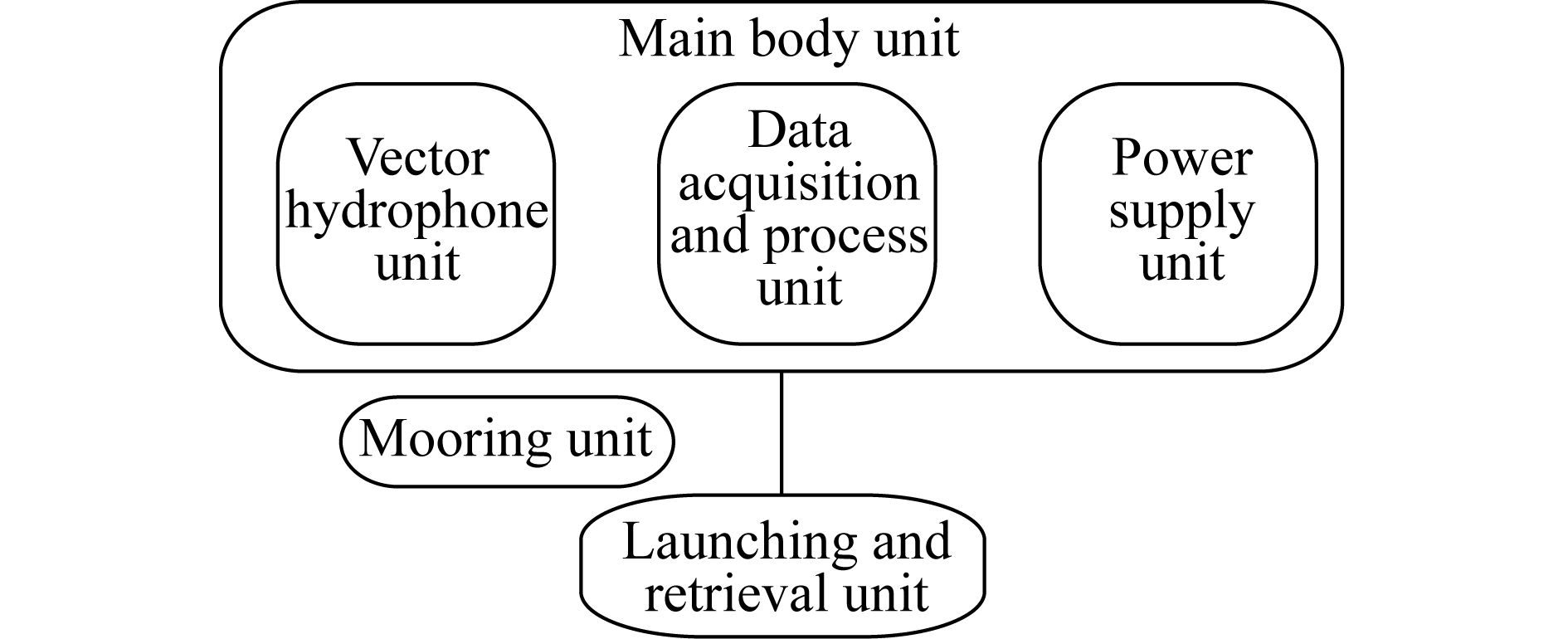
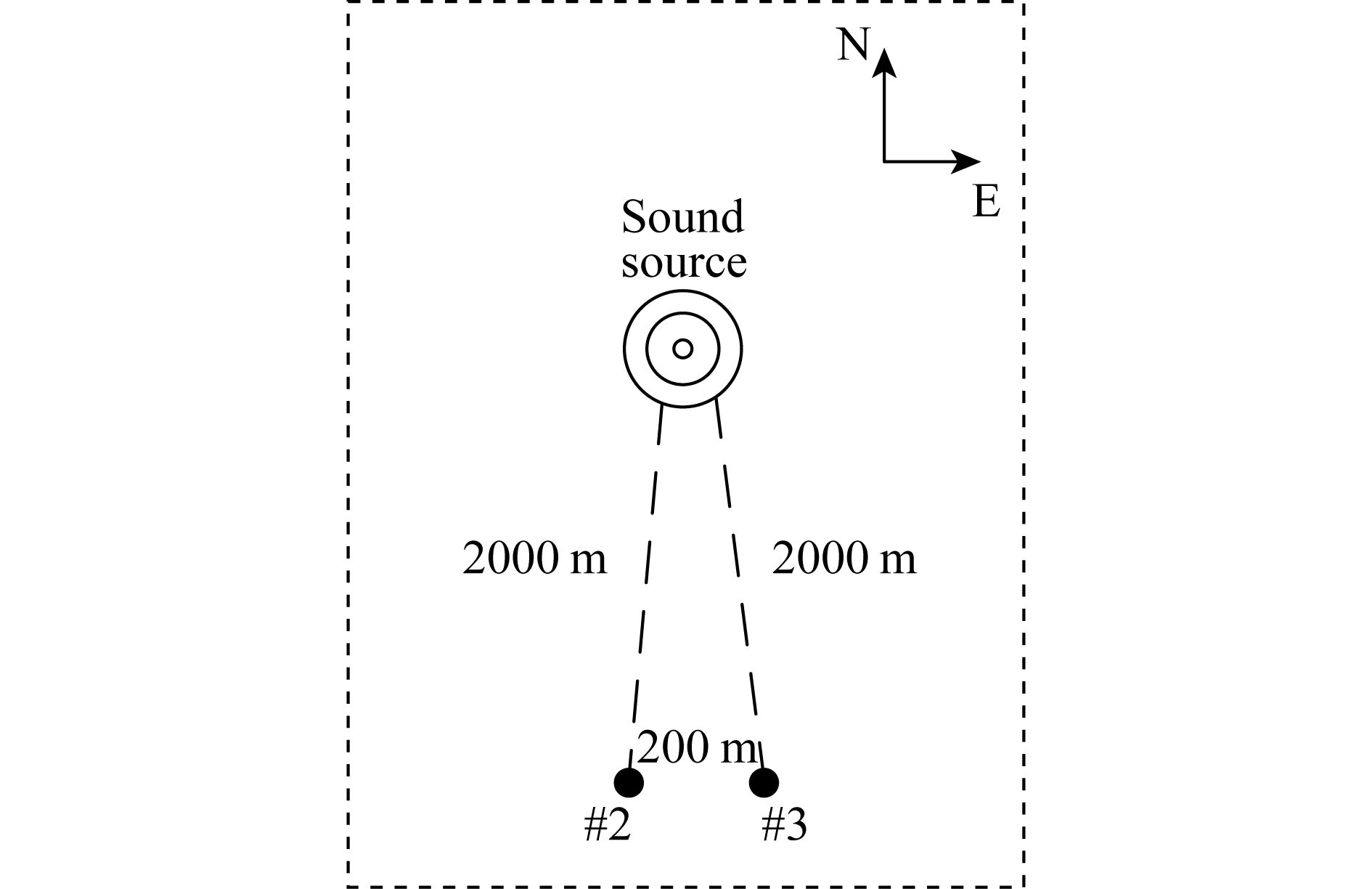
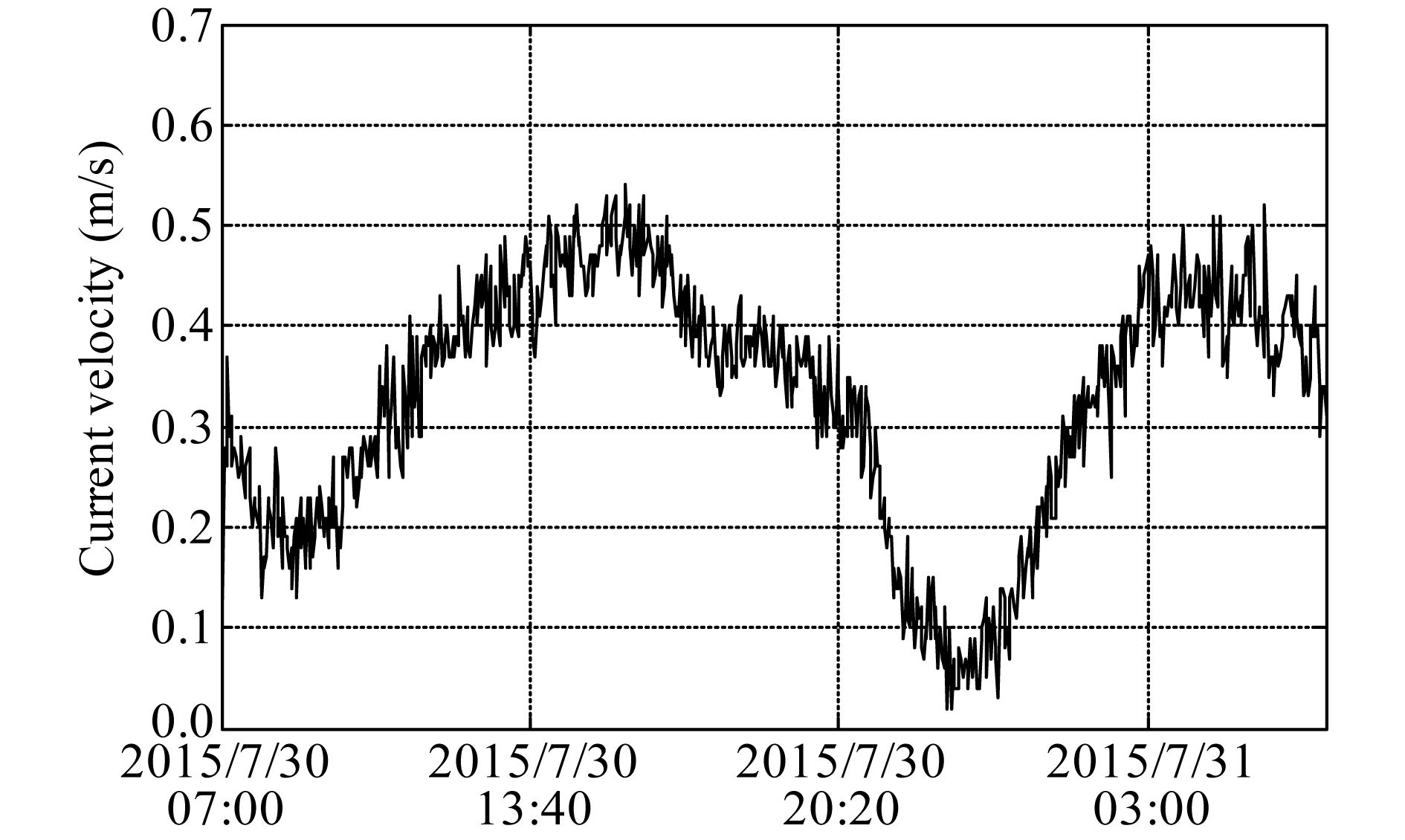
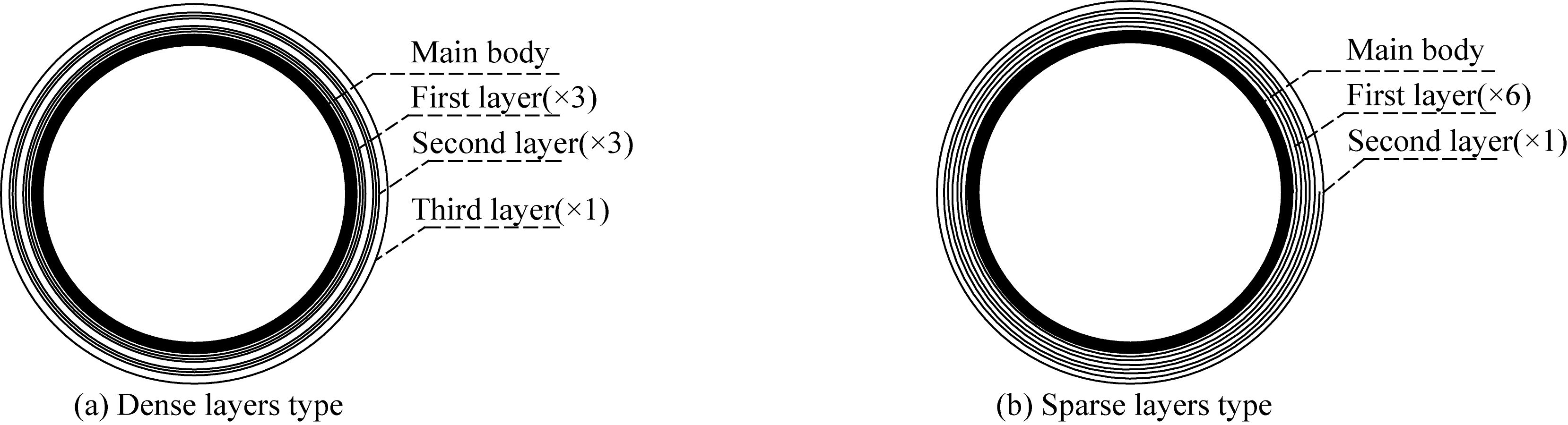
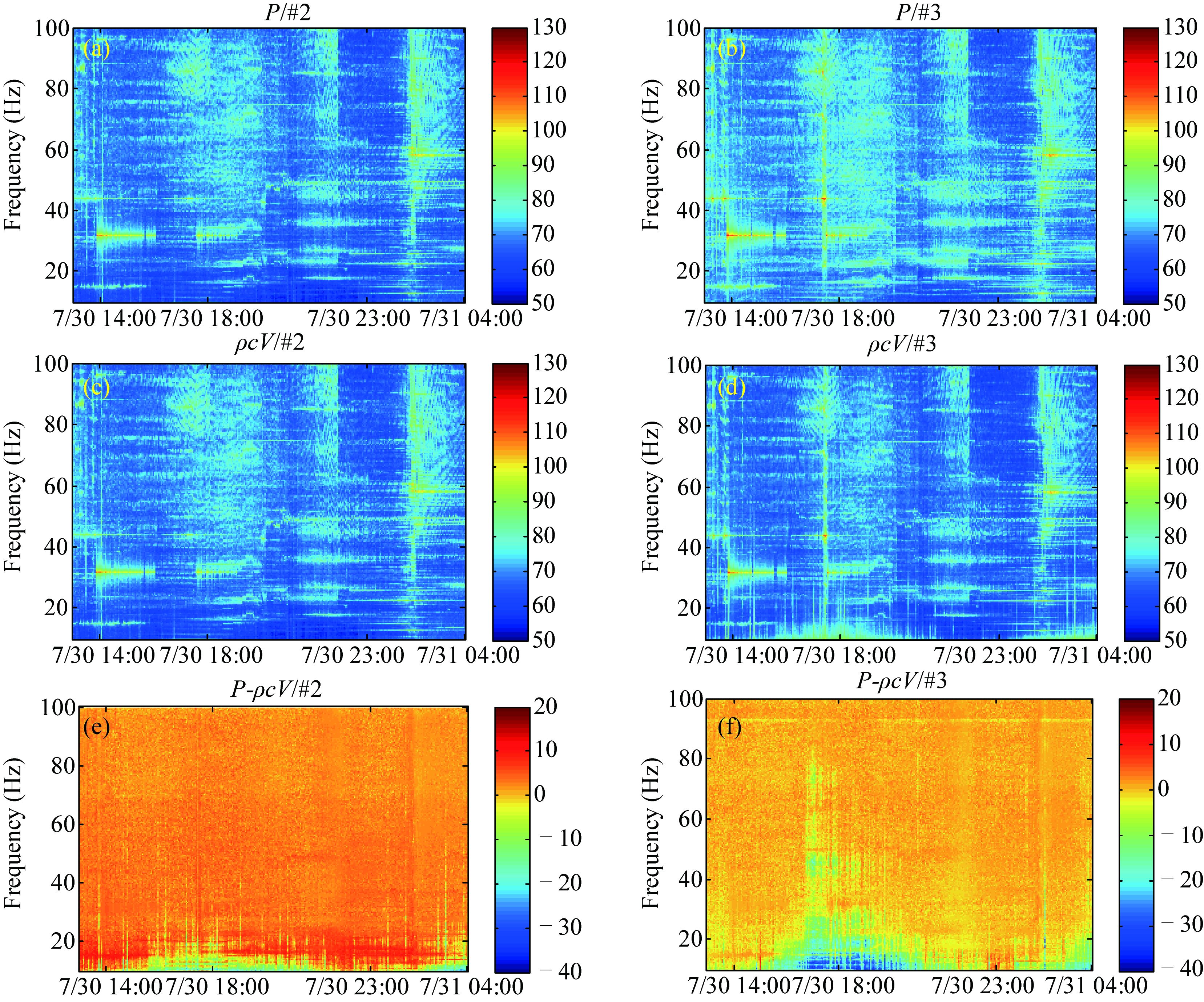
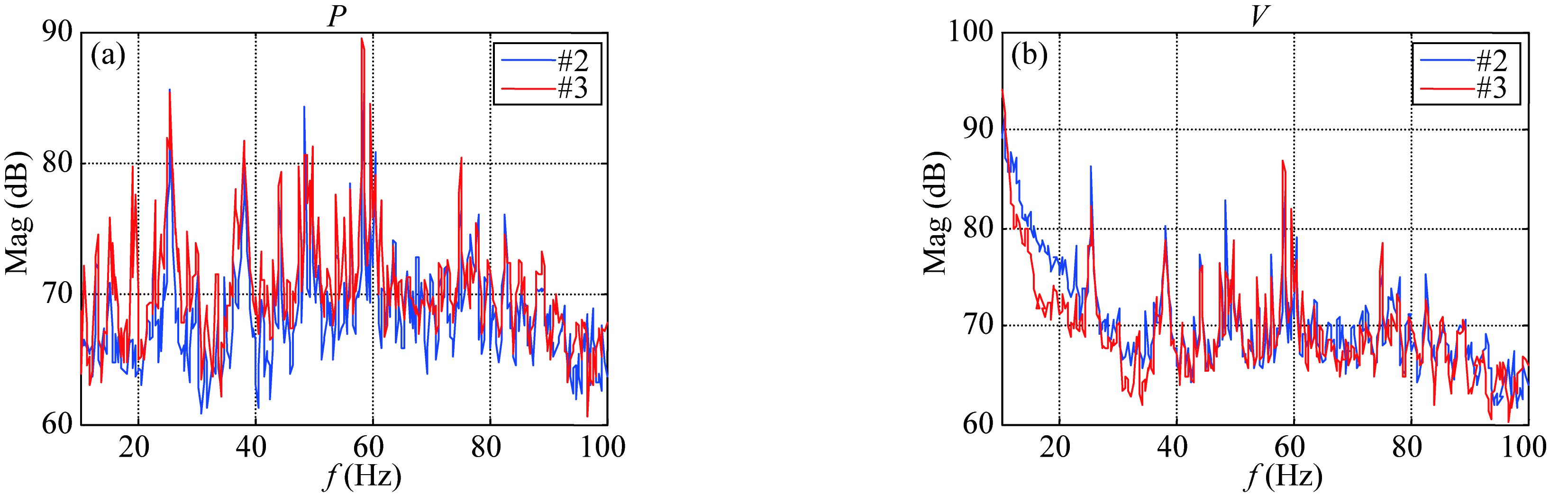
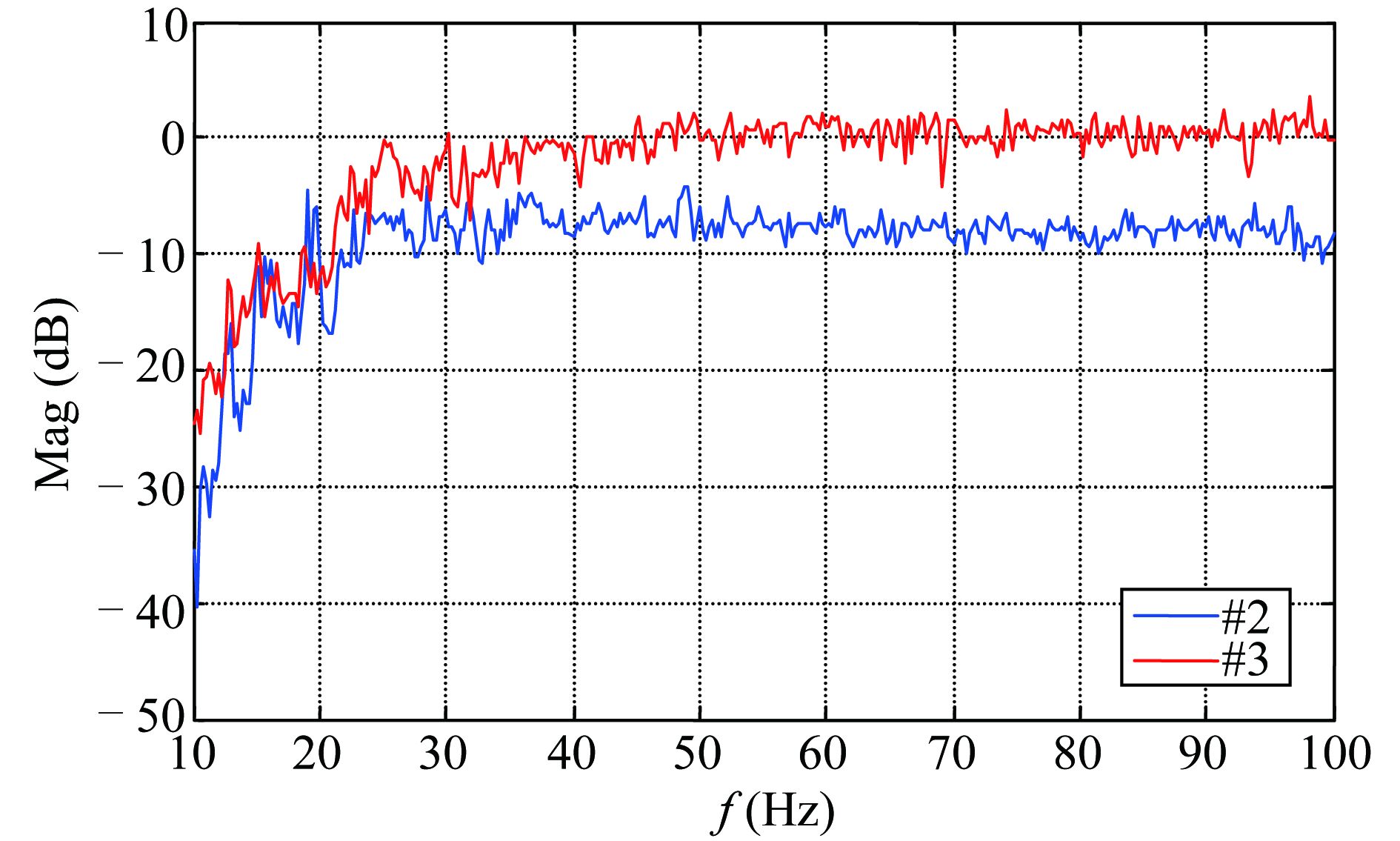
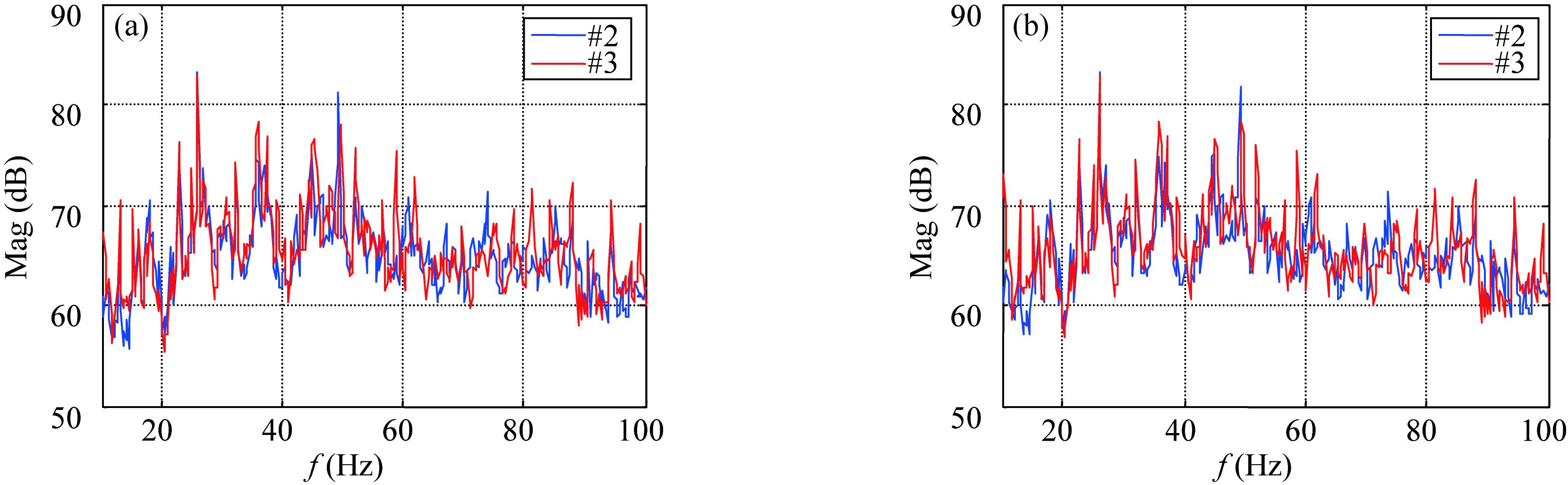
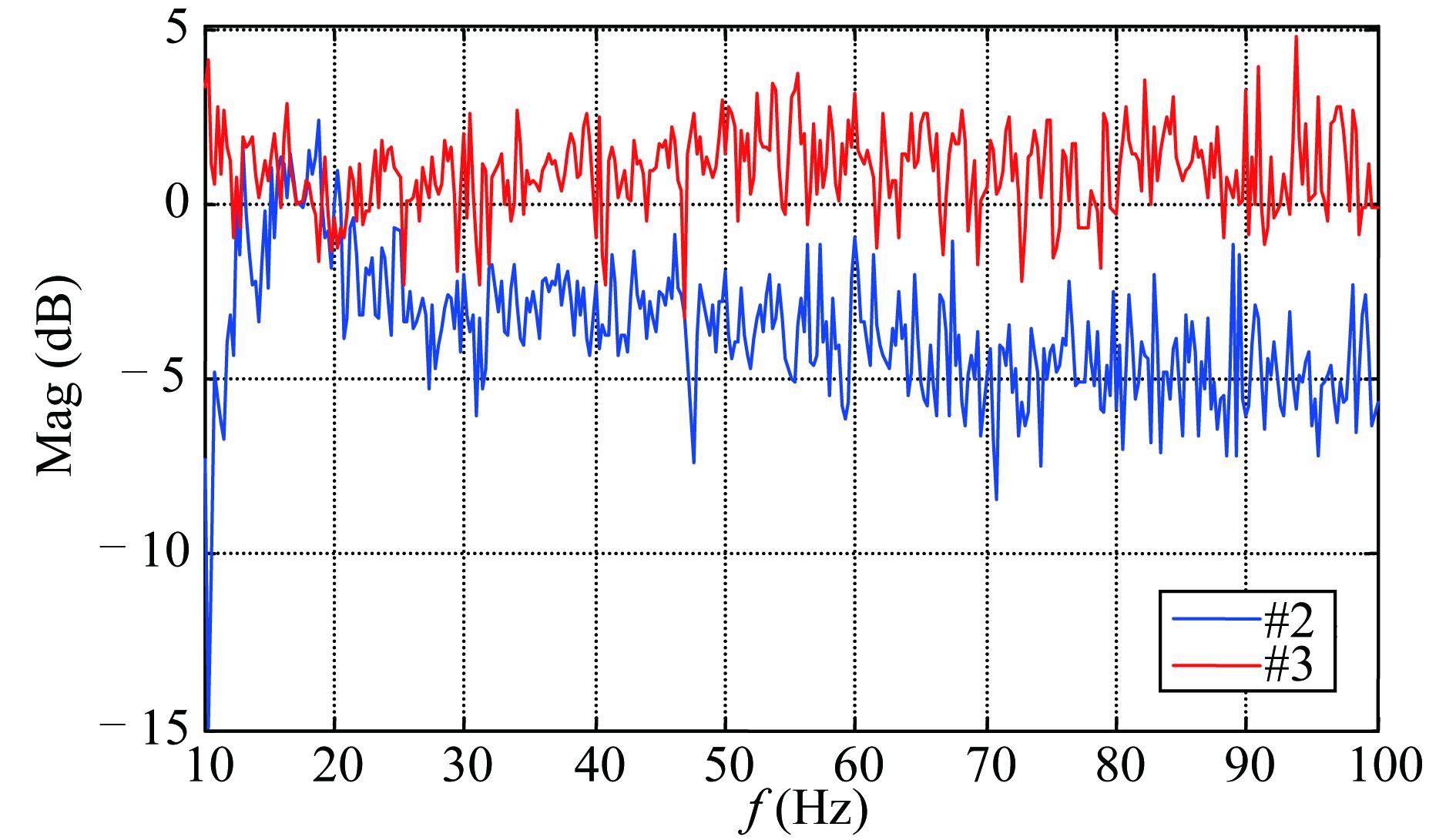
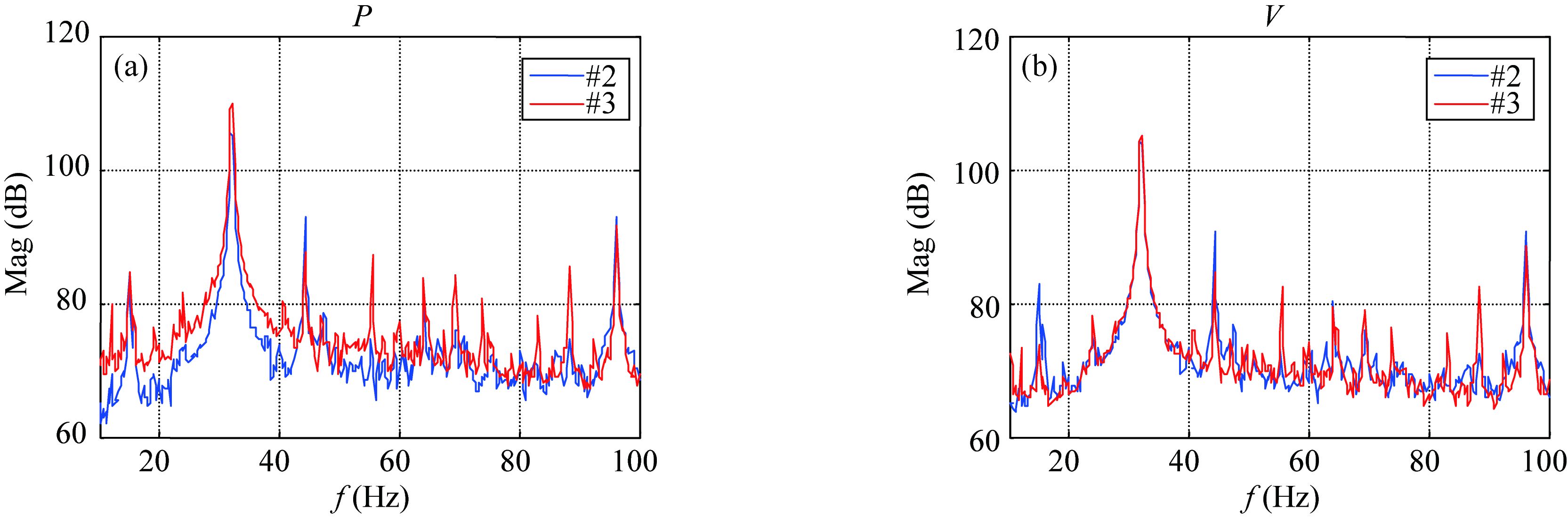
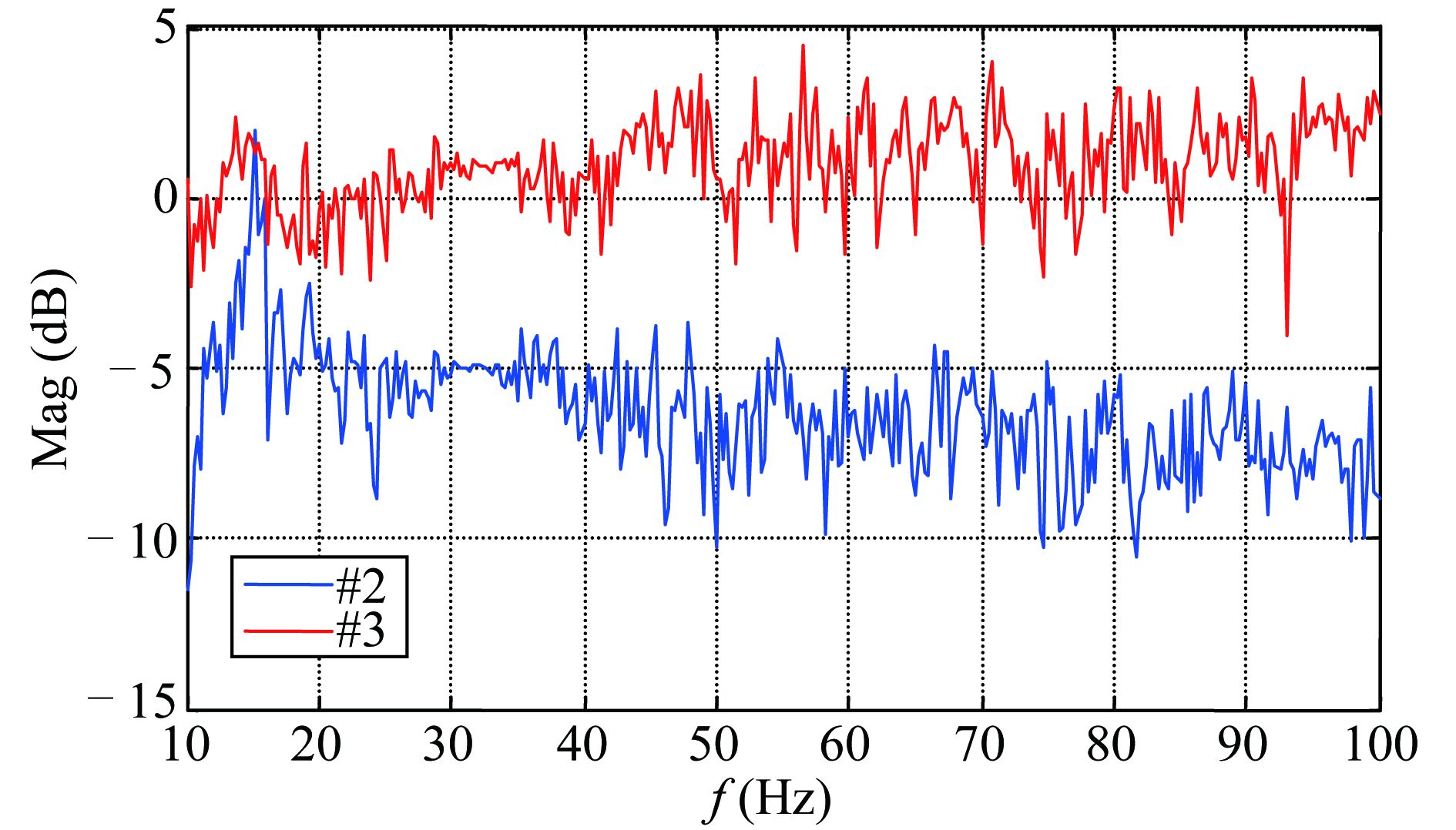
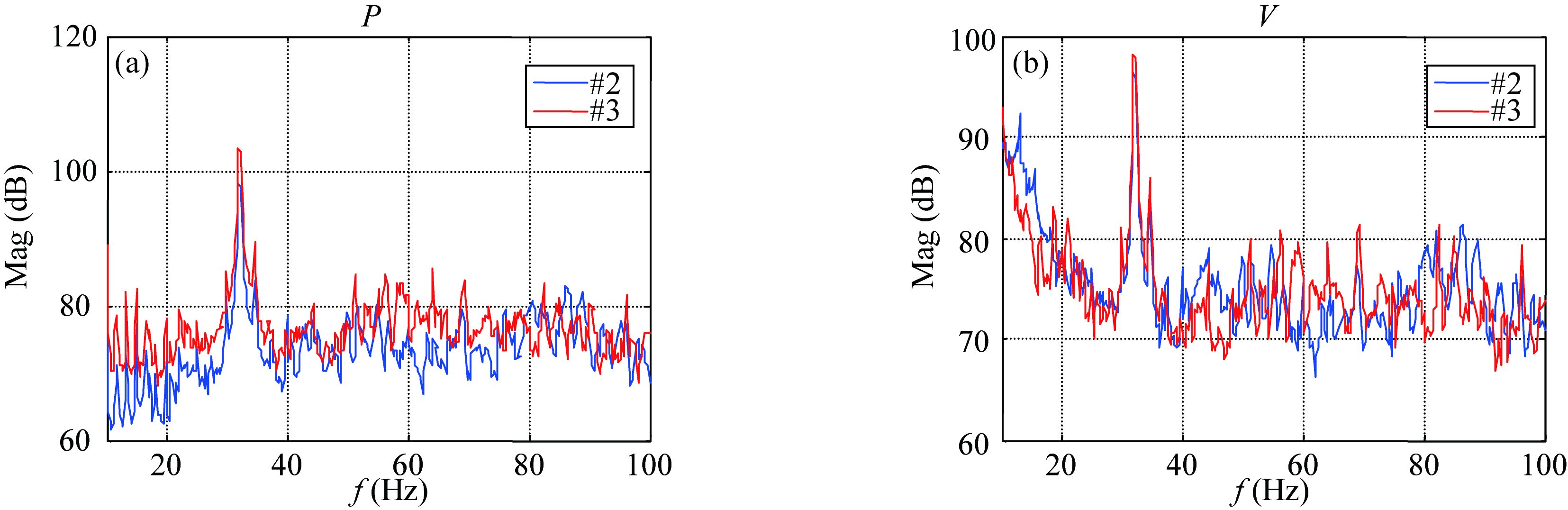
In the disturbance of unsteady flow field under the sea, the monitoring accuracy and precision of the bottom-mounted acoustic monitoring platform will decrease. In order to reduce the hydrodynamic interference, the platform wrapped with fairing structure and separated from the retrieval unit is described. The suppression effect evaluation based on the correlation theory of sound pressure and particle velocity for spherical wave in infinite homogeneous medium is proposed and the difference value between them is used to evaluate the hydrodynamic restraining performance of the bottom-mounted platform under far field condition. Through the sea test, it is indicated that the platform with sparse layers fairing structure (there are two layers for the fairing, in which the inside layer is 6-layers sparse metal net, and the outside layer is 1-layer polyester cloth, and then it takes sparse layers for short) has no attenuation in the sound pressure response to the sound source signal, but obvious suppression in the velocity response to the hydrodynamic noise. The effective frequency of the fairing structure is decreased below 10 Hz, and the noise magnitude is reduced by 10 dB. With the comparison of different fairing structures, it is concluded that the tighter fairing structure can enhance the performance of sound transmission and flow restraining.
In the disturbance of unsteady flow field under the sea, the monitoring accuracy and precision of the bottom-mounted acoustic monitoring platform will decrease. In order to reduce the hydrodynamic interference, the platform wrapped with fairing structure and separated from the retrieval unit is described. The suppression effect evaluation based on the correlation theory of sound pressure and particle velocity for spherical wave in infinite homogeneous medium is proposed and the difference value between them is used to evaluate the hydrodynamic restraining performance of the bottom-mounted platform under far field condition. Through the sea test, it is indicated that the platform with sparse layers fairing structure (there are two layers for the fairing, in which the inside layer is 6-layers sparse metal net, and the outside layer is 1-layer polyester cloth, and then it takes sparse layers for short) has no attenuation in the sound pressure response to the sound source signal, but obvious suppression in the velocity response to the hydrodynamic noise. The effective frequency of the fairing structure is decreased below 10 Hz, and the noise magnitude is reduced by 10 dB. With the comparison of different fairing structures, it is concluded that the tighter fairing structure can enhance the performance of sound transmission and flow restraining.

2018, 32(1): 62-73.
doi: 10.1007/s13344-018-0007-z
Abstract:
Errors will be caused in calculating the fatigue damages of details in liquid cargo tanks by using the traditional spectral analysis method which is based on linear system, for the nonlinear relationship between the dynamic stress and the ship acceleration. An improved spectral analysis method for the assessment of the fatigue damage in detail of a liquid cargo tank is proposed in this paper. Based on assumptions that the wave process can be simulated by summing the sinusoidal waves in different frequencies and the stress process can be simulated by summing the stress processes induced by these sinusoidal waves, the stress power spectral density (PSD) is calculated by expanding the stress processes induced by the sinusoidal waves into Fourier series and adding the amplitudes of each harmonic component with the same frequency. This analysis method can take the nonlinear relationship into consideration and the fatigue damage is then calculated based on the PSD of stress. Take an independent tank in an LNG carrier for example, the accuracy of the improved spectral analysis method is proved much better than that of the traditional spectral analysis method by comparing the calculated damage results with the results calculated by the time domain method. The proposed spectral analysis method is more accurate in calculating the fatigue damages in detail of ship liquid cargo tanks.
Errors will be caused in calculating the fatigue damages of details in liquid cargo tanks by using the traditional spectral analysis method which is based on linear system, for the nonlinear relationship between the dynamic stress and the ship acceleration. An improved spectral analysis method for the assessment of the fatigue damage in detail of a liquid cargo tank is proposed in this paper. Based on assumptions that the wave process can be simulated by summing the sinusoidal waves in different frequencies and the stress process can be simulated by summing the stress processes induced by these sinusoidal waves, the stress power spectral density (PSD) is calculated by expanding the stress processes induced by the sinusoidal waves into Fourier series and adding the amplitudes of each harmonic component with the same frequency. This analysis method can take the nonlinear relationship into consideration and the fatigue damage is then calculated based on the PSD of stress. Take an independent tank in an LNG carrier for example, the accuracy of the improved spectral analysis method is proved much better than that of the traditional spectral analysis method by comparing the calculated damage results with the results calculated by the time domain method. The proposed spectral analysis method is more accurate in calculating the fatigue damages in detail of ship liquid cargo tanks.
2018, 32(1): 74-84.
doi: 10.1007/s13344-018-0008-y
Abstract:
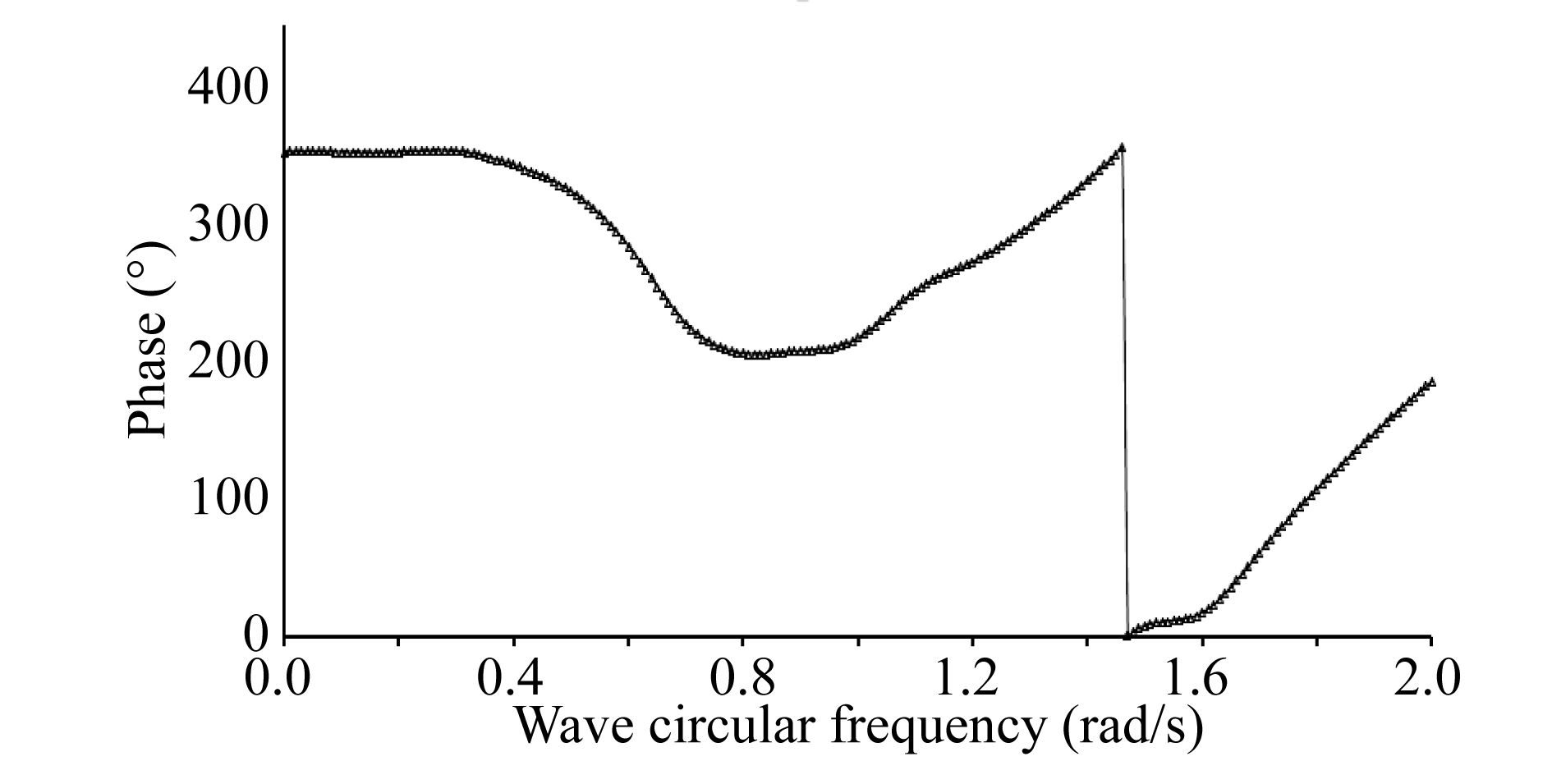
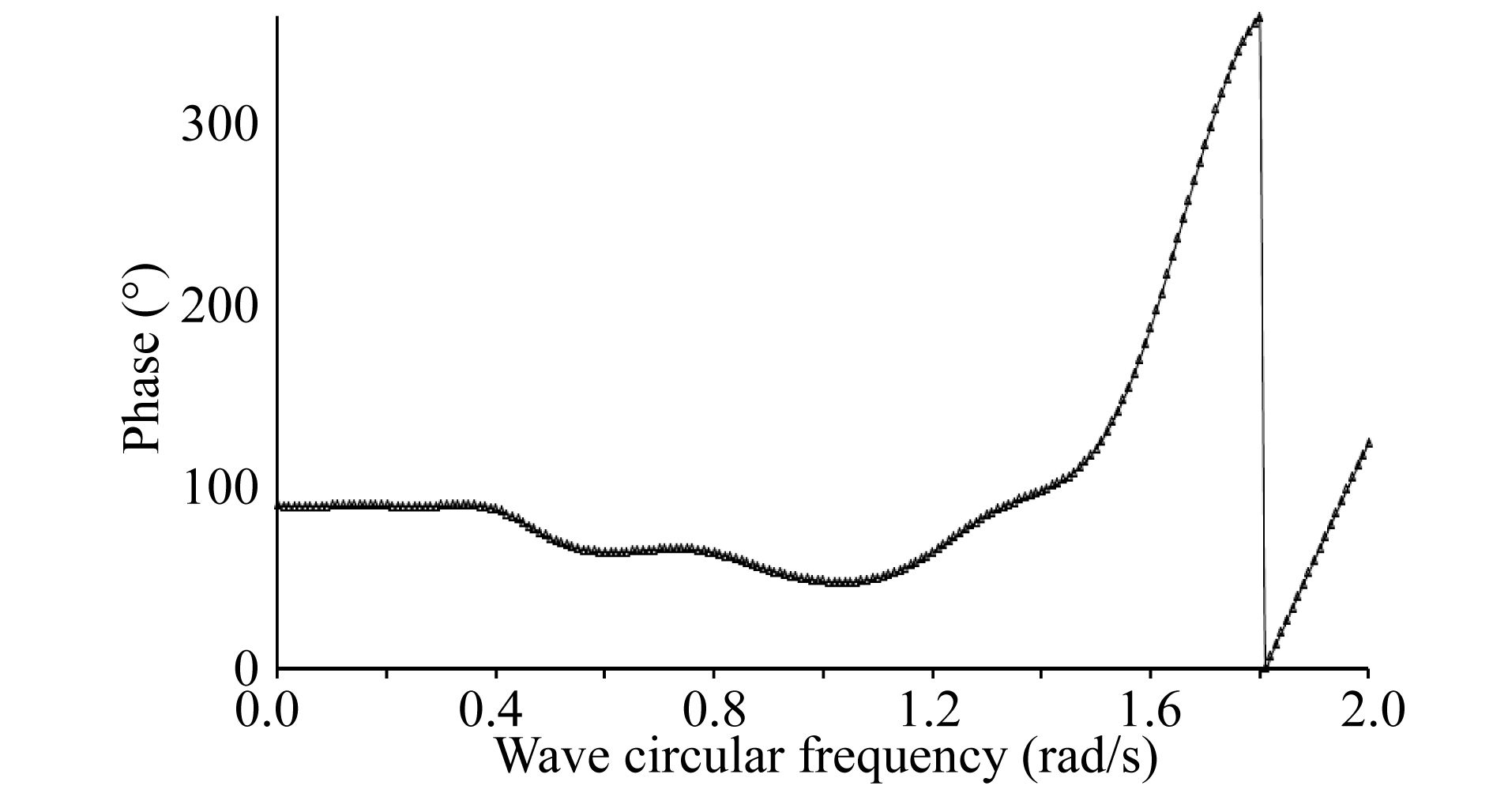
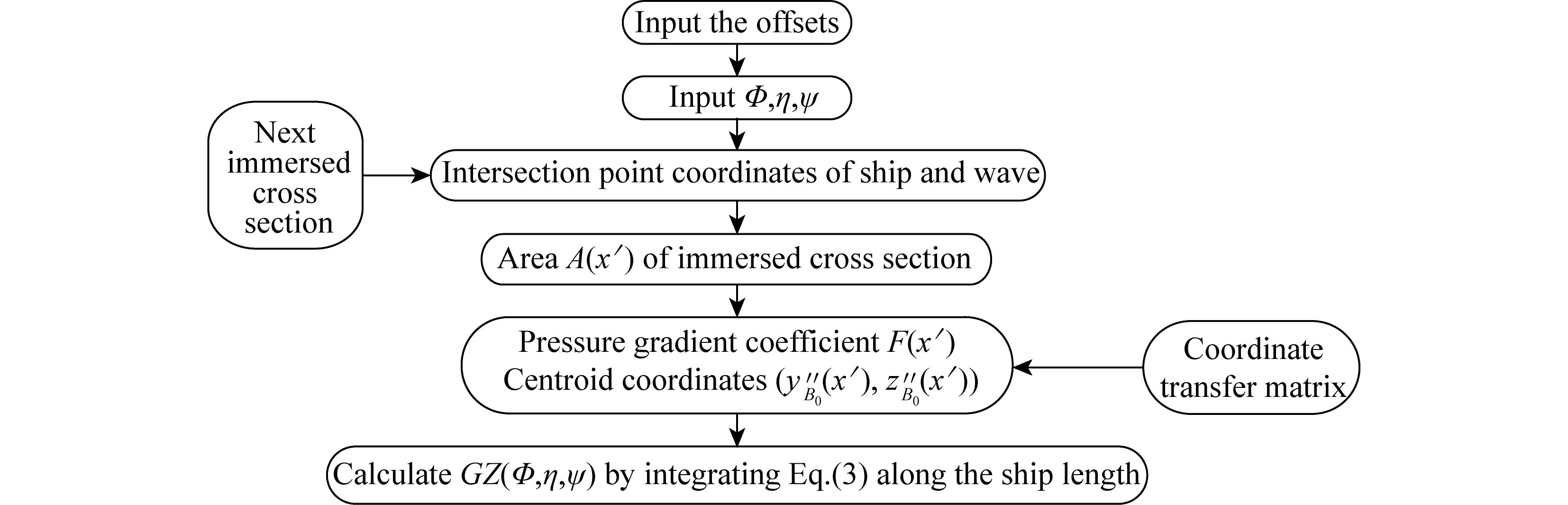
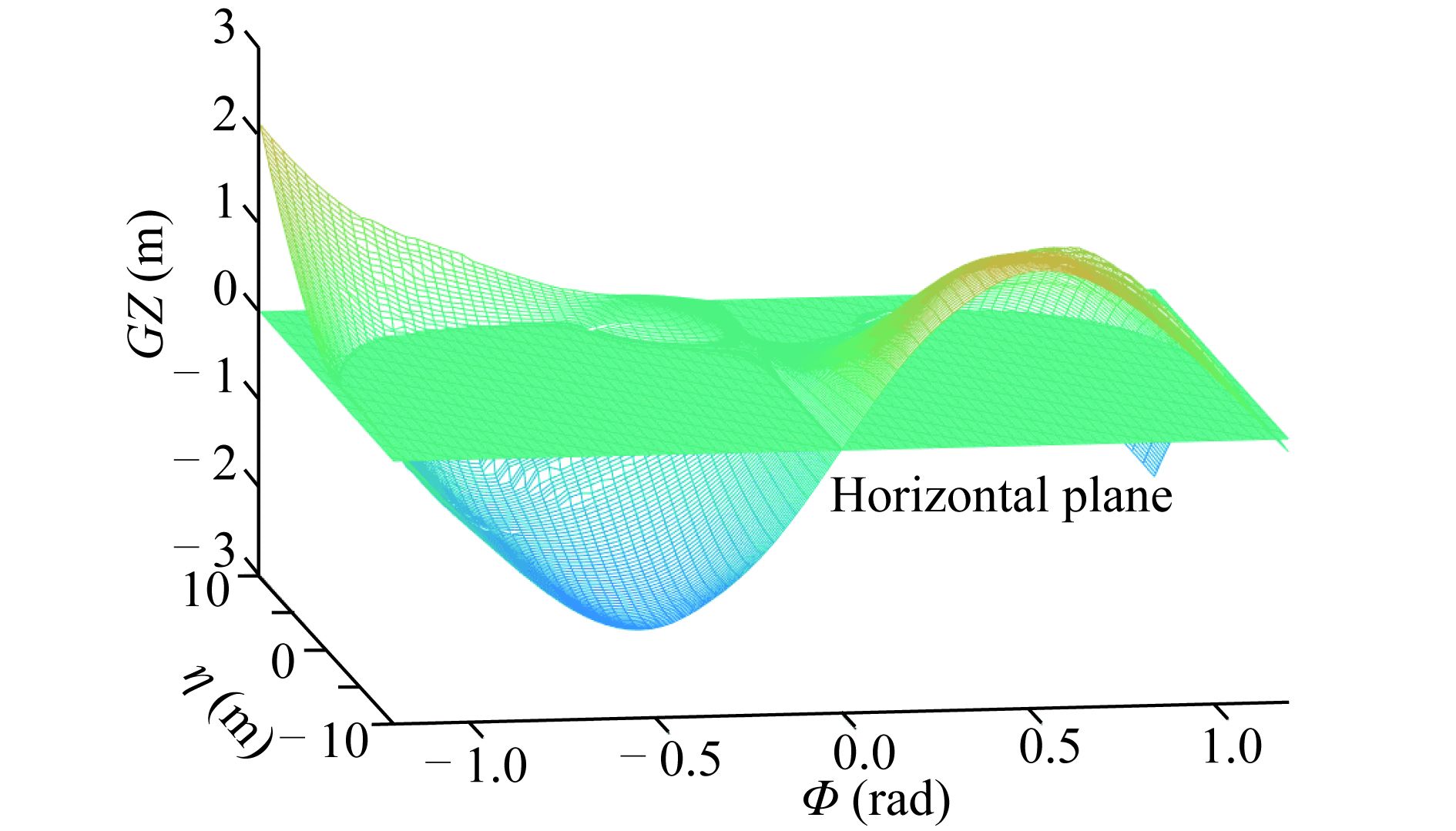
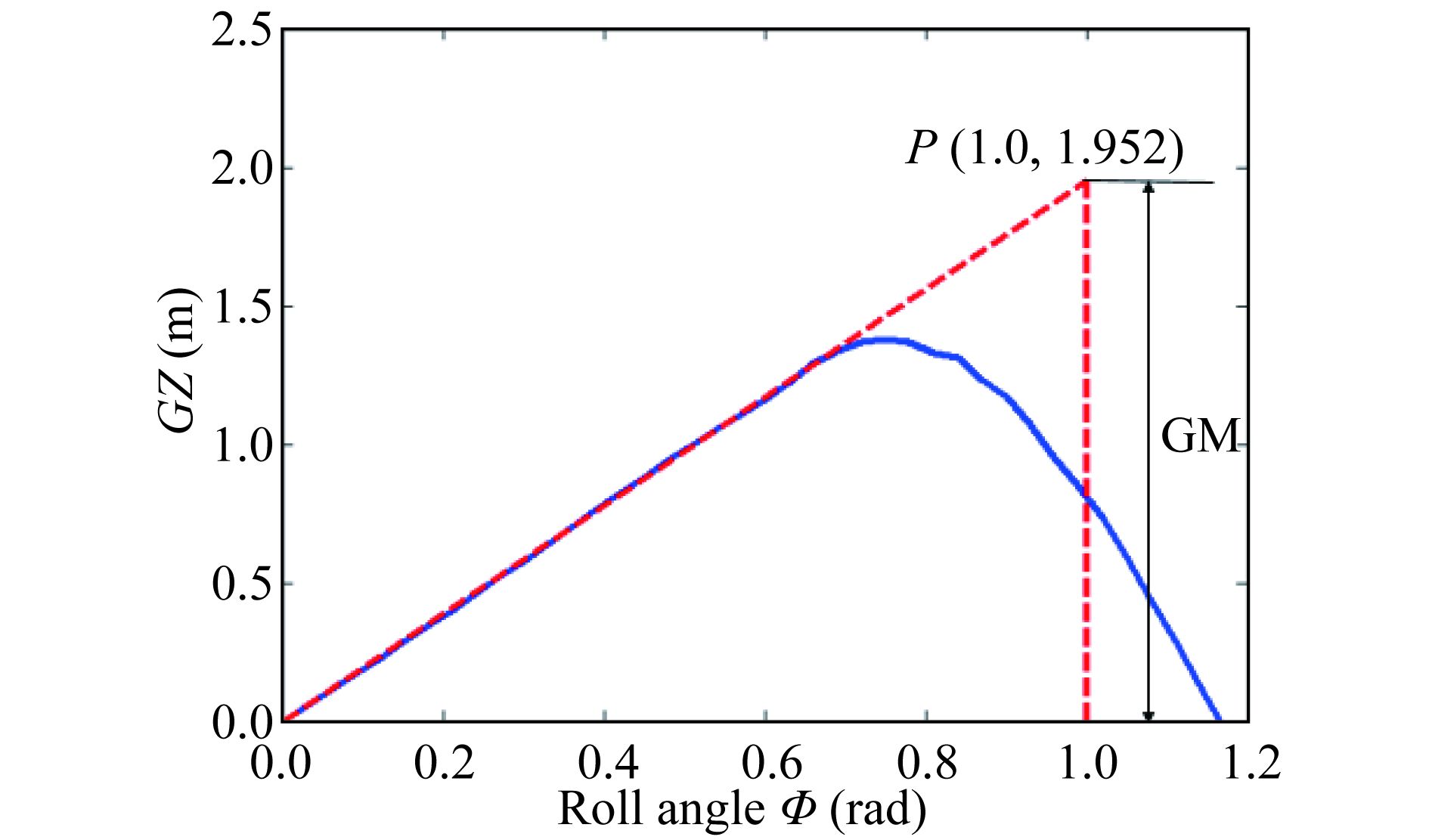
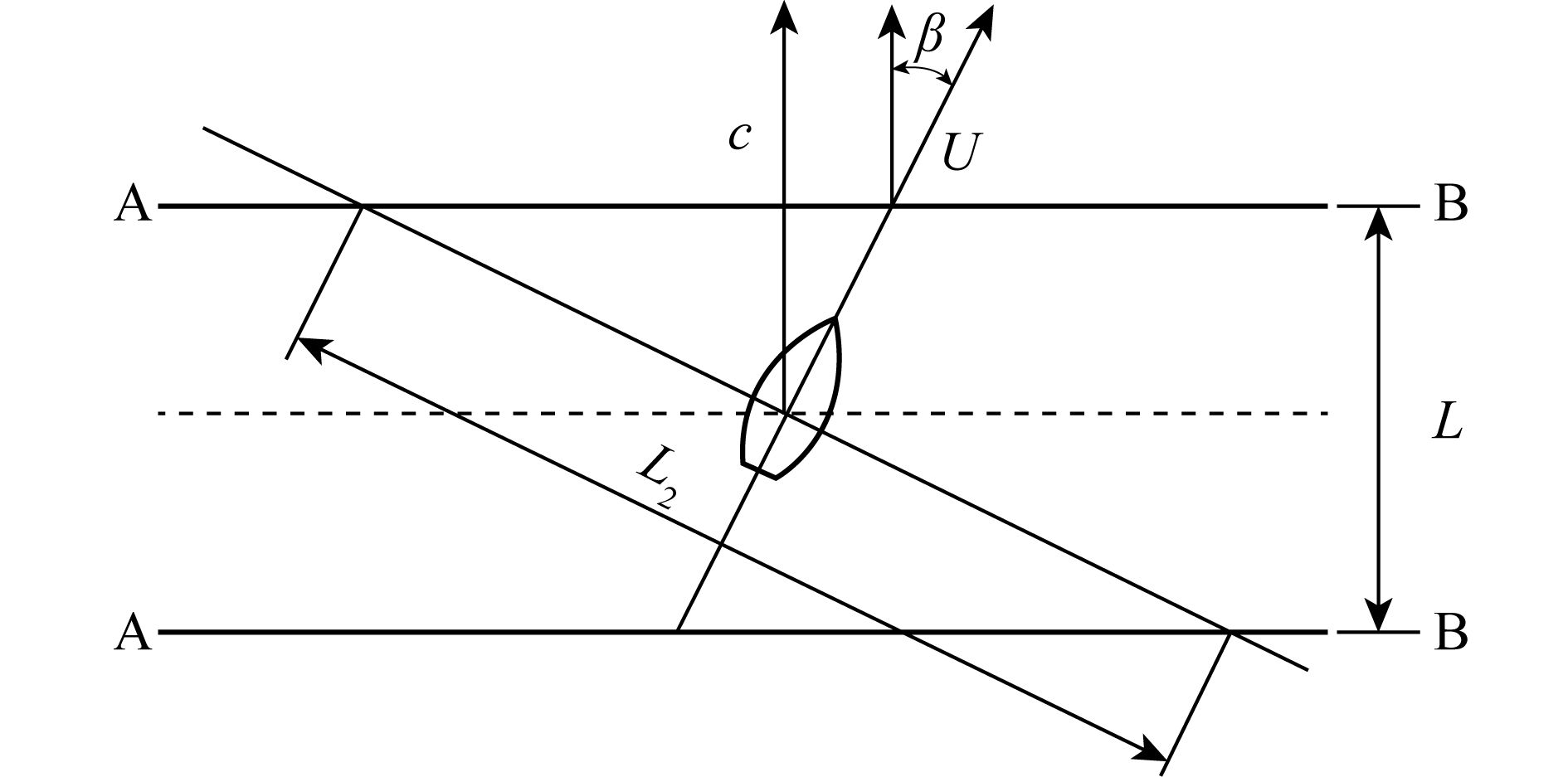
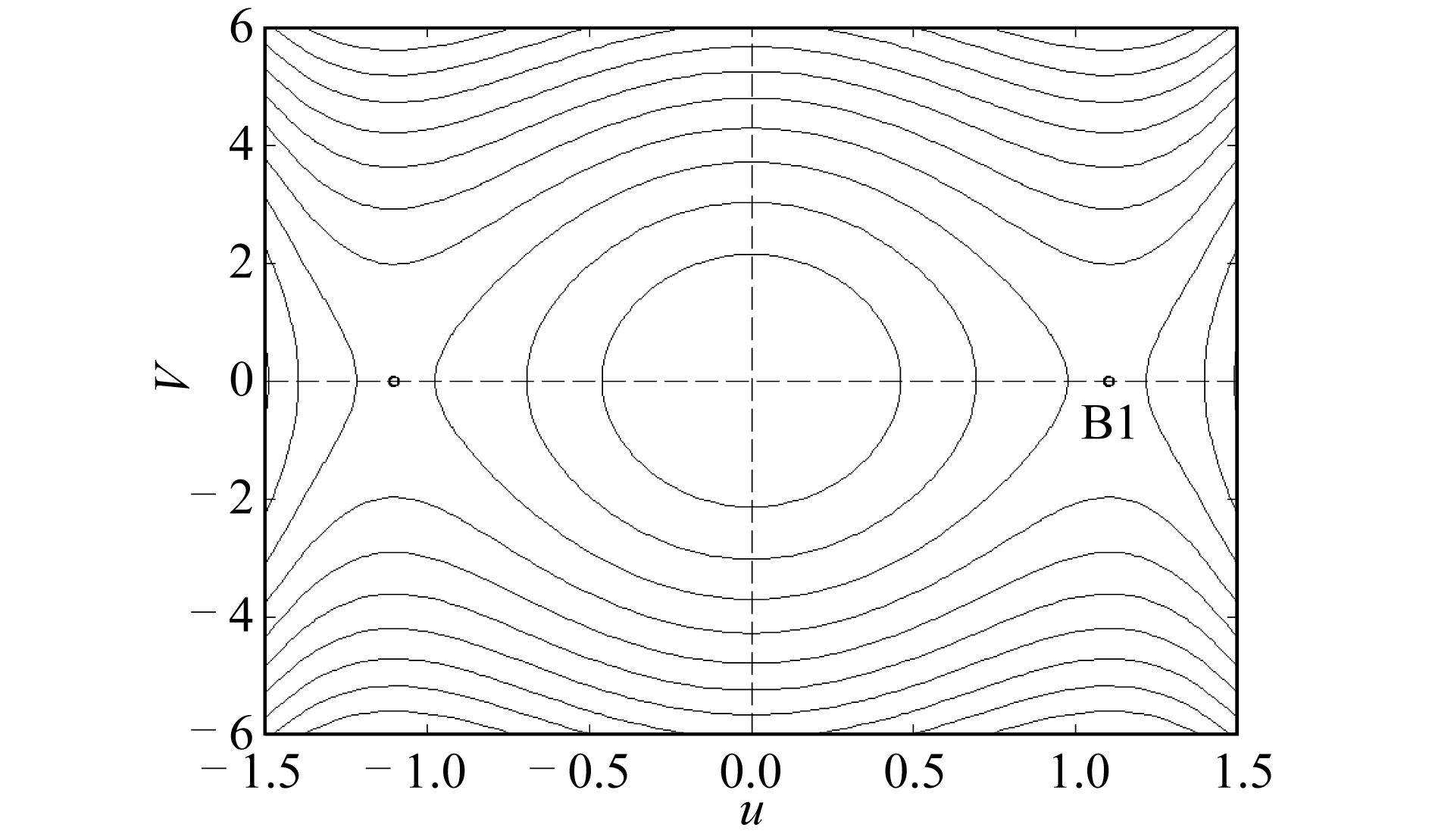
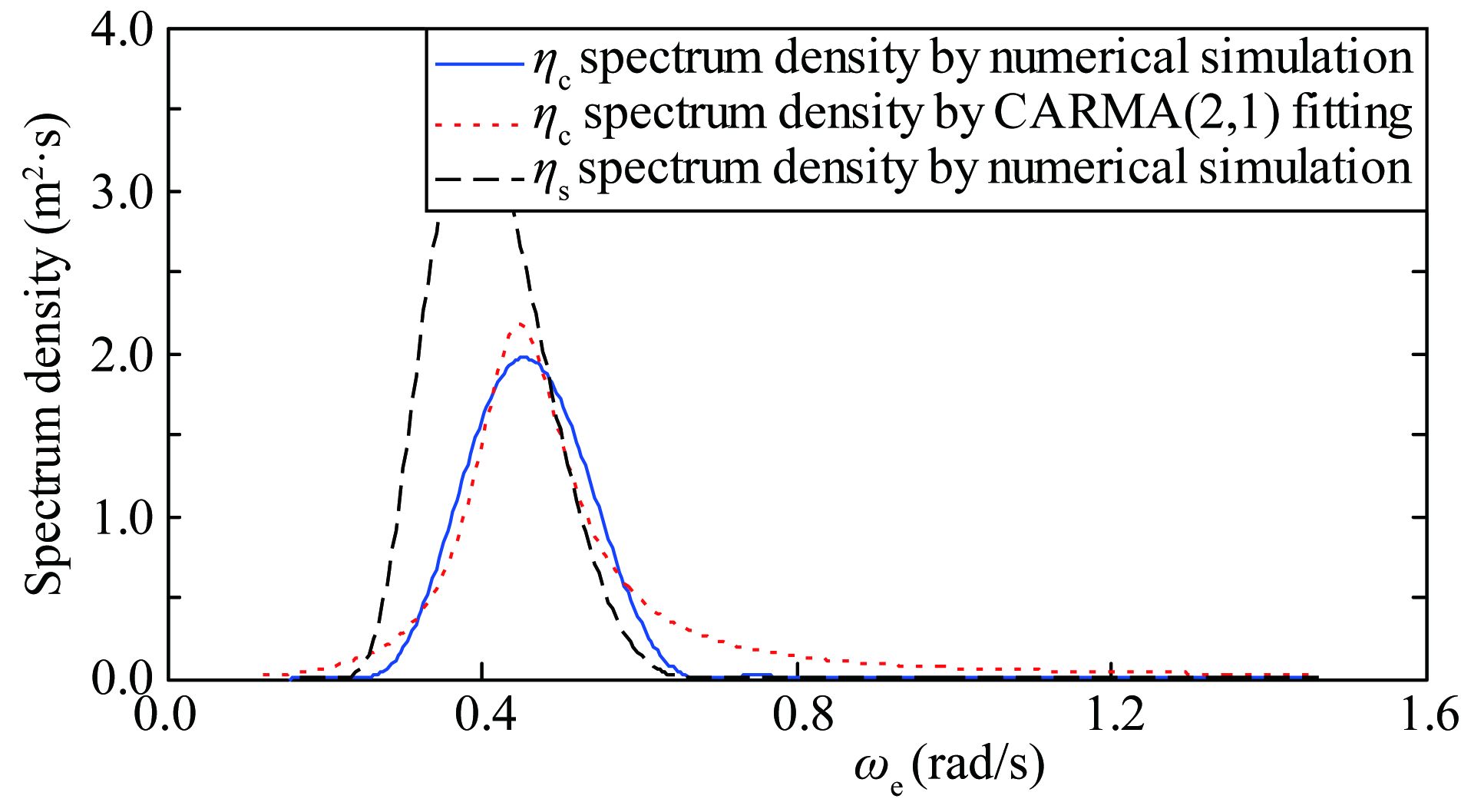
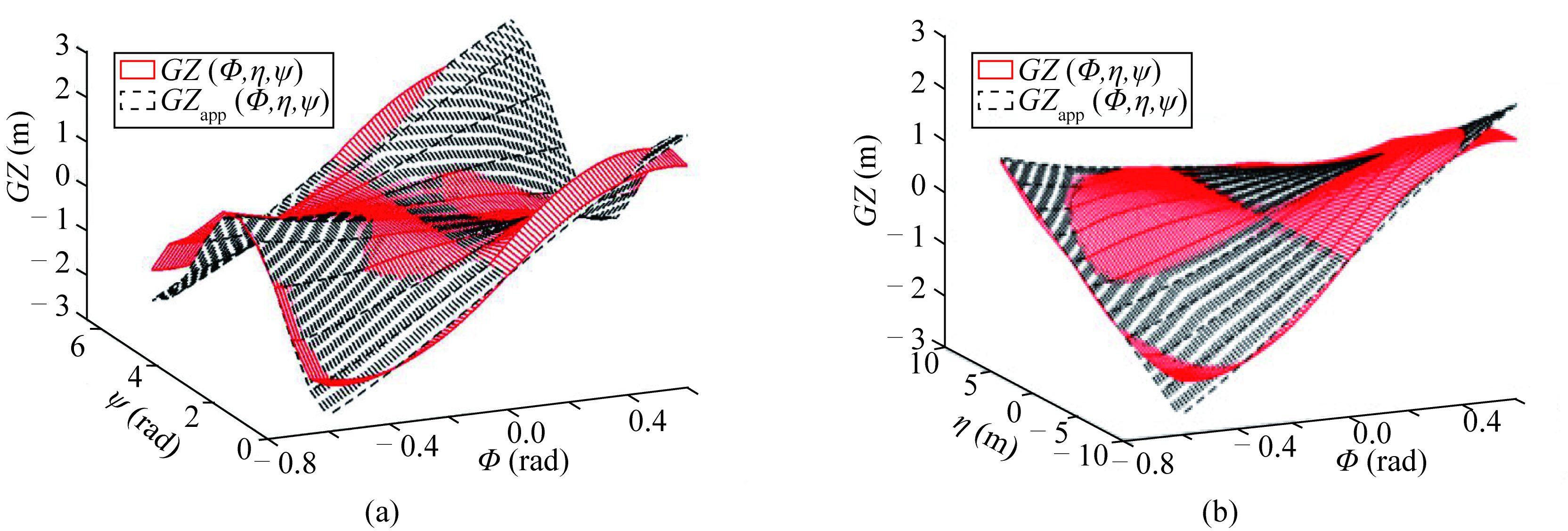
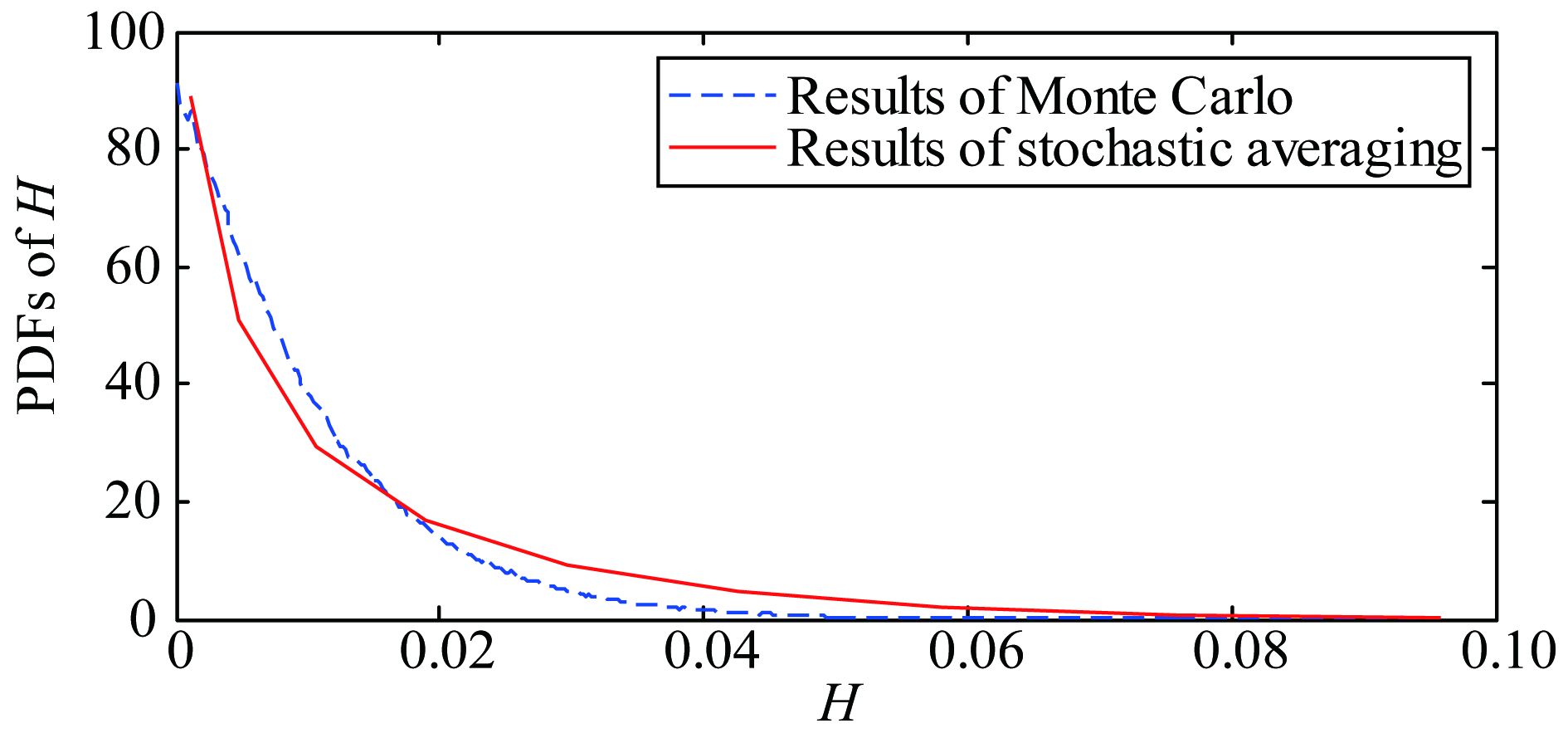
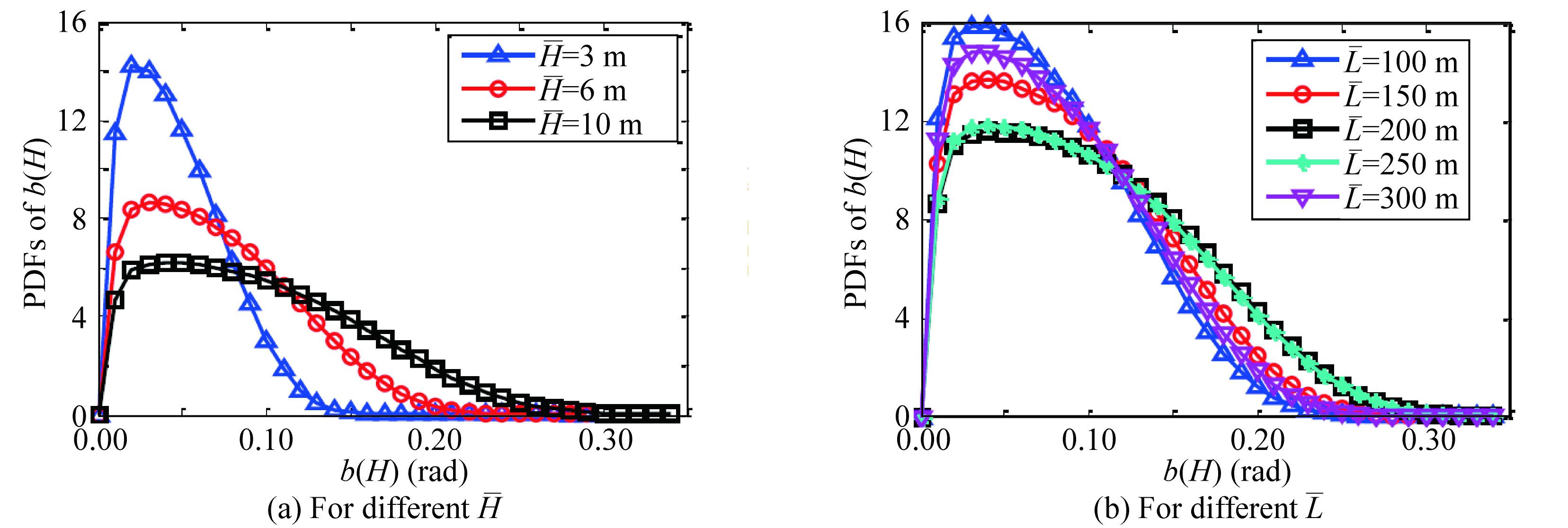
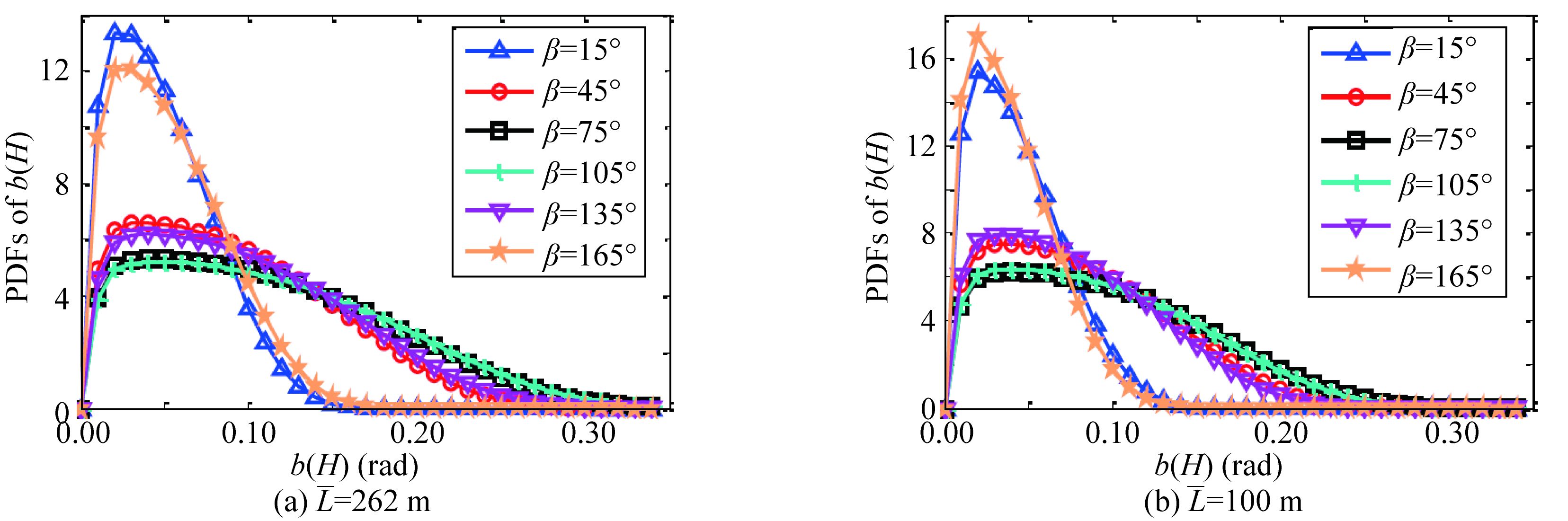
The PDFs (probability density functions) and probability of a ship rolling under the random parametric and forced excitations were studied by a semi-analytical method. The rolling motion equation of the ship in random oblique waves was established. The righting arm obtained by the numerical simulation was approximately fitted by an analytical function. The irregular waves were decomposed into two Gauss stationary random processes, and the CARMA (2, 1) model was used to fit the spectral density function of parametric and forced excitations. The stochastic energy envelope averaging method was used to solve the PDFs and the probability. The validity of the semi-analytical method was verified by the Monte Carlo method. The C11 ship was taken as an example, and the influences of the system parameters on the PDFs and probability were analyzed. The results show that the probability of ship rolling is affected by the characteristic wave height, wave length, and the heading angle. In order to provide proper advice for the ship's manoeuvring, the parametric excitations should be considered appropriately when the ship navigates in the oblique seas.
The PDFs (probability density functions) and probability of a ship rolling under the random parametric and forced excitations were studied by a semi-analytical method. The rolling motion equation of the ship in random oblique waves was established. The righting arm obtained by the numerical simulation was approximately fitted by an analytical function. The irregular waves were decomposed into two Gauss stationary random processes, and the CARMA (2, 1) model was used to fit the spectral density function of parametric and forced excitations. The stochastic energy envelope averaging method was used to solve the PDFs and the probability. The validity of the semi-analytical method was verified by the Monte Carlo method. The C11 ship was taken as an example, and the influences of the system parameters on the PDFs and probability were analyzed. The results show that the probability of ship rolling is affected by the characteristic wave height, wave length, and the heading angle. In order to provide proper advice for the ship's manoeuvring, the parametric excitations should be considered appropriately when the ship navigates in the oblique seas.
2018, 32(1): 85-89.
doi: 10.1007/s13344-018-0009-x
Abstract:
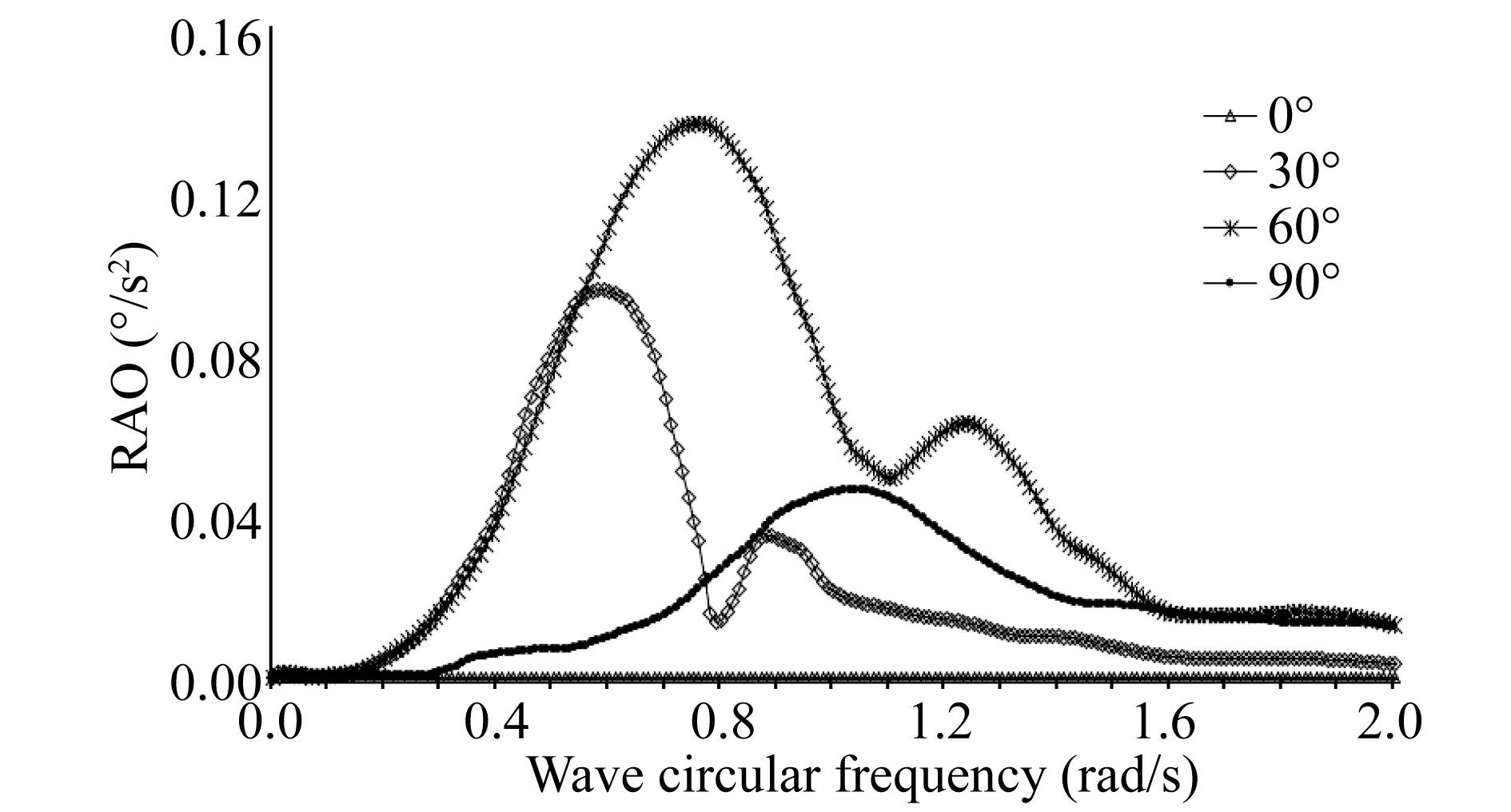
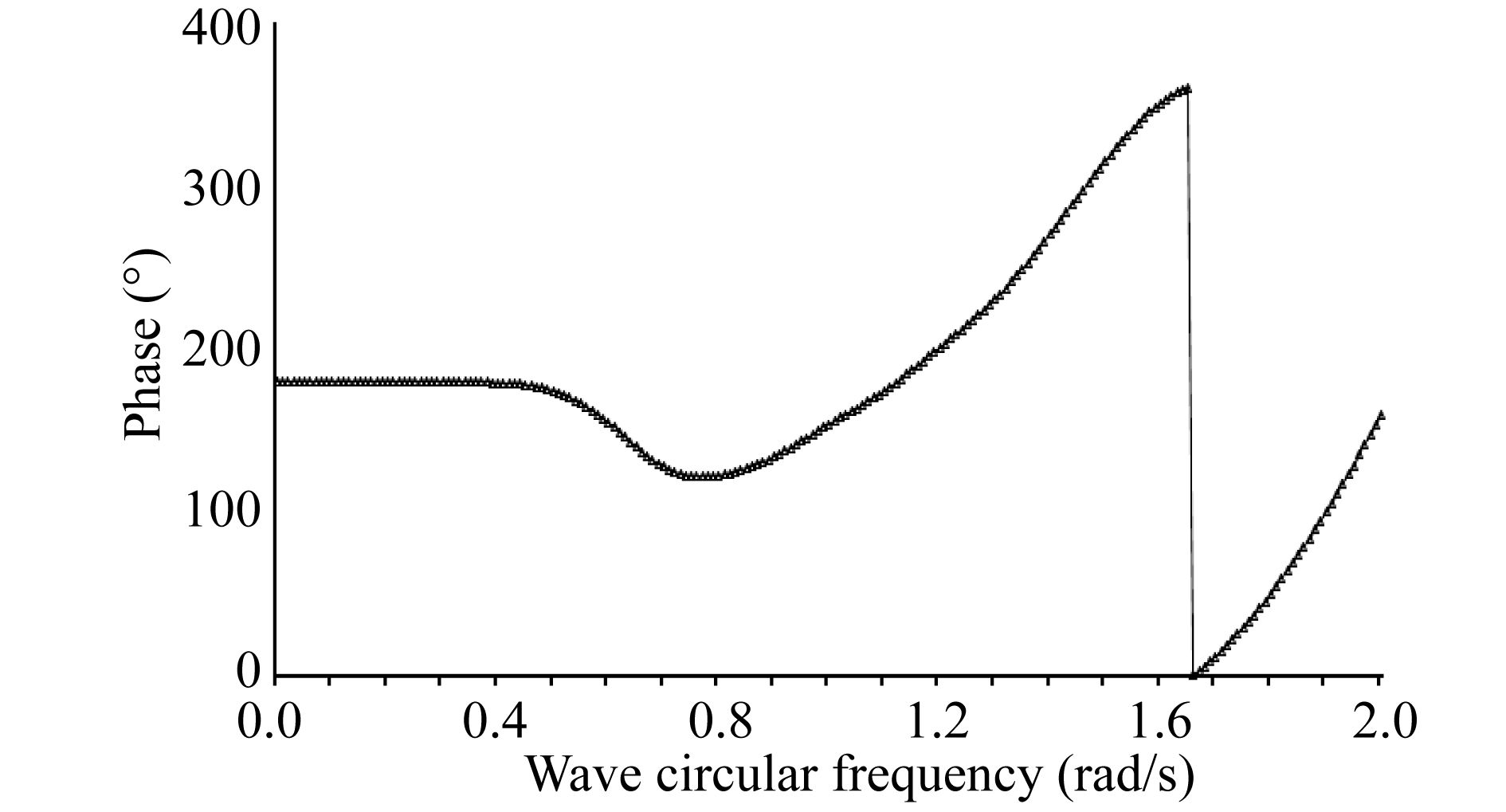
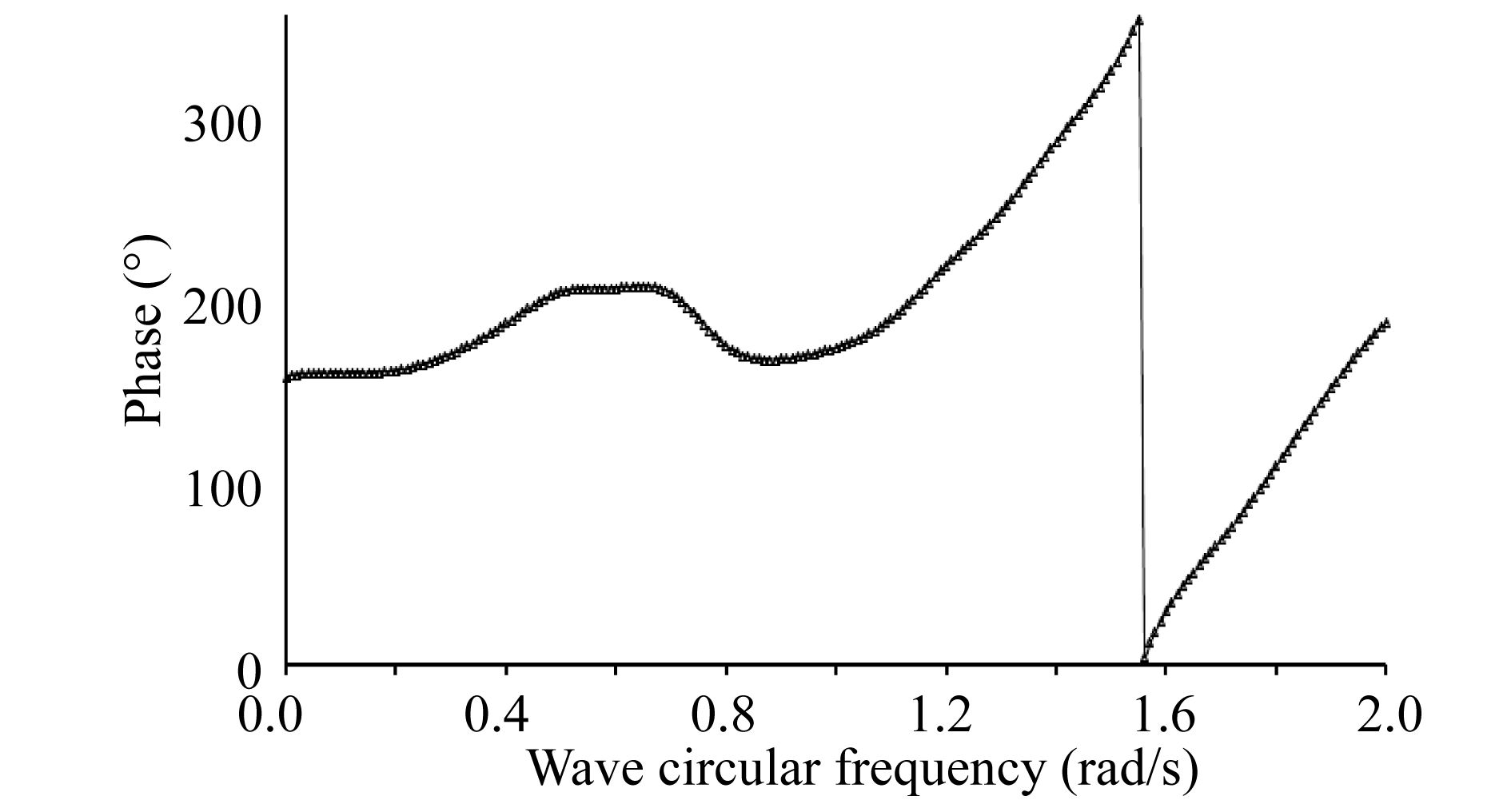
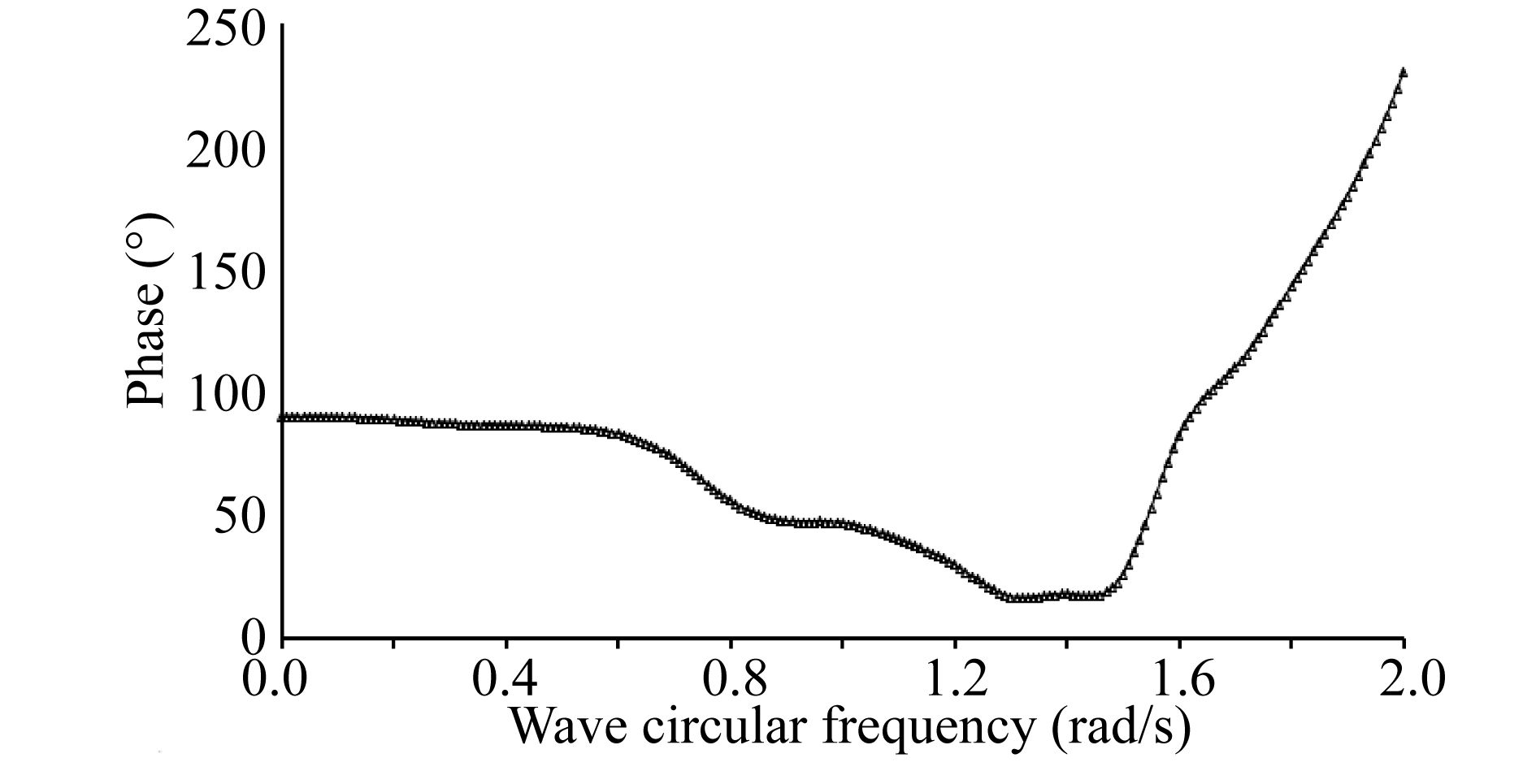
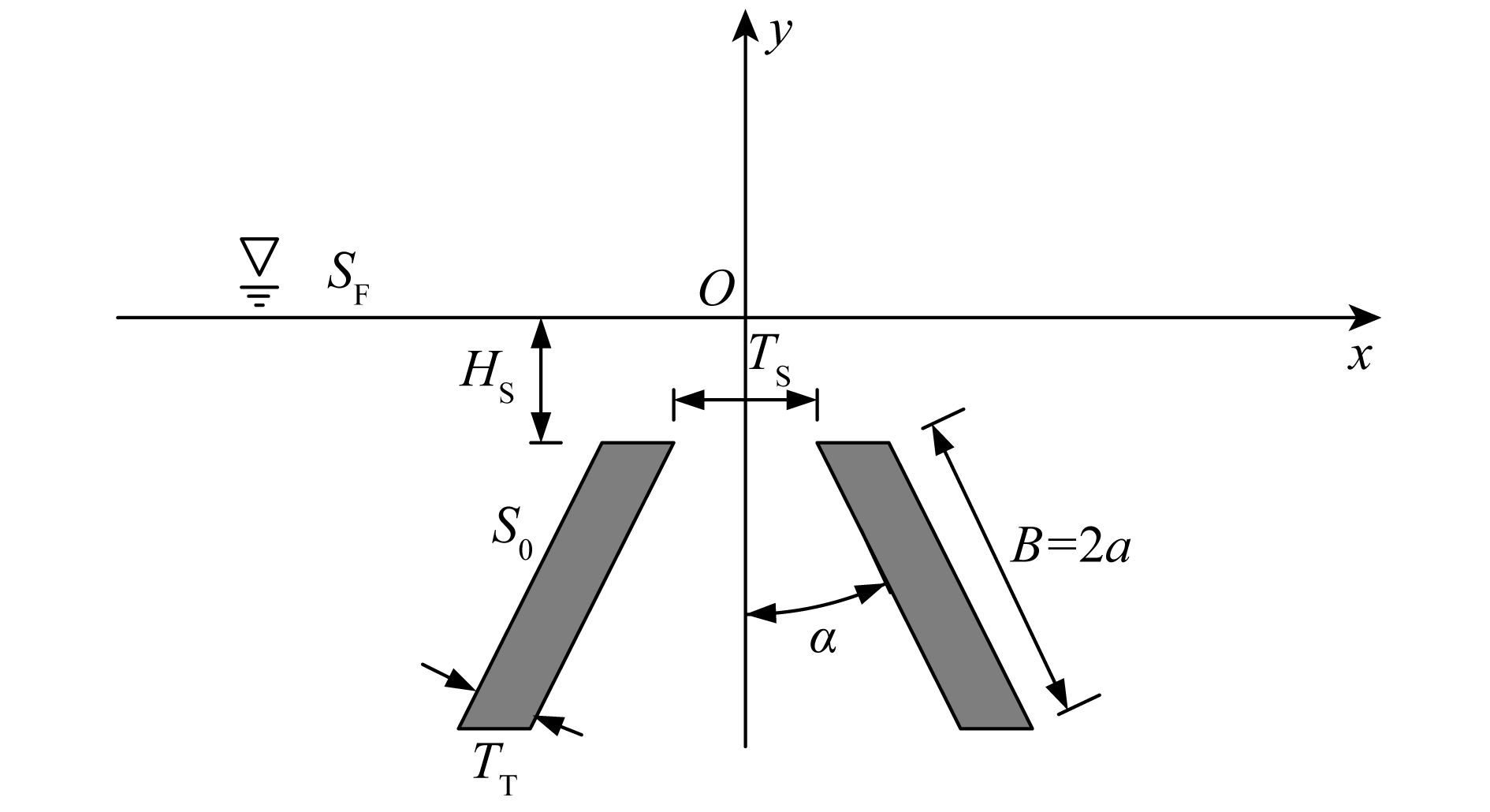
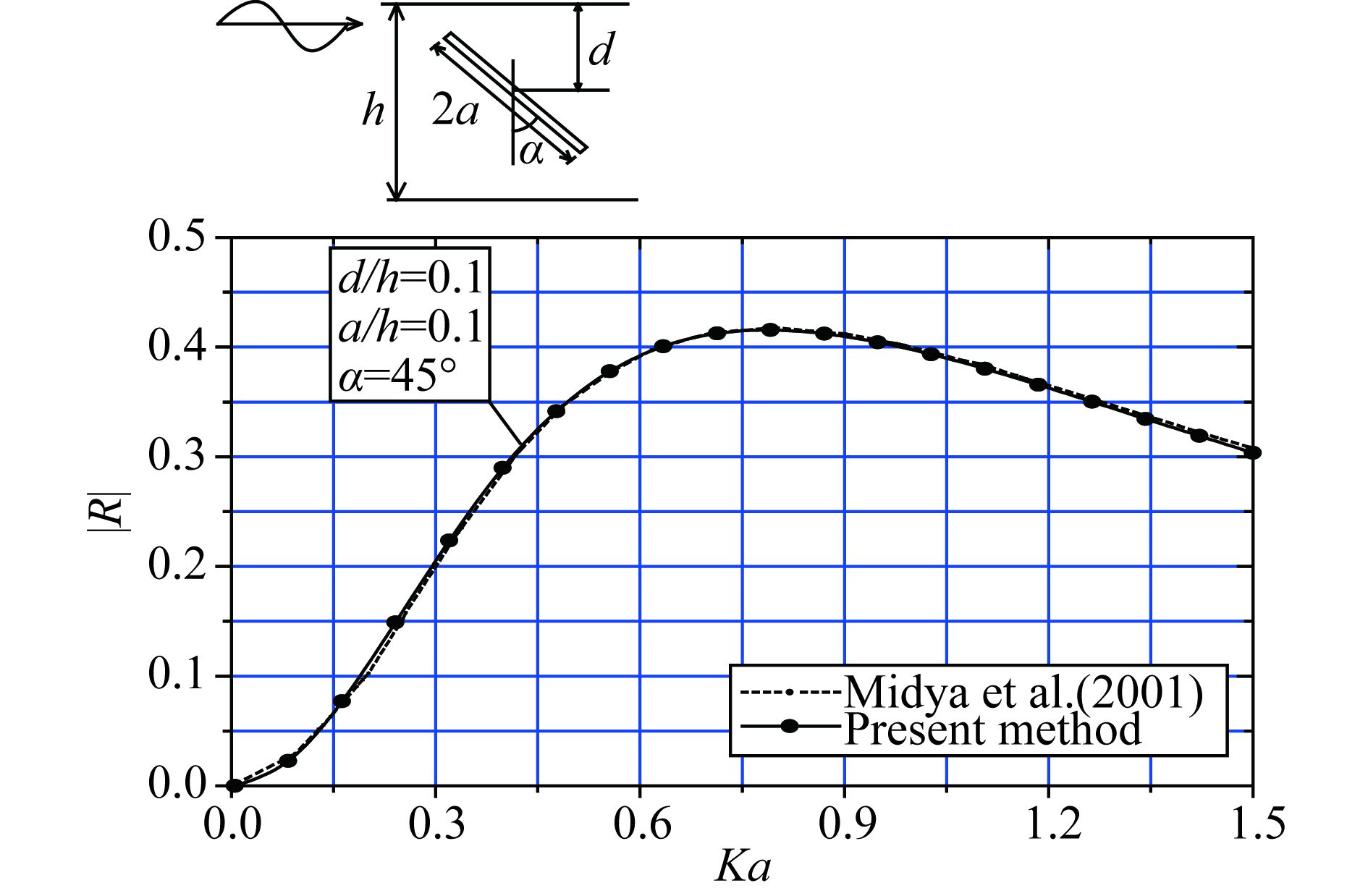
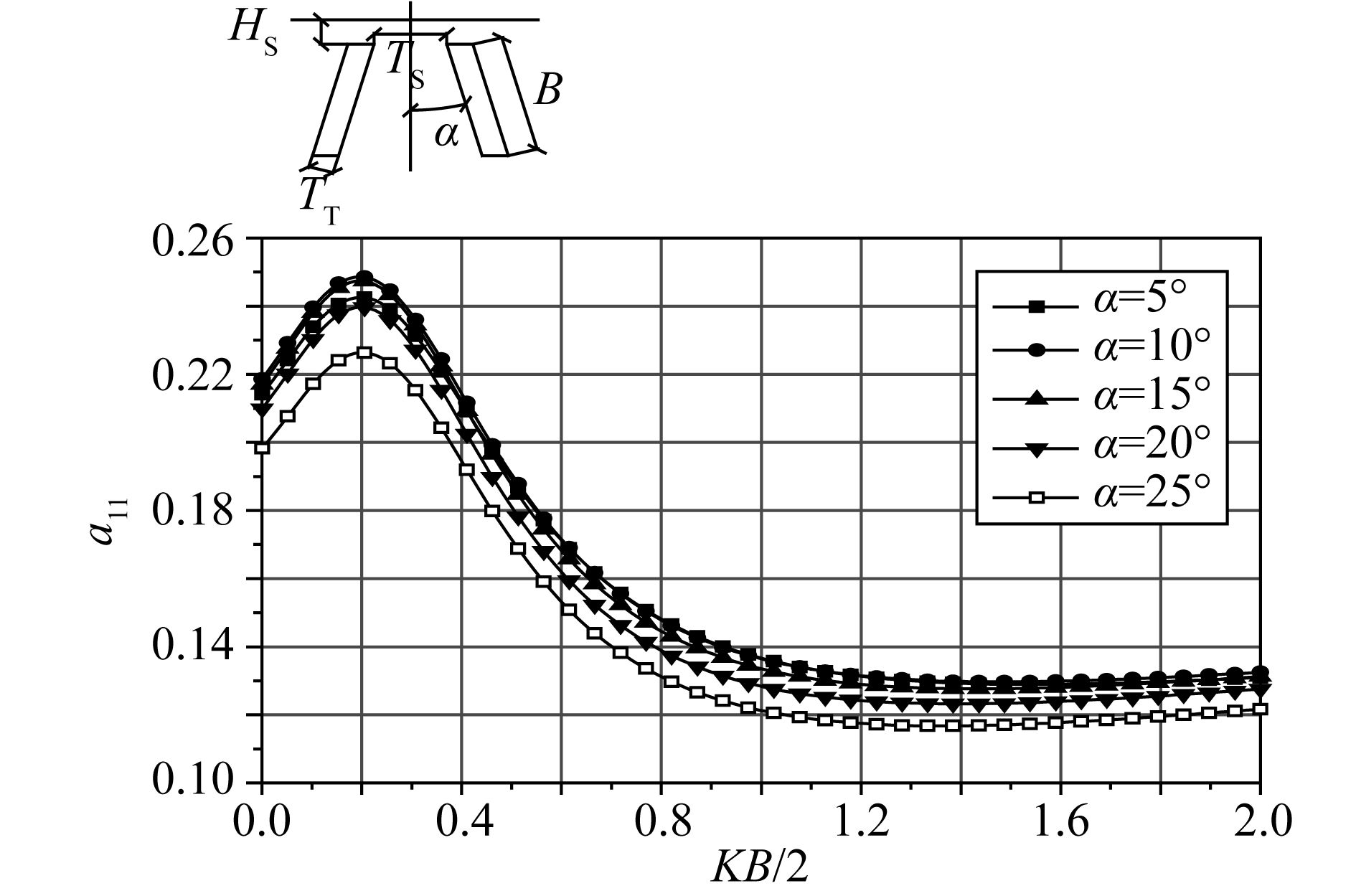
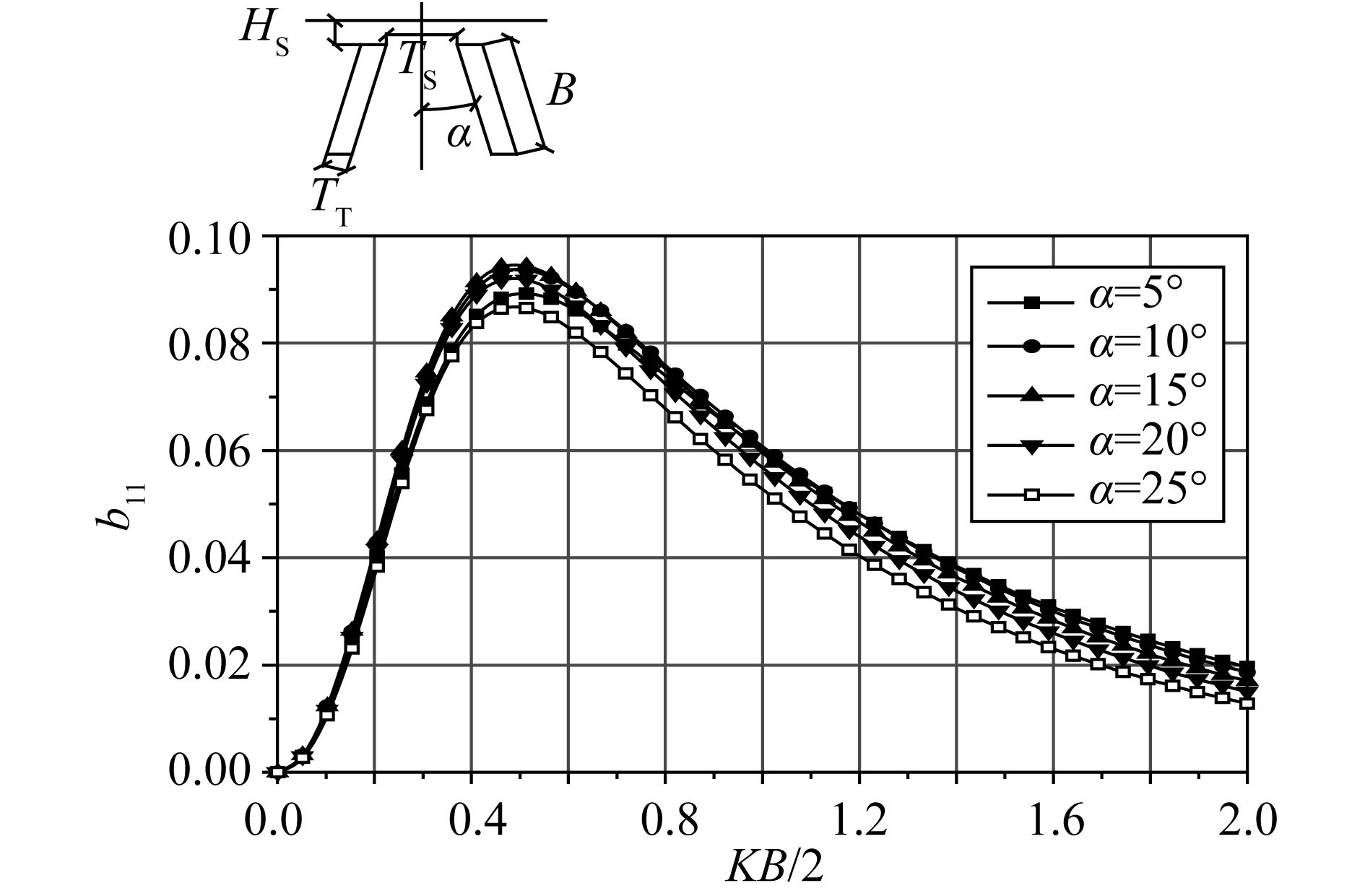
Added mass and damping coefficients are very important in hydrodynamic analysis of naval structures. In this paper, a double submerged inclined plates with ‘/ \’ configuration is firstly considered. By use of the boundary element method (BEM) based on Green function with the wave term, the radiation problem of this special type structure is investigated. The added mass and damping coefficients due to different plate lengths and inclined angles are obtained. The results show that: the added mass and damping coefficients for sway are the largest. Heave is the most sensitive mode to inclined angles. The wave frequencies of the maximal added mass and damping coefficients for sway and roll are the same.
Added mass and damping coefficients are very important in hydrodynamic analysis of naval structures. In this paper, a double submerged inclined plates with ‘/ \’ configuration is firstly considered. By use of the boundary element method (BEM) based on Green function with the wave term, the radiation problem of this special type structure is investigated. The added mass and damping coefficients due to different plate lengths and inclined angles are obtained. The results show that: the added mass and damping coefficients for sway are the largest. Heave is the most sensitive mode to inclined angles. The wave frequencies of the maximal added mass and damping coefficients for sway and roll are the same.
2018, 32(1): 90-98.
doi: 10.1007/s13344-018-0010-4
Abstract:
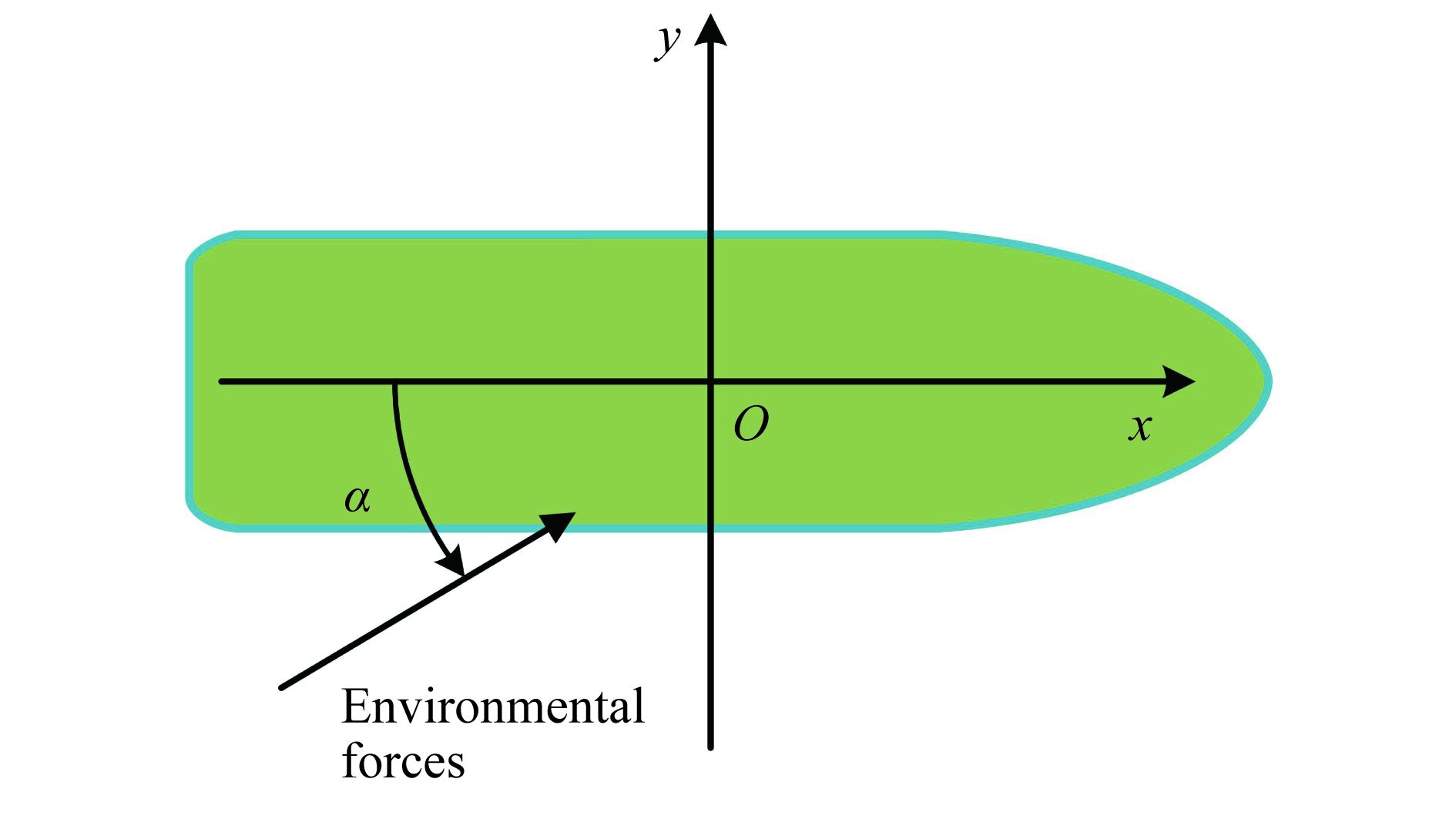
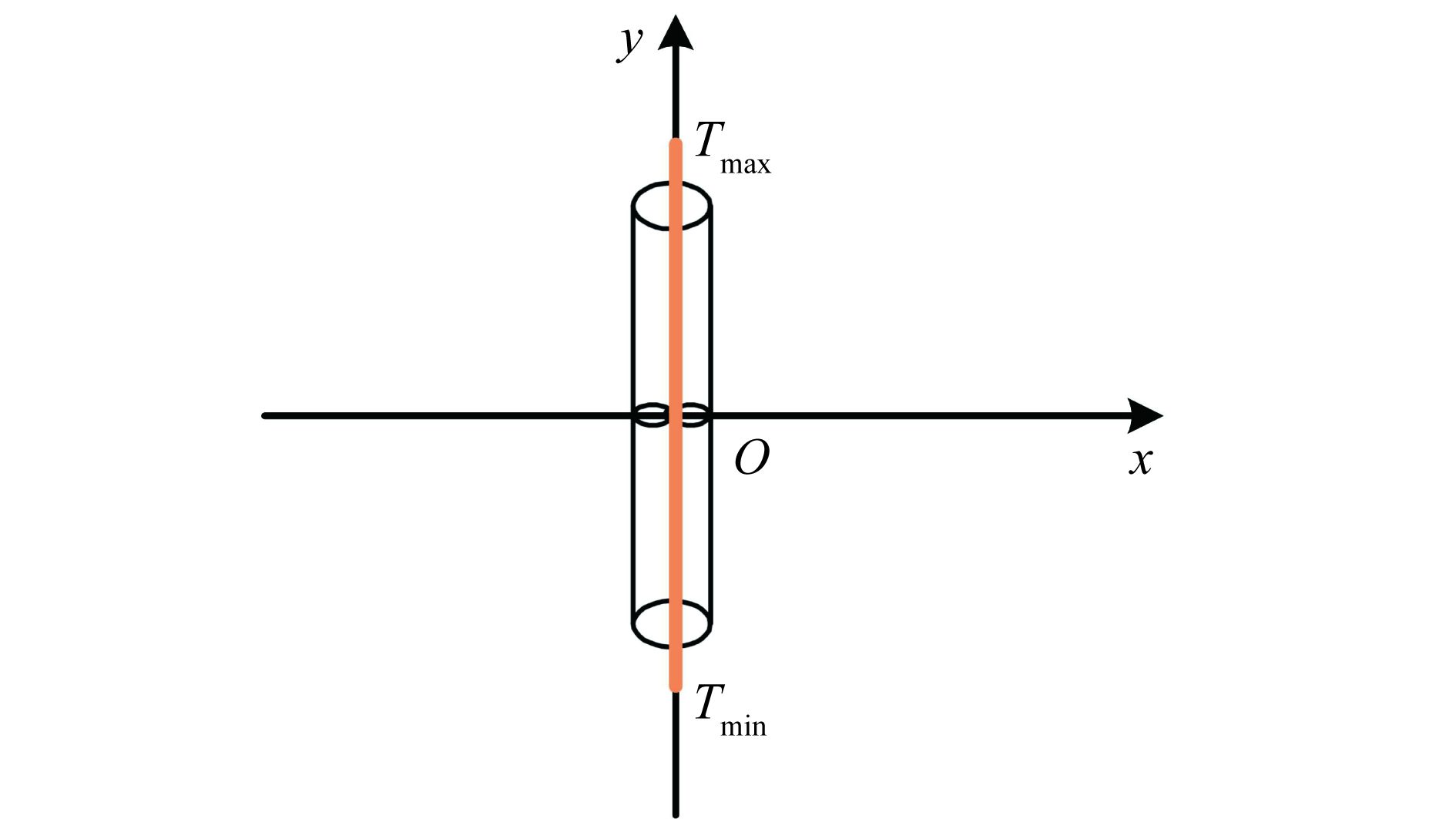
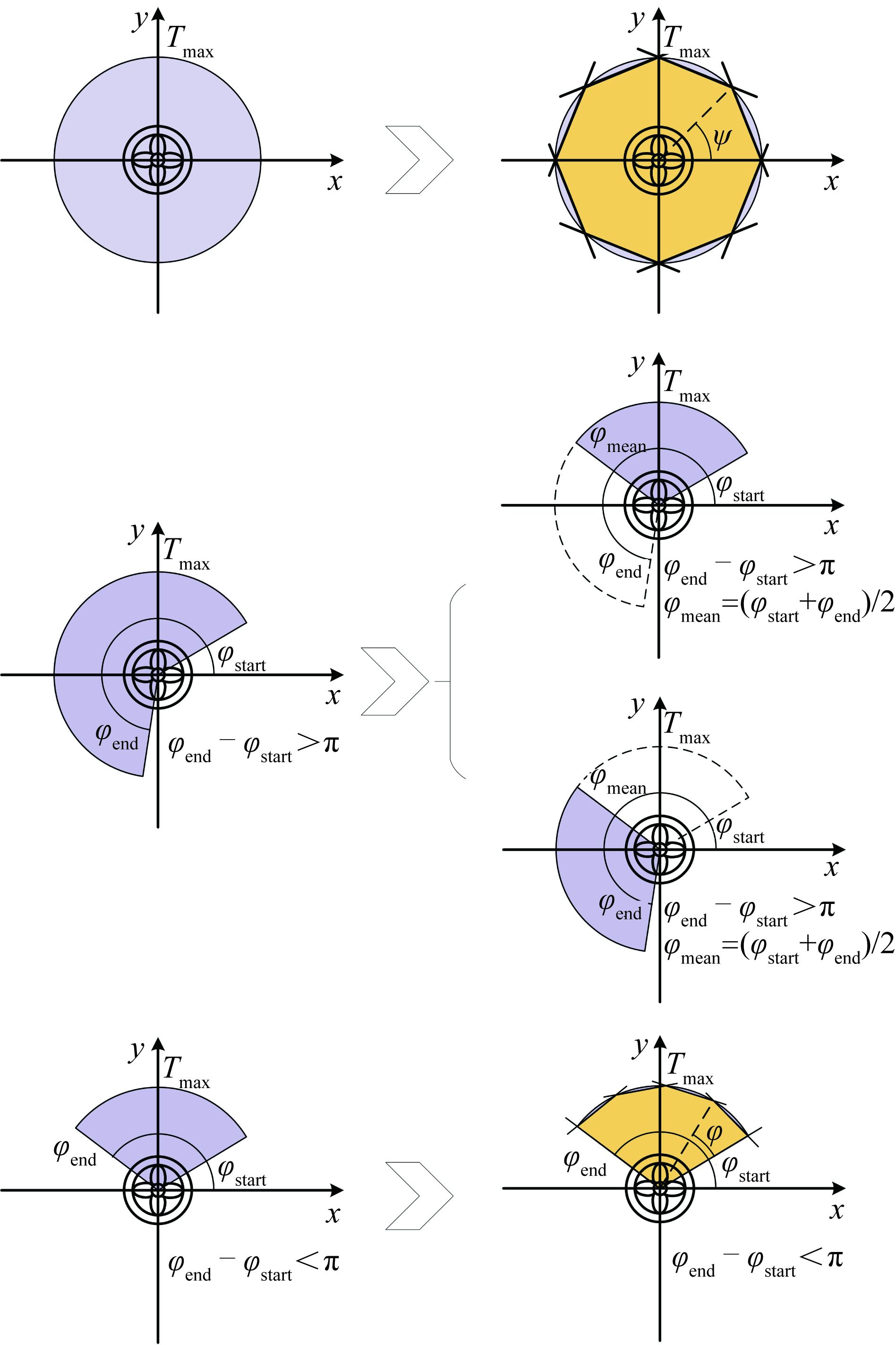
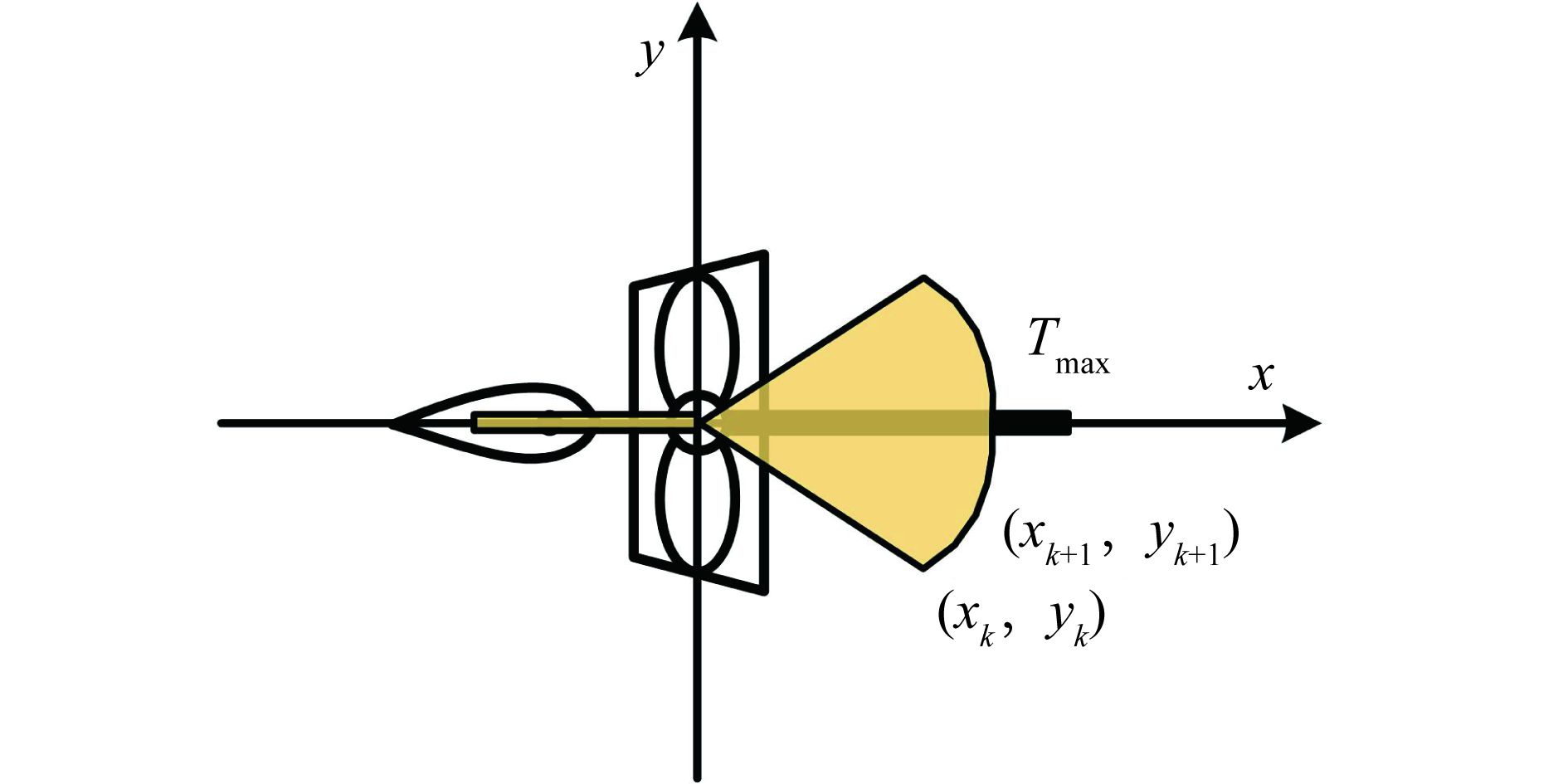
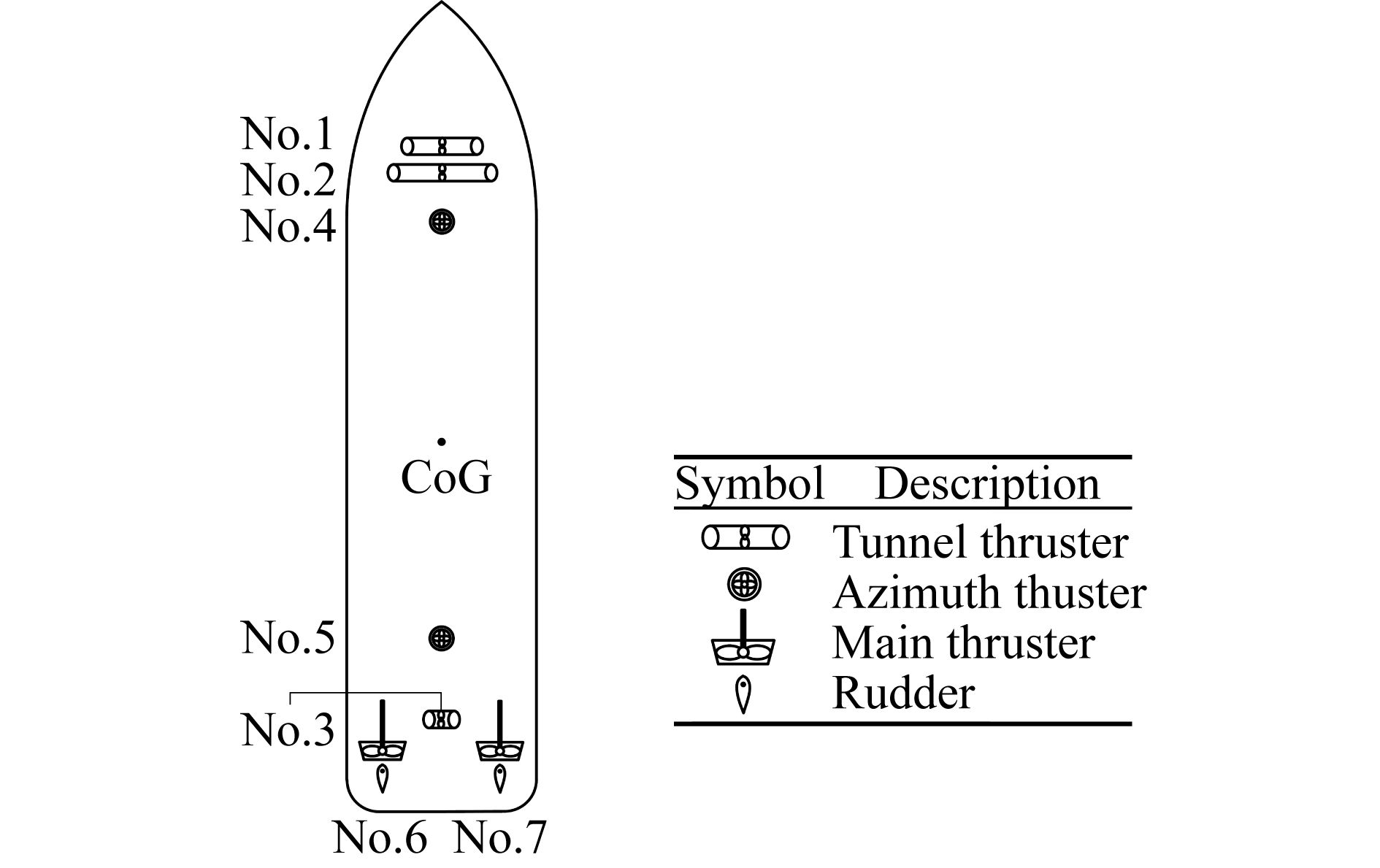
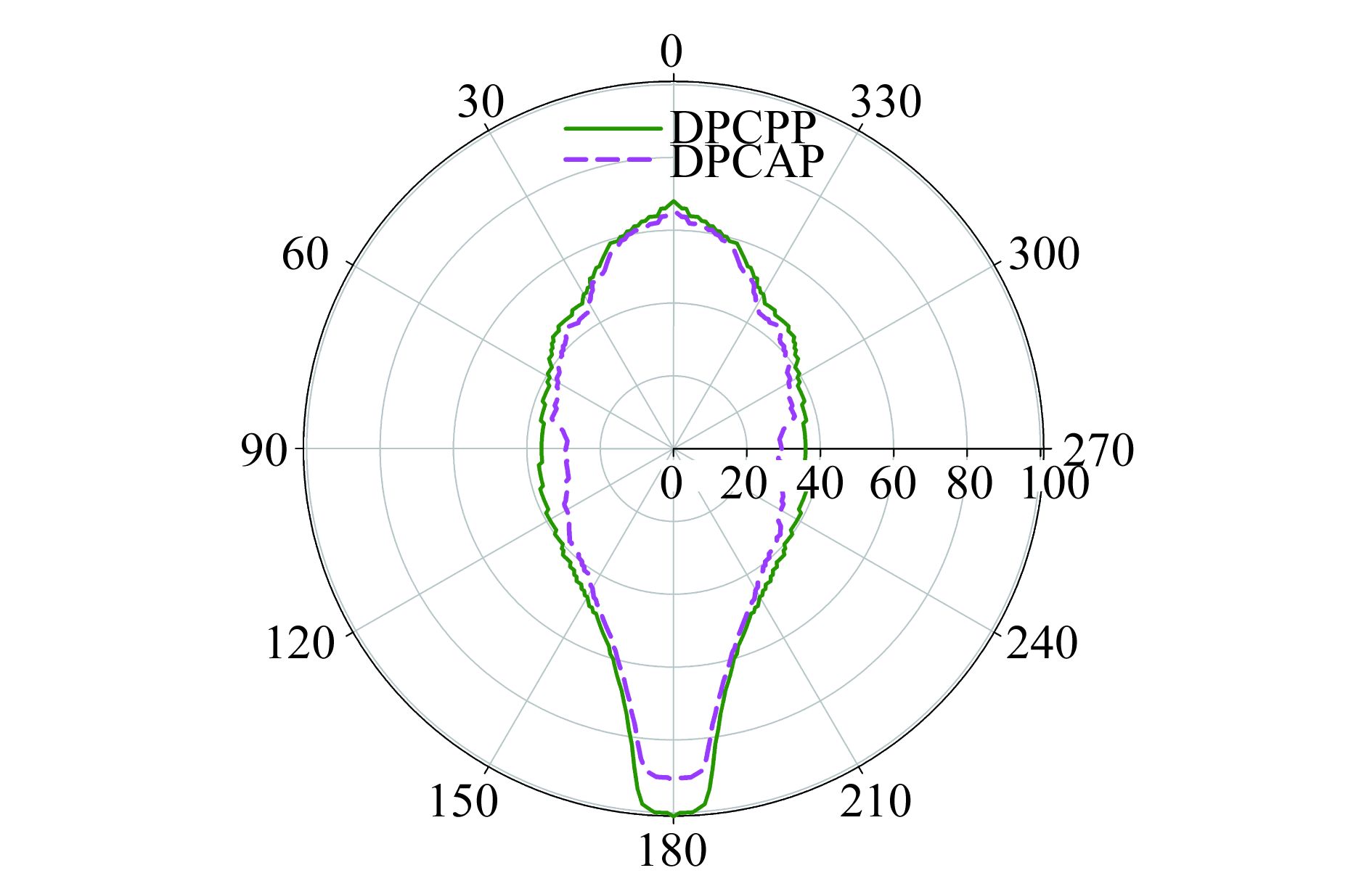
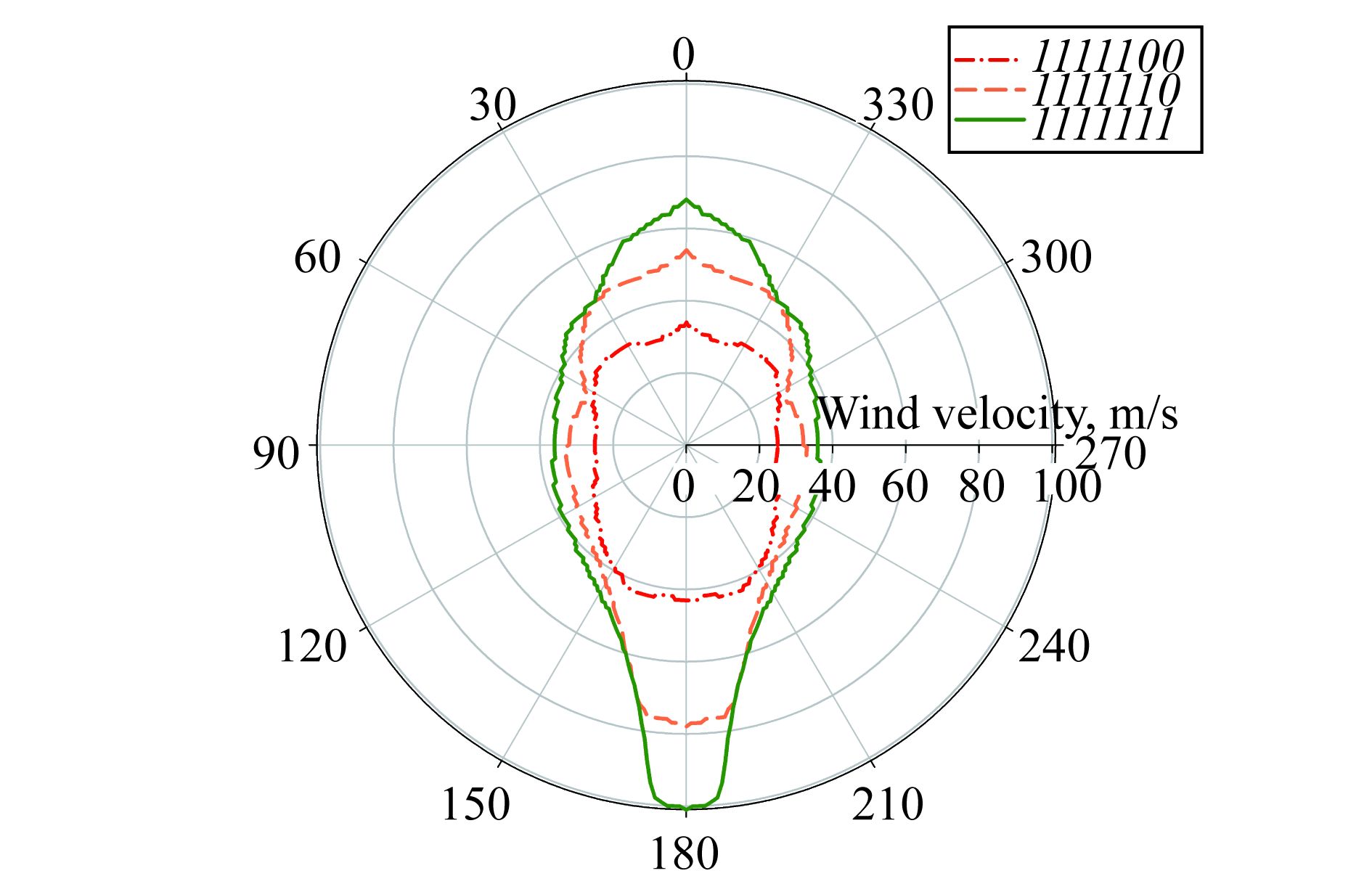
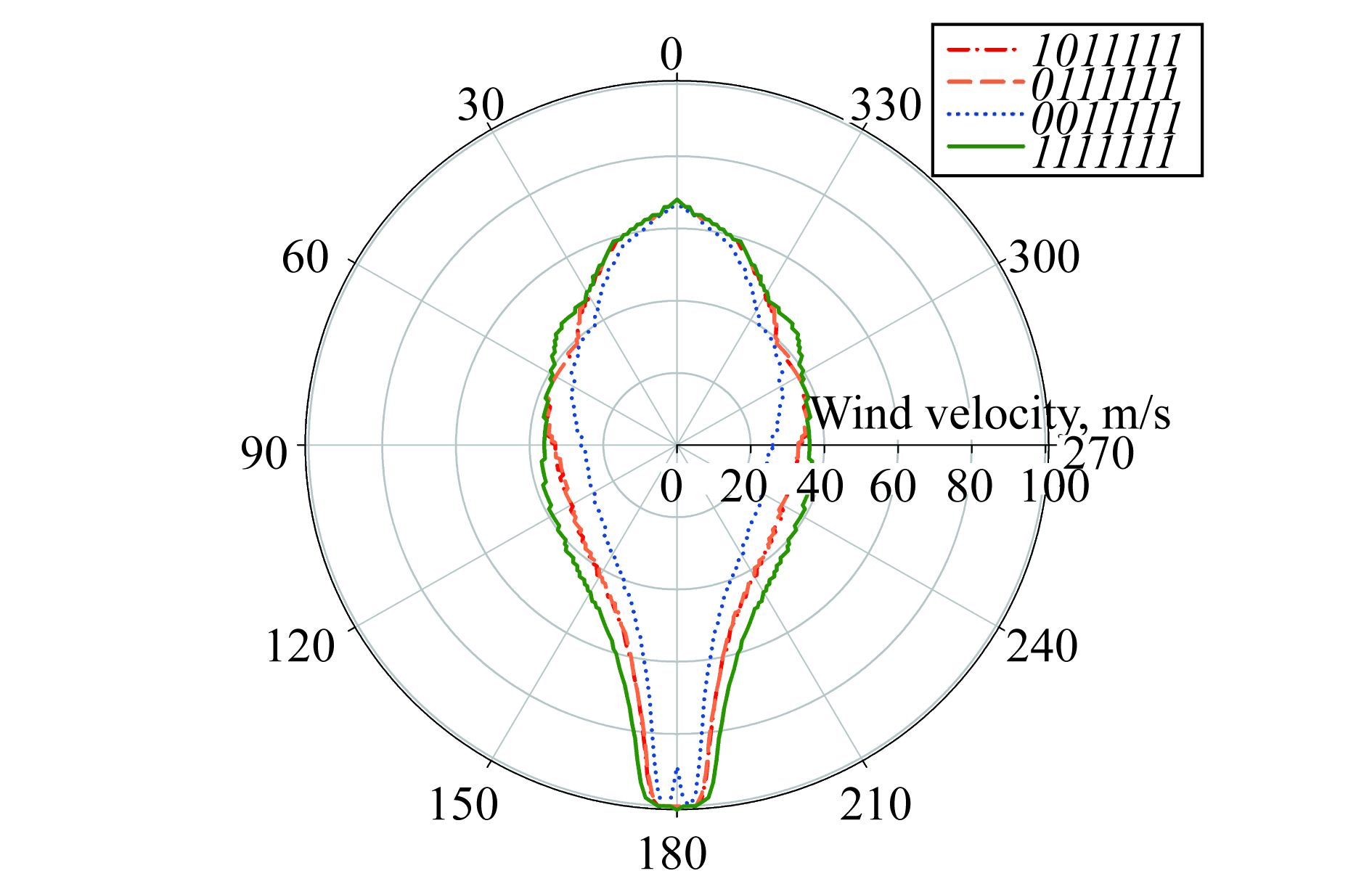
Dynamic positioning capability (DPCap) analysis is essential in the selection of thrusters, in their configuration, and during preliminary investigation of the positioning ability of a newly designed vessel dynamic positioning system. DPCap analysis can help determine the maximum environmental forces, in which the DP system can counteract in given headings. The accuracy of the DPCap analysis is determined by the precise estimation of the environmental forces as well as the effectiveness of the thrust allocation logic. This paper is dedicated to developing an effective and efficient software program for the DPCap analysis for marine vessels. Estimation of the environmental forces can be obtained by model tests, hydrodynamic computation and empirical formulas. A quadratic programming method is adopted to allocate the total thrust on every thruster of the vessel. A detailed description of the thrust allocation logic of the software program is given. The effectiveness of the new program DPCap Polar Plot (DPCPP) was validated by a DPCap analysis for a supply vessel. The present study indicates that the developed program can be used in the DPCap analysis for marine vessels. Moreover, DPCap analysis considering the thruster failure mode might give guidance to the designers of vessels whose thrusters need to be safer.
Dynamic positioning capability (DPCap) analysis is essential in the selection of thrusters, in their configuration, and during preliminary investigation of the positioning ability of a newly designed vessel dynamic positioning system. DPCap analysis can help determine the maximum environmental forces, in which the DP system can counteract in given headings. The accuracy of the DPCap analysis is determined by the precise estimation of the environmental forces as well as the effectiveness of the thrust allocation logic. This paper is dedicated to developing an effective and efficient software program for the DPCap analysis for marine vessels. Estimation of the environmental forces can be obtained by model tests, hydrodynamic computation and empirical formulas. A quadratic programming method is adopted to allocate the total thrust on every thruster of the vessel. A detailed description of the thrust allocation logic of the software program is given. The effectiveness of the new program DPCap Polar Plot (DPCPP) was validated by a DPCap analysis for a supply vessel. The present study indicates that the developed program can be used in the DPCap analysis for marine vessels. Moreover, DPCap analysis considering the thruster failure mode might give guidance to the designers of vessels whose thrusters need to be safer.
2018, 32(1): 99-109.
doi: 10.1007/s13344-018-0011-3
Abstract:
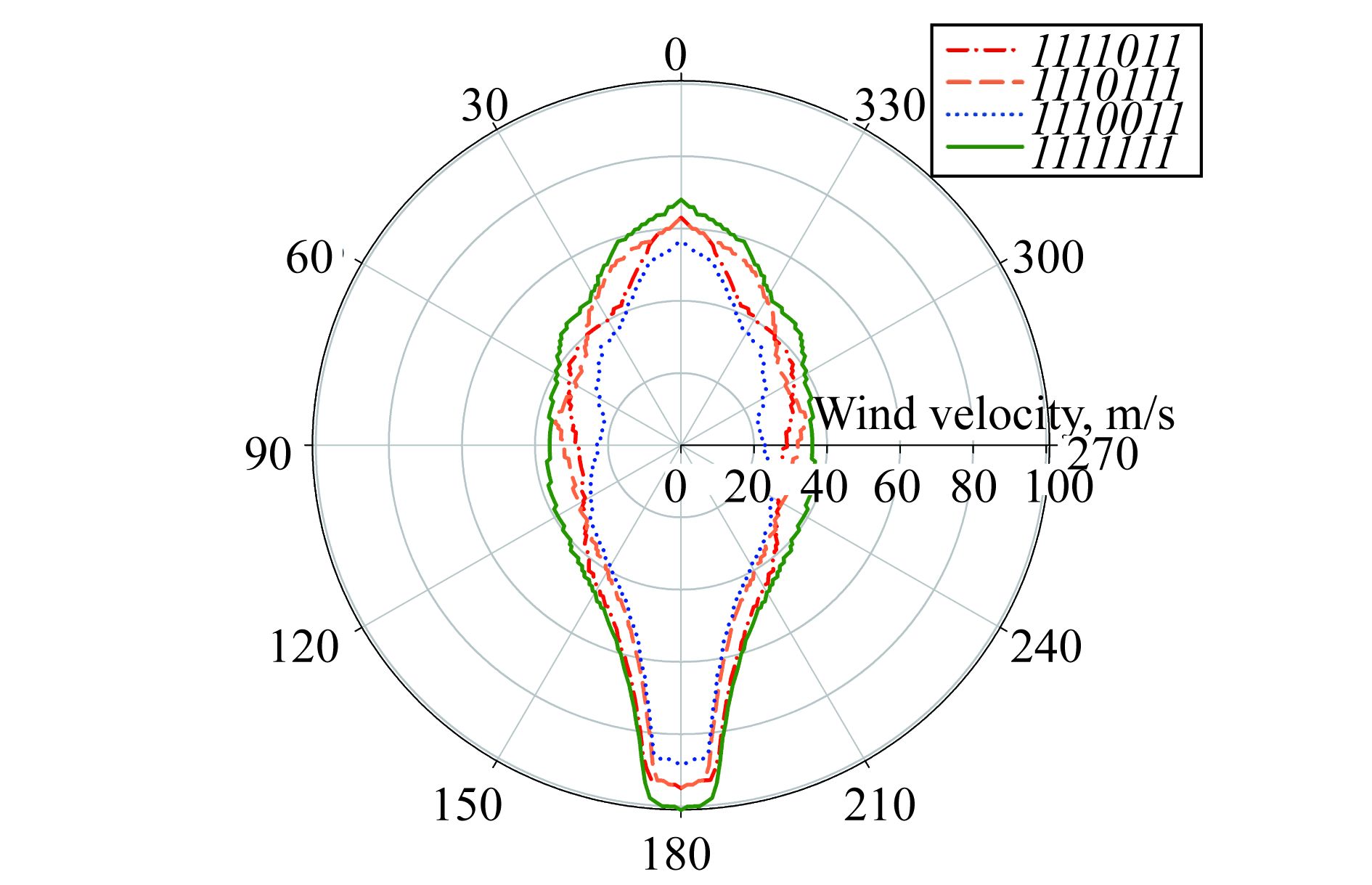
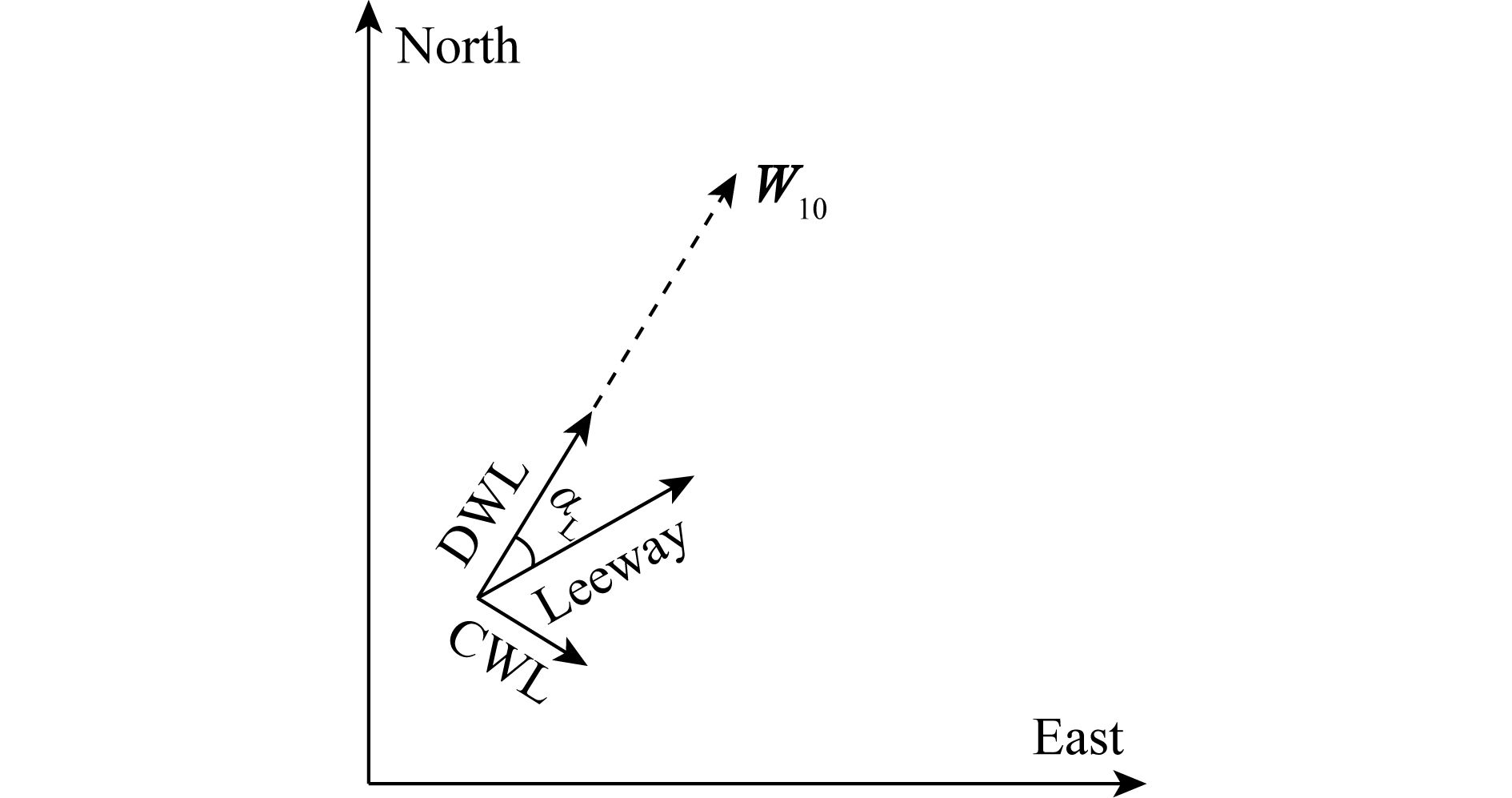
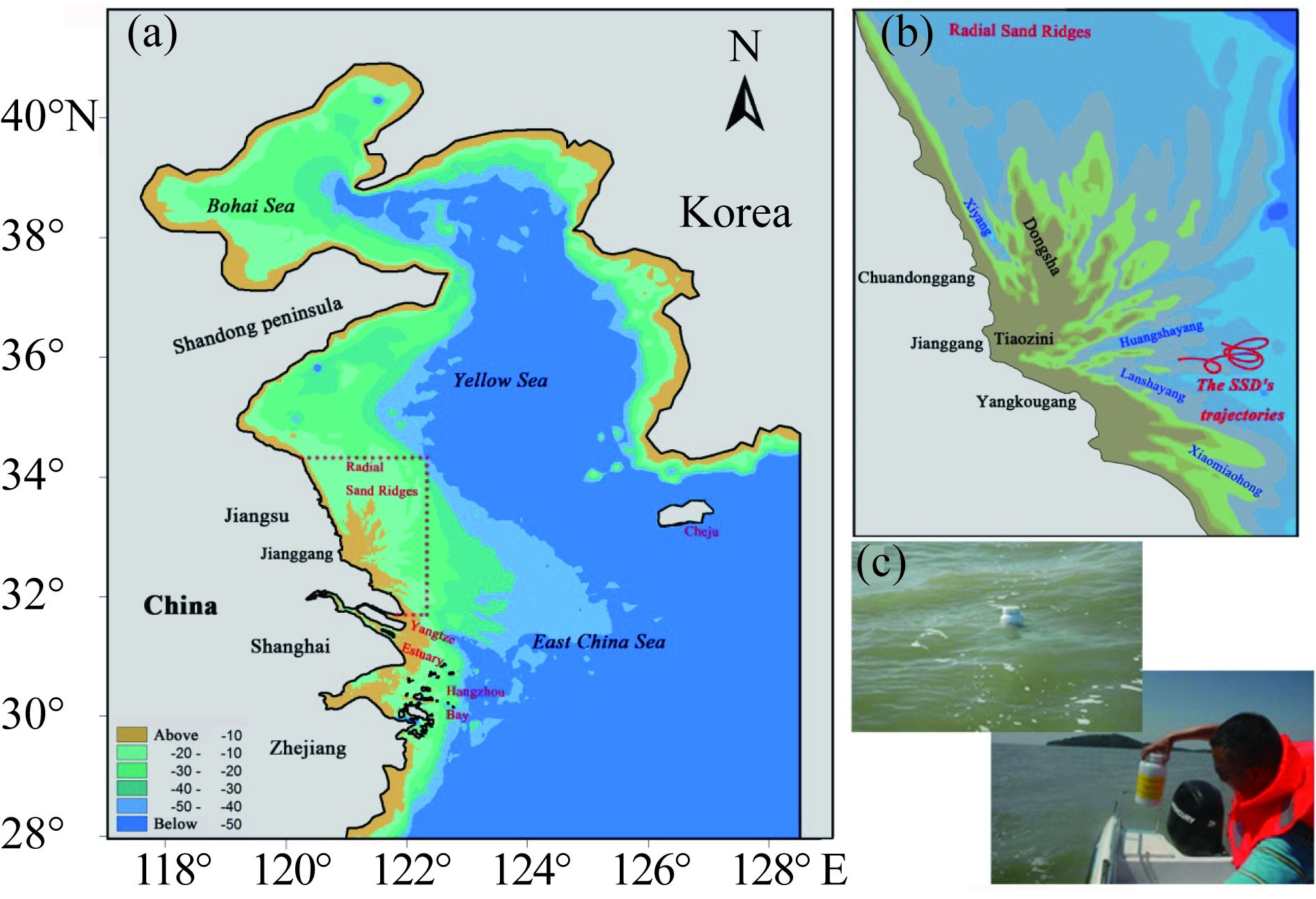
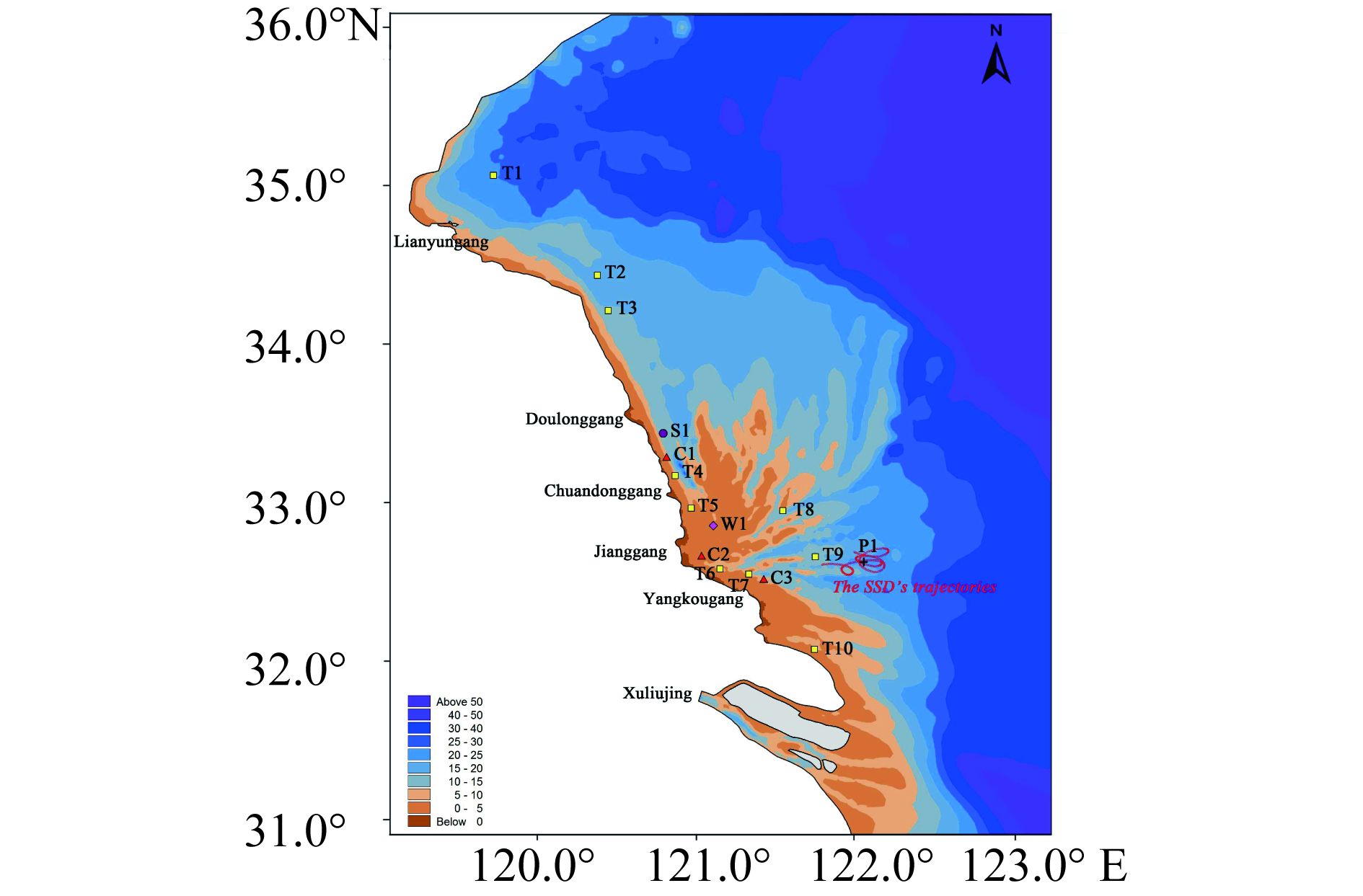
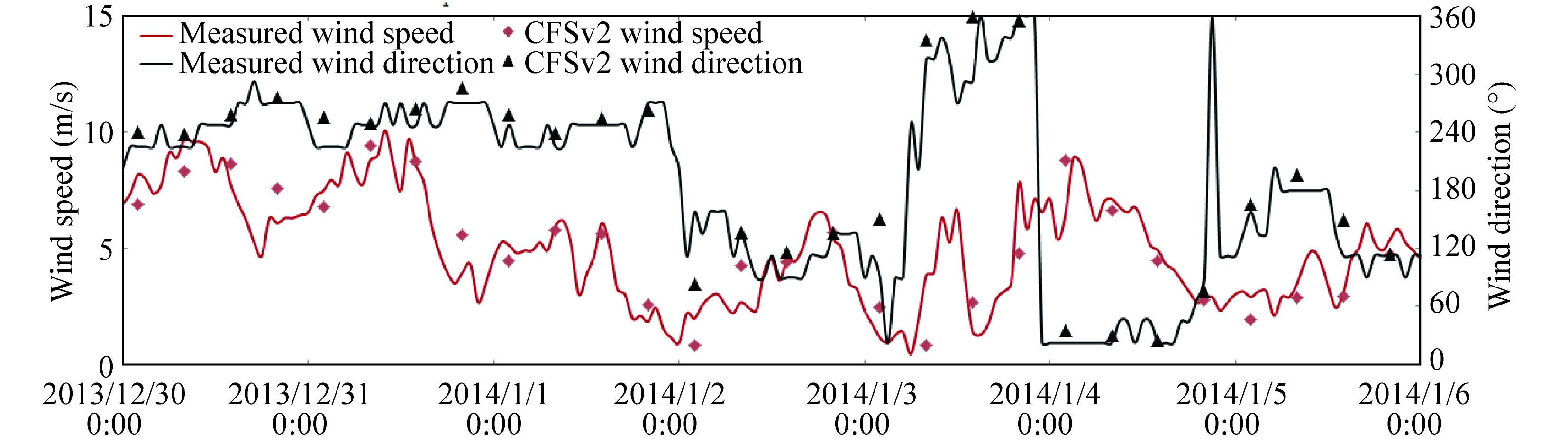
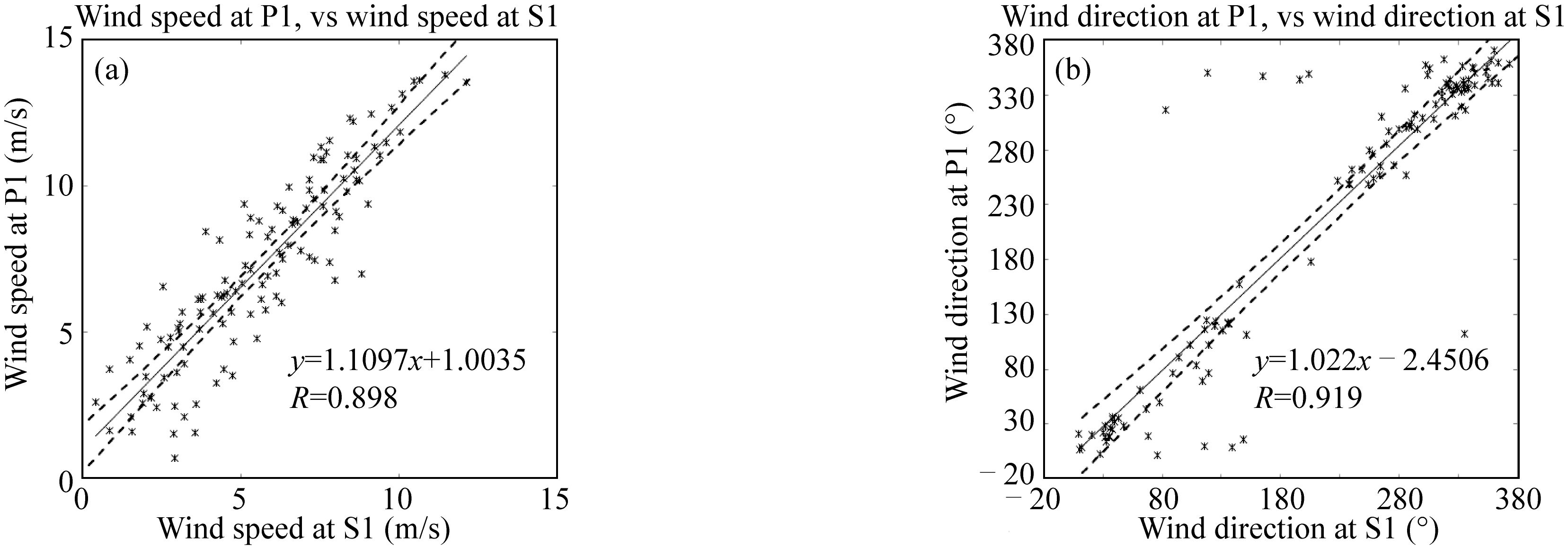
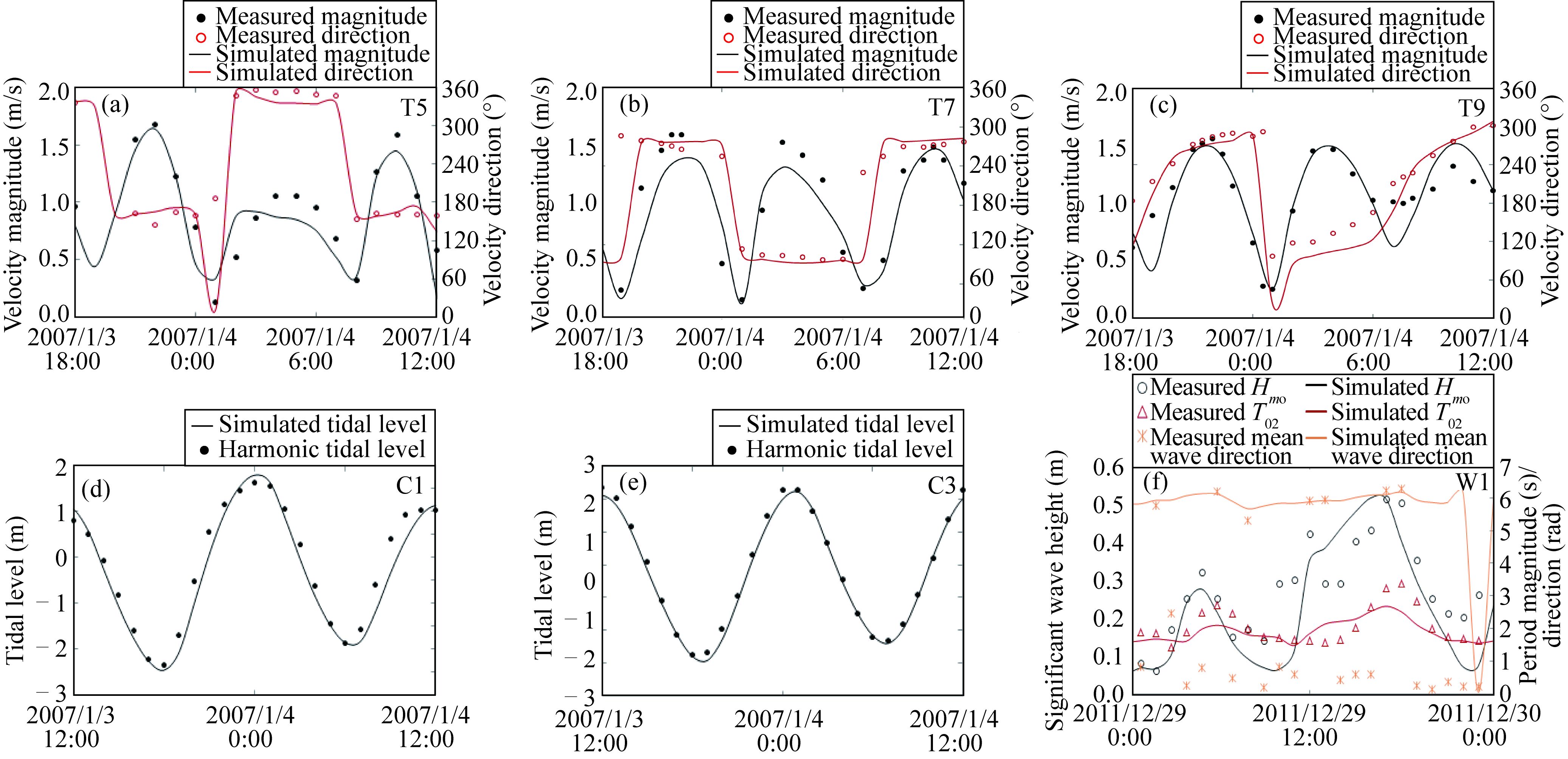
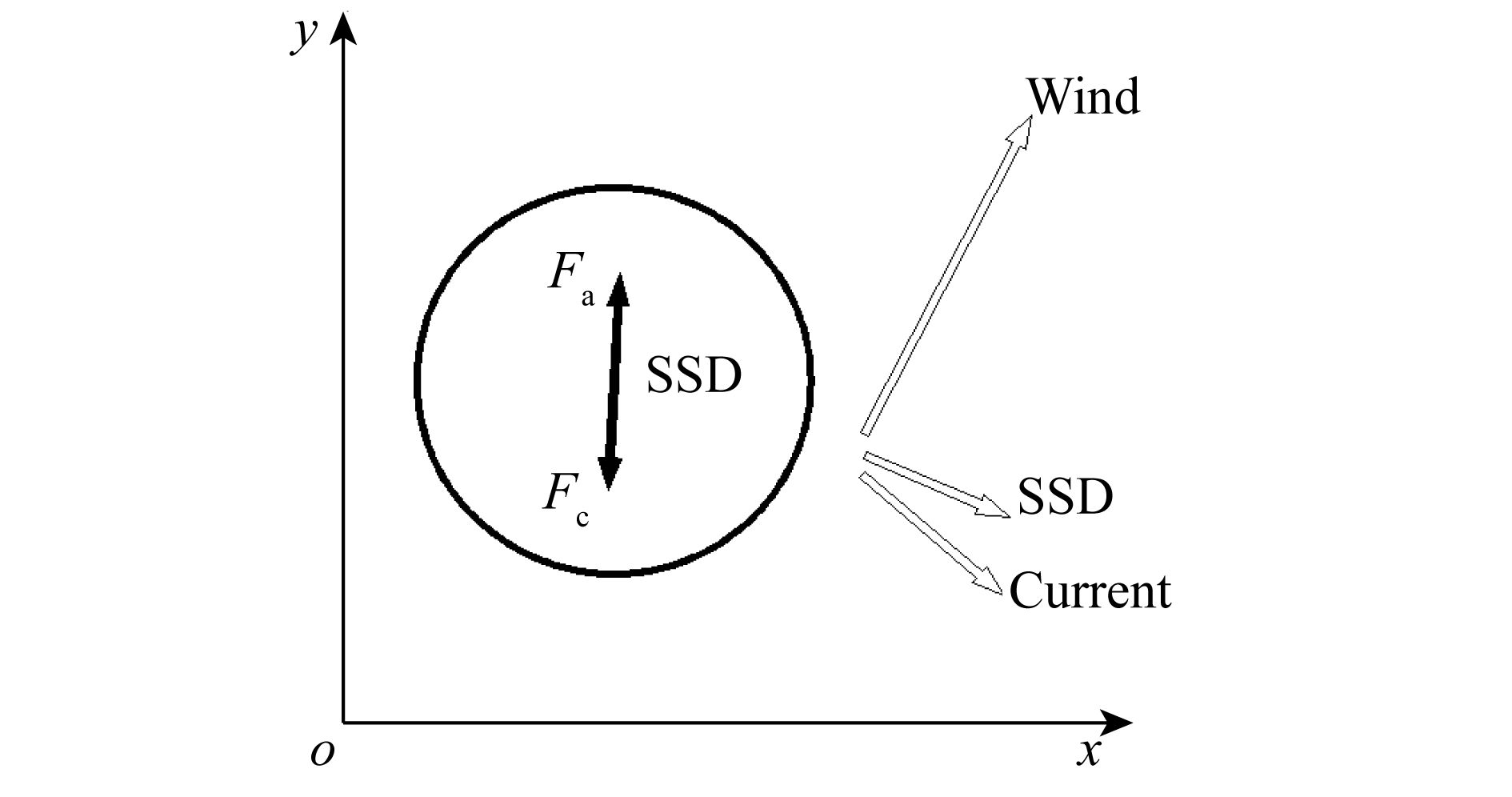
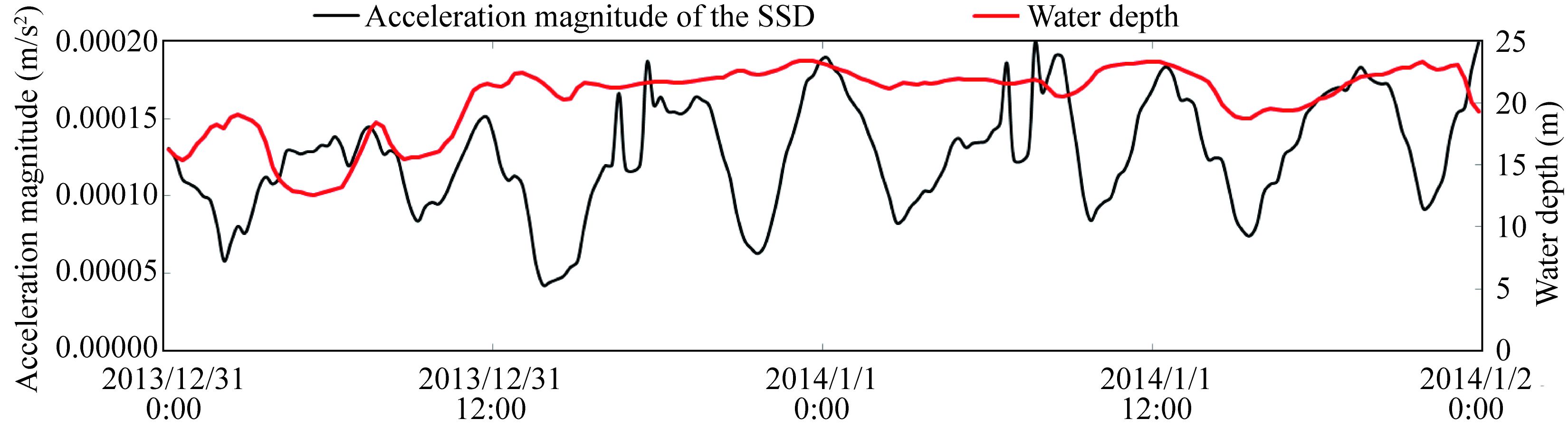
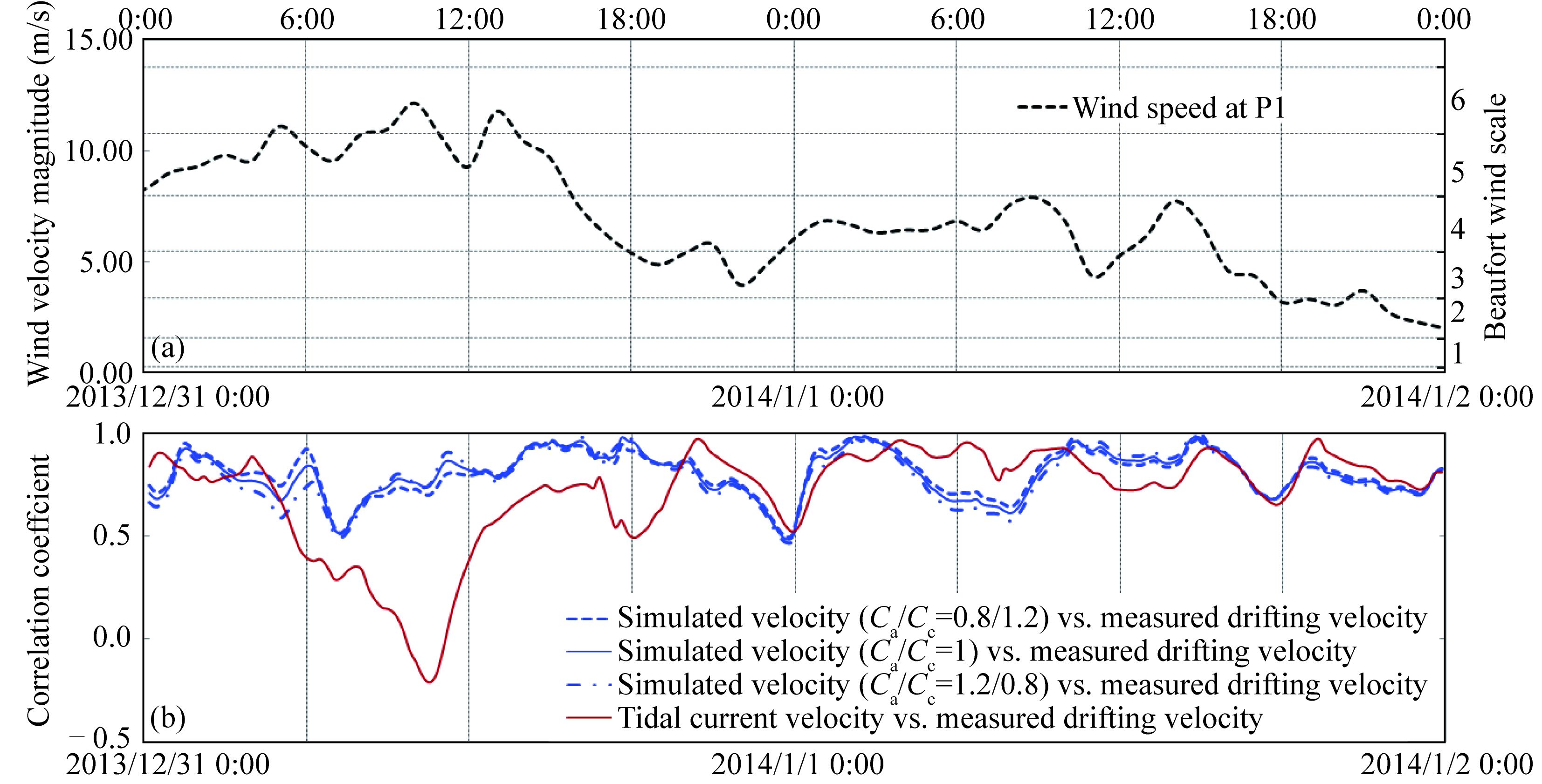
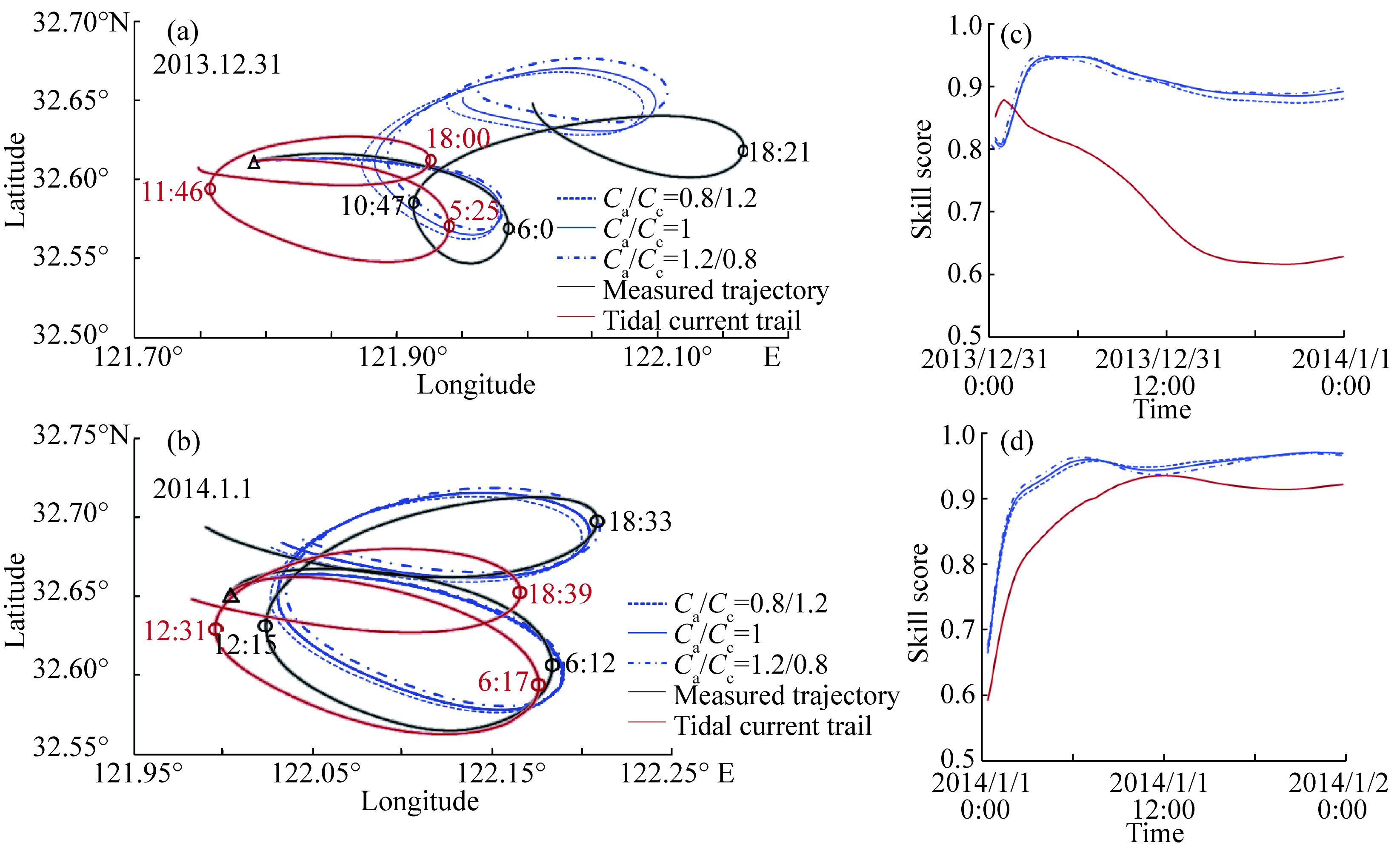
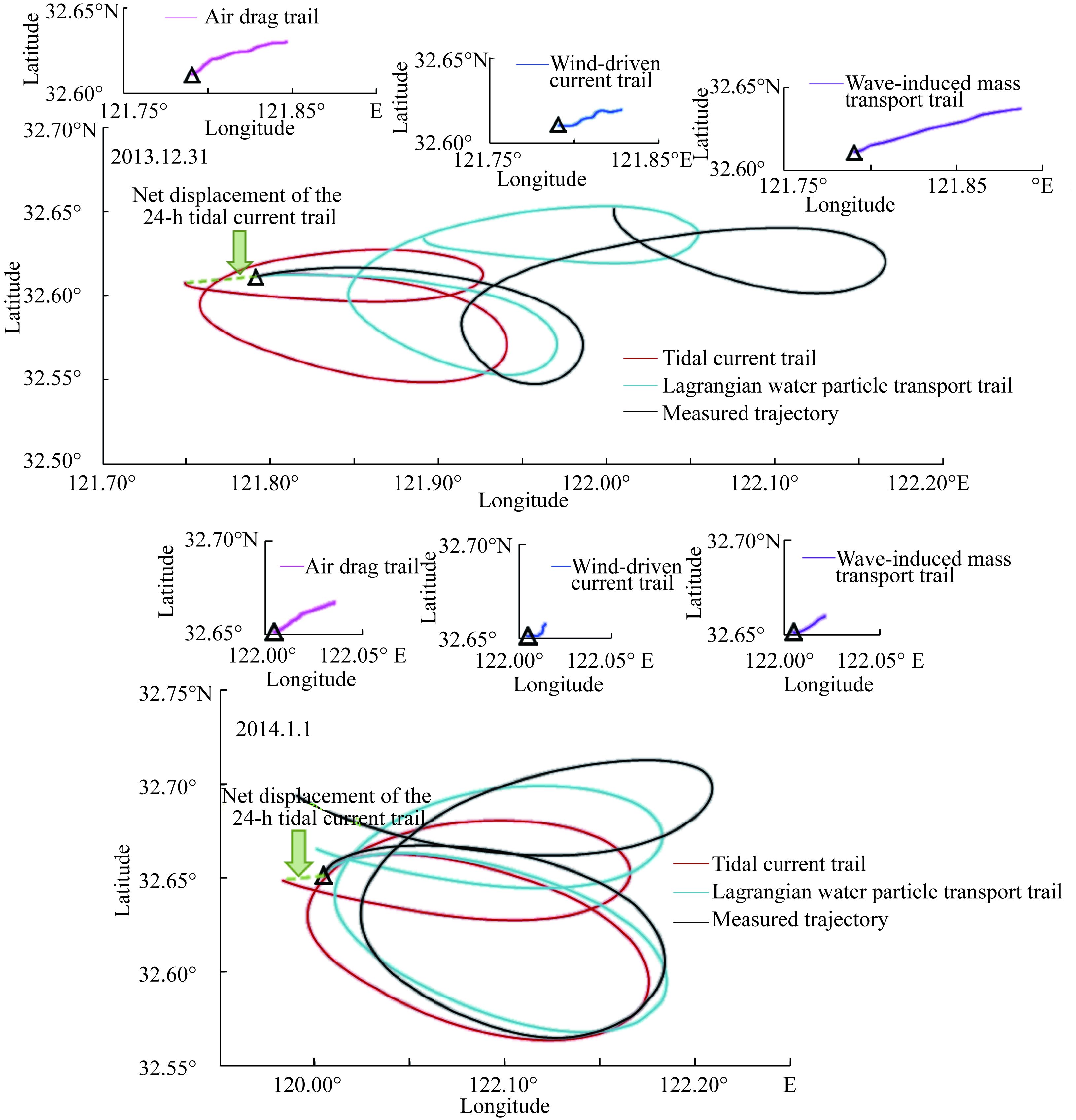
Understanding the drifting motion of a small semi-submersible drifter is of vital importance regarding monitoring surface currents and the floating pollutants in coastal regions. This work addresses this issue by establishing a mechanistic drifting forecast model based on kinetic analysis. Taking tide–wind–wave into consideration, the forecast model is validated against in situ drifting experiment in the Radial Sand Ridges. Model results show good performance with respect to the measured drifting features, characterized by migrating back and forth twice a day with daily downwind displacements. Trajectory models are used to evaluate the influence of the individual hydrodynamic forcing. The tidal current is the fundamental dynamic condition in the Radial Sand Ridges and has the greatest impact on the drifting distance. However, it loses its leading position in the field of the daily displacement of the used drifter. The simulations reveal that different hydrodynamic forces dominate the daily displacement of the used drifter at different wind scales. The wave-induced mass transport has the greatest influence on the daily displacement at Beaufort wind scale 5–6; while wind drag contributes mostly at wind scale 2–4.
Understanding the drifting motion of a small semi-submersible drifter is of vital importance regarding monitoring surface currents and the floating pollutants in coastal regions. This work addresses this issue by establishing a mechanistic drifting forecast model based on kinetic analysis. Taking tide–wind–wave into consideration, the forecast model is validated against in situ drifting experiment in the Radial Sand Ridges. Model results show good performance with respect to the measured drifting features, characterized by migrating back and forth twice a day with daily downwind displacements. Trajectory models are used to evaluate the influence of the individual hydrodynamic forcing. The tidal current is the fundamental dynamic condition in the Radial Sand Ridges and has the greatest impact on the drifting distance. However, it loses its leading position in the field of the daily displacement of the used drifter. The simulations reveal that different hydrodynamic forces dominate the daily displacement of the used drifter at different wind scales. The wave-induced mass transport has the greatest influence on the daily displacement at Beaufort wind scale 5–6; while wind drag contributes mostly at wind scale 2–4.
2018, 32(1): 110-116.
doi: 10.1007/s13344-018-0012-2
Abstract:
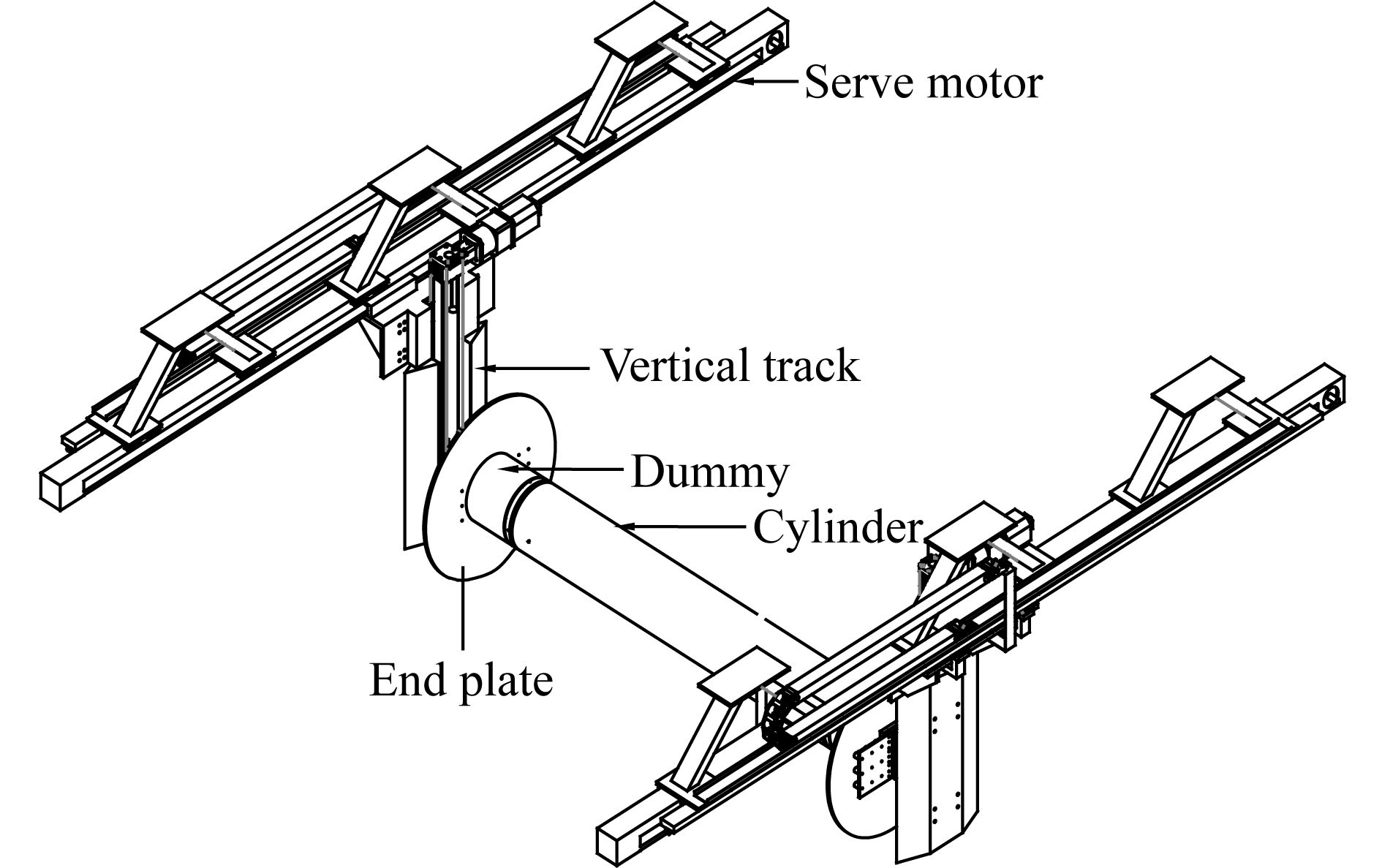
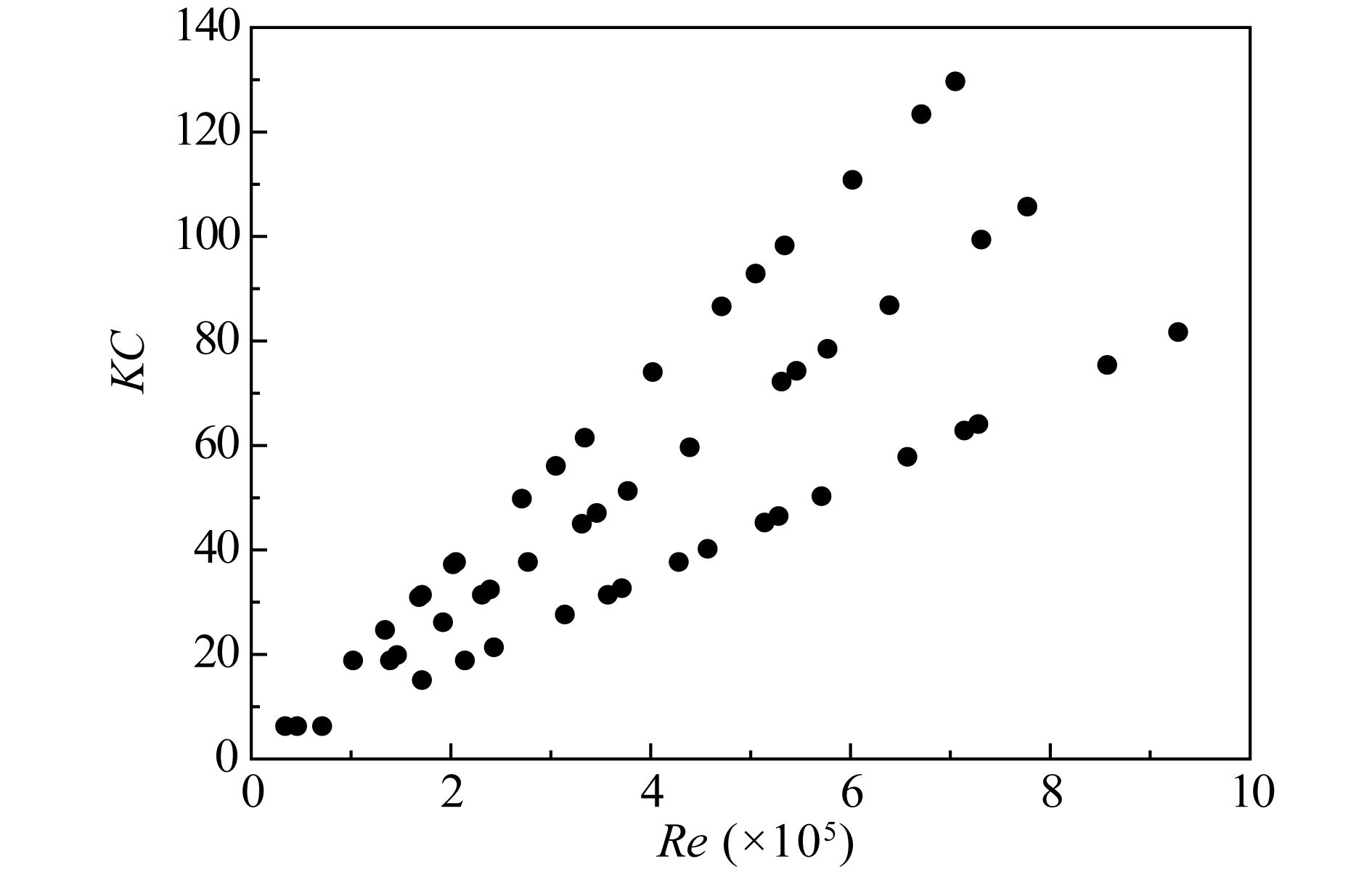
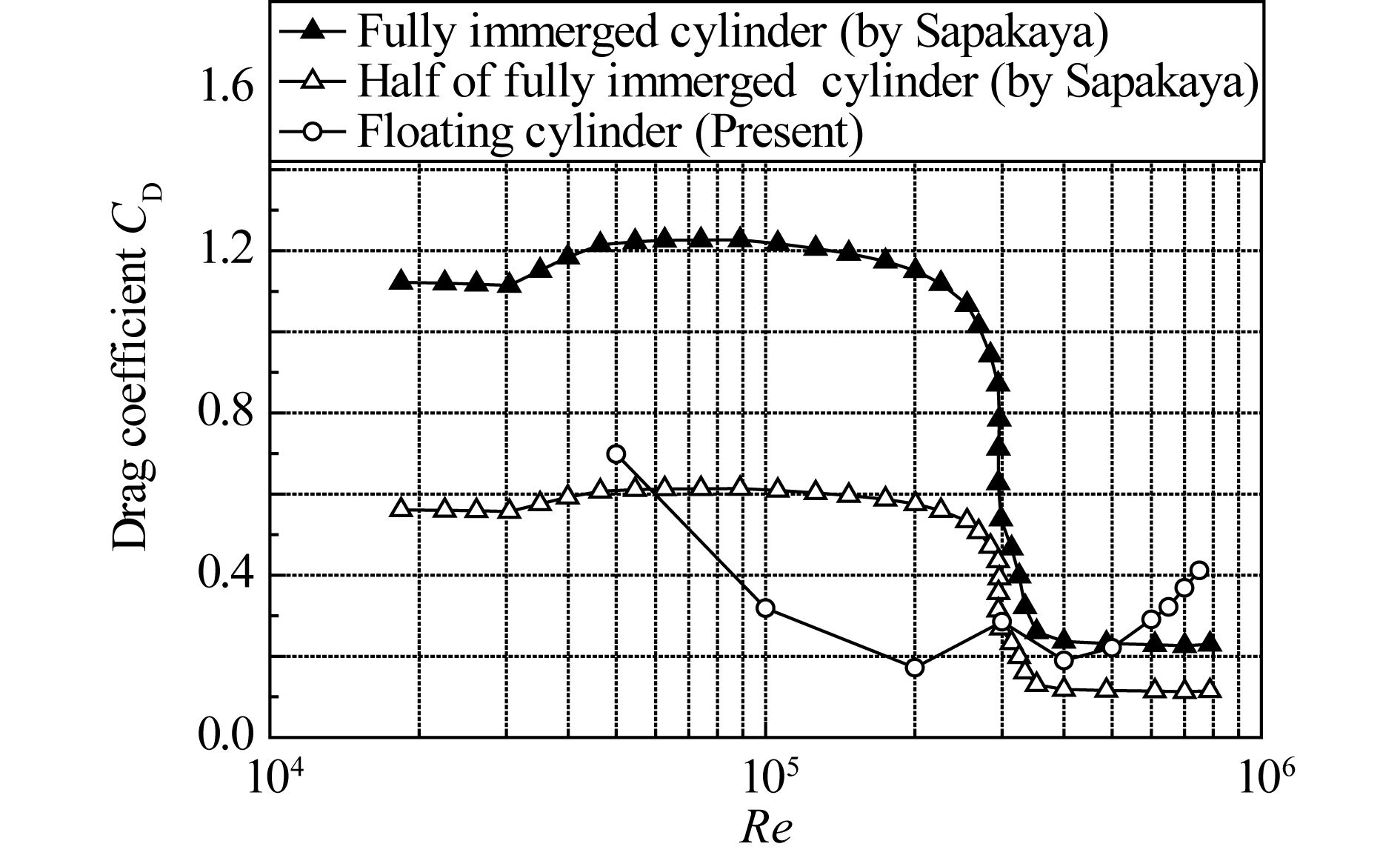
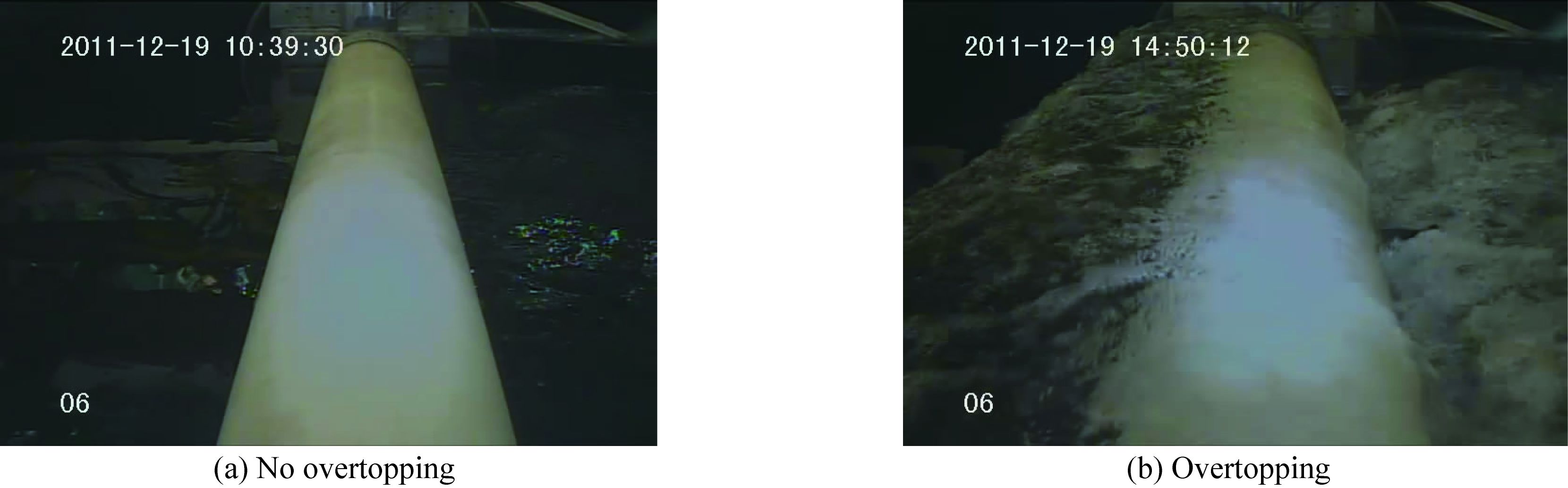
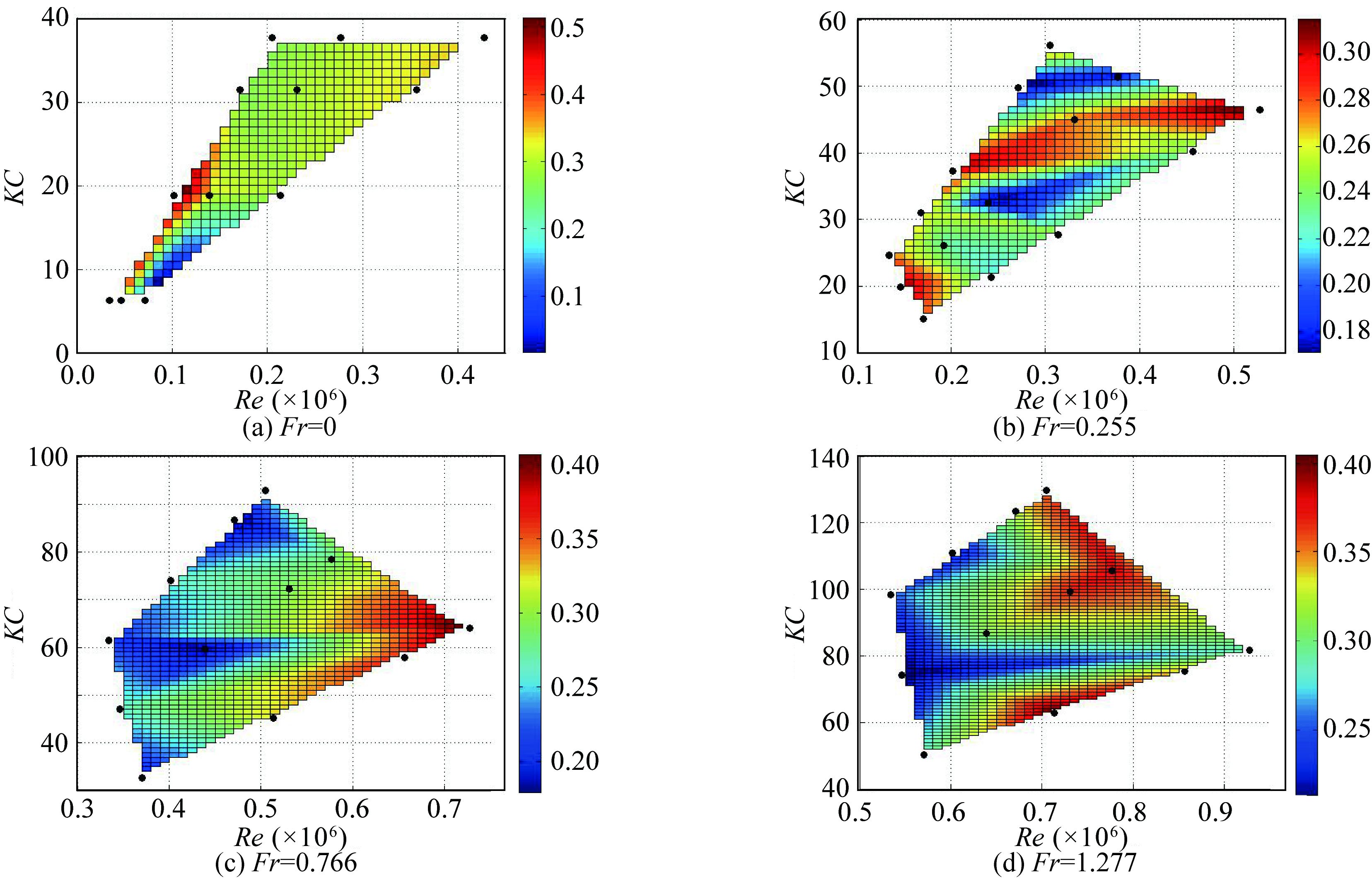
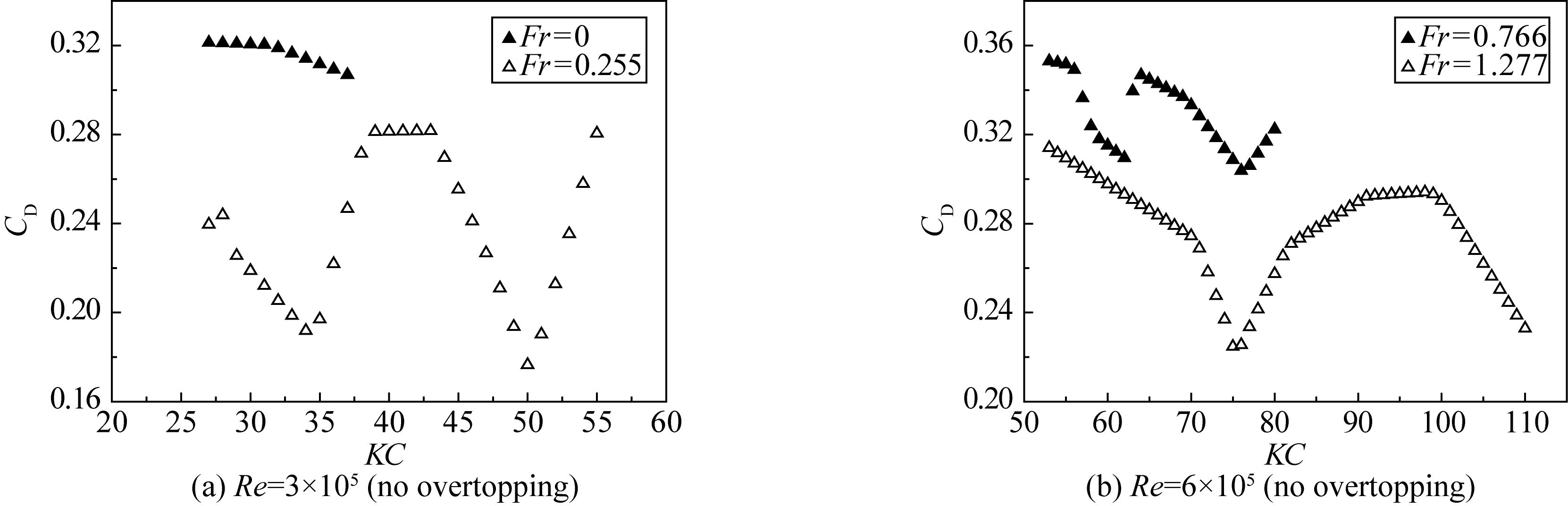
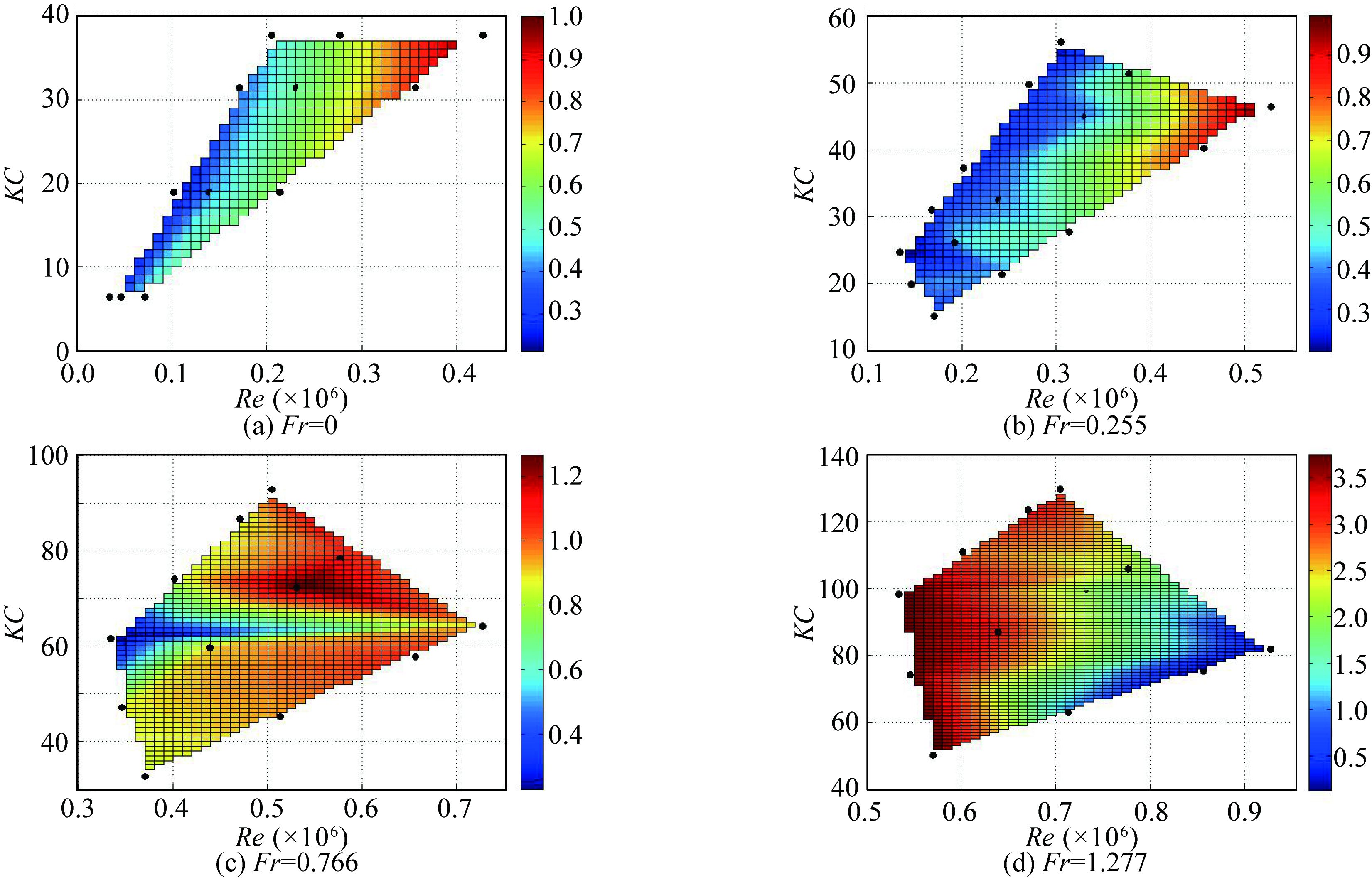
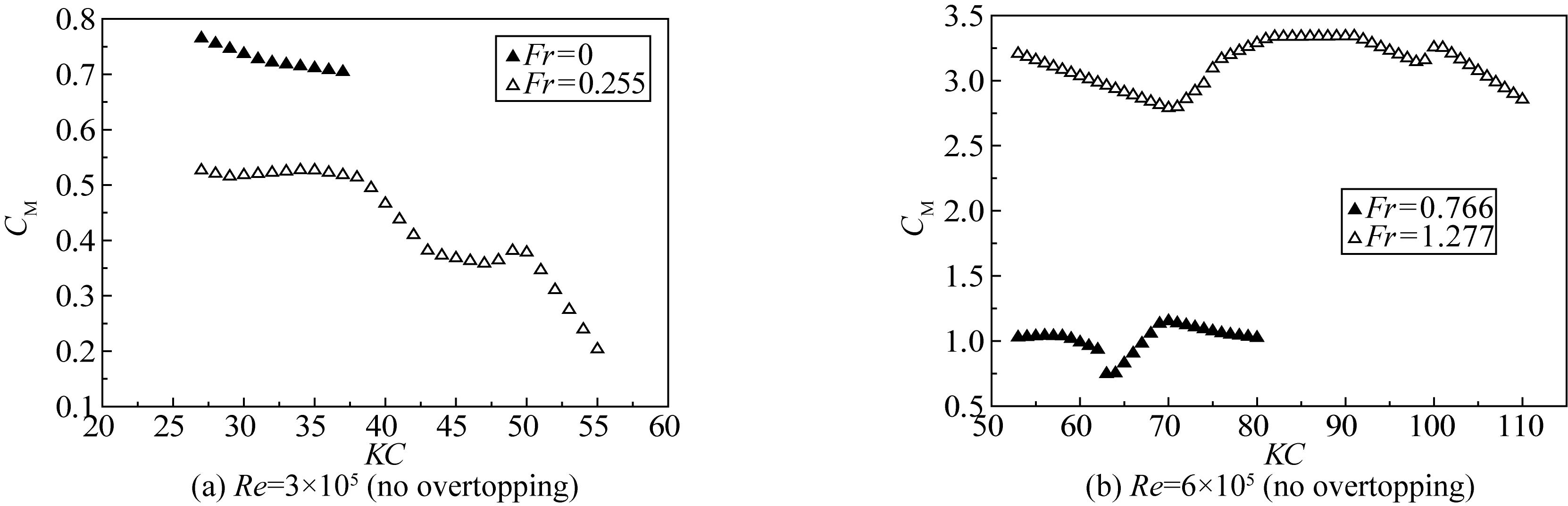
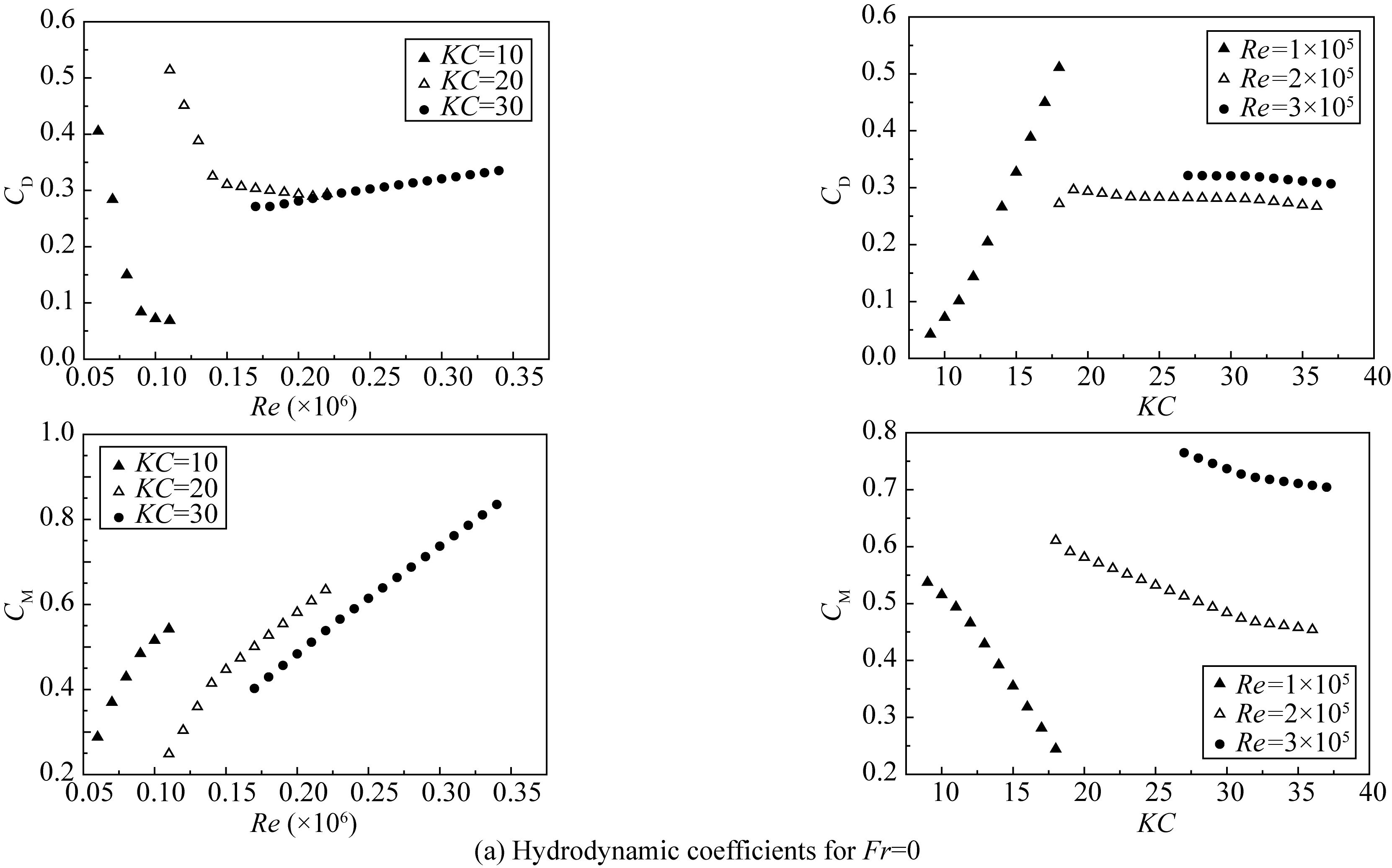
In this paper, the hydrodynamic coefficients of a horizontal semi-immersed cylinder in steady current and oscillatory flow combining with constant current are obtained via forced oscillation experiments in a towing tank. Three non-dimensional parameters (Re, KC and Fr) are introduced to investigate their effects on the hydrodynamic coefficients. The experimental results show that overtopping is evident and dominates when the Reynolds number exceeds 5×105 in the experiment. Under steady current condition, overtopping increases the drag coefficient significantly at high Reynolds numbers. Under oscillatory flow with constant current condition, the added mass coefficient can even reach a maximum value about 3.5 due to overtopping while the influence of overtopping on the drag coefficient is minor.
In this paper, the hydrodynamic coefficients of a horizontal semi-immersed cylinder in steady current and oscillatory flow combining with constant current are obtained via forced oscillation experiments in a towing tank. Three non-dimensional parameters (Re, KC and Fr) are introduced to investigate their effects on the hydrodynamic coefficients. The experimental results show that overtopping is evident and dominates when the Reynolds number exceeds 5×105 in the experiment. Under steady current condition, overtopping increases the drag coefficient significantly at high Reynolds numbers. Under oscillatory flow with constant current condition, the added mass coefficient can even reach a maximum value about 3.5 due to overtopping while the influence of overtopping on the drag coefficient is minor.
2018, 32(1): 117-122.
doi: 10.1007/s13344-018-0013-1
Abstract:
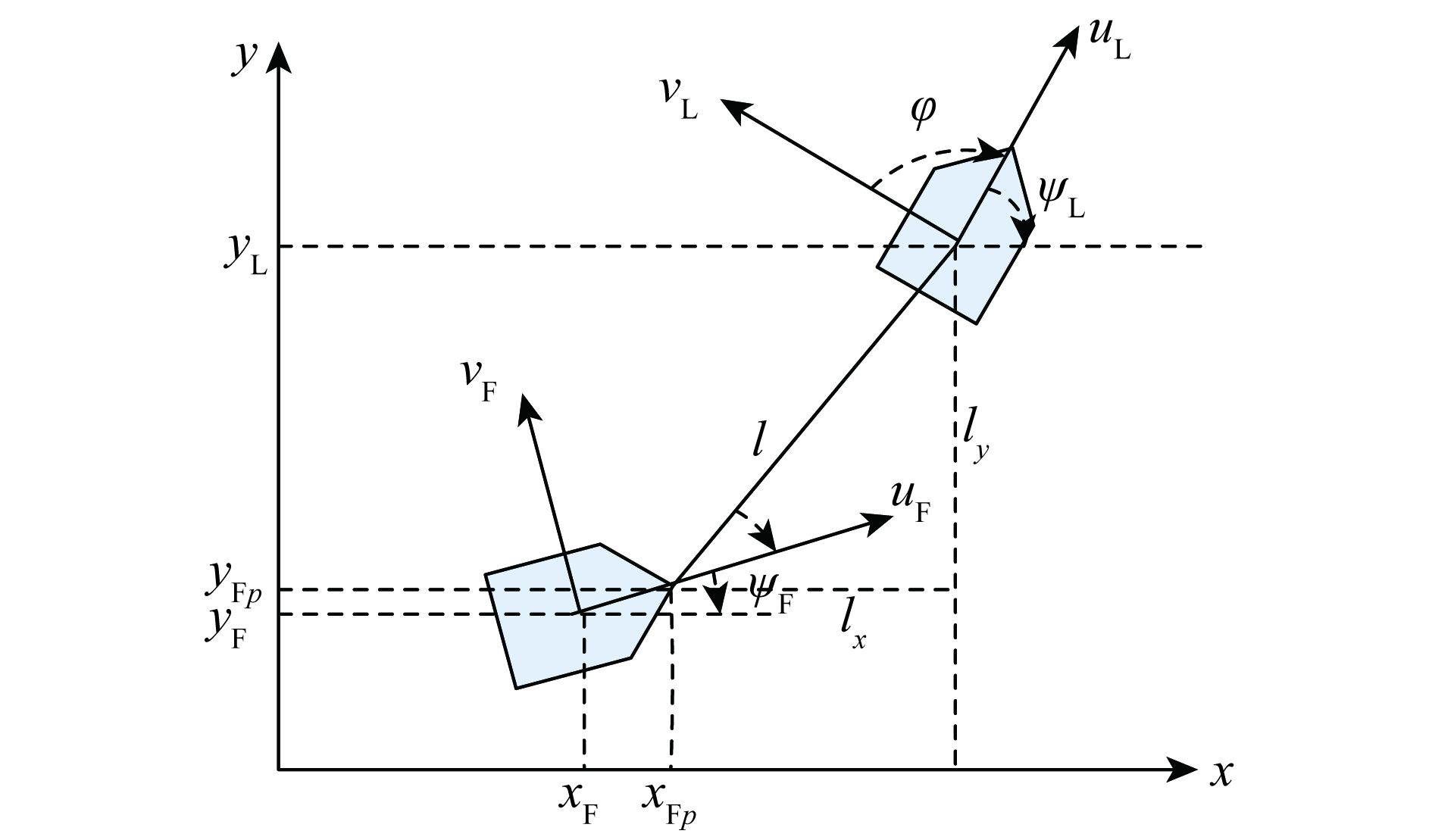
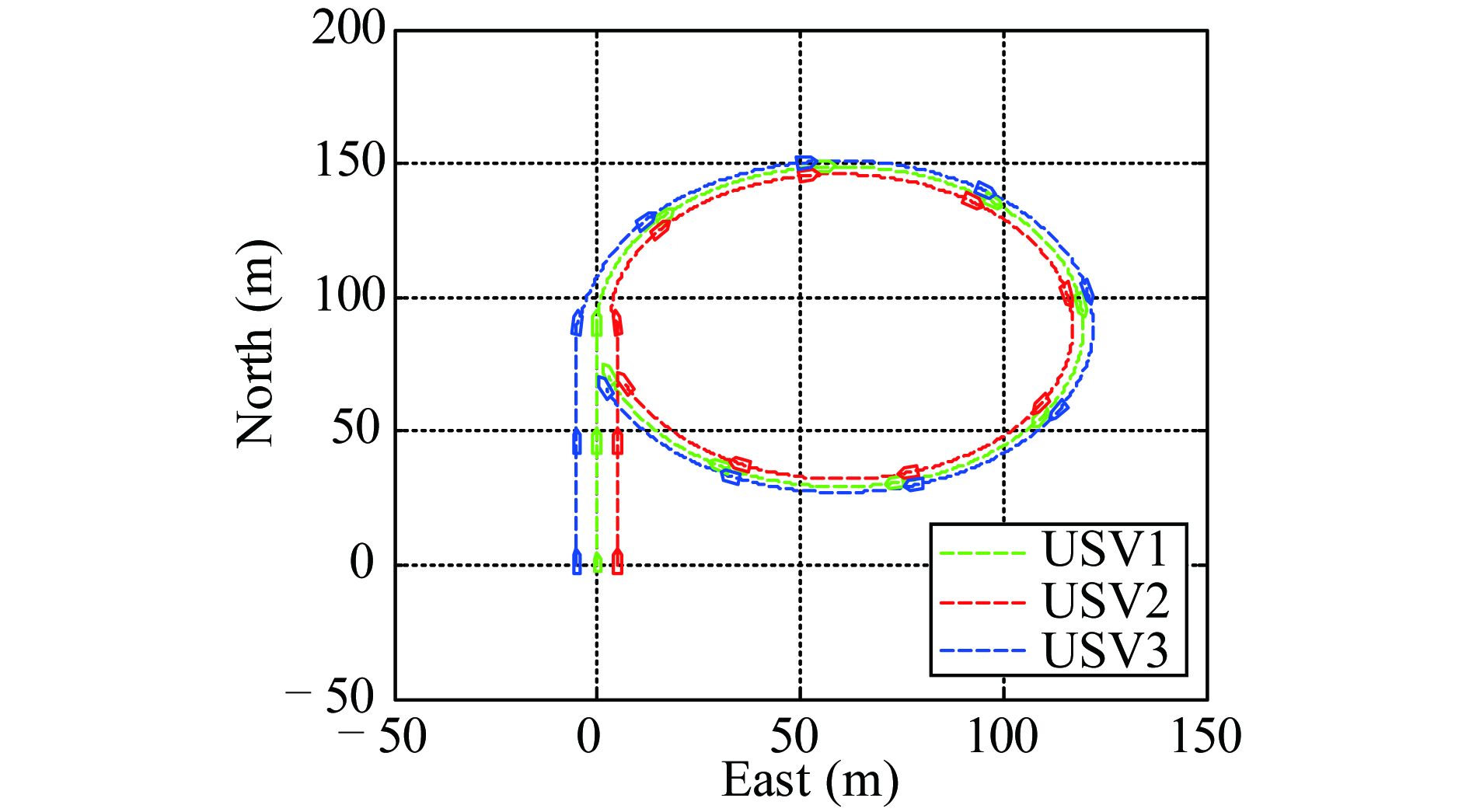
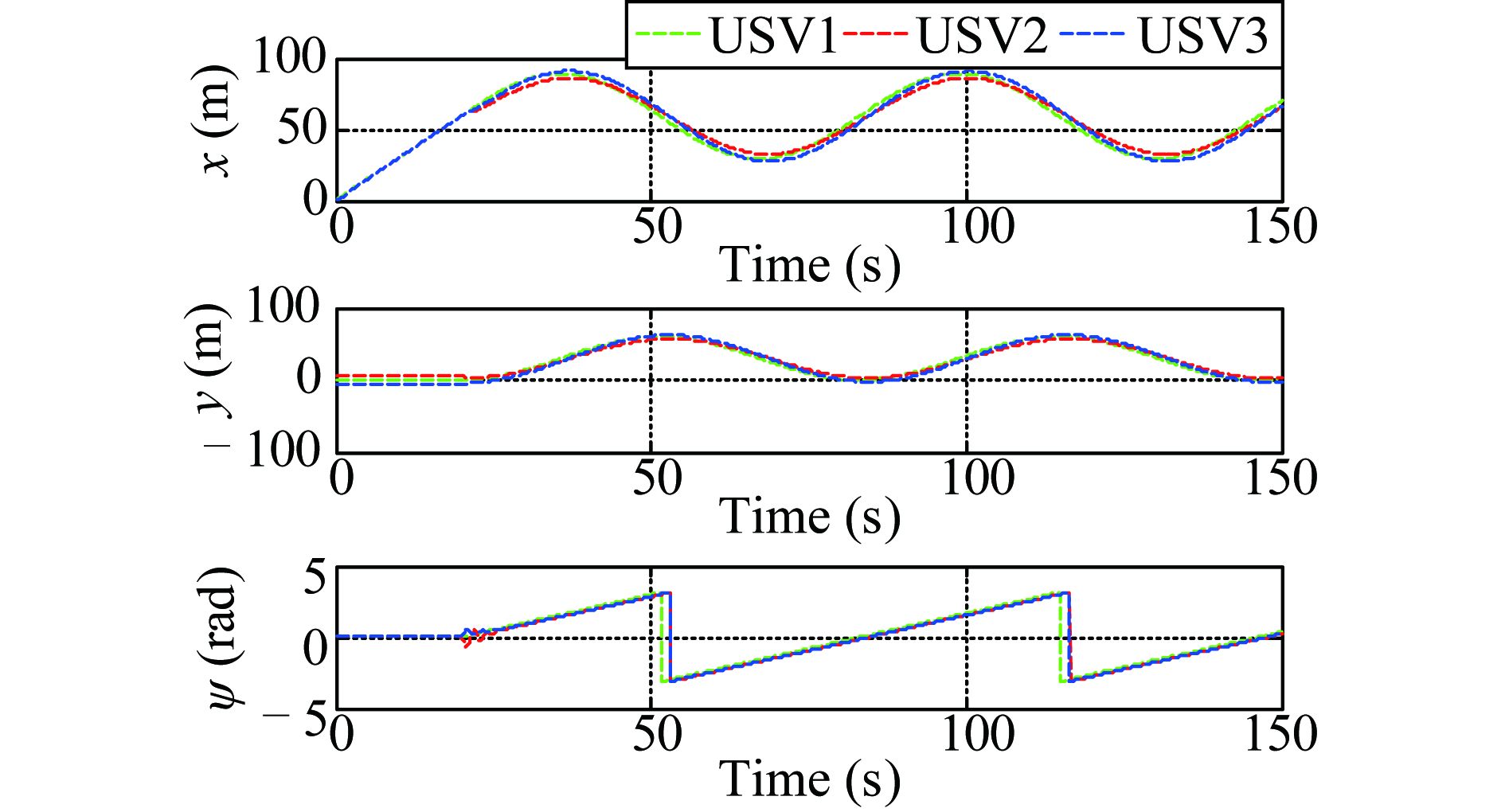
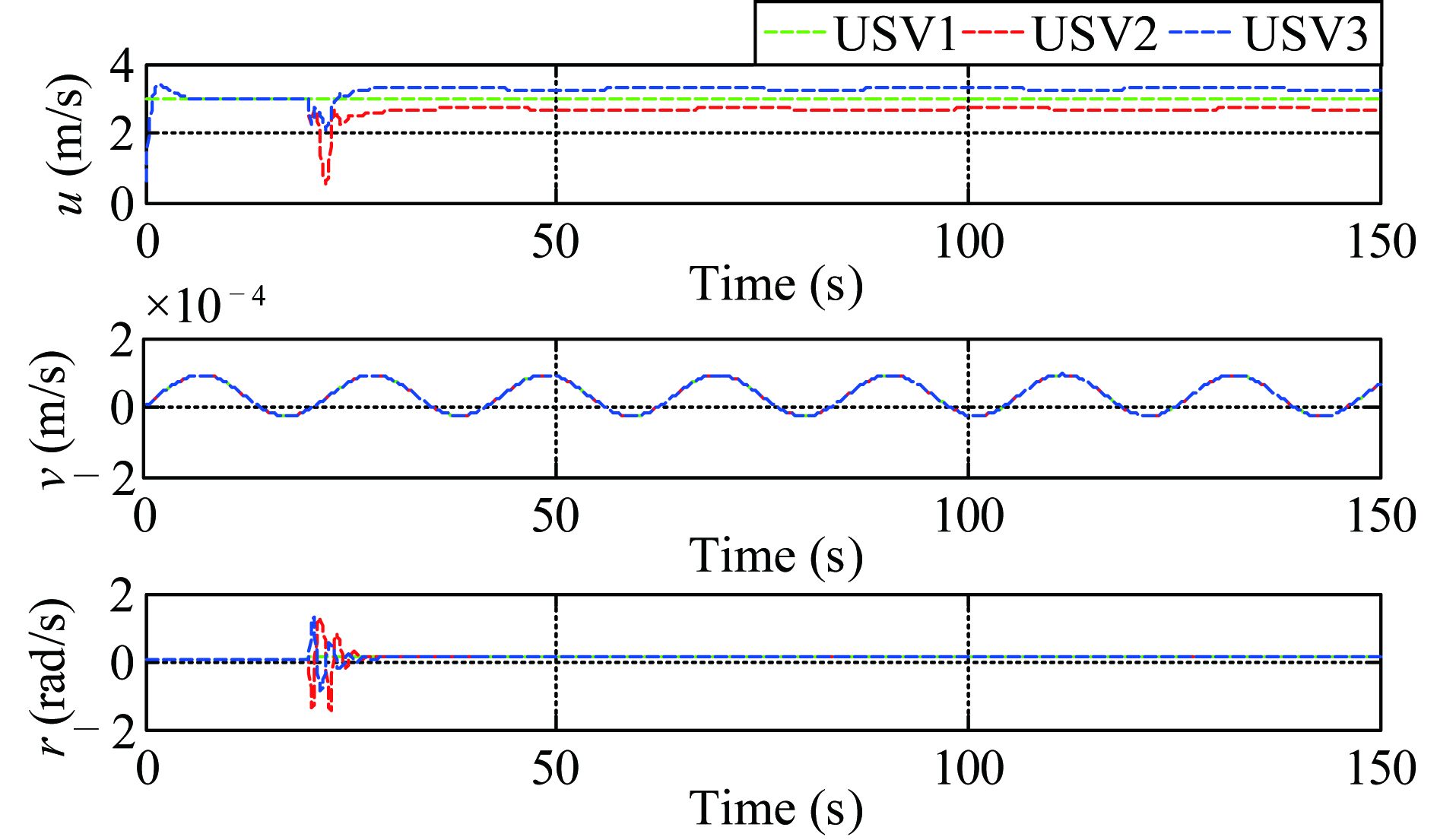
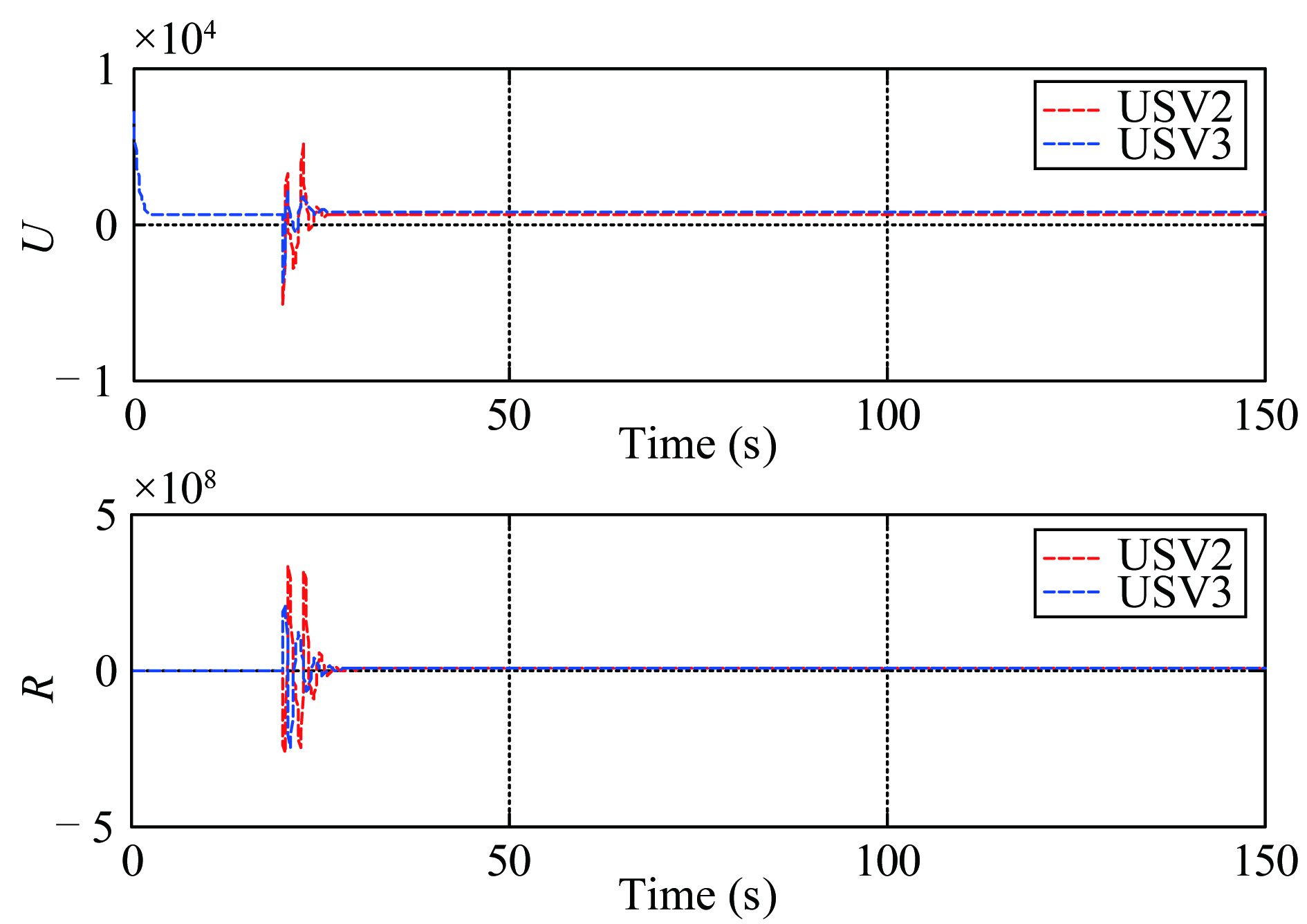
The formation control problem for underactuated unmanned surface vehicles (USVs) is addressed by a distributed strategy based on virtual leader strategy. The control system takes account of disturbance induced by external environment. With the coordinate transformation, the advantage of the proposed scheme is that the control point can be any point of the ship instead of the center of gravity. By introducing bio-inspired model, the formation control problem is addressed with backstepping method. This avoids complicated computation, simplifies the control law, and smoothes the input signals. The system uniform ultimate boundness is proven by Lyapunov stability theory with Young inequality. Simulation results are presented to verify the effectiveness and robust of the proposed controller.
The formation control problem for underactuated unmanned surface vehicles (USVs) is addressed by a distributed strategy based on virtual leader strategy. The control system takes account of disturbance induced by external environment. With the coordinate transformation, the advantage of the proposed scheme is that the control point can be any point of the ship instead of the center of gravity. By introducing bio-inspired model, the formation control problem is addressed with backstepping method. This avoids complicated computation, simplifies the control law, and smoothes the input signals. The system uniform ultimate boundness is proven by Lyapunov stability theory with Young inequality. Simulation results are presented to verify the effectiveness and robust of the proposed controller.
ScholarOne Manuscripts Log In
Current Issue
- Volume 40
- Issue 1
- February 2026
- Editor-in-Chief:
- Superintended by:
CHINA ASSOCIATION FOR SCIENCE AND TECHNOLOGY
- Sponsored by:
Chinese Ocean Engineering Society (COES)
- Edited by:
Nanjing Hydraulic Research Institute
Highlights
Stay up to Date
 Article abstracts by RSS
Article abstracts by RSS E-mail Alerts
E-mail Alerts