
2019 Vol.33(3)
Display Mode: |
2019, 33(3): 253-267.
doi: 10.1007/s13344-019-0025-5
Abstract:
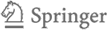
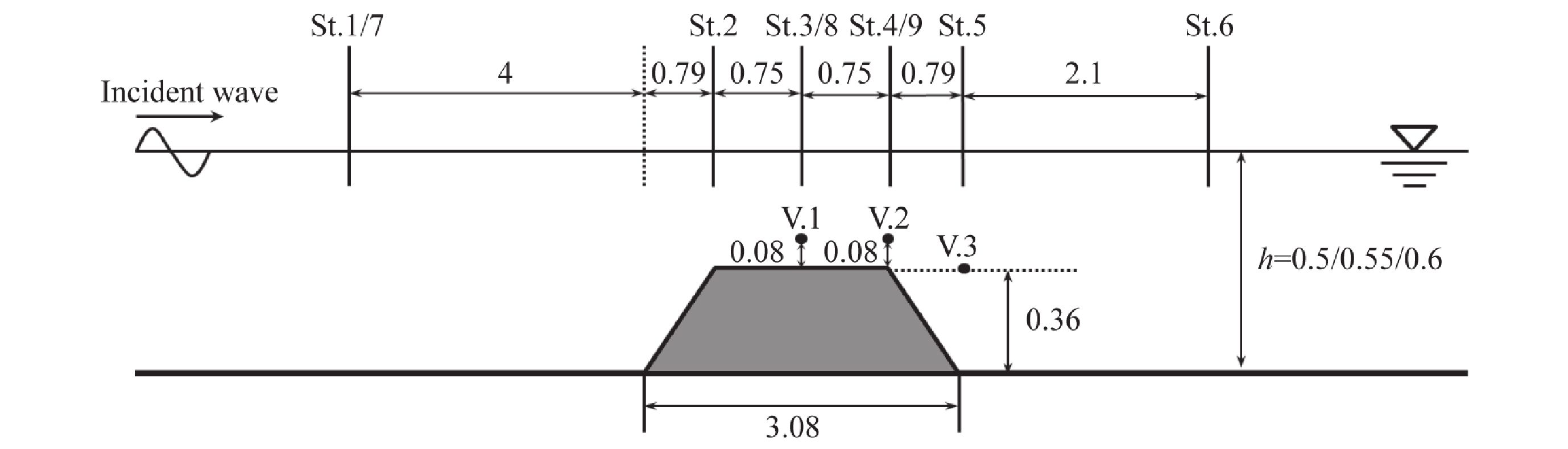
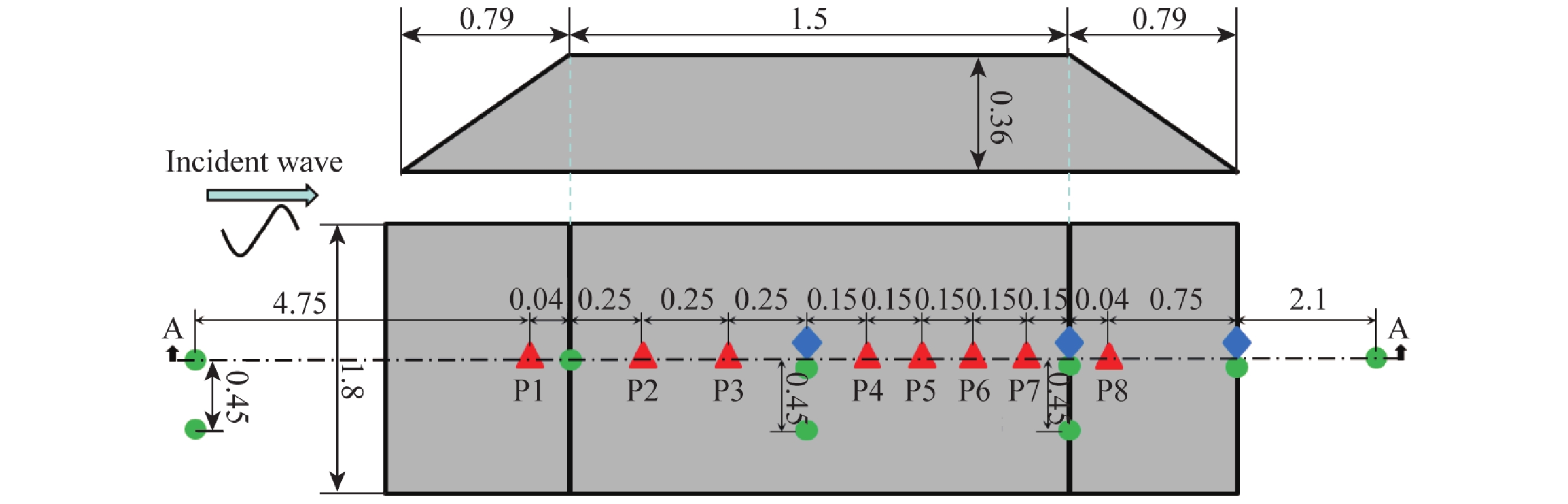
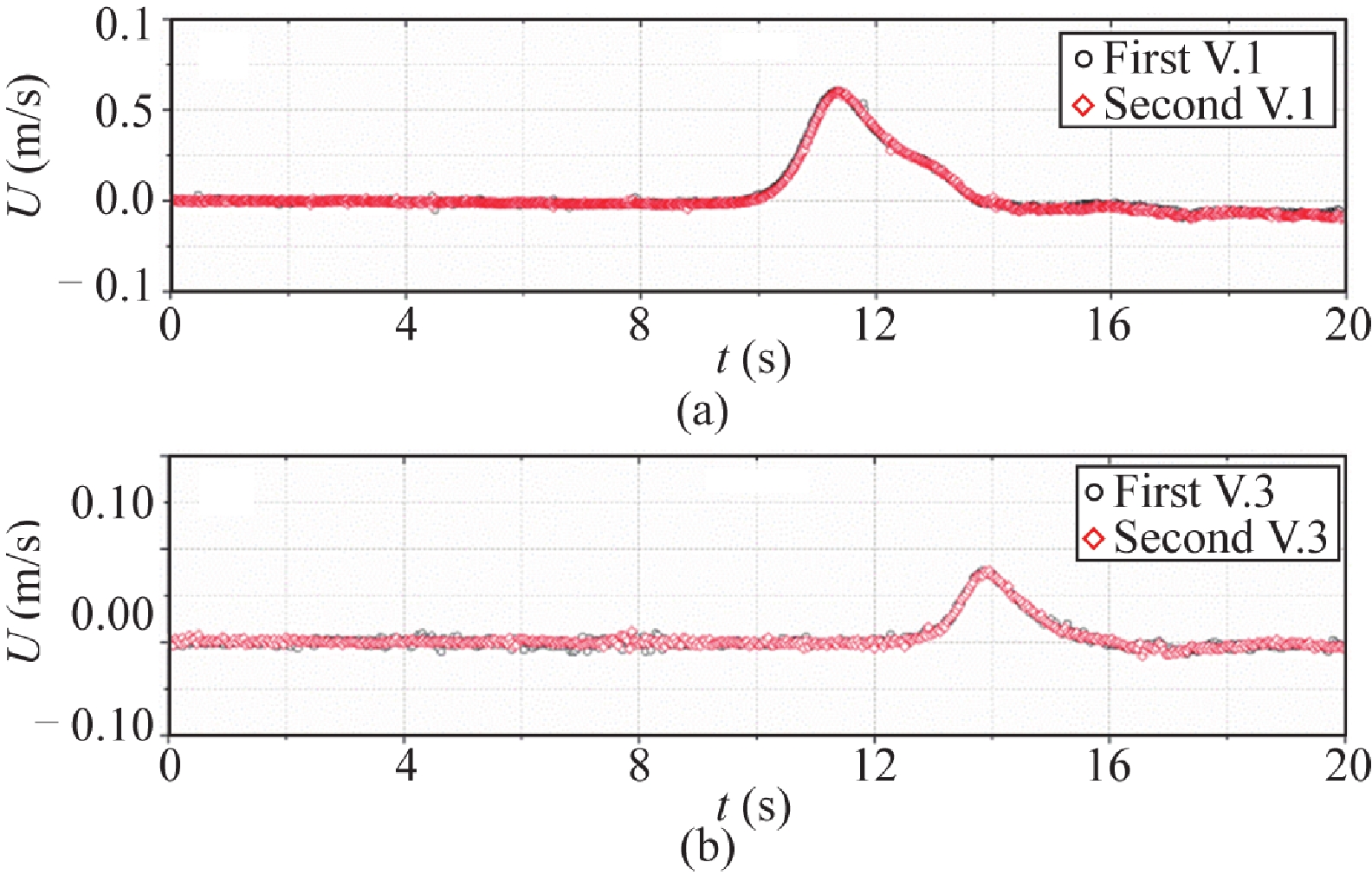
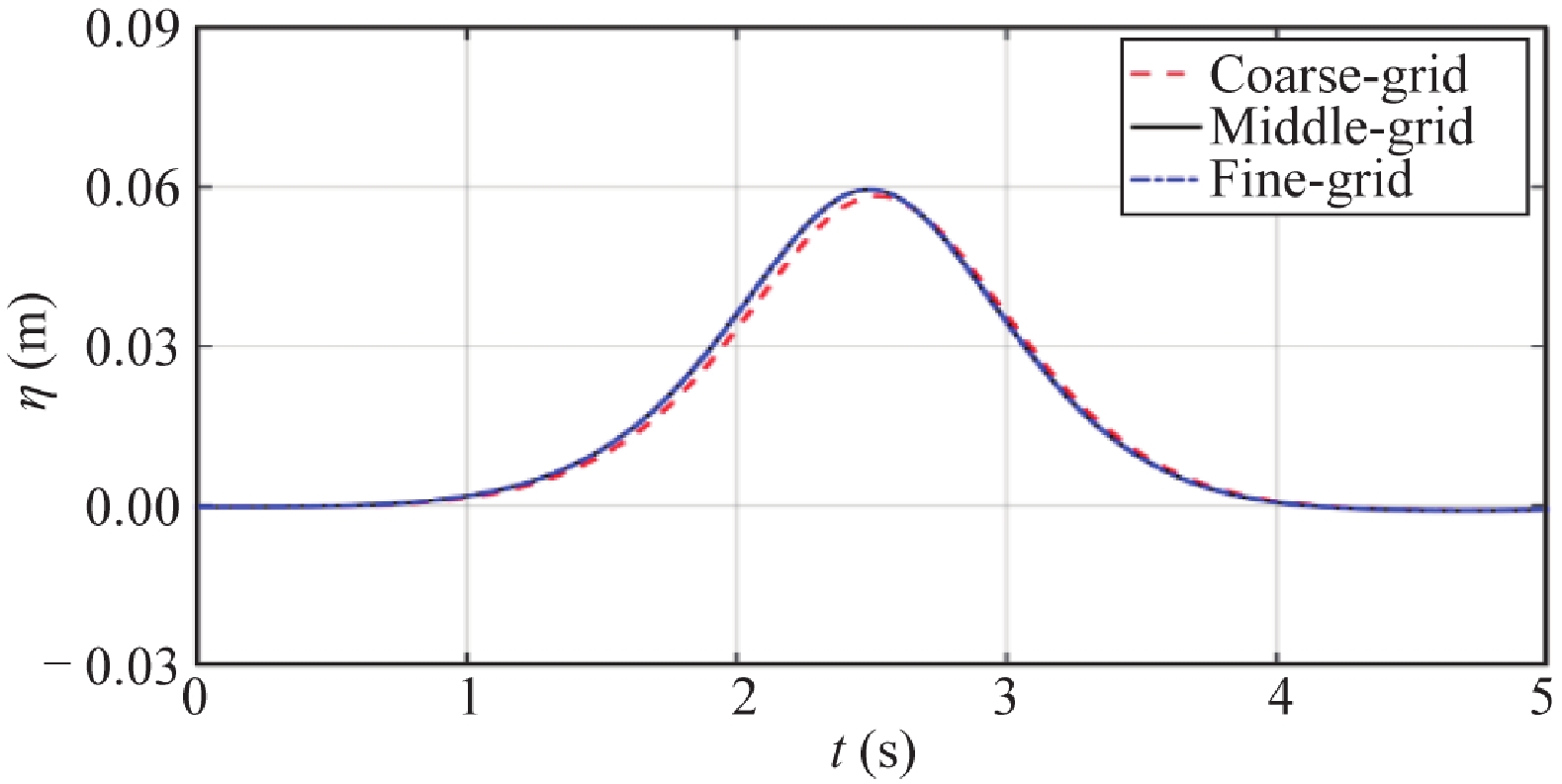
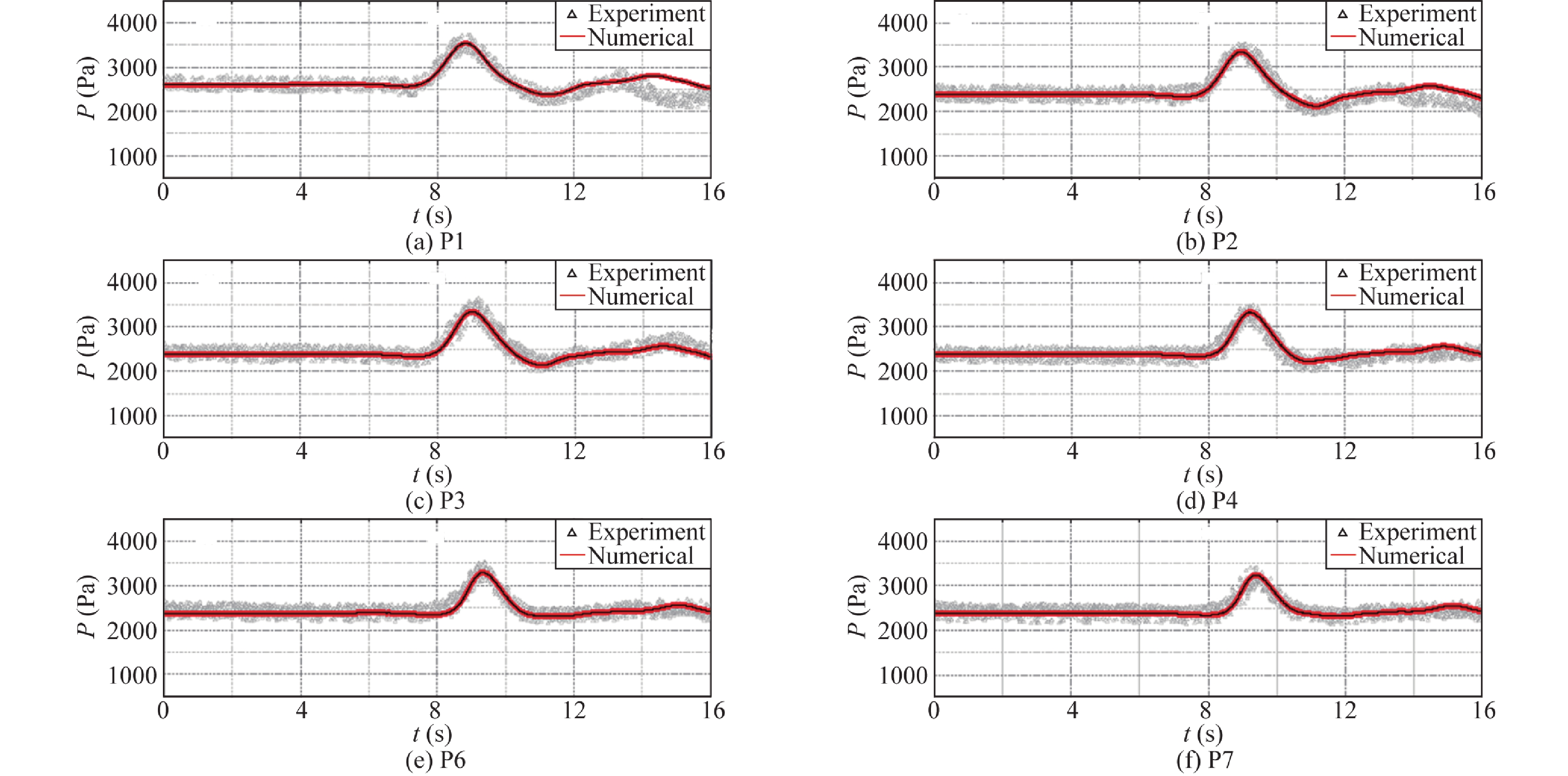
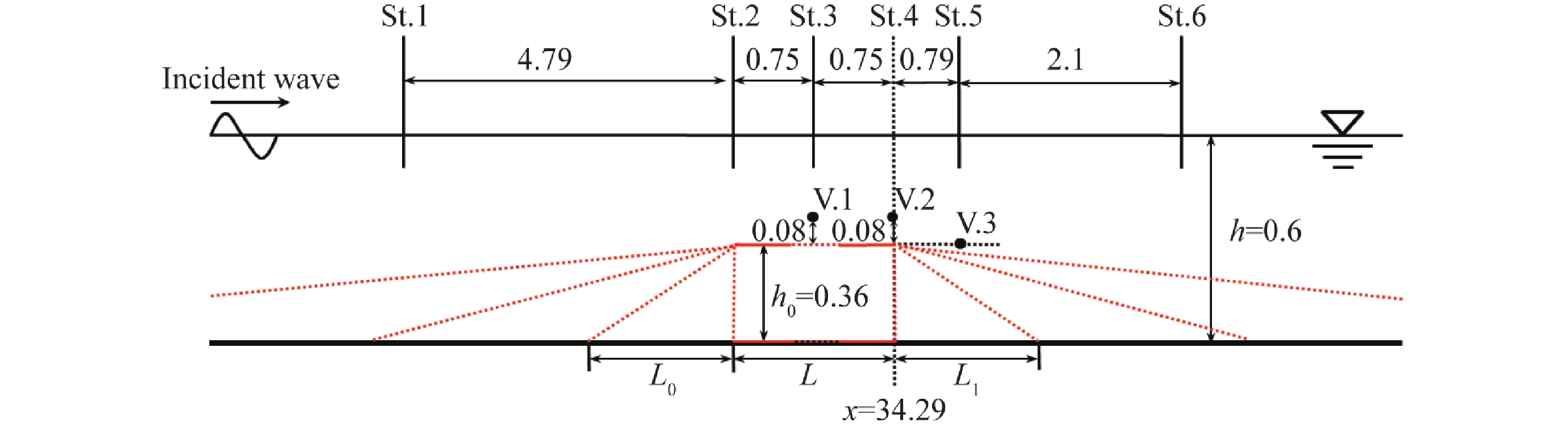
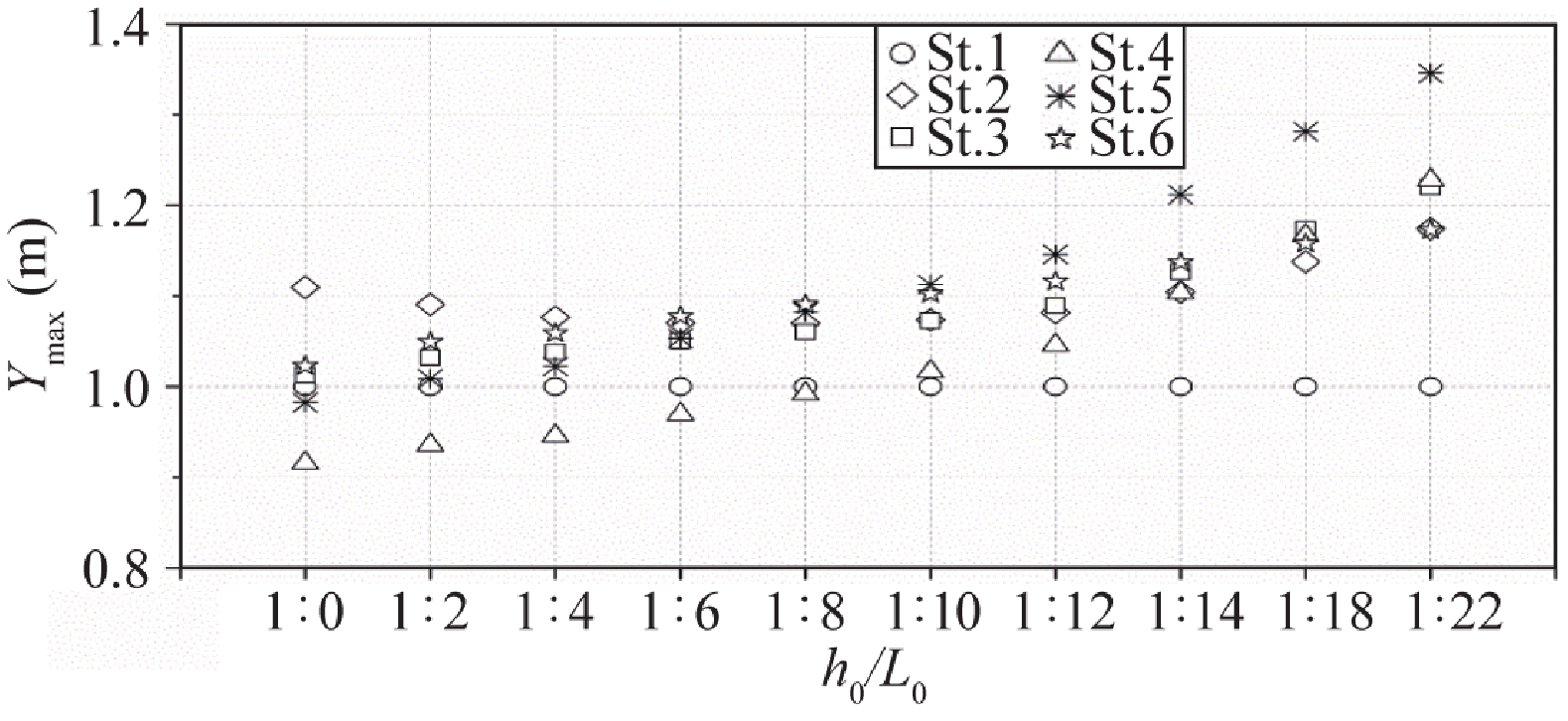
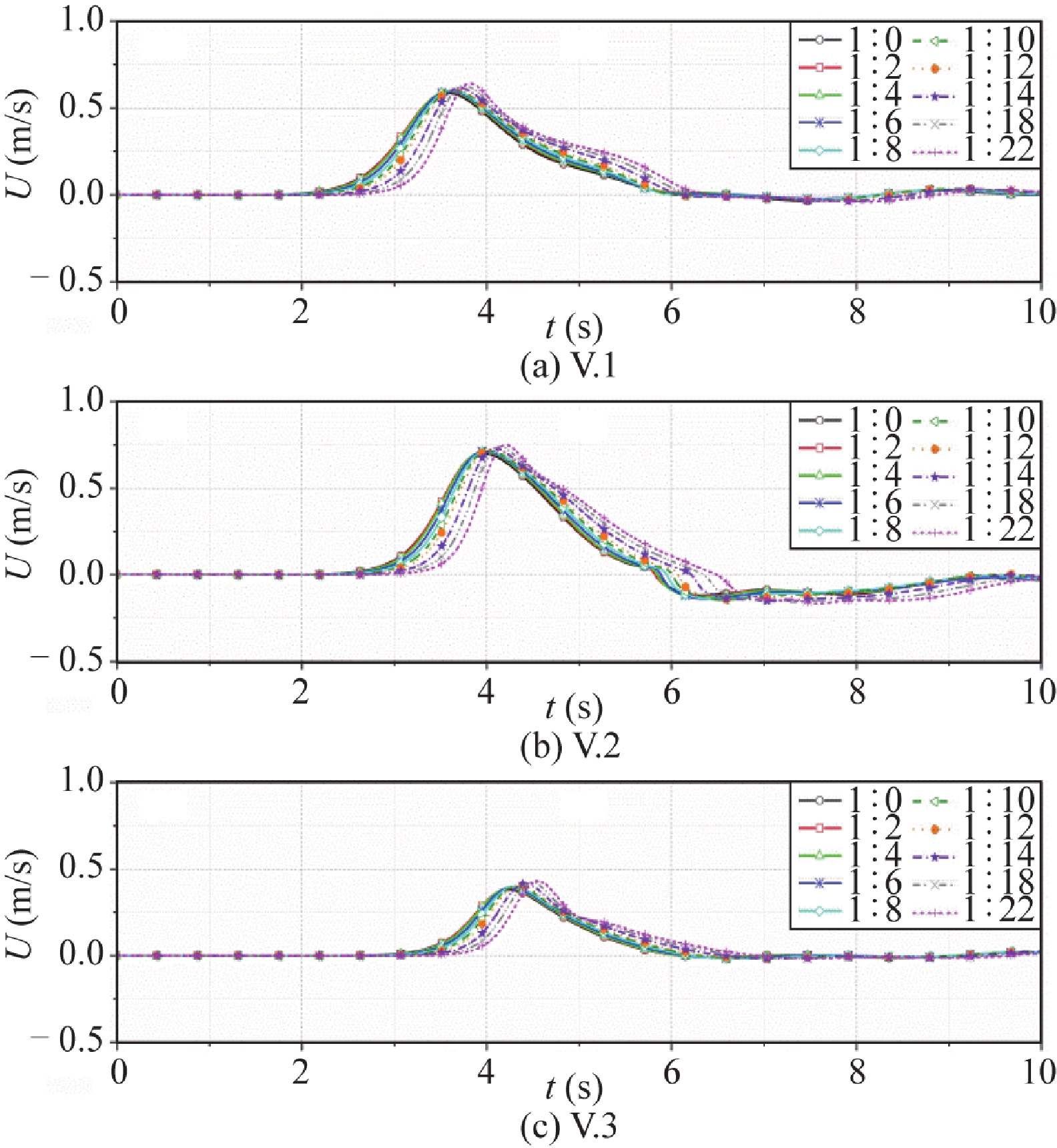
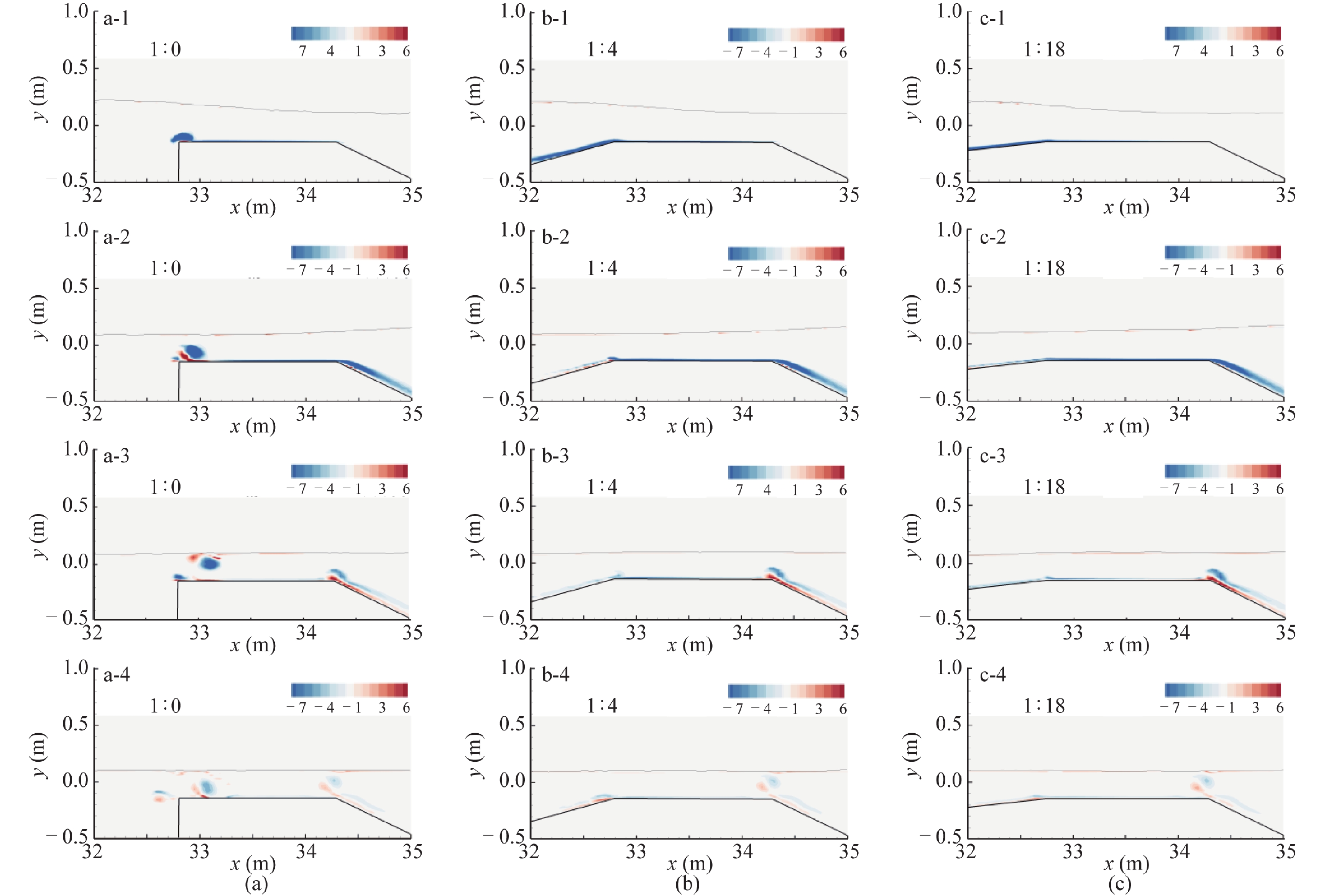
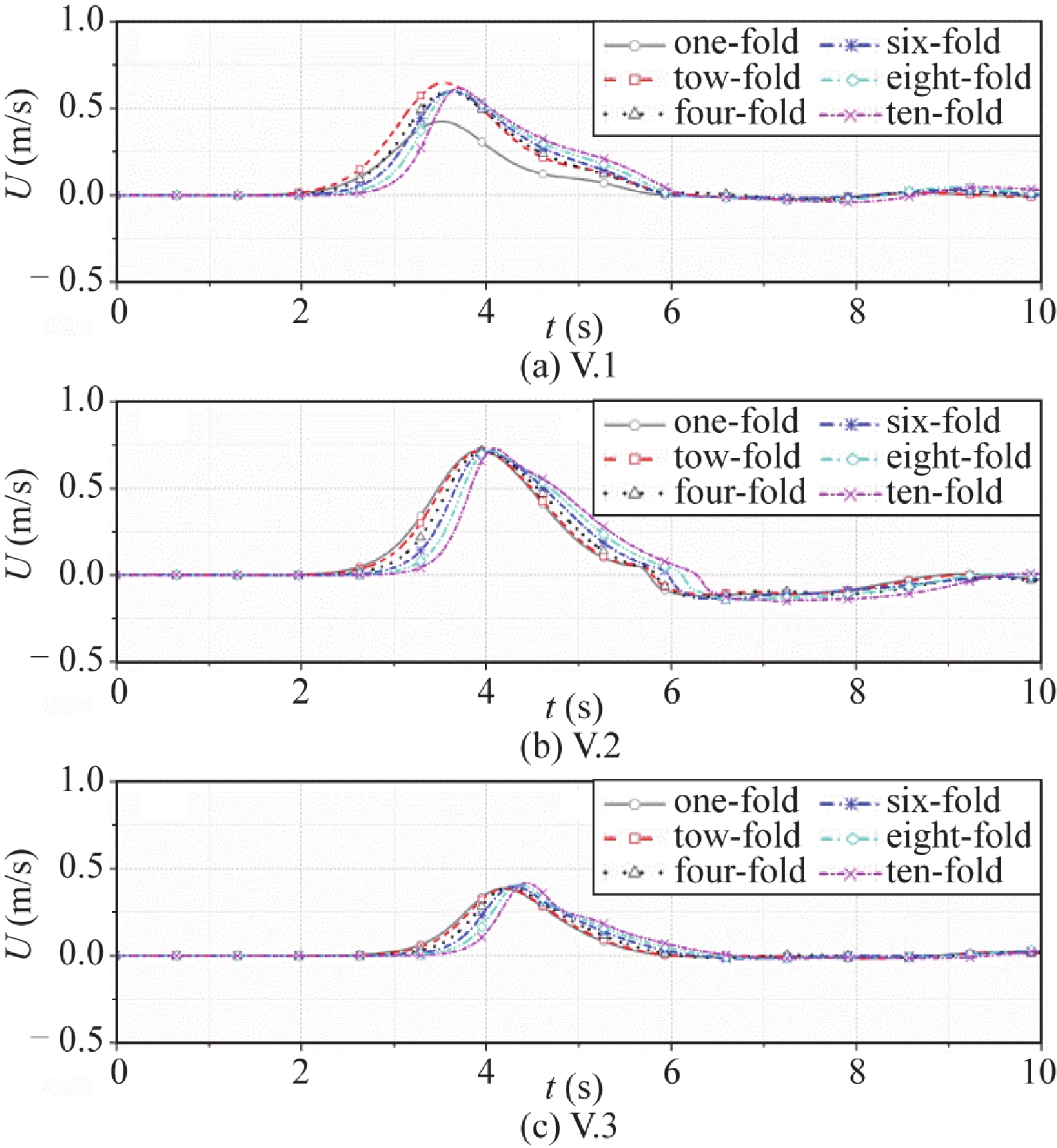
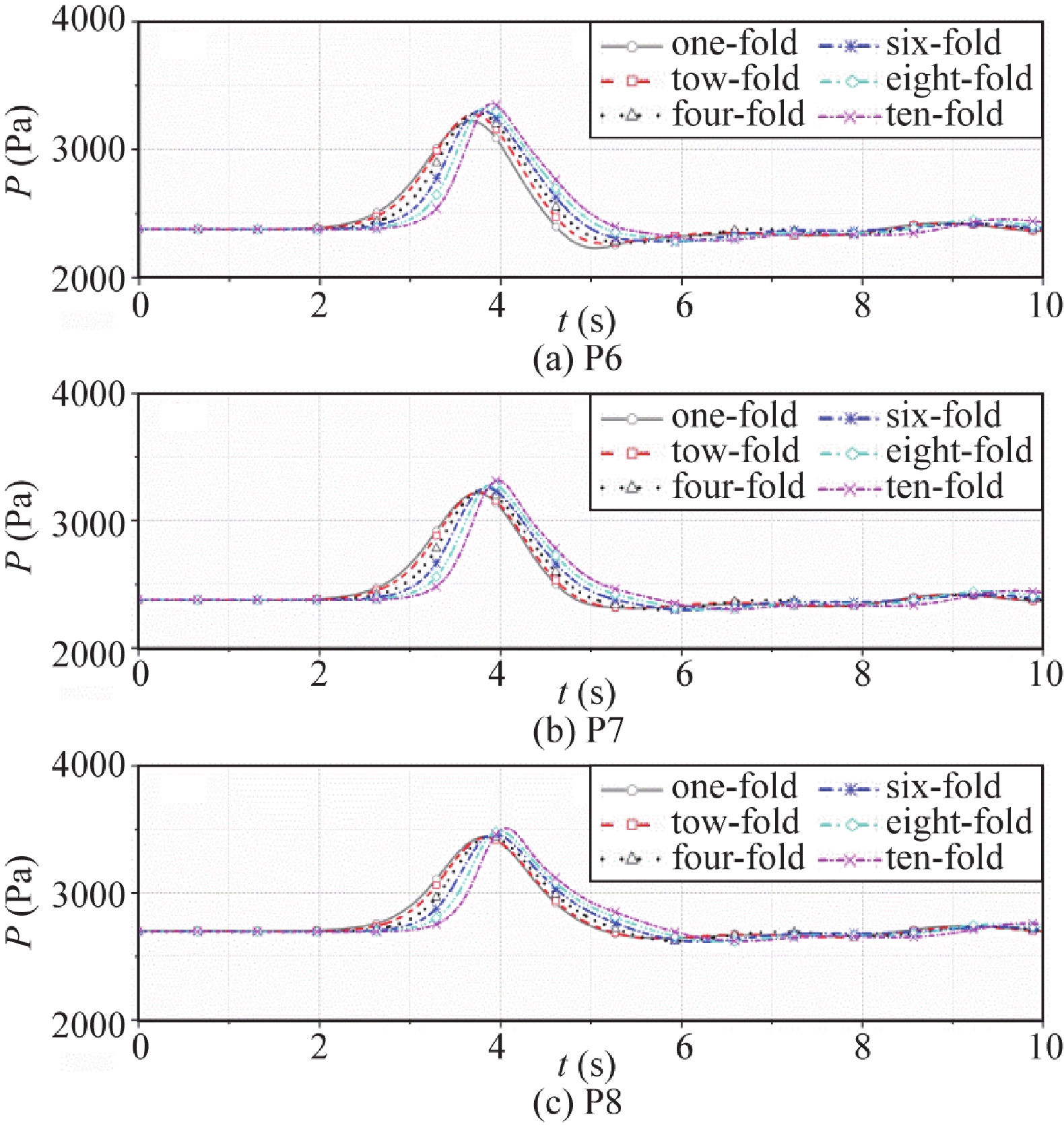
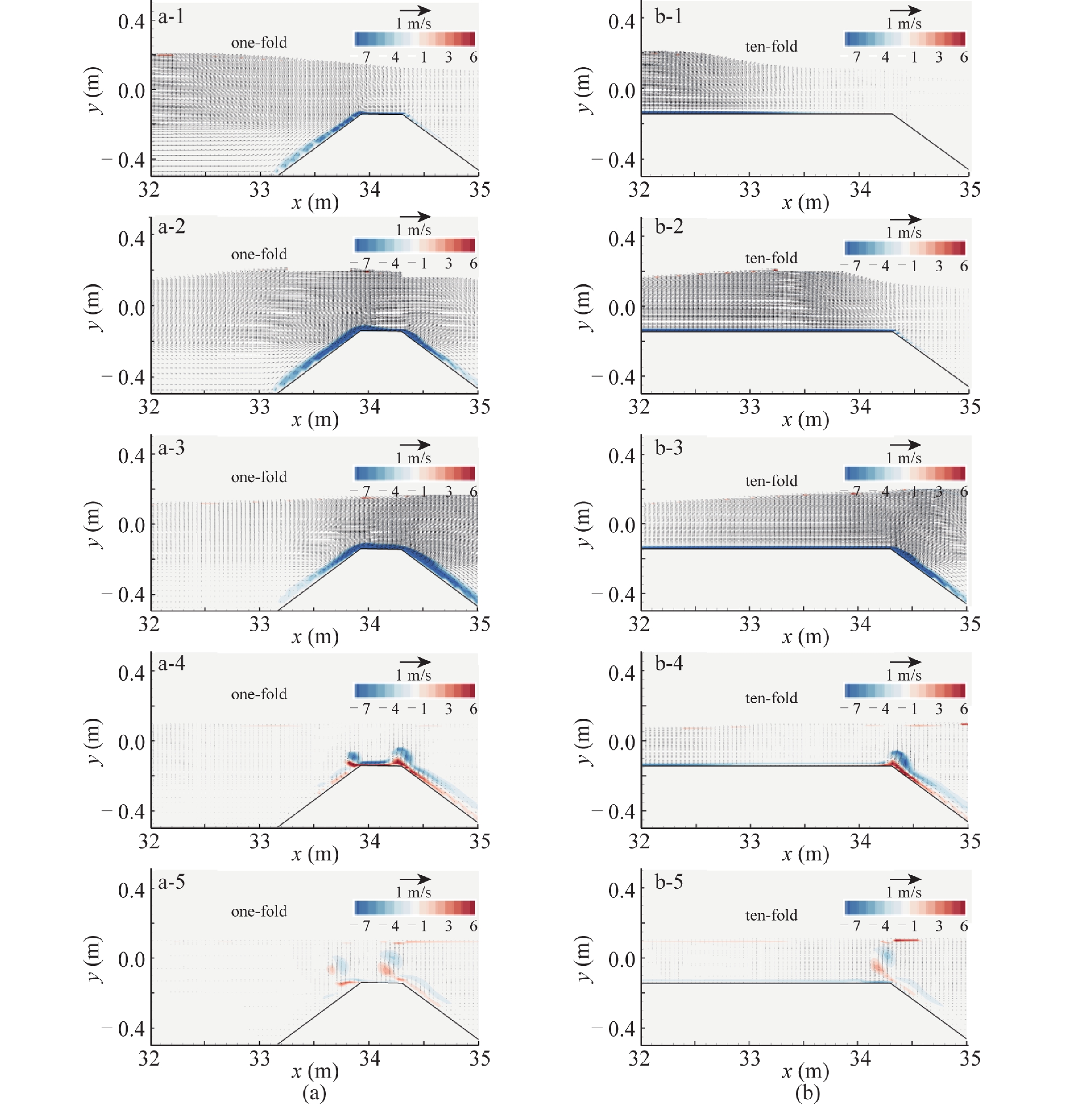
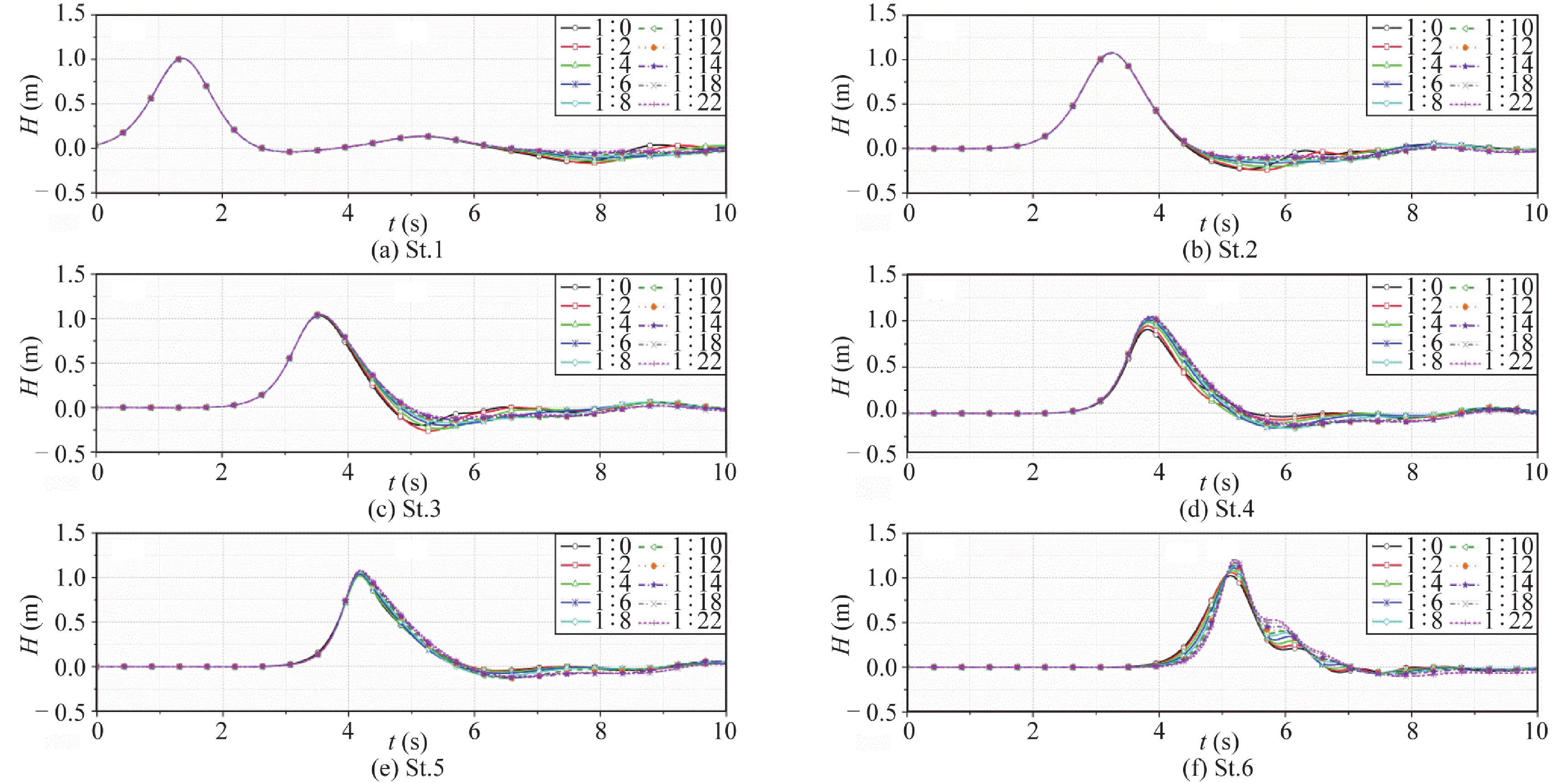
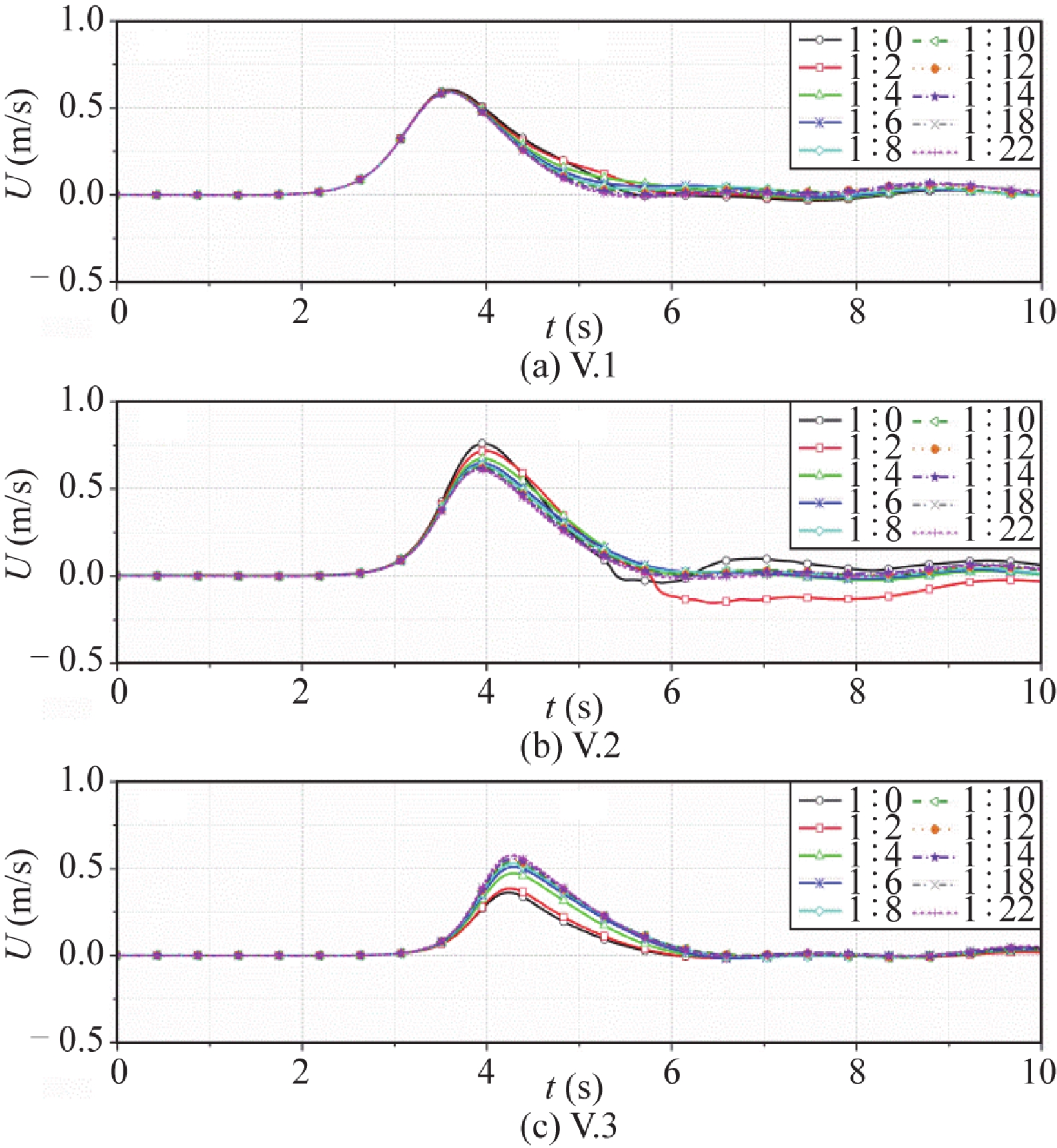
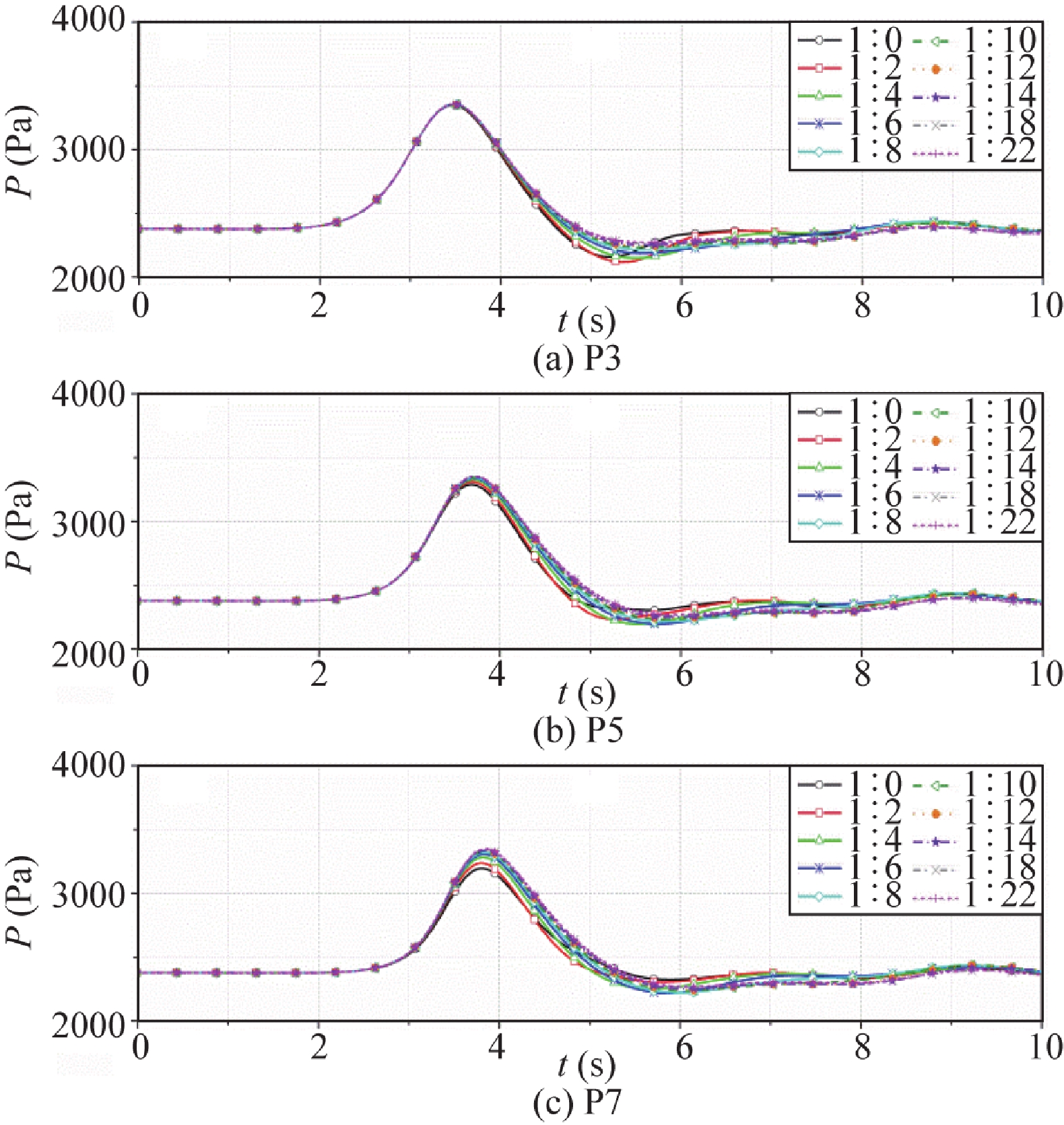
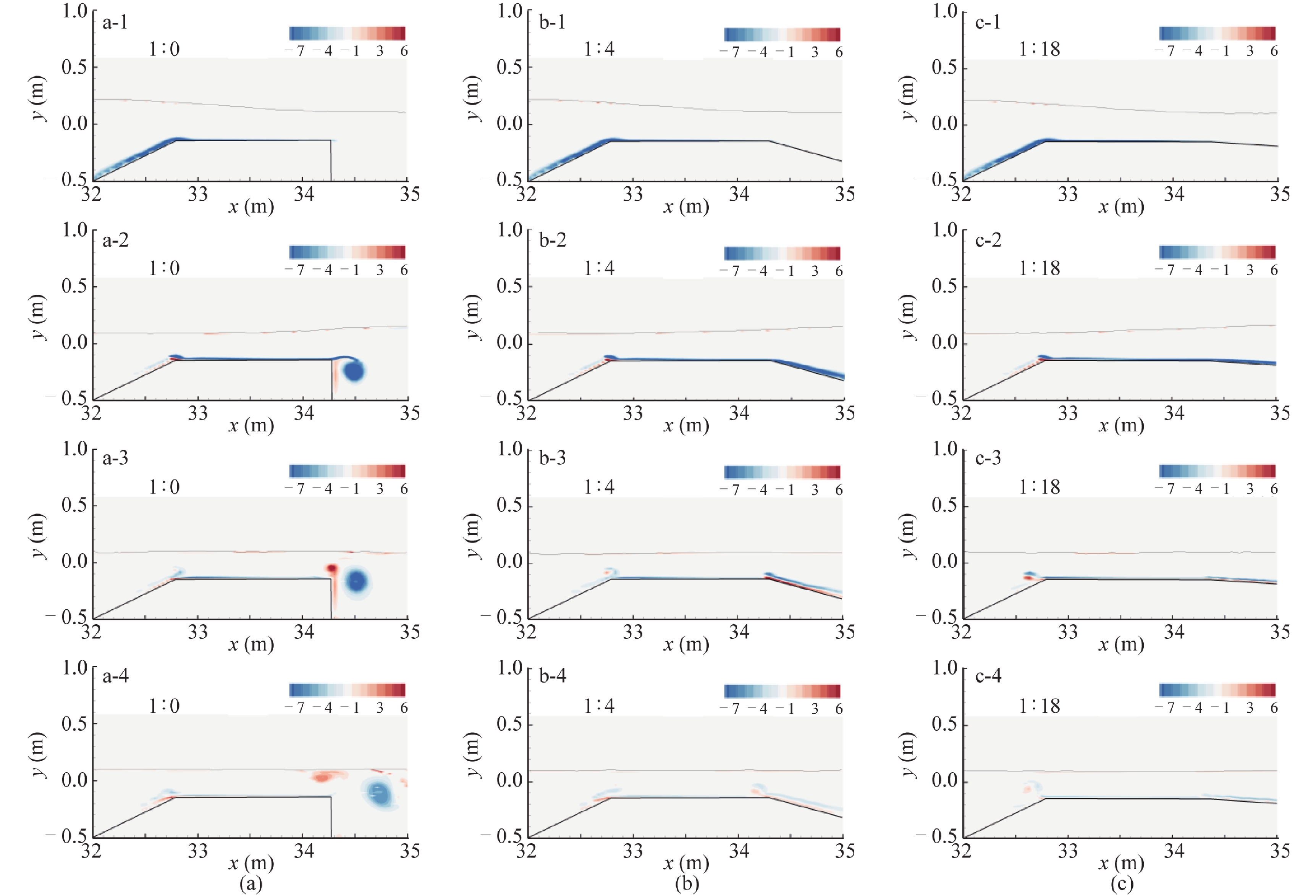
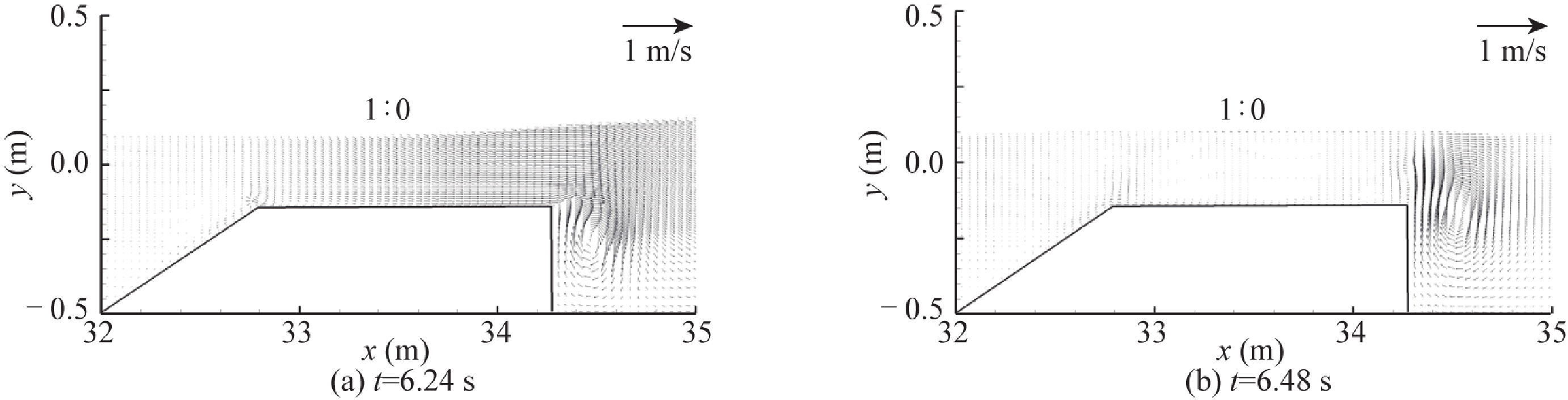
In this study, solitary waves passing over a submerged breakwater are investigated both experimentally and numerically. A total of 9 experimental conditions are carried out, including different incident wave heights and water depths. Numerical simulations are performed using a high-order finite-difference model solving Navier–Stokes (N–S) equations. The predicted water wave elevation, velocity and pressure show good agreement with experimental data, verifying the accuracy and capacity of the numerical model. Furthermore, parametric studies are conducted by numerical modelling to examine the effects of the geometrical features of submerged dike on hydrodynamic characteristics around the breakwater.
In this study, solitary waves passing over a submerged breakwater are investigated both experimentally and numerically. A total of 9 experimental conditions are carried out, including different incident wave heights and water depths. Numerical simulations are performed using a high-order finite-difference model solving Navier–Stokes (N–S) equations. The predicted water wave elevation, velocity and pressure show good agreement with experimental data, verifying the accuracy and capacity of the numerical model. Furthermore, parametric studies are conducted by numerical modelling to examine the effects of the geometrical features of submerged dike on hydrodynamic characteristics around the breakwater.





2019, 33(3): 268-278.
doi: 10.1007/s13344-019-0026-4
Abstract:
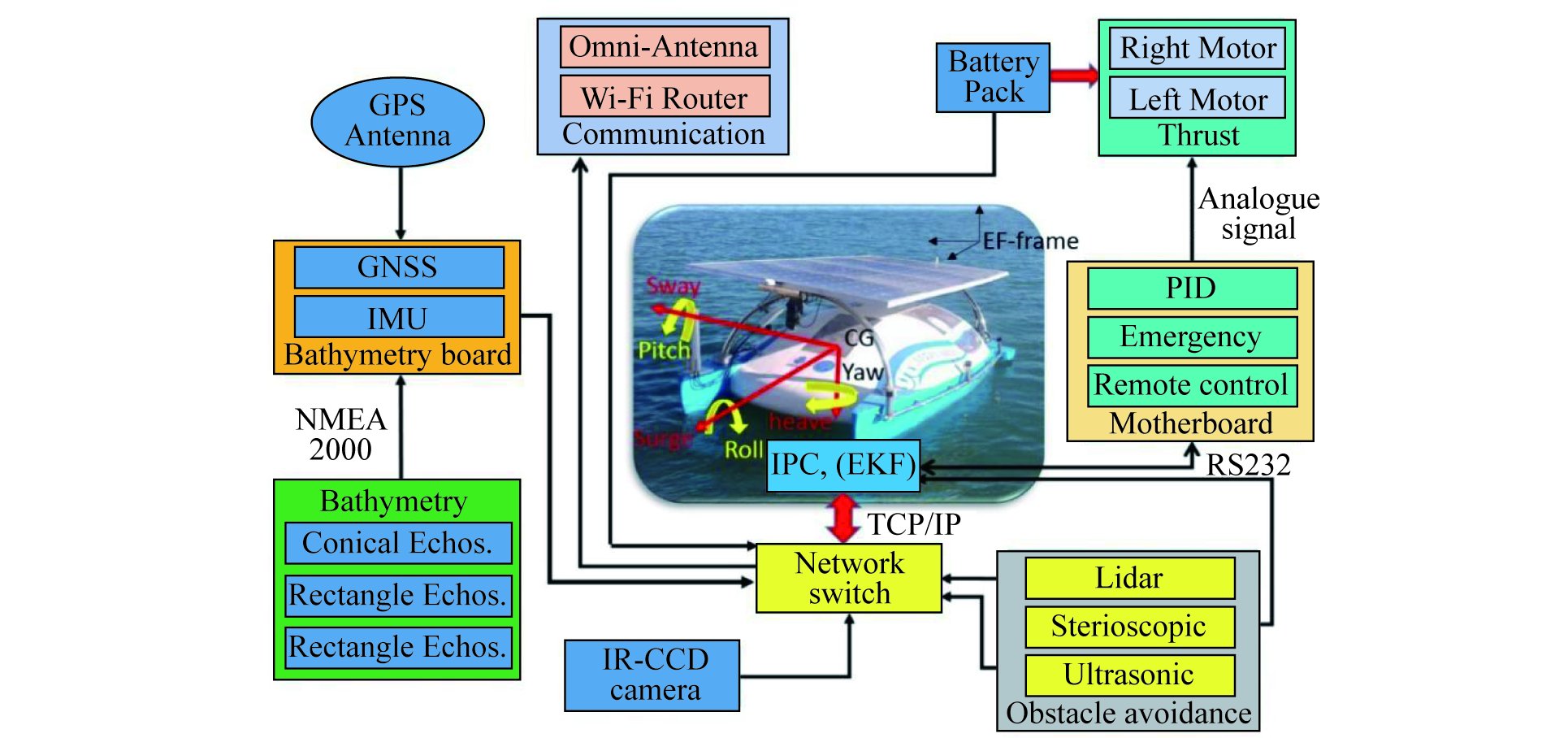
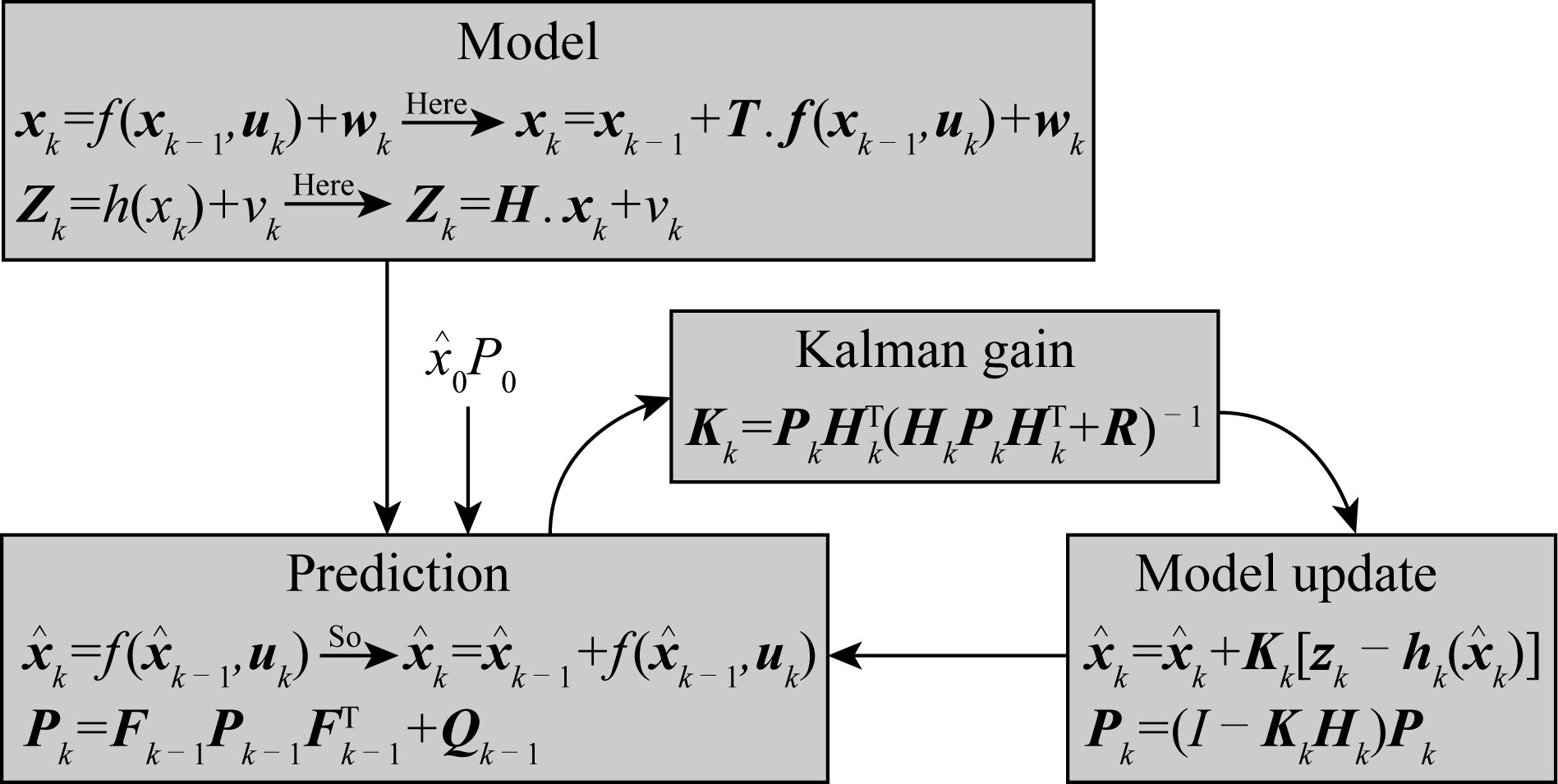
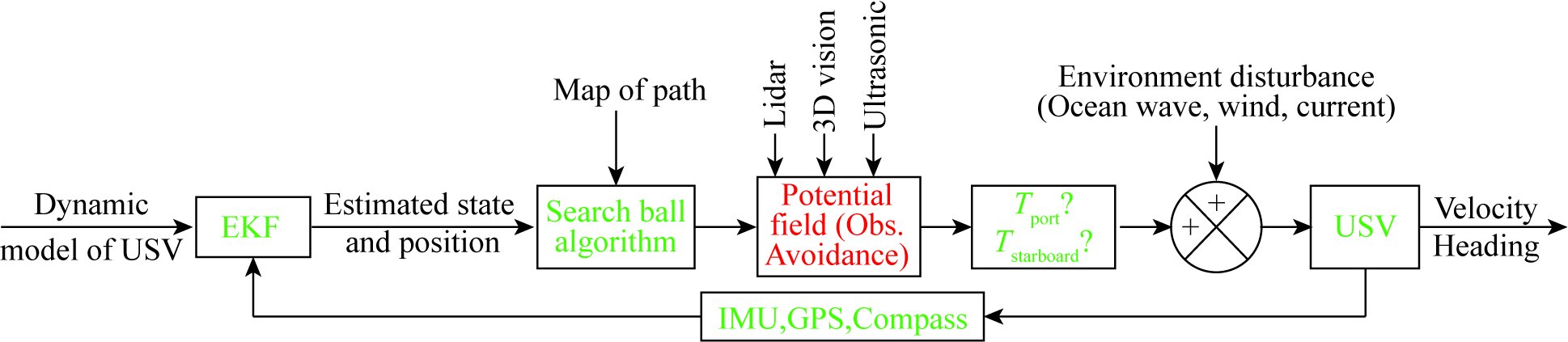
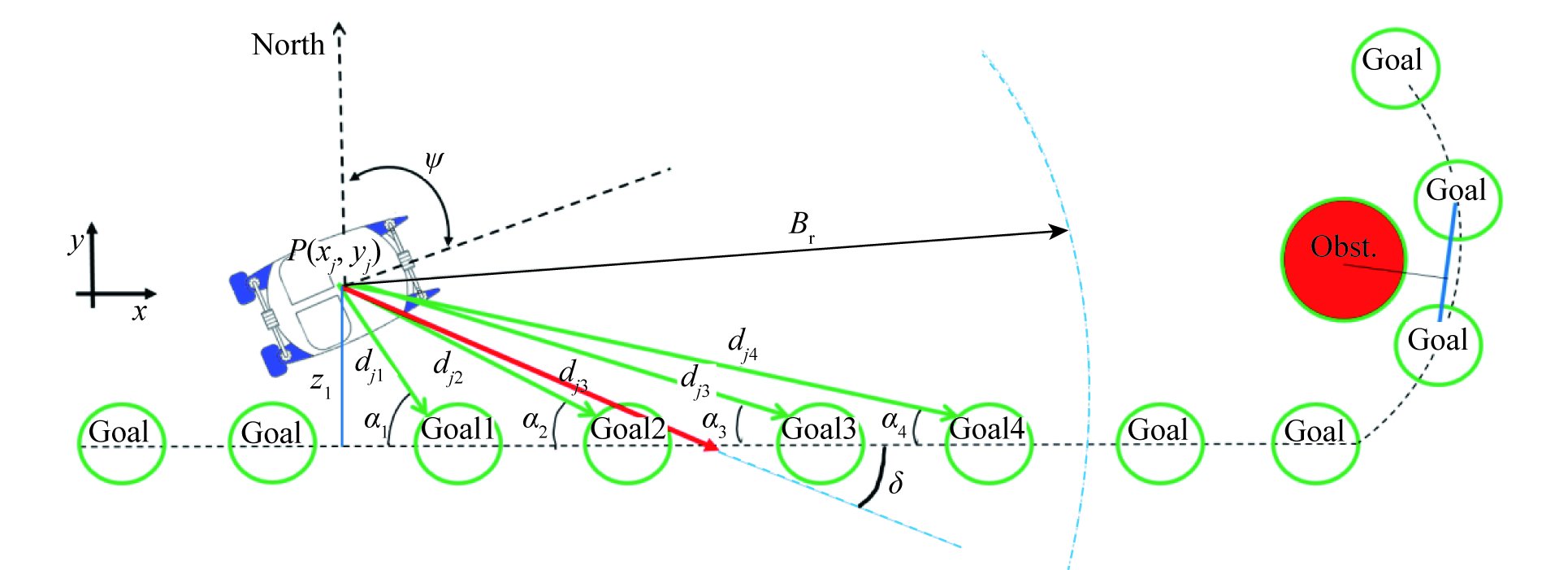
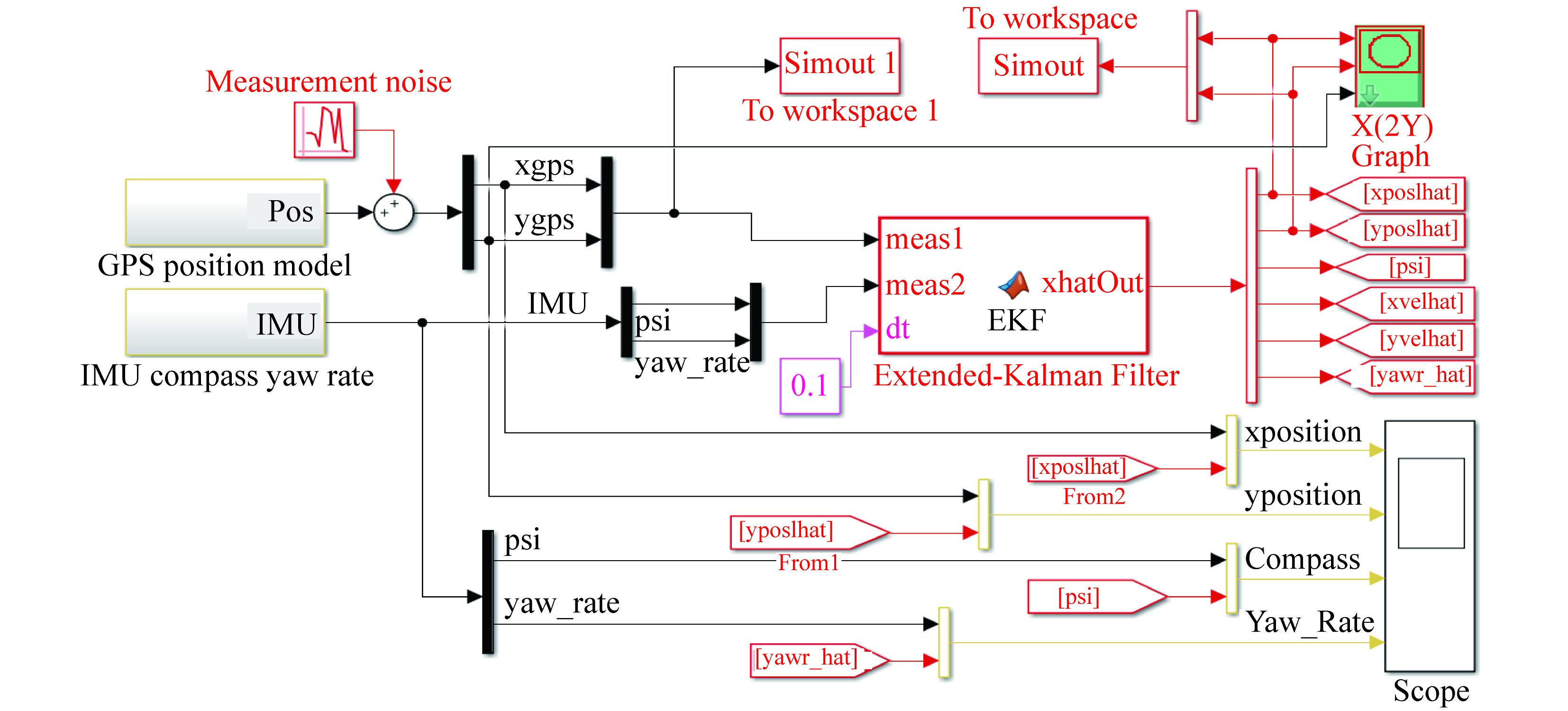
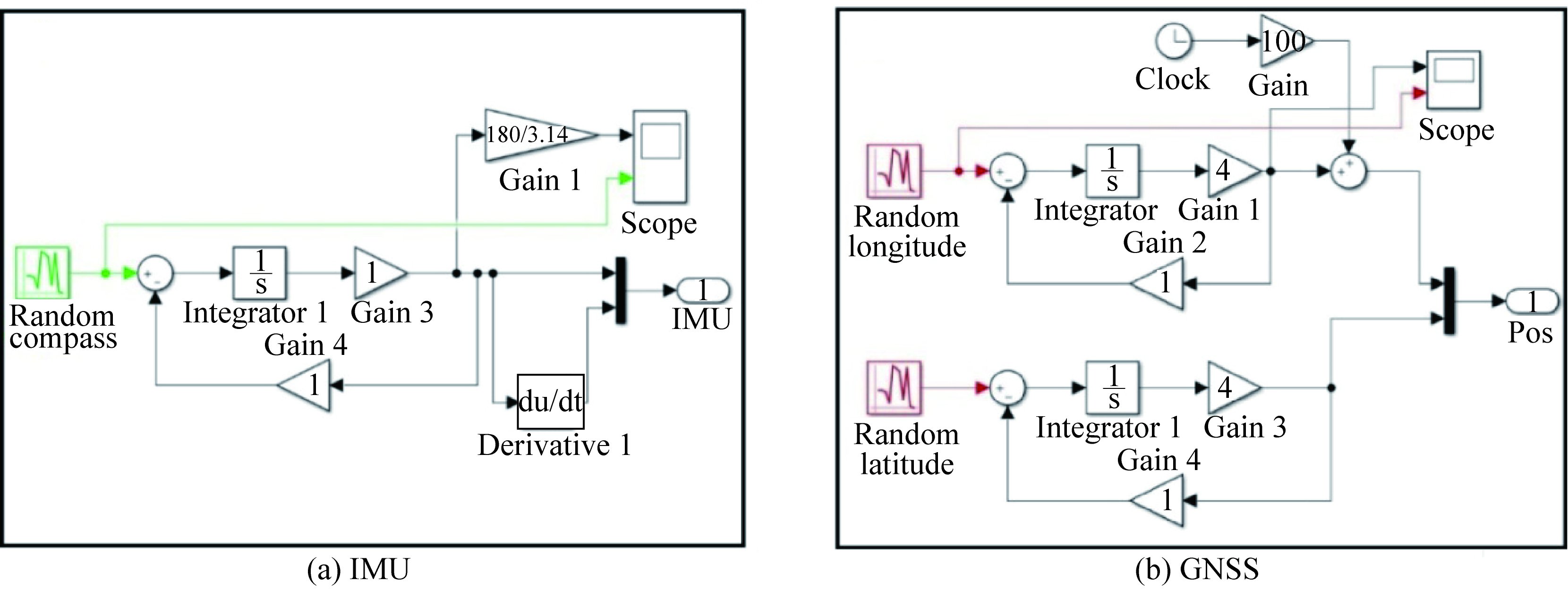
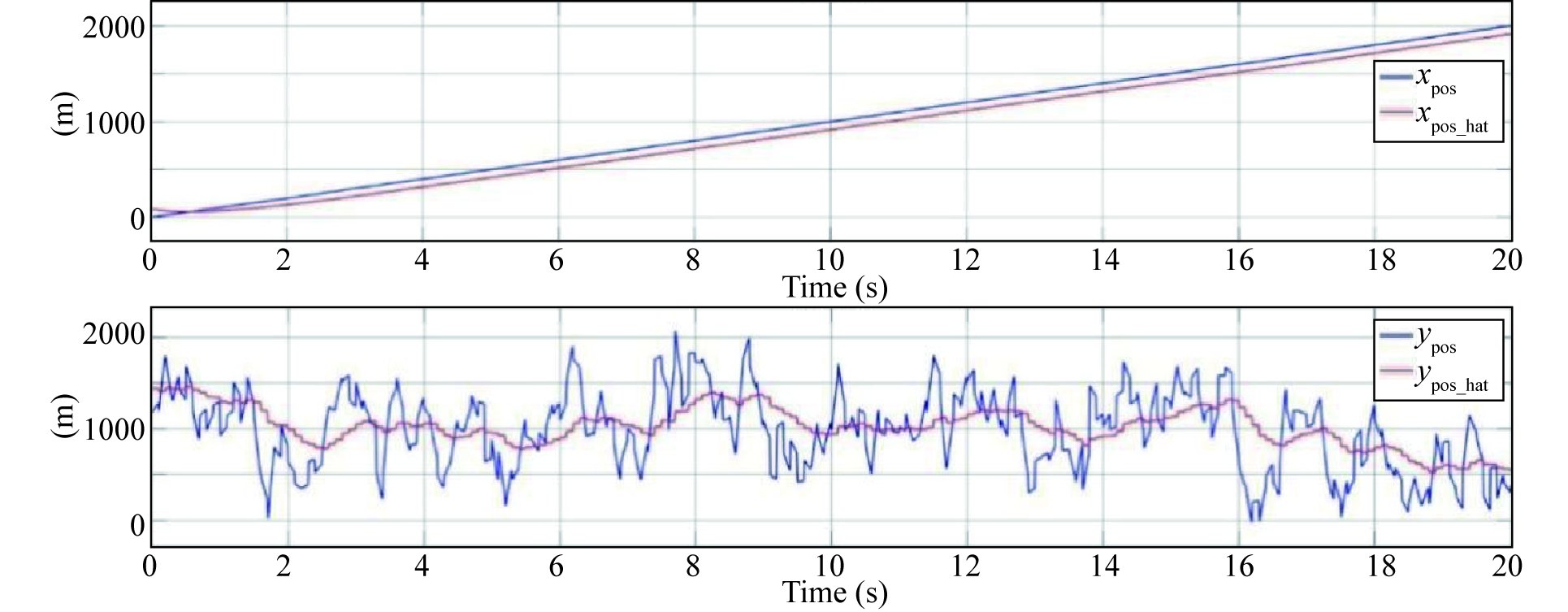
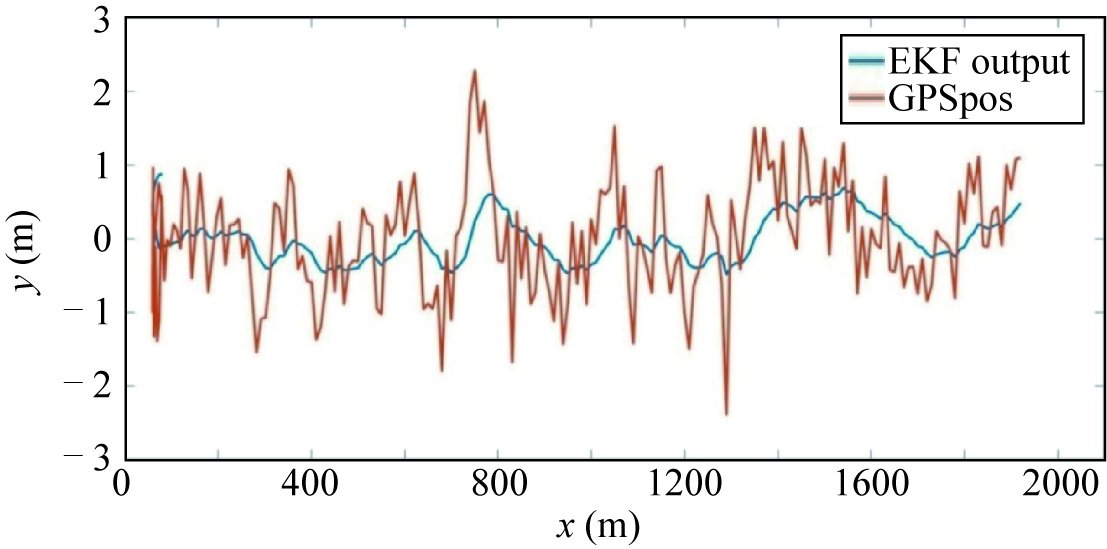
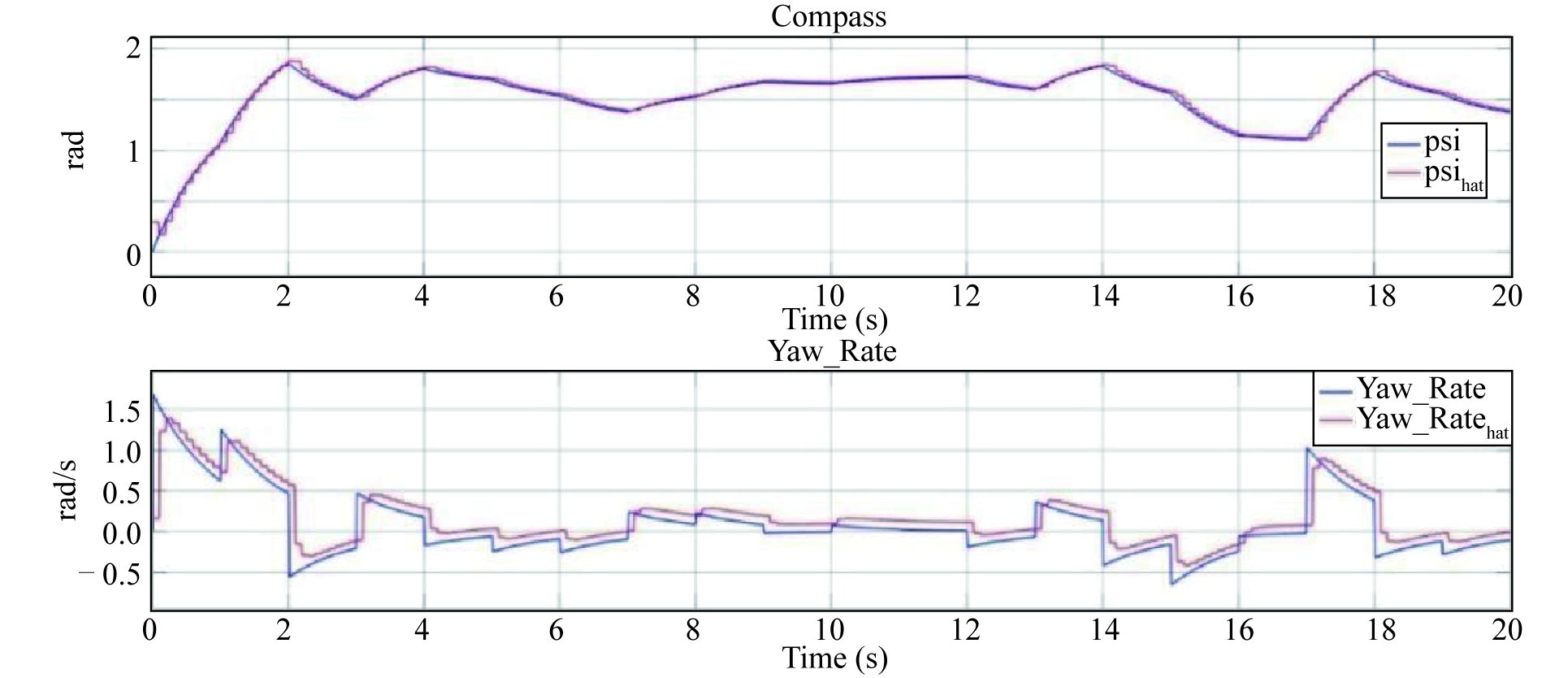
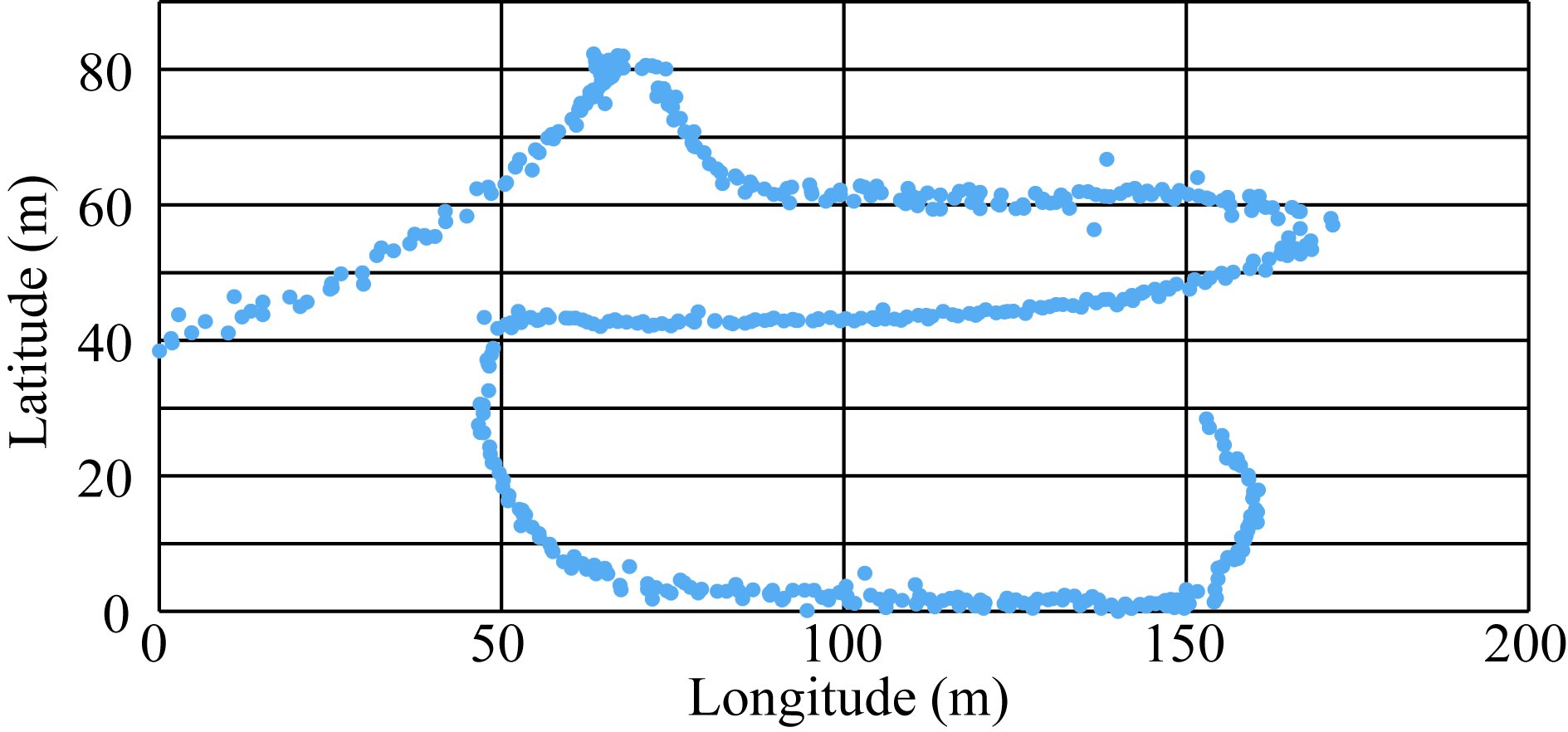
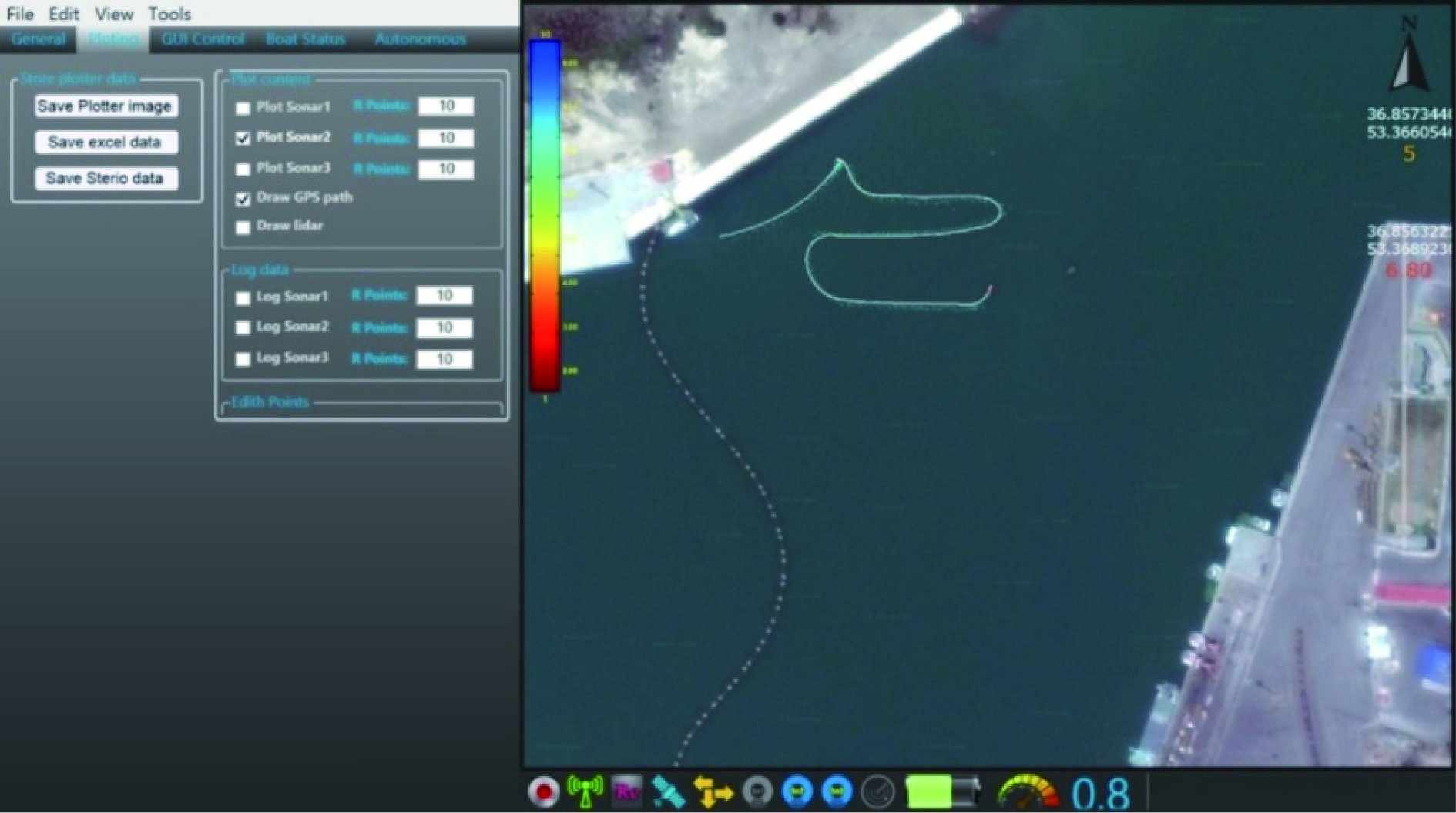
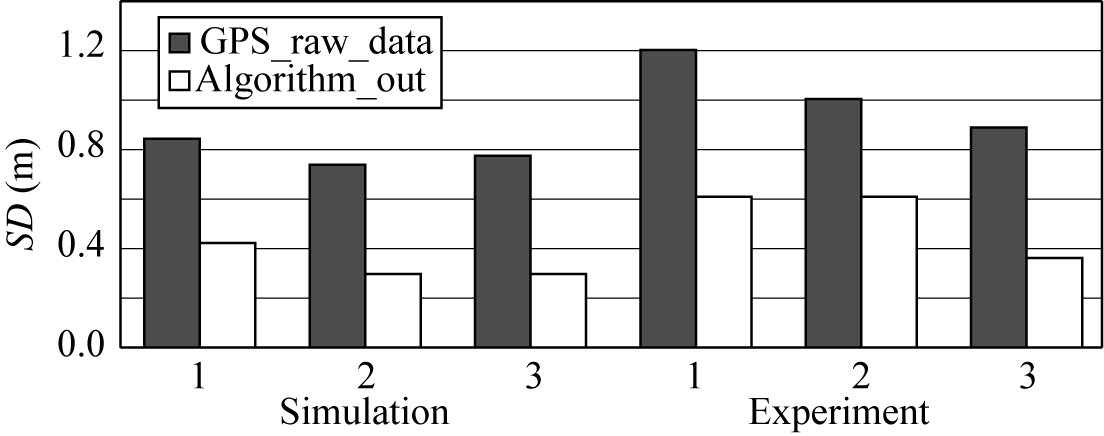
Performing repeatable duties automatically was the dreams of human being for centuries. Although full autonomy has long been dreamed of by visionaries, many researches have been performed for surface vehicles automation since the last century to get close to this dream stepwise. To increase daily working hours and accuracy and reduce cost, operations such as hydrography are susceptible for autonomy. Beside platform topology, installed sensors and energy resources, the core elements of any autonomous surface vehicle are navigation, guidance and control systems. To perform bathymetry operation in autonomy manner, a reliable and robust navigation algorithm is designed and embedded in an autonomous surface vehicle titled Morvarid. Morvarid is a plug-in hybrid solar powered catamaran boat. The developed algorithm is a combination of extended Kalman filter, search ball and potential field approaches. Many experimental field tests are carried out after simulation in Simulink environment. Test results illustrated the algorithm and improved the path followed by reducing SD and RMSE and there is a good correlation between simulation run and experimental tests.
Performing repeatable duties automatically was the dreams of human being for centuries. Although full autonomy has long been dreamed of by visionaries, many researches have been performed for surface vehicles automation since the last century to get close to this dream stepwise. To increase daily working hours and accuracy and reduce cost, operations such as hydrography are susceptible for autonomy. Beside platform topology, installed sensors and energy resources, the core elements of any autonomous surface vehicle are navigation, guidance and control systems. To perform bathymetry operation in autonomy manner, a reliable and robust navigation algorithm is designed and embedded in an autonomous surface vehicle titled Morvarid. Morvarid is a plug-in hybrid solar powered catamaran boat. The developed algorithm is a combination of extended Kalman filter, search ball and potential field approaches. Many experimental field tests are carried out after simulation in Simulink environment. Test results illustrated the algorithm and improved the path followed by reducing SD and RMSE and there is a good correlation between simulation run and experimental tests.

2019, 33(3): 279-287.
doi: 10.1007/s13344-019-0027-3
Abstract:
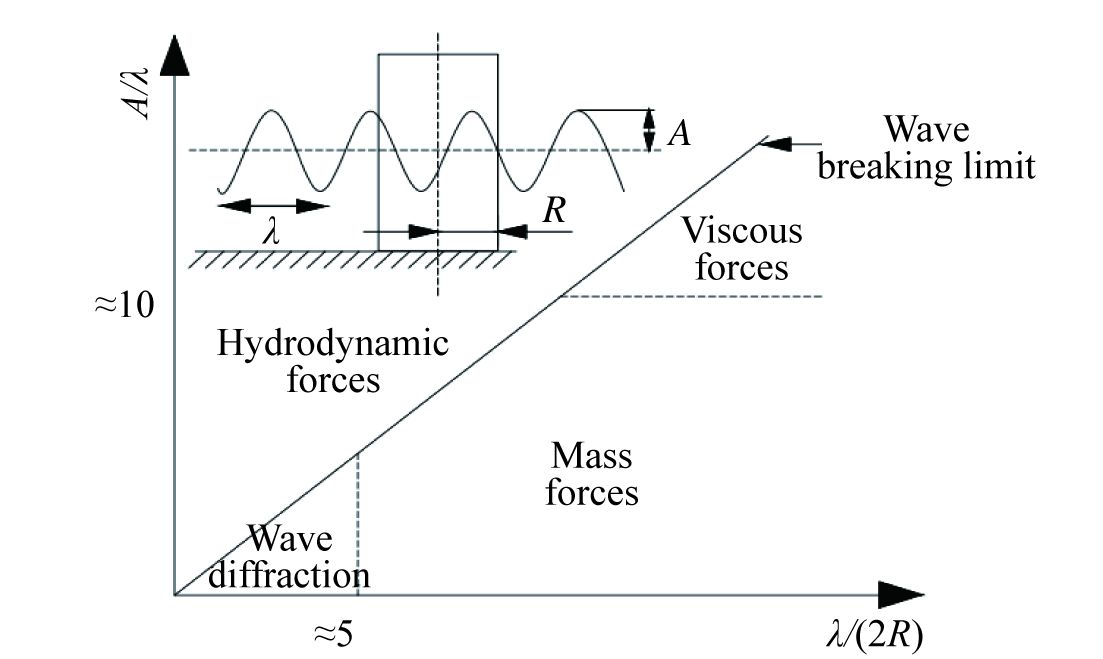
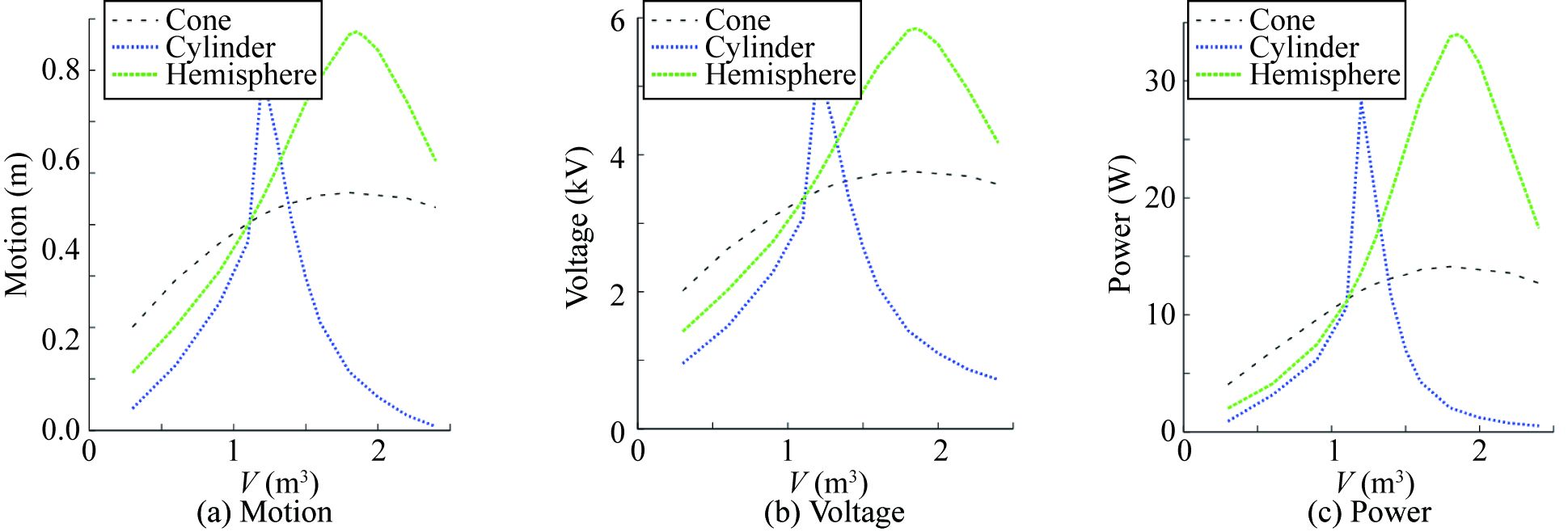
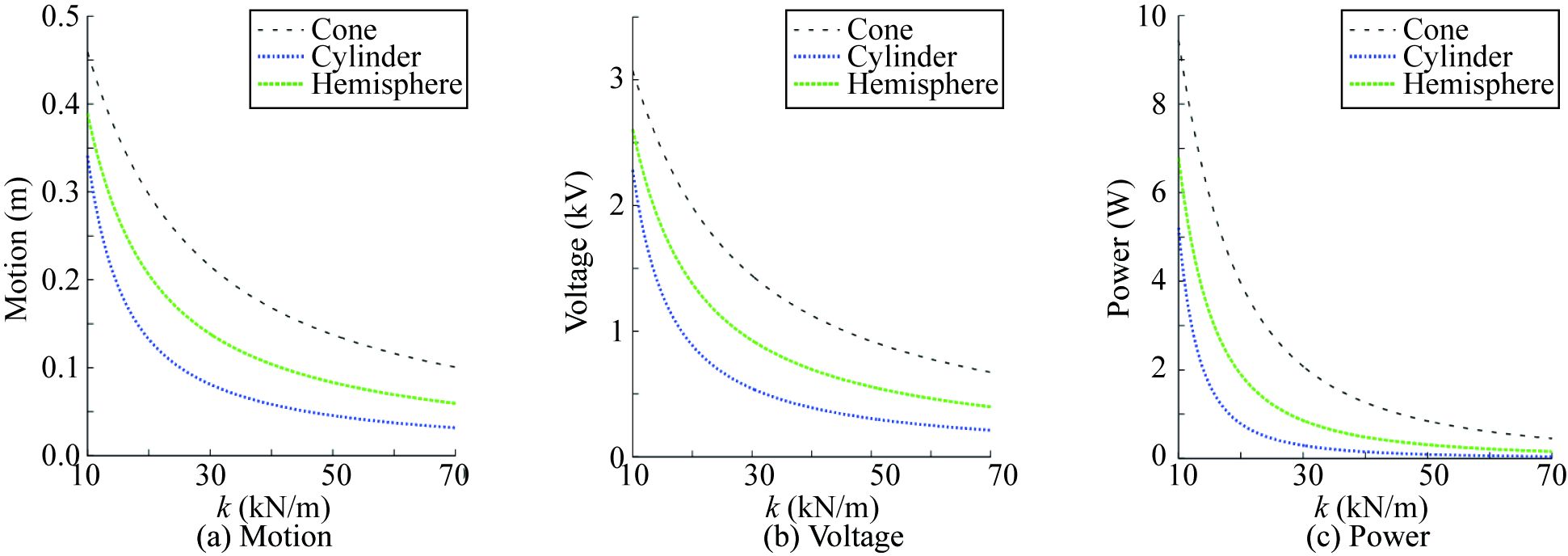
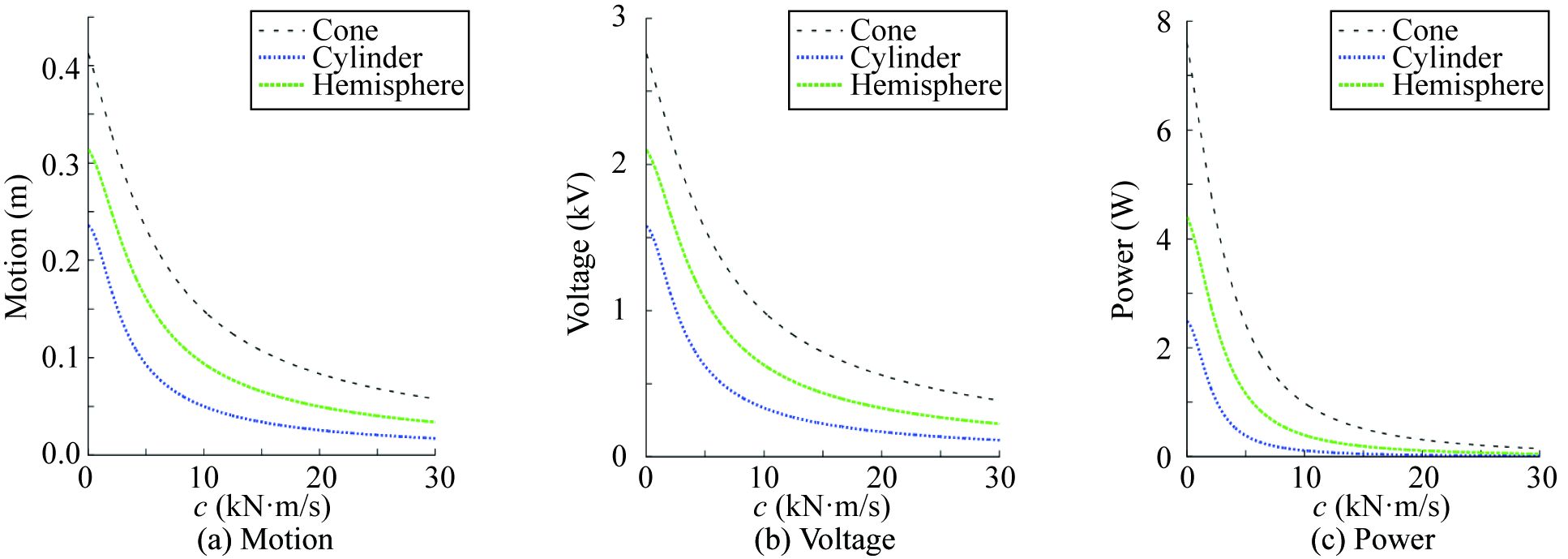
This paper mainly describes the influence factors of the captured energy power by huge wave energy harvesters, in which the vertical motion of buoy can transform ocean’s potential energy into piezoelectric energy power by undulating waves. Firstly, related environmental coefficients are analyzed by means of the incident wave theory. Besides, the geometric structural parameters are also analyzed and compared under optimal environmental coefficients with semi-analytical solutions. Thirdly, the numerical results also show the impact trend of hydrodynamic parameters and geometric volume on motion, voltage and power with qualitative agreement. The numerical simulation confirms that the improved structure parameters could markedly deliver sufficient power under the same conditions with long-time stability.
This paper mainly describes the influence factors of the captured energy power by huge wave energy harvesters, in which the vertical motion of buoy can transform ocean’s potential energy into piezoelectric energy power by undulating waves. Firstly, related environmental coefficients are analyzed by means of the incident wave theory. Besides, the geometric structural parameters are also analyzed and compared under optimal environmental coefficients with semi-analytical solutions. Thirdly, the numerical results also show the impact trend of hydrodynamic parameters and geometric volume on motion, voltage and power with qualitative agreement. The numerical simulation confirms that the improved structure parameters could markedly deliver sufficient power under the same conditions with long-time stability.

2019, 33(3): 288-296.
doi: 10.1007/s13344-019-0028-2
Abstract:
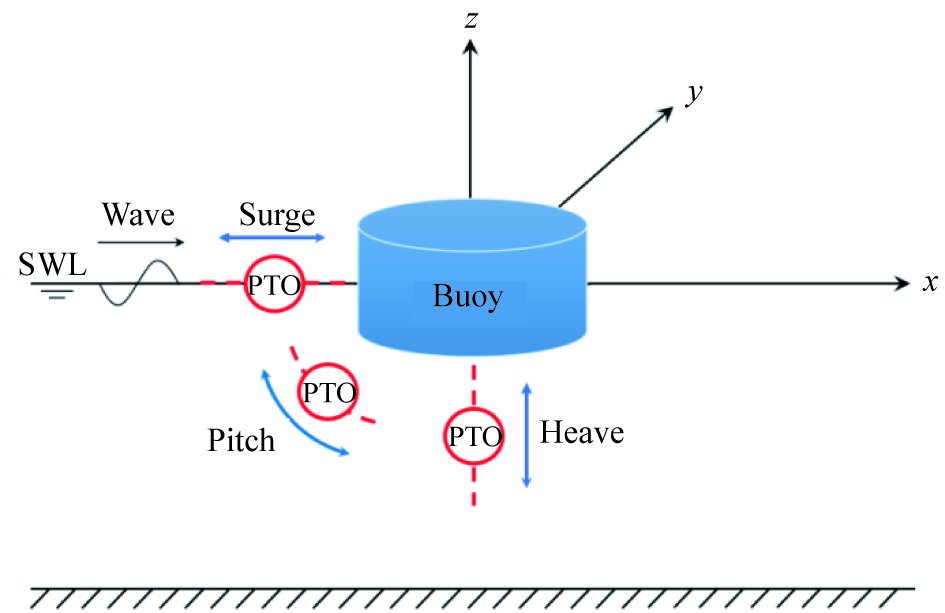
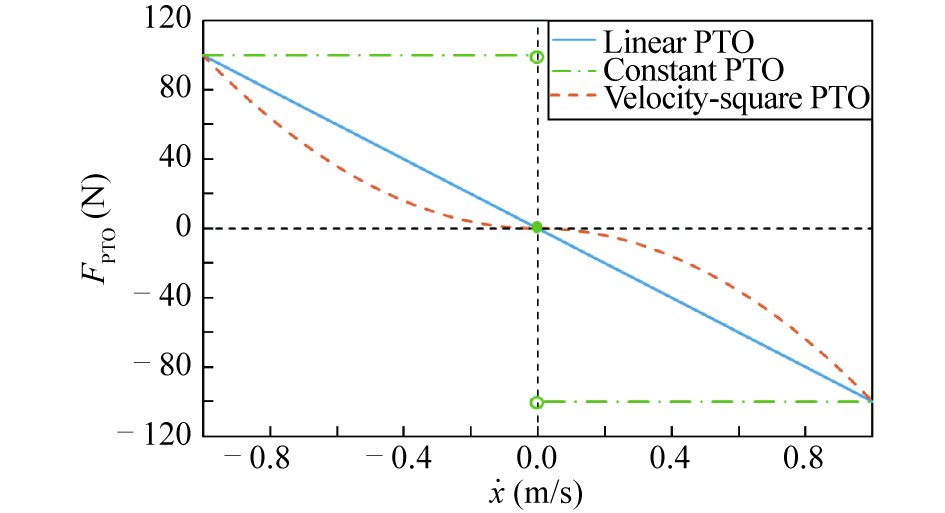
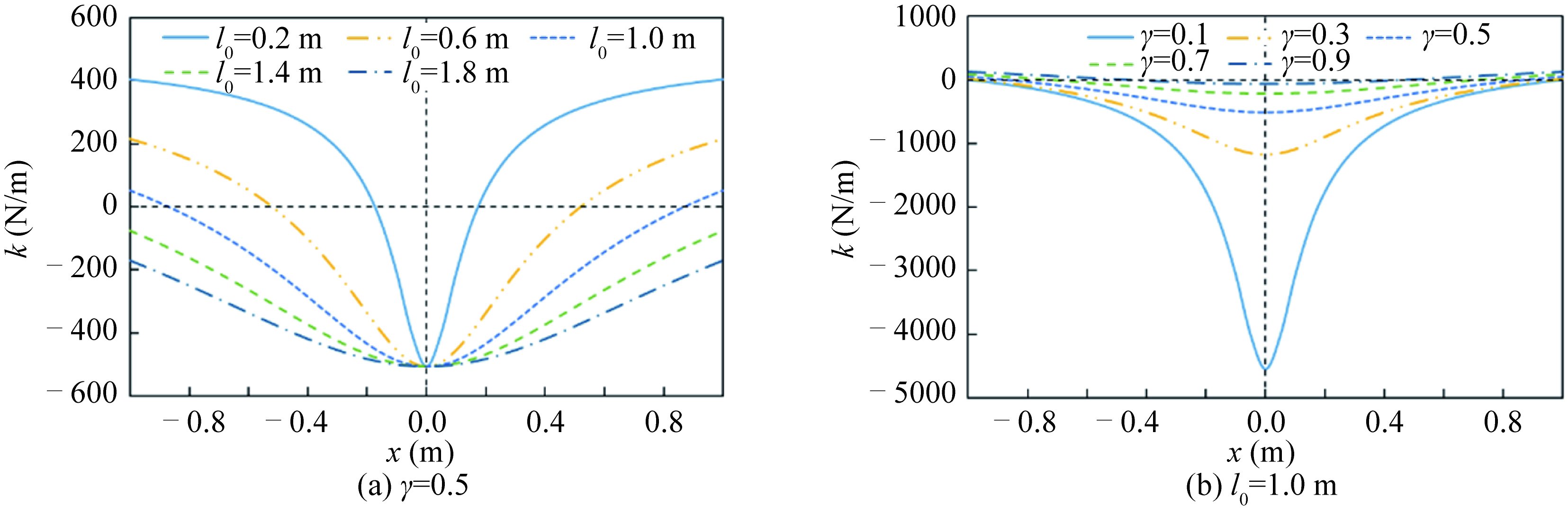
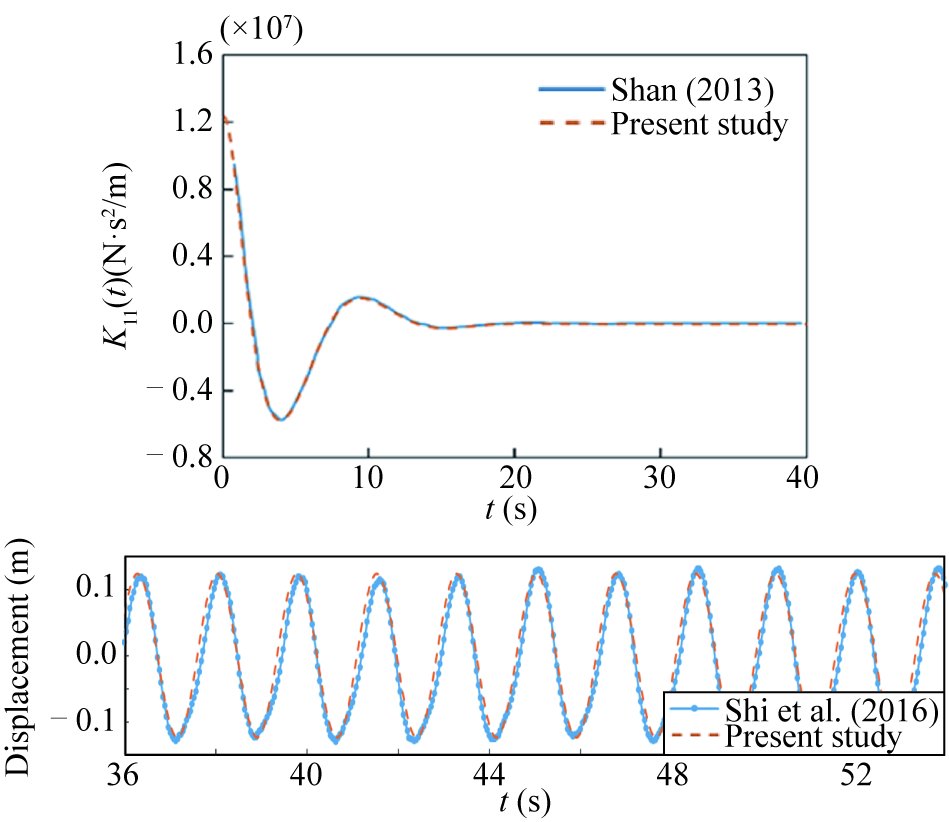
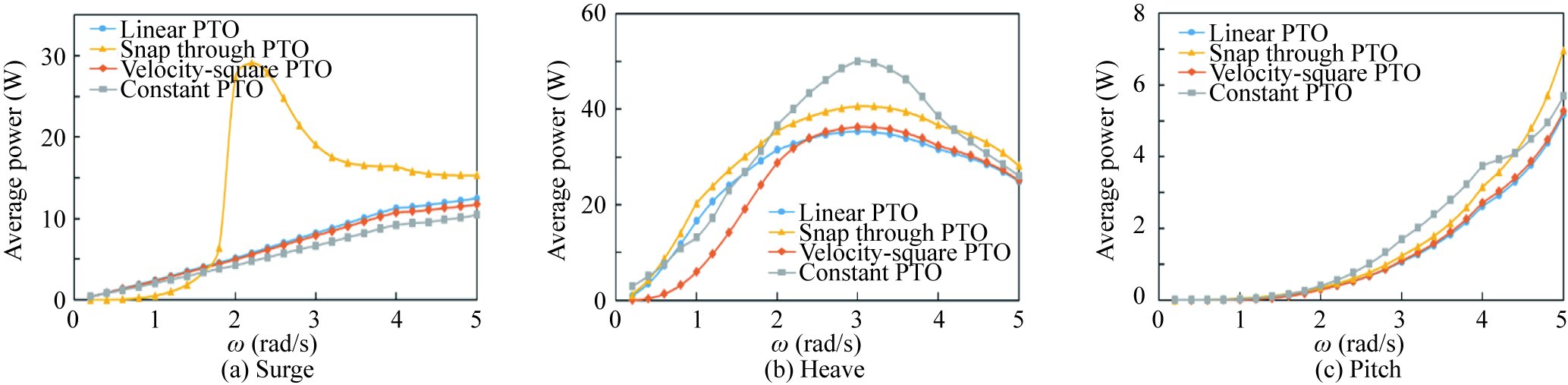
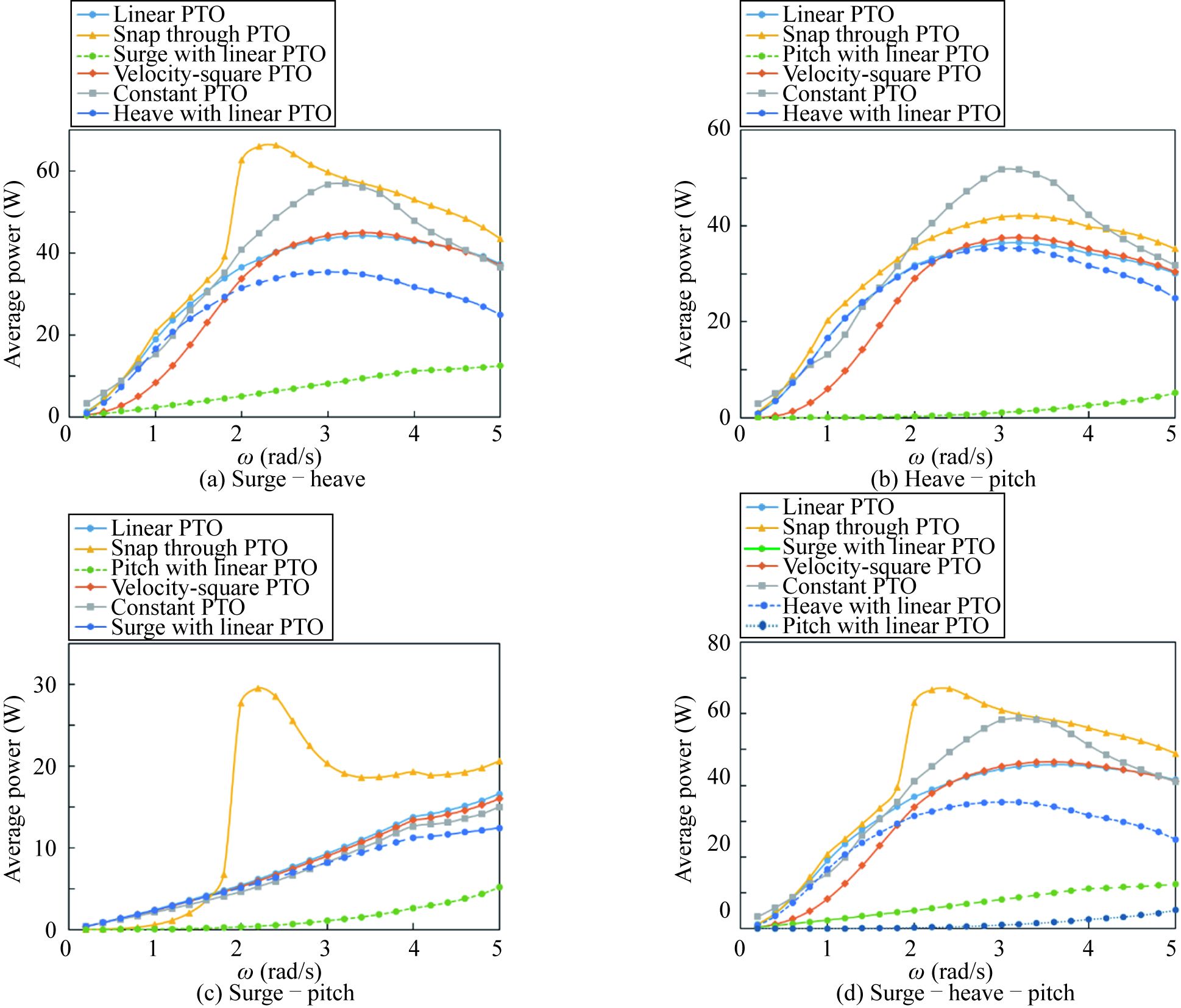
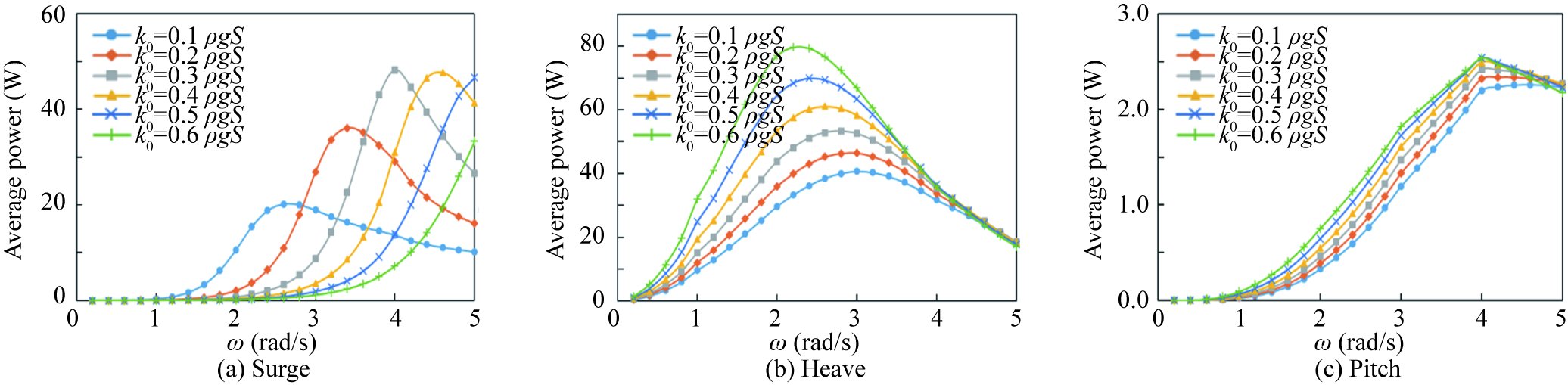
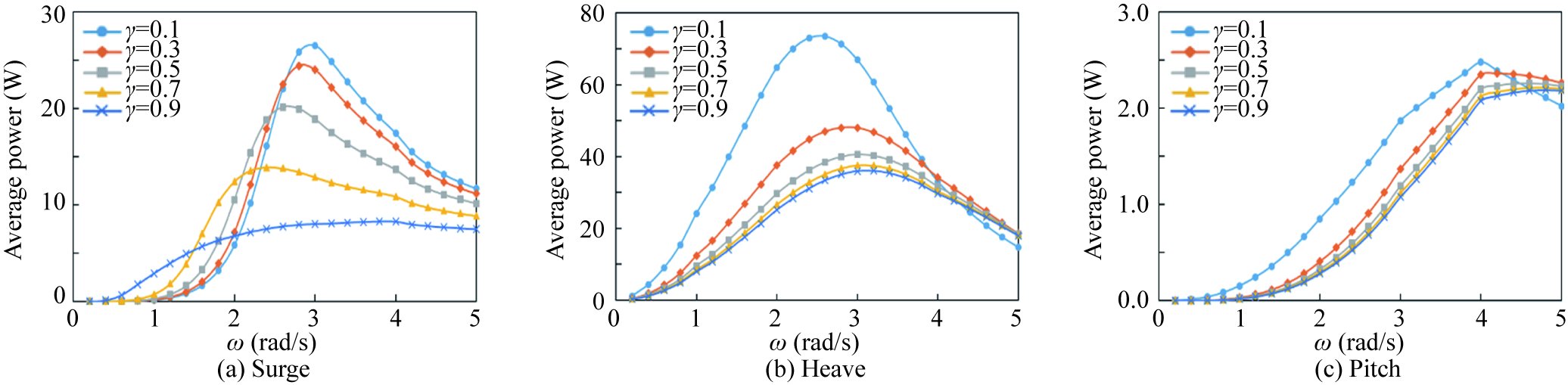
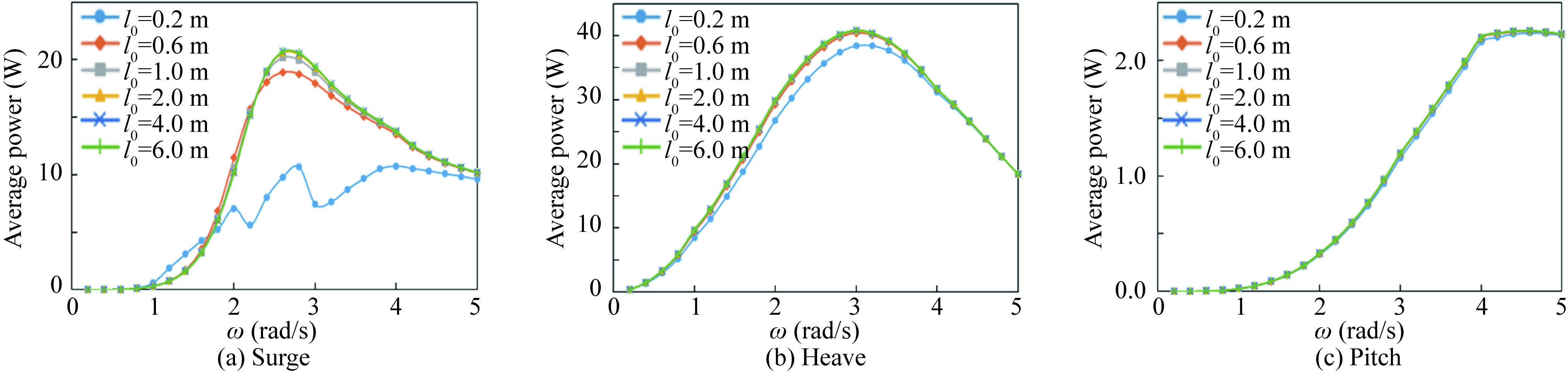
Among the wave energy converters (WECs), oscillating buoy is a promising type for wave energy development in offshore area. Conventional single-freedom oscillating buoy WECs with linear power take-off (PTO) system are less efficient under off-resonance conditions and have a narrow power capture bandwidth. Thus, a multi-freedom WEC with a nonlinear PTO system is proposed. This study examines a multi-freedom WEC with 3 degrees of freedom: surge, heave and pitch. Three different PTO systems (velocity-square, snap through, and constant PTO systems) and a traditional linear PTO system are applied to the WEC. A time-domain model is established using linear potential theory and Cummins equation. The kinematic equation is numerically calculated with the fourth-order Runge–Kutta method. The optimal average output power of the PTO systems in all degrees of freedom are obtained and compared. Other parameters of snap through PTO are also discussed in detail. Results show that according to the power capture performance, the order of the PTO systems from the best to worst is snap through PTO, constant PTO, linear PTO and velocity-square PTO. The resonant frequency of the WEC can be adjusted to the incident wave frequency by choosing specific parameters of the snap through PTO. Adding more DOFs can make the WEC get a better power performance in more wave frequencies. Both the above two methods can raise the WEC’s power capture performance significantly.
Among the wave energy converters (WECs), oscillating buoy is a promising type for wave energy development in offshore area. Conventional single-freedom oscillating buoy WECs with linear power take-off (PTO) system are less efficient under off-resonance conditions and have a narrow power capture bandwidth. Thus, a multi-freedom WEC with a nonlinear PTO system is proposed. This study examines a multi-freedom WEC with 3 degrees of freedom: surge, heave and pitch. Three different PTO systems (velocity-square, snap through, and constant PTO systems) and a traditional linear PTO system are applied to the WEC. A time-domain model is established using linear potential theory and Cummins equation. The kinematic equation is numerically calculated with the fourth-order Runge–Kutta method. The optimal average output power of the PTO systems in all degrees of freedom are obtained and compared. Other parameters of snap through PTO are also discussed in detail. Results show that according to the power capture performance, the order of the PTO systems from the best to worst is snap through PTO, constant PTO, linear PTO and velocity-square PTO. The resonant frequency of the WEC can be adjusted to the incident wave frequency by choosing specific parameters of the snap through PTO. Adding more DOFs can make the WEC get a better power performance in more wave frequencies. Both the above two methods can raise the WEC’s power capture performance significantly.
2019, 33(3): 297-308.
doi: 10.1007/s13344-019-0029-1
Abstract:
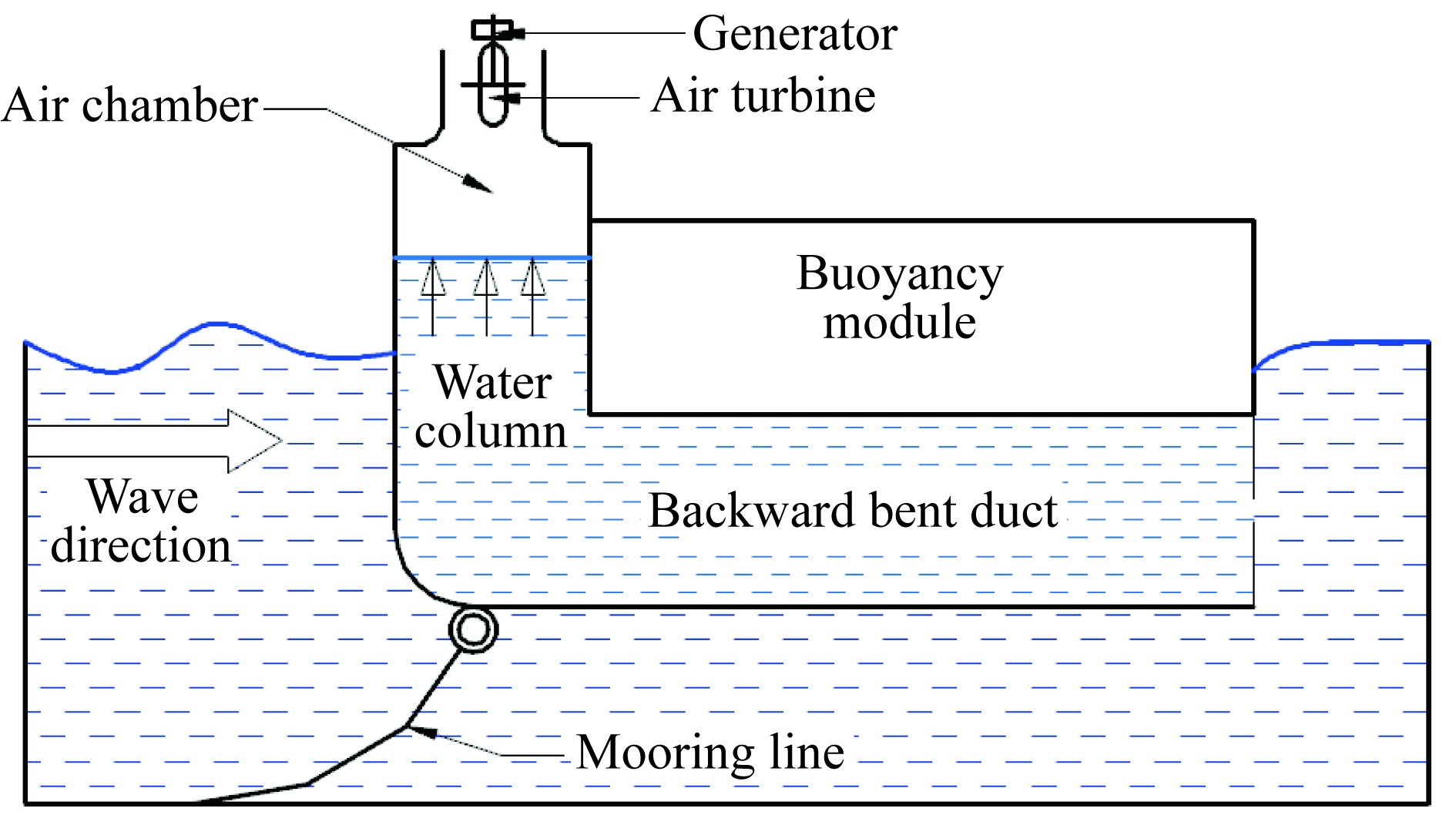
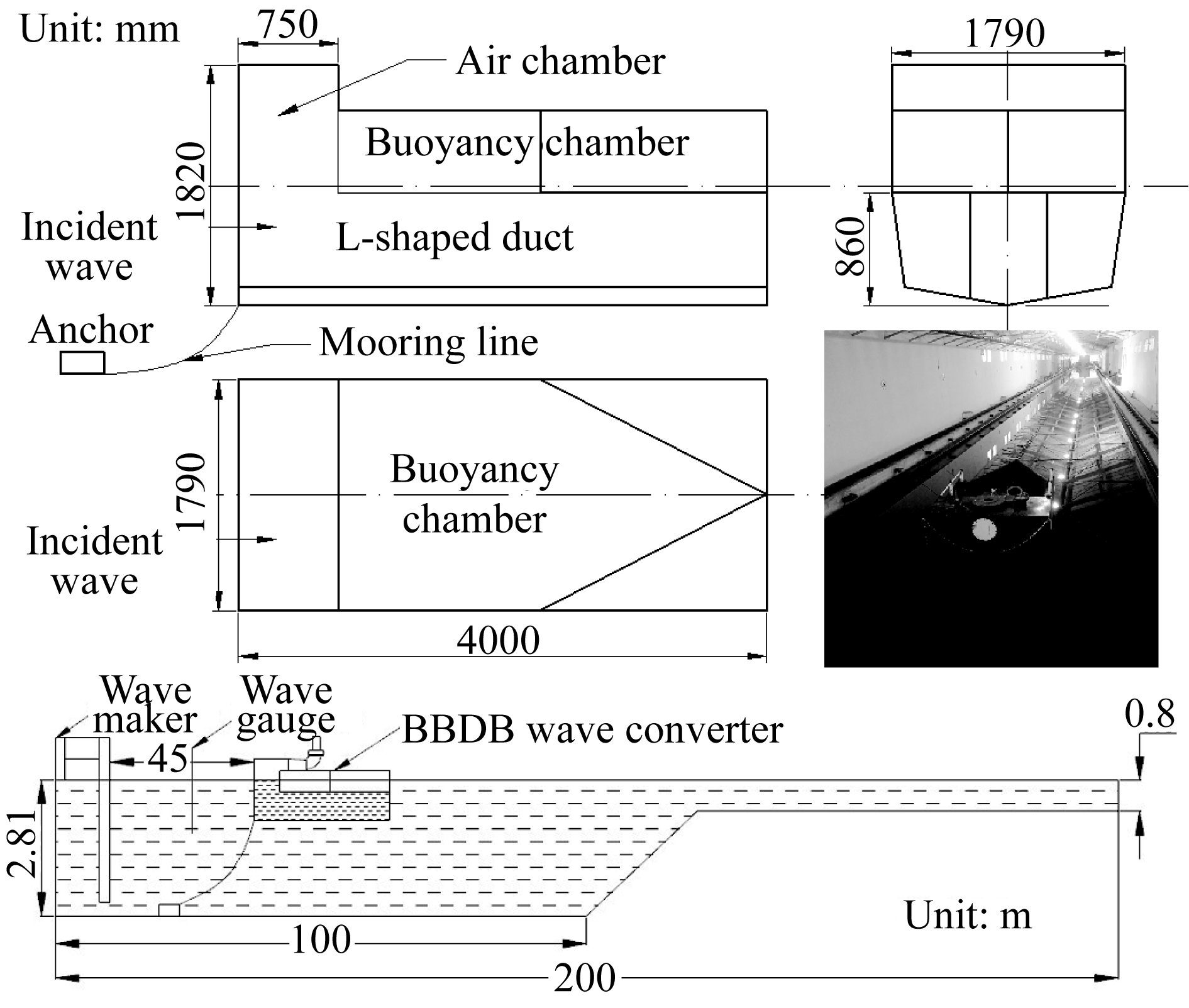
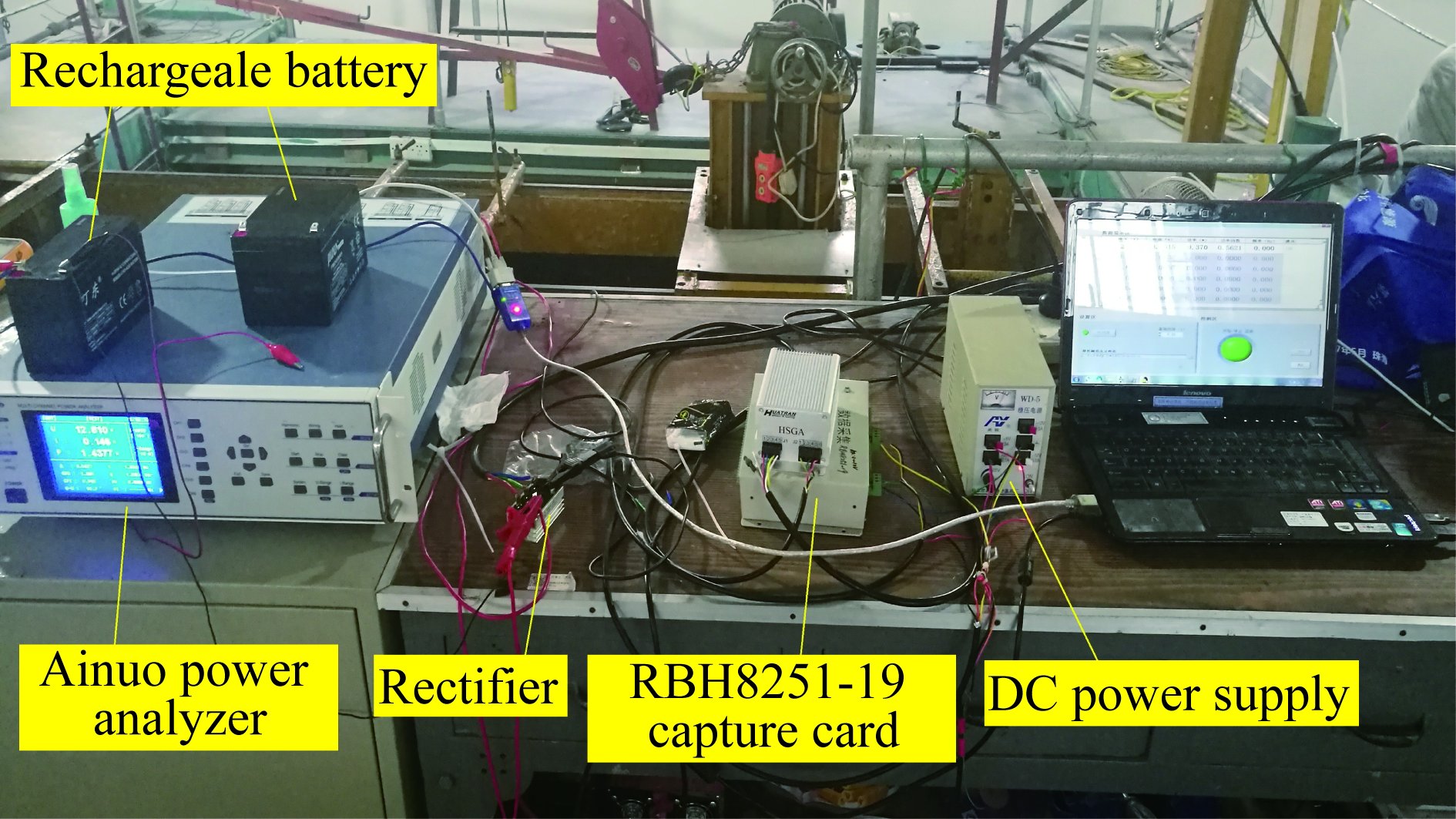
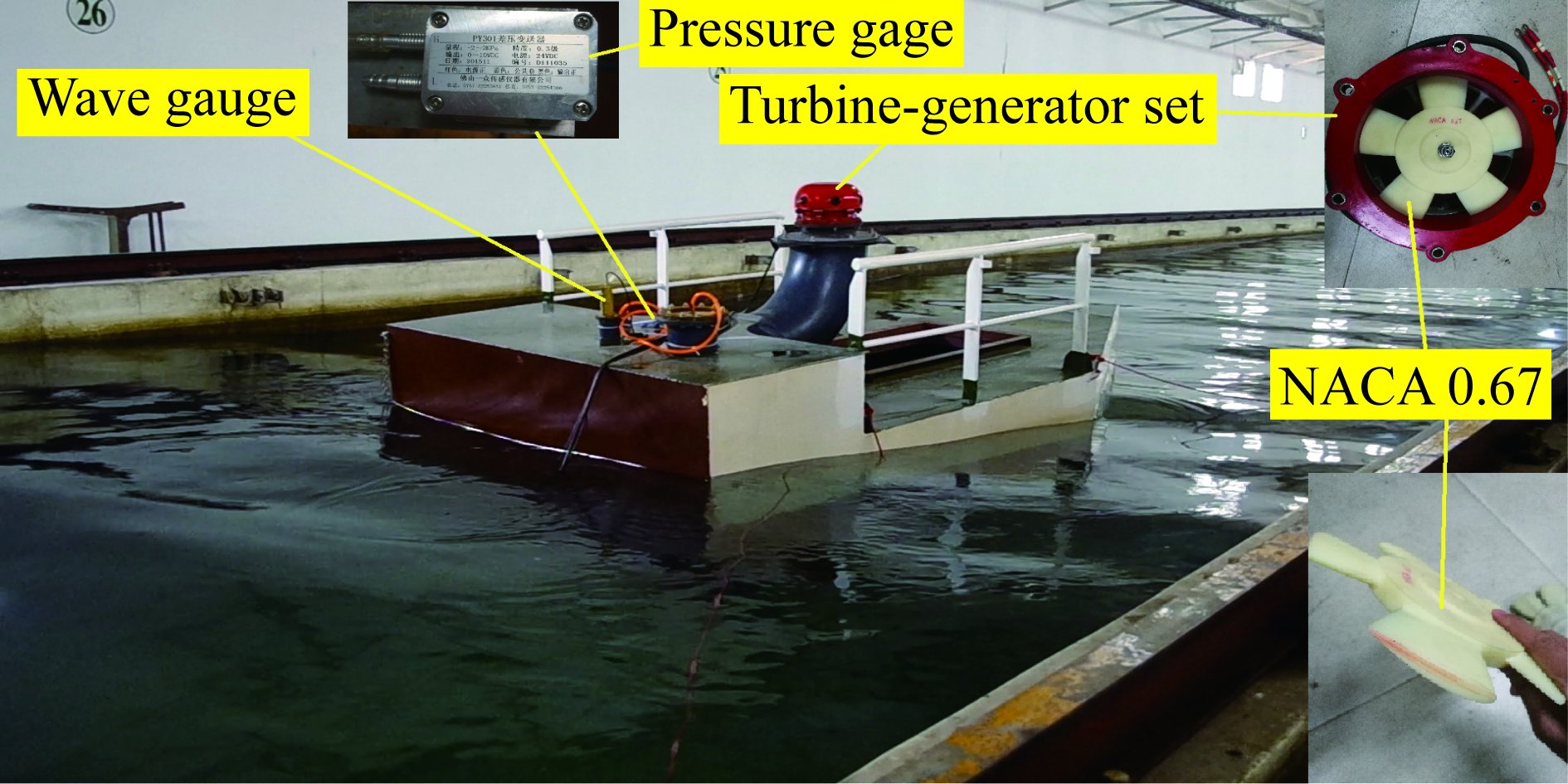
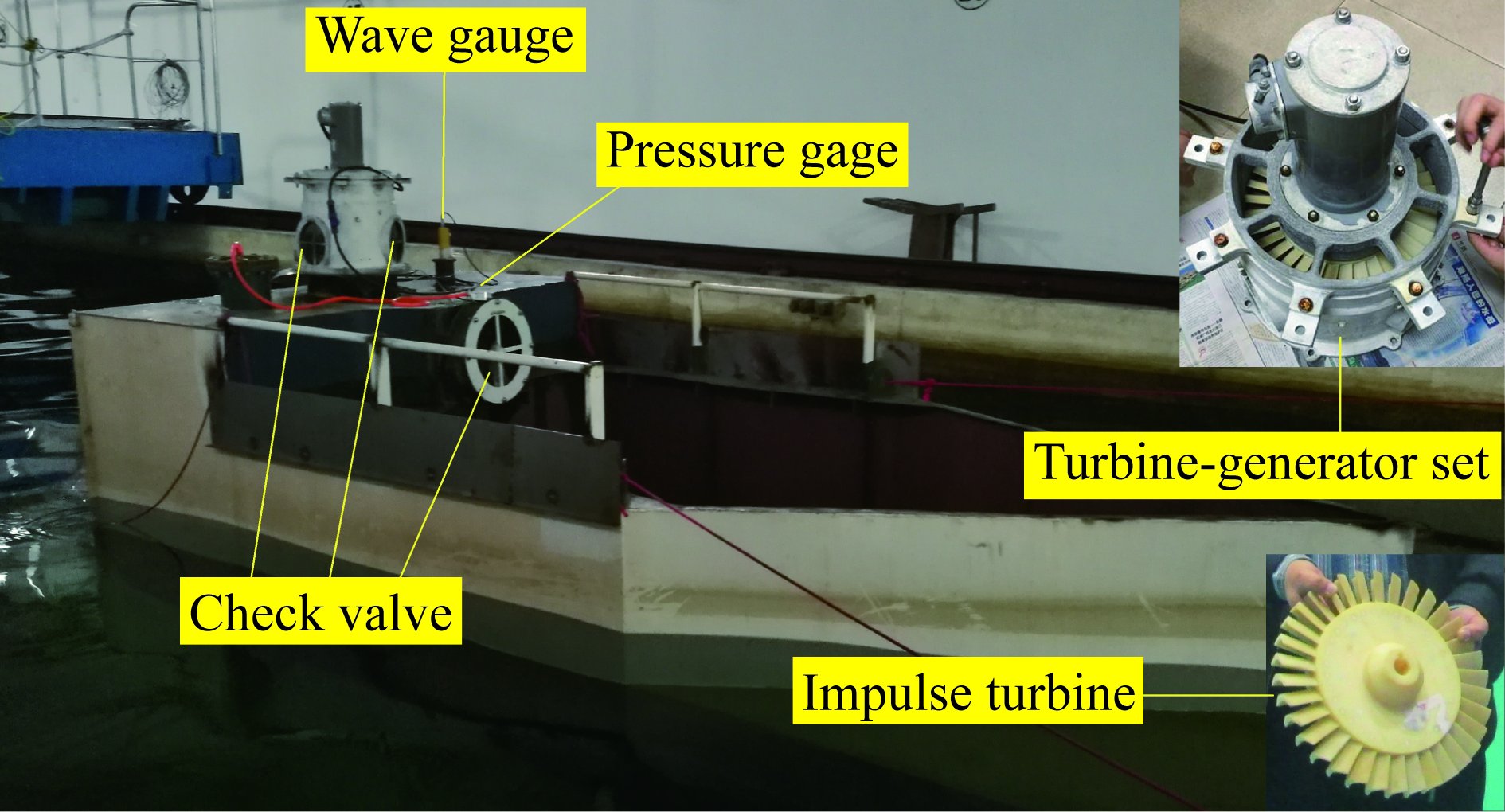
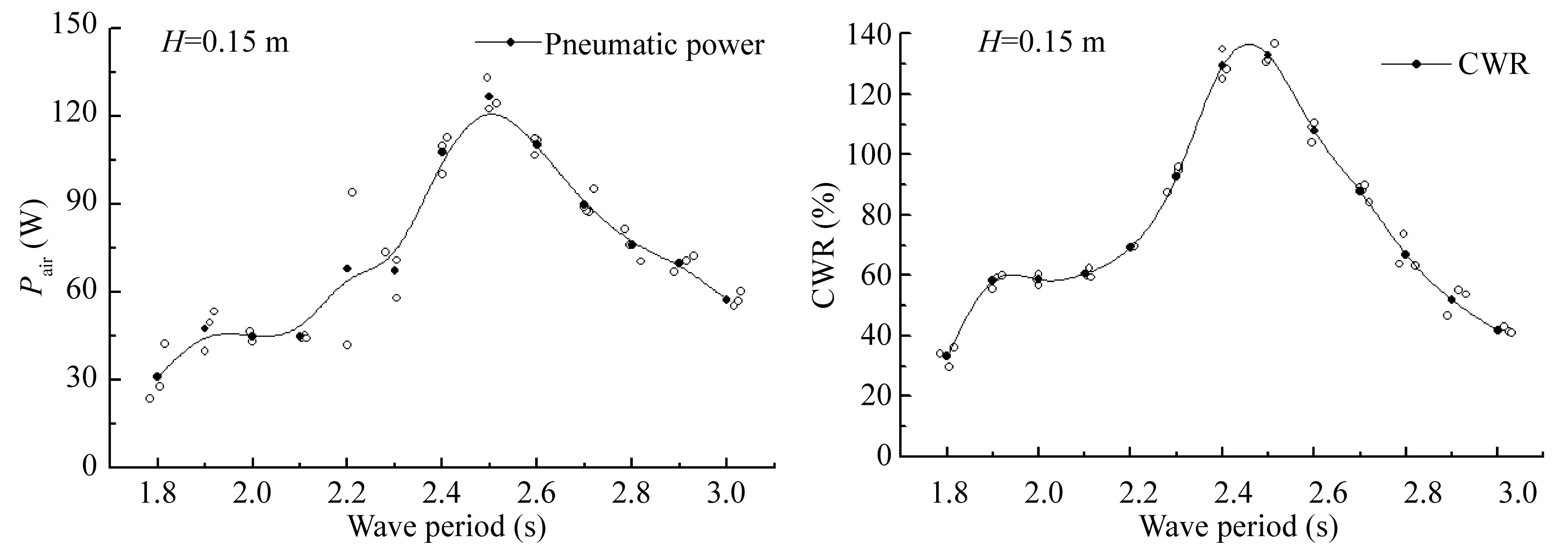
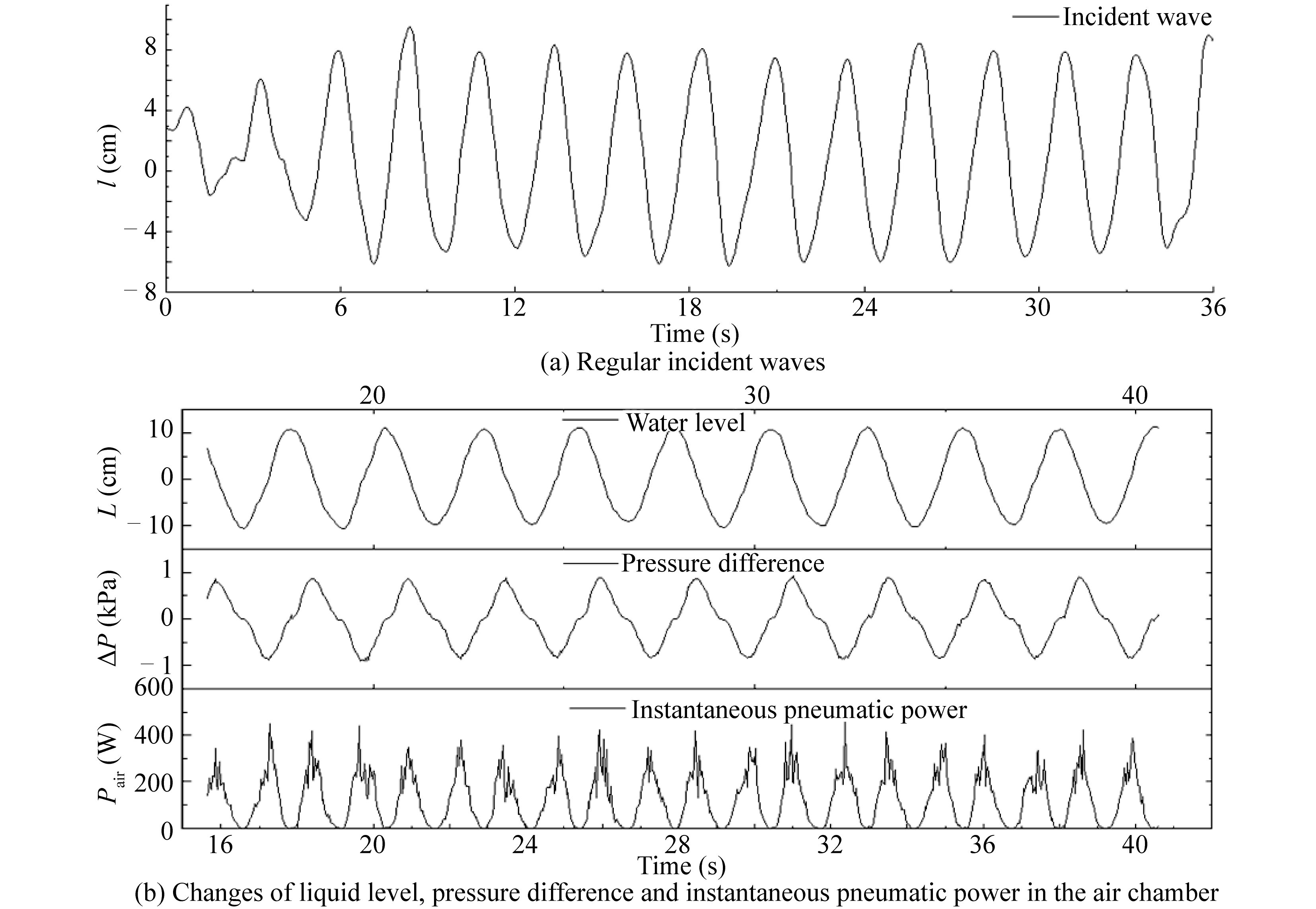
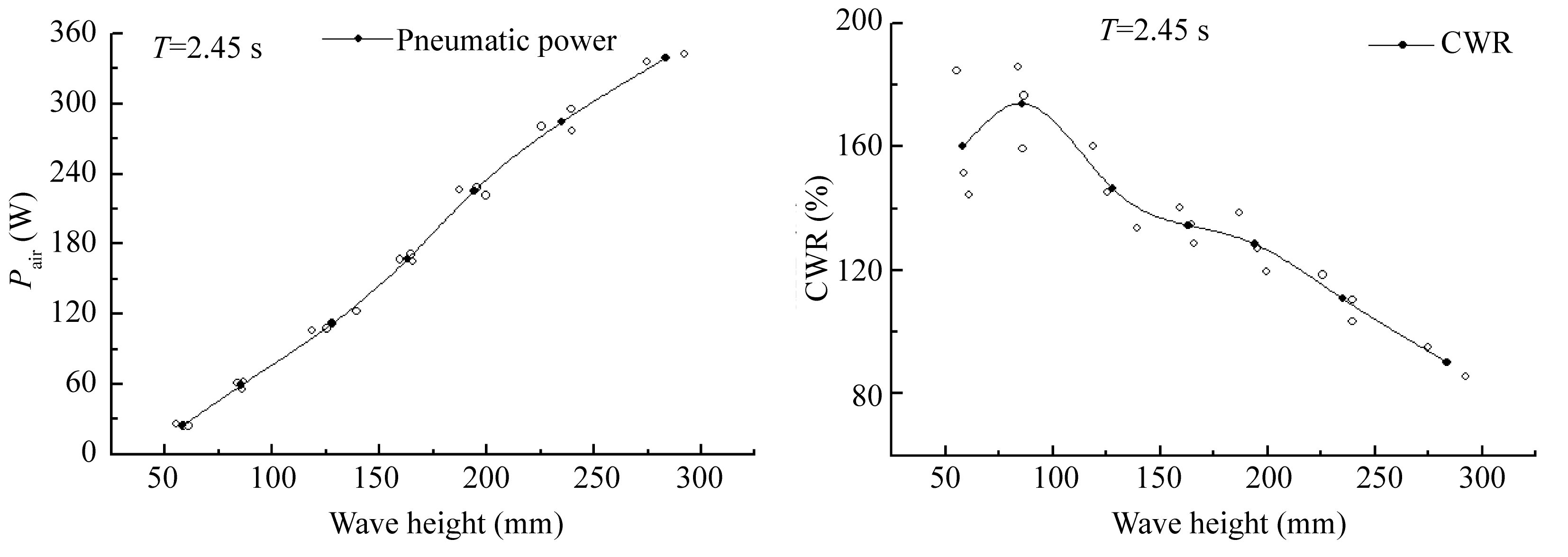
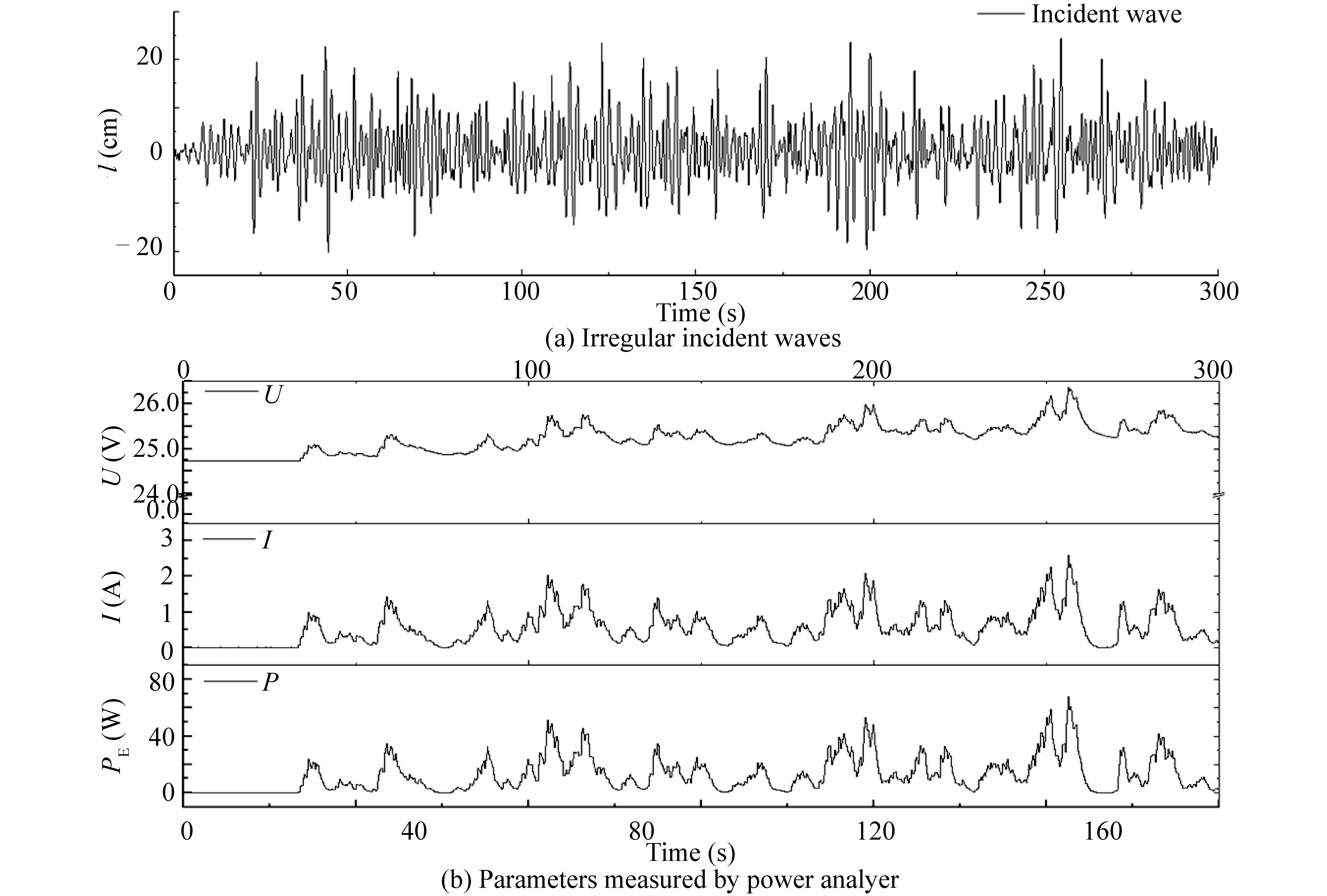
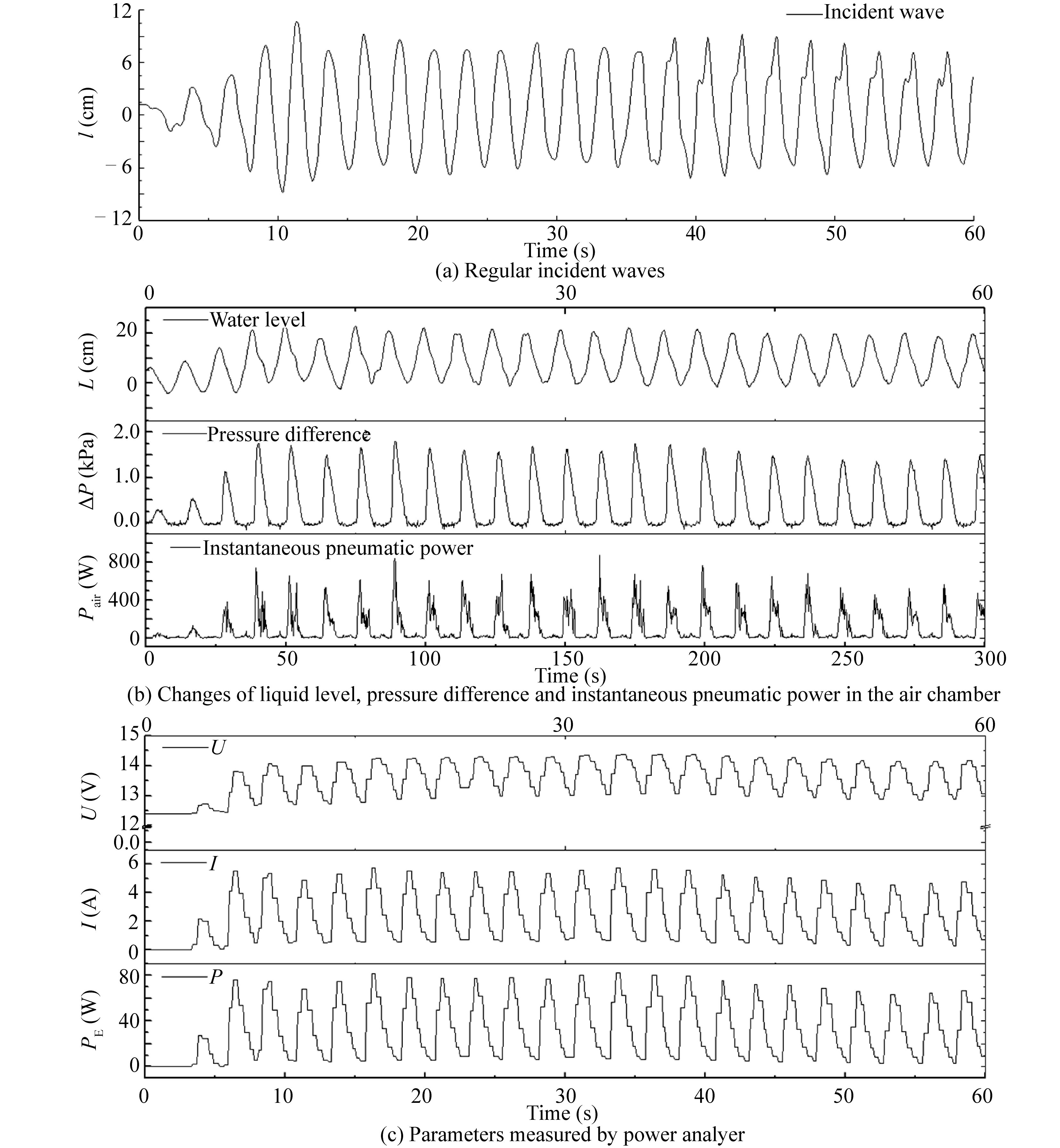
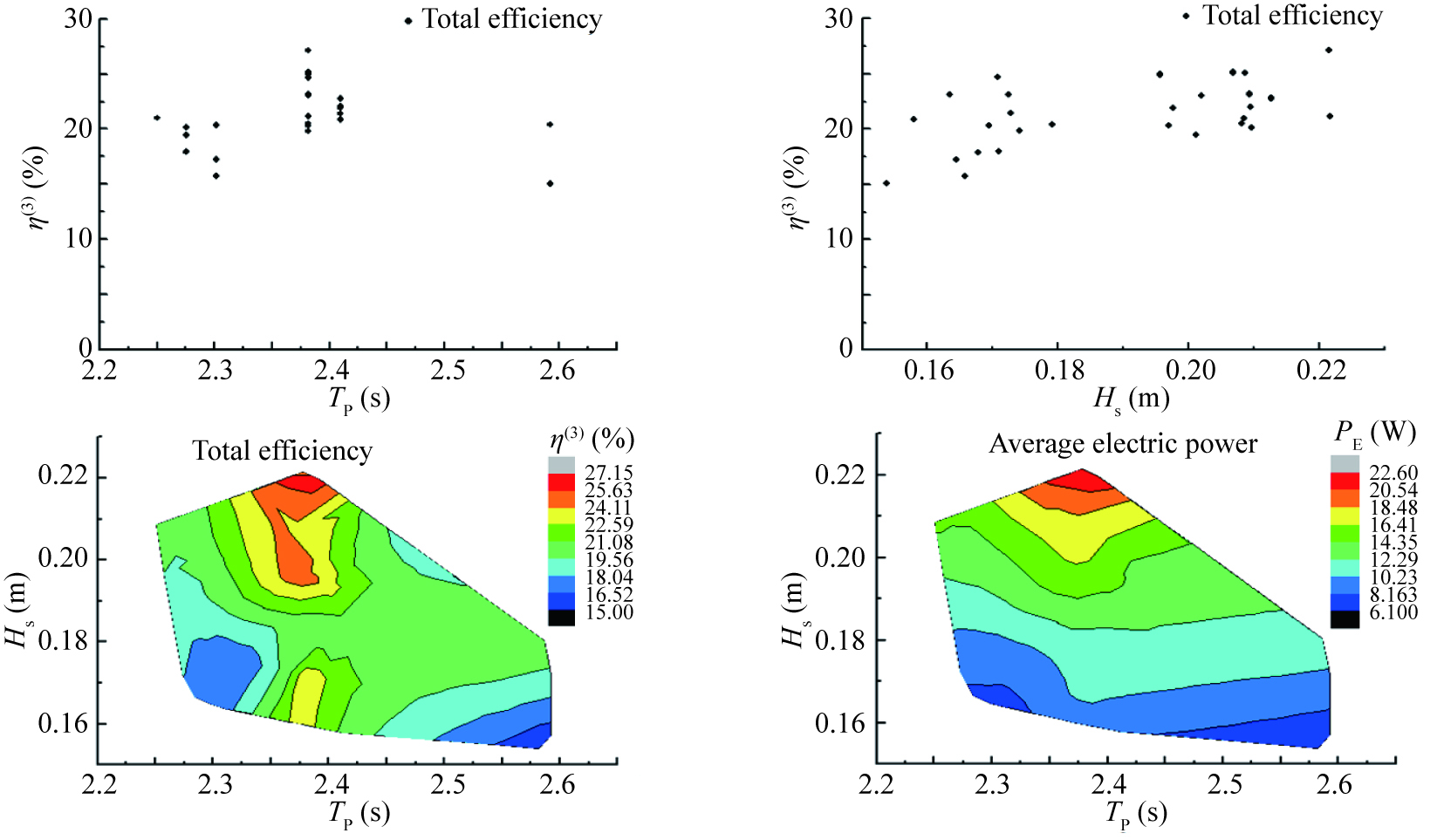
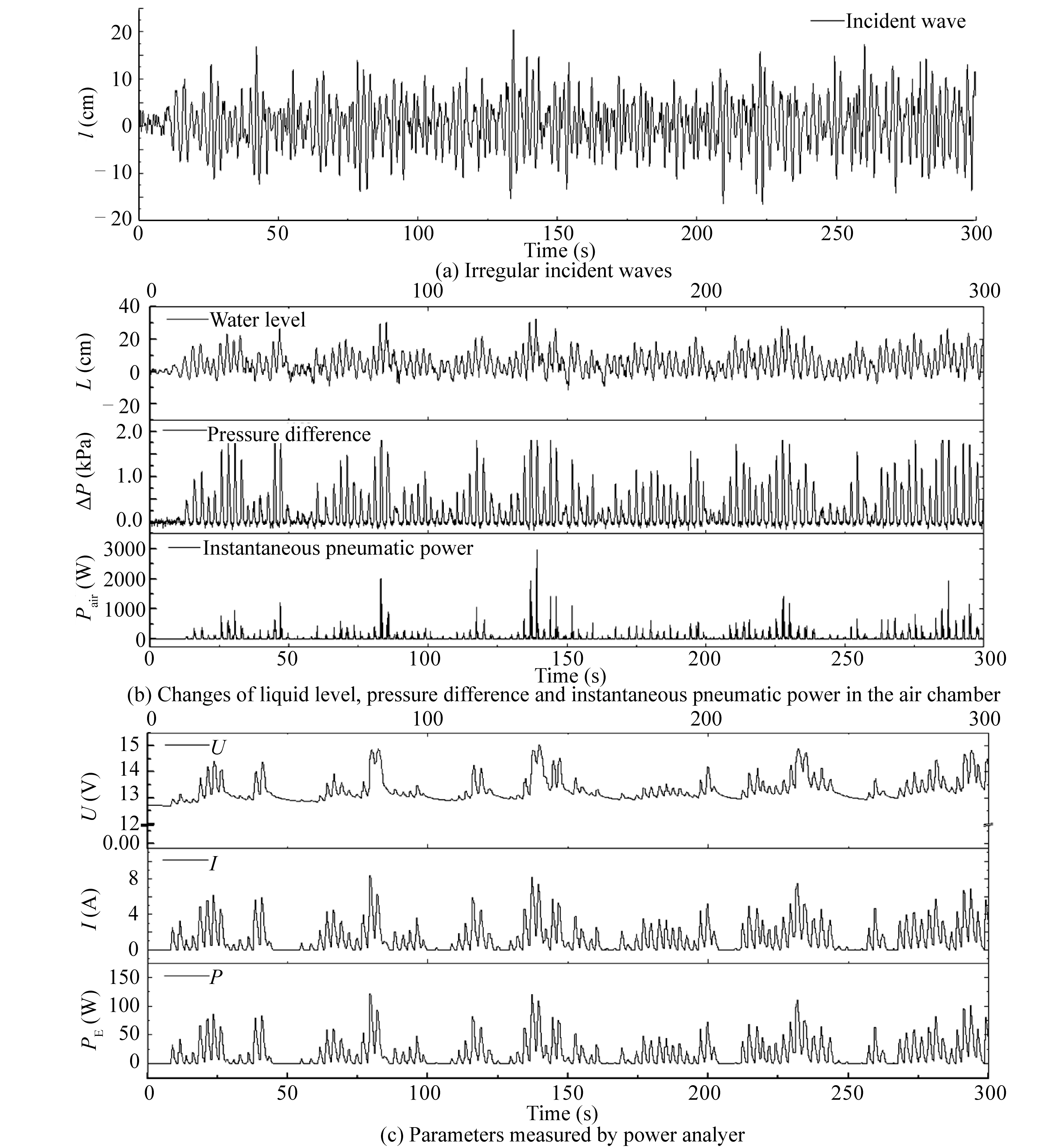
Wave tank tests were carried out to evaluate the total efficiency of a floating OWC Pentagonal Backward Bent Duct Buoy (PBBDB). Two kinds of turbine generators were used in tests. The incident wave power, pneumatic power and electricity were measured. The test results show that the primary efficiency can reach up to 185.98% in regular waves and 85.86% in irregular waves. The total efficiency from wave to wire with Wells turbine-generator set is 33.43% in regular waves and 15.82% in irregular waves. The peak total efficiency of the PBBDB with check valves equipped with the impulse turbine-generator set is 41.68% in regular waves and 27.10% in irregular waves. The efficiency of the turbine-generator set is about 30% in the tests. Obviously, the total efficiency can be further improved with the increasing of turbine efficiency.
Wave tank tests were carried out to evaluate the total efficiency of a floating OWC Pentagonal Backward Bent Duct Buoy (PBBDB). Two kinds of turbine generators were used in tests. The incident wave power, pneumatic power and electricity were measured. The test results show that the primary efficiency can reach up to 185.98% in regular waves and 85.86% in irregular waves. The total efficiency from wave to wire with Wells turbine-generator set is 33.43% in regular waves and 15.82% in irregular waves. The peak total efficiency of the PBBDB with check valves equipped with the impulse turbine-generator set is 41.68% in regular waves and 27.10% in irregular waves. The efficiency of the turbine-generator set is about 30% in the tests. Obviously, the total efficiency can be further improved with the increasing of turbine efficiency.
2019, 33(3): 309-321.
doi: 10.1007/s13344-019-0030-8
Abstract:
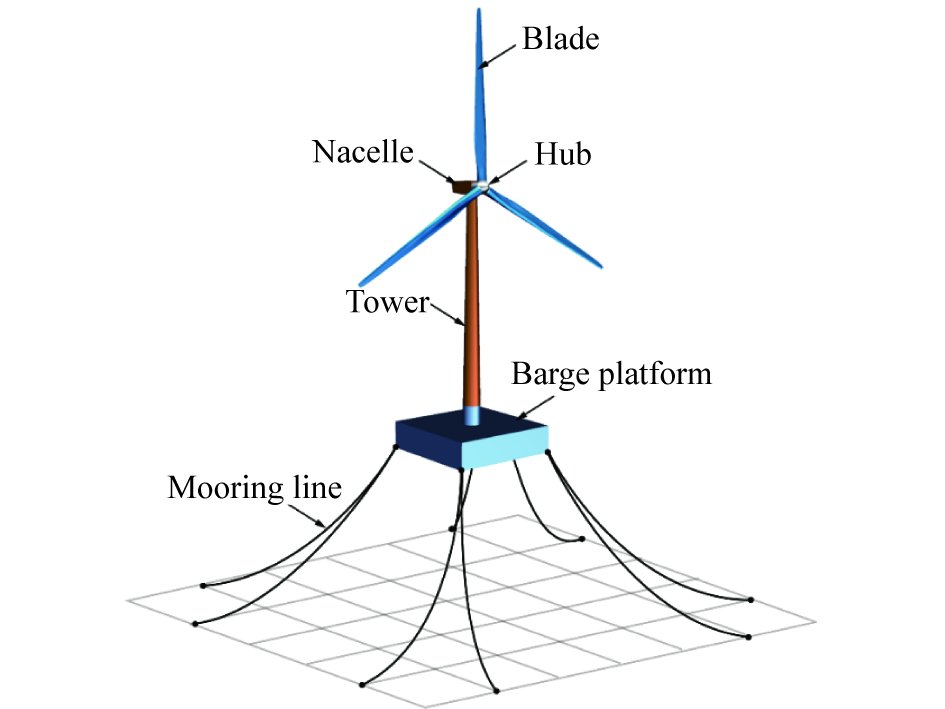
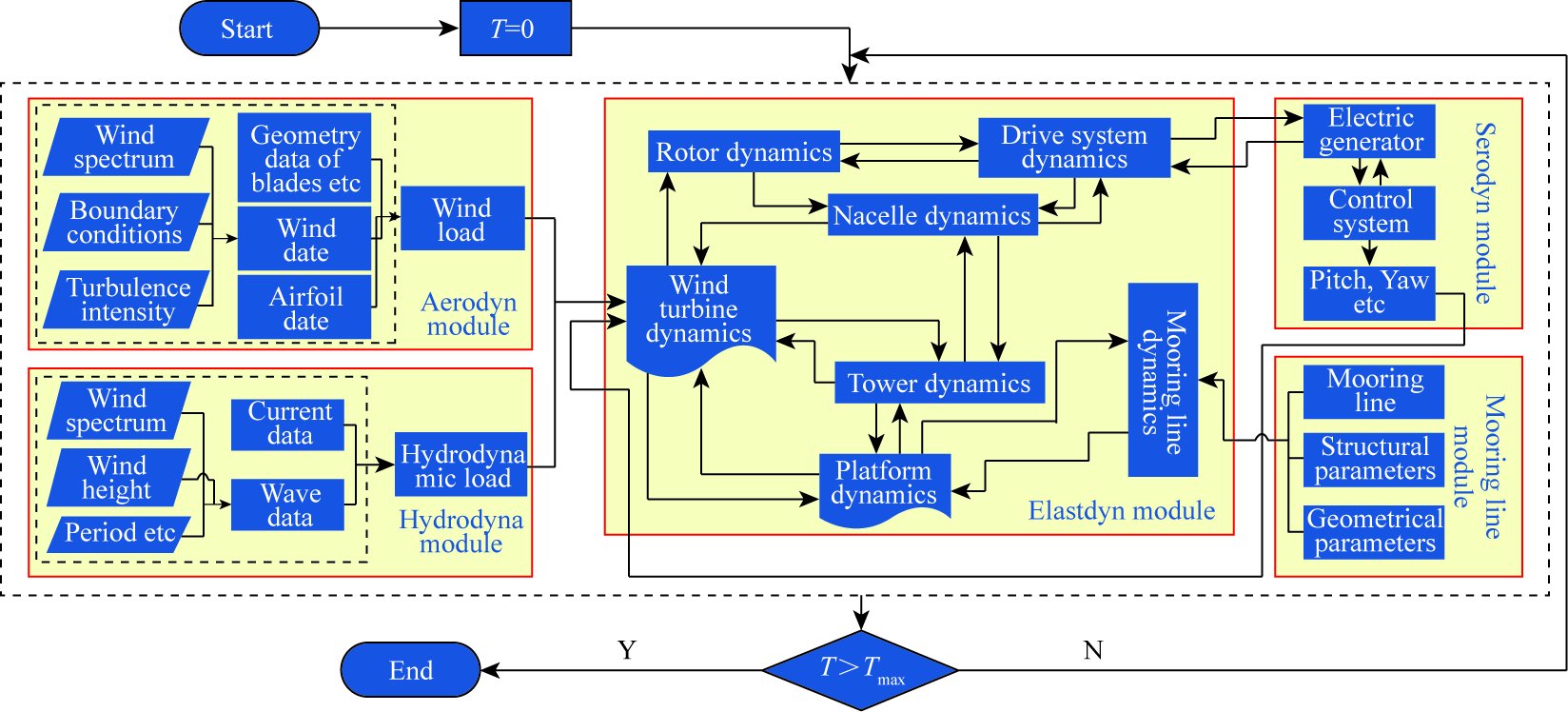
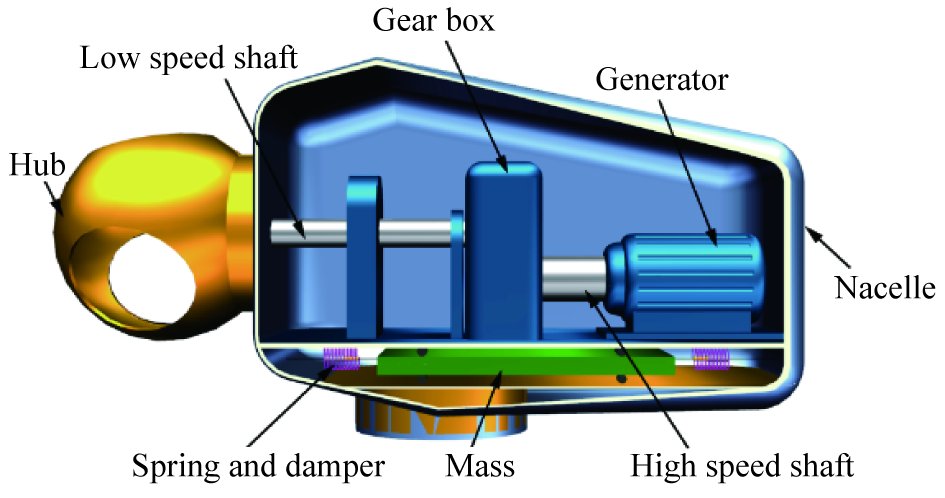
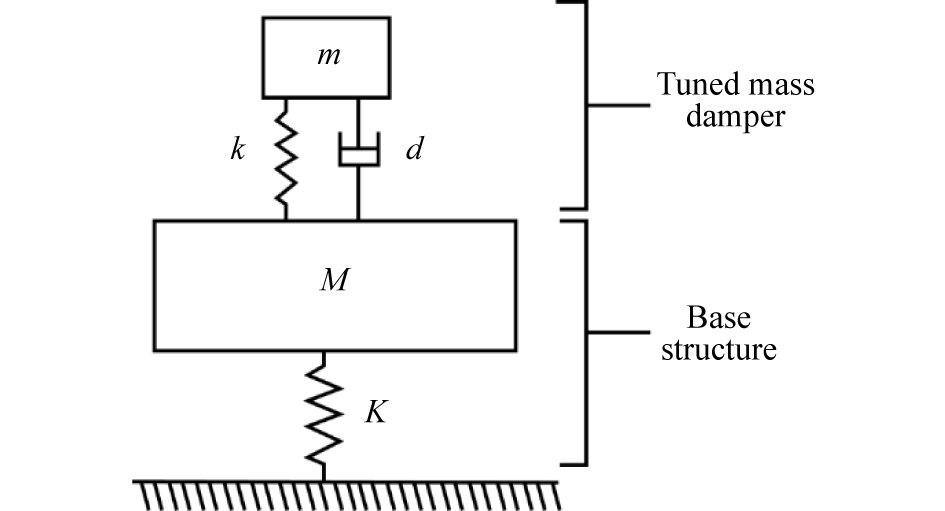
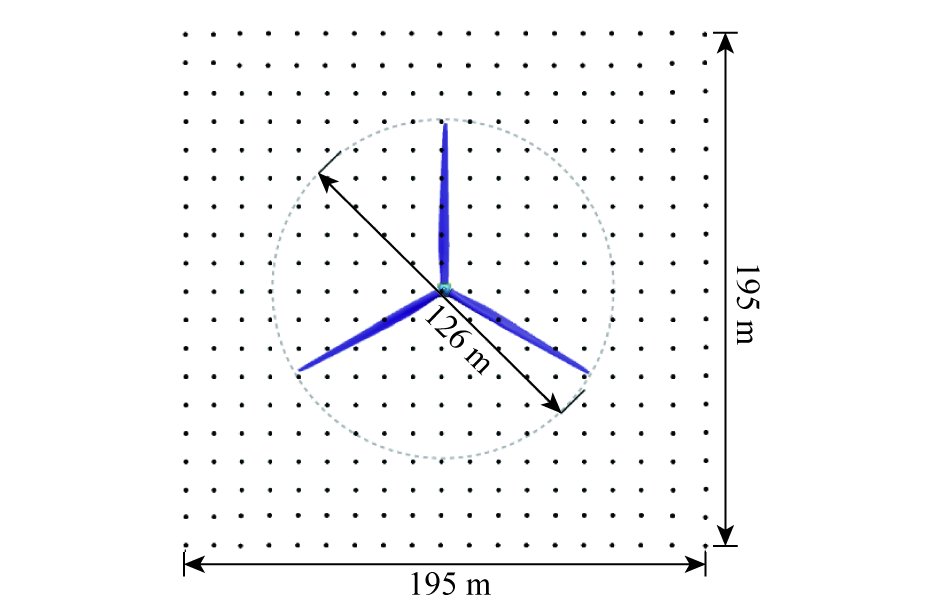
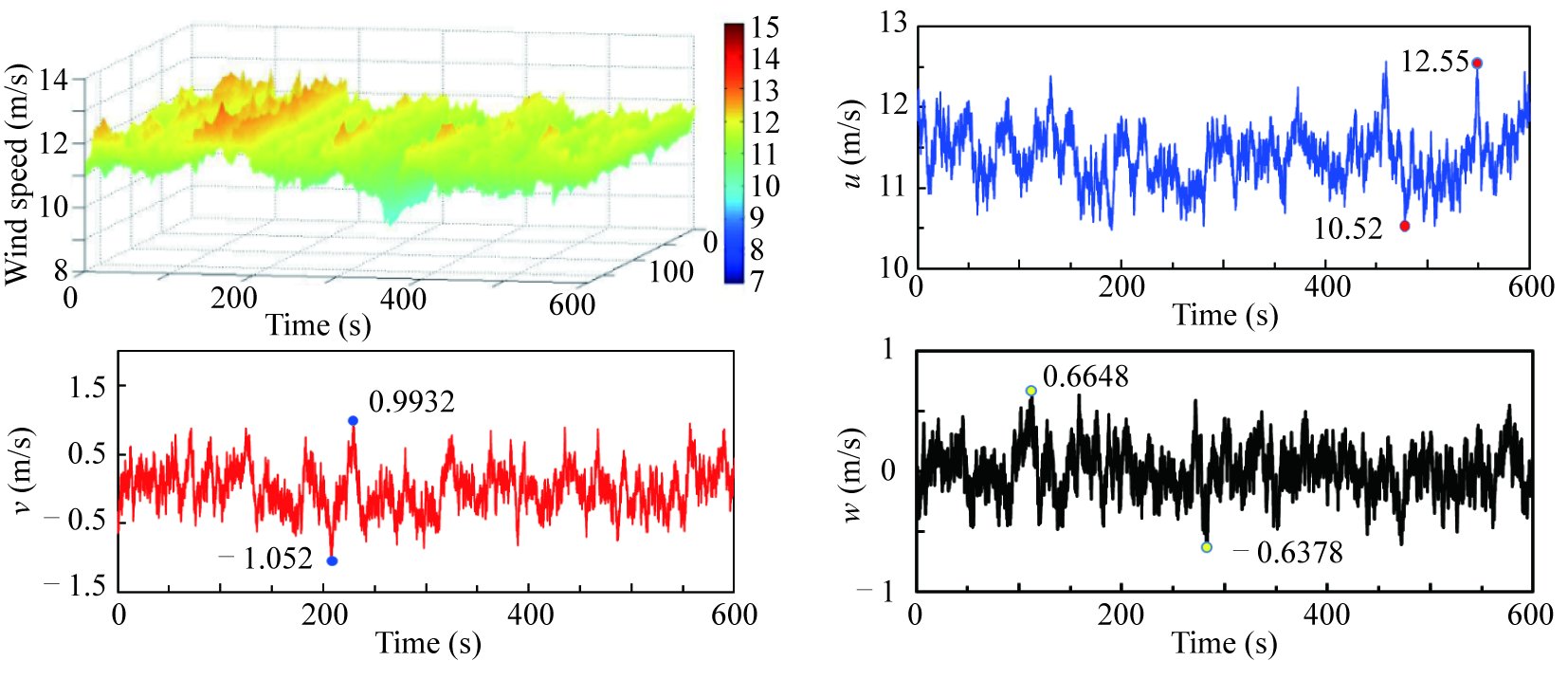
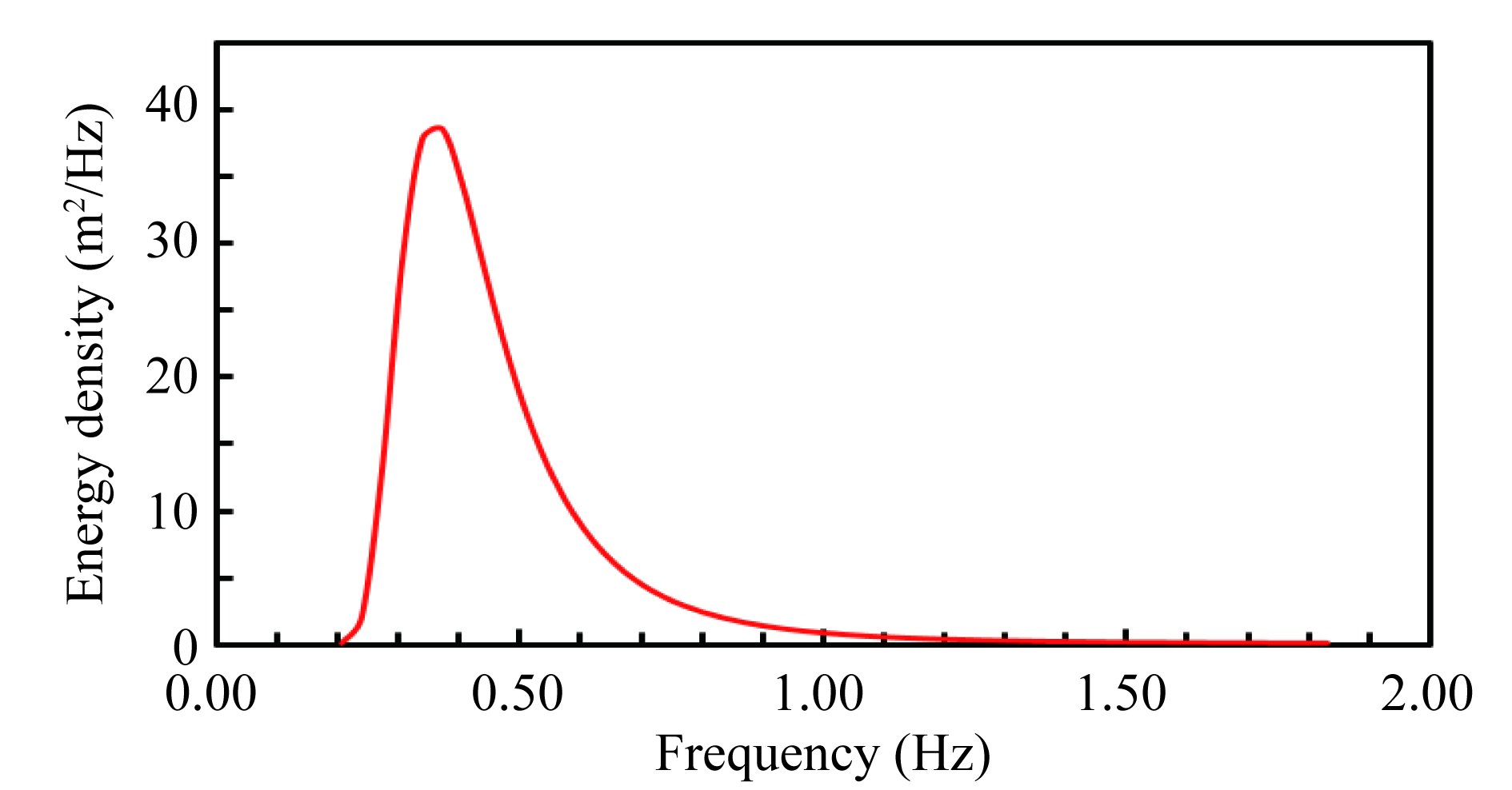
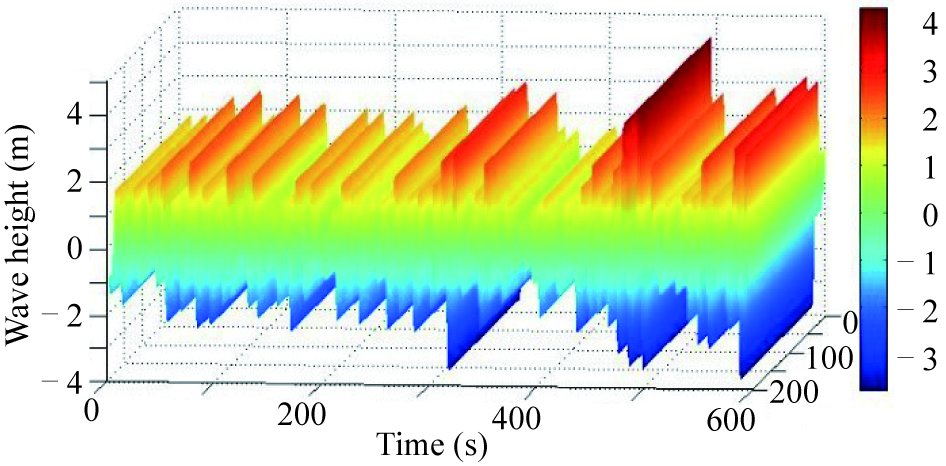
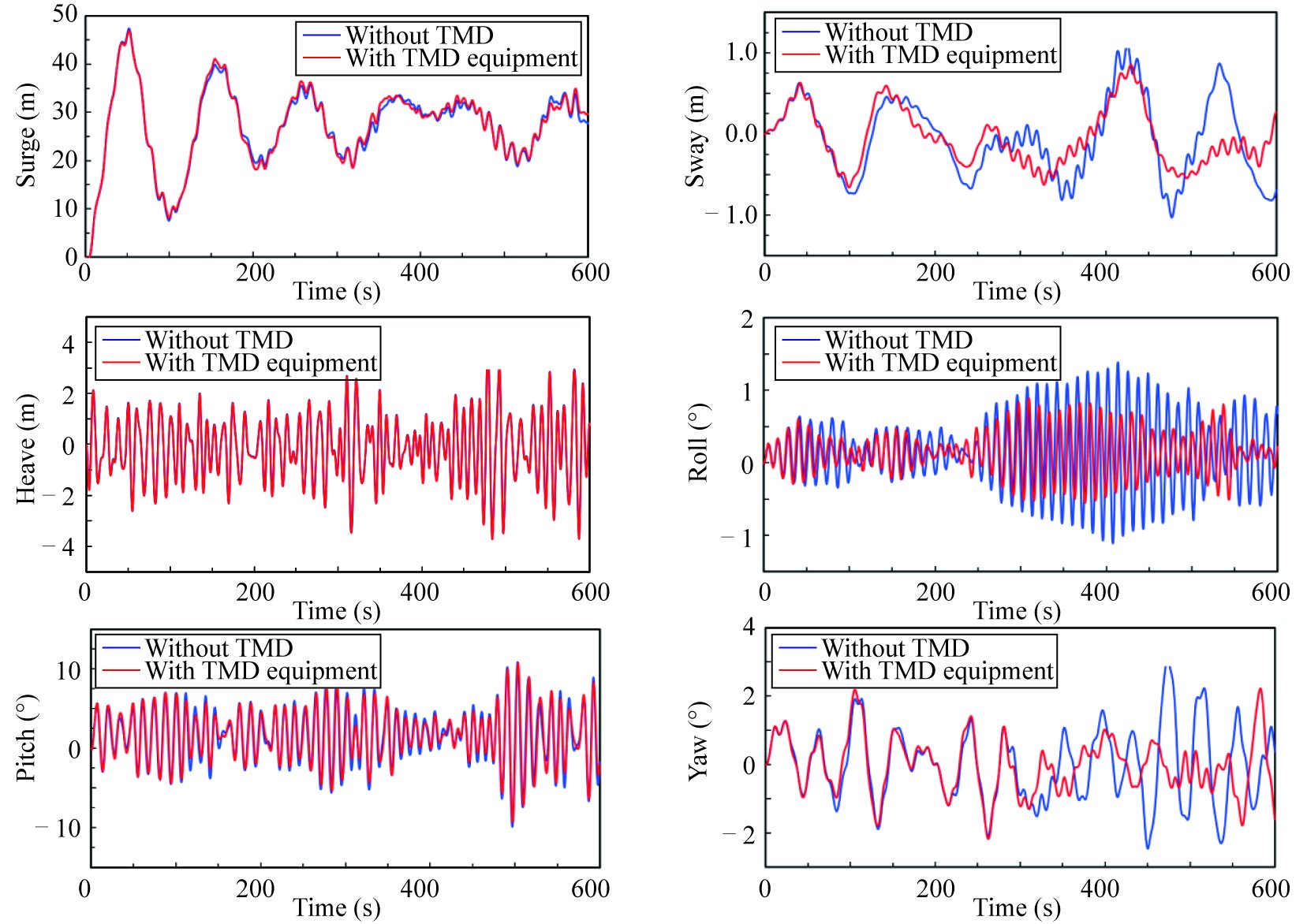
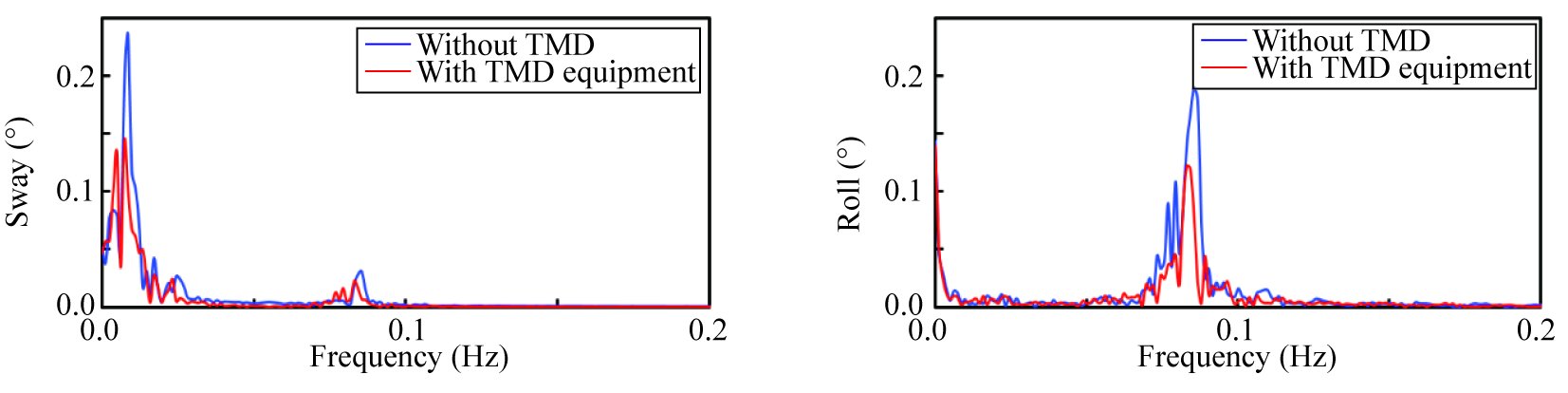
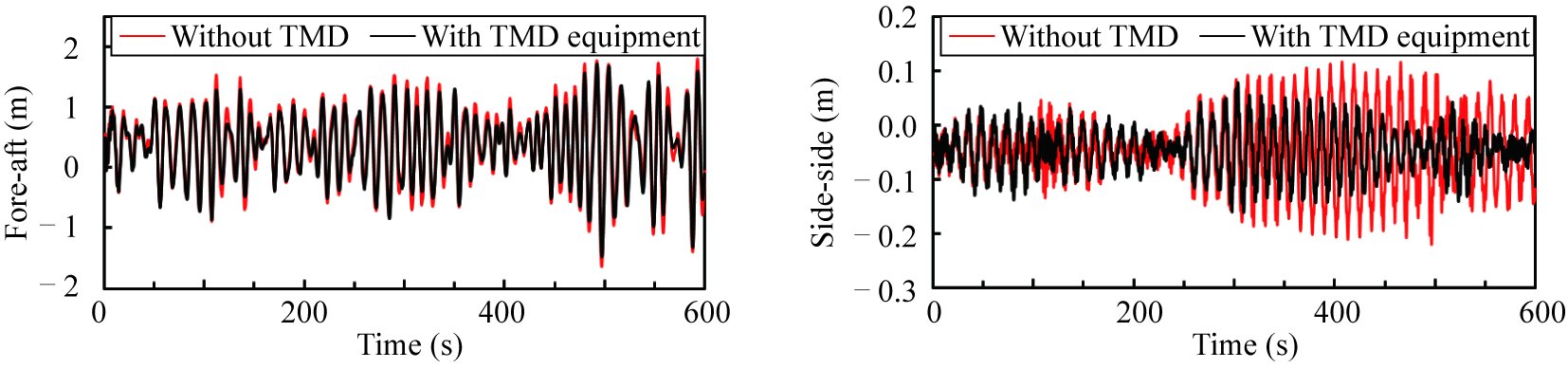
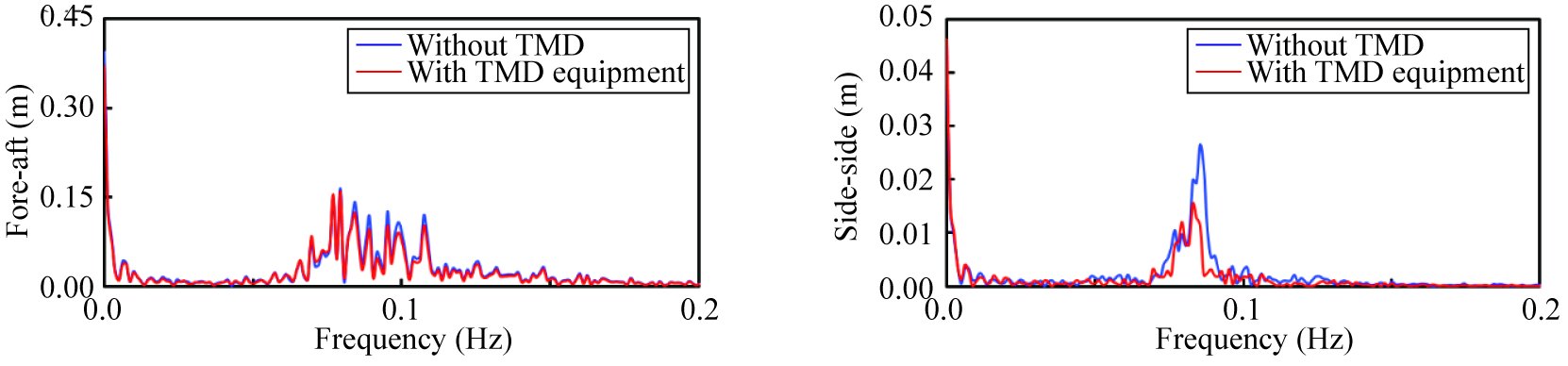
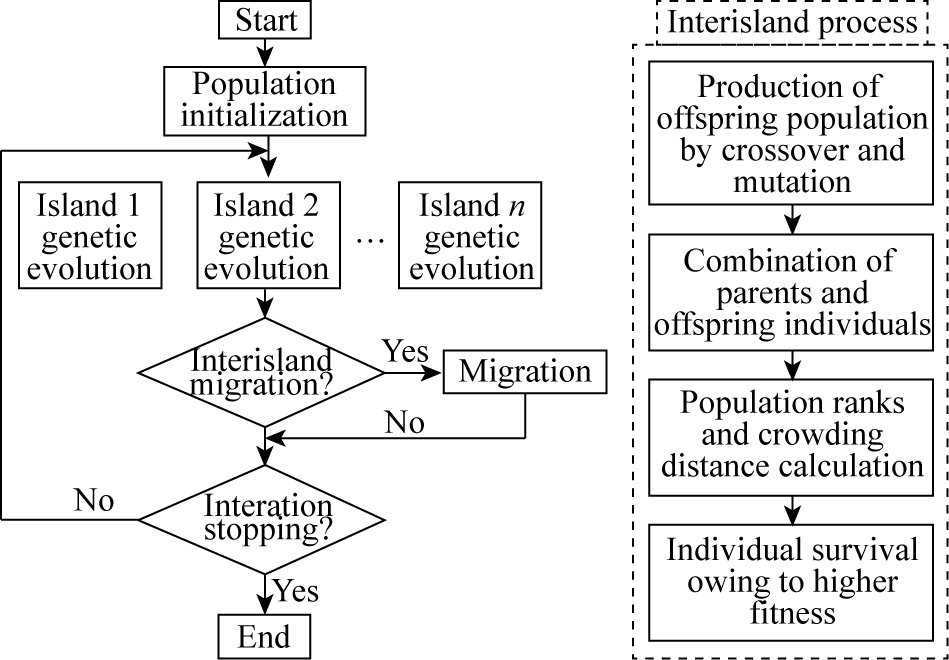
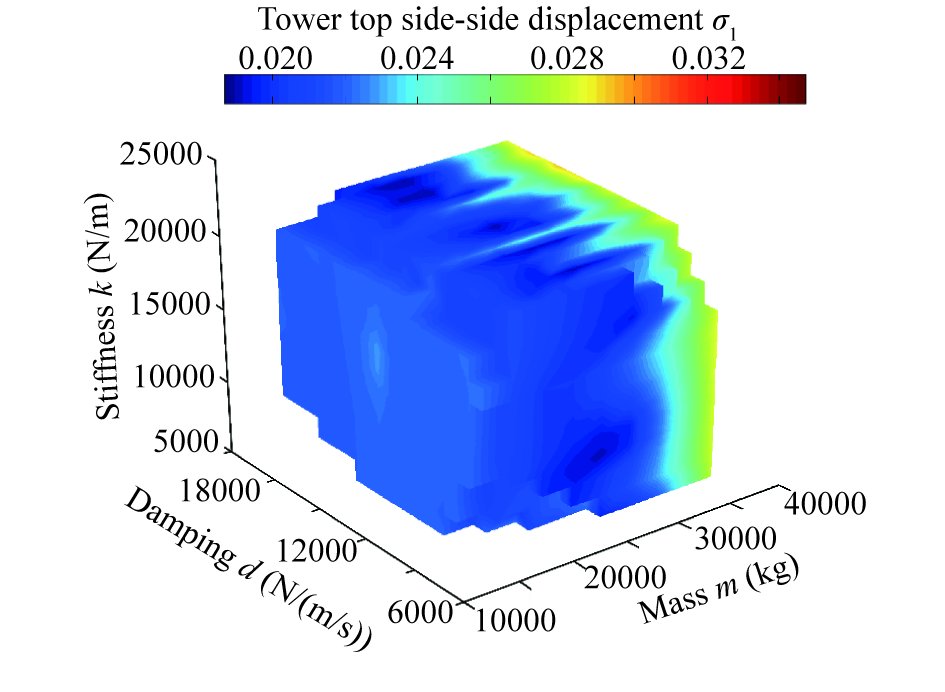
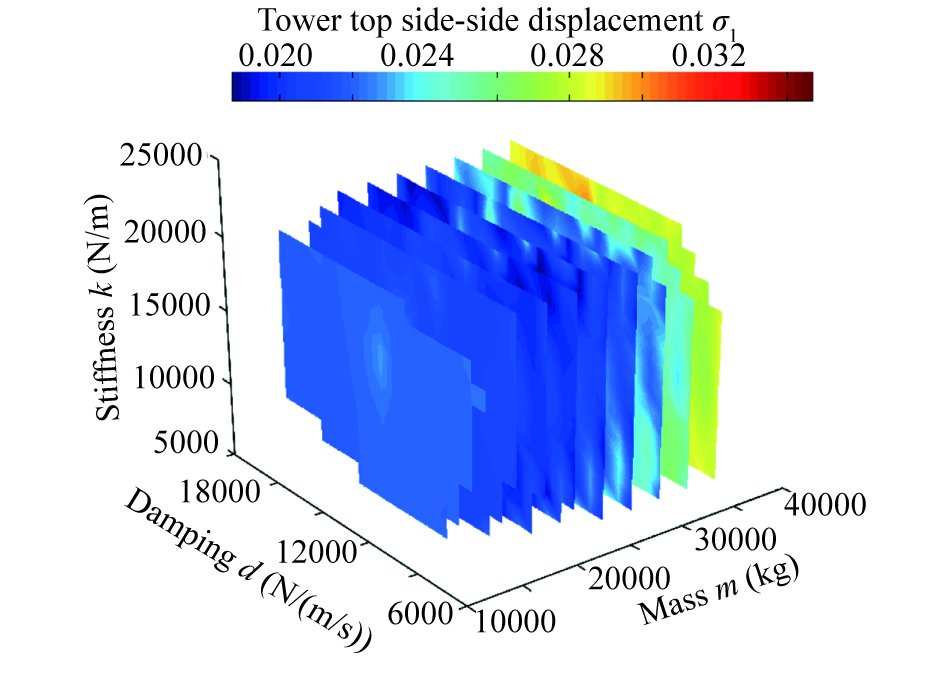
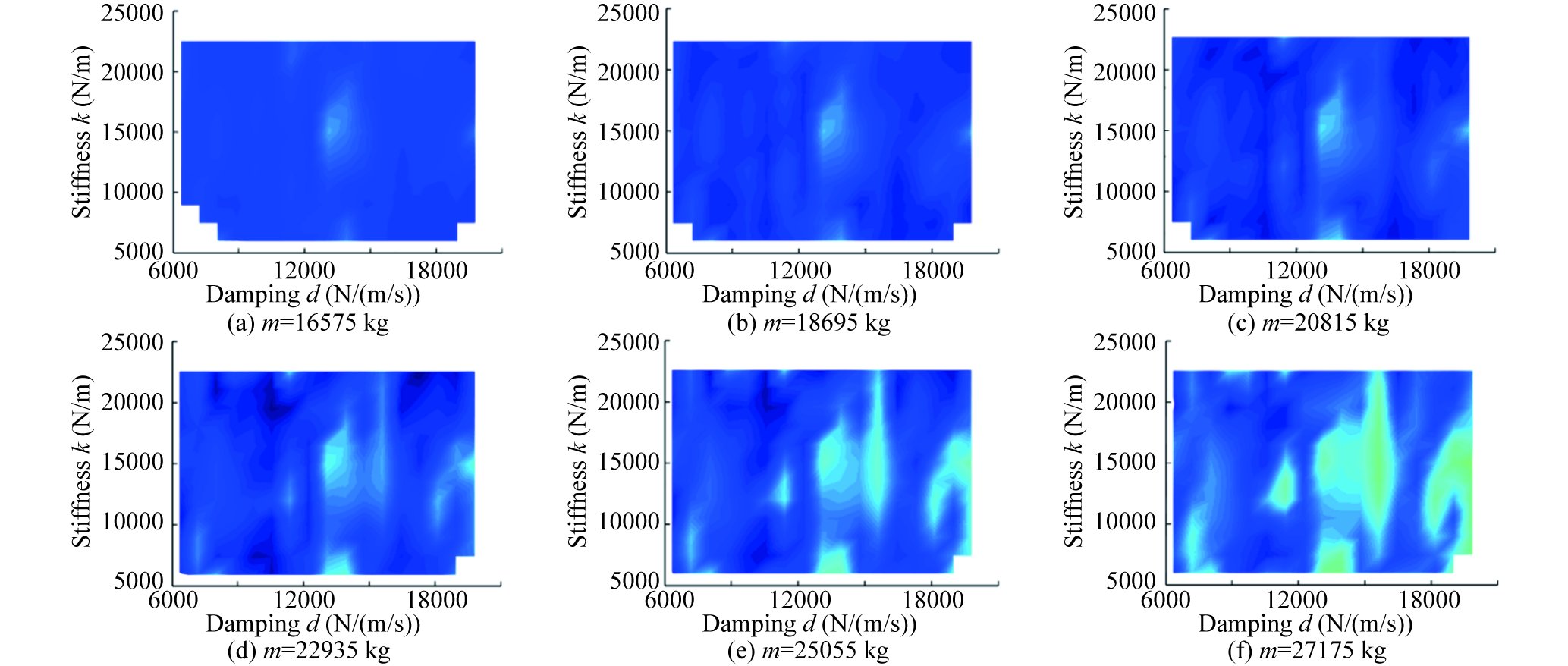
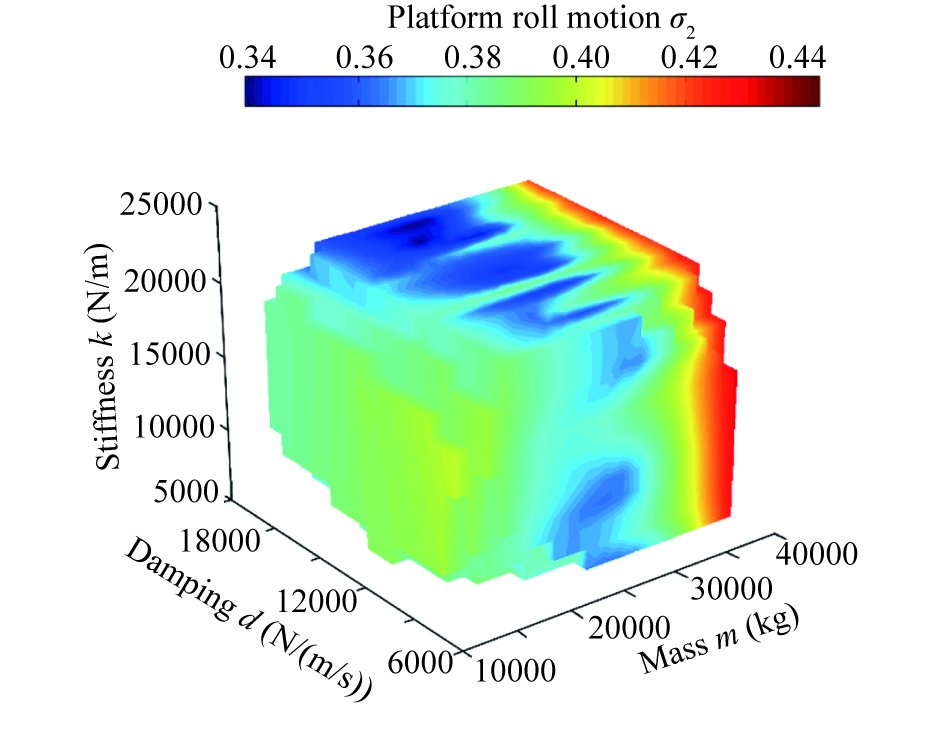
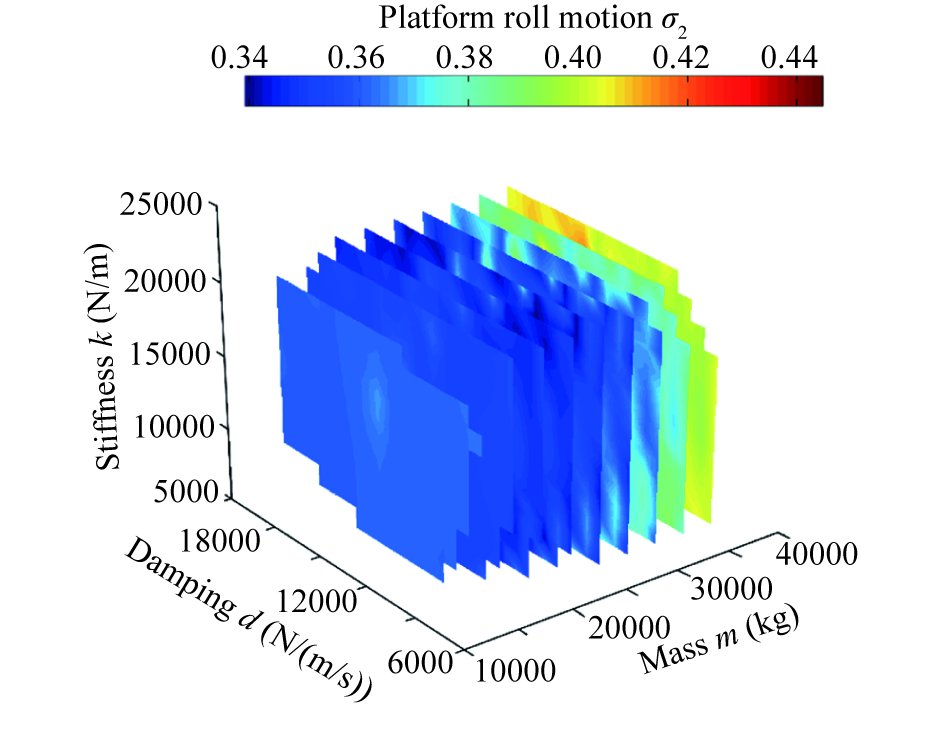
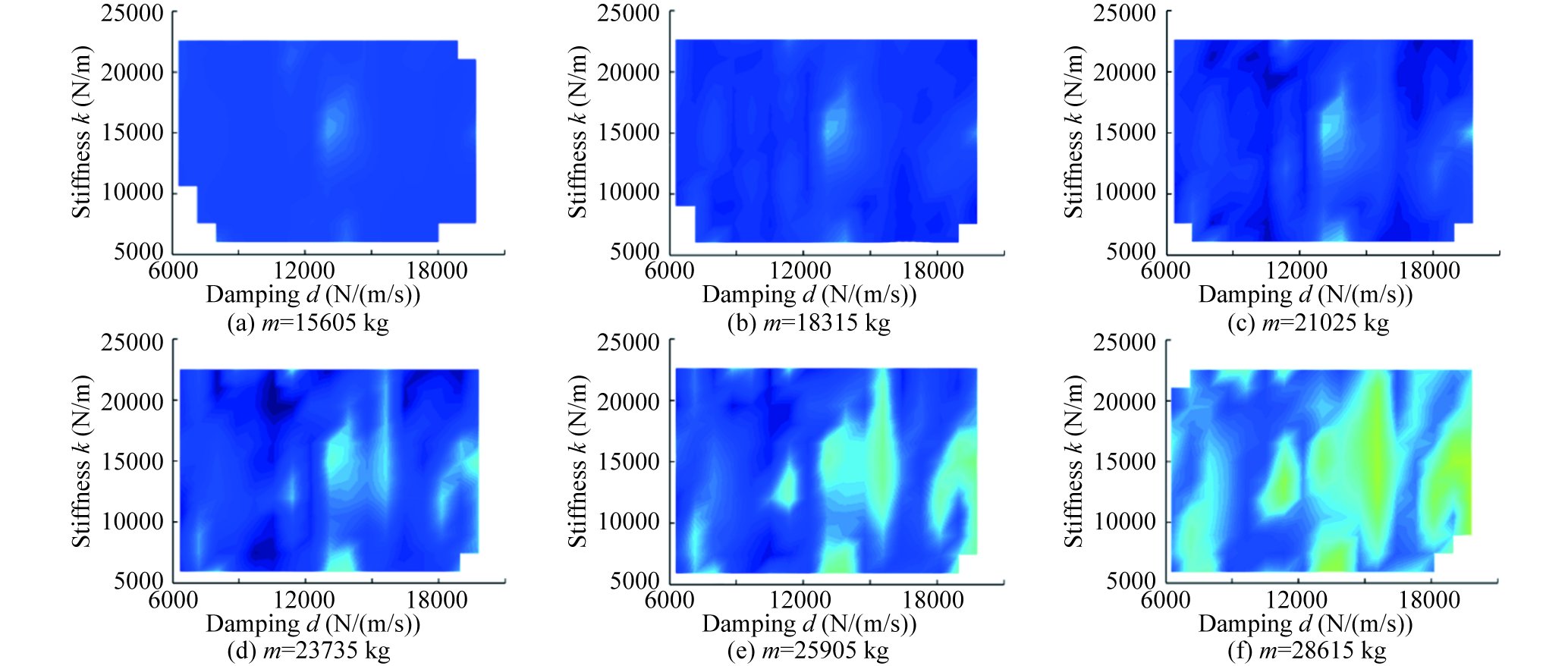
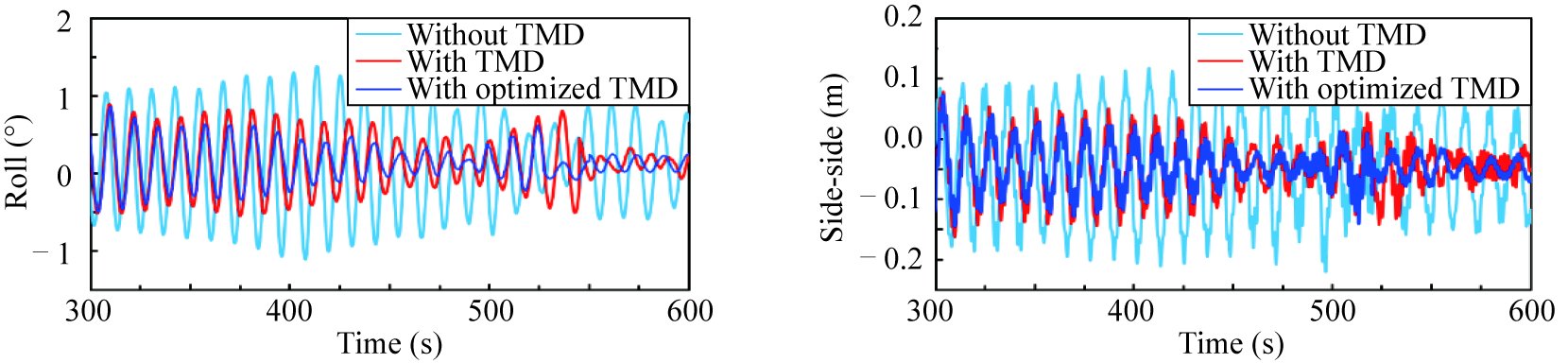
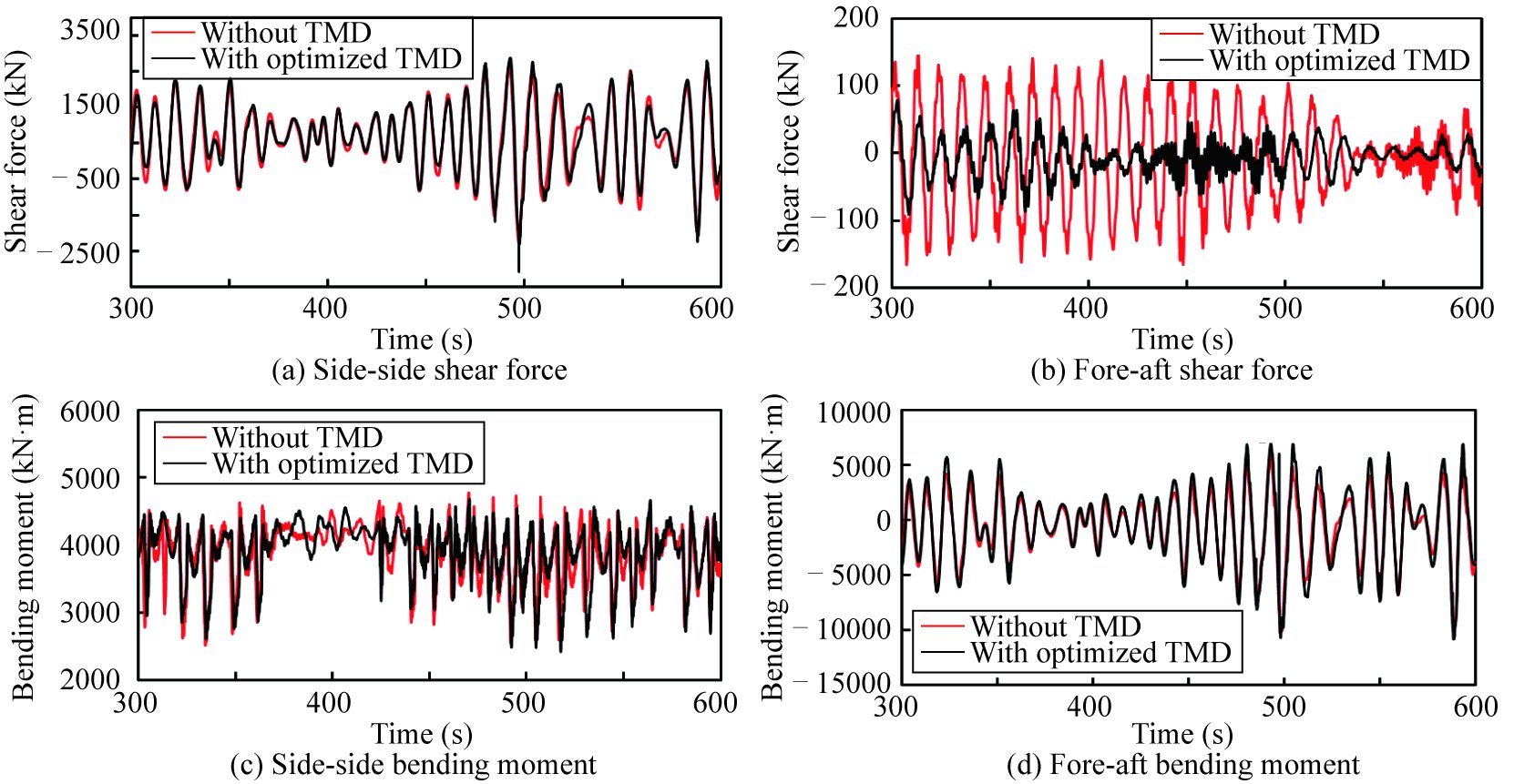
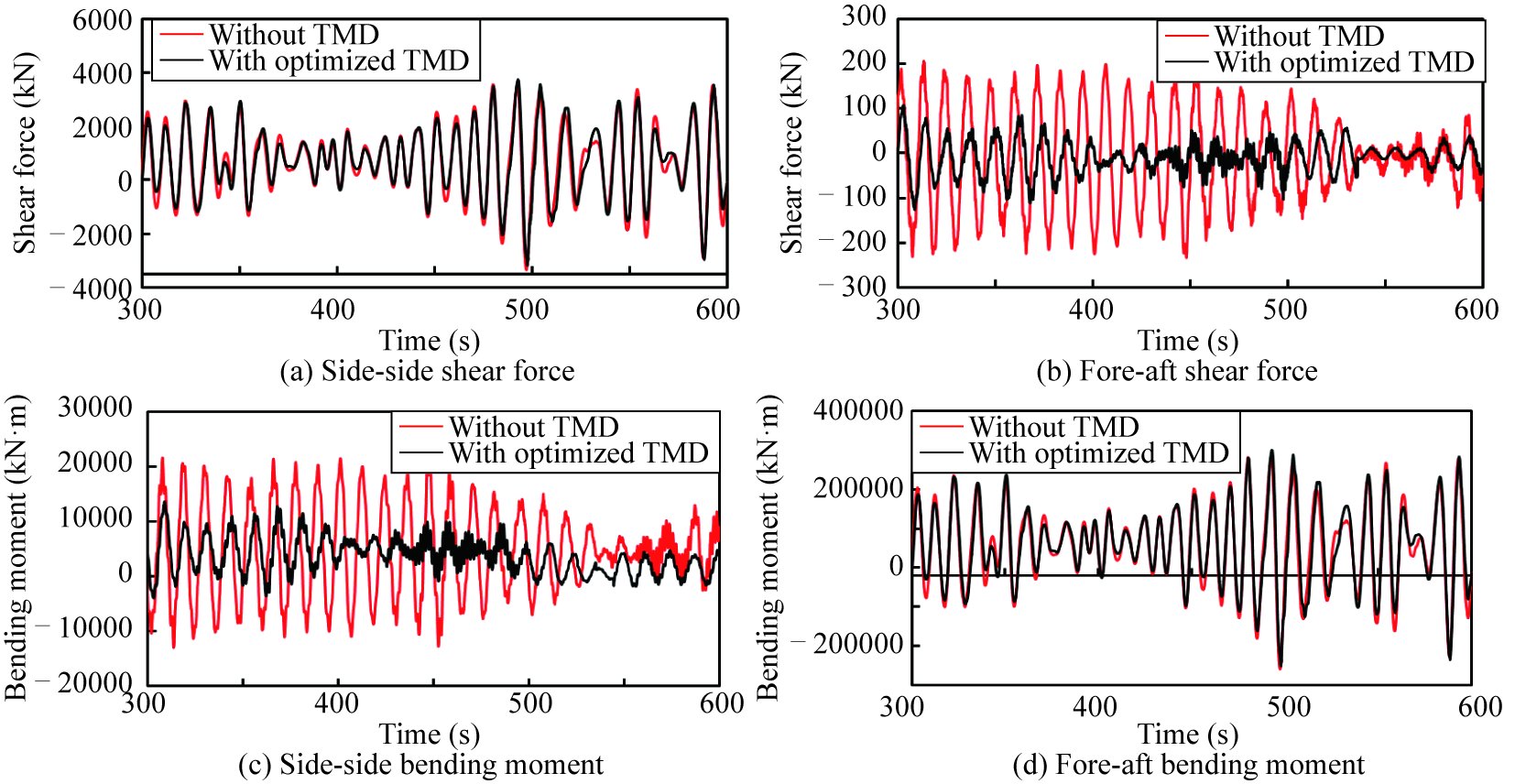
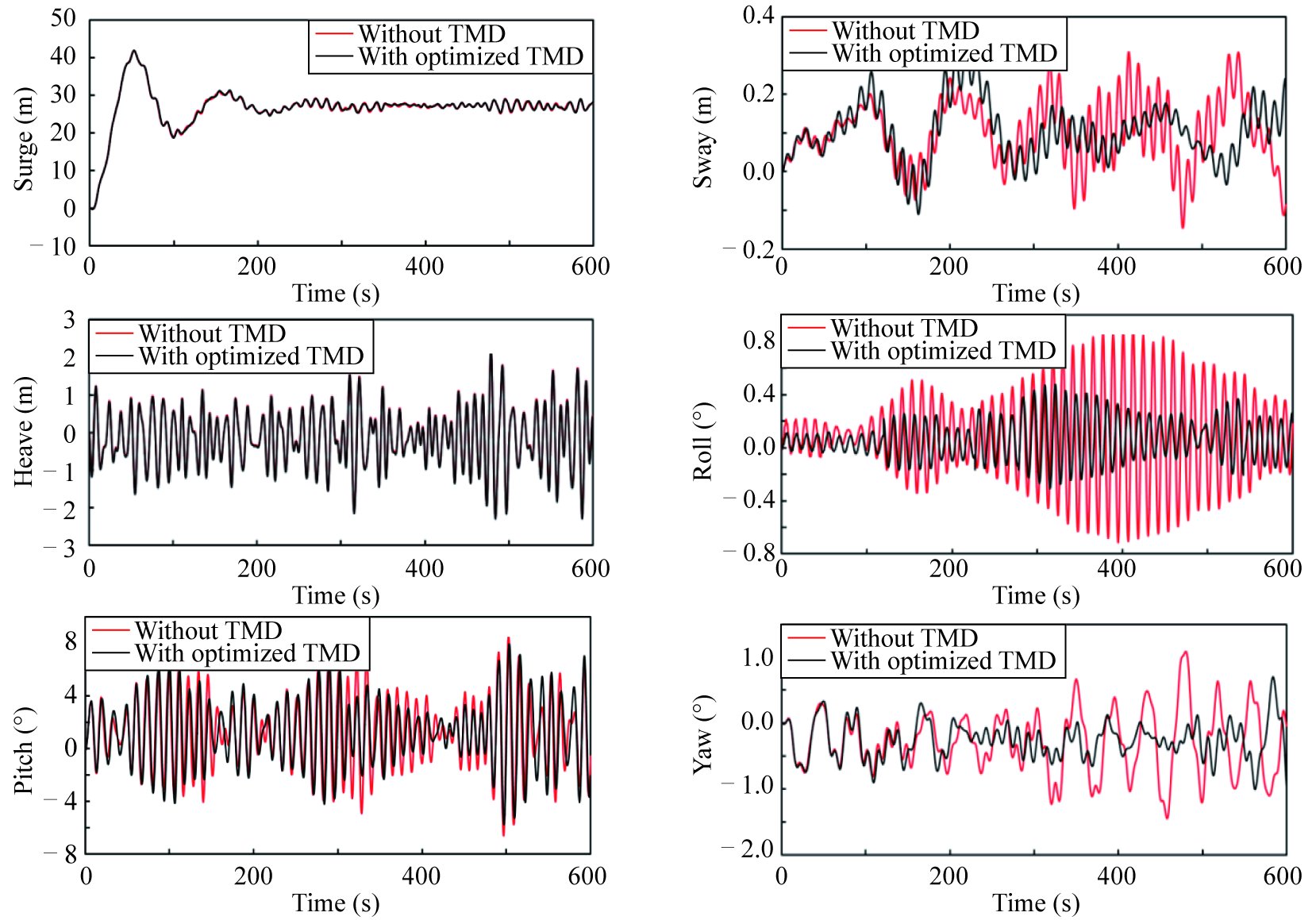
A floating offshore wind turbine (FOWT) has a great potential in producing renewable energy as offshore wind resource is rich in deep sea area (water deeper than 60 m) where fixed foundations are cost-effective or deployable. However, compared with a fixed-bottom installation, FOWT has to suffer more extreme loads due to its extra degrees of freedom. Therefore, the stability of an FOWT is a key challenge in exploiting offshore deep-water wind. Focusing on the stability of barge-type FOWT, this paper is to investigate the effect of passive structural control by equipping a tuned mass damper (TMD) on the nacelle. The turbulent wind with sharp fluctuations is established both in velocity and inflow direction based on standard Kaimal turbulence spectrum as suggested in the standard IEC61400-2. The irregular wave is generated according to the Pierson-Moskowitz spectrum. The dynamic structural characteristics of FOWT are calculated based on the fully coupled aero-hydro-servo-elastic solver FAST. Evidence has shown that the proposed method of the nacelle-based TMD is effective in controlling stability of an FOWT, as the sway and roll motions of barge and the side-side displacement of tower top decreased significantly. With the increase of mass, the side-side displacement of tower-top and the amplitude of roll motion of barge reveal a trend of increasing first and then decreasing. The stiffness and damping have little effect. Furthermore, the multi-island genetic optimization algorithm (MIGA) is employed to find globally optimum structural parameters (mass, stiffness and damping) of the TMD. The optimum structure parameters of TMD are achieved when the mass is 21393 kg, damping is 13635 N/(m/s) and stiffness is 6828 N/m. By adopting the optimized TMD, stability of roll motion of barge and side-side displacement of tower-top increase up to 53% and 50% respectively when compared with the normal TMD. The simulation results verify the validity and reliability of the proposed TMD control and the optimization methods.
A floating offshore wind turbine (FOWT) has a great potential in producing renewable energy as offshore wind resource is rich in deep sea area (water deeper than 60 m) where fixed foundations are cost-effective or deployable. However, compared with a fixed-bottom installation, FOWT has to suffer more extreme loads due to its extra degrees of freedom. Therefore, the stability of an FOWT is a key challenge in exploiting offshore deep-water wind. Focusing on the stability of barge-type FOWT, this paper is to investigate the effect of passive structural control by equipping a tuned mass damper (TMD) on the nacelle. The turbulent wind with sharp fluctuations is established both in velocity and inflow direction based on standard Kaimal turbulence spectrum as suggested in the standard IEC61400-2. The irregular wave is generated according to the Pierson-Moskowitz spectrum. The dynamic structural characteristics of FOWT are calculated based on the fully coupled aero-hydro-servo-elastic solver FAST. Evidence has shown that the proposed method of the nacelle-based TMD is effective in controlling stability of an FOWT, as the sway and roll motions of barge and the side-side displacement of tower top decreased significantly. With the increase of mass, the side-side displacement of tower-top and the amplitude of roll motion of barge reveal a trend of increasing first and then decreasing. The stiffness and damping have little effect. Furthermore, the multi-island genetic optimization algorithm (MIGA) is employed to find globally optimum structural parameters (mass, stiffness and damping) of the TMD. The optimum structure parameters of TMD are achieved when the mass is 21393 kg, damping is 13635 N/(m/s) and stiffness is 6828 N/m. By adopting the optimized TMD, stability of roll motion of barge and side-side displacement of tower-top increase up to 53% and 50% respectively when compared with the normal TMD. The simulation results verify the validity and reliability of the proposed TMD control and the optimization methods.
2019, 33(3): 322-332.
doi: 10.1007/s13344-019-0031-7
Abstract:
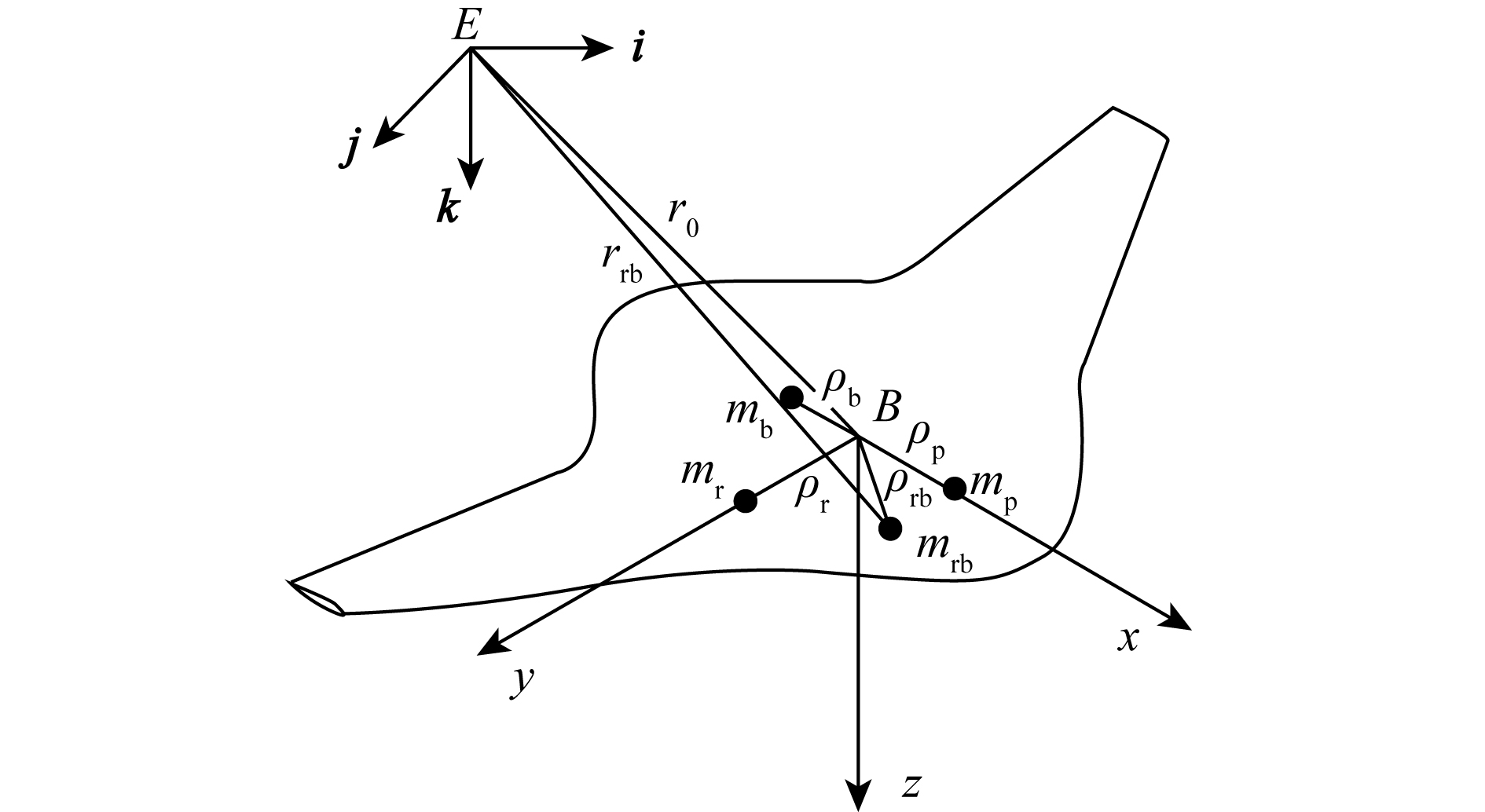
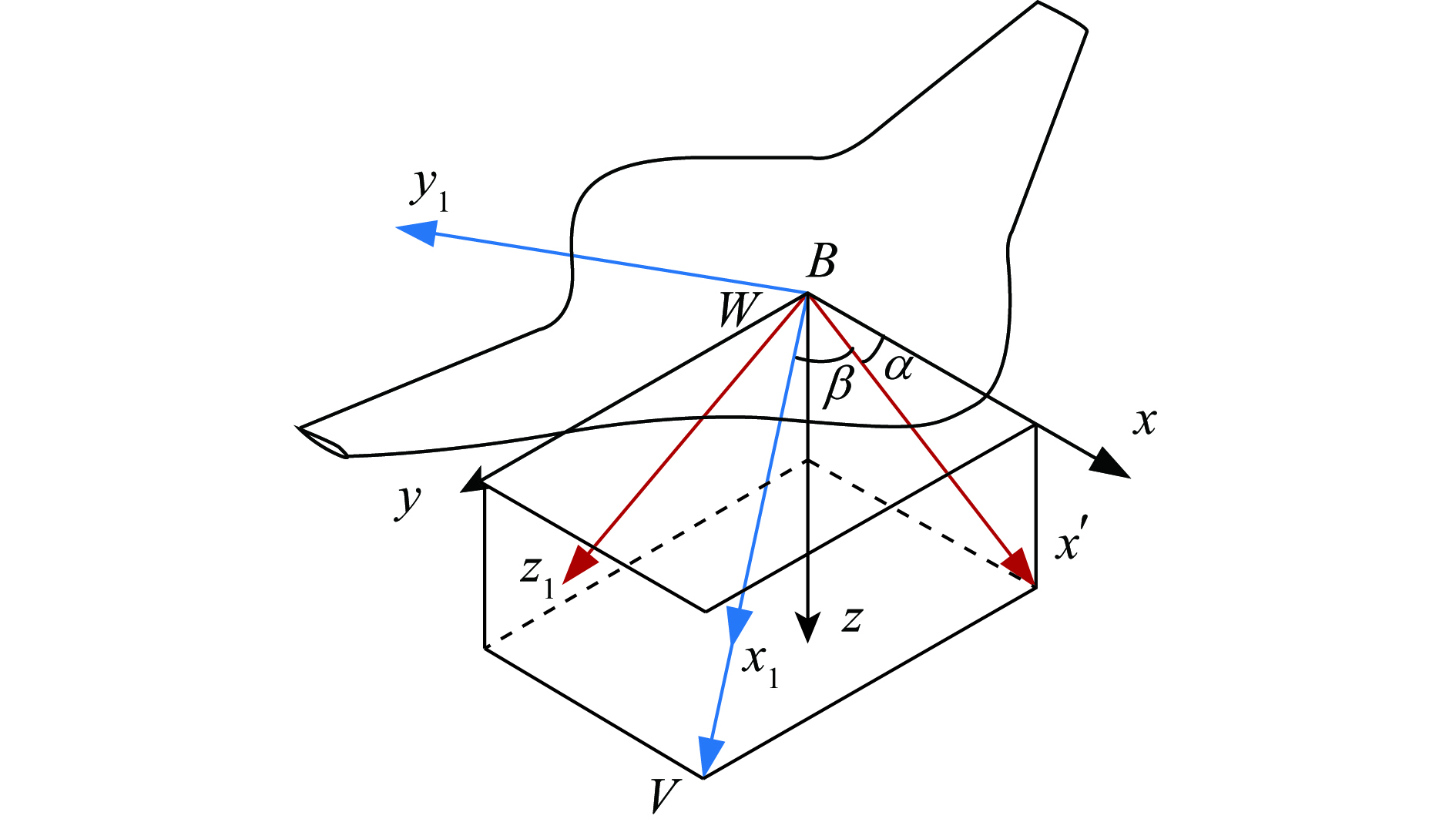
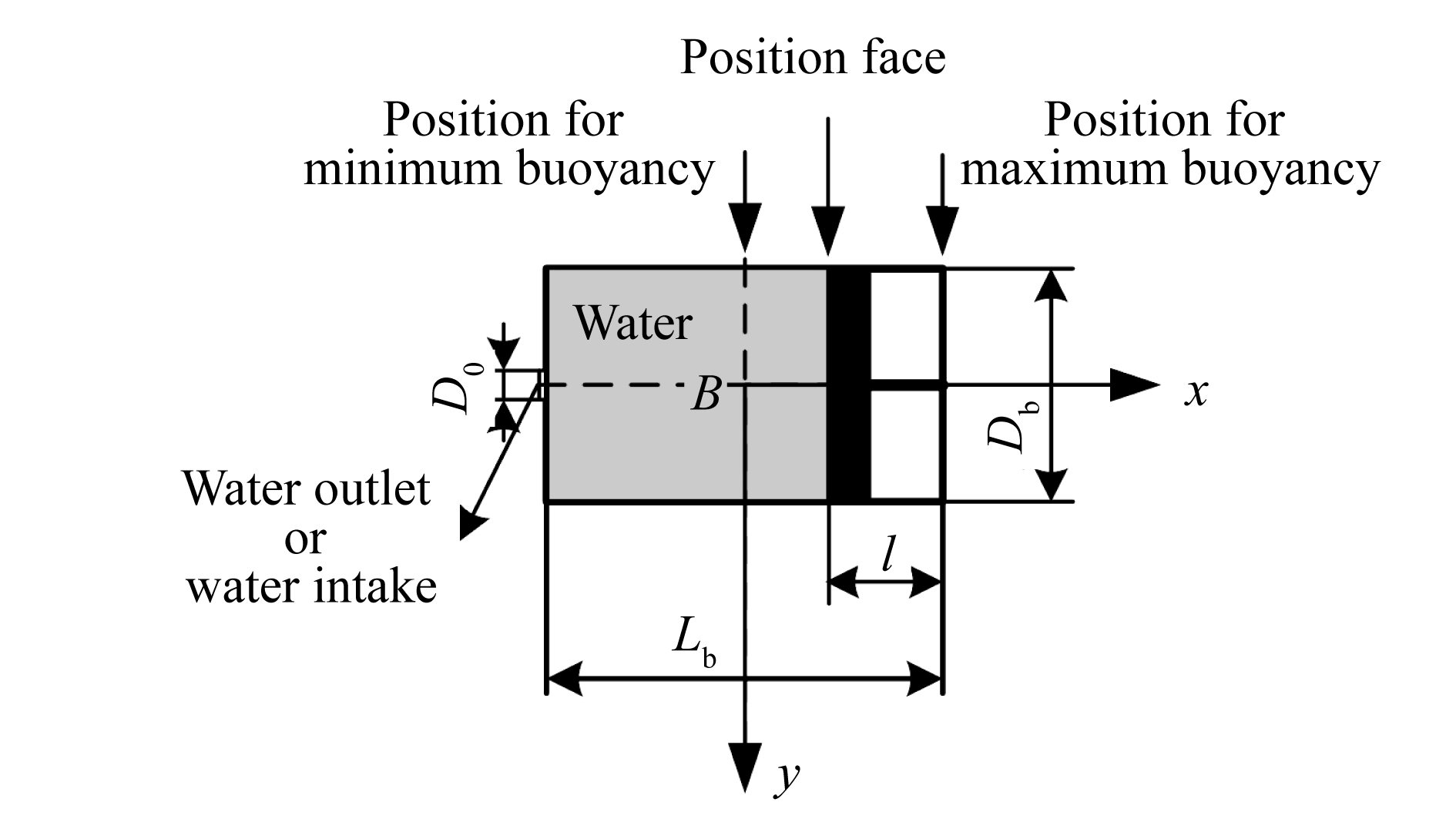
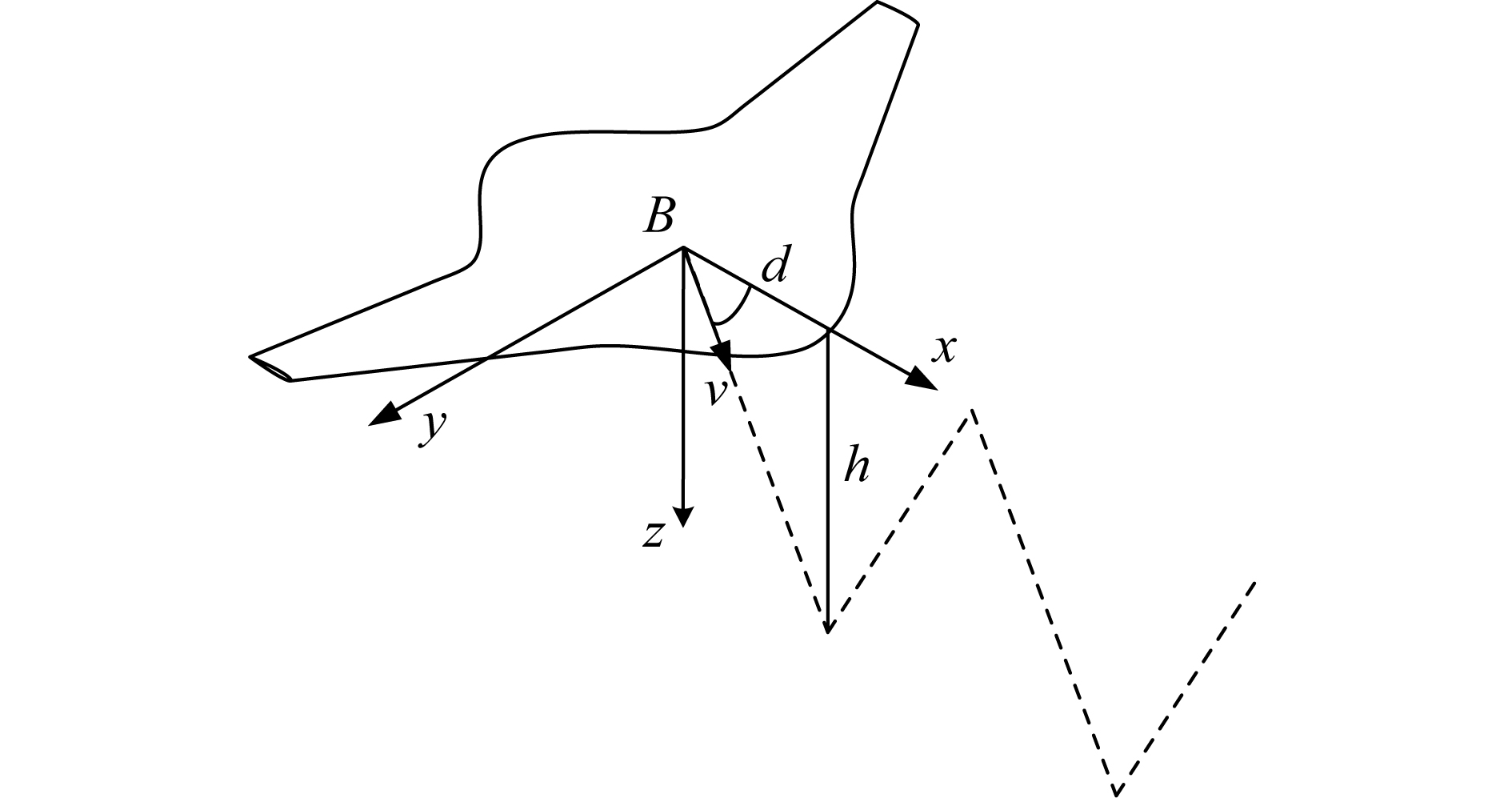
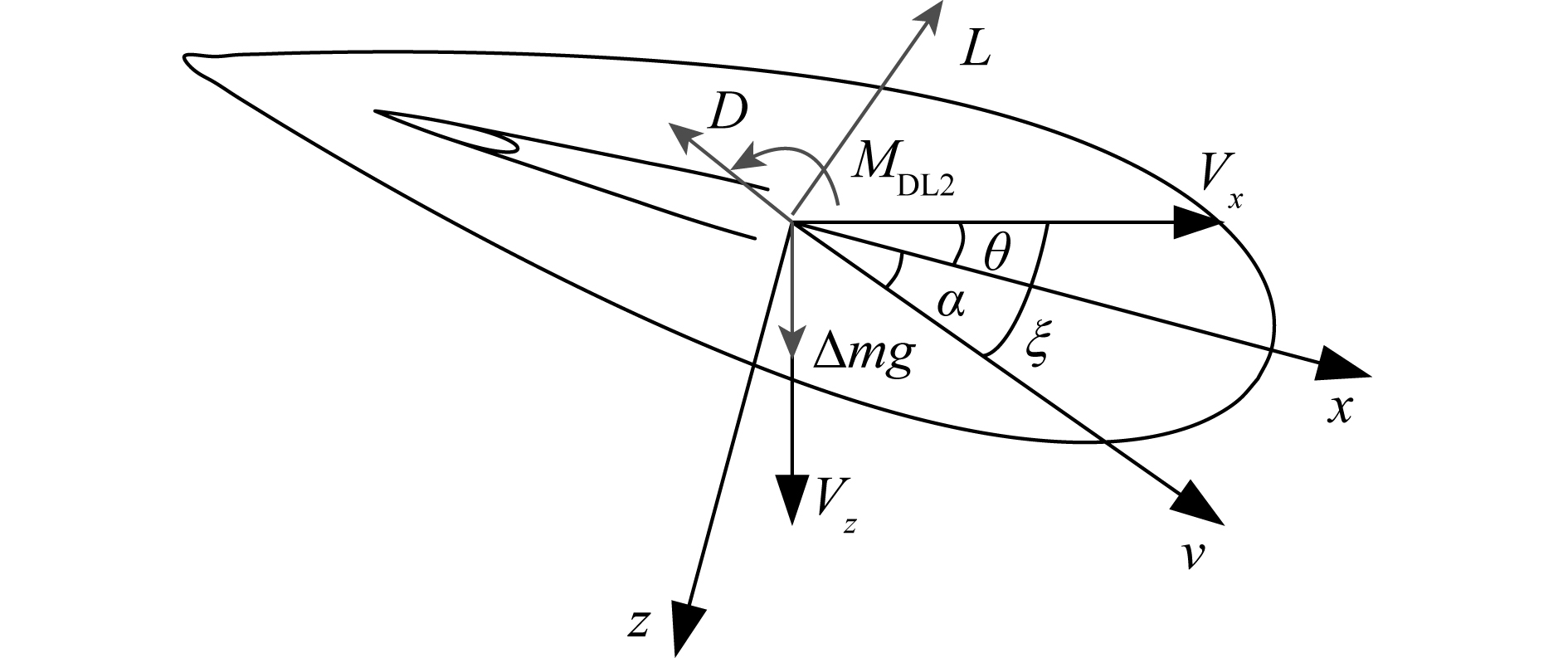
The flying-wing underwater glider (UG), shaped as a blended wing body, is a new type of underwater vehicle and still requires further research. The shape layout and the configuration of the internal actuators of the flying-wing UG are different from those of "legacy gliders" which have revolving bodies, and these two factors strongly affect the dynamic performance of the vehicle. Considering these differences, we propose a new configuration of the internal actuators for the flying-wing UG and treat the flying-wing UG as a multi-body system when establishing its dynamic model. In this paper, a detailed dynamic model is presented using the Newton-Euler method for the flying-wing UG. Based on the full dynamic model, the effect of the internal actuators on the steady gliding motion of vehicle is studied theoretically, and the relationship between the state parameters of the steady gliding motion and the controlled variables is obtained by solving a set of equilibrium equations. Finally, the behaviors of two classical motion modes of the glider are analyzed based on the simulation. The simulation results demonstrate that the motion performance of the proposed flying-wing UG is satisfactory.
The flying-wing underwater glider (UG), shaped as a blended wing body, is a new type of underwater vehicle and still requires further research. The shape layout and the configuration of the internal actuators of the flying-wing UG are different from those of "legacy gliders" which have revolving bodies, and these two factors strongly affect the dynamic performance of the vehicle. Considering these differences, we propose a new configuration of the internal actuators for the flying-wing UG and treat the flying-wing UG as a multi-body system when establishing its dynamic model. In this paper, a detailed dynamic model is presented using the Newton-Euler method for the flying-wing UG. Based on the full dynamic model, the effect of the internal actuators on the steady gliding motion of vehicle is studied theoretically, and the relationship between the state parameters of the steady gliding motion and the controlled variables is obtained by solving a set of equilibrium equations. Finally, the behaviors of two classical motion modes of the glider are analyzed based on the simulation. The simulation results demonstrate that the motion performance of the proposed flying-wing UG is satisfactory.

2019, 33(3): 333-343.
doi: 10.1007/s13344-019-0032-6
Abstract:
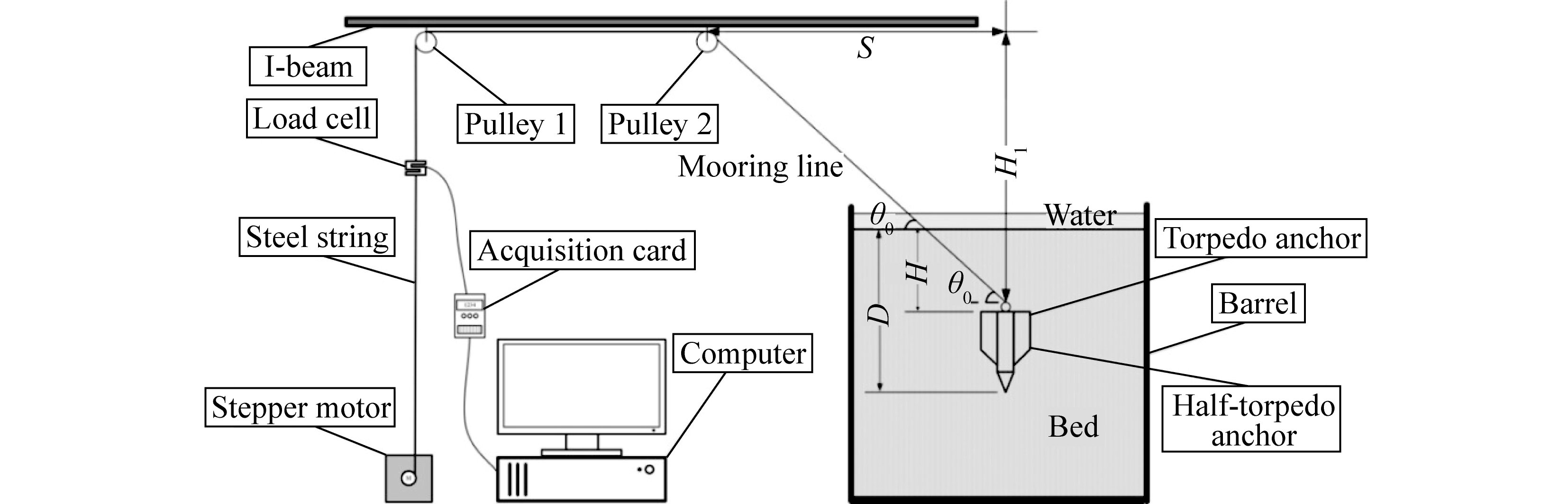
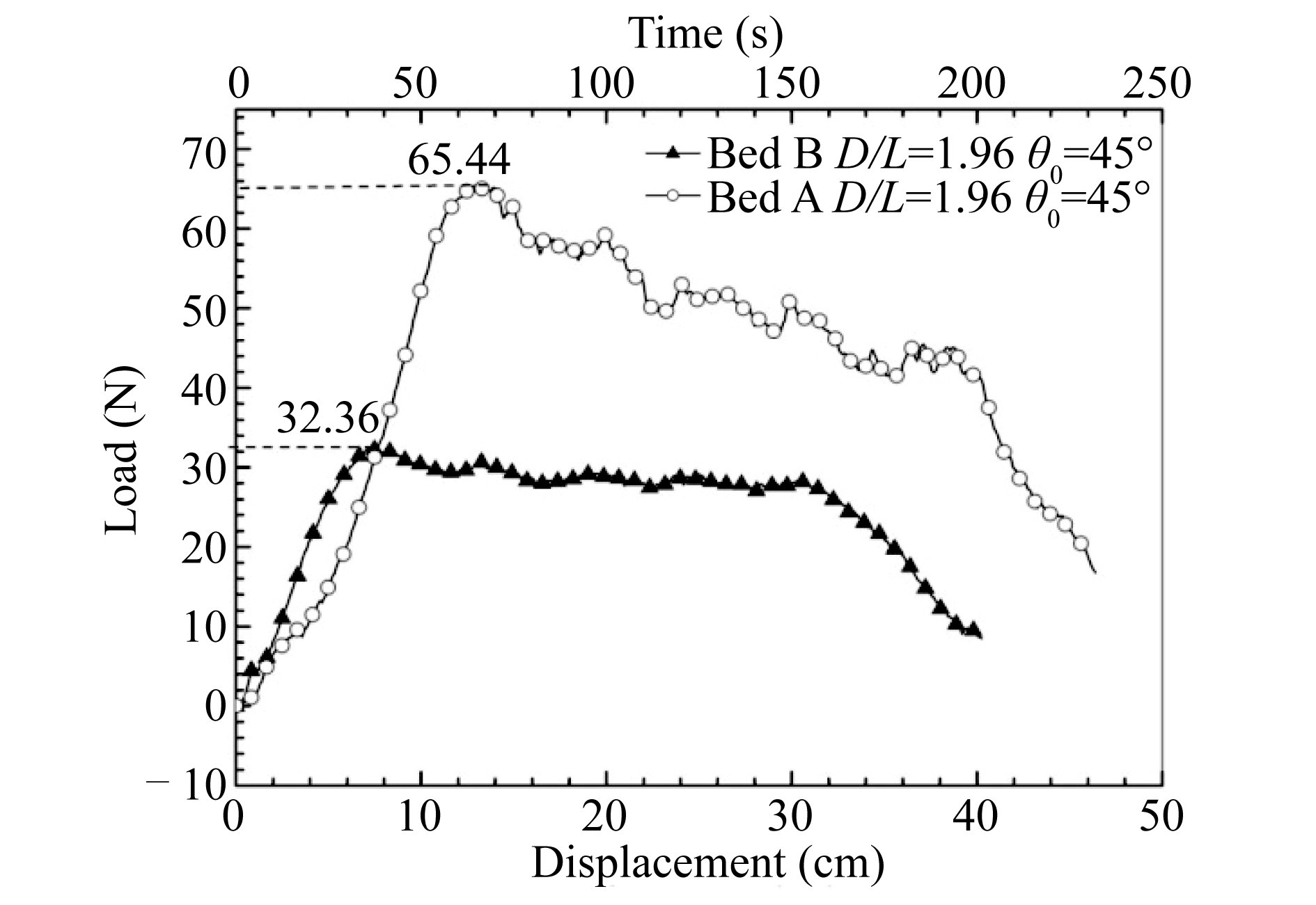
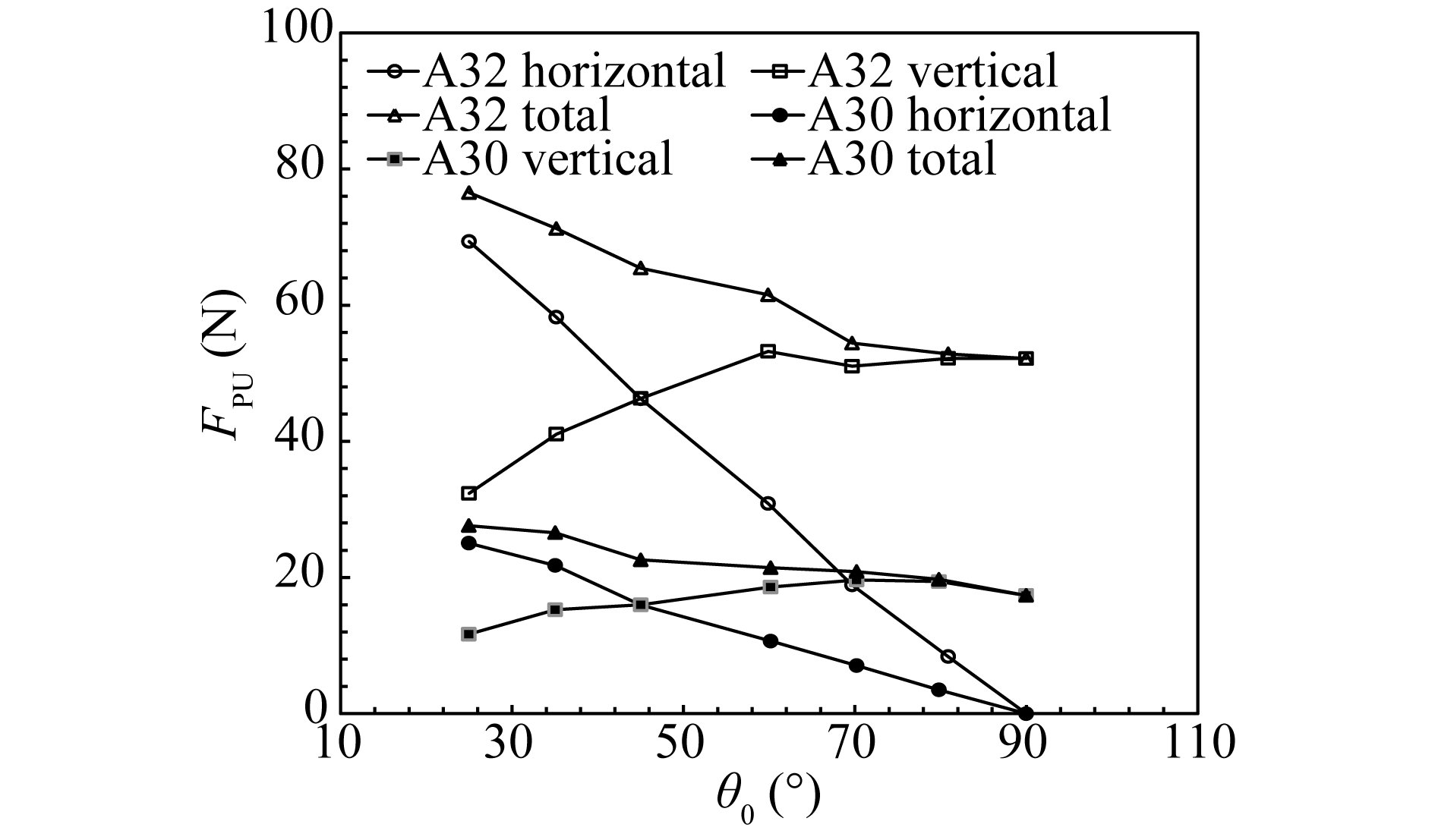
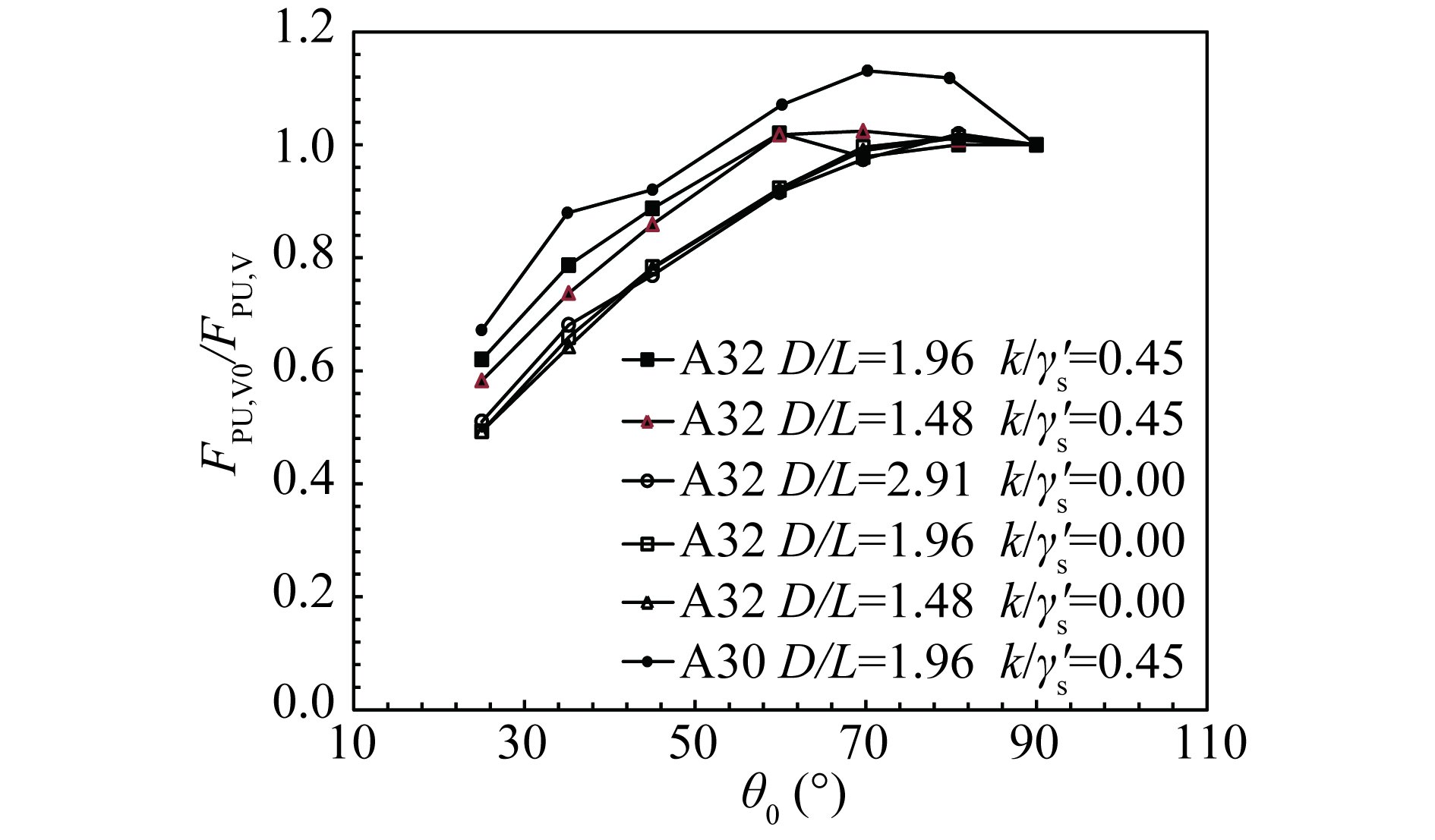
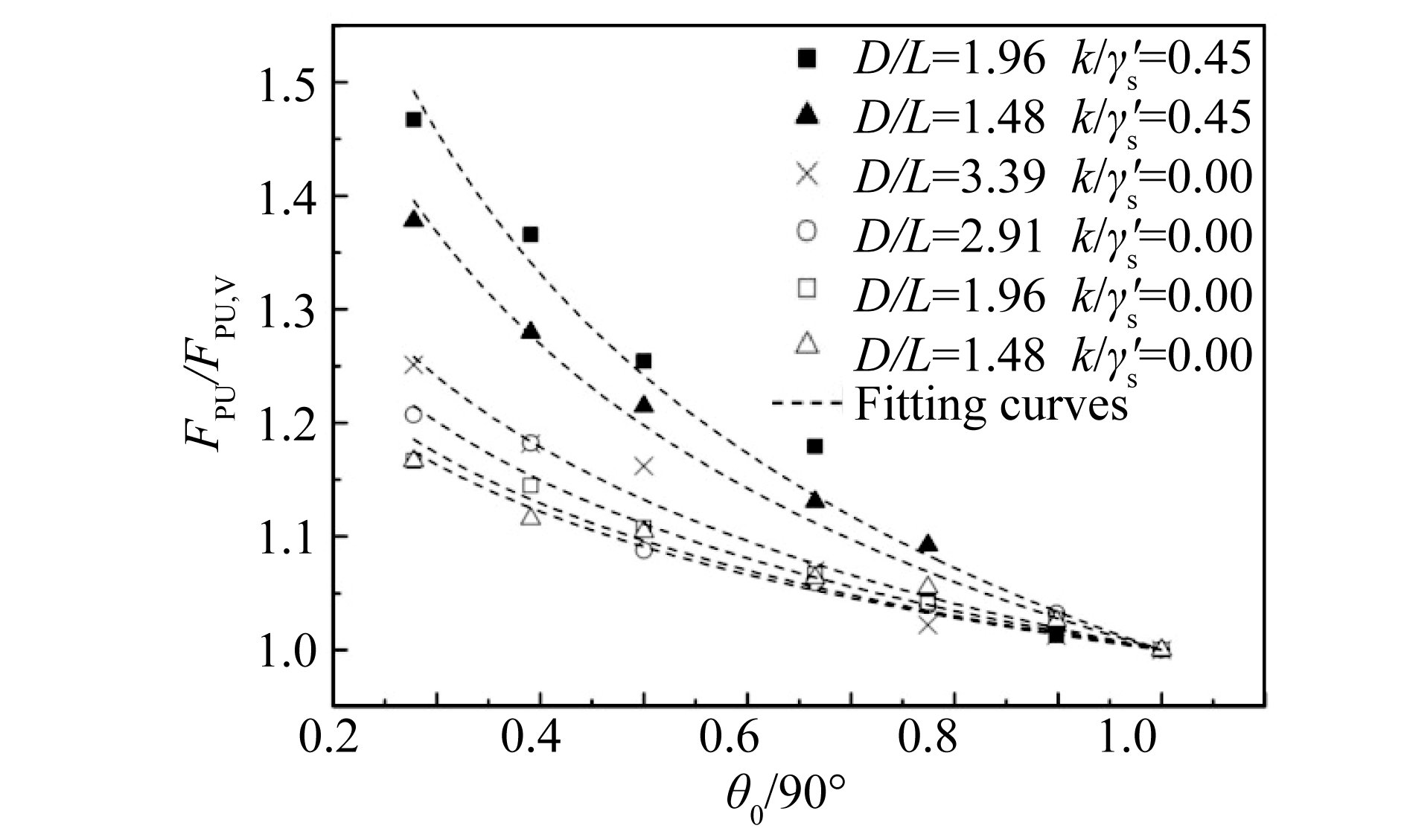
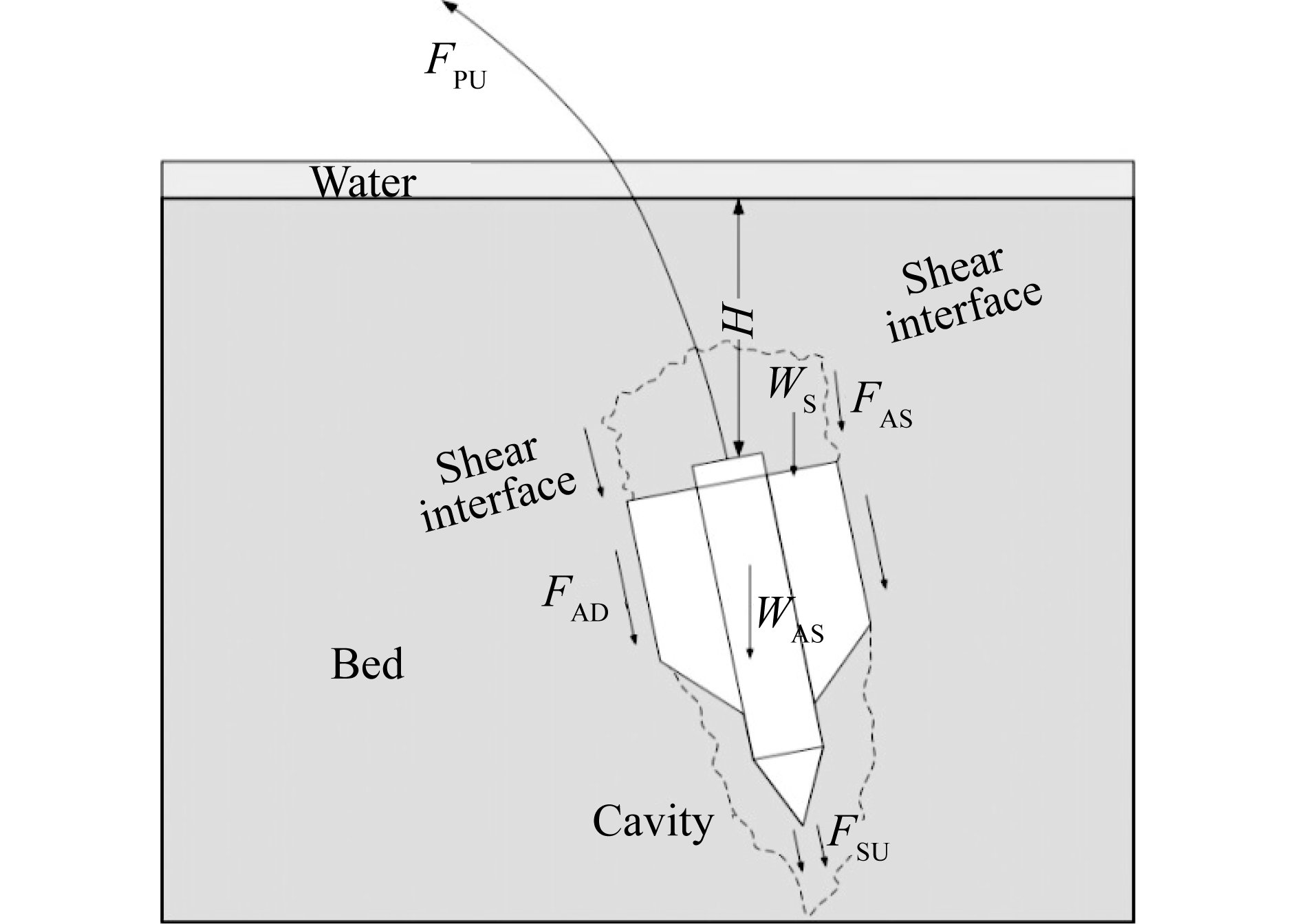
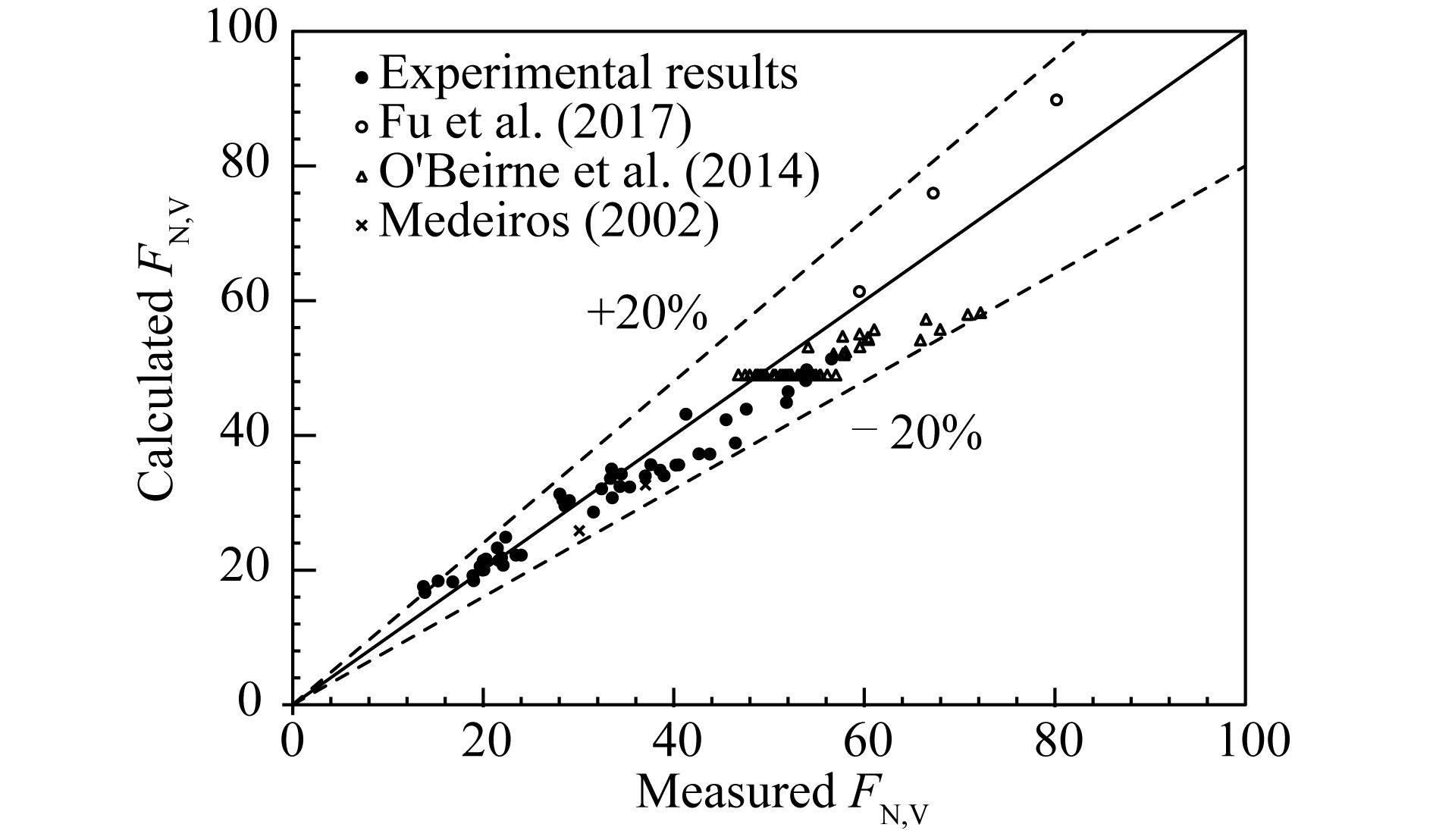
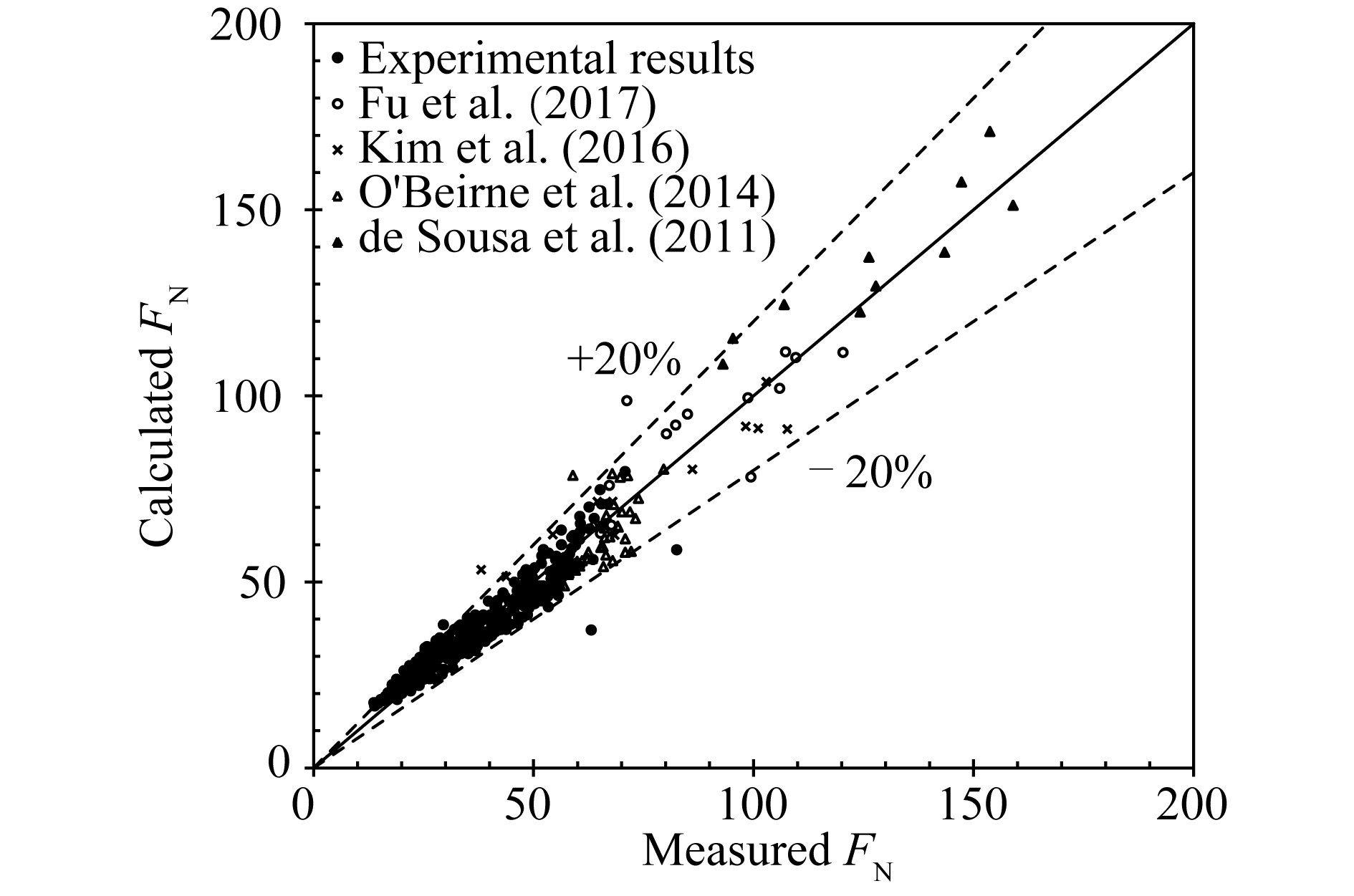
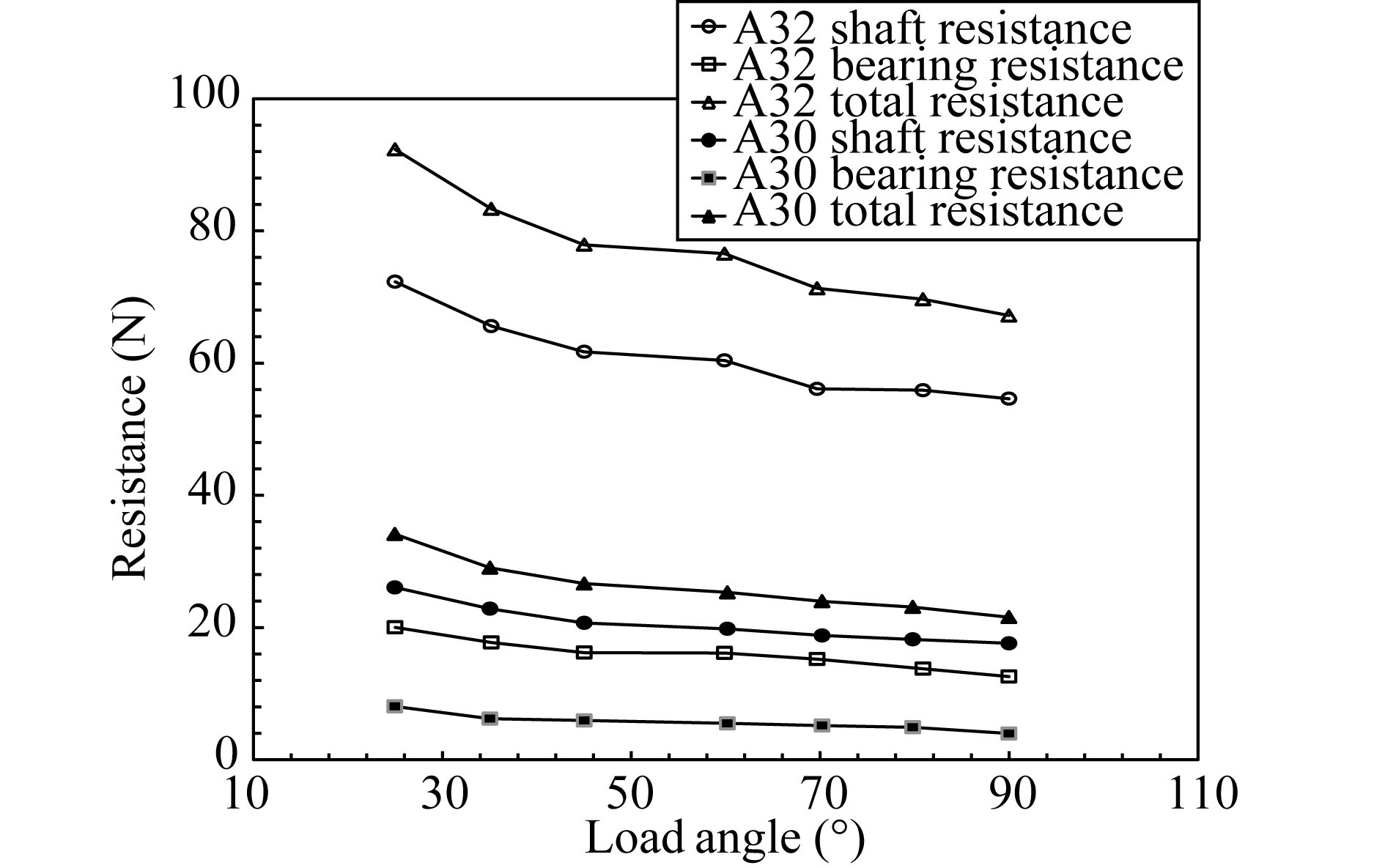
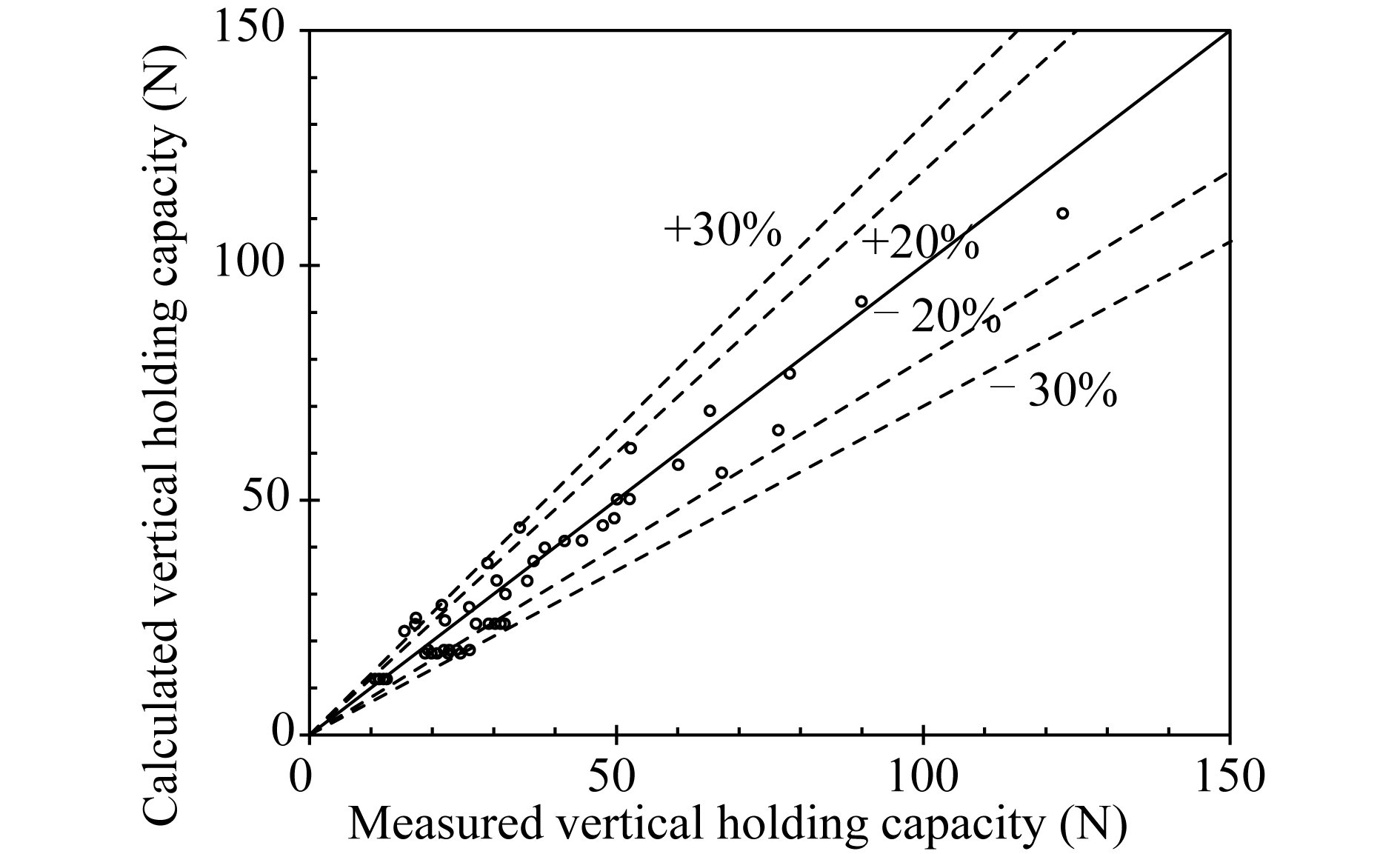
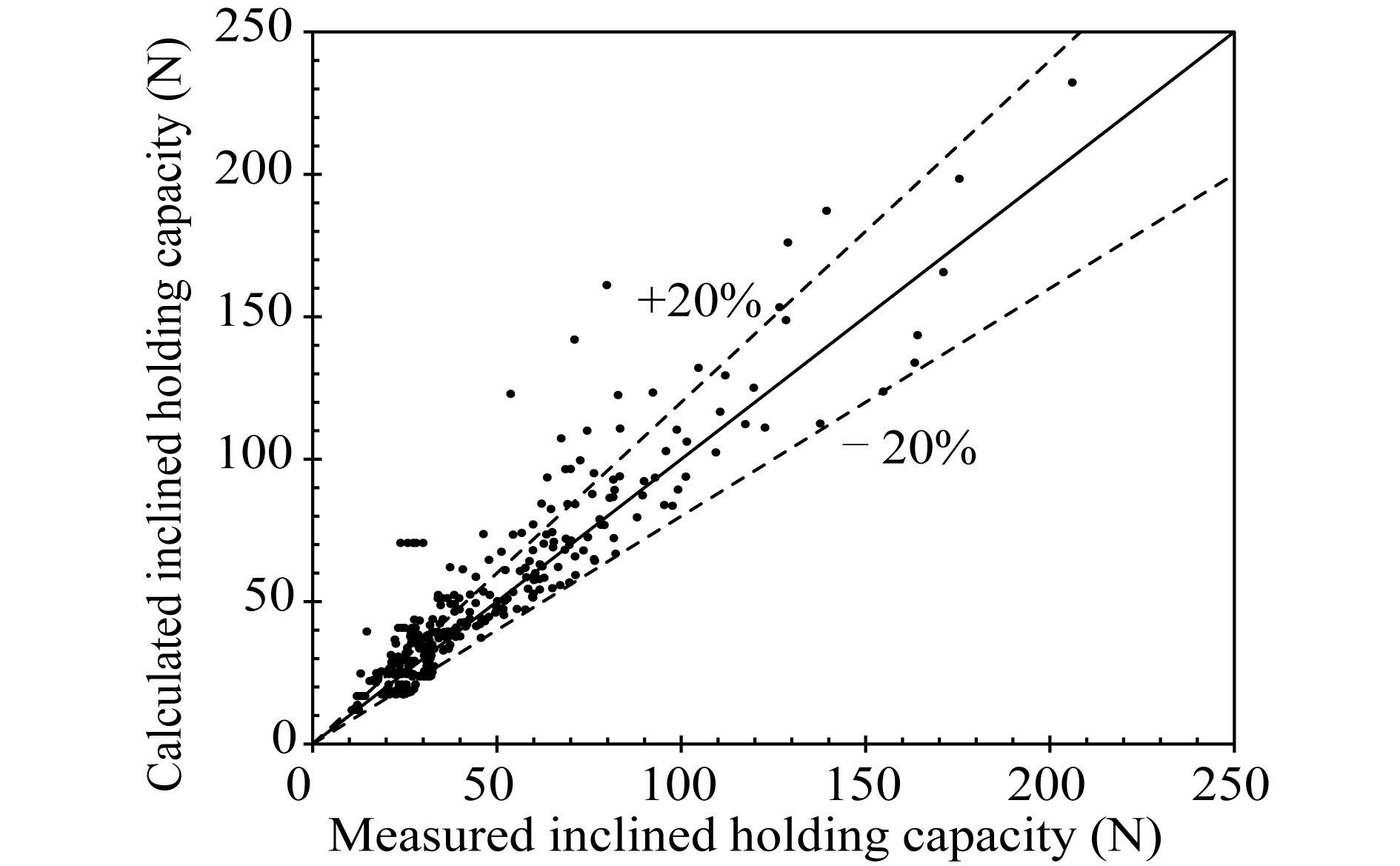
Torpedo anchors have been used in mooring systems for deep-water oil and gas projects owing to their prominent advantages, such as low cost and easy installation. The maximum force of torpedo anchors is crucial not only to the safety and stability of vessels and other marine facilities, but also for an economical design. It is necessary to develop reliable formula for fast predicting their maximum inclined force of a torpedo anchor in cohesive beds. In this study, the maximum inclined force of a torpedo anchor vertically embedded in cohesive beds was extensively investigated. 316 sets of inclined pullout laboratory tests were carried out for 9 differently shaped torpedo anchors which were vertically embedded in different cohesive beds. The loading curves were automatically acquisitioned and their characteristics were analyzed. The load angle relative to the horizontal varied from 20° to 90°. A new formula for fast calculating the maximum inclined force of the torpedo anchor vertically embedded in cohesive beds was obtained based on force analysis and a nonlinear regression on the data from the present and other studies. Effect aspects on the tests are discussed and further studies are highlighted.
Torpedo anchors have been used in mooring systems for deep-water oil and gas projects owing to their prominent advantages, such as low cost and easy installation. The maximum force of torpedo anchors is crucial not only to the safety and stability of vessels and other marine facilities, but also for an economical design. It is necessary to develop reliable formula for fast predicting their maximum inclined force of a torpedo anchor in cohesive beds. In this study, the maximum inclined force of a torpedo anchor vertically embedded in cohesive beds was extensively investigated. 316 sets of inclined pullout laboratory tests were carried out for 9 differently shaped torpedo anchors which were vertically embedded in different cohesive beds. The loading curves were automatically acquisitioned and their characteristics were analyzed. The load angle relative to the horizontal varied from 20° to 90°. A new formula for fast calculating the maximum inclined force of the torpedo anchor vertically embedded in cohesive beds was obtained based on force analysis and a nonlinear regression on the data from the present and other studies. Effect aspects on the tests are discussed and further studies are highlighted.
2019, 33(3): 344-355.
doi: 10.1007/s13344-019-0033-5
Abstract:
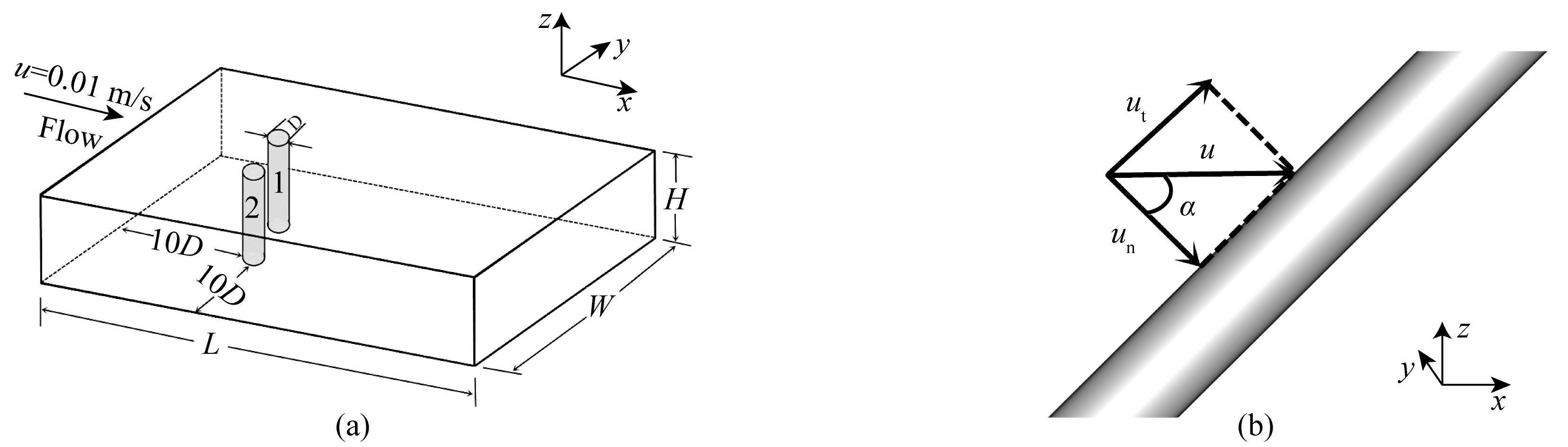
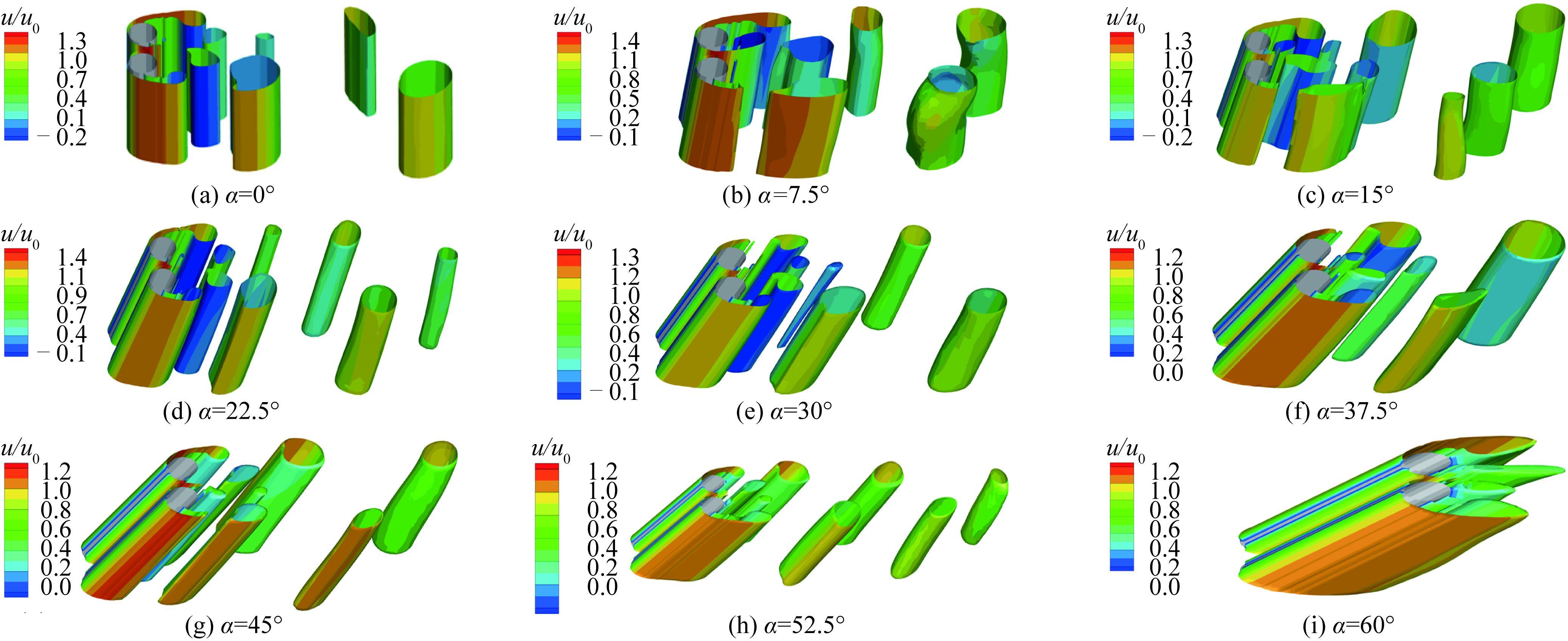
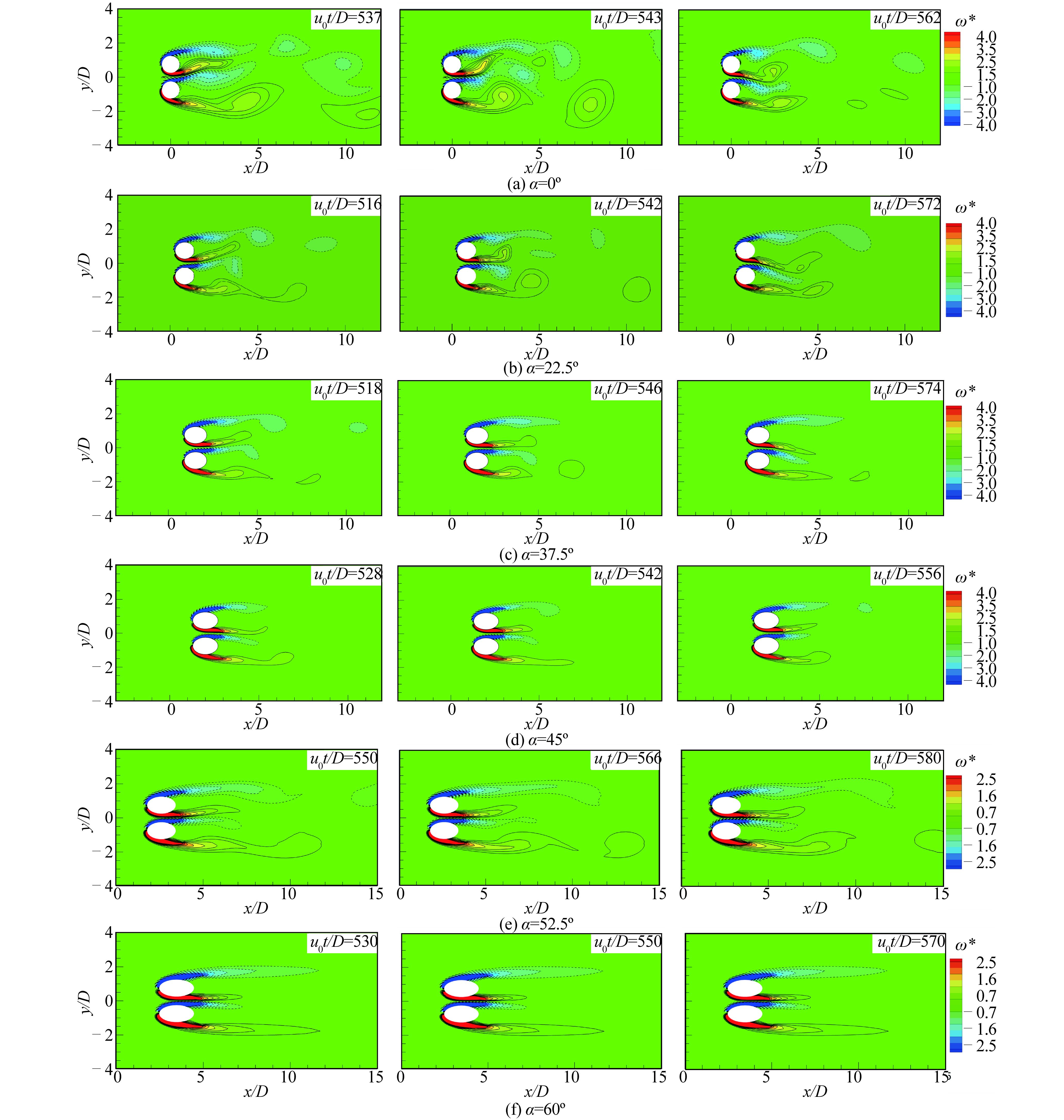
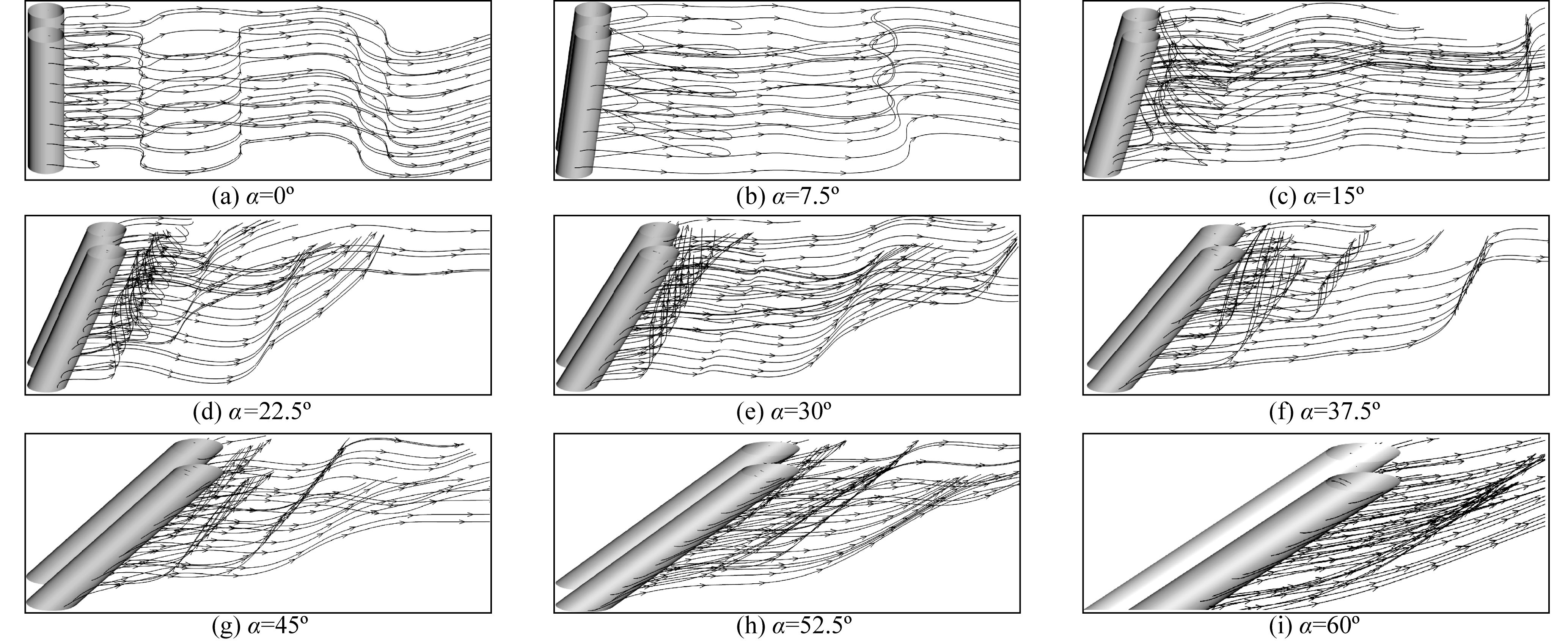
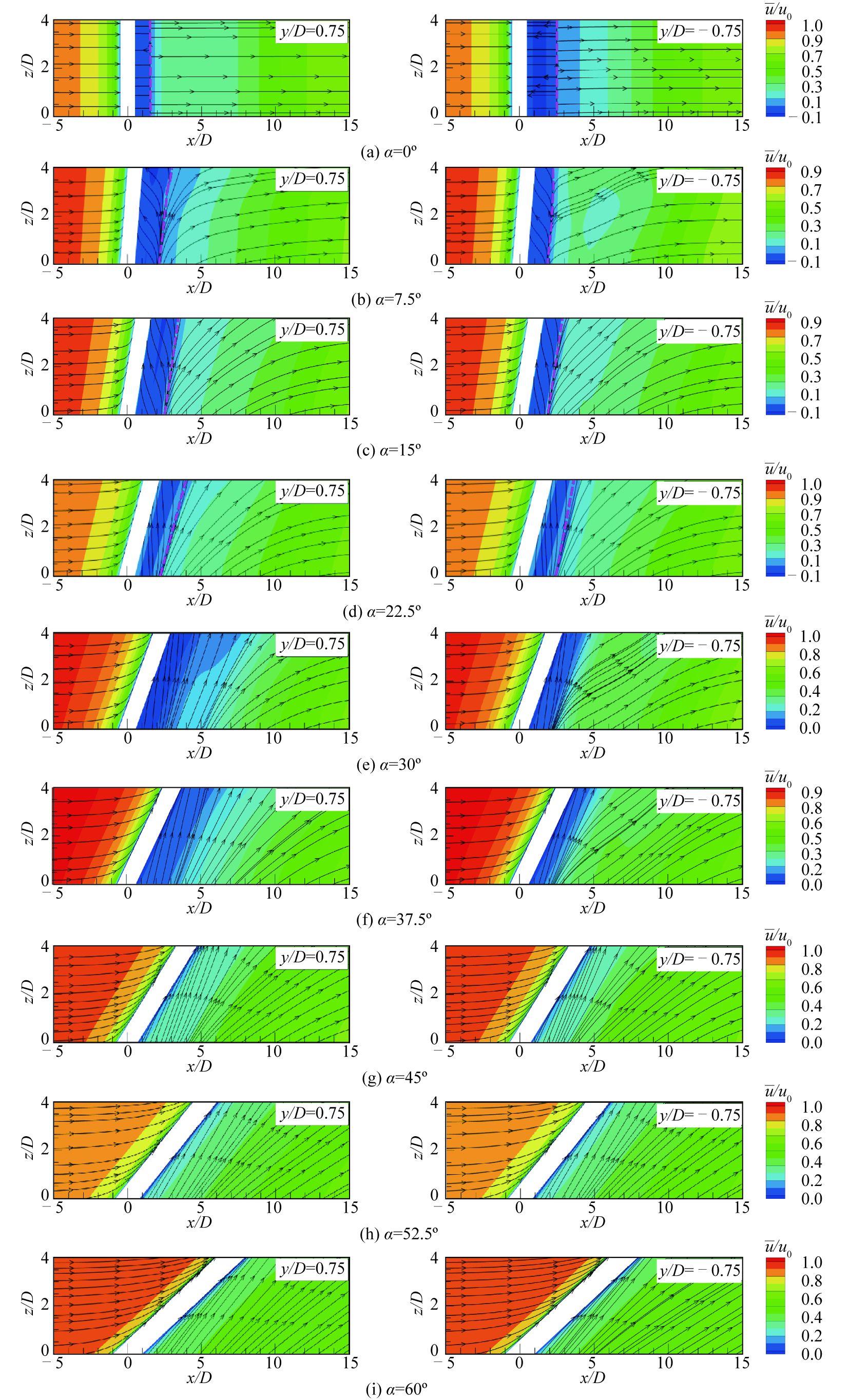
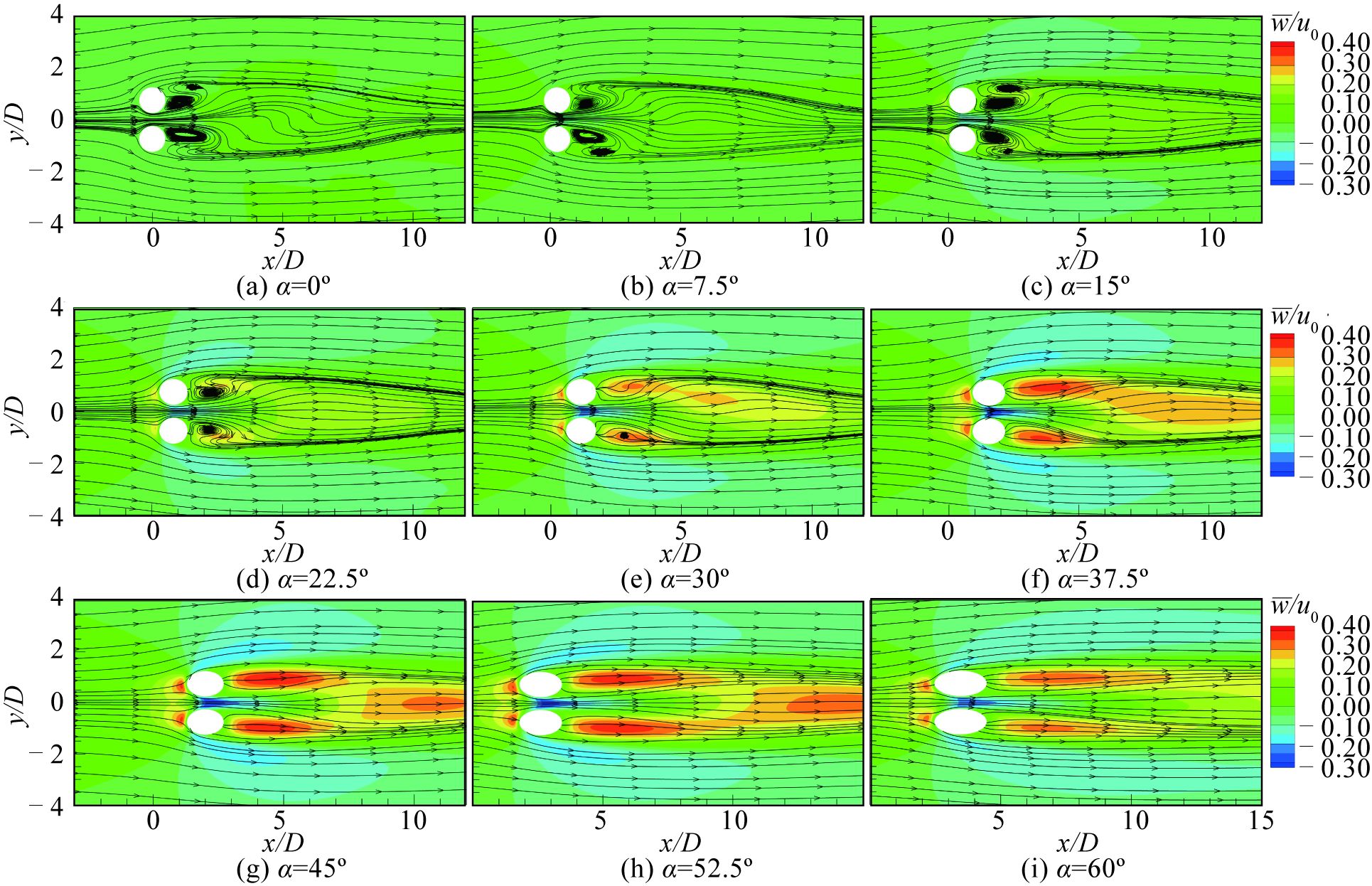
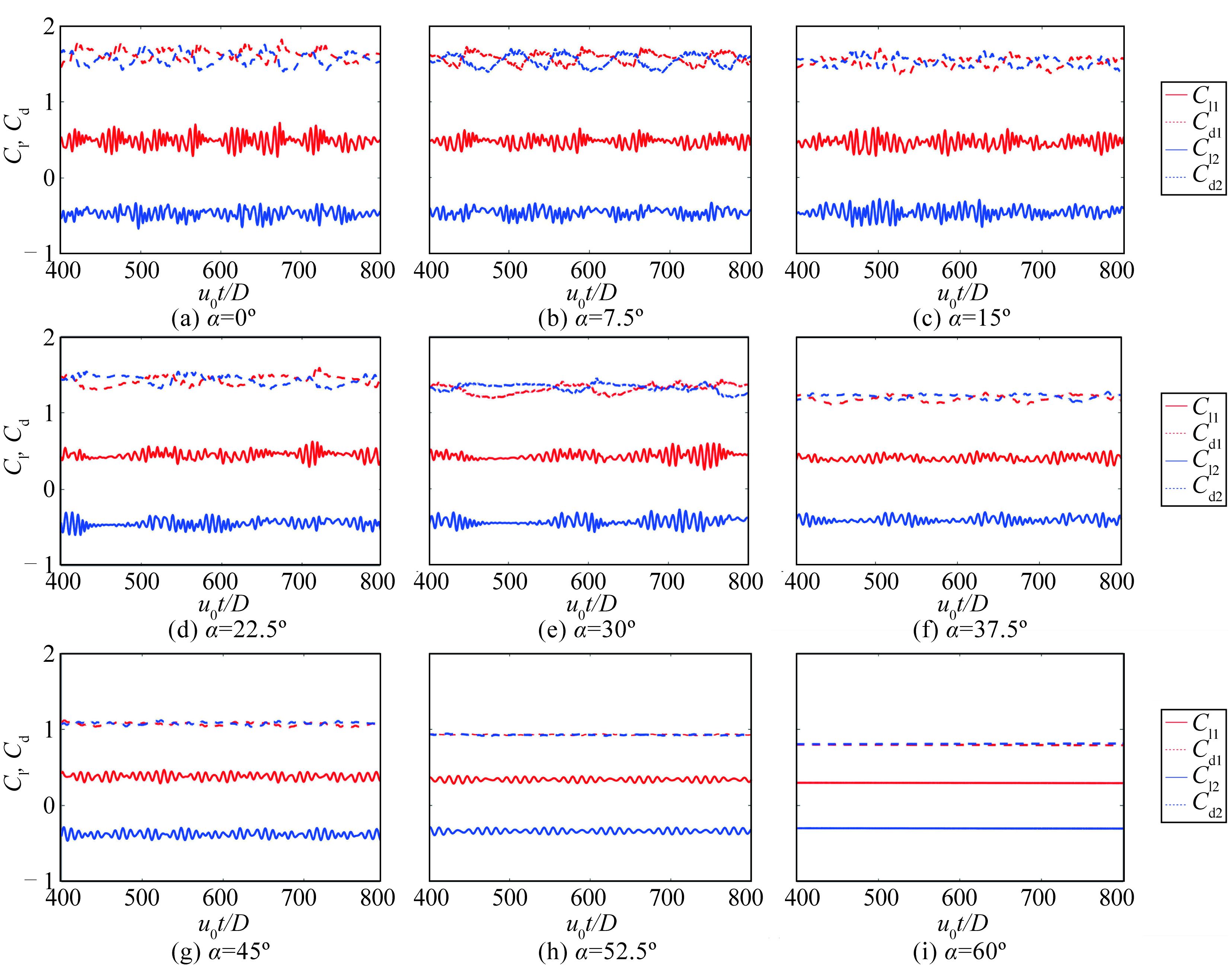
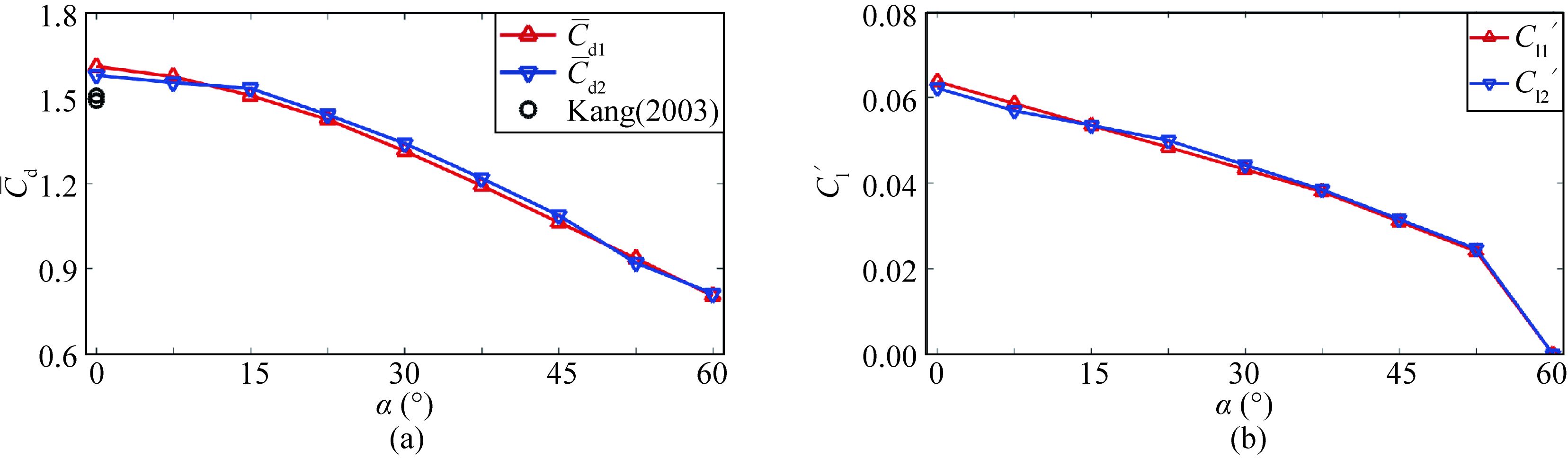
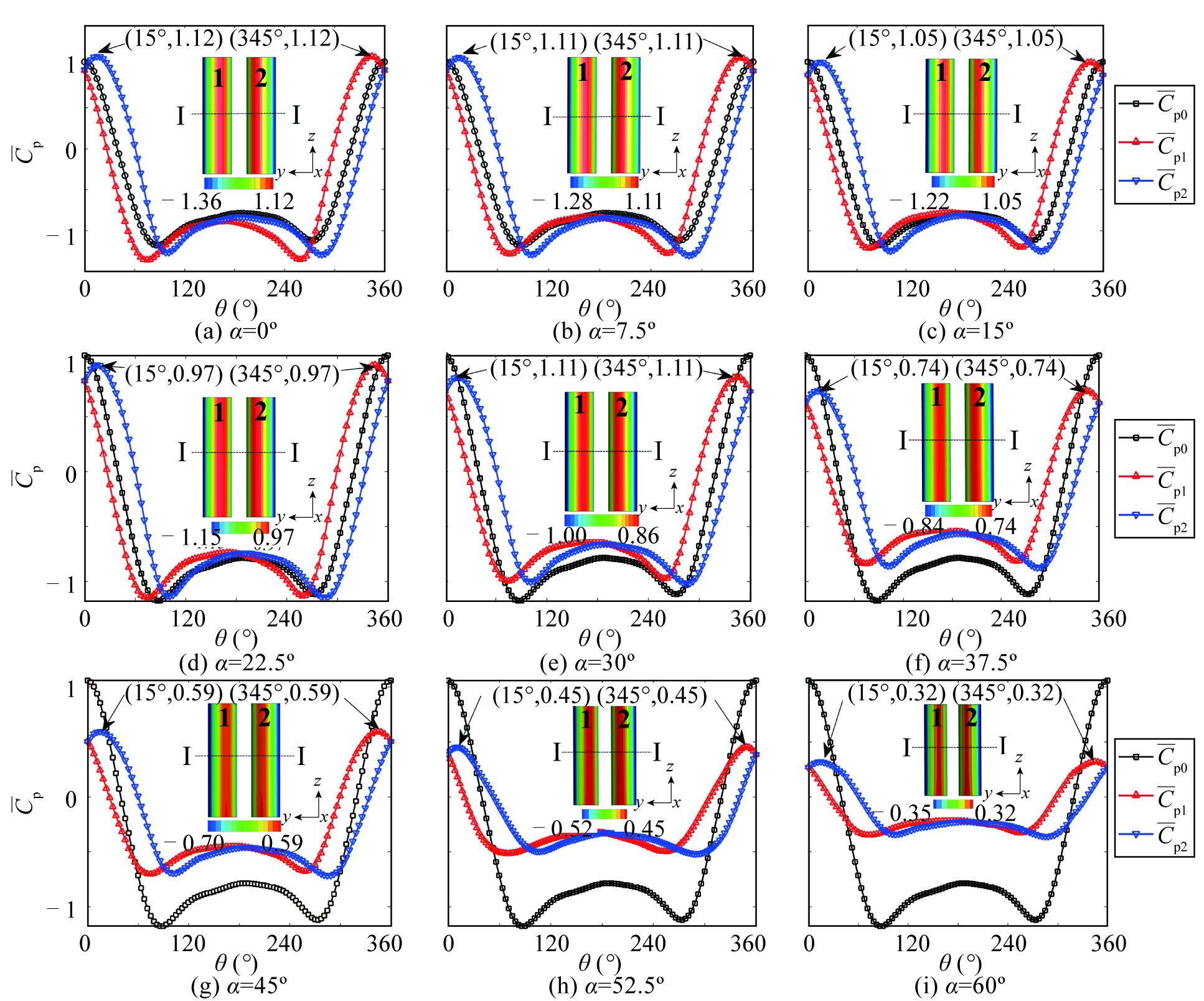
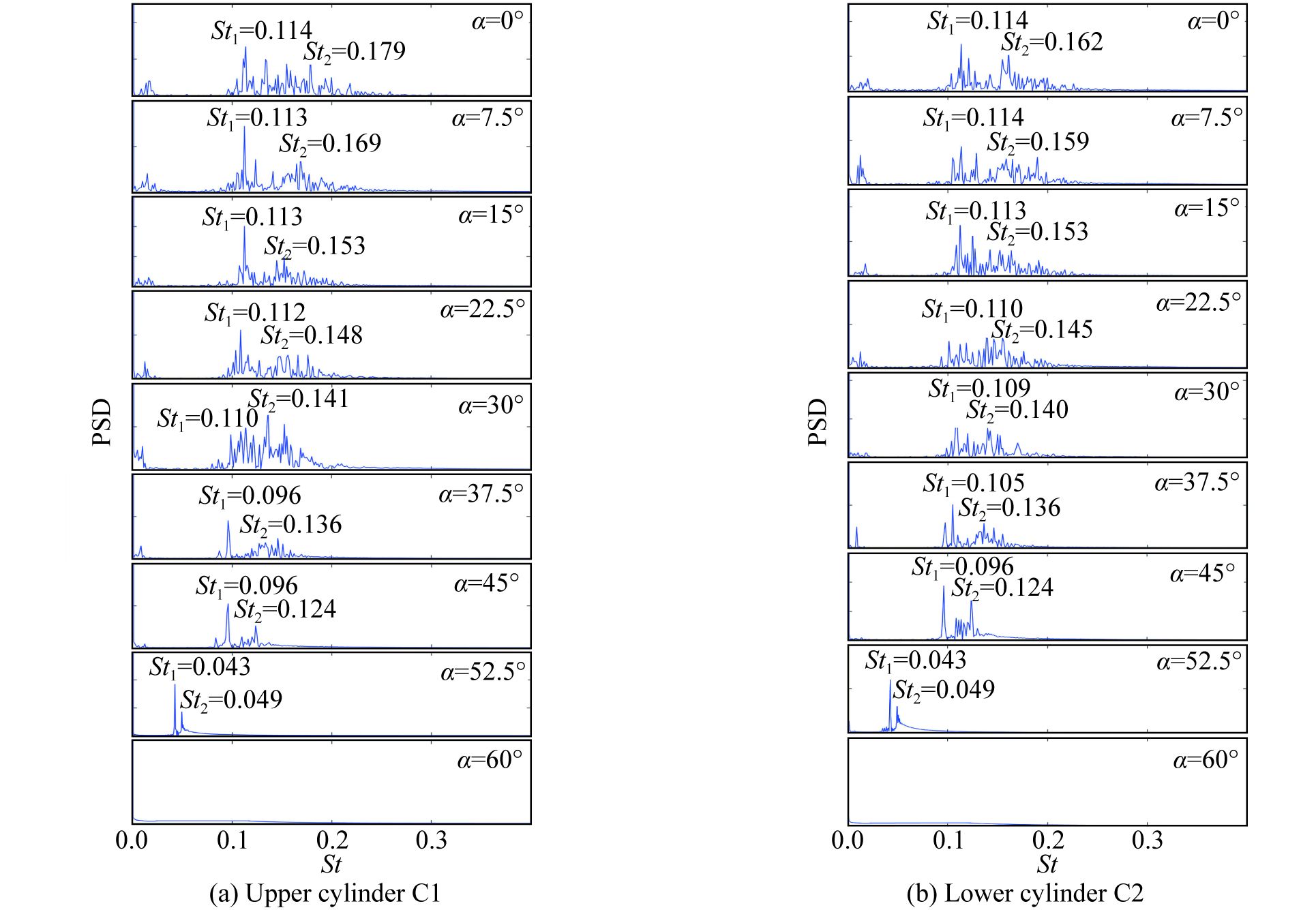
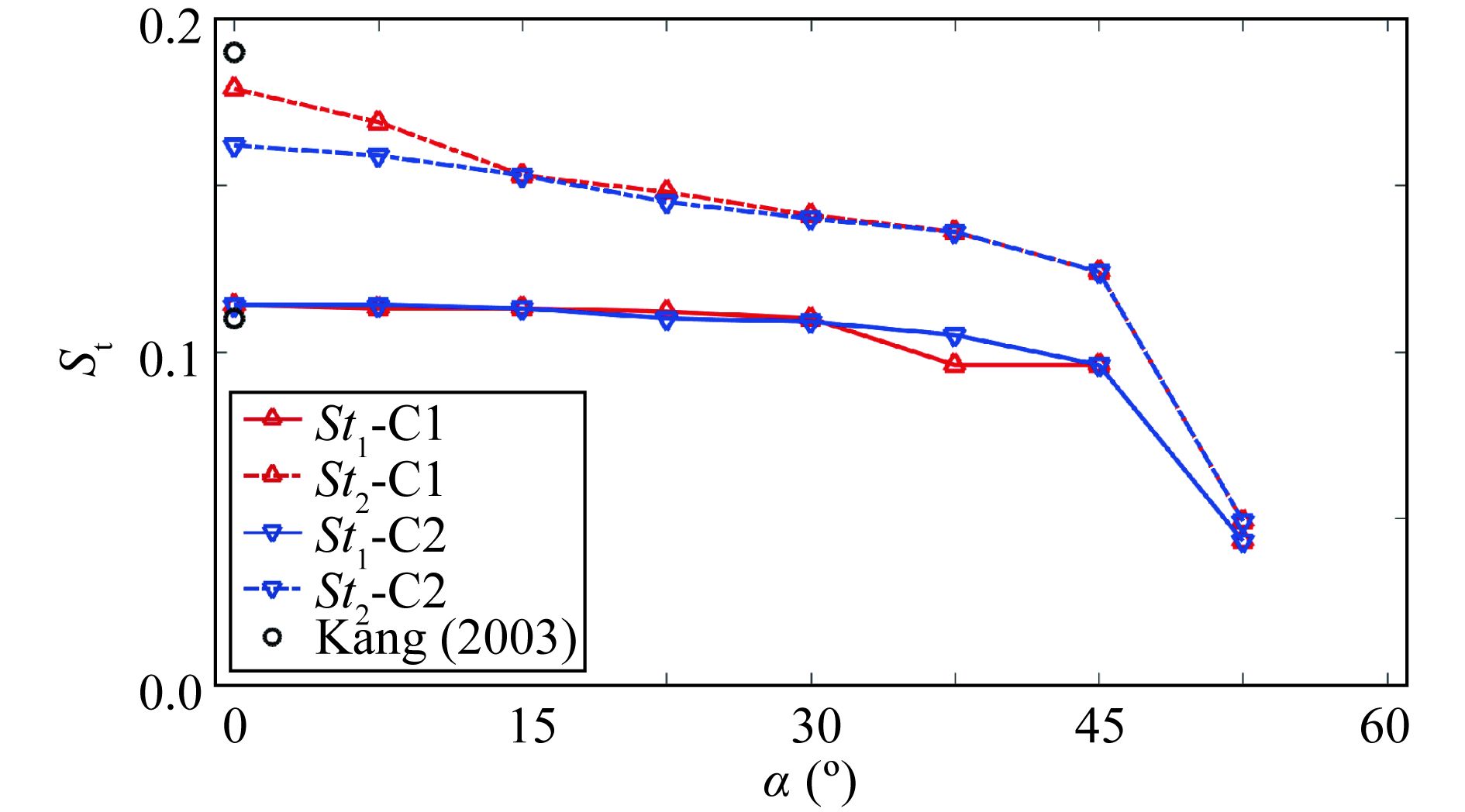
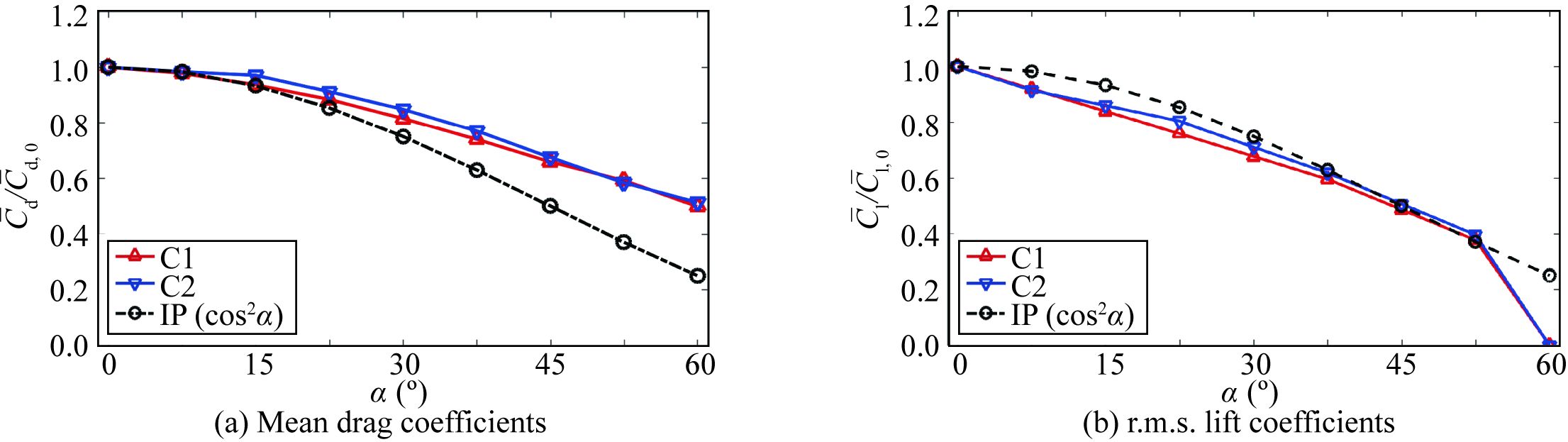
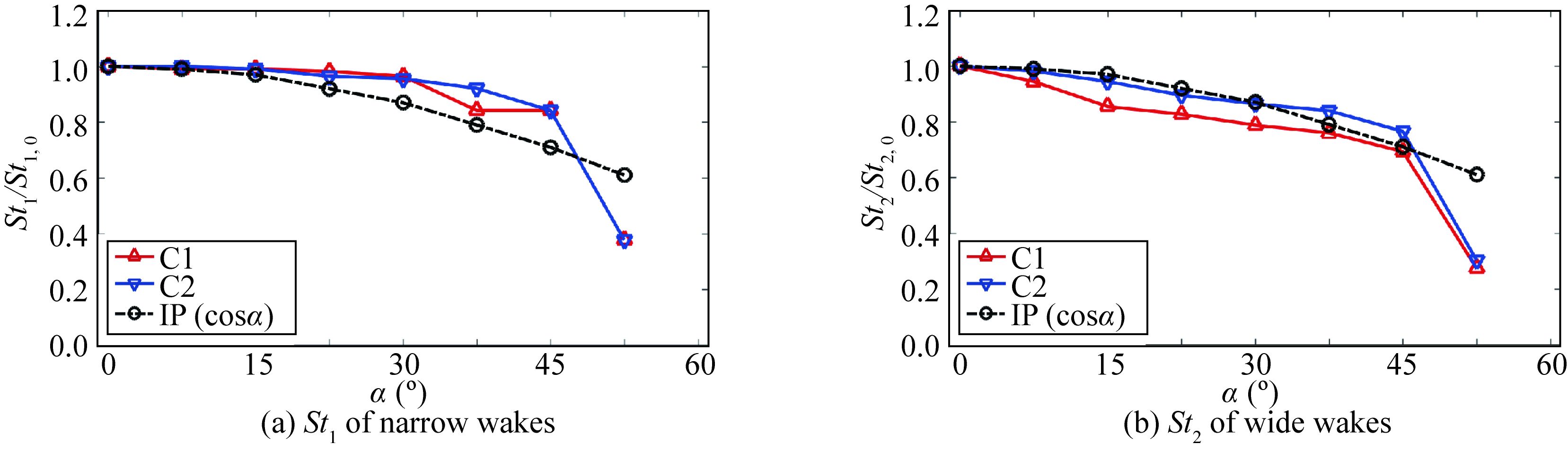
A series of three-dimensional numerical simulations is carried out to investigate the effect of inclined angle on flow behavior behind two side-by-side inclined cylinders at low Reynolds number Re=100 and small spacing ratio T/D=1.5 (T is the center-to-center distance between two side-by-side cylinders, D is the diameter of cylinder). The instantaneous and time-averaged flow fields, force coefficients and Strouhal numbers are analyzed. Special attention is focused on the axial flow characteristics with variation of the inclined angle. The results show that the inclined angle has a significant effect on the gap flow behaviors behind two inclined cylinders. The vortex shedding behind two cylinders is suppressed with the increase of the inclined angle as well as the flip-flop gap flow. Moreover, the mean drag coefficient, root-mean-square lift coefficient and Strouhal numbers decrease monotonously with the increase of the inclined angle, which follows the independent principle at small inclined angles.
A series of three-dimensional numerical simulations is carried out to investigate the effect of inclined angle on flow behavior behind two side-by-side inclined cylinders at low Reynolds number Re=100 and small spacing ratio T/D=1.5 (T is the center-to-center distance between two side-by-side cylinders, D is the diameter of cylinder). The instantaneous and time-averaged flow fields, force coefficients and Strouhal numbers are analyzed. Special attention is focused on the axial flow characteristics with variation of the inclined angle. The results show that the inclined angle has a significant effect on the gap flow behaviors behind two inclined cylinders. The vortex shedding behind two cylinders is suppressed with the increase of the inclined angle as well as the flip-flop gap flow. Moreover, the mean drag coefficient, root-mean-square lift coefficient and Strouhal numbers decrease monotonously with the increase of the inclined angle, which follows the independent principle at small inclined angles.

2019, 33(3): 356-364.
doi: 10.1007/s13344-019-0034-4
Abstract:
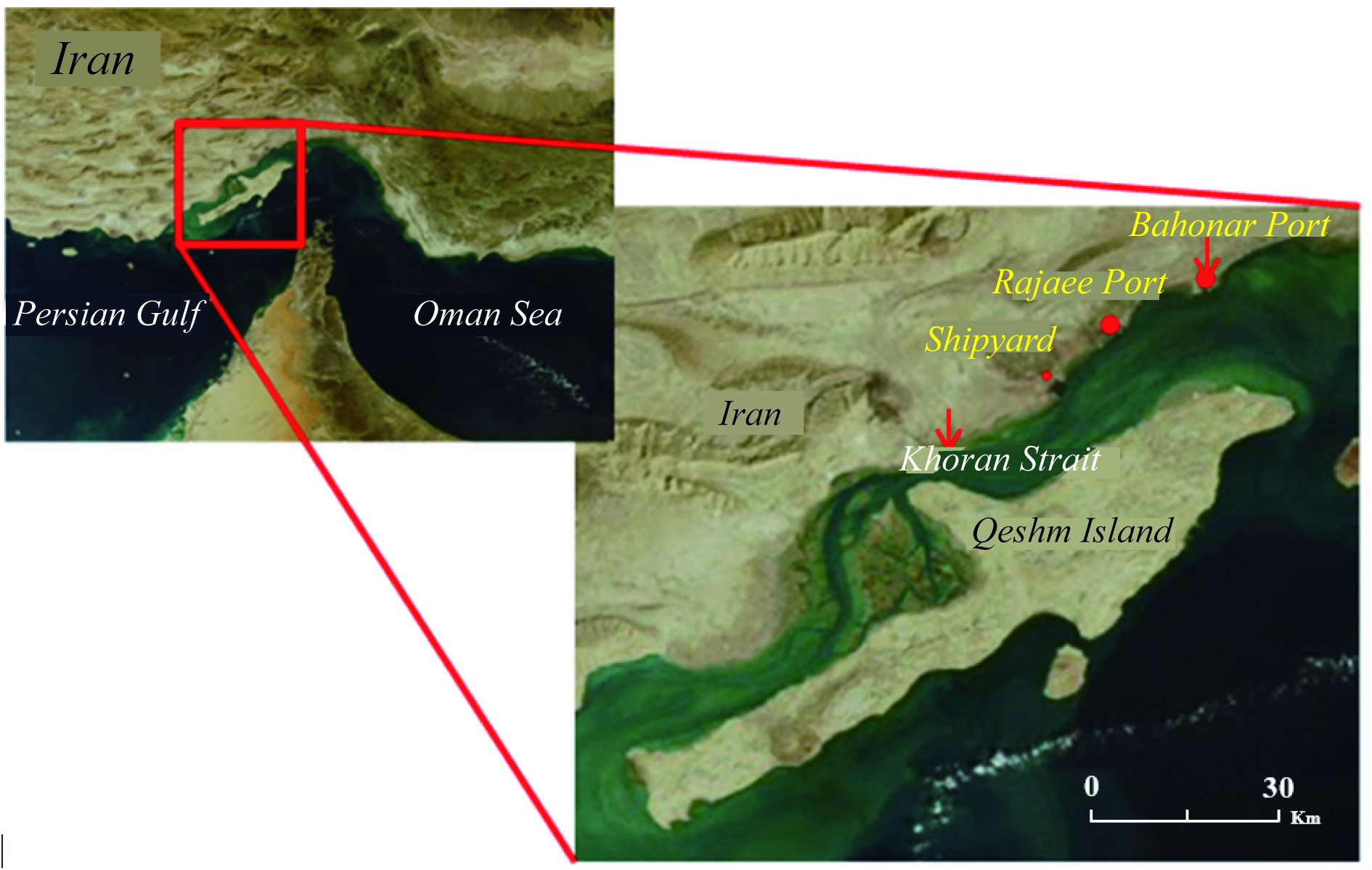
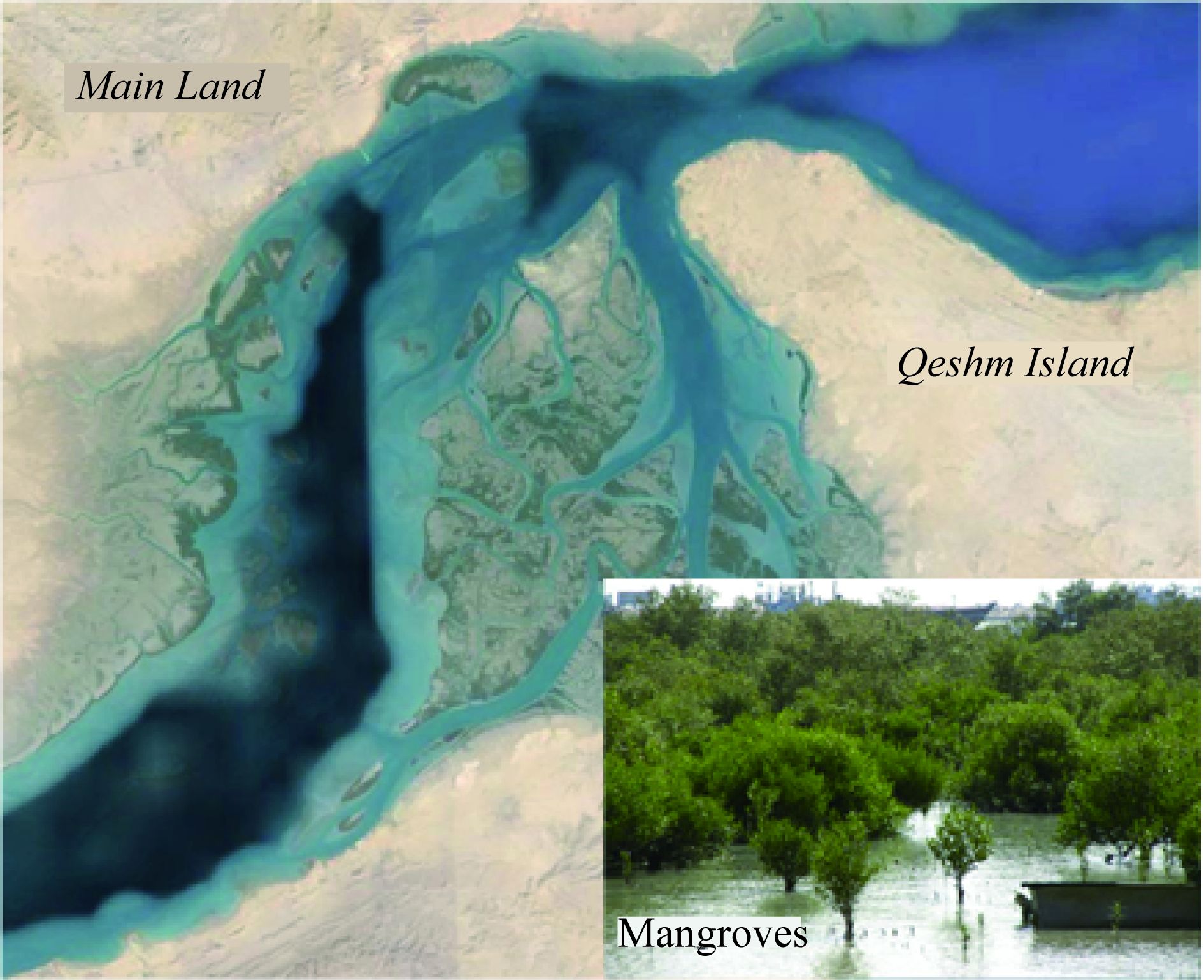
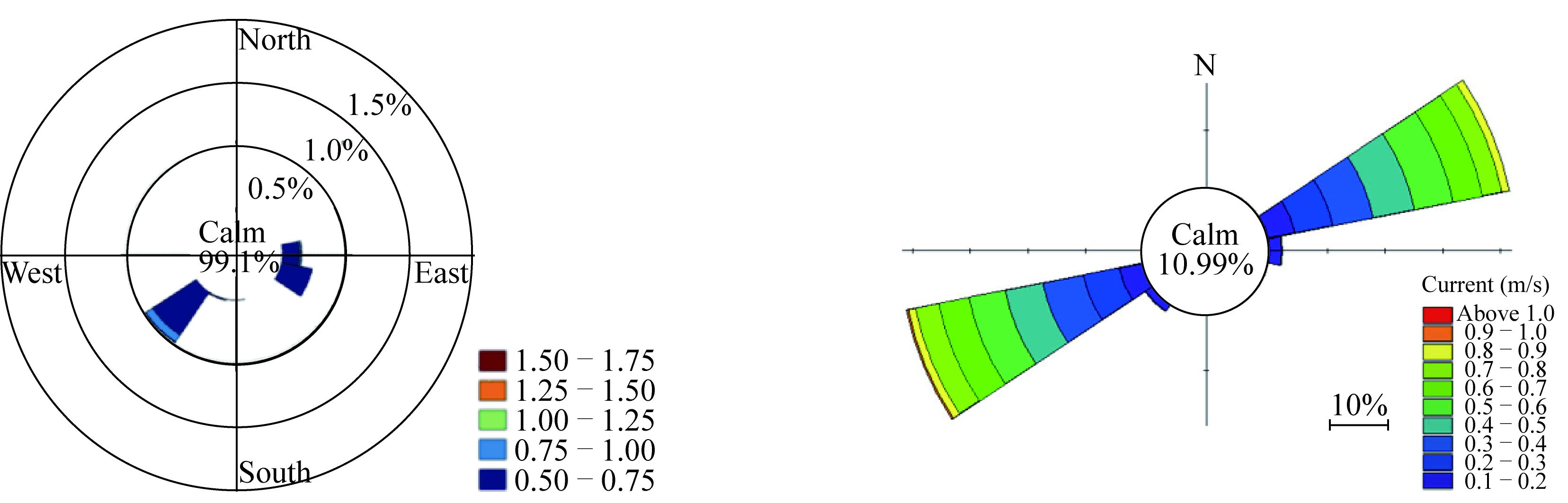
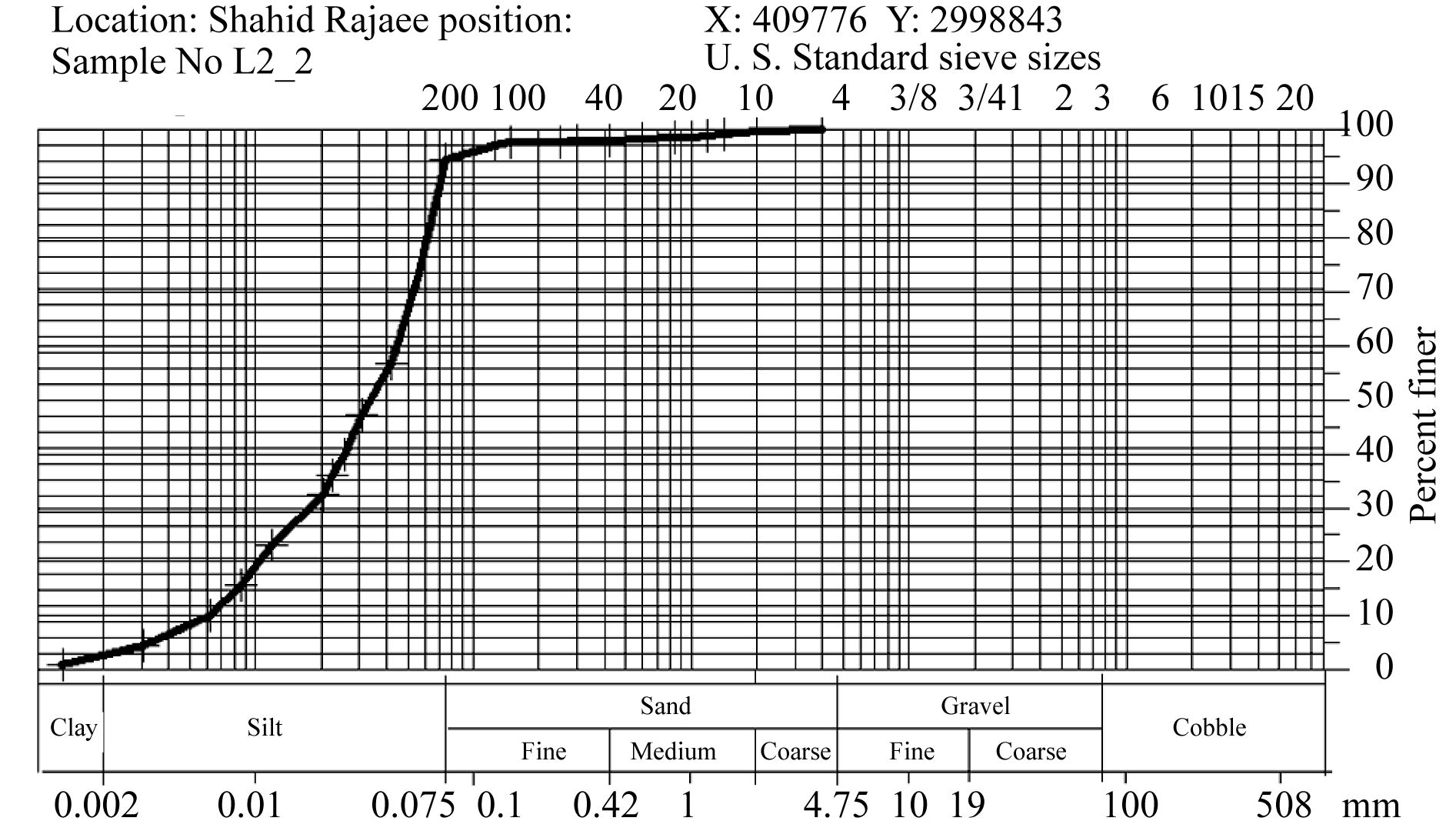
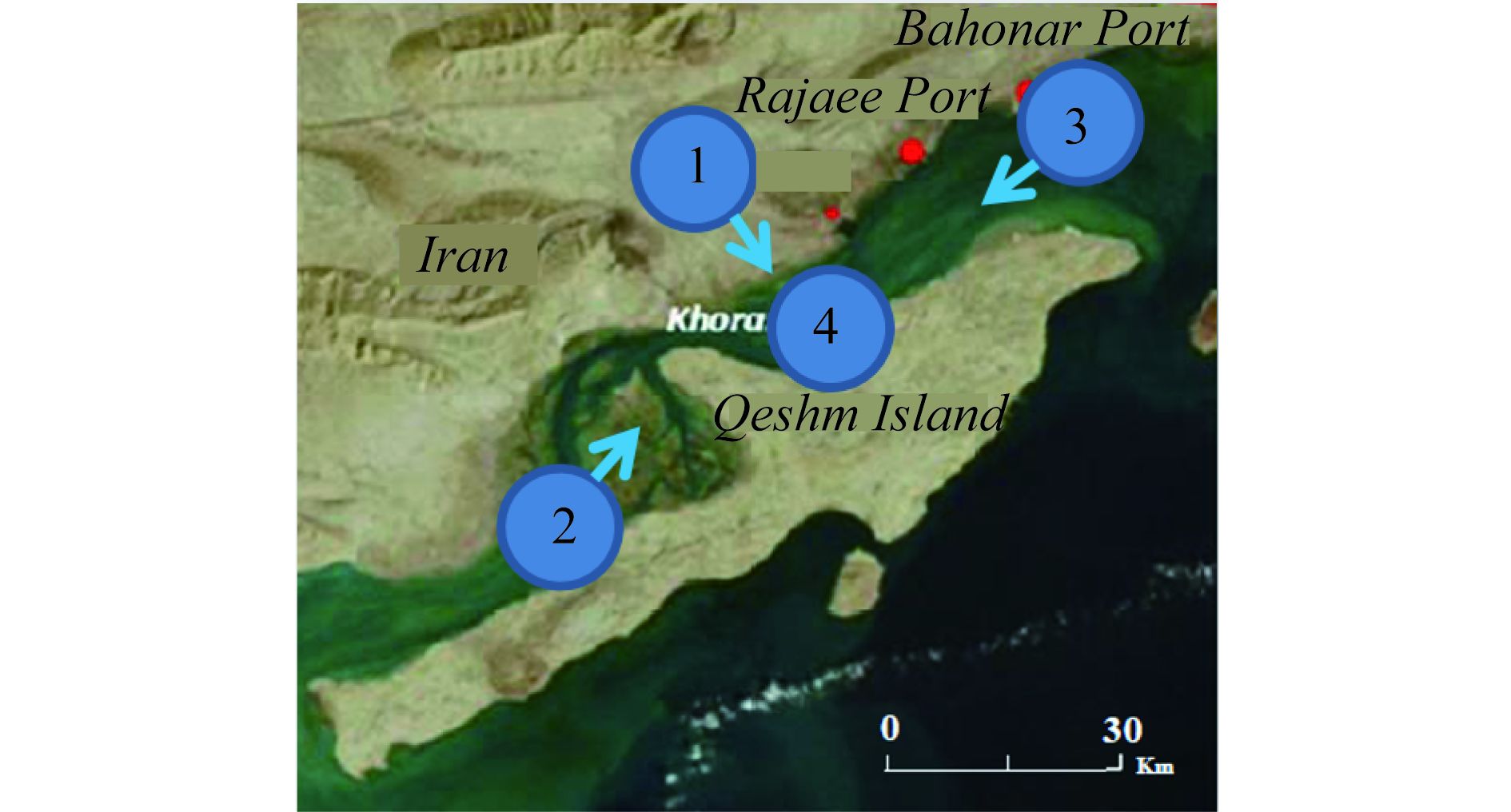
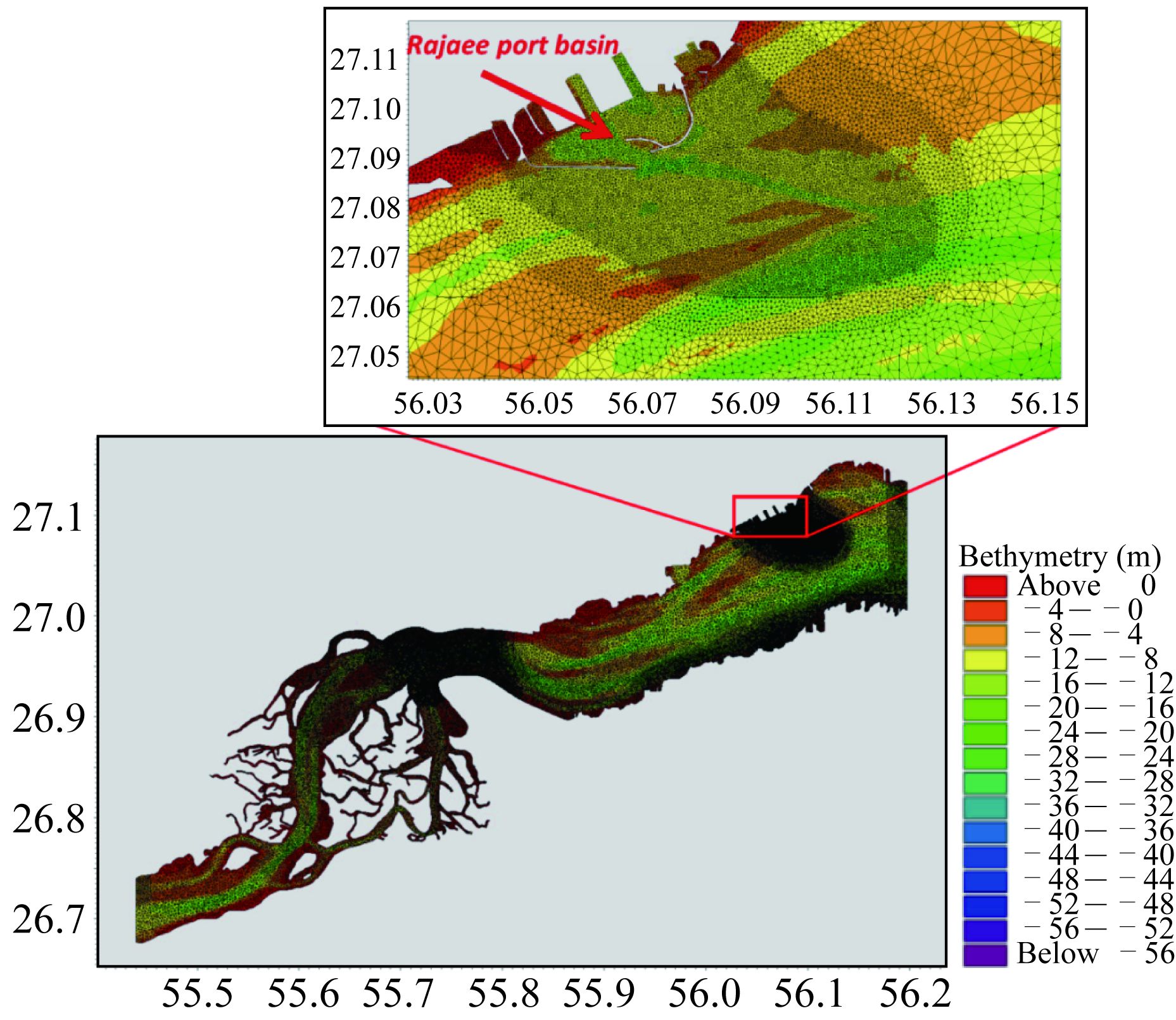
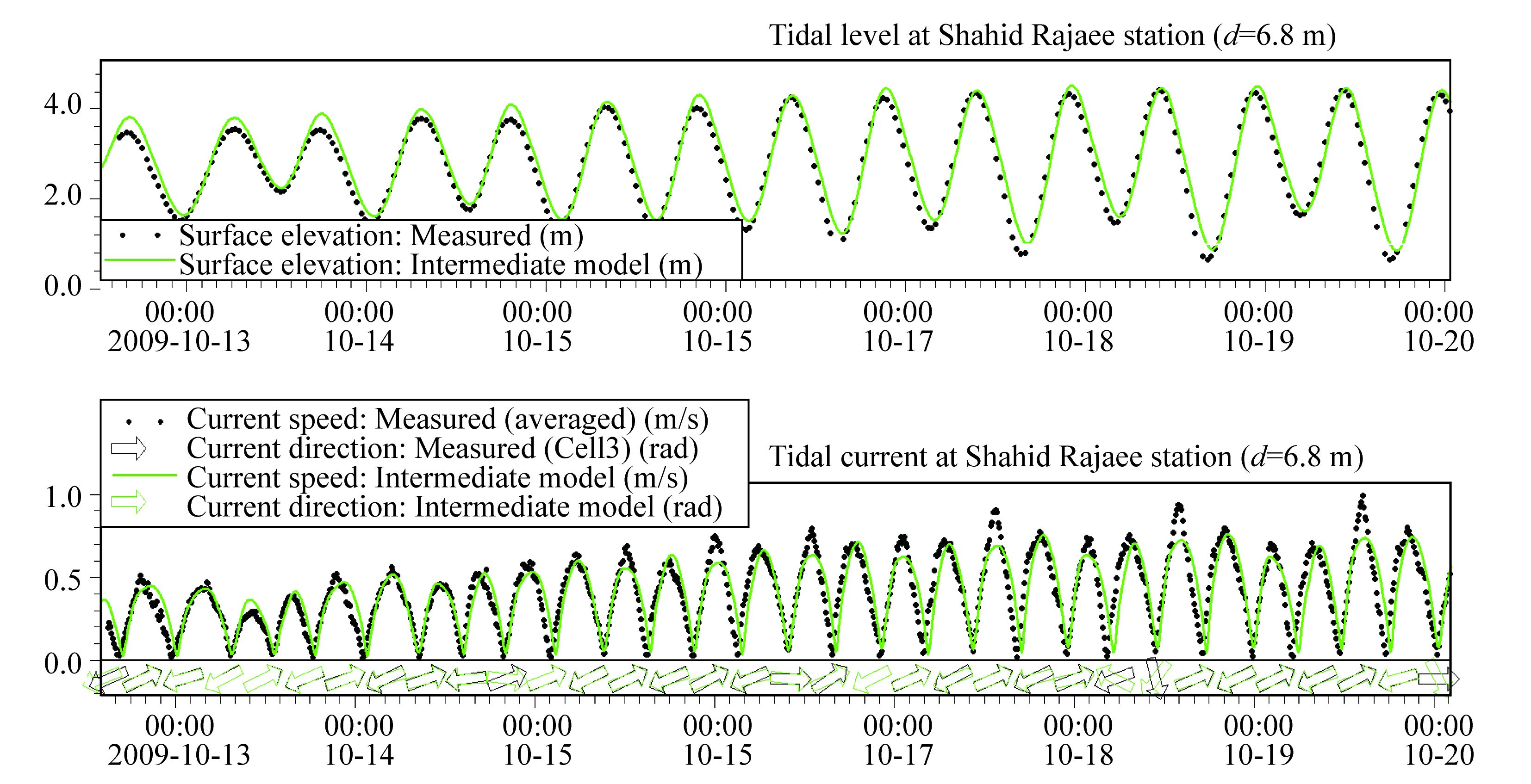
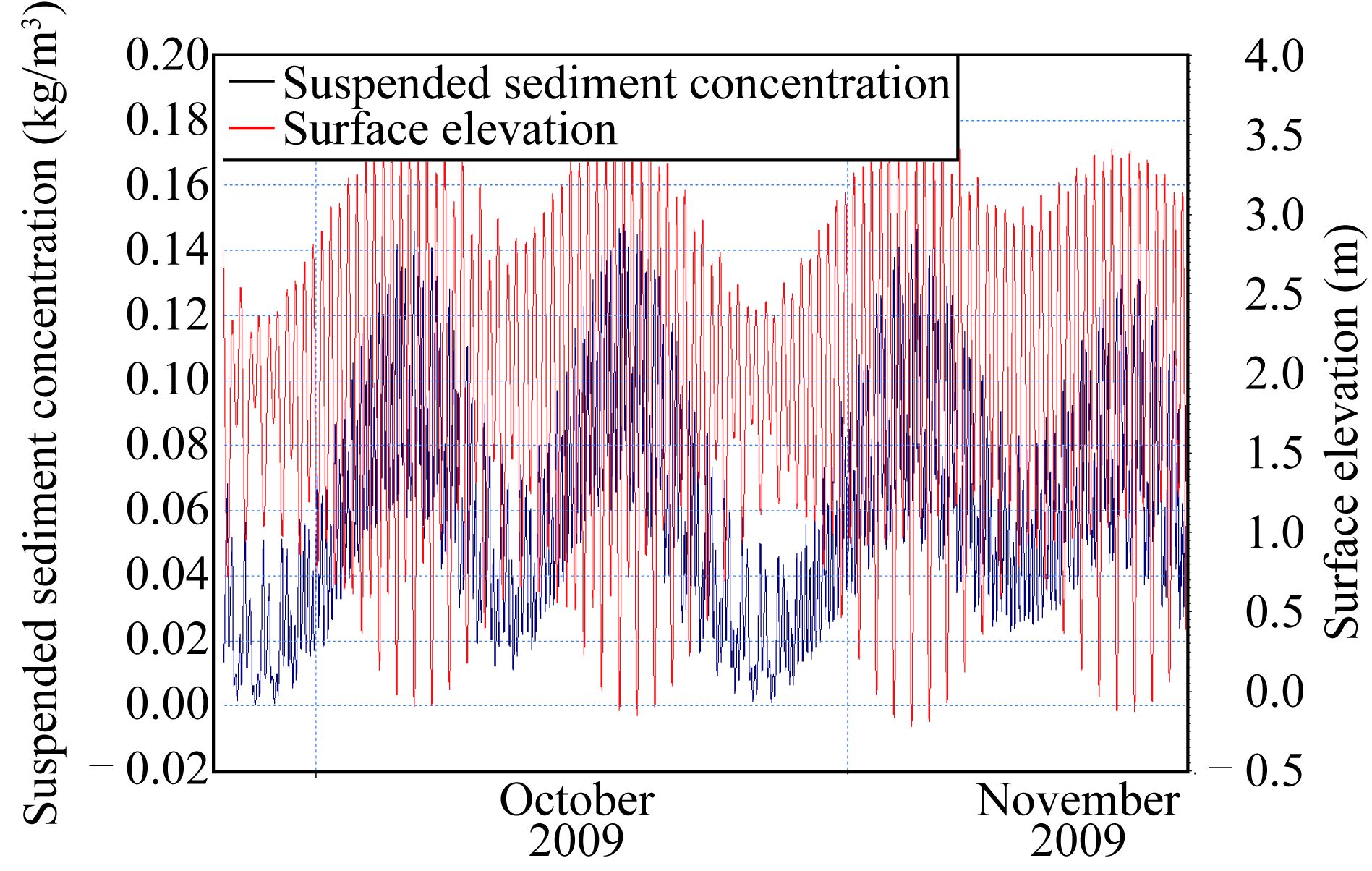
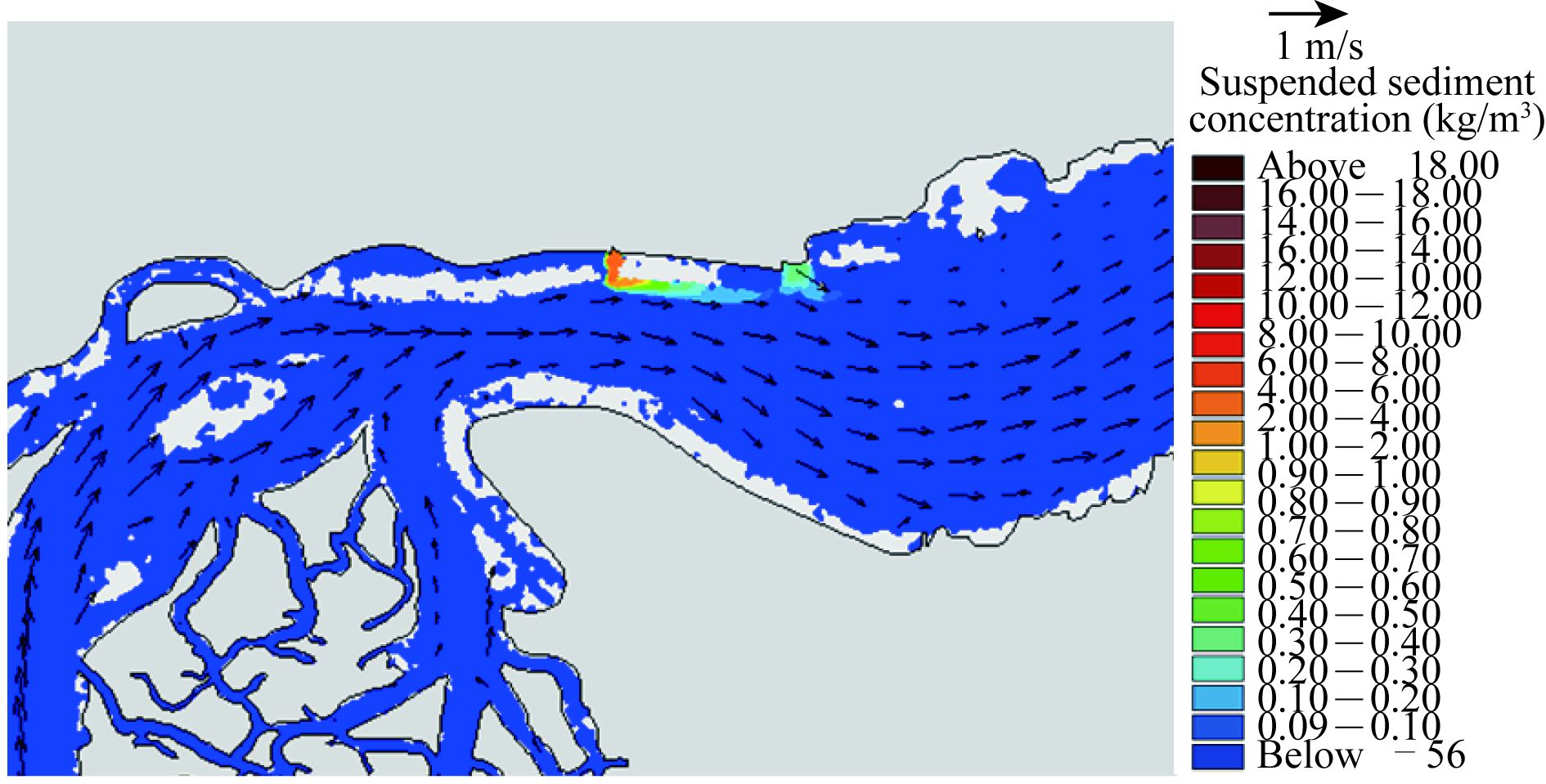
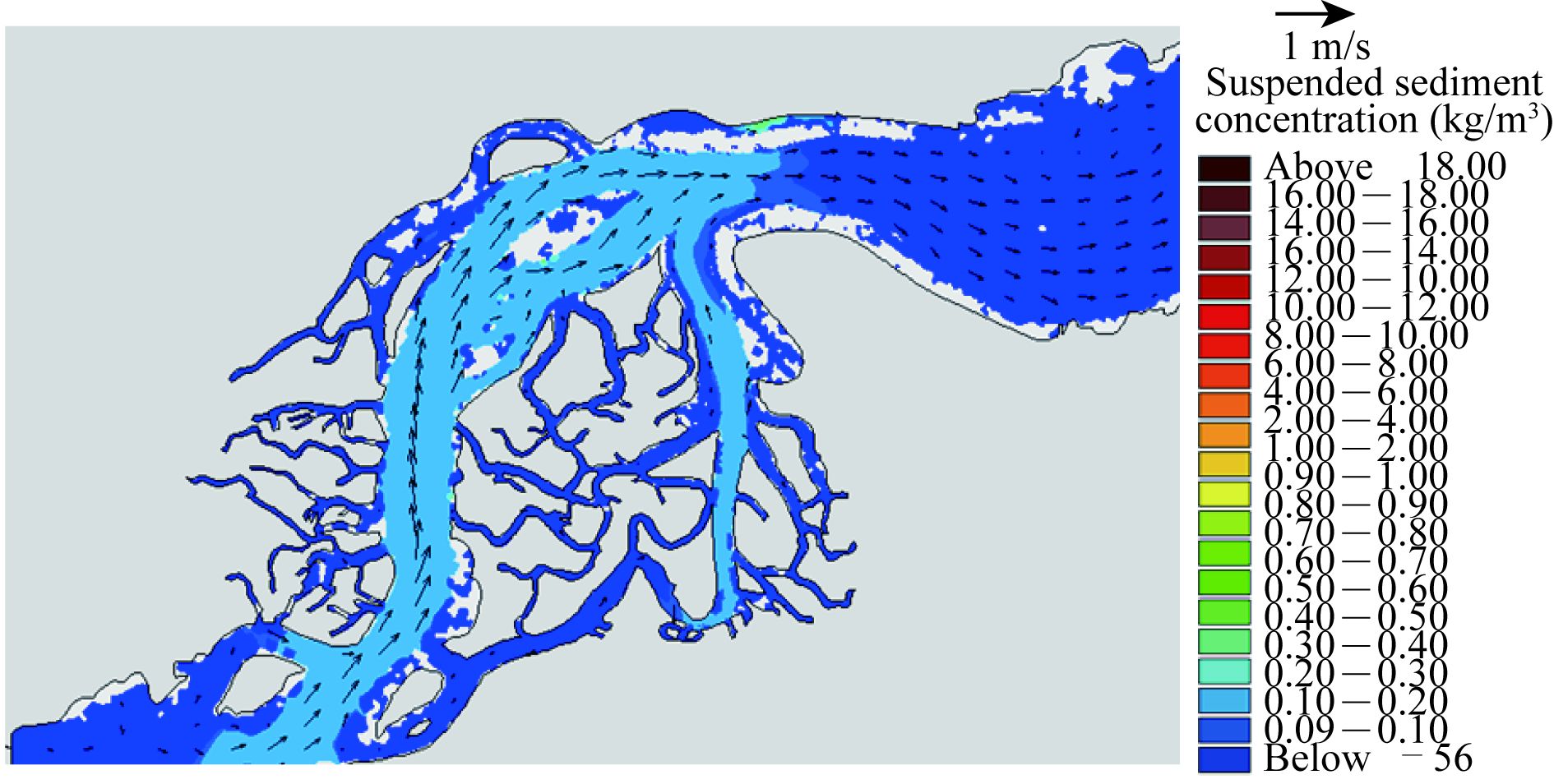
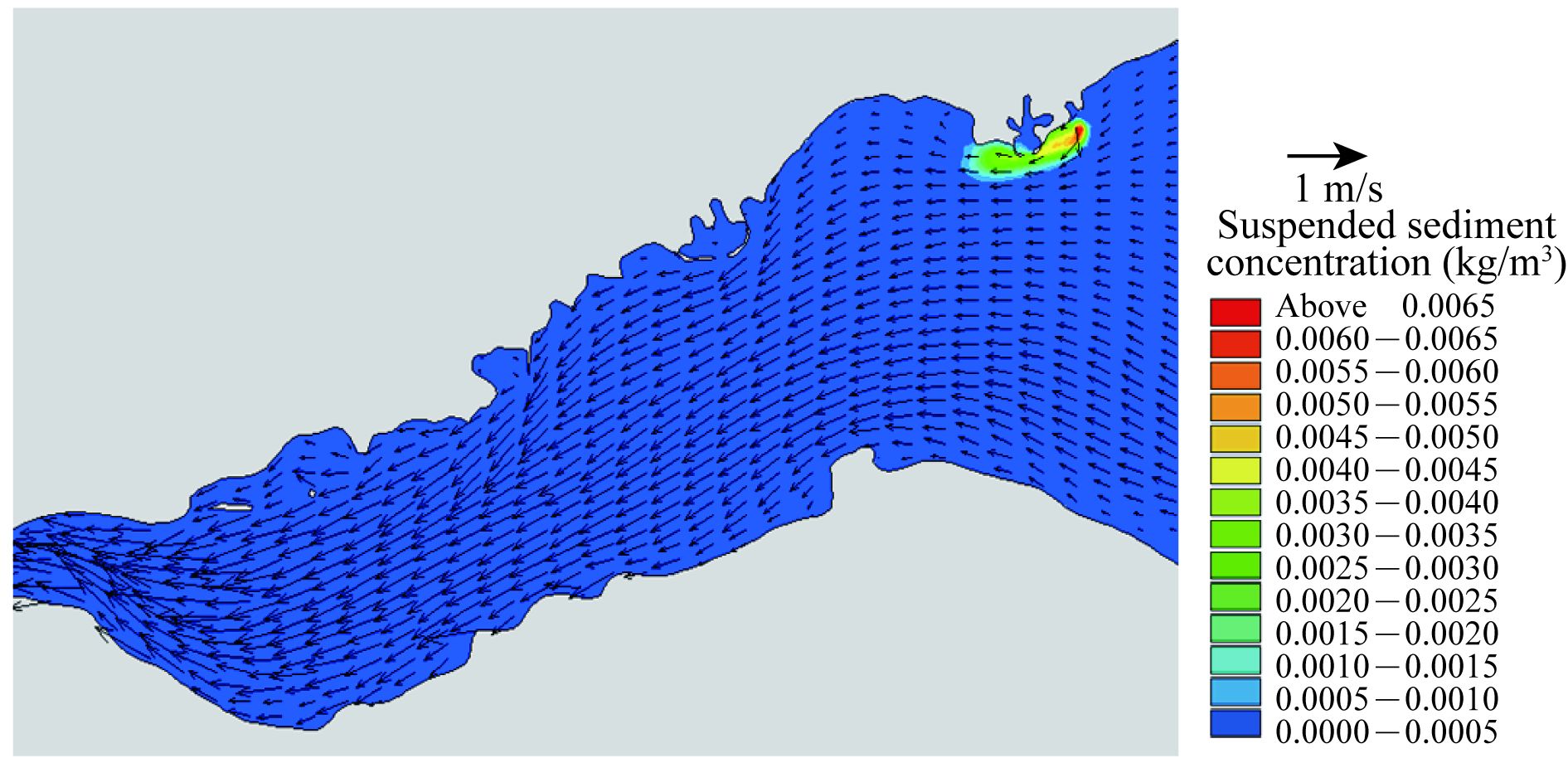
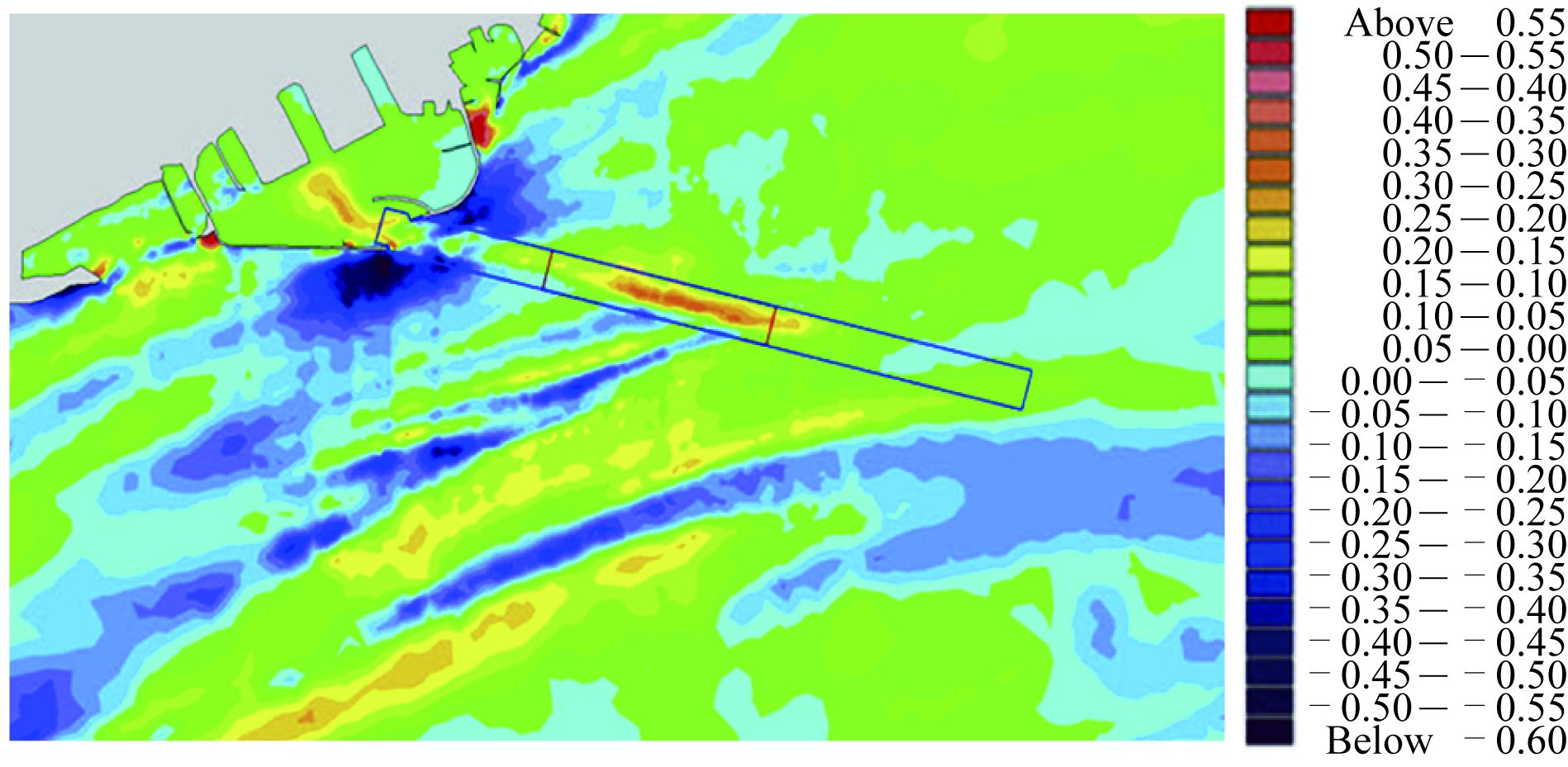
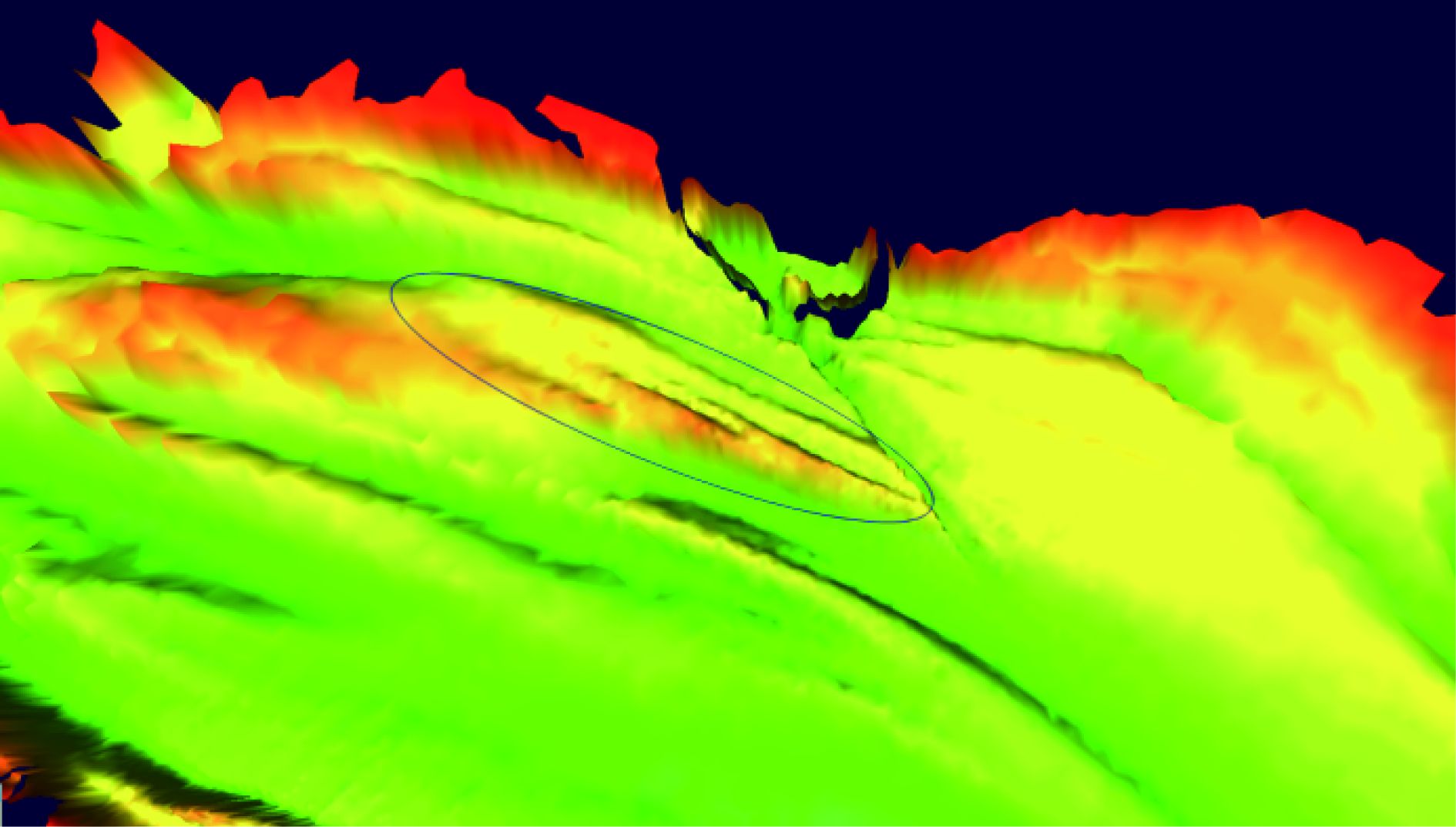
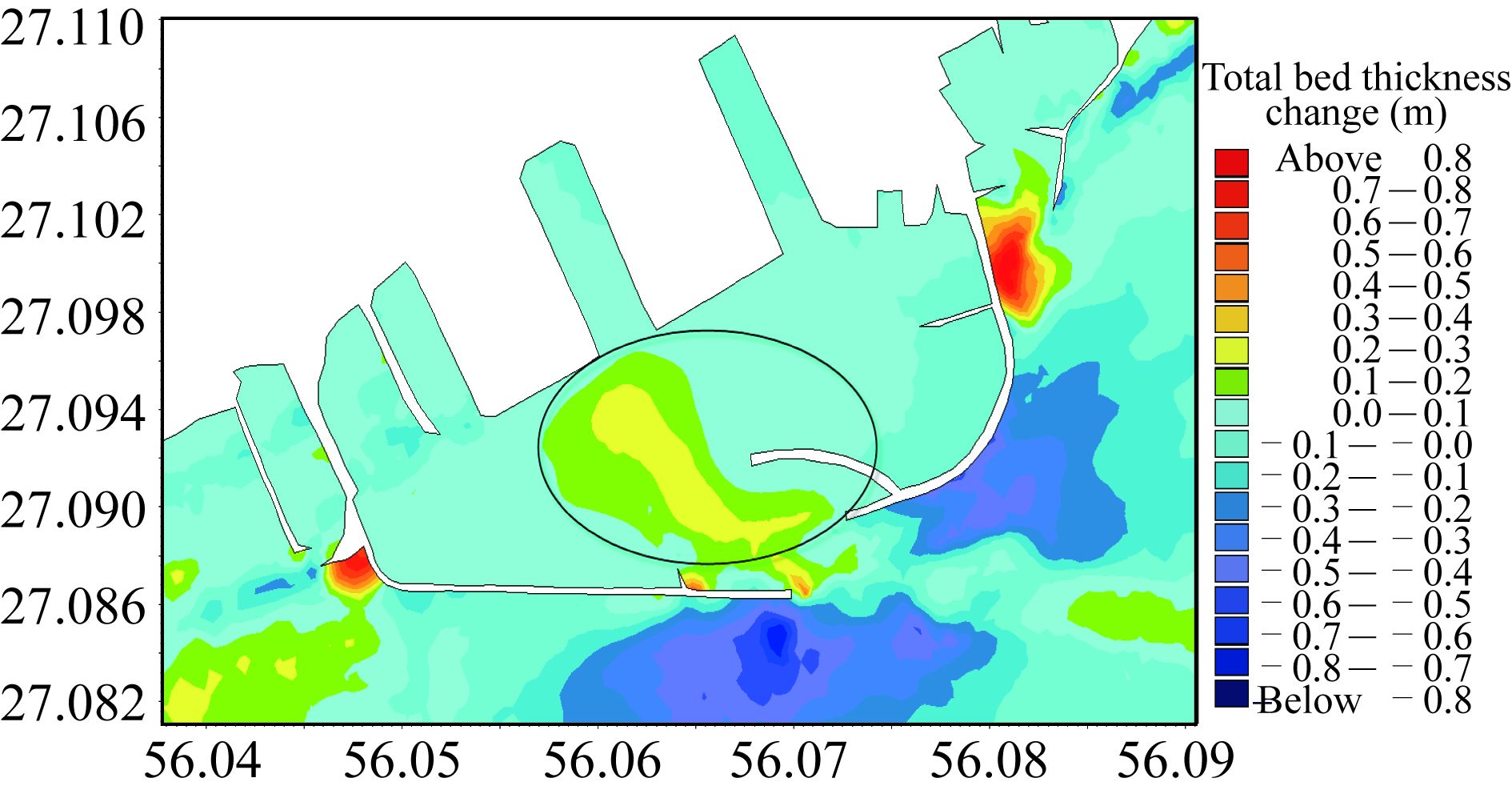
In this article, the sediment transport processes in the Khuran Strait between the mainland Iran and Qeshm Island at North Central Persian Gulf are studied in regional scale in a comprehensive manner. The objectives of this study include defining the type and origin of the sediment, the influencing factors, and the dominant mode of sediment transport. Four possible scenarios of sediment processes in terms of sediment sources and influential environmental forces are examined. The results of the conceptual and 2D numerical model of MIKE21 applied for this purposes indicate that the sediment sources in the transport processes are mainly provided by the sediments suspended from the central and eastern zones of the strait bed. Other sources including input from rivers do not have direct influence on the processes. The results are applied to the study of morphological changes for engineering applications including the pattern and amount of deposit in the Rajaee port approach channel and harbor basin. The pattern and amount of annual sediment deposits in the approach channel predicted by the model is satisfactory, compatible with annual dredging records.
In this article, the sediment transport processes in the Khuran Strait between the mainland Iran and Qeshm Island at North Central Persian Gulf are studied in regional scale in a comprehensive manner. The objectives of this study include defining the type and origin of the sediment, the influencing factors, and the dominant mode of sediment transport. Four possible scenarios of sediment processes in terms of sediment sources and influential environmental forces are examined. The results of the conceptual and 2D numerical model of MIKE21 applied for this purposes indicate that the sediment sources in the transport processes are mainly provided by the sediments suspended from the central and eastern zones of the strait bed. Other sources including input from rivers do not have direct influence on the processes. The results are applied to the study of morphological changes for engineering applications including the pattern and amount of deposit in the Rajaee port approach channel and harbor basin. The pattern and amount of annual sediment deposits in the approach channel predicted by the model is satisfactory, compatible with annual dredging records.



2019, 33(3): 365-372.
doi: 10.1007/s13344-019-0035-3
Abstract:
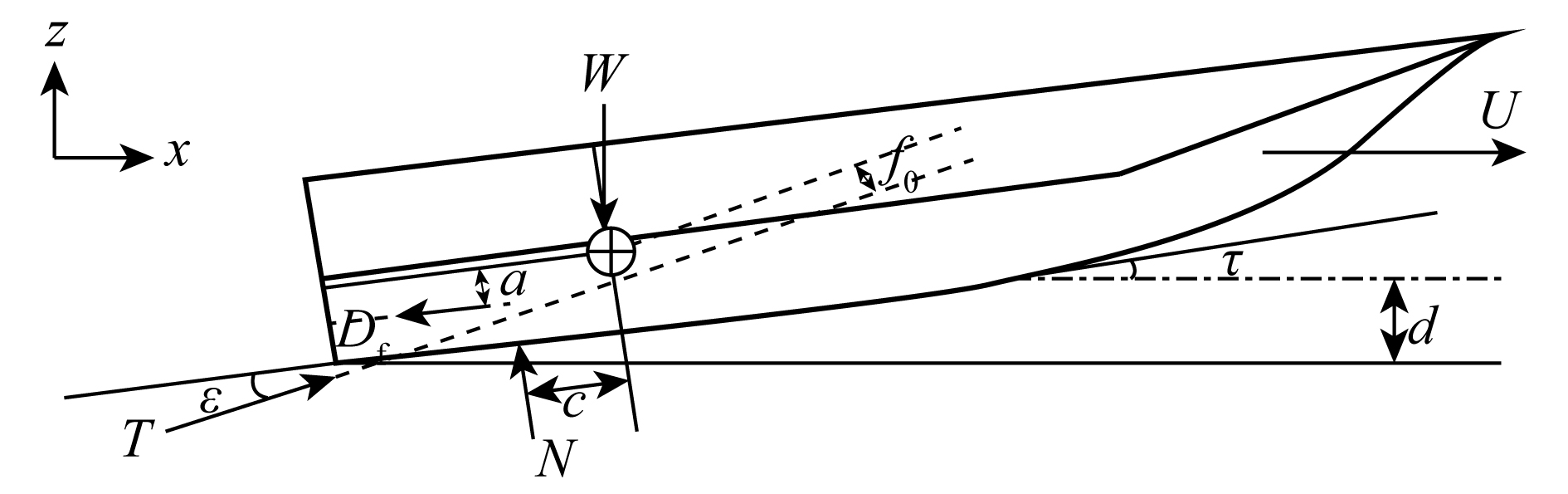
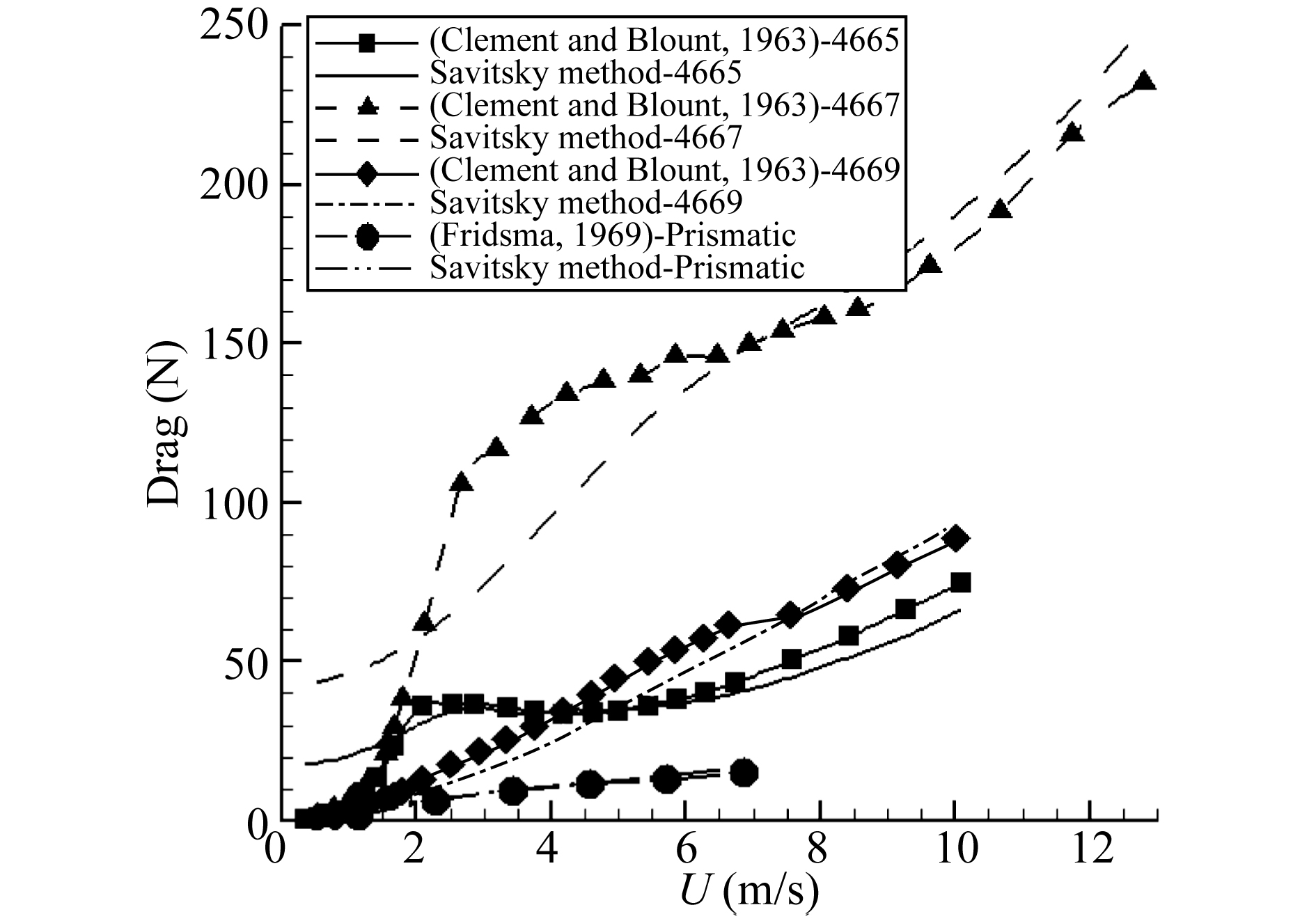
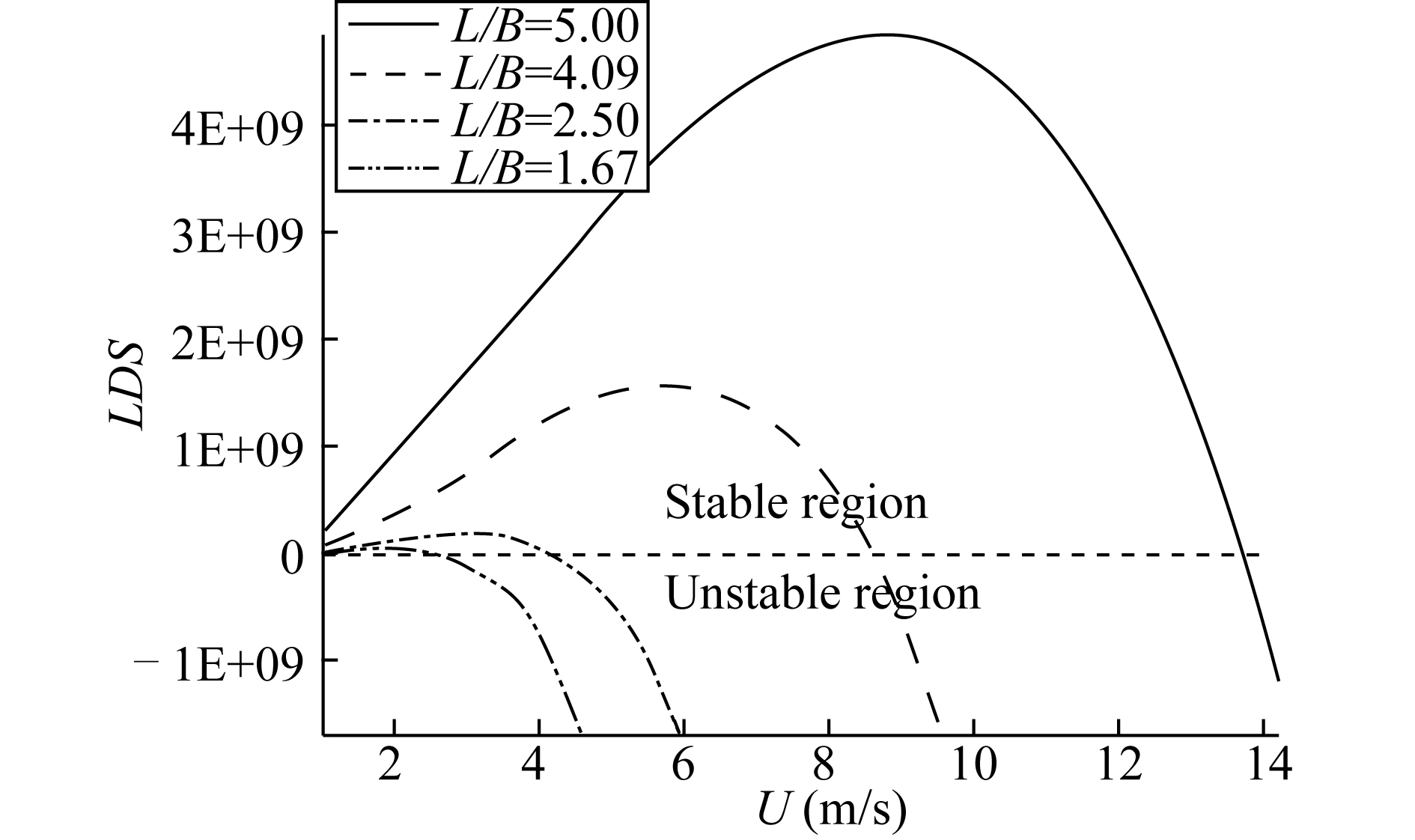
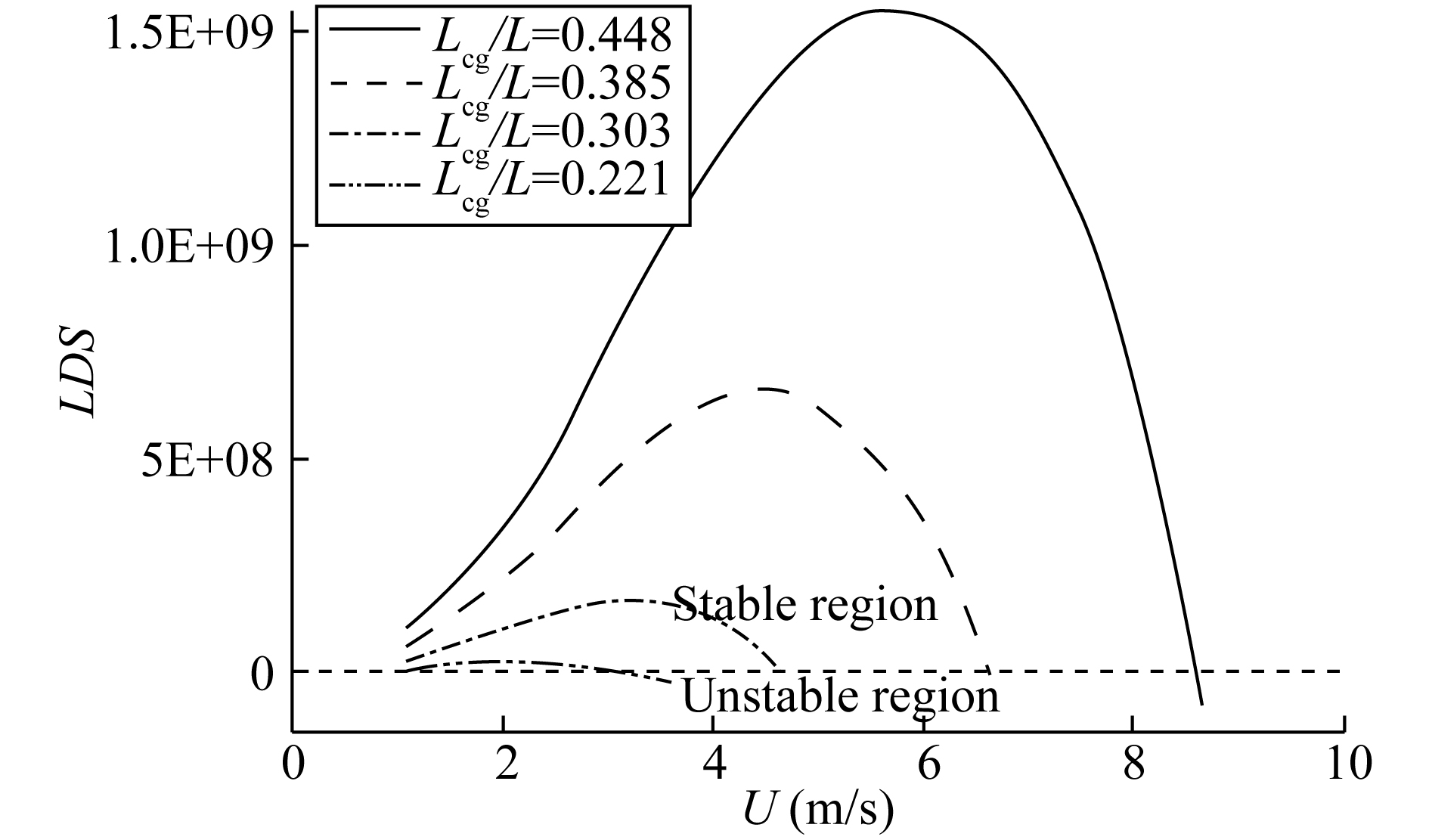
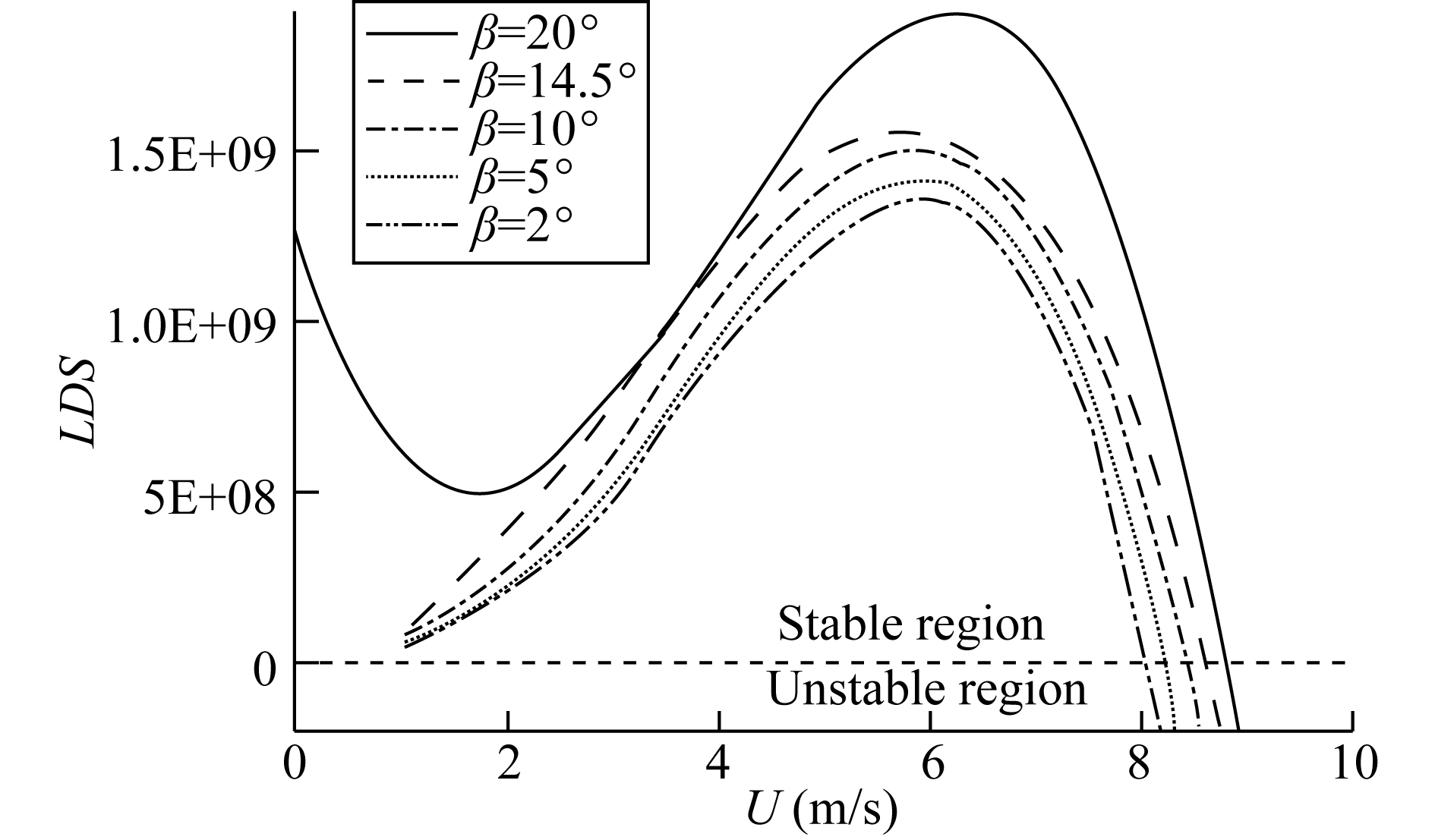
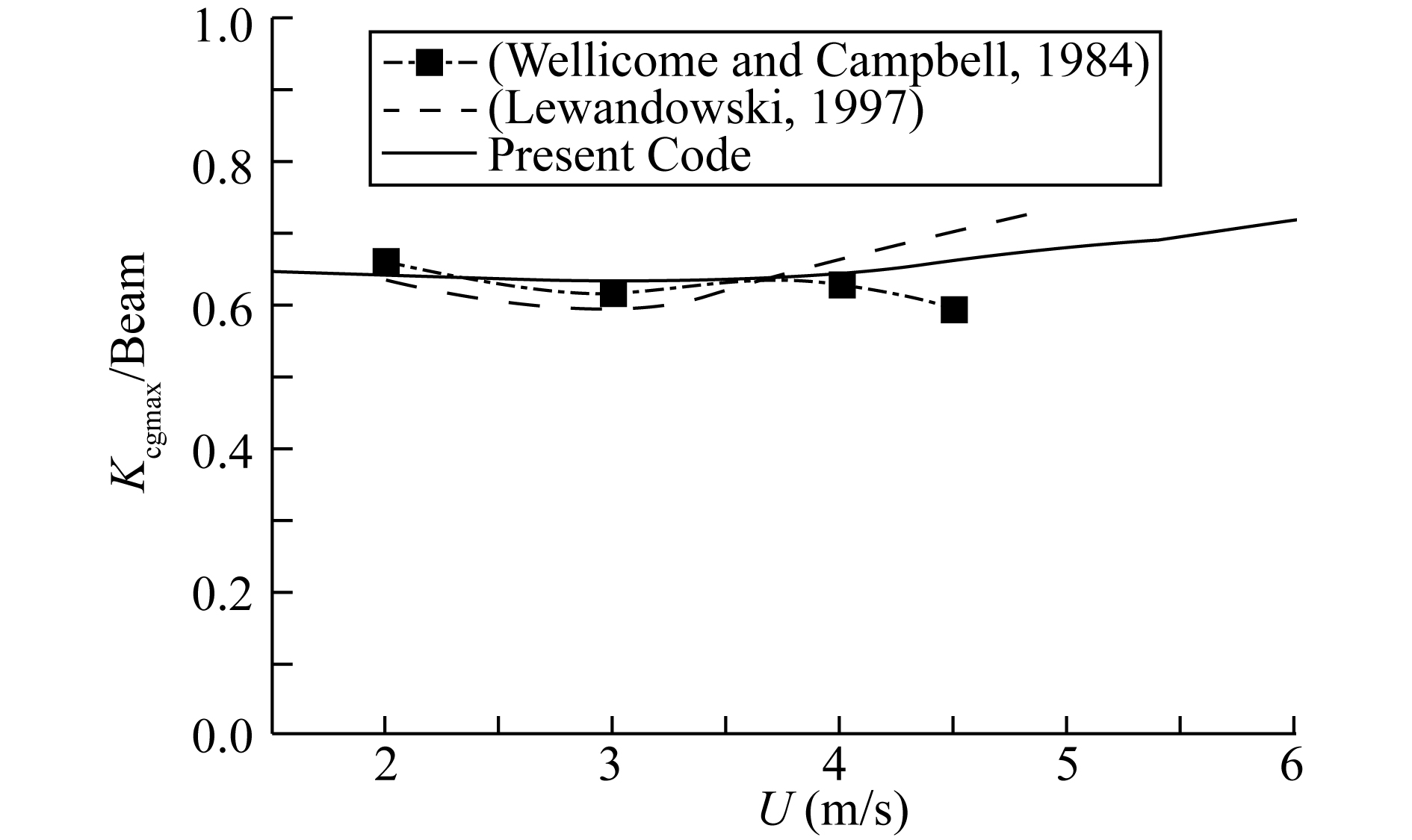
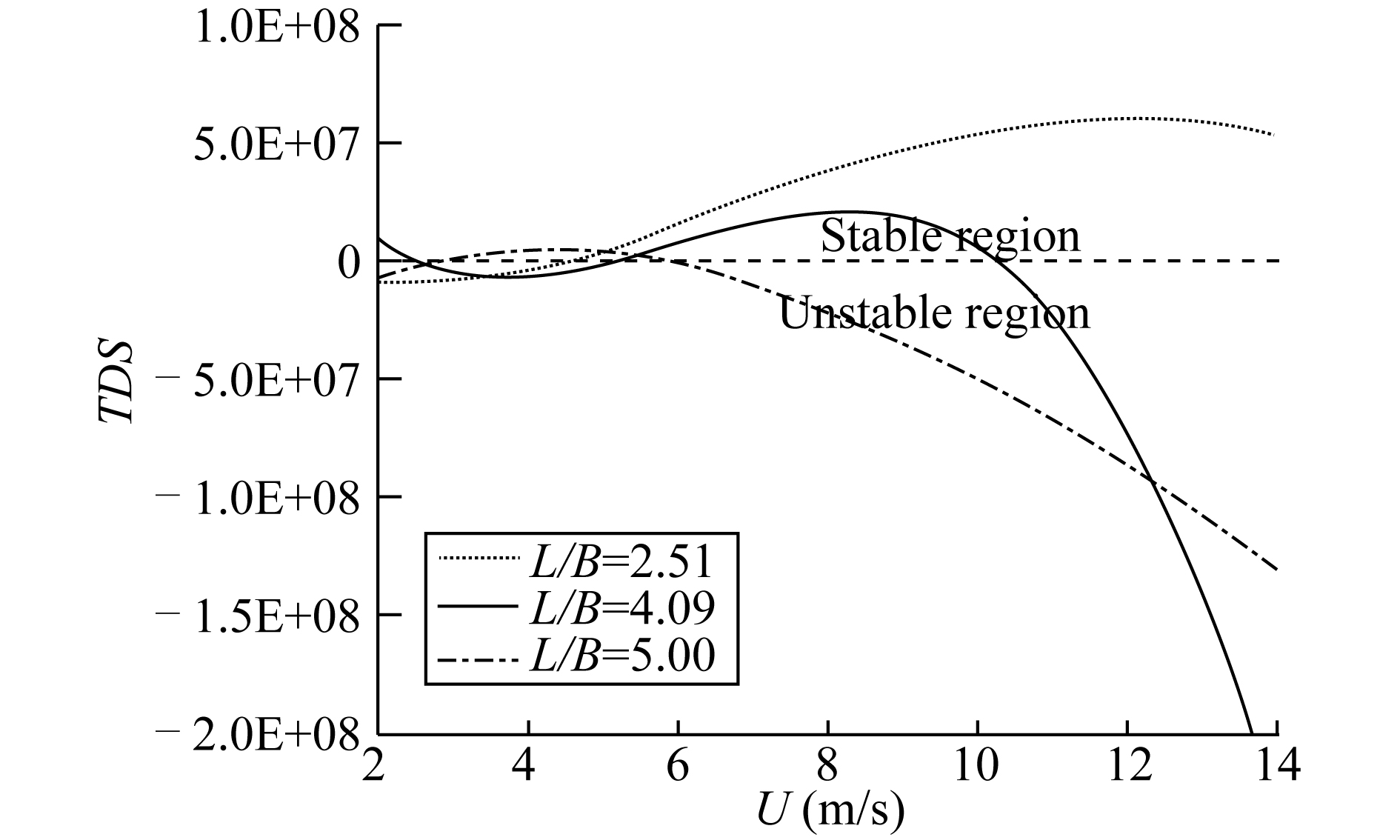
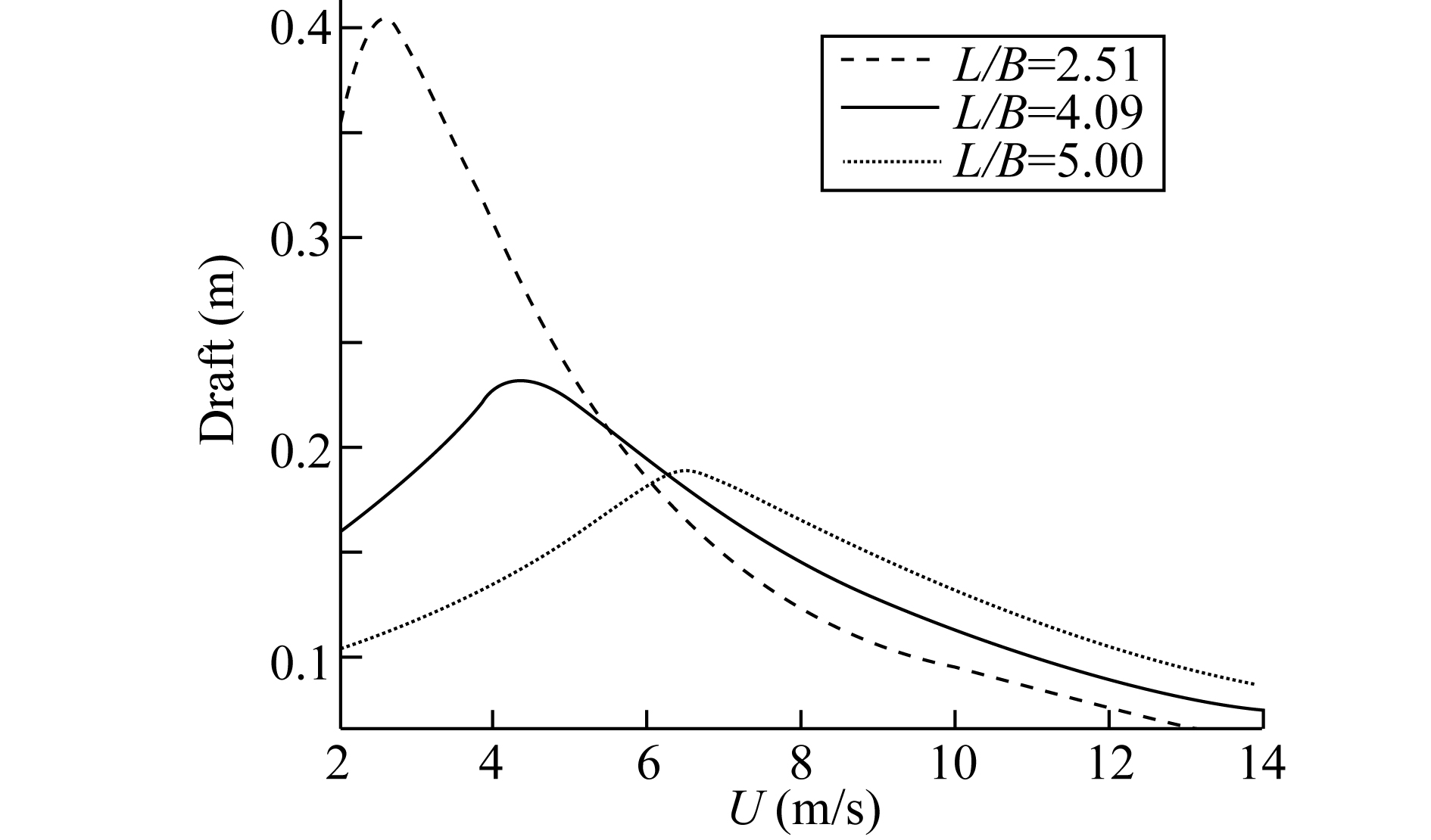
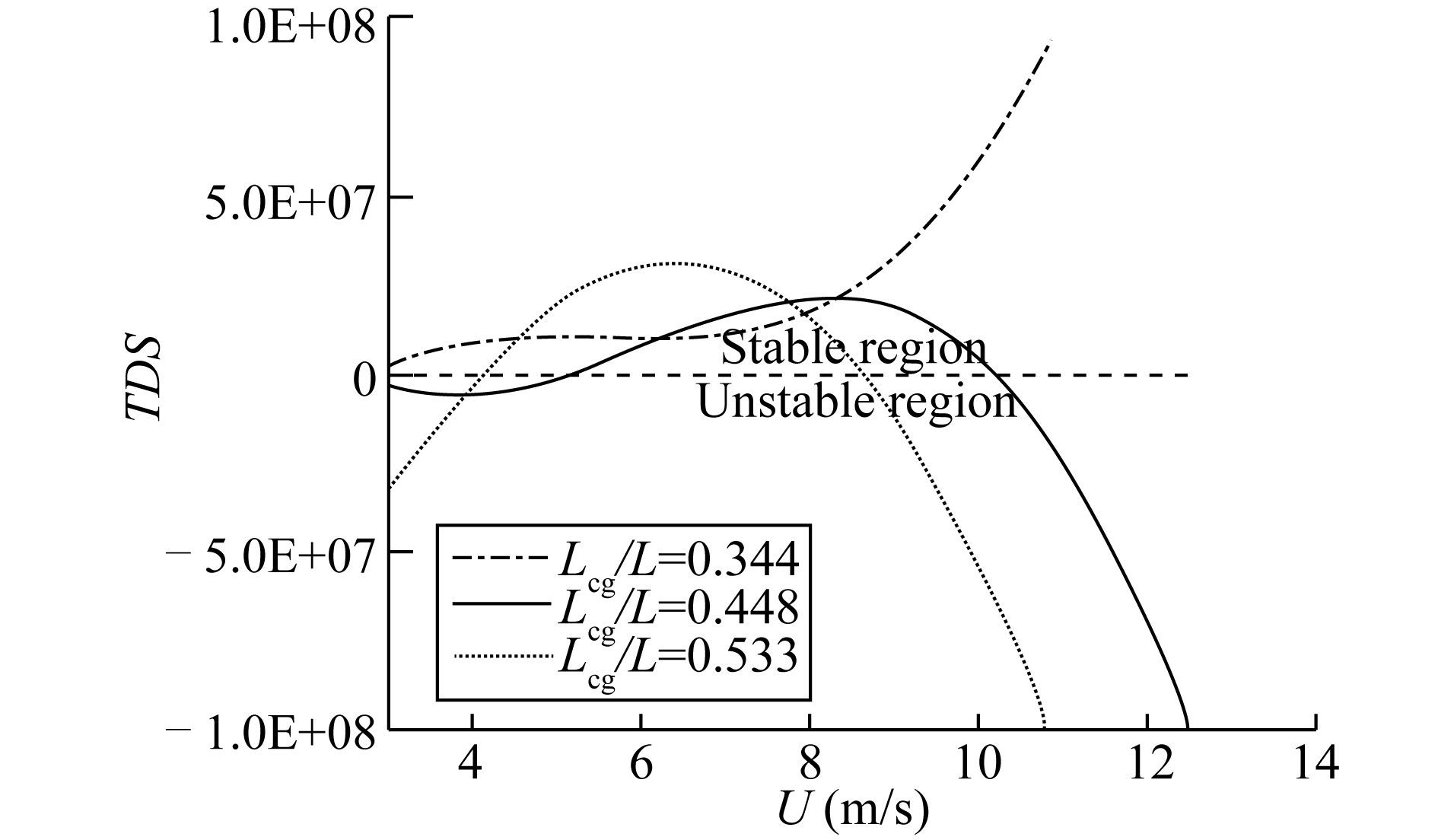
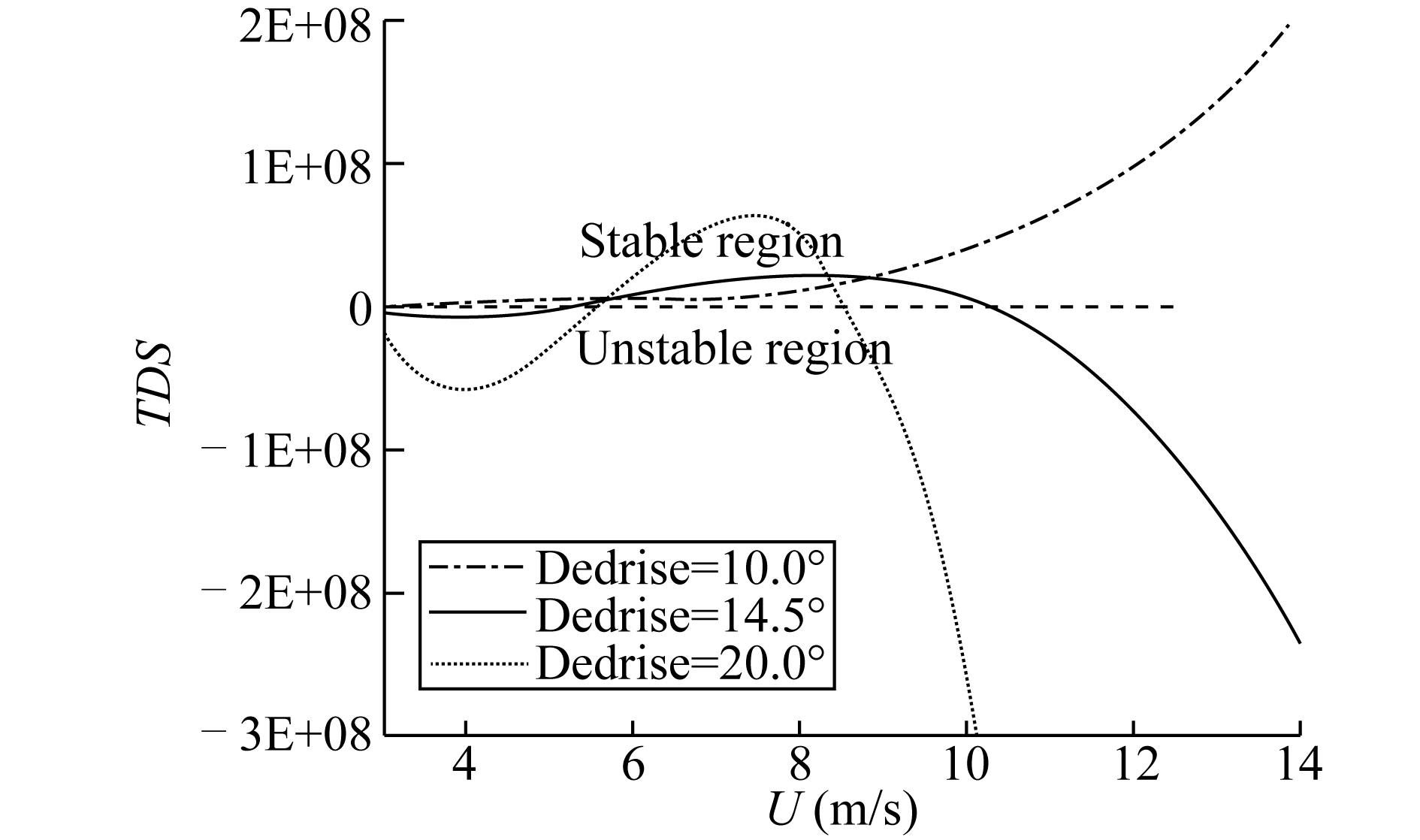
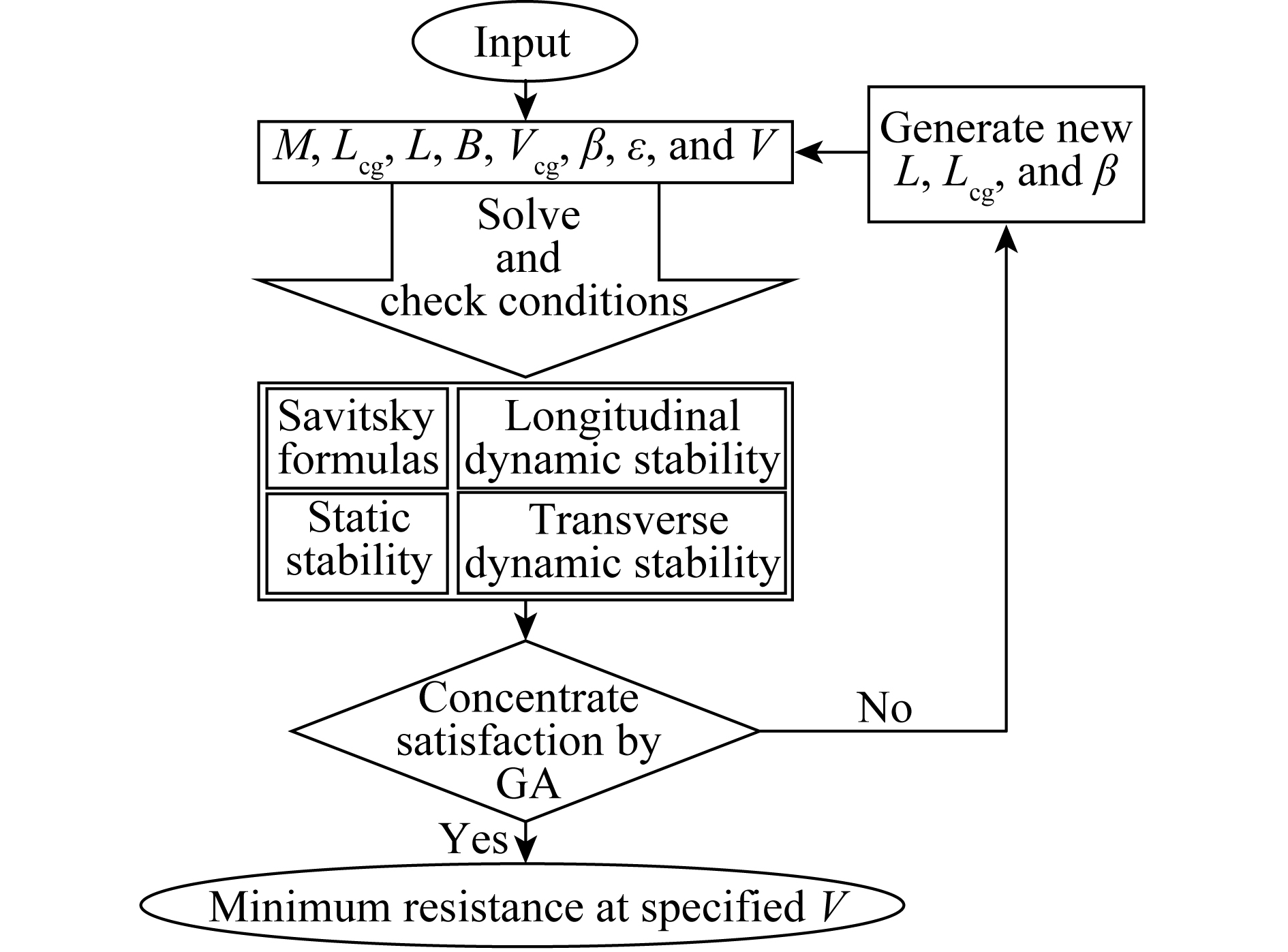
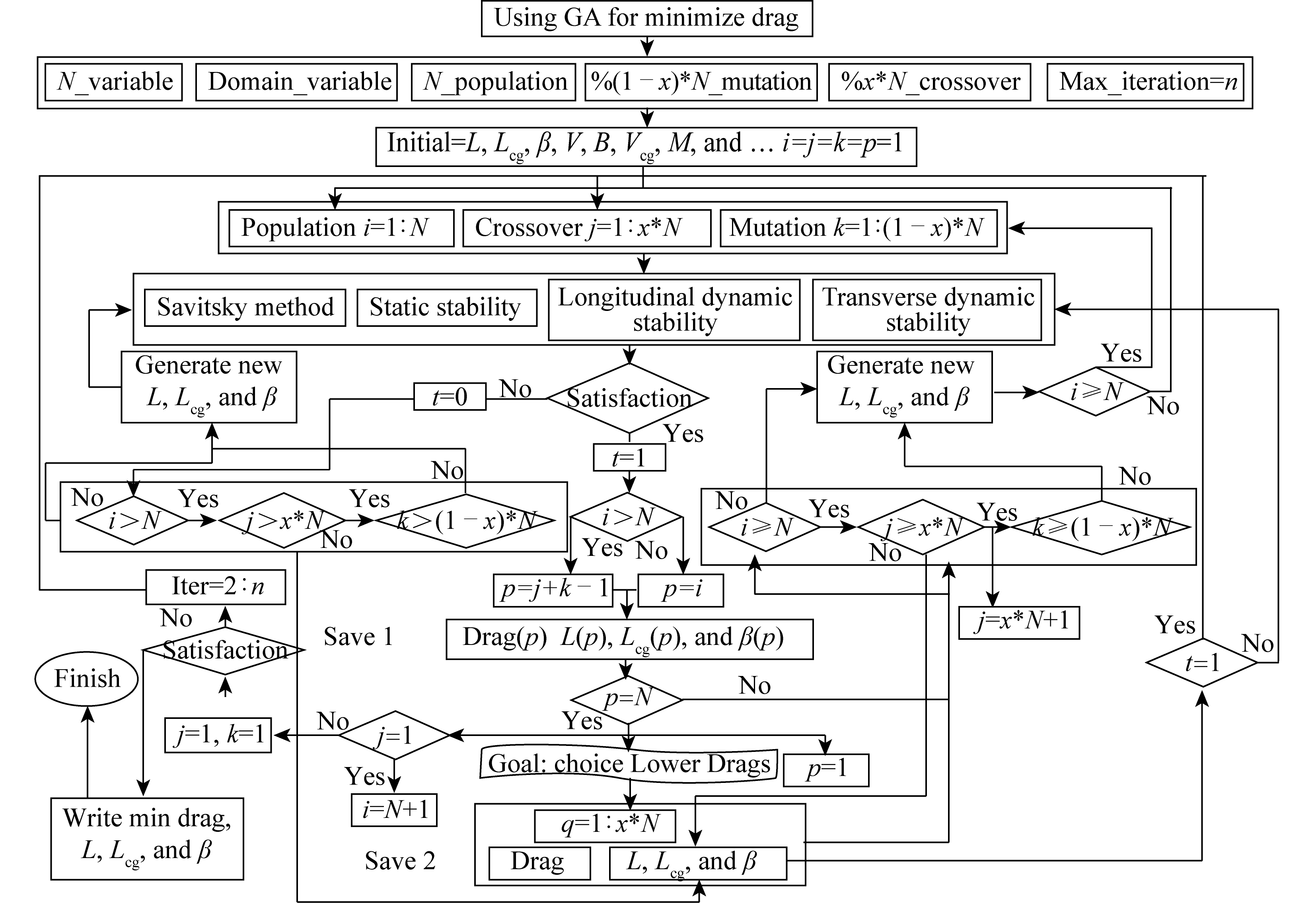
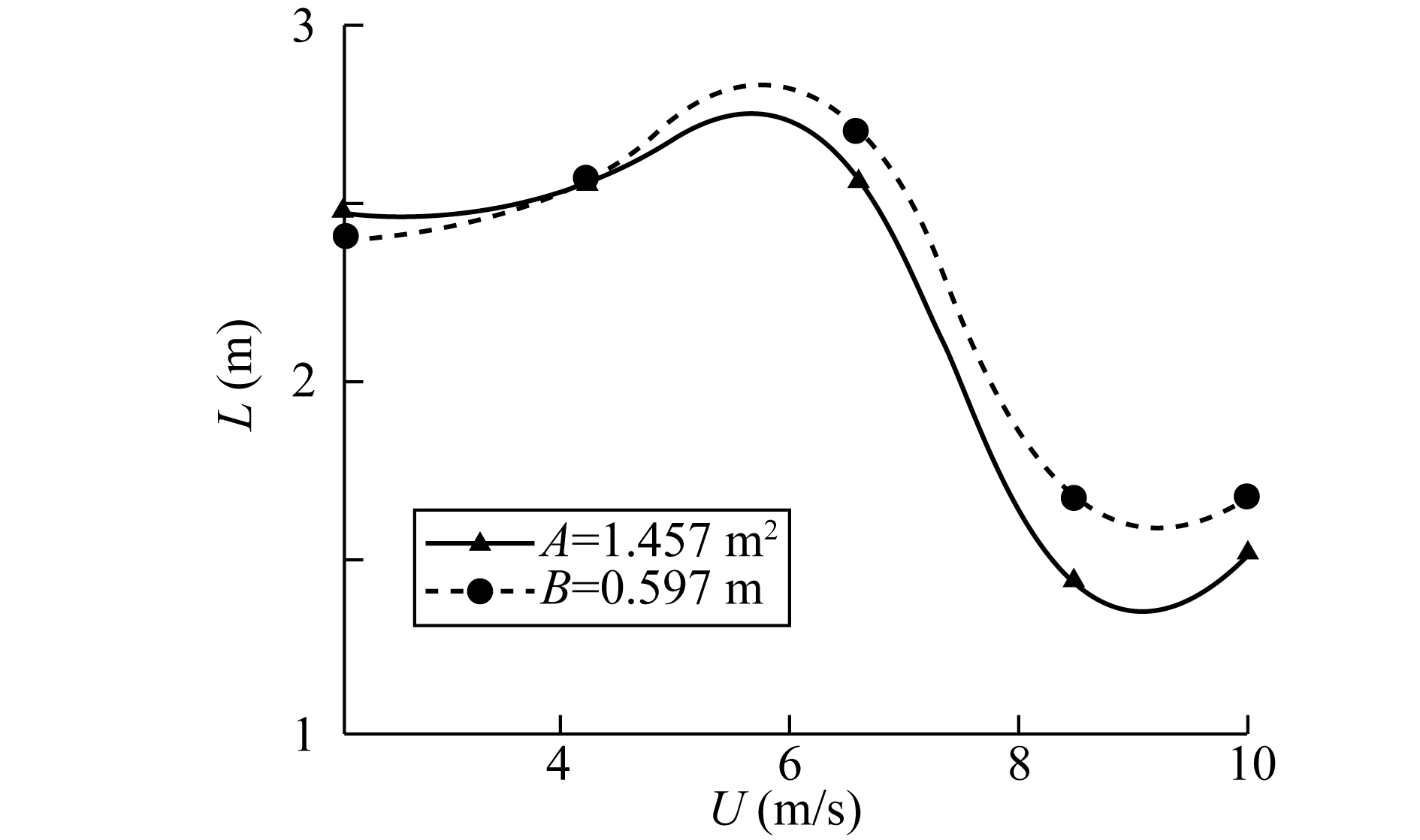
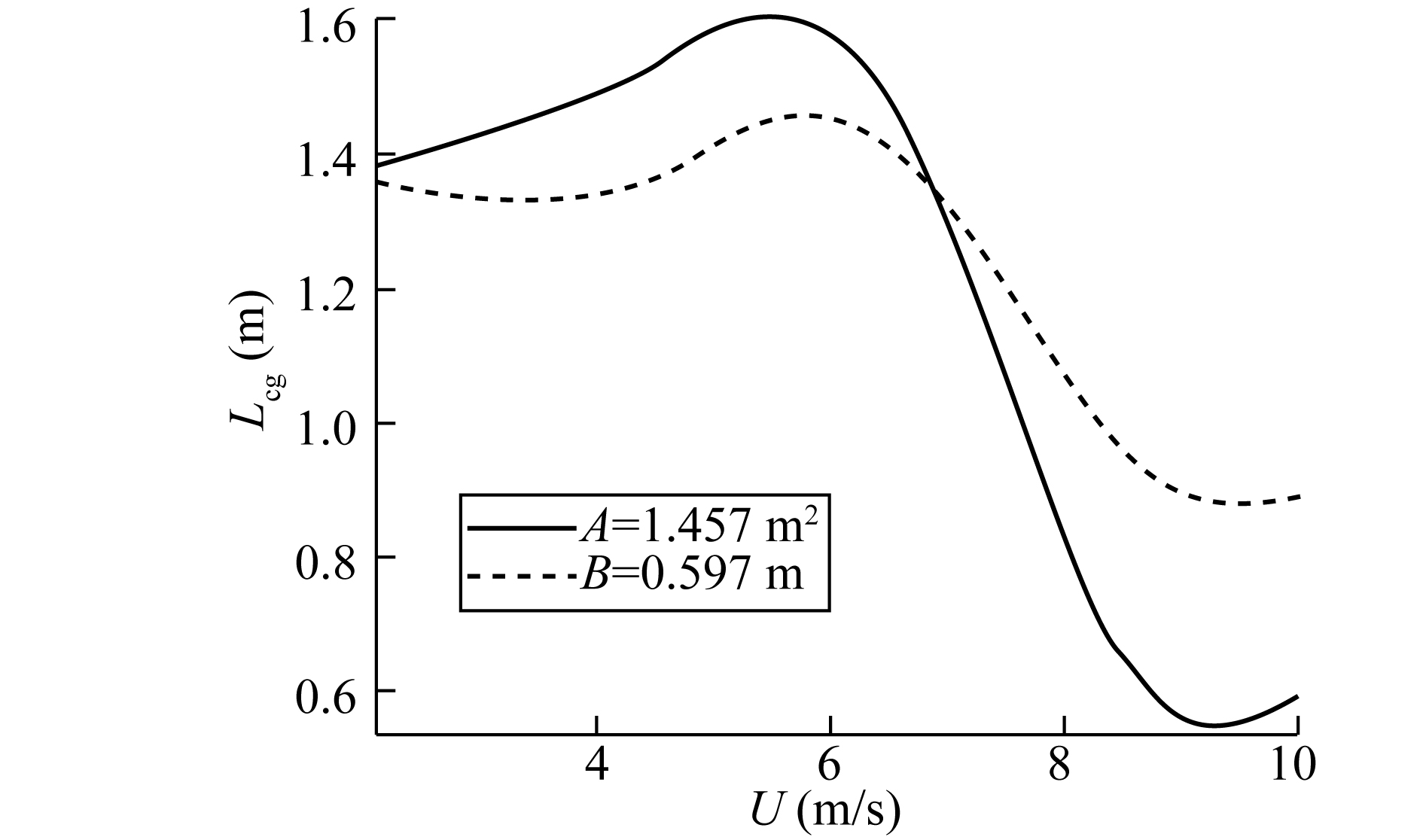
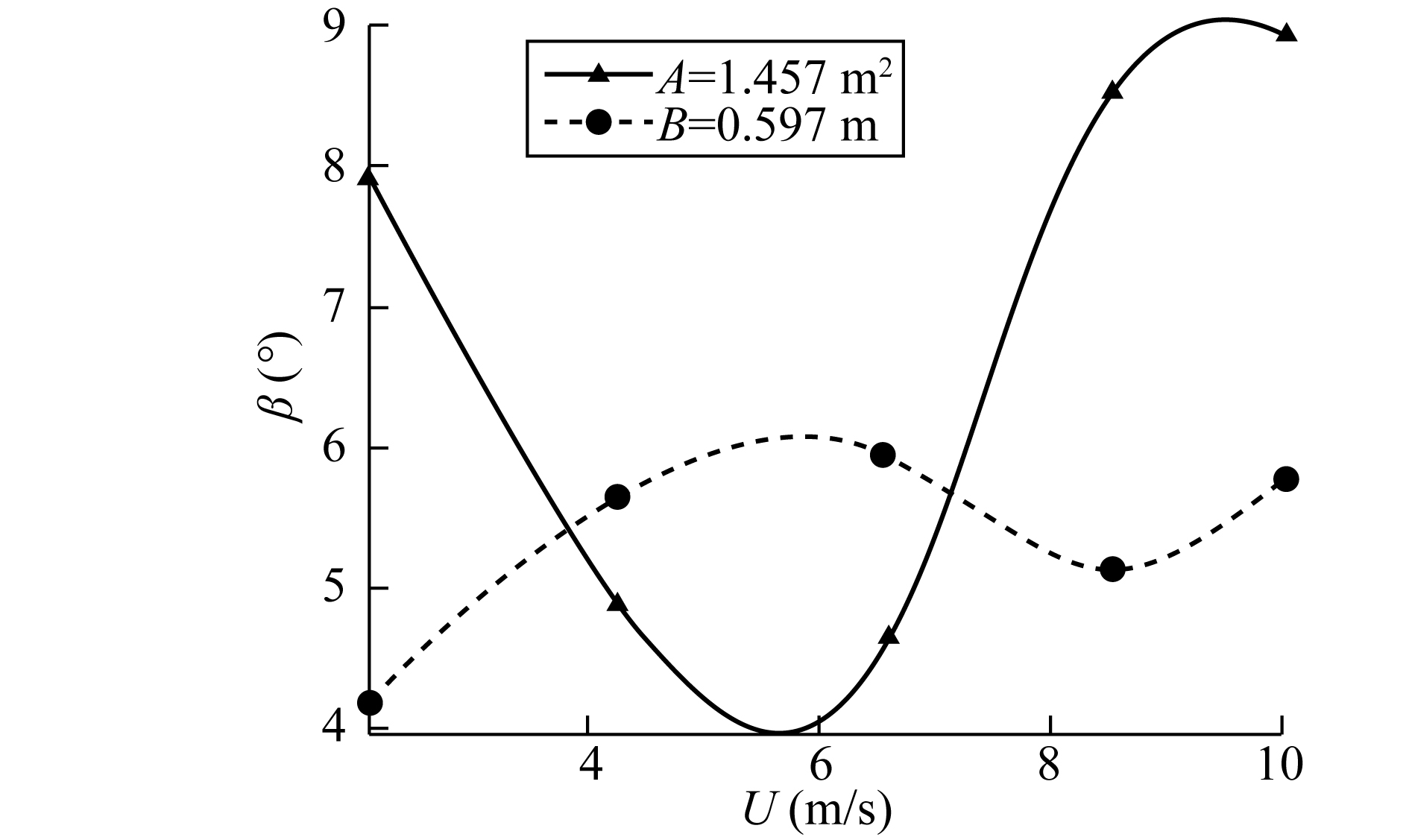
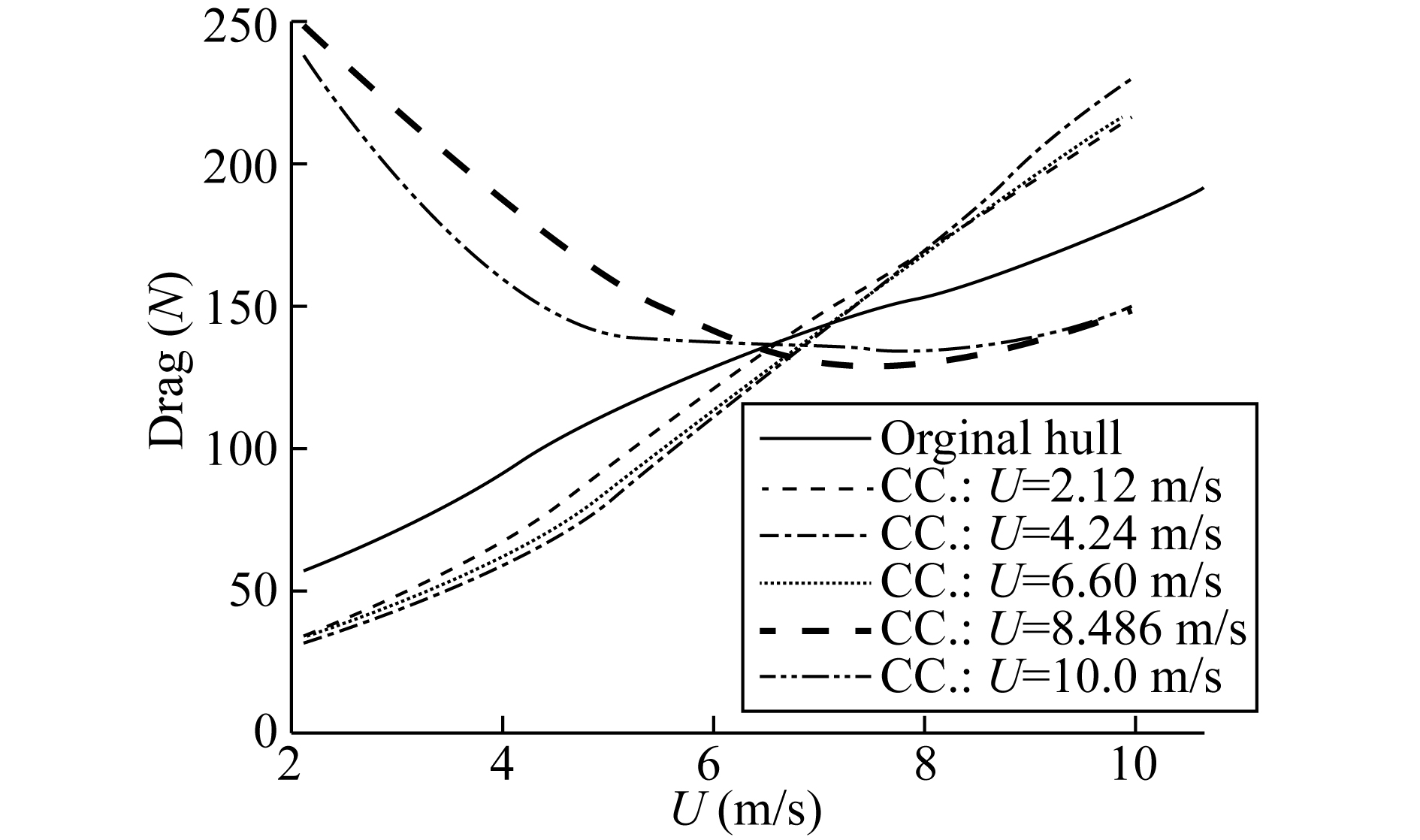
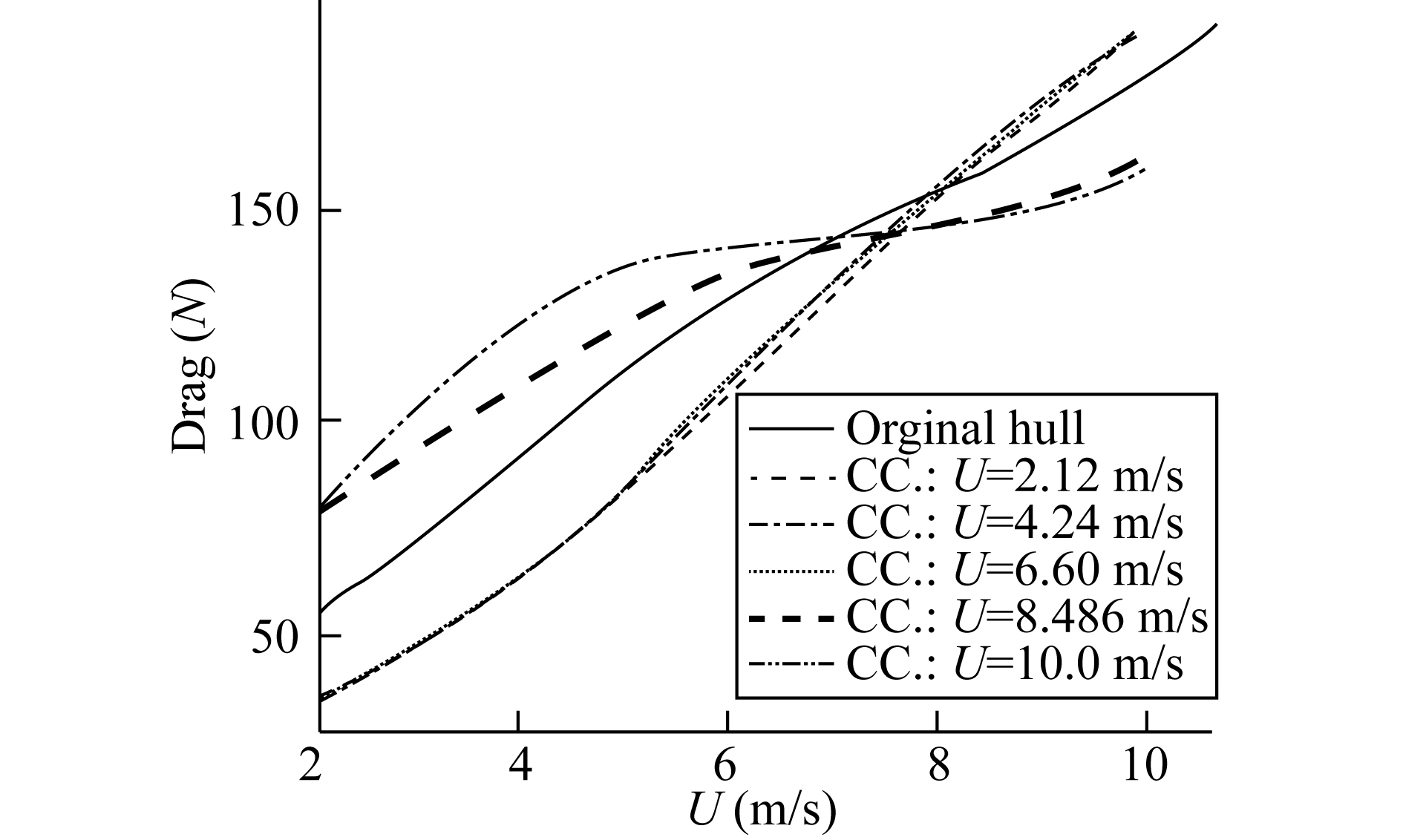
One of the important phases of designing a craft is stability analysis and optimization of the drag force in cruise speed. In this research the longitudinal and lateral stability of a planing hull craft (DTMB 62 model 4667-1) is investigated with some semi-empirical formulae and the effects of some important design parameters are investigated on the limit of stability region. Also on the basis of these empirical formulations and by using a genetic algorithm the drag force is optimized in each constant cruise speed with the stability criteria limits at a constant beam or projected area. Aspect ratio, the longitudinal position of the gravity center and deadrise angle are the optimization parameters. The results show that the aspect ratio and the longitudinal position of the gravity center are two important parameters in optimizing the drag force and for this planing vessel the drag force can be reduced by 22%.
One of the important phases of designing a craft is stability analysis and optimization of the drag force in cruise speed. In this research the longitudinal and lateral stability of a planing hull craft (DTMB 62 model 4667-1) is investigated with some semi-empirical formulae and the effects of some important design parameters are investigated on the limit of stability region. Also on the basis of these empirical formulations and by using a genetic algorithm the drag force is optimized in each constant cruise speed with the stability criteria limits at a constant beam or projected area. Aspect ratio, the longitudinal position of the gravity center and deadrise angle are the optimization parameters. The results show that the aspect ratio and the longitudinal position of the gravity center are two important parameters in optimizing the drag force and for this planing vessel the drag force can be reduced by 22%.

2019, 33(3): 373-383.
doi: 10.1007/s13344-019-0036-2
Abstract:
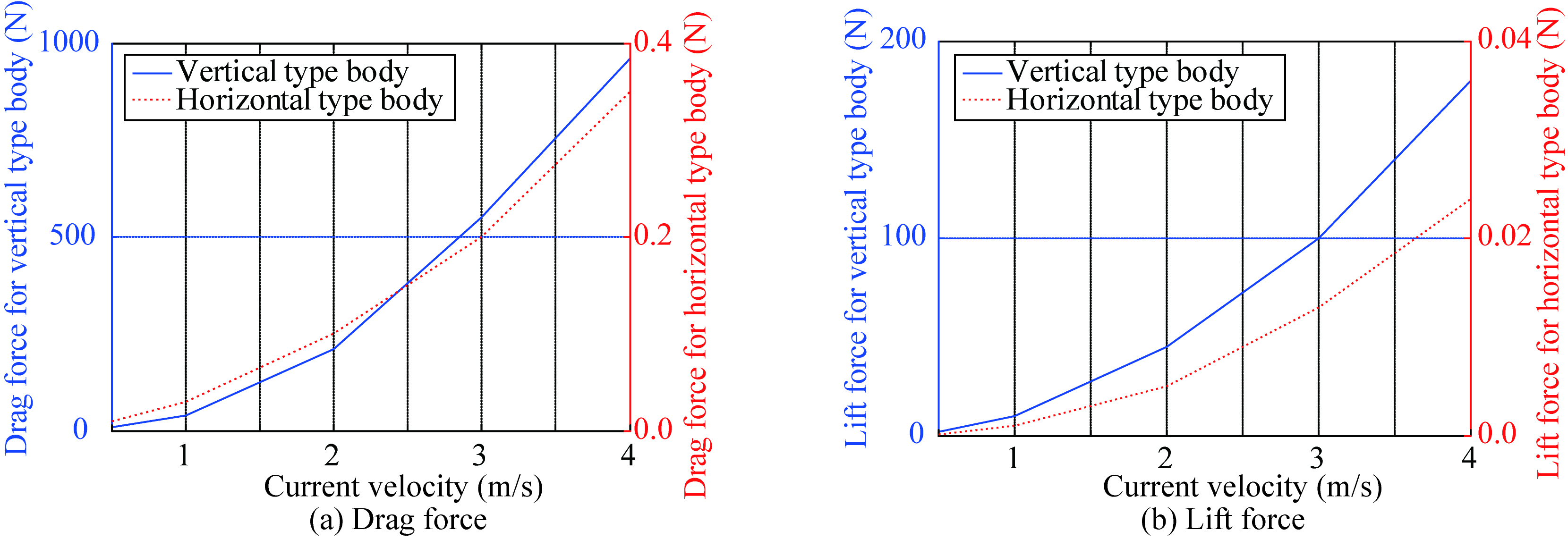
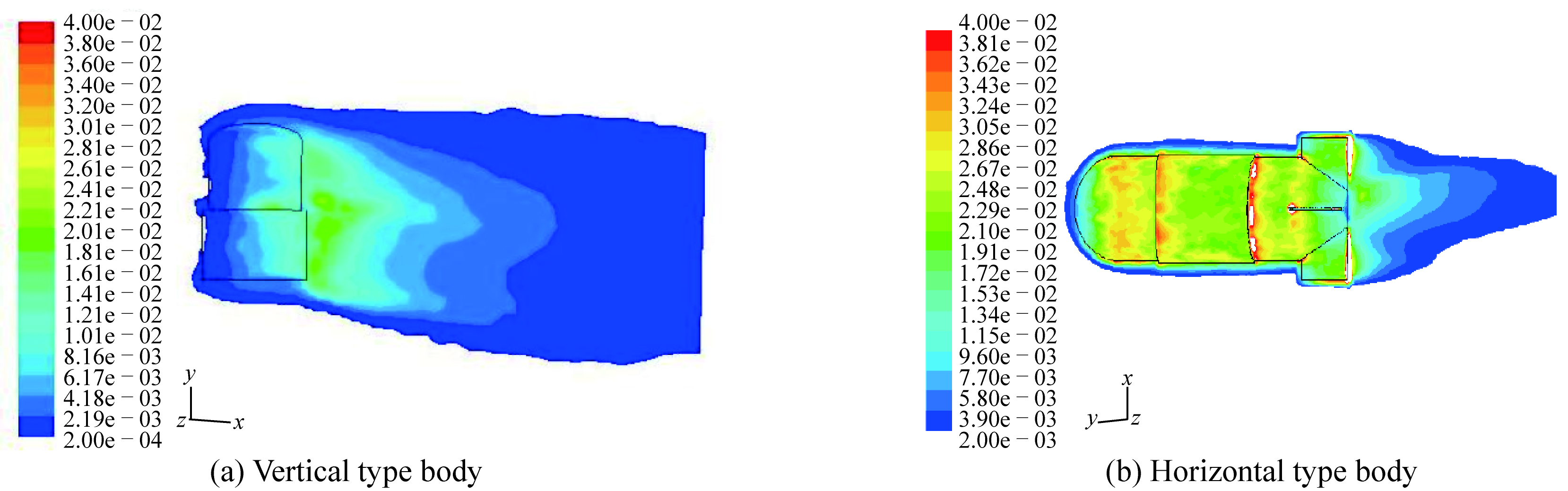
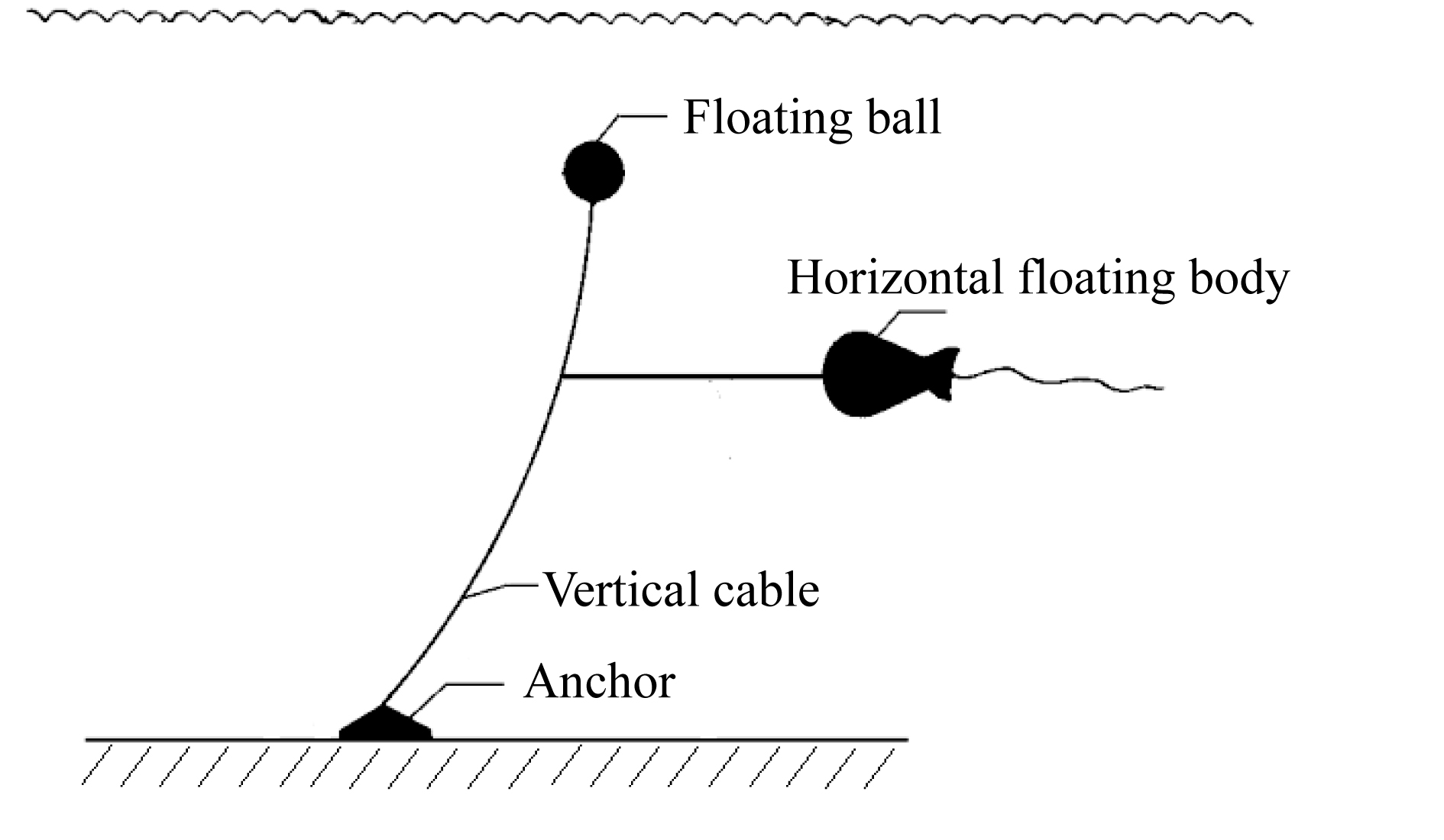
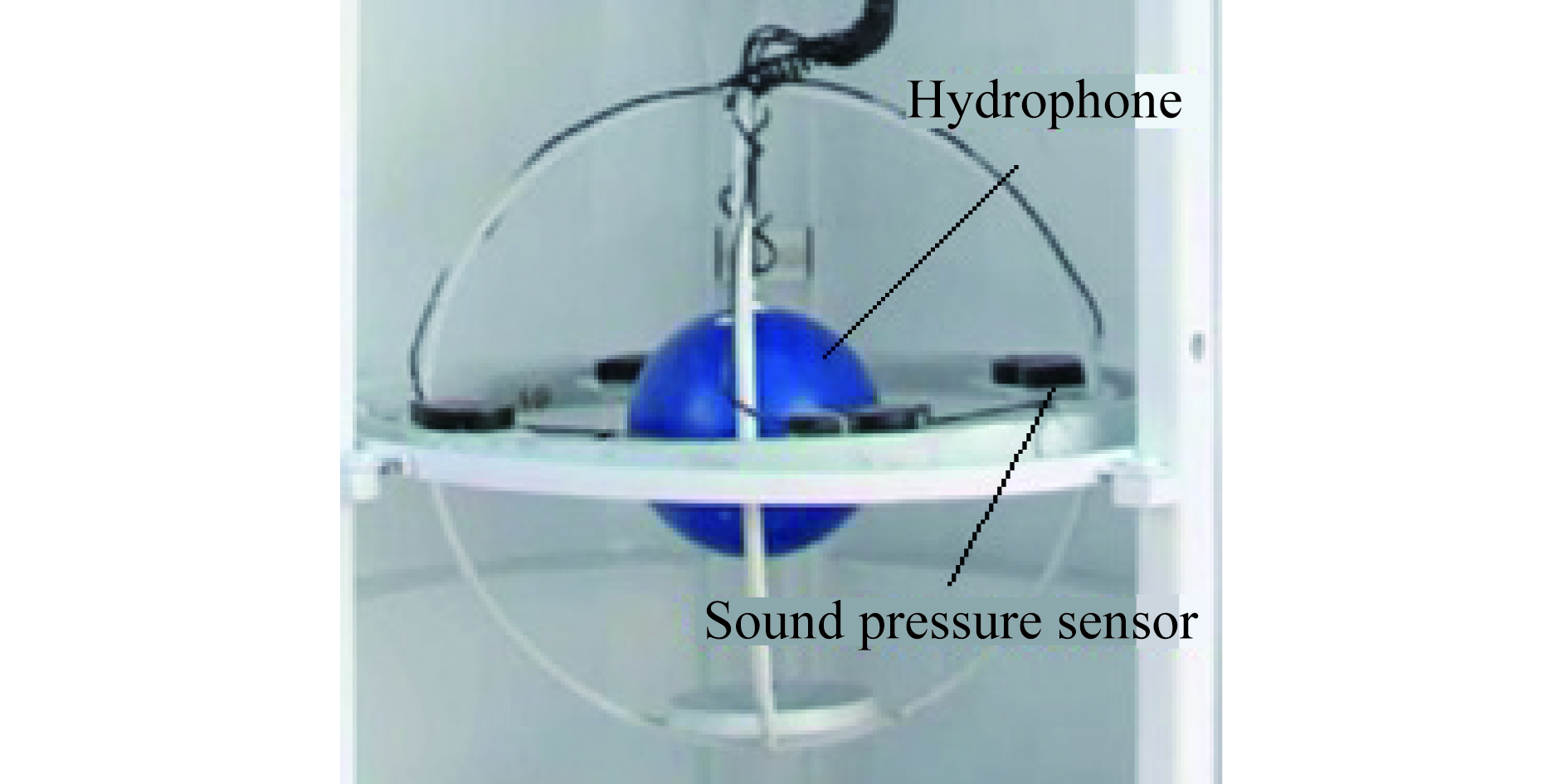
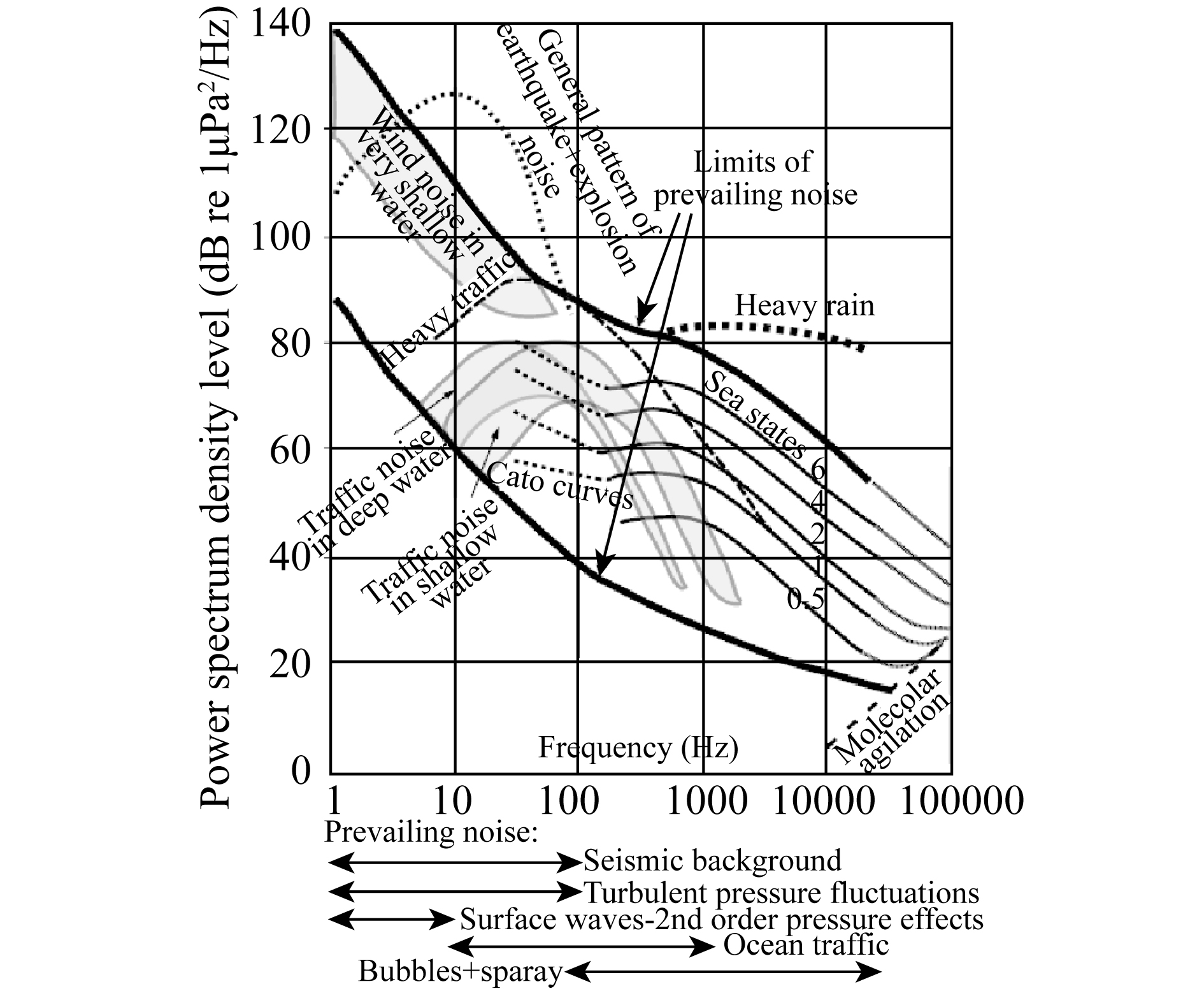
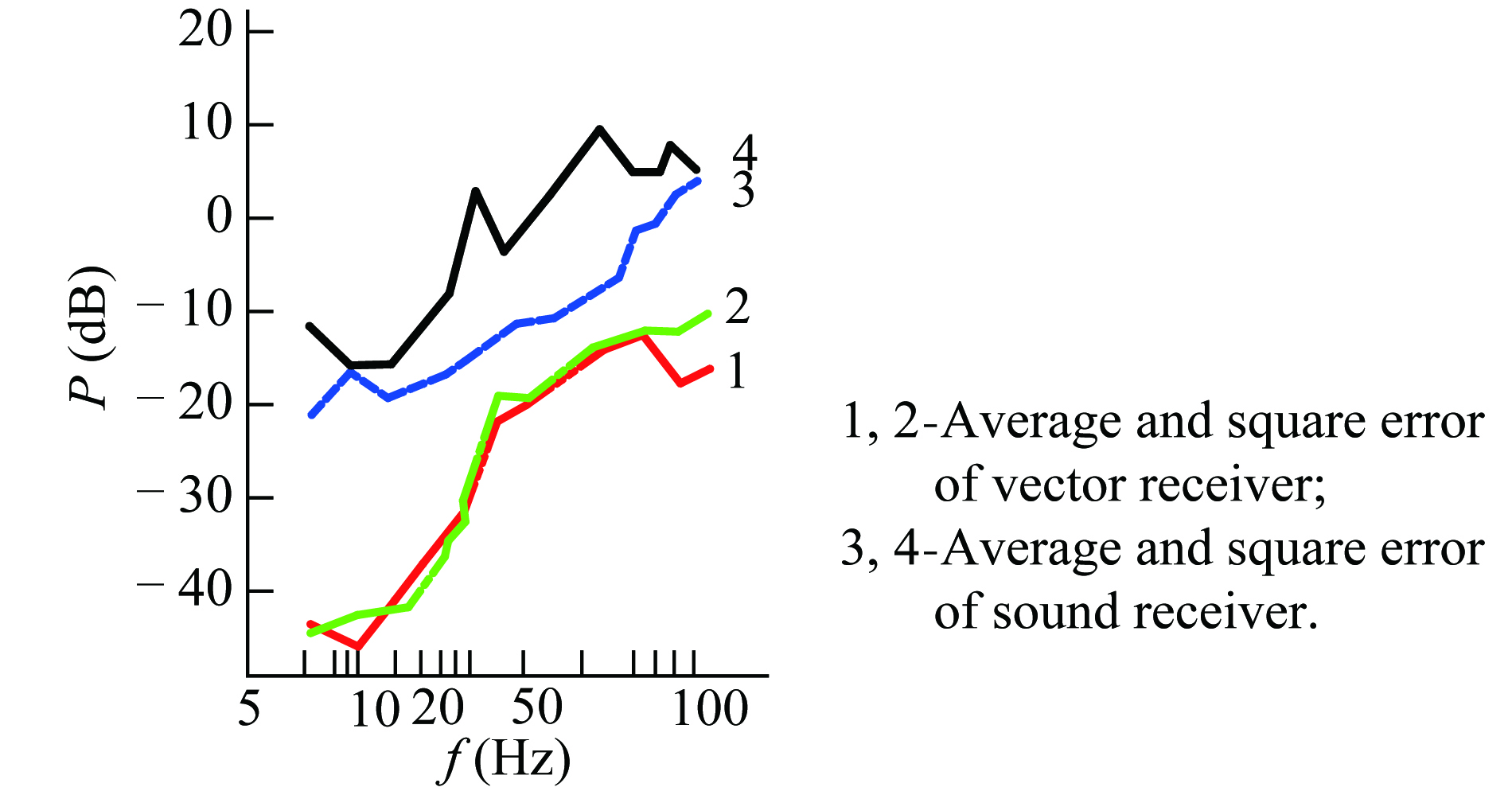
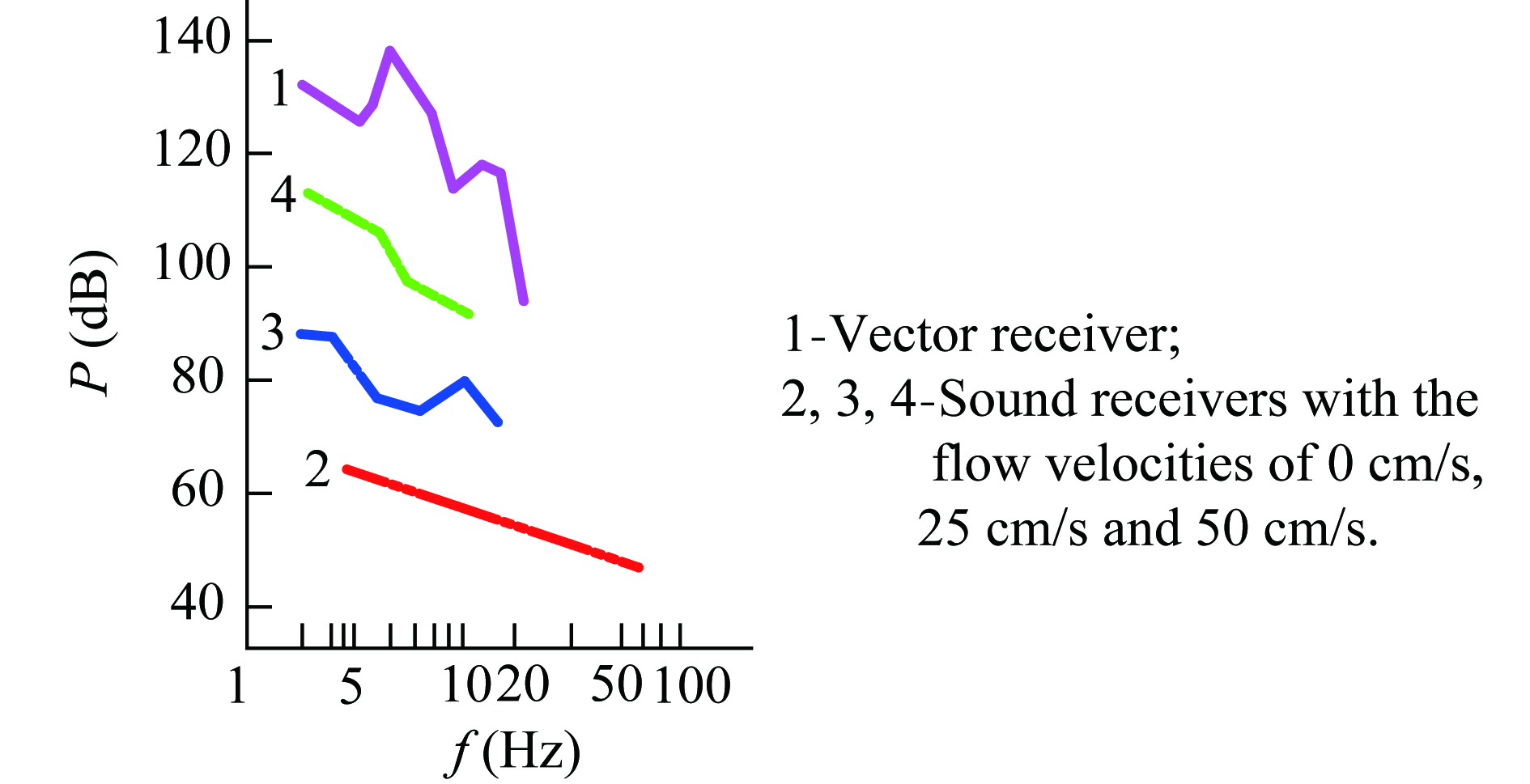
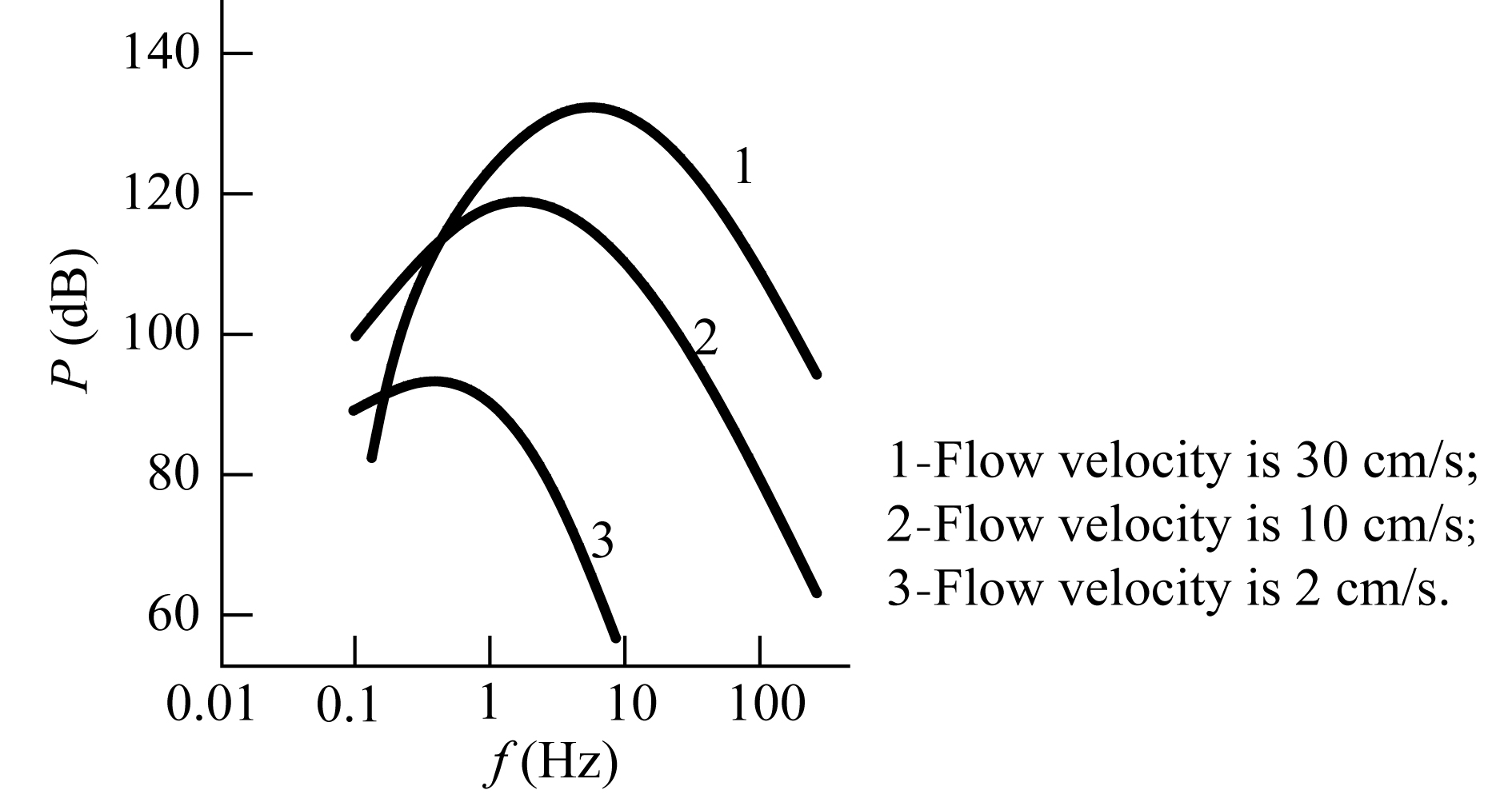
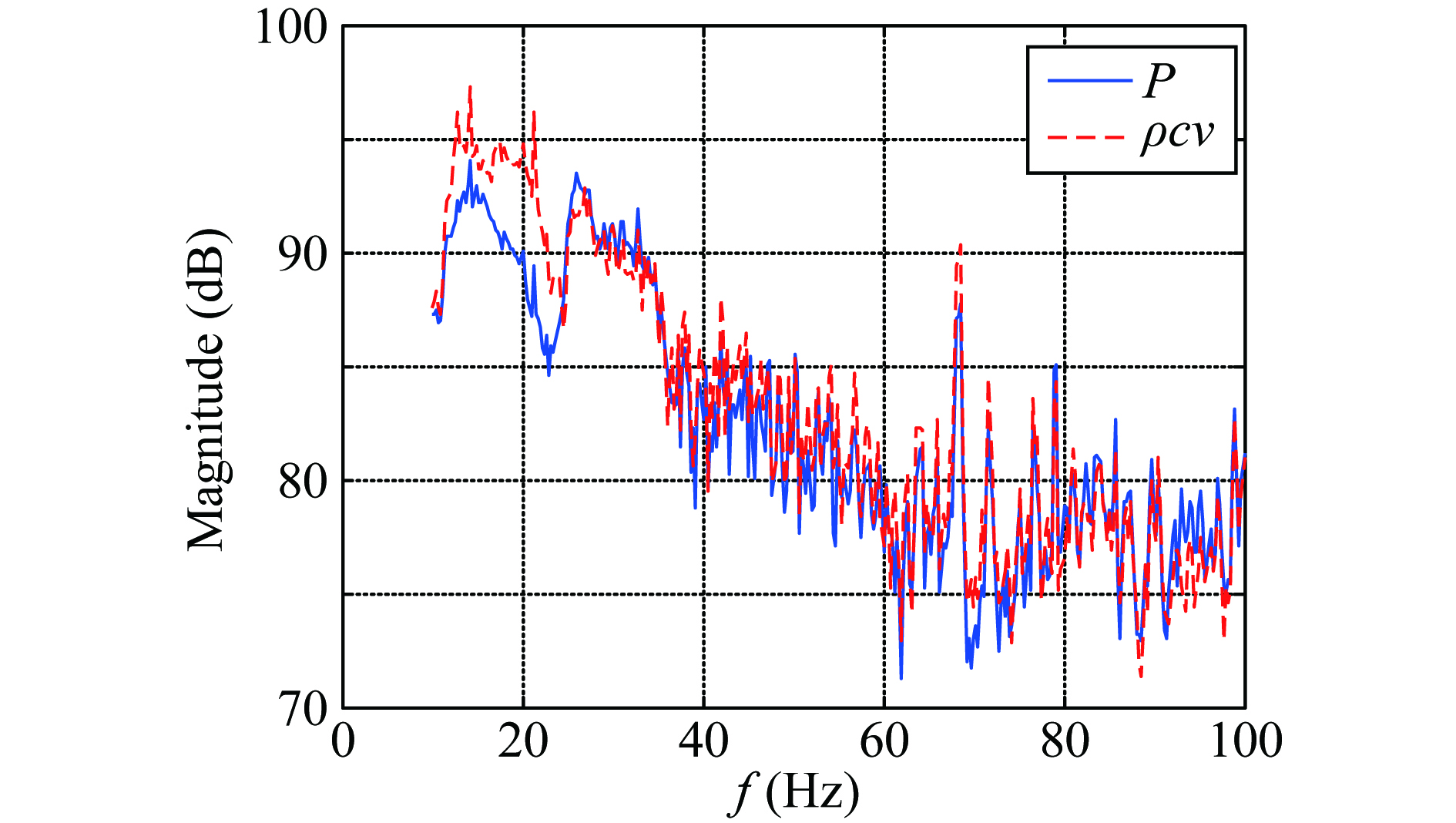
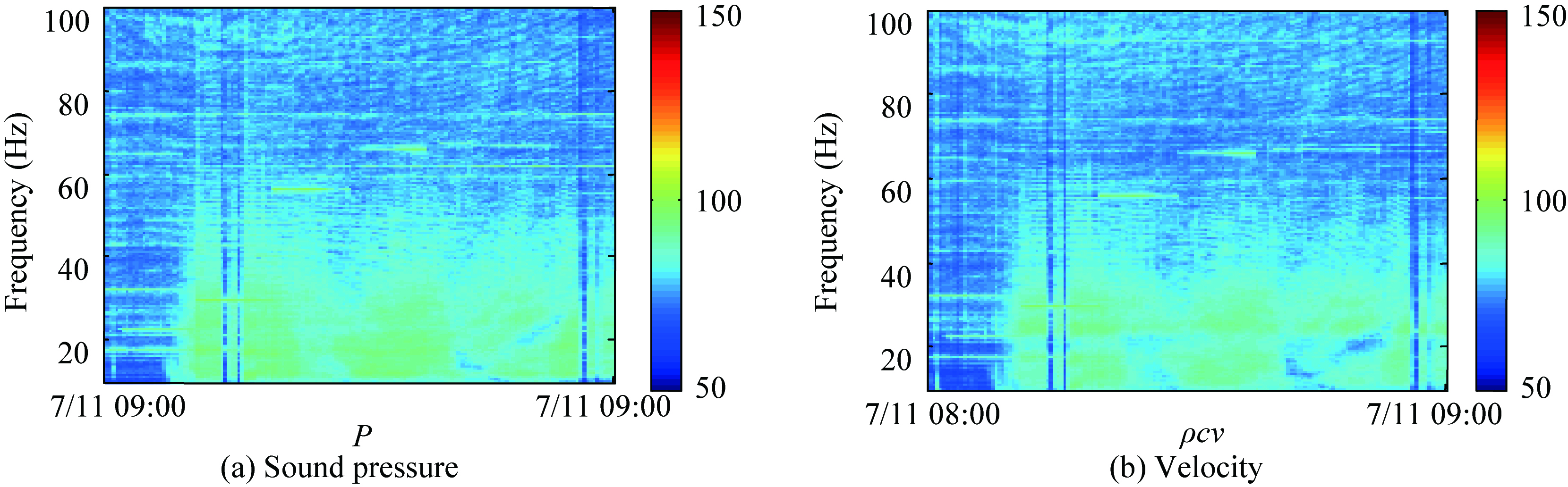
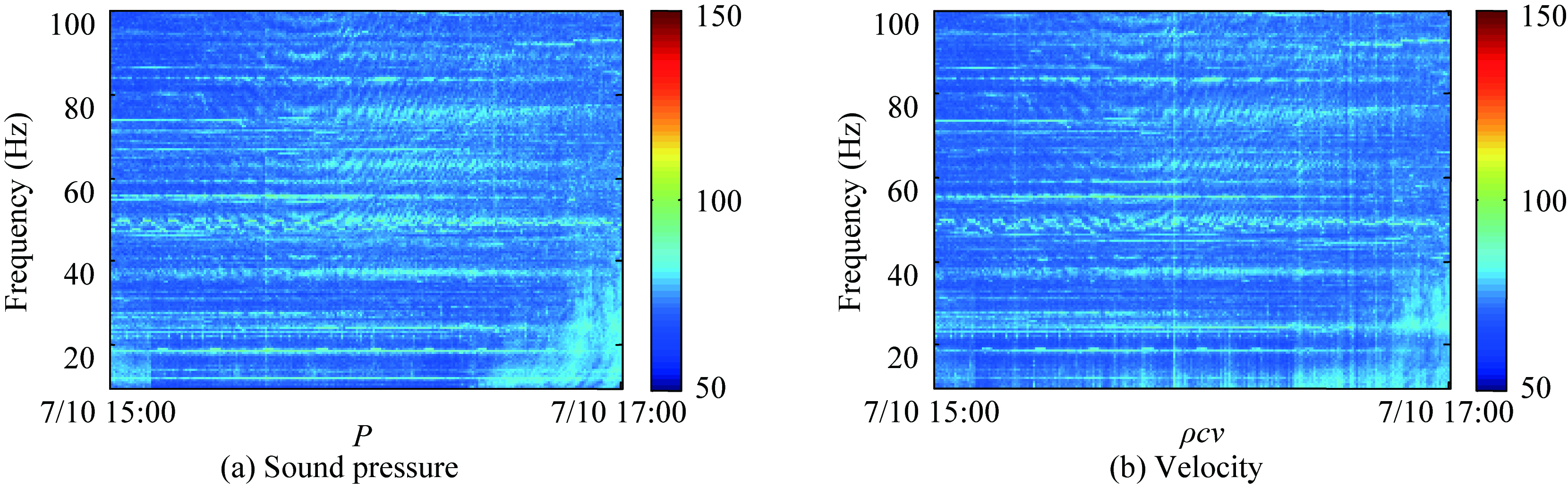
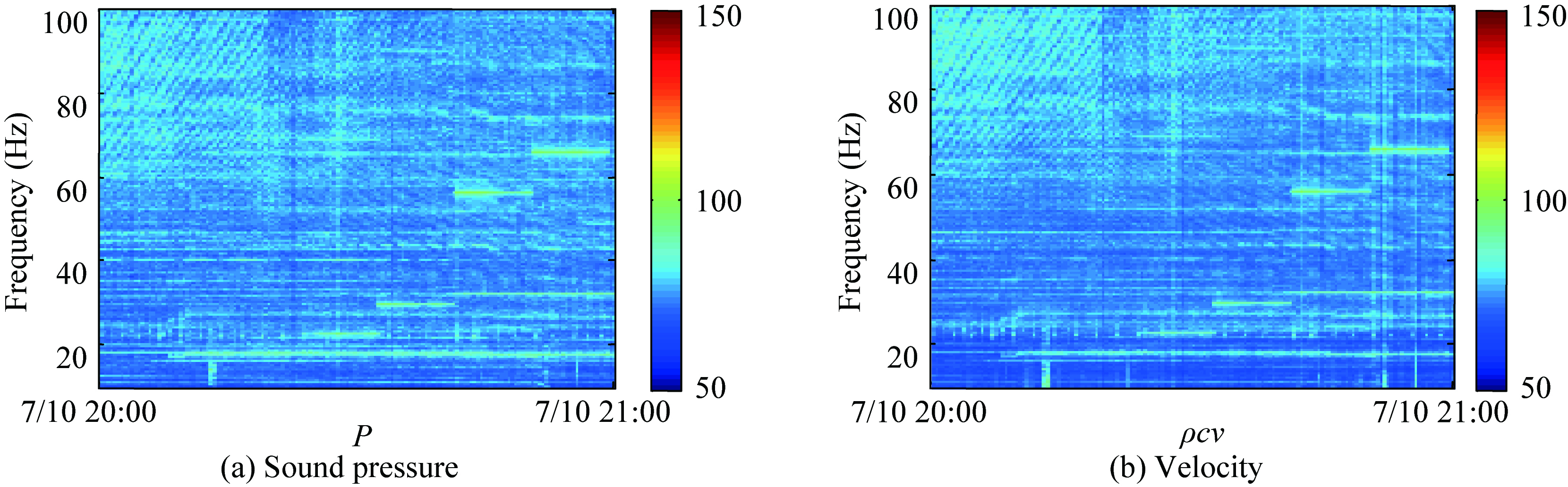
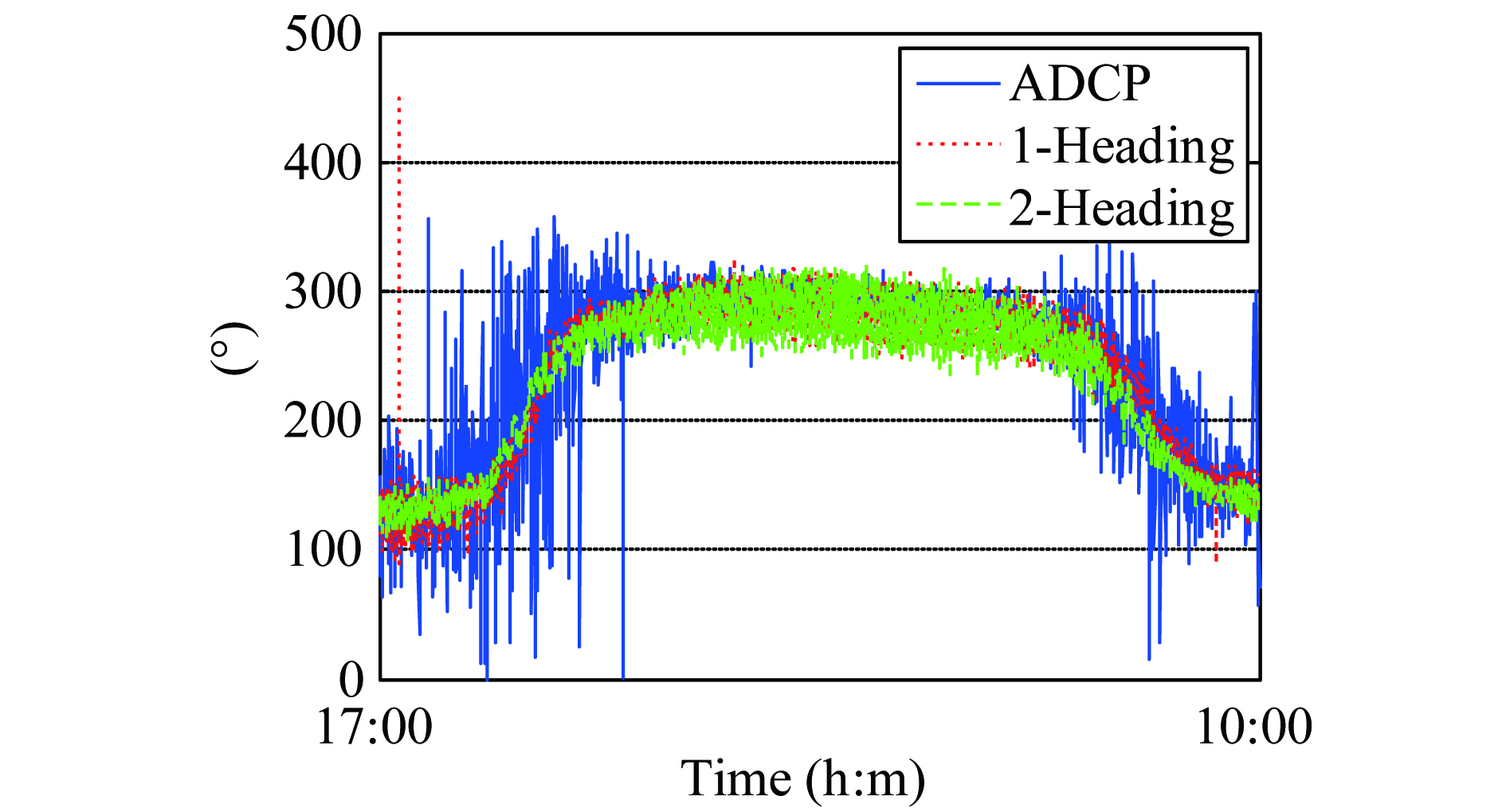
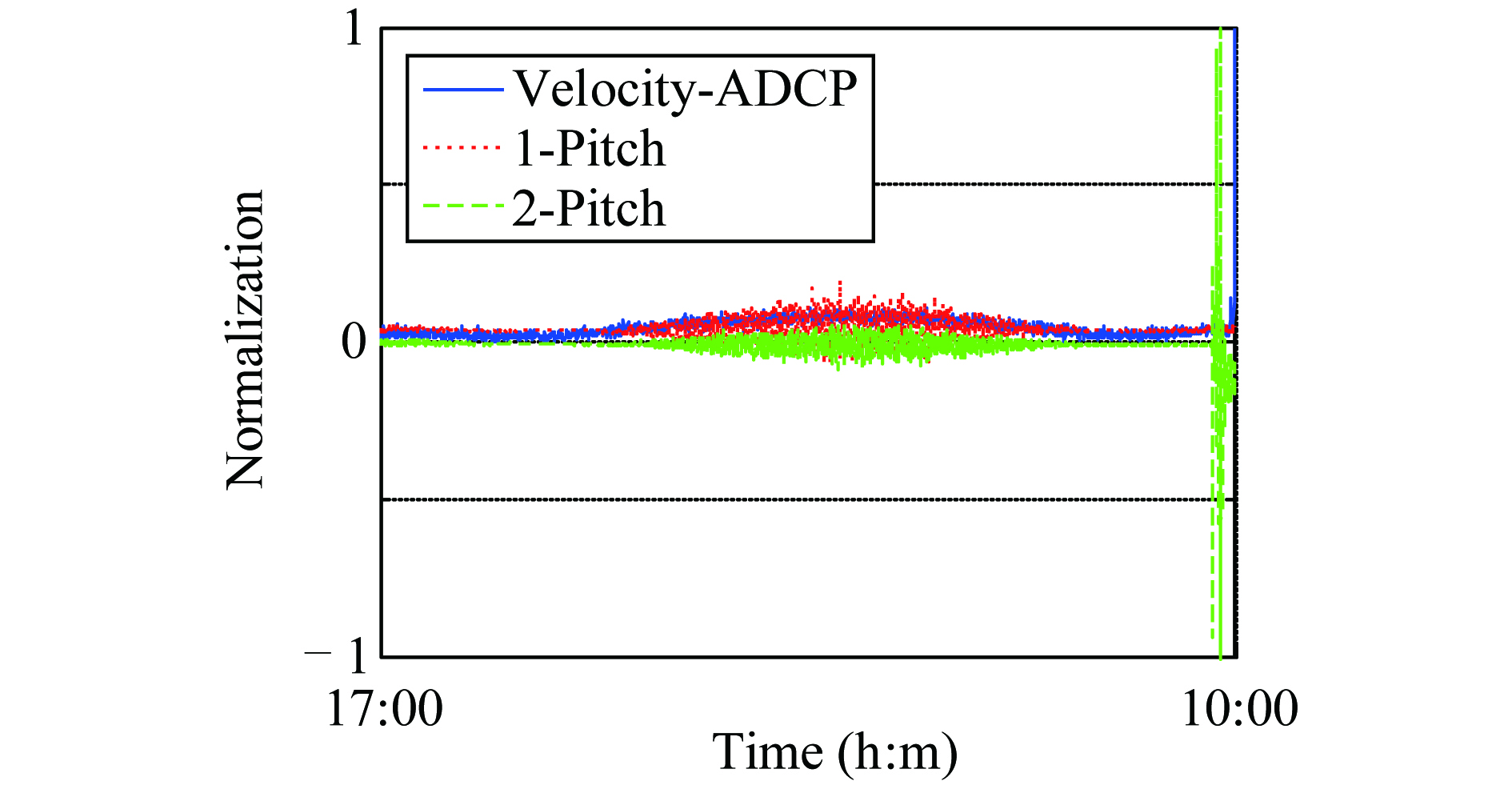
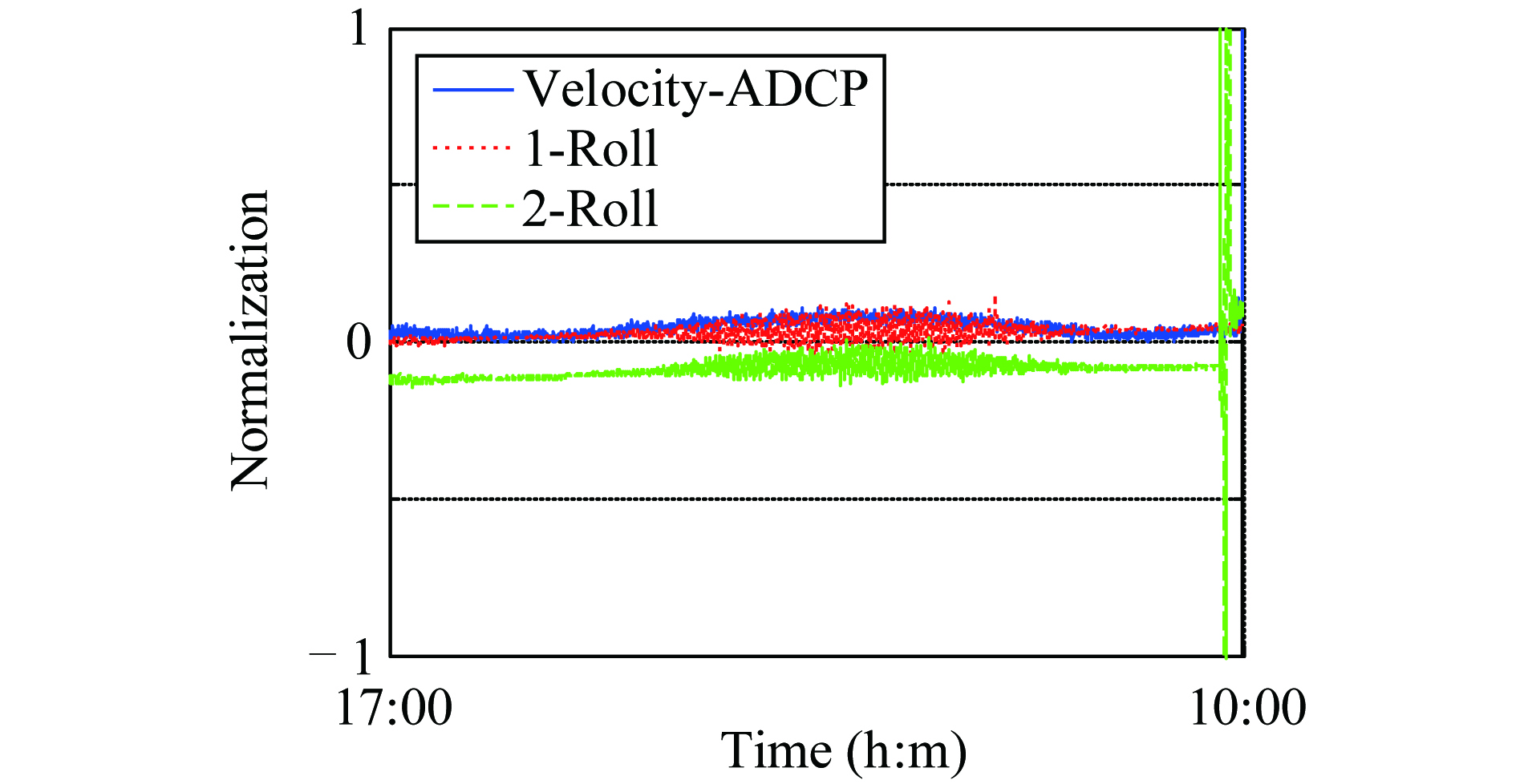
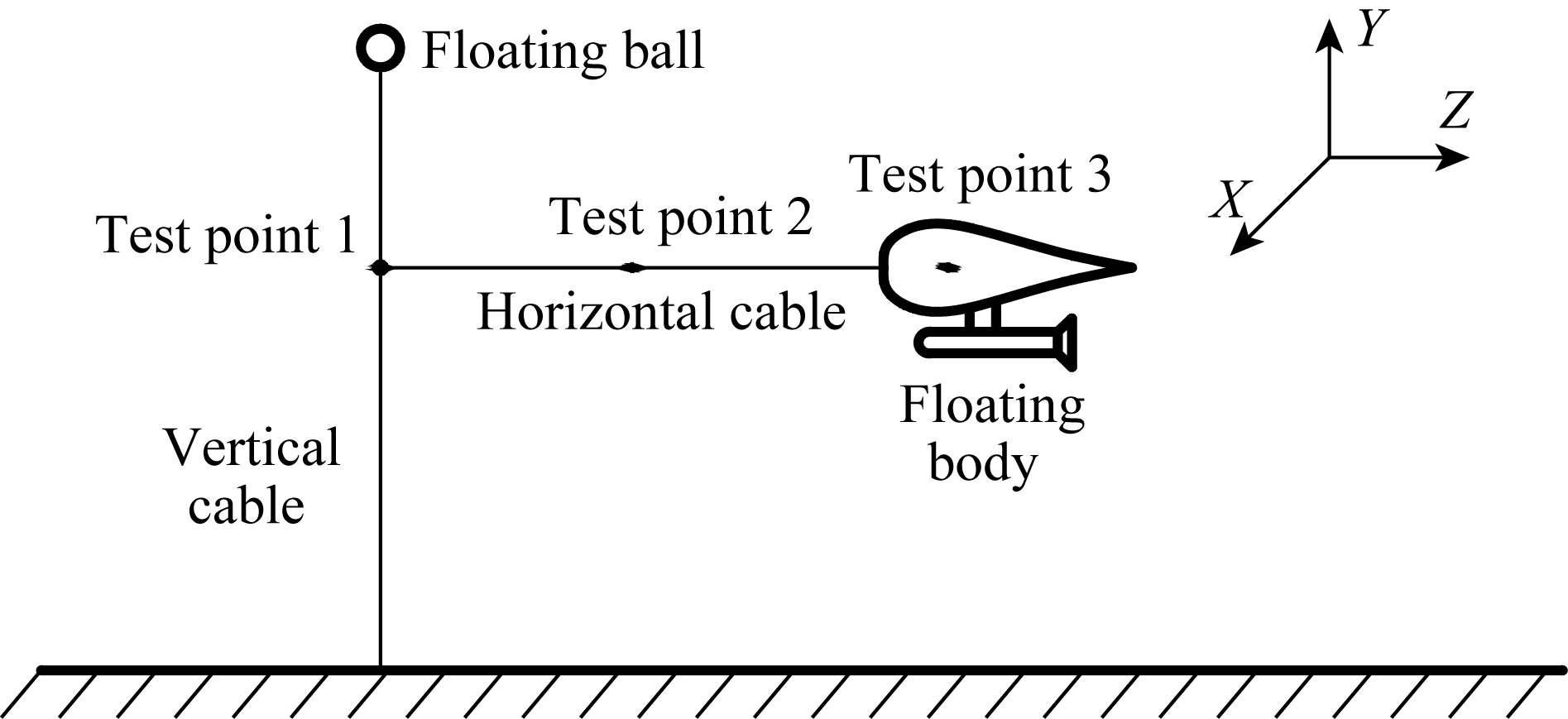
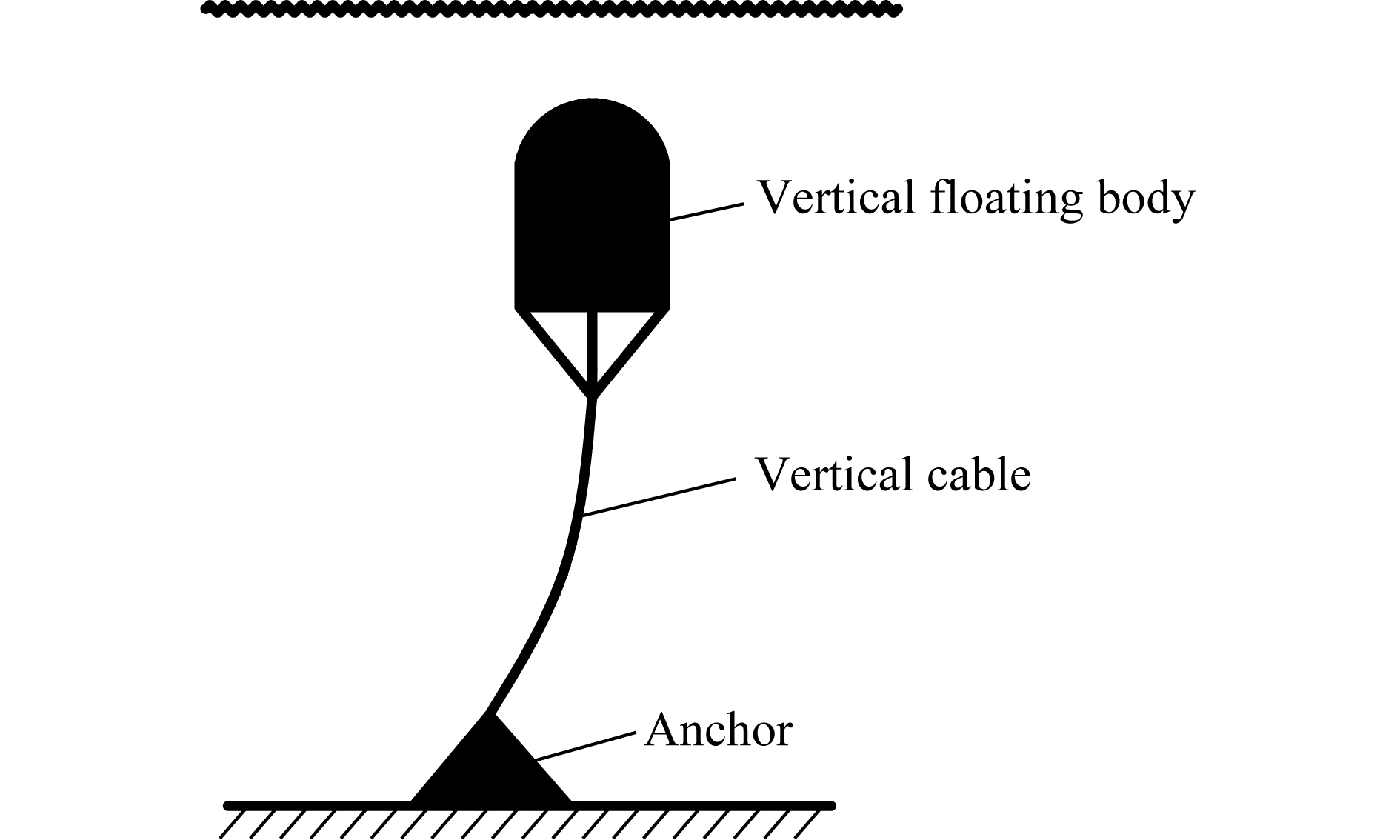
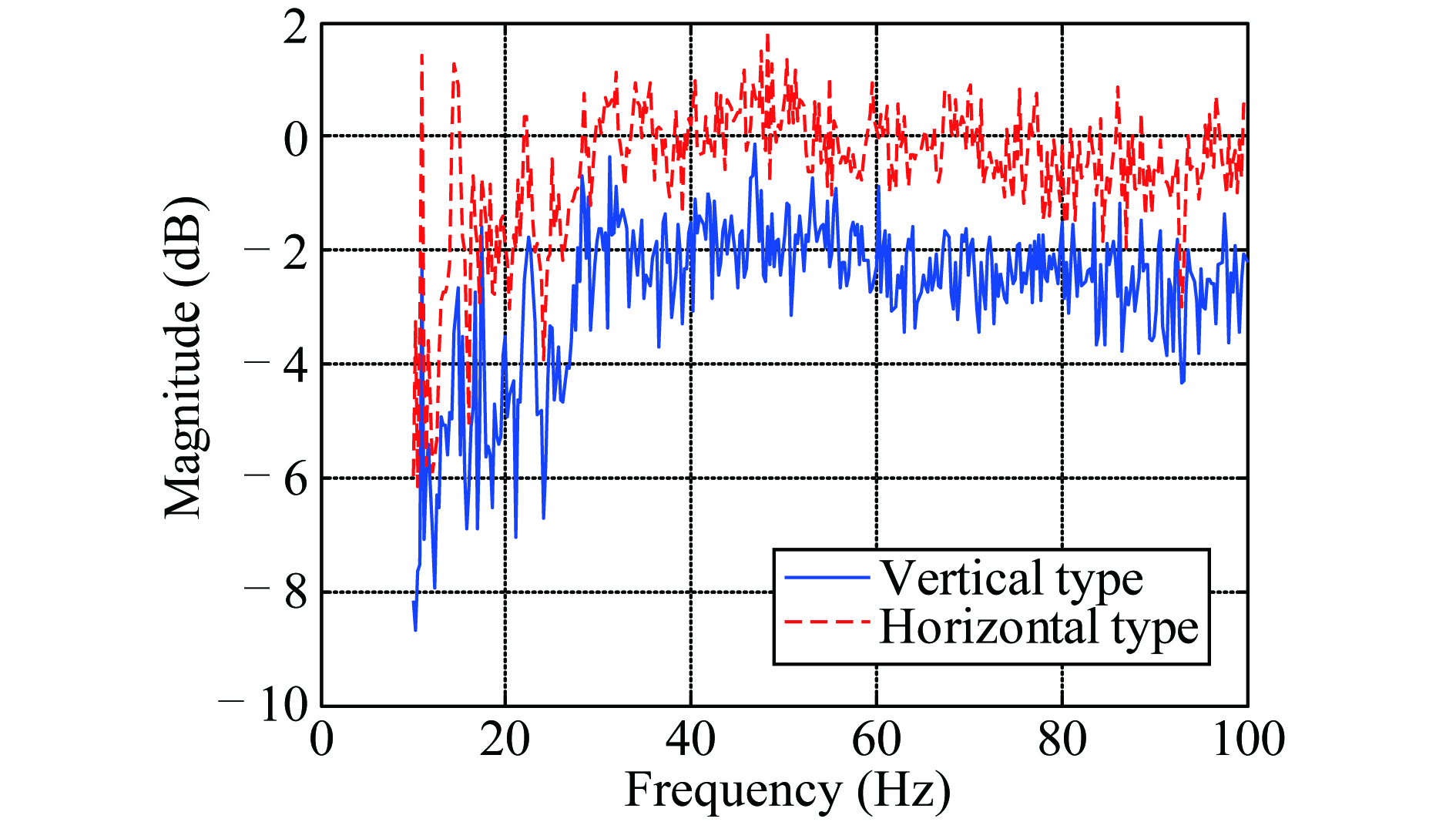
Ocean vector acoustic measurement is feasible affected by the hydrodynamic interference caused by the flow fluctuations and structural vibrations, especially in the very-low-frequency monitoring. Hence, a novel horizontal floating platform including a horizontal floating cable, vertical mooring cable and floating main body is proposed and described in this paper. It has the advantages of good maneuverability along with the current and multi-stage vibration isolation. The main application of this platform is to measure the ocean ambient noise coming from the wave fluctuation and the deterministic acoustic signals such as aquatic organisms, underwater targets and sailing vehicles. The influence of the current fluctuation on the attitude angle and flow induced vibration of cables and main body are analyzed with some previous sea test data. Moreover, the comparison between the vertical type platform used before and the horizontal type platform is also discussed. It is concluded that there is obvious relevance between the attitude angle and ocean current variation. Meanwhile, the abnormal influence on the main body is caused by the vibration transmission from the fluctuation of cables. There will be the influence on the accuracy of the acoustic measurement above 100 Hz, and the inherent vibration characteristic of the main body is the primary reason.
Ocean vector acoustic measurement is feasible affected by the hydrodynamic interference caused by the flow fluctuations and structural vibrations, especially in the very-low-frequency monitoring. Hence, a novel horizontal floating platform including a horizontal floating cable, vertical mooring cable and floating main body is proposed and described in this paper. It has the advantages of good maneuverability along with the current and multi-stage vibration isolation. The main application of this platform is to measure the ocean ambient noise coming from the wave fluctuation and the deterministic acoustic signals such as aquatic organisms, underwater targets and sailing vehicles. The influence of the current fluctuation on the attitude angle and flow induced vibration of cables and main body are analyzed with some previous sea test data. Moreover, the comparison between the vertical type platform used before and the horizontal type platform is also discussed. It is concluded that there is obvious relevance between the attitude angle and ocean current variation. Meanwhile, the abnormal influence on the main body is caused by the vibration transmission from the fluctuation of cables. There will be the influence on the accuracy of the acoustic measurement above 100 Hz, and the inherent vibration characteristic of the main body is the primary reason.




ScholarOne Manuscripts Log In
Current Issue
- Volume 40
- Issue 1
- February 2026
- Editor-in-Chief:
- Superintended by:
CHINA ASSOCIATION FOR SCIENCE AND TECHNOLOGY
- Sponsored by:
Chinese Ocean Engineering Society (COES)
- Edited by:
Nanjing Hydraulic Research Institute
Highlights
Stay up to Date
 Article abstracts by RSS
Article abstracts by RSS E-mail Alerts
E-mail Alerts