





Browse Articles
Display Method:
Display Method:
|
2025, 39(5): 793 -805
doi: 10.1007/s13344-025-0062-1
[Abstract](0)
Abstract:
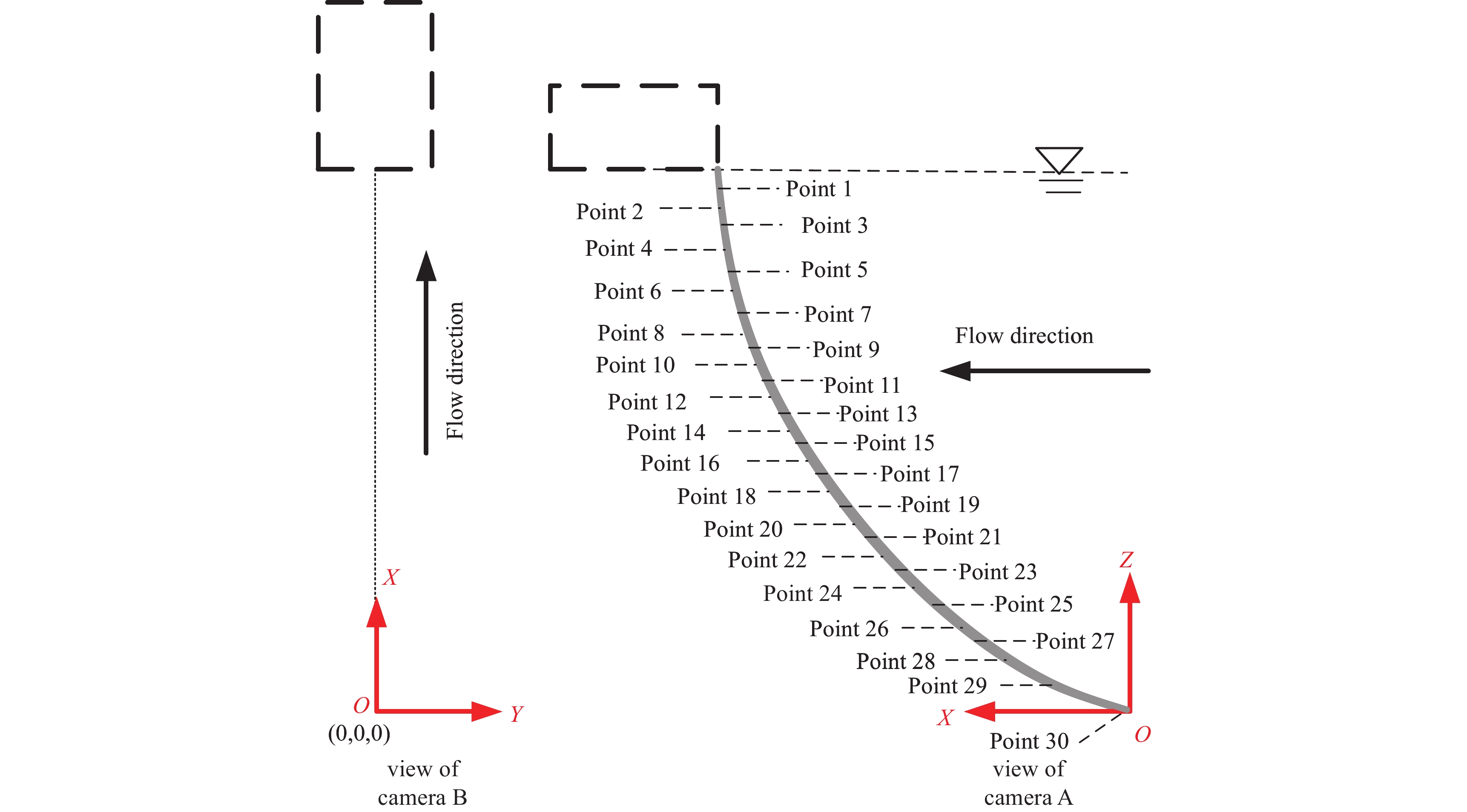
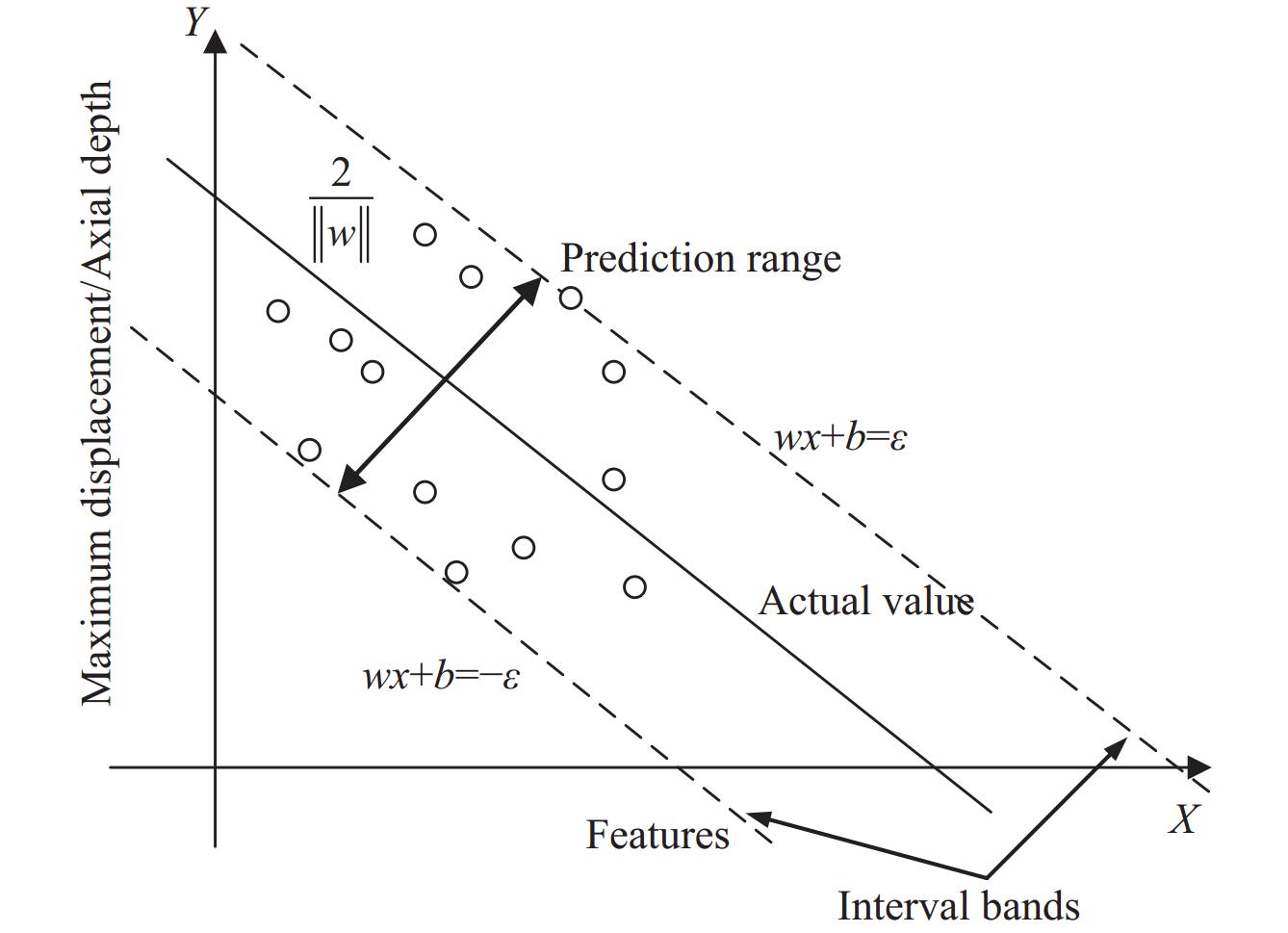
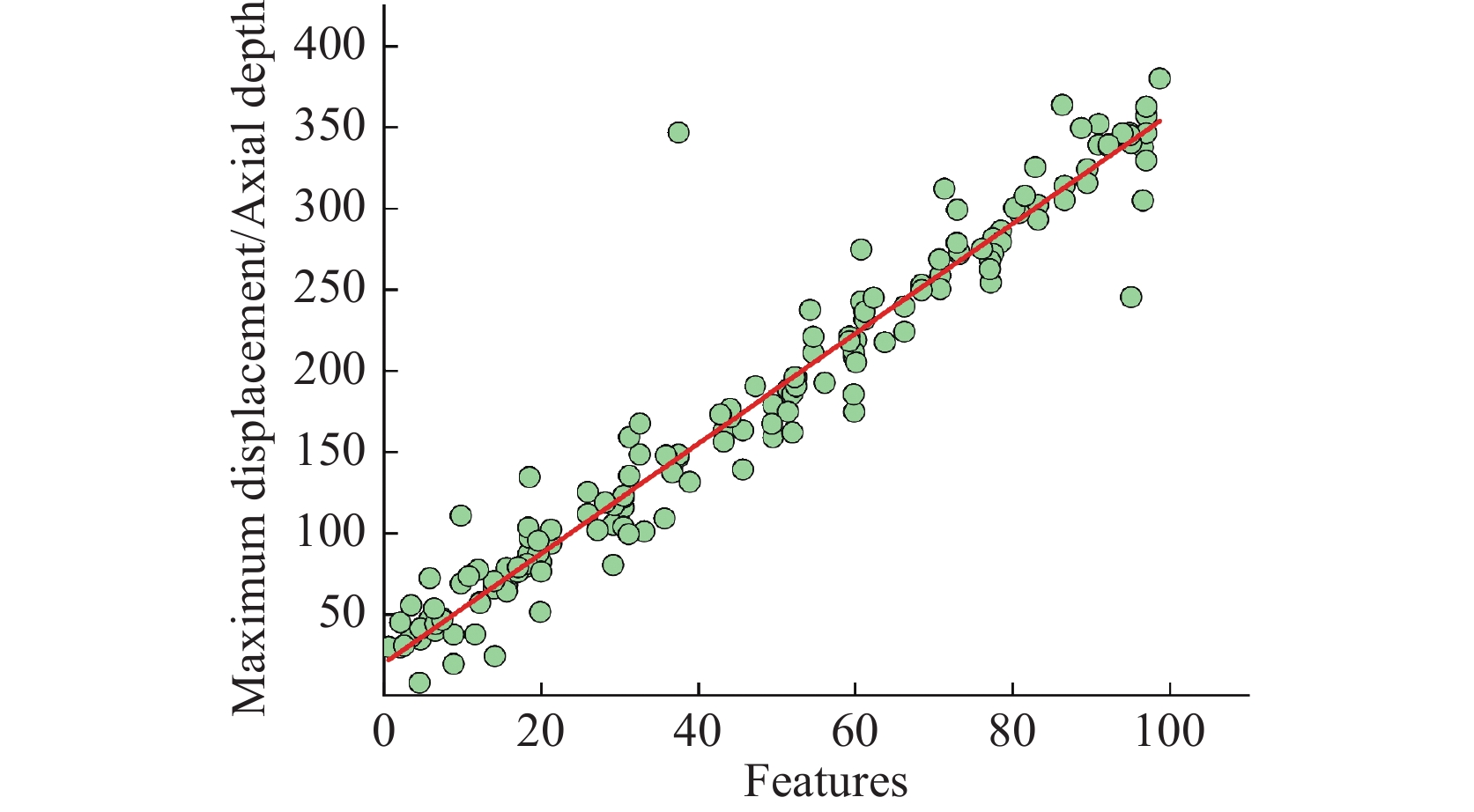
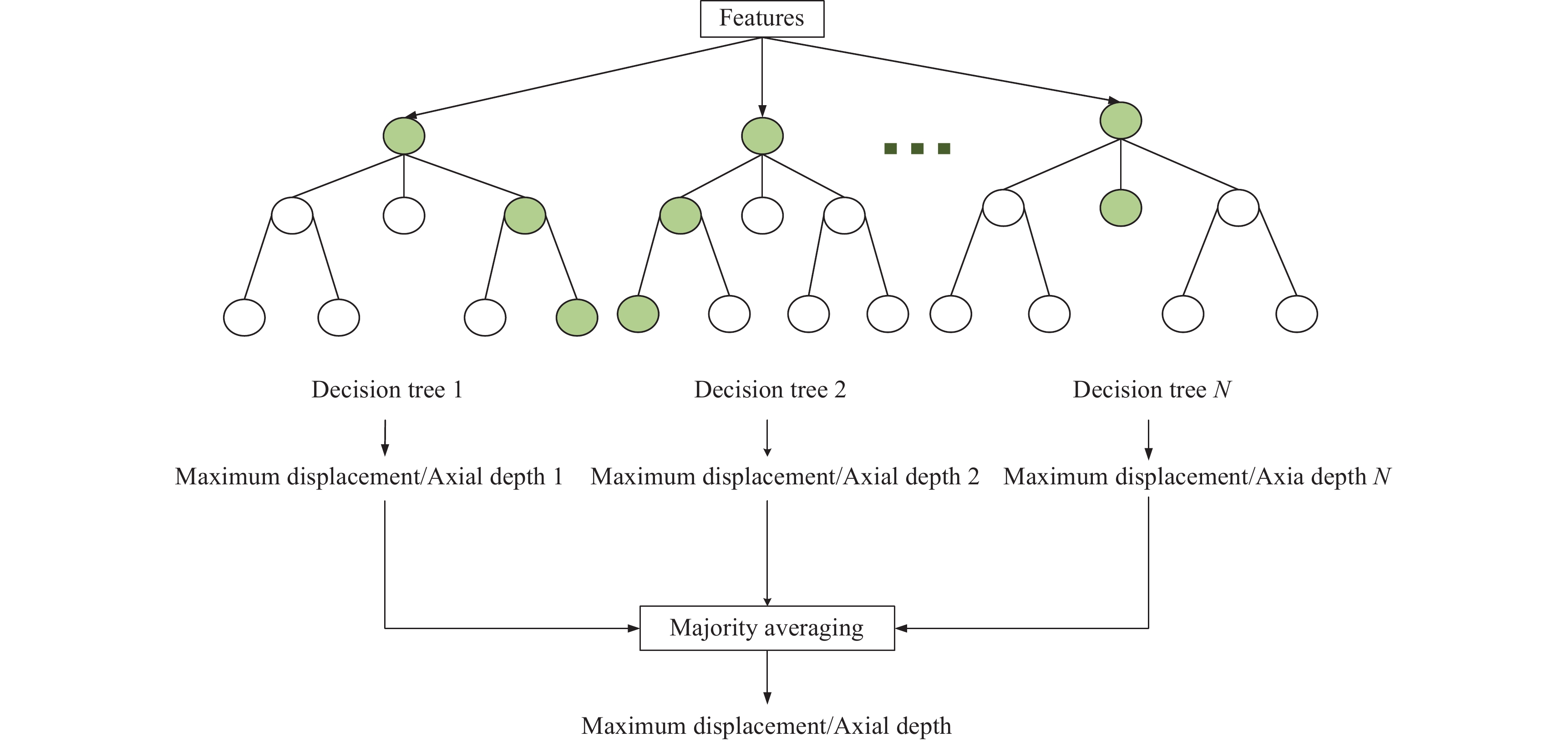
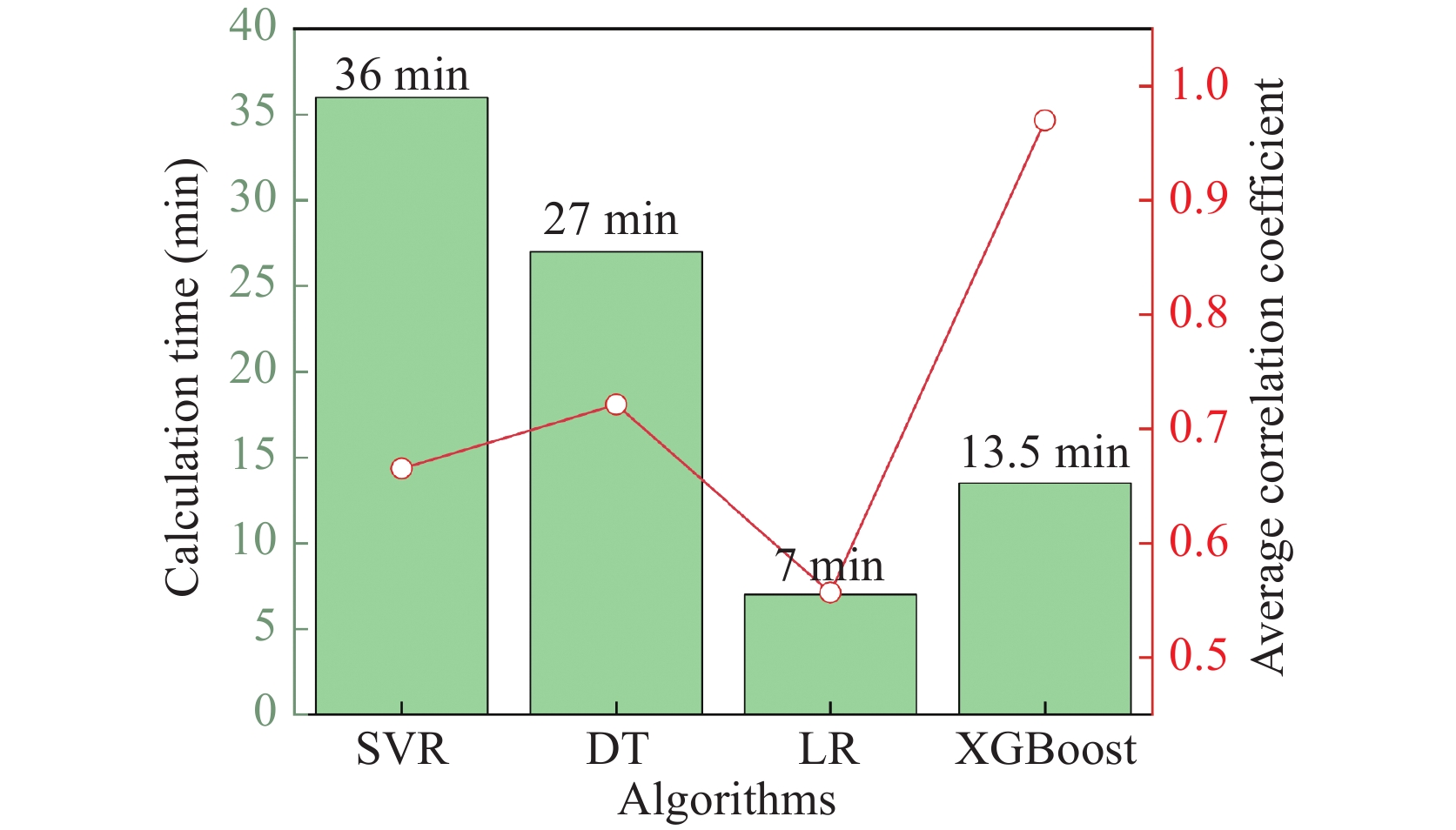
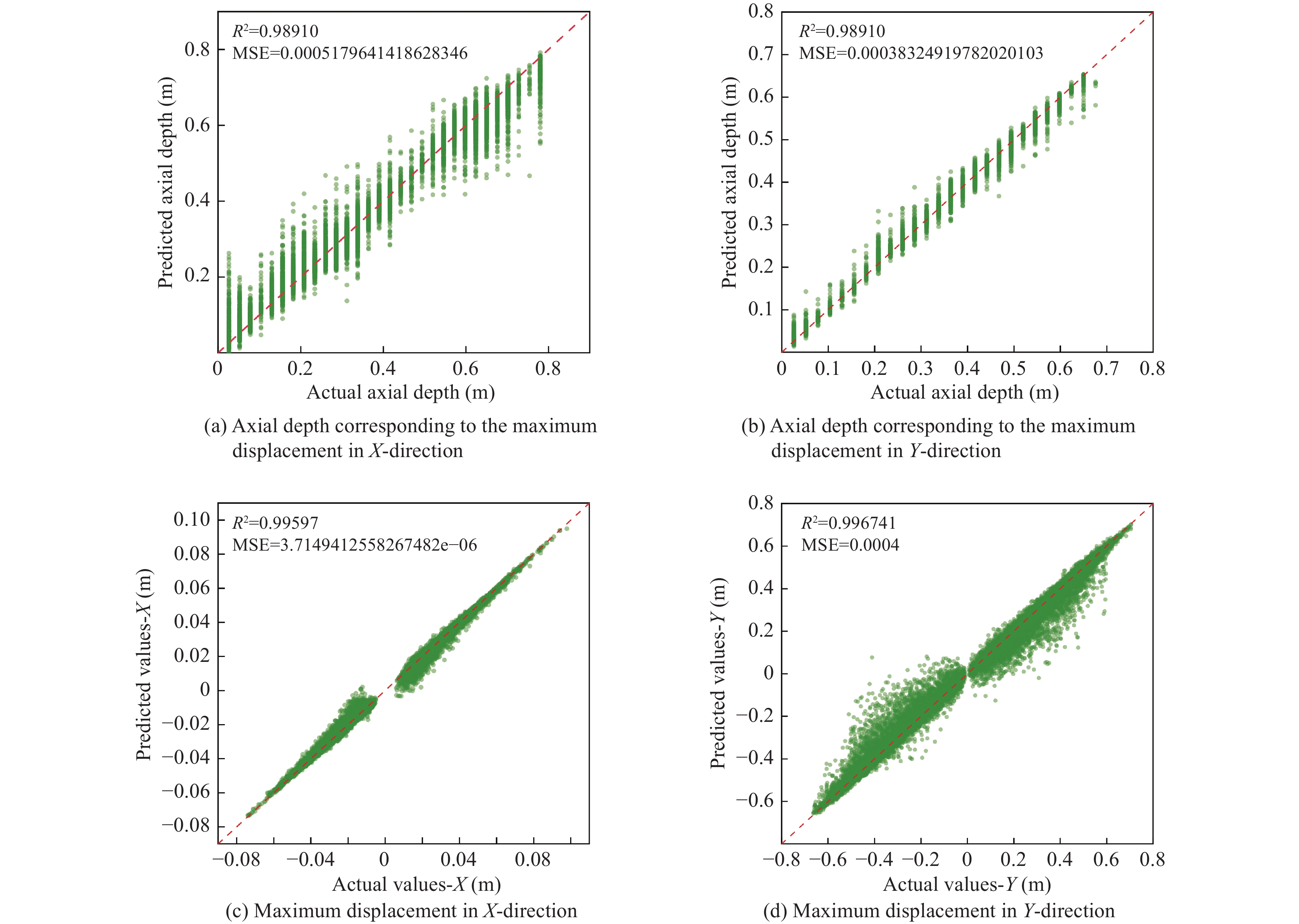
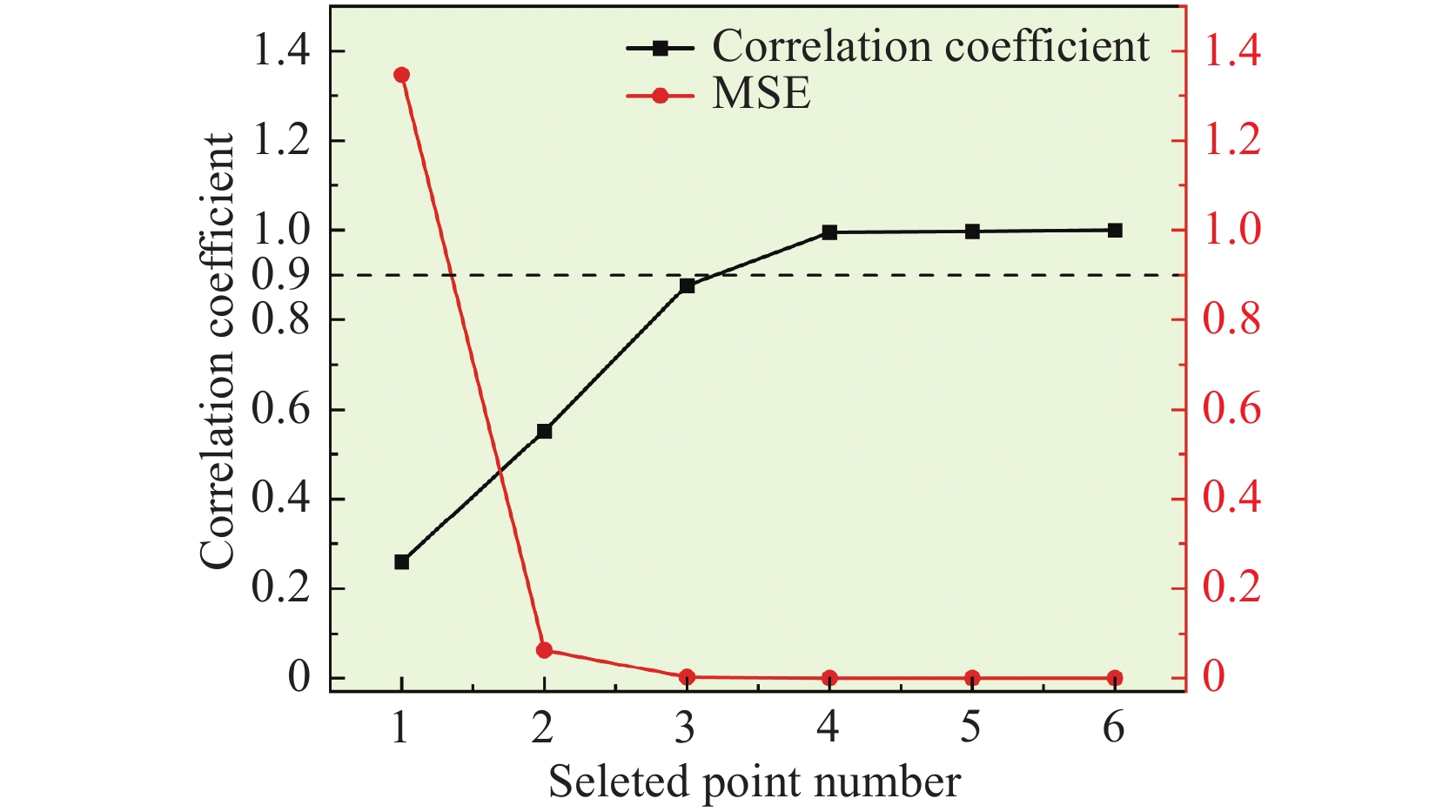
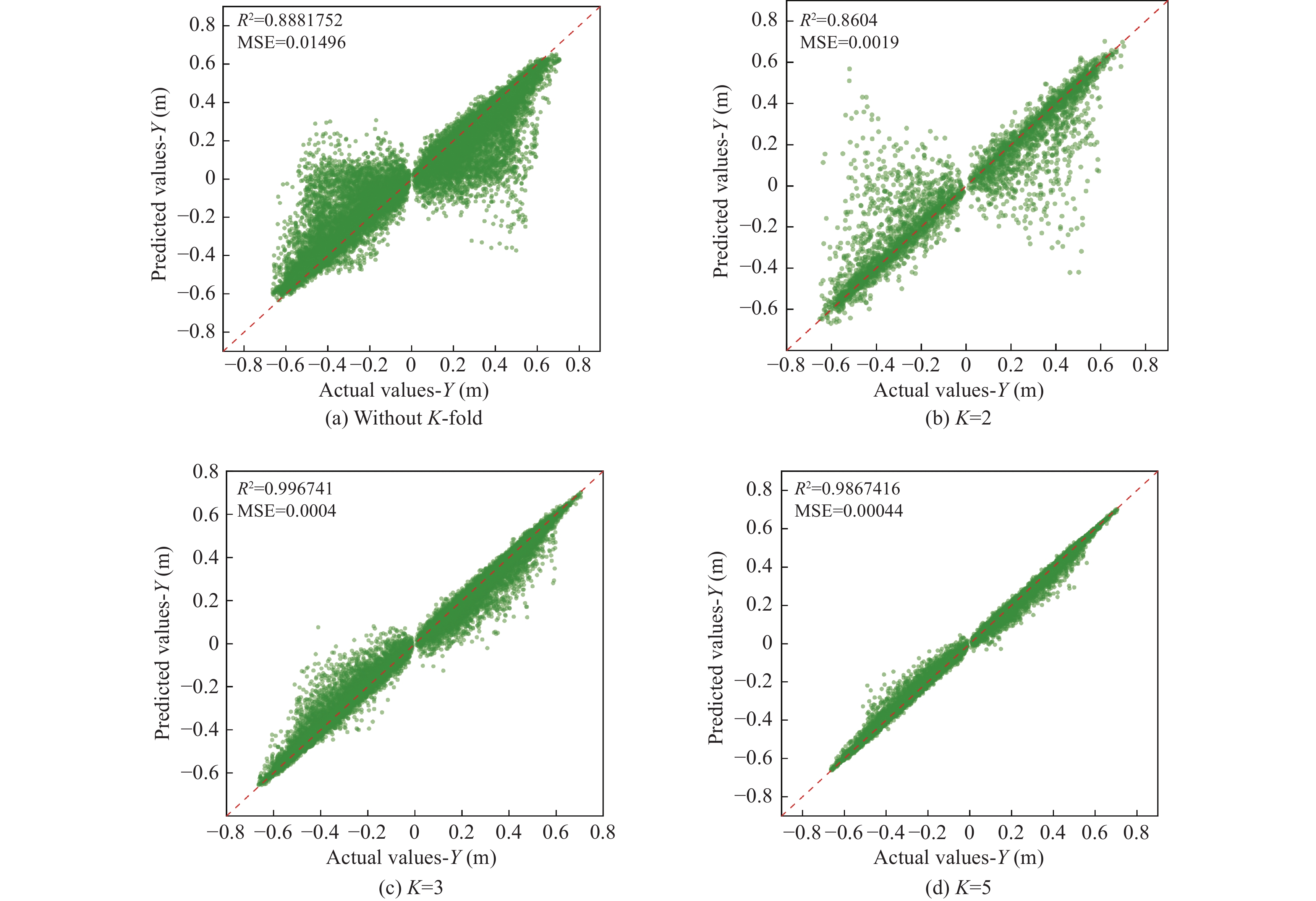
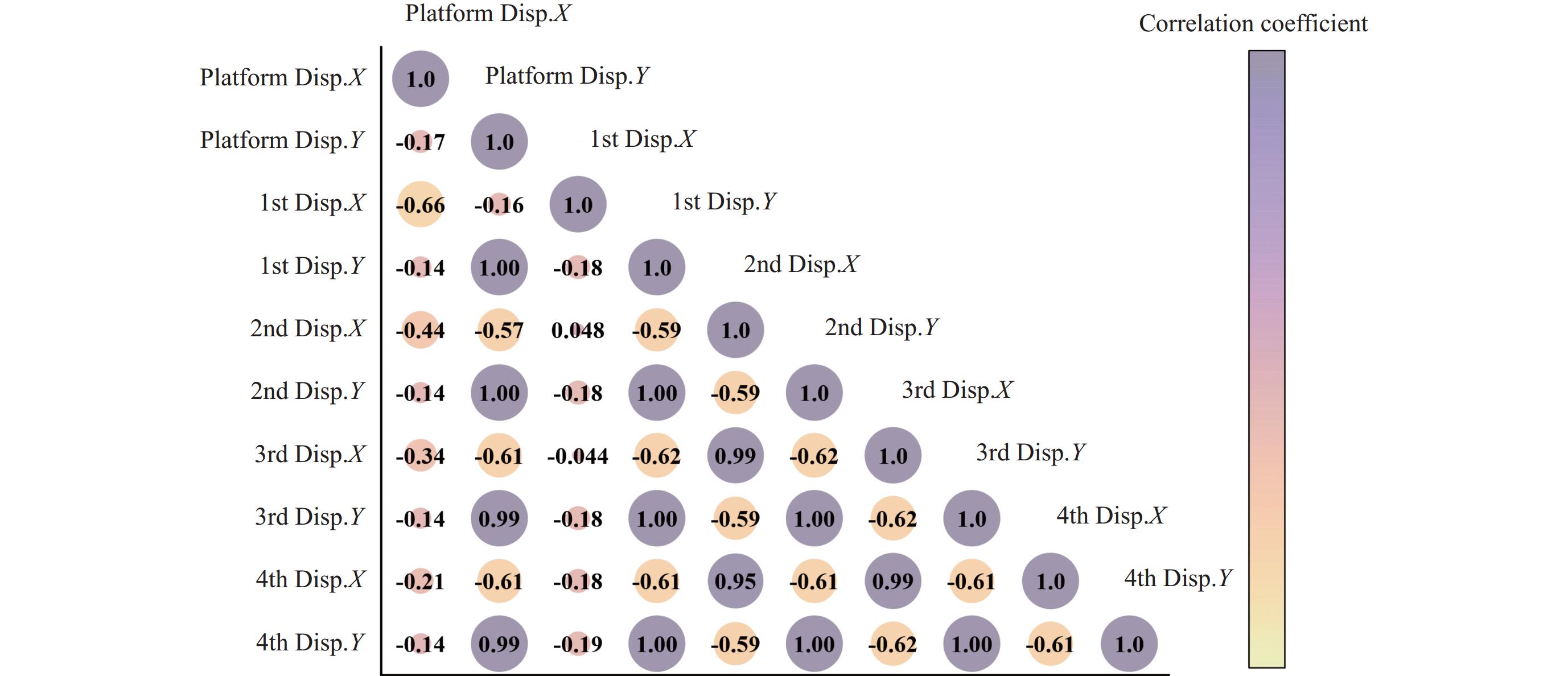
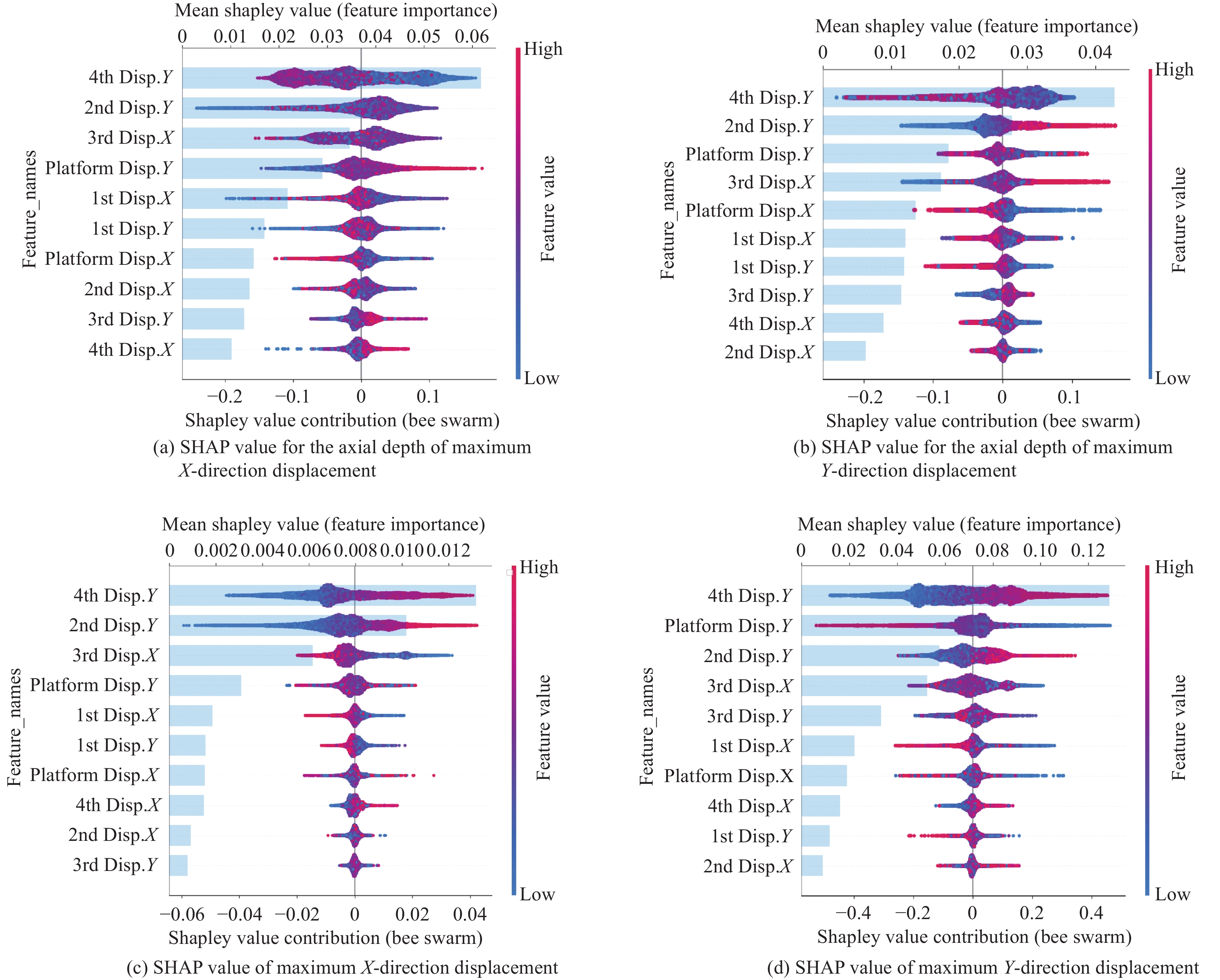
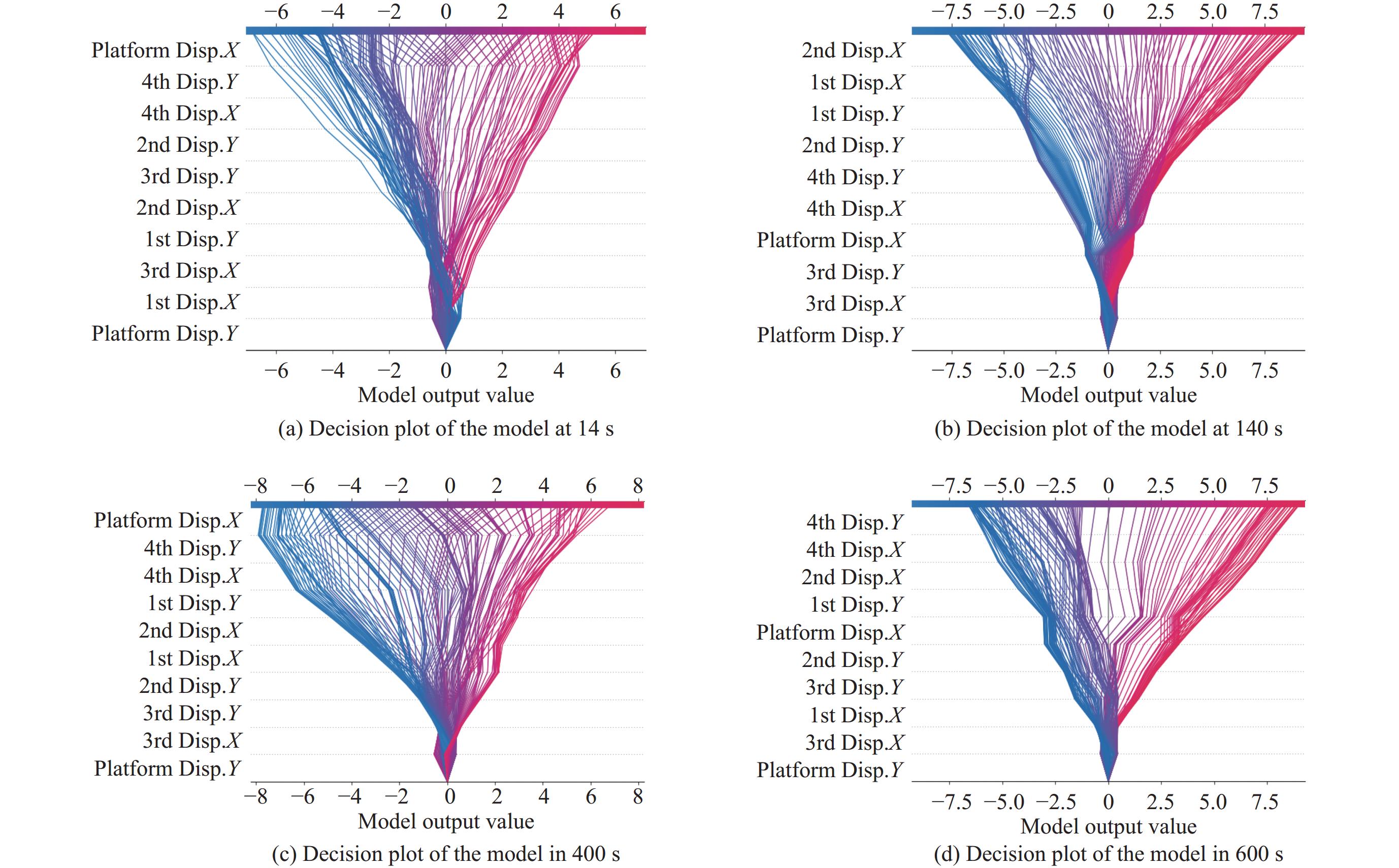
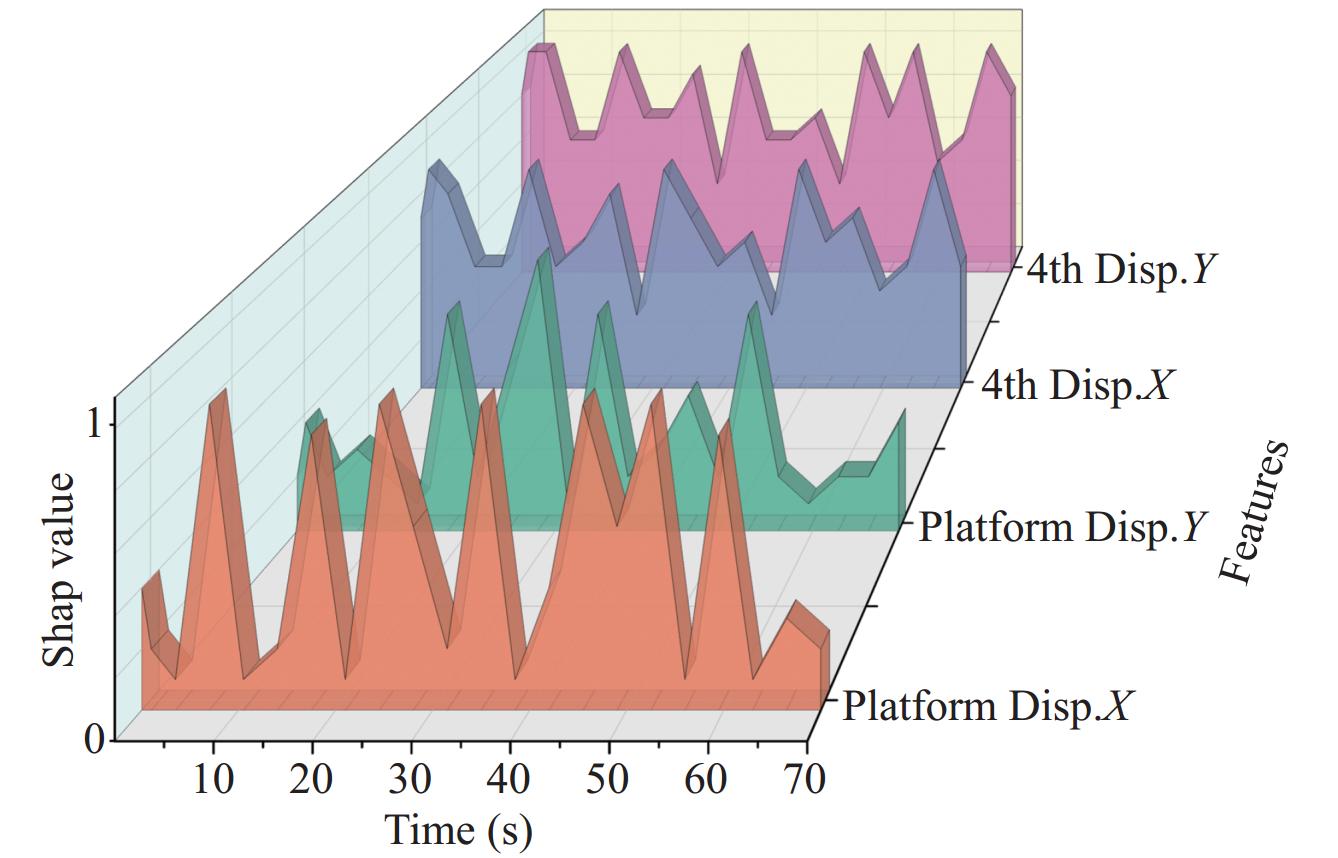
Mitigating vortex-induced vibrations (VIV) in flexible risers represents a critical concern in offshore oil and gas production, considering its potential impact on operational safety and efficiency. The accurate prediction of displacement and position of VIV in flexible risers remains challenging under actual marine conditions. This study presents a data-driven model for riser displacement prediction that corresponds to field conditions. Experimental data analysis reveals that the XGBoost algorithm predicts the maximum displacement and position with superior accuracy compared with Support vector regression (SVR), considering both computational efficiency and precision. Platform displacement in the Y-direction demonstrates a significant positive correlation with both axial depth and maximum displacement magnitude. The fourth point displacement exhibits the highest contribution to model prediction outcomes, showing a positive influence on maximum displacement while negatively affecting the axial depth of maximum displacement. Platform displacement in the X- and Y-directions exhibits competitive effects on both the riser’s maximum displacement and its axial depth. Through the implementation of XGBoost algorithm and SHapley Additive exPlanation (SHAP) analysis, the model effectively estimates the riser’s maximum displacement and its precise location. This data-driven approach achieves predictions using minimal, readily available data points, enhancing its practical field applications and demonstrating clear relevance to academic and professional communities.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 806 -821
doi: 10.1007/s13344-025-0063-0
[Abstract](0)
Abstract:
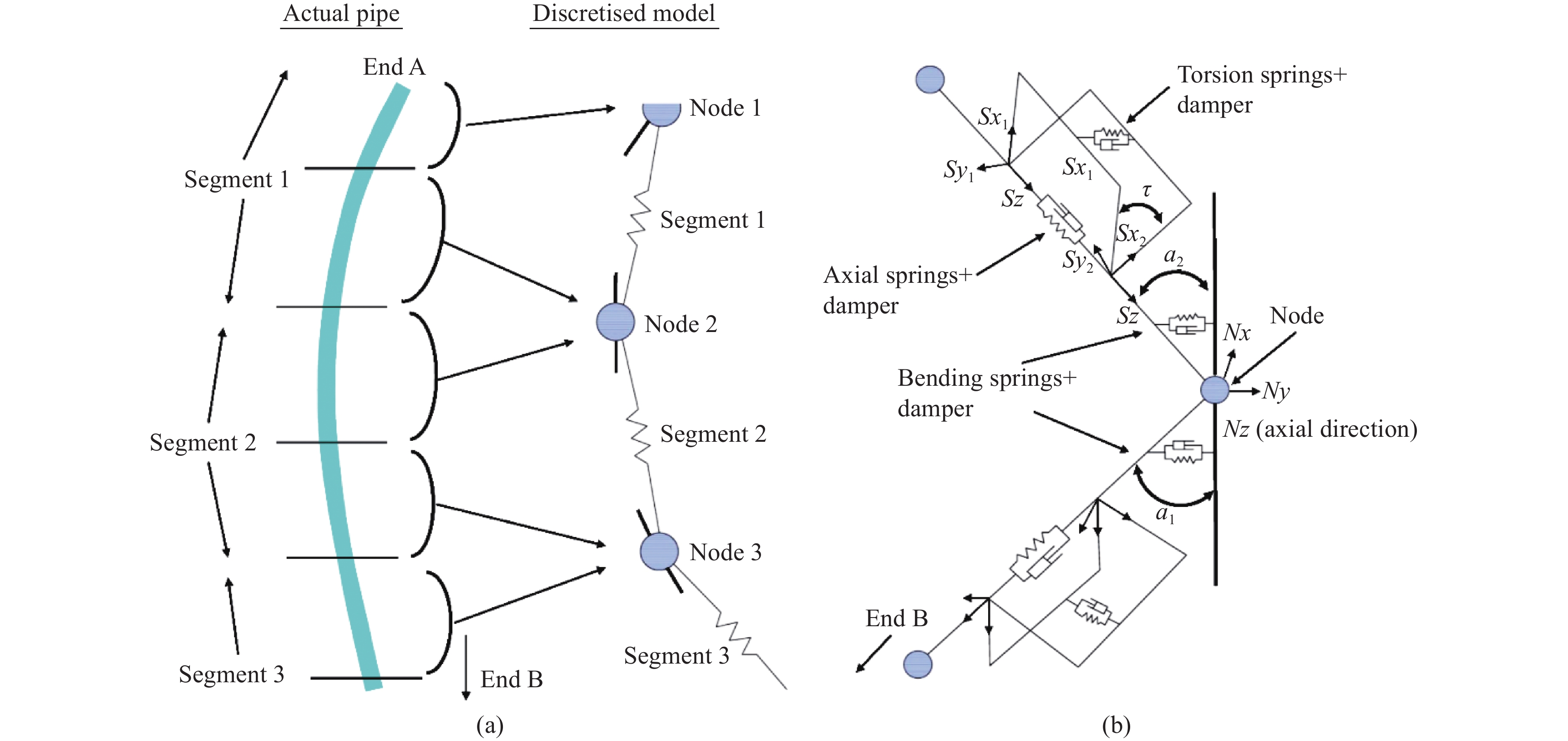
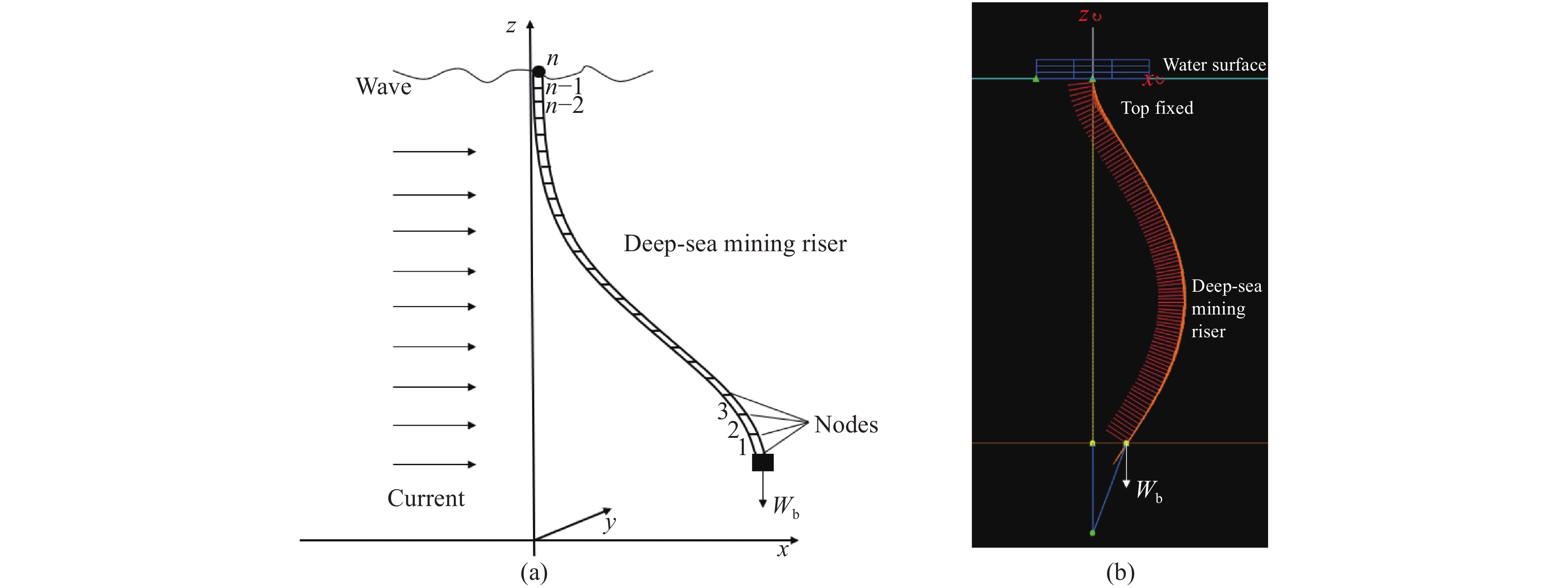
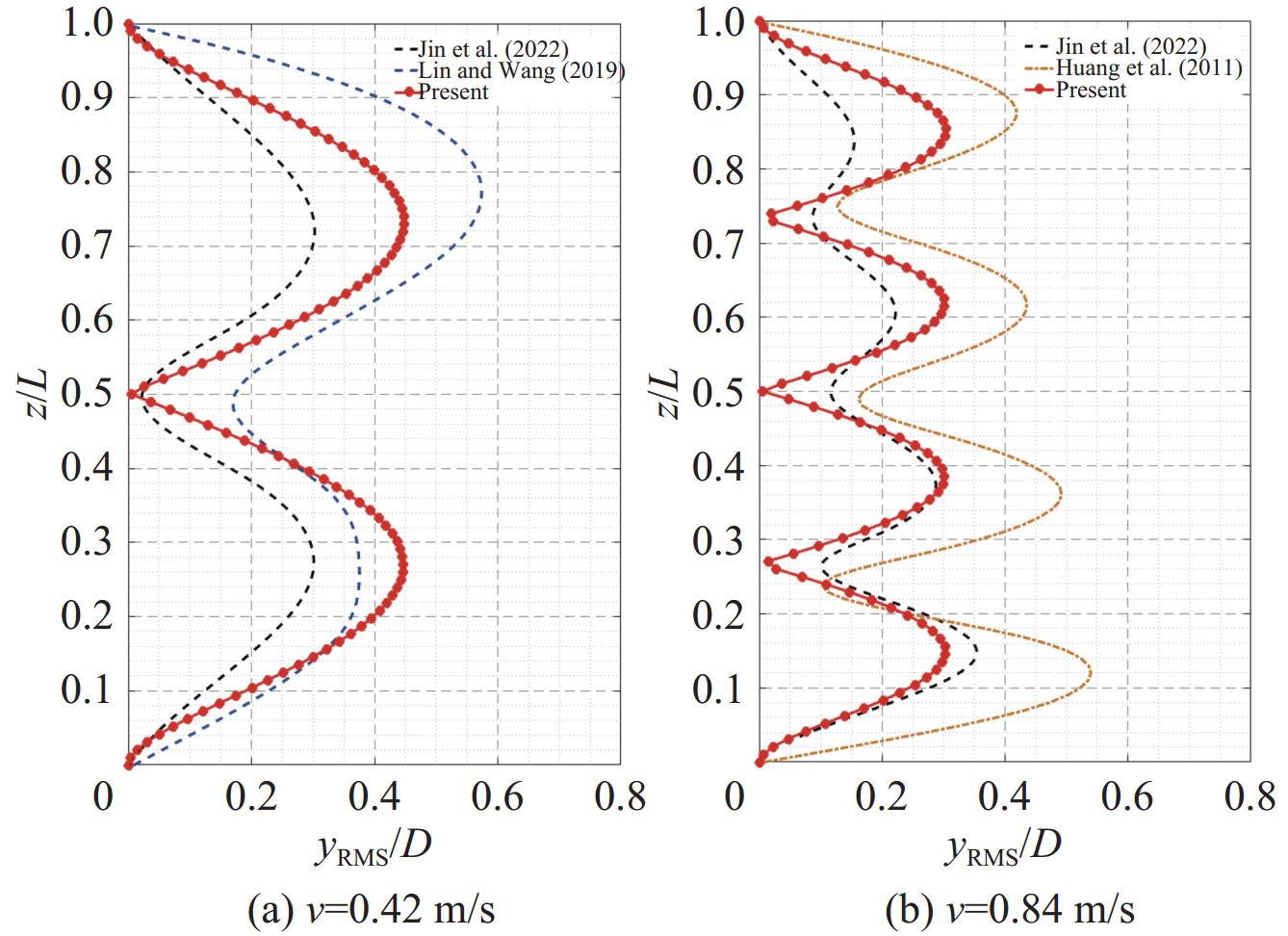
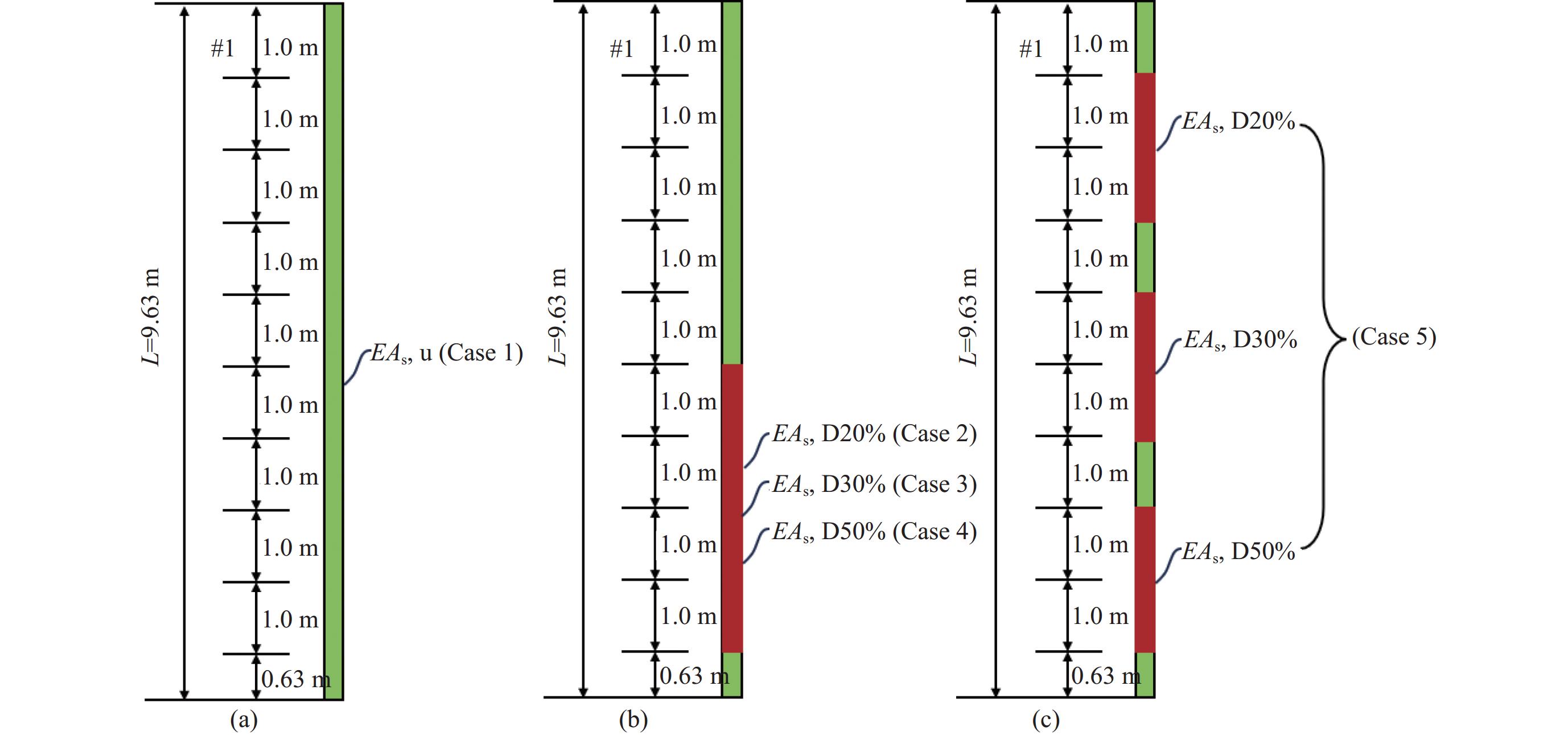
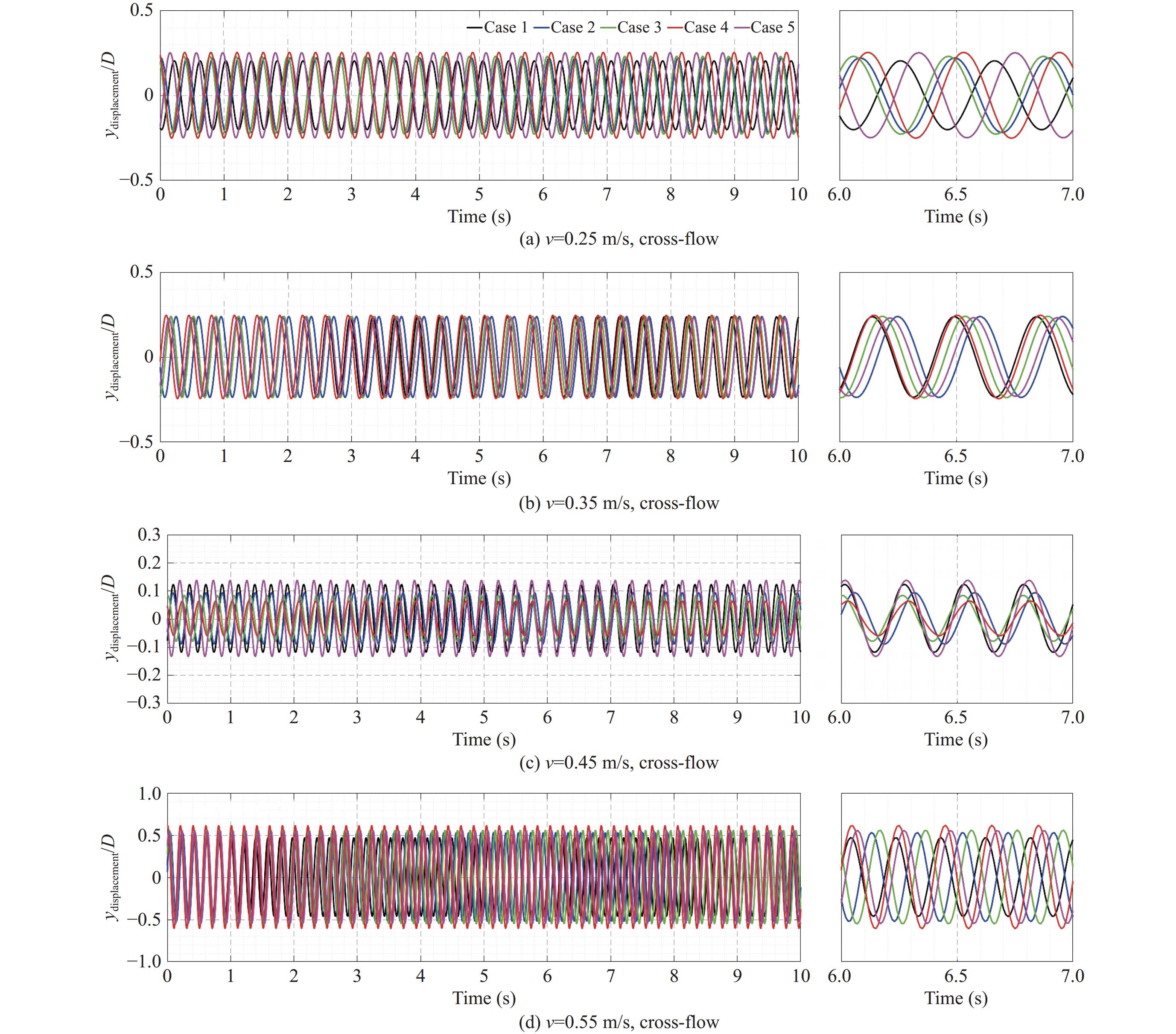
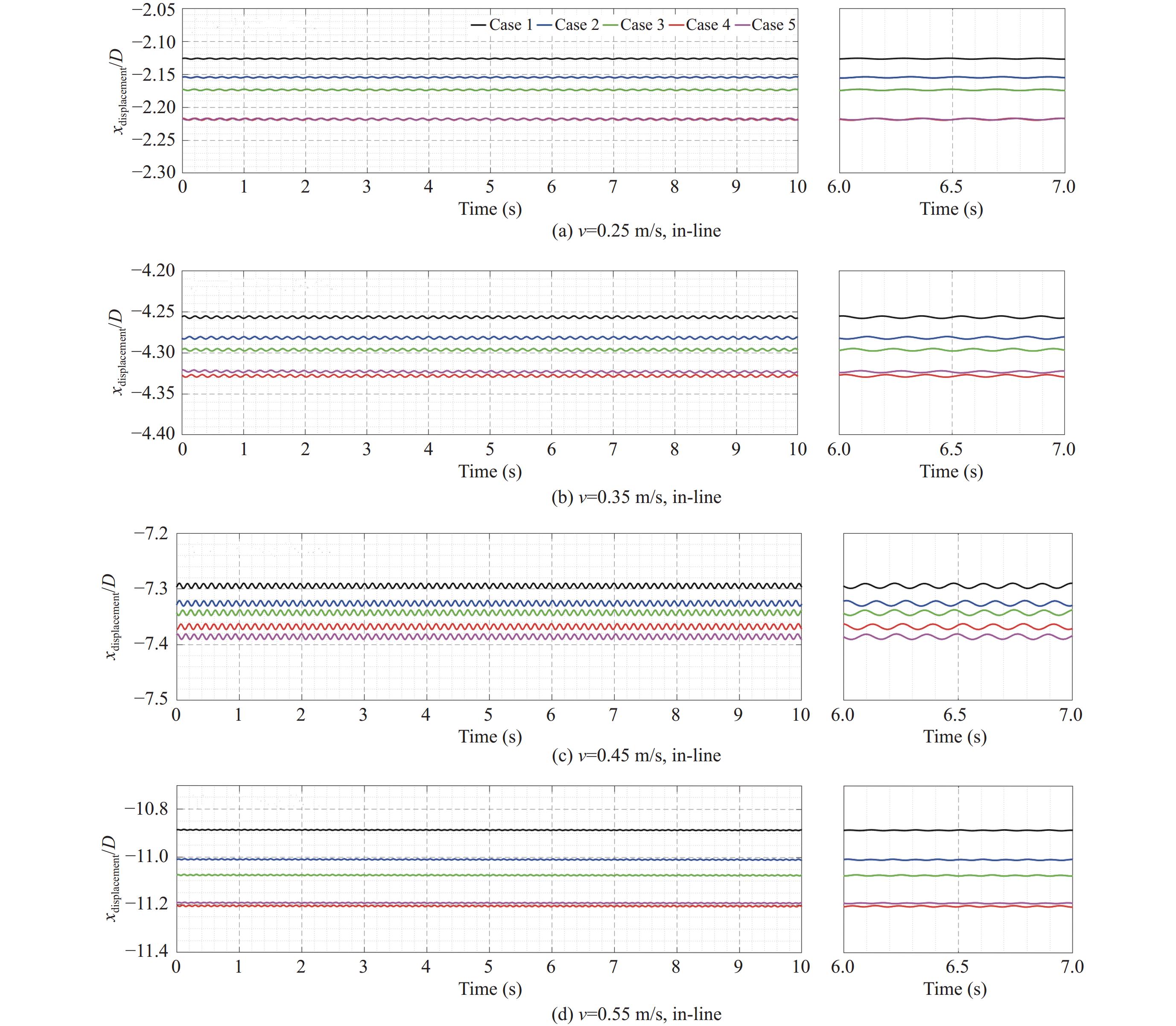
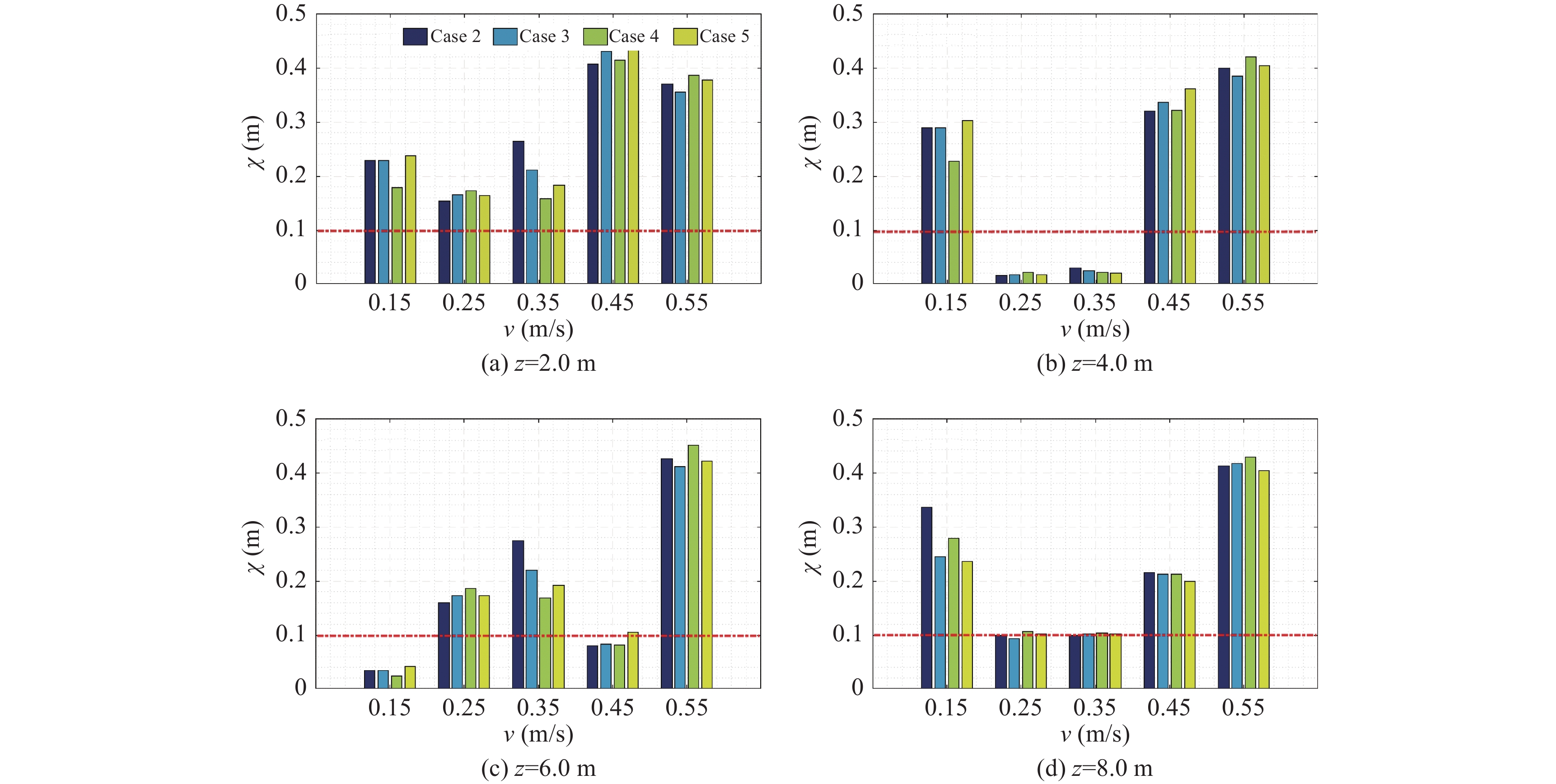
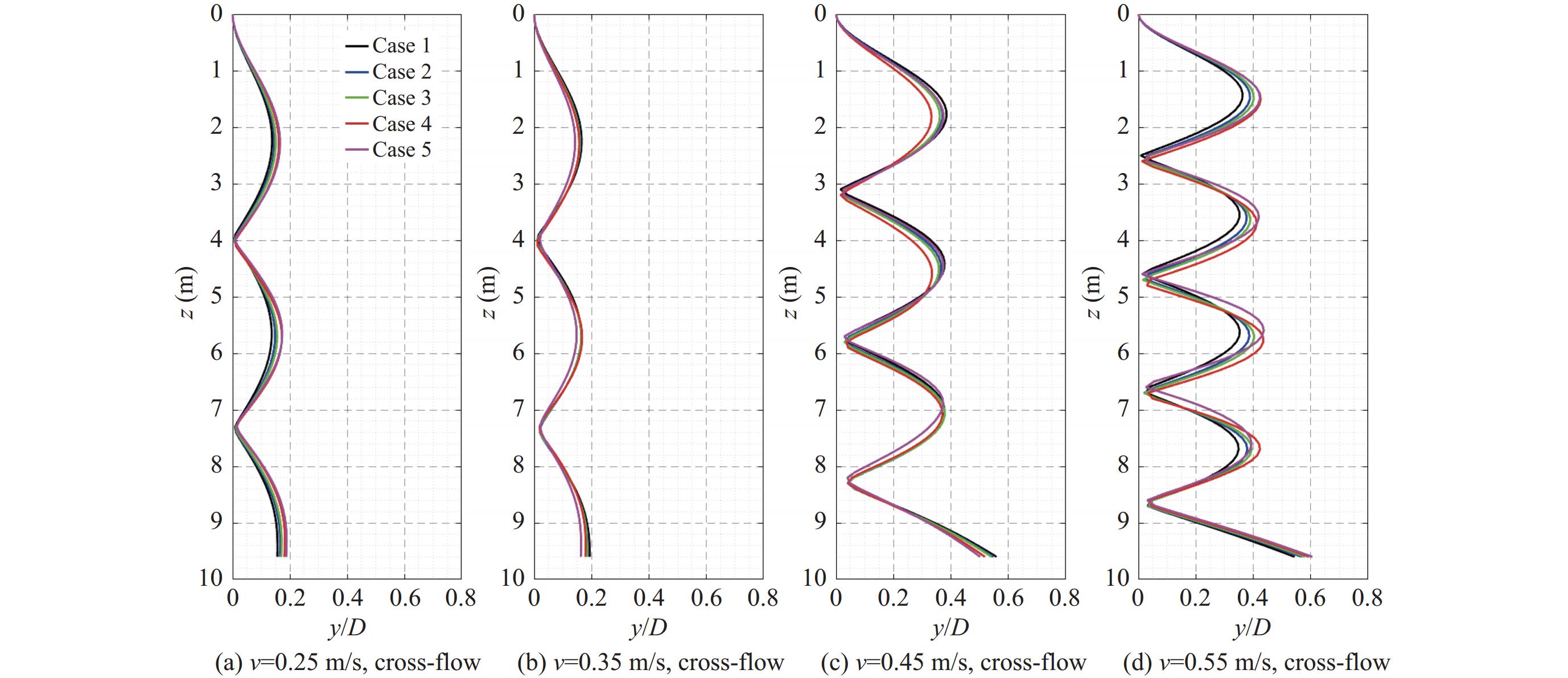
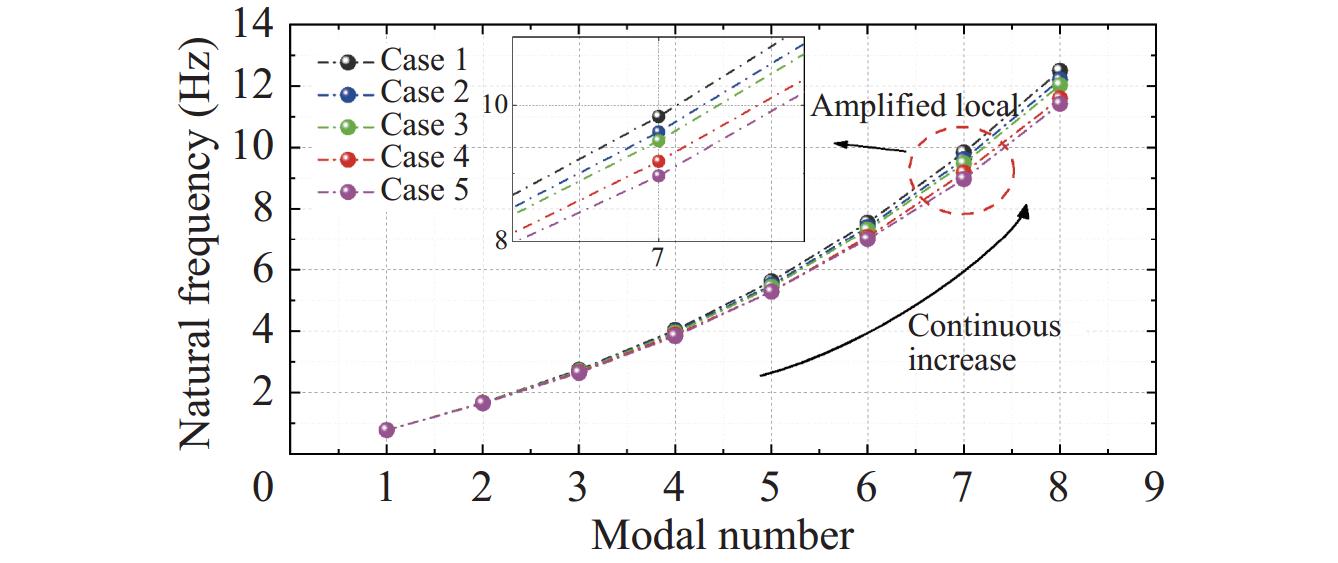
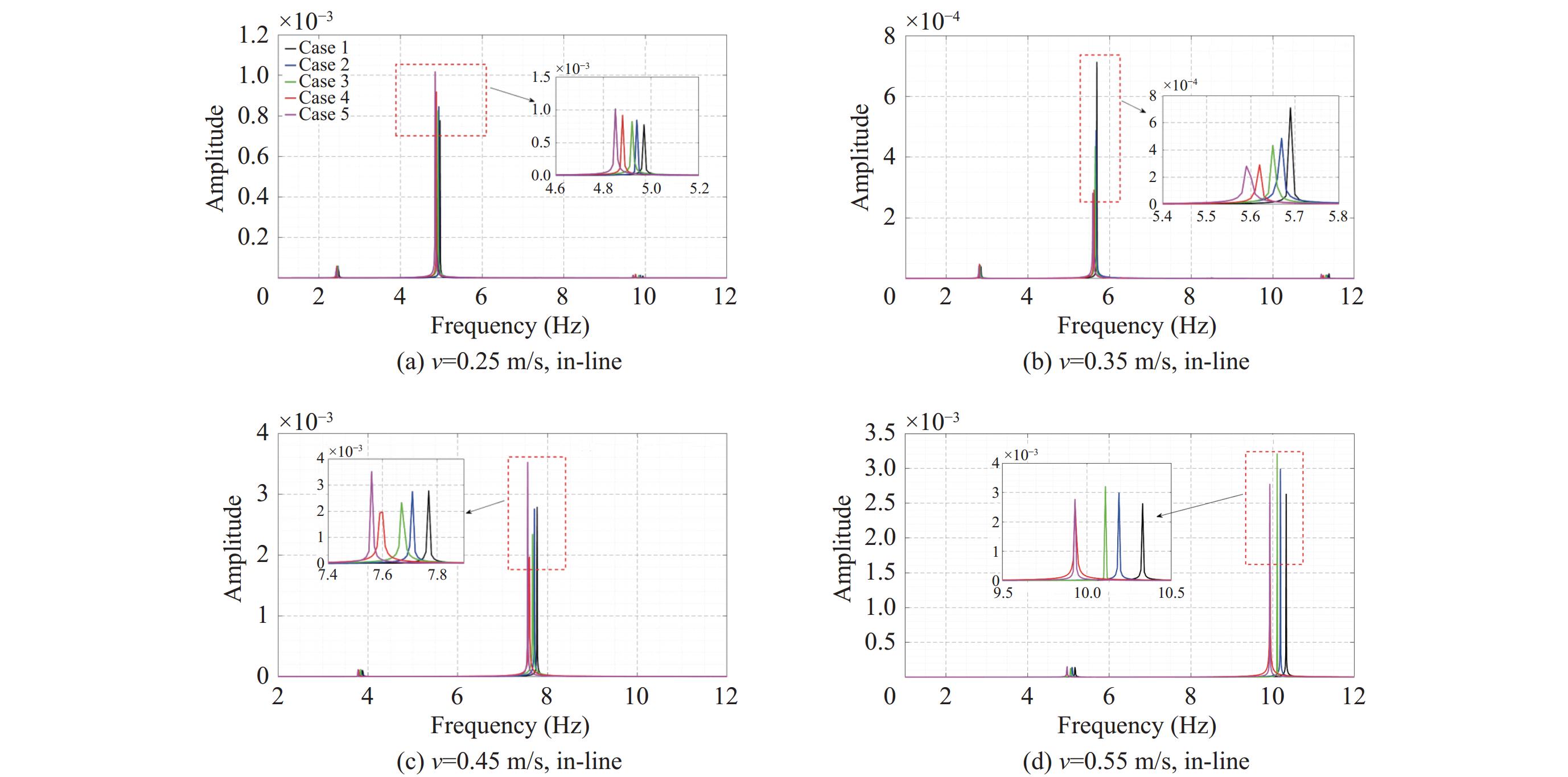
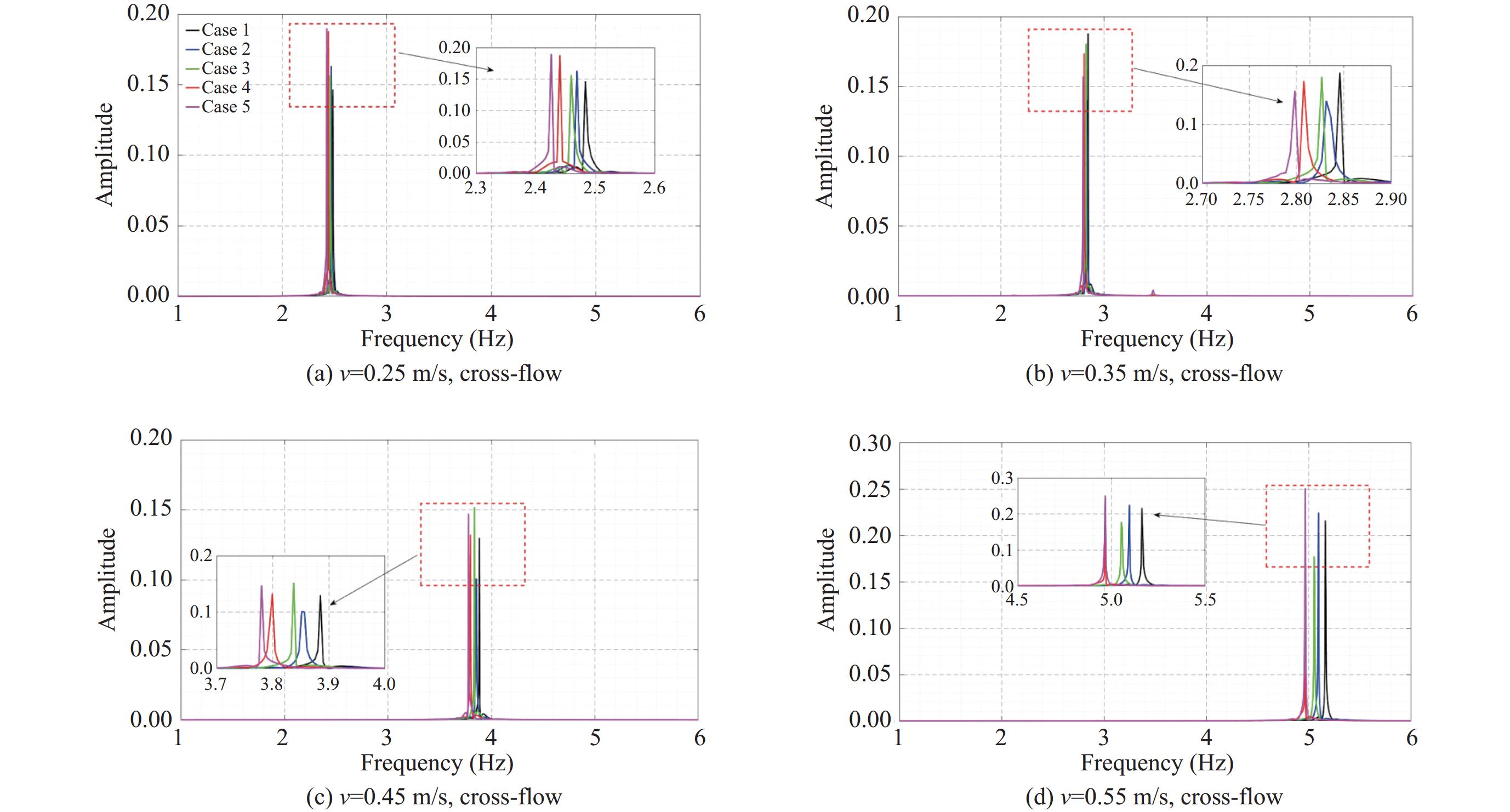
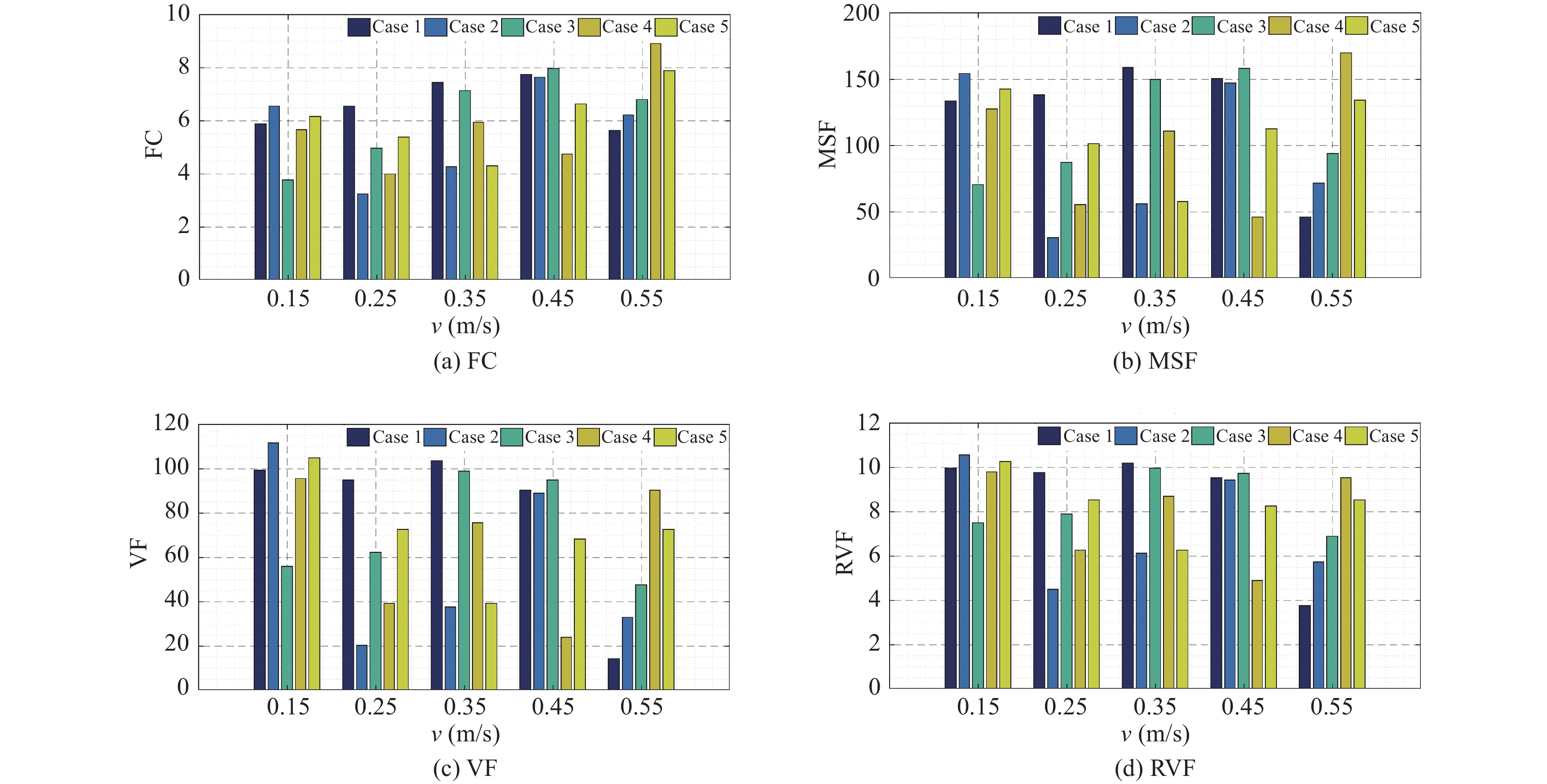
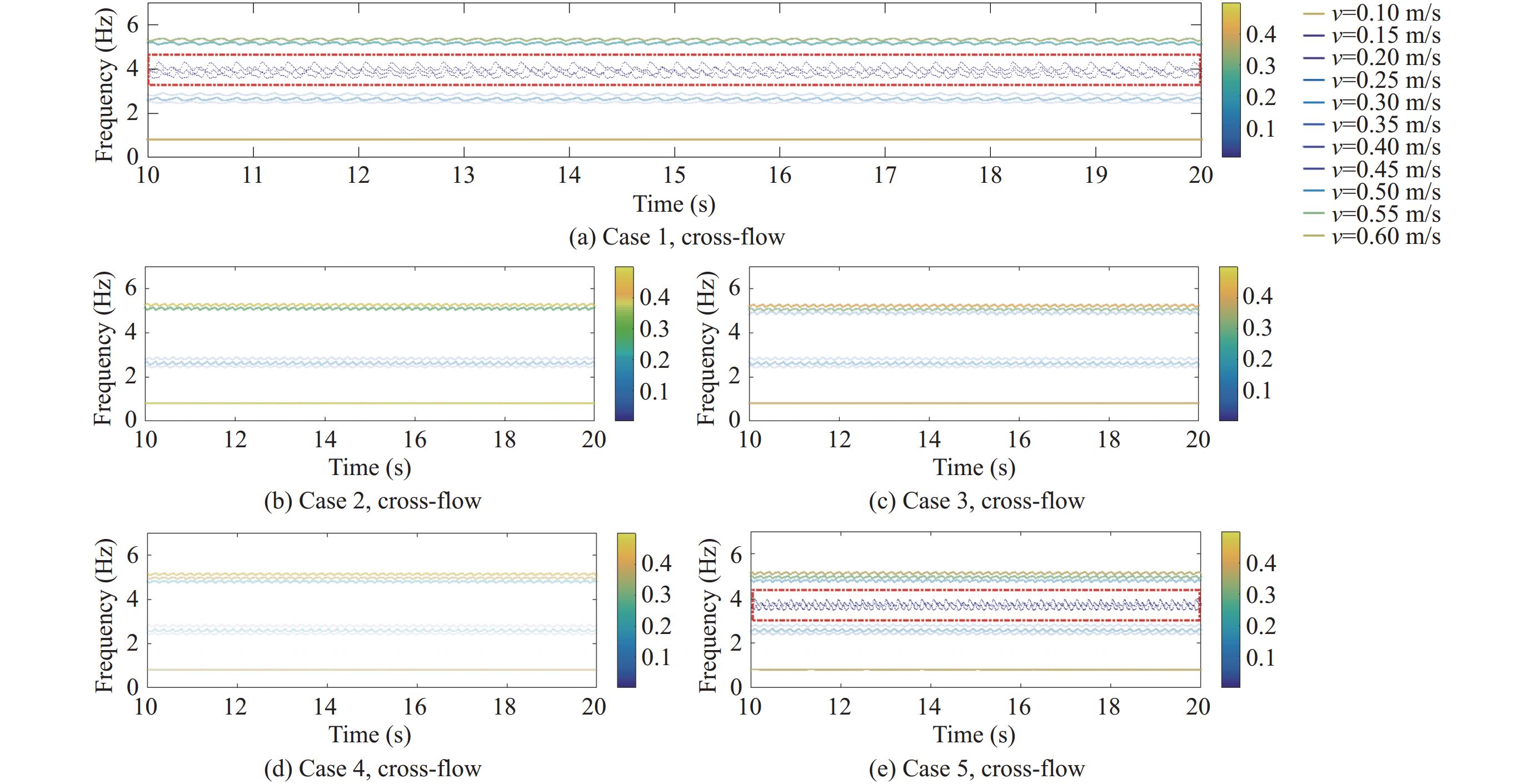
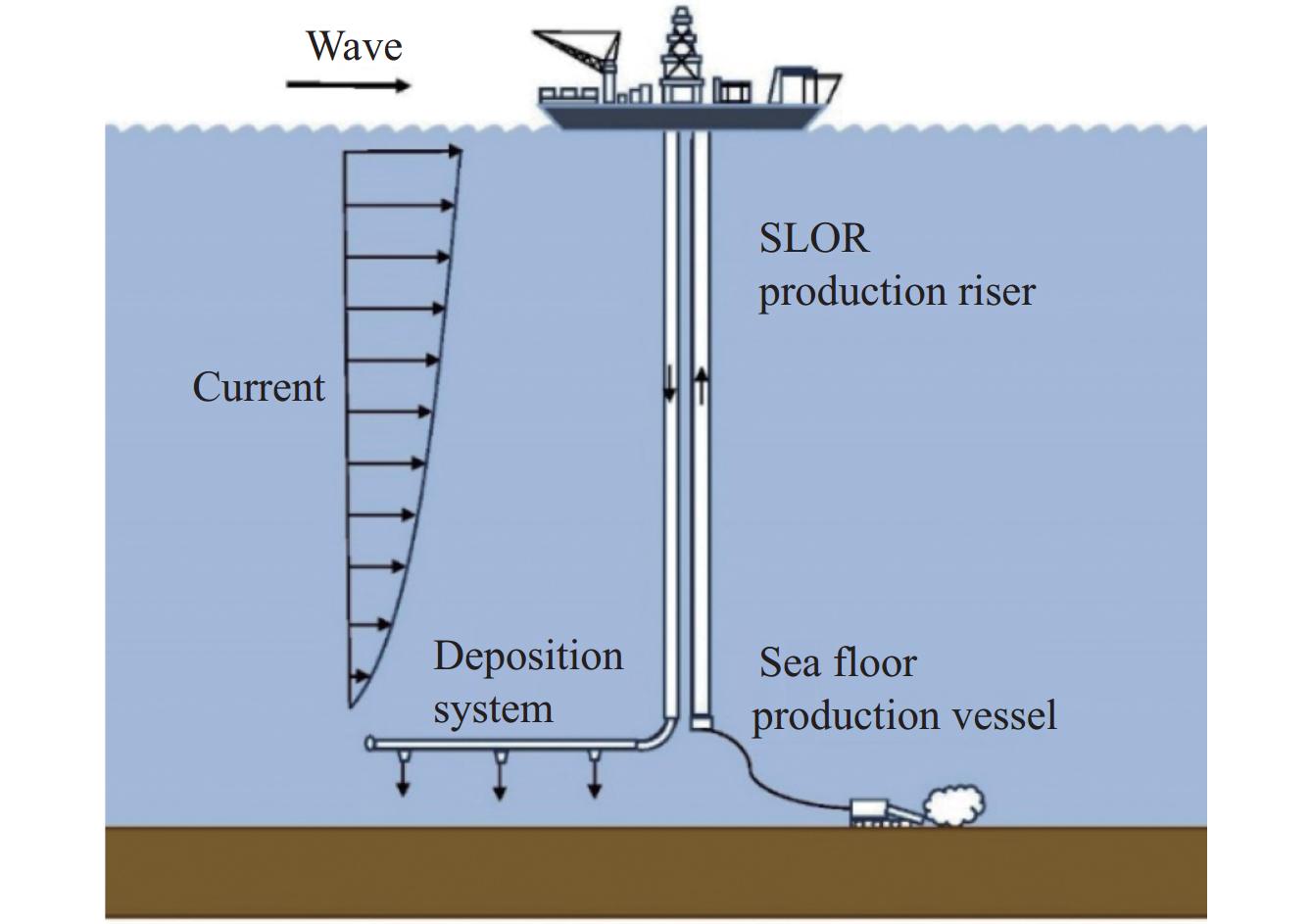
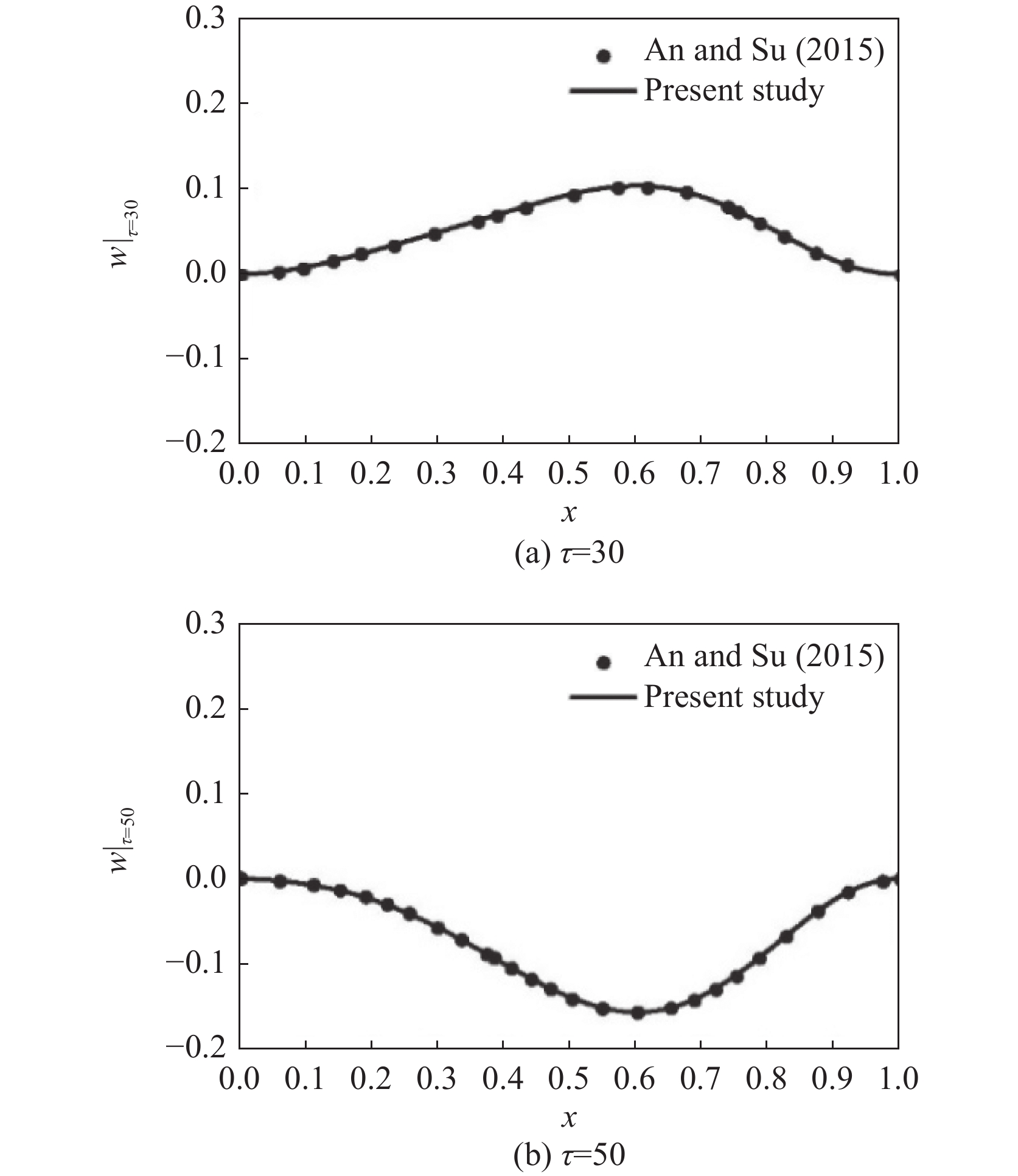
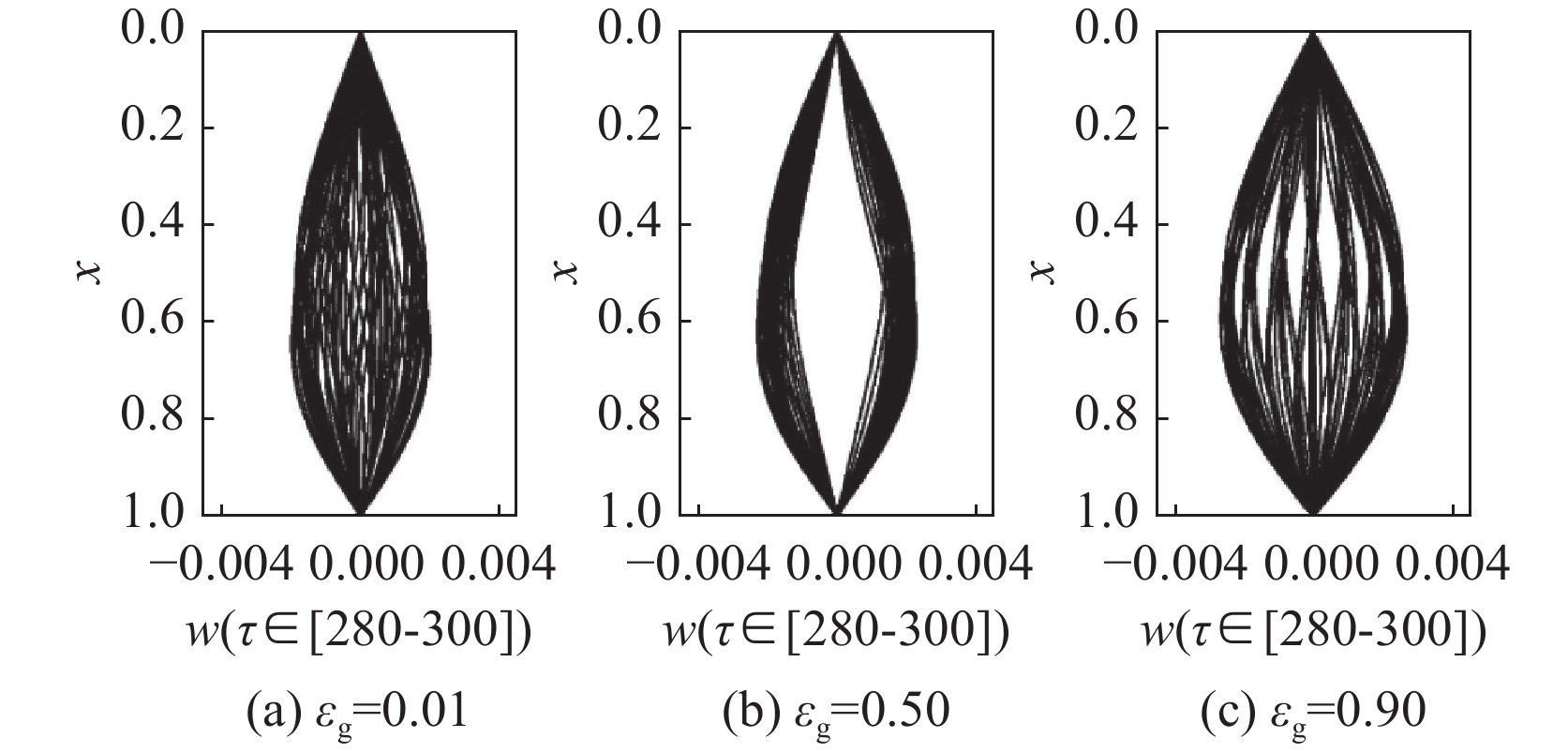
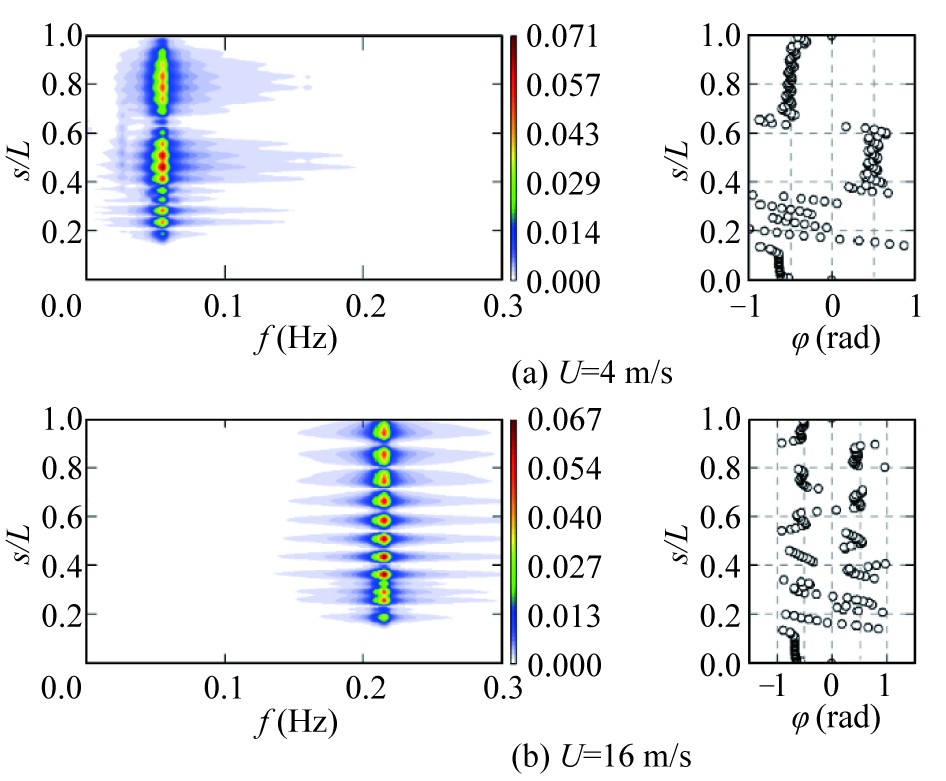
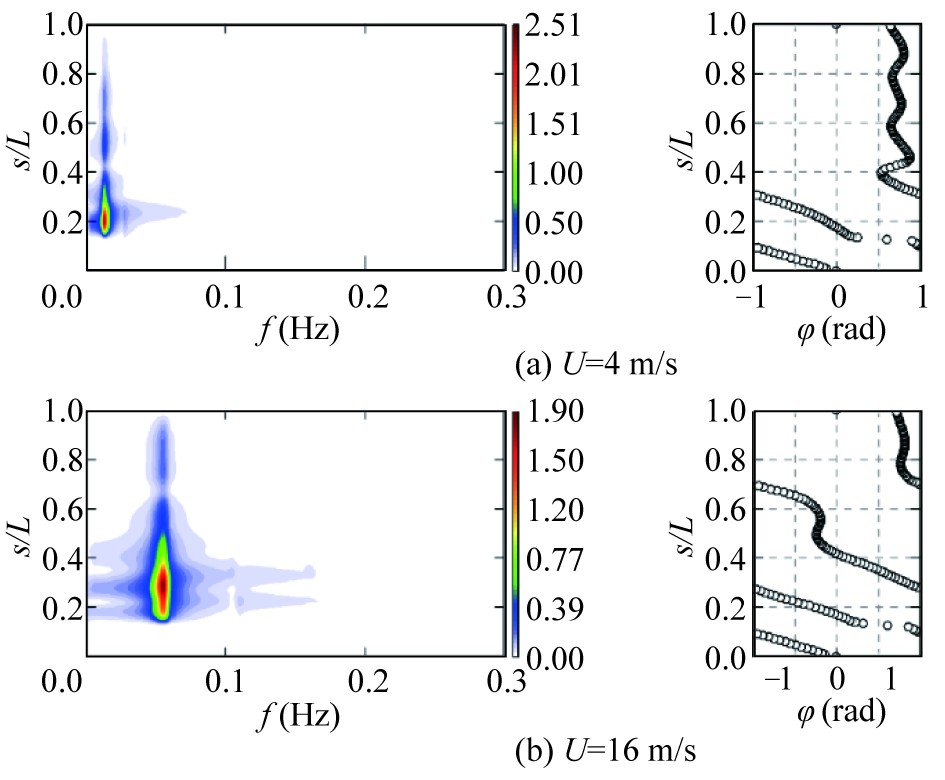
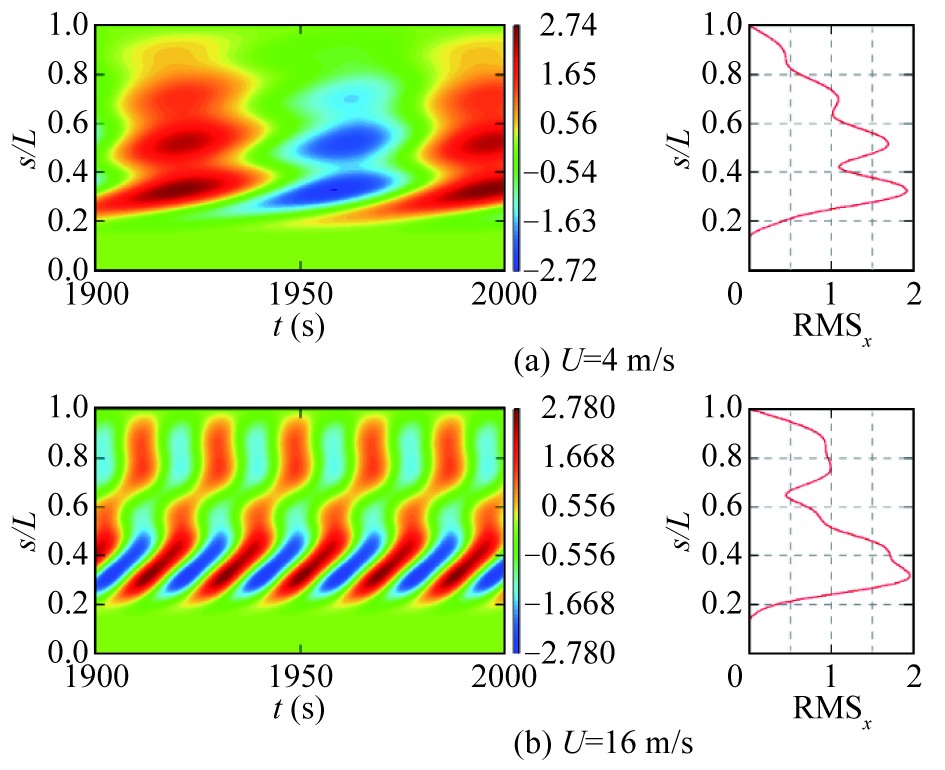
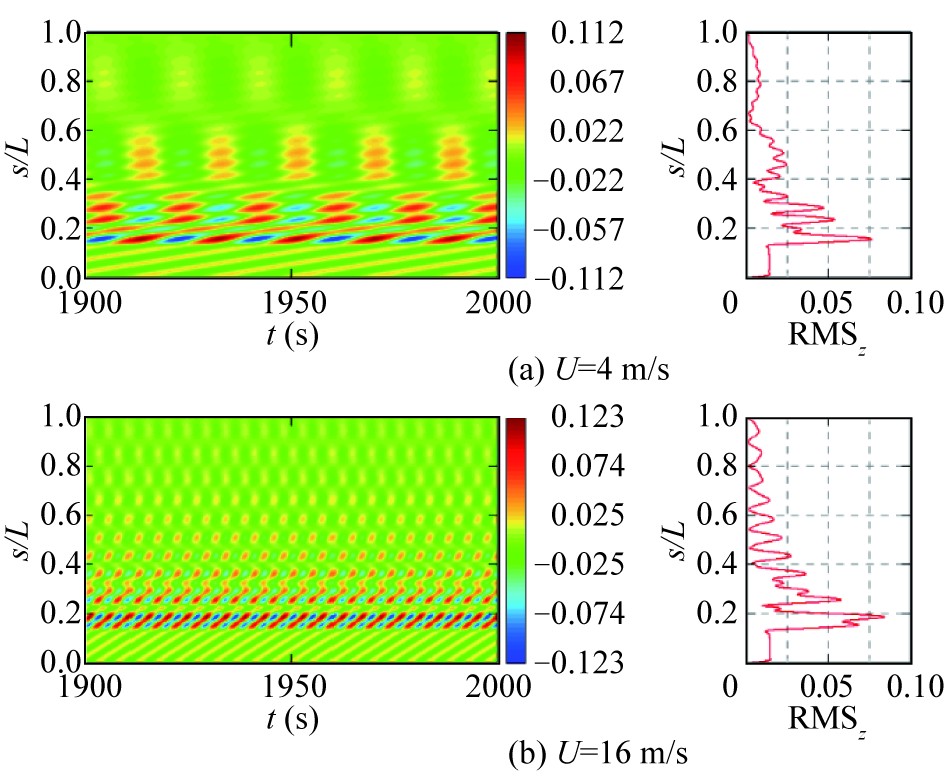
A deep-sea mining riser is a crucial component of the system used to lift seafloor mineral resources to the vessel. It is prone to damage and failure because of harsh environmental conditions and internal fluid erosion. Furthermore, damage can impact the response characteristics of the riser, but varying environmental loadings easily mask it. Thus, distinguishing between riser damage and environmental effects poses a considerable challenge. To address this issue, a cantilevered model is created for a deep-sea mining riser via the concentrated mass method, and a time-domain analytical strategy is developed. The vortex-induced vibration (VIV) response characteristics of the riser are initially examined, considering various damage conditions and flow velocities. The study results revealed four primary observations: (a) effective tension can serve as a reliable indicator for identifying damage at lower velocities; (b) there are noticeable differences in displacement between the healthy and damaged risers in the in-line direction rather than the cross-flow direction; (c) frequency characteristics can more effectively distinguish the damage conditions at high flow velocities, with the mean square frequency and frequency variance being more effective than the centroid frequency and root variance frequency; (d) displacement differences are more sensitive to damage occurring near the top and bottom of the riser, while both velocity variations and structural damage can influence displacements, especially in regions between modal nodes. The vibrational behavior and damage indicators are clarified for structural health monitoring of deep-sea mining risers during lifting operations.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 822 -838
doi: 10.1007/s13344-025-0064-z
[Abstract](0)
Abstract:
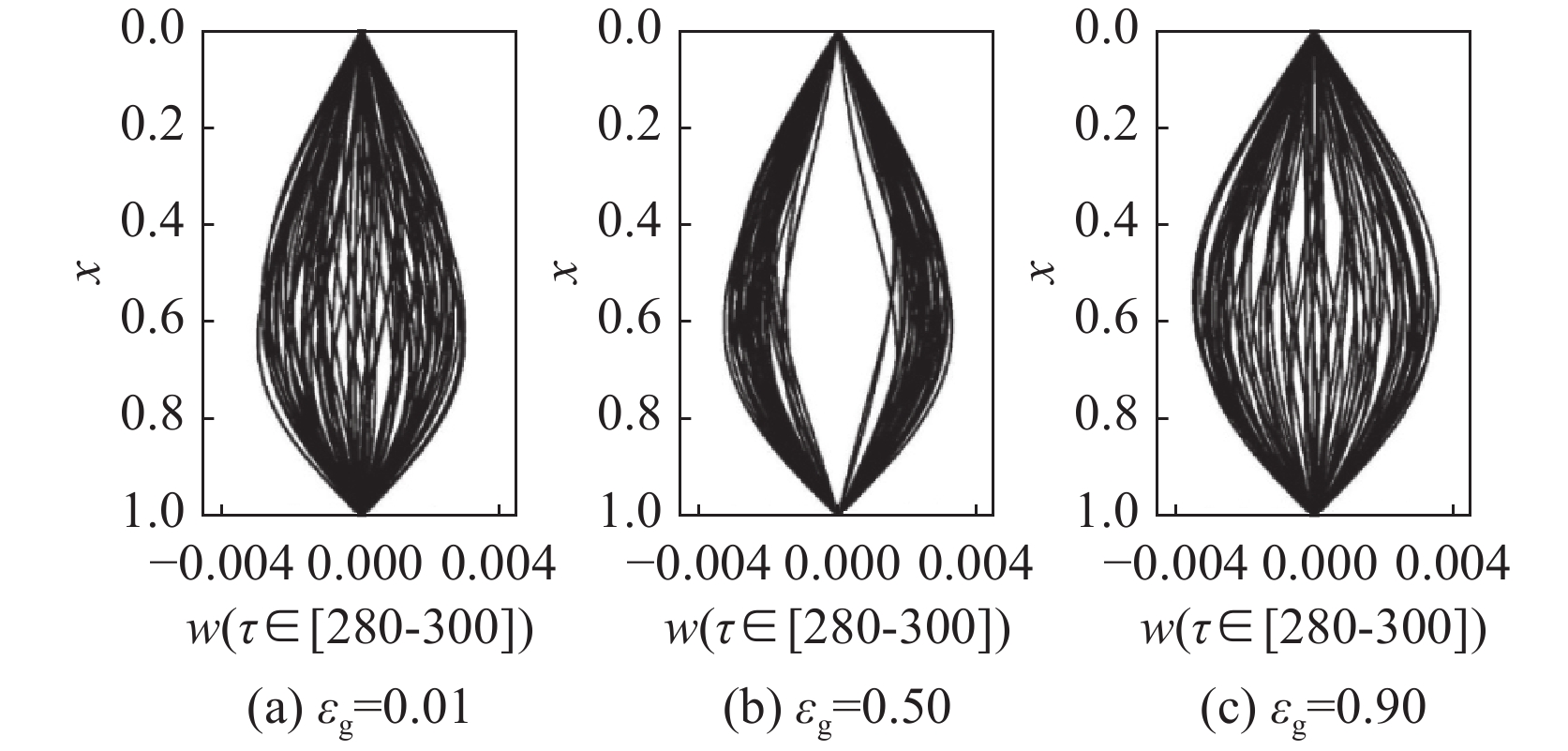
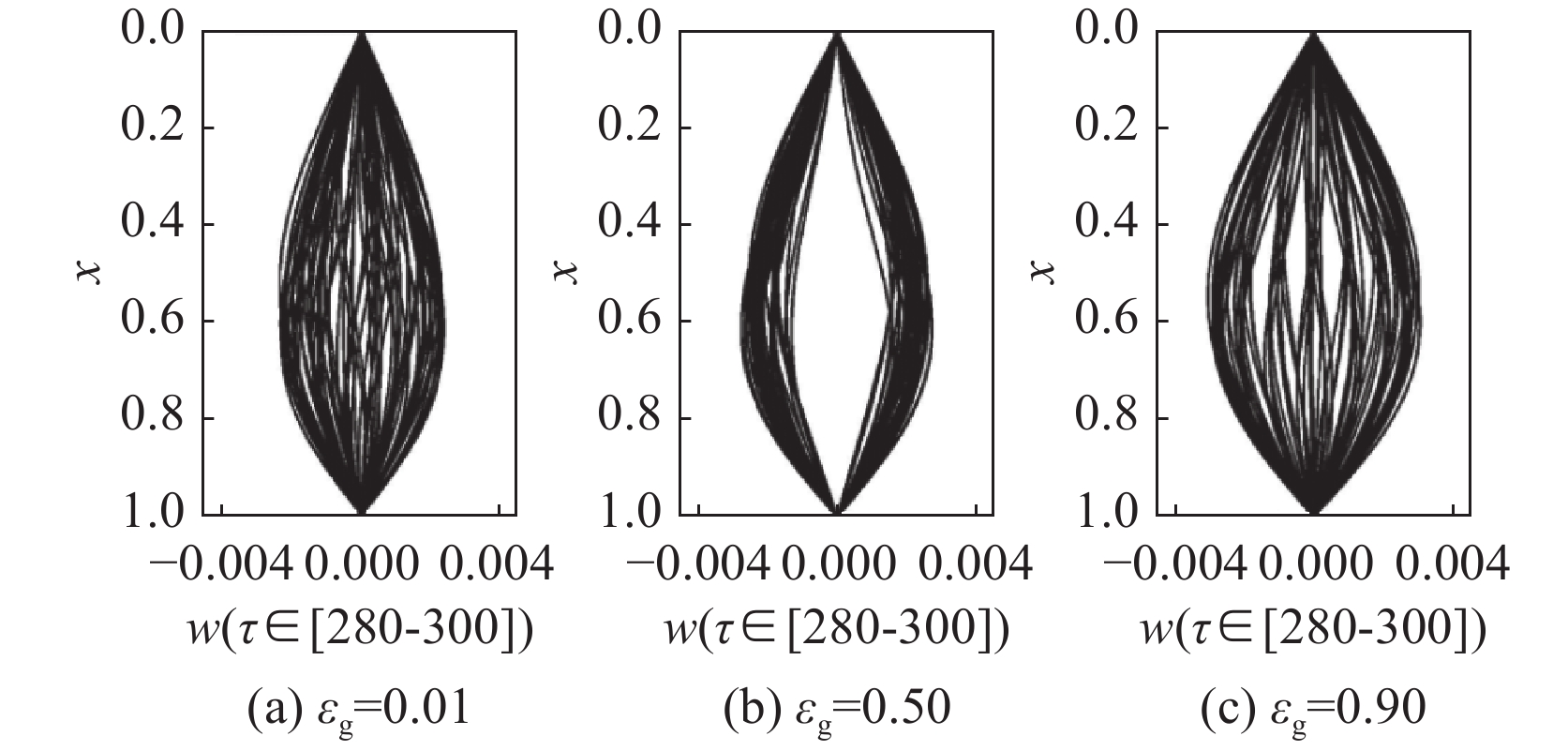
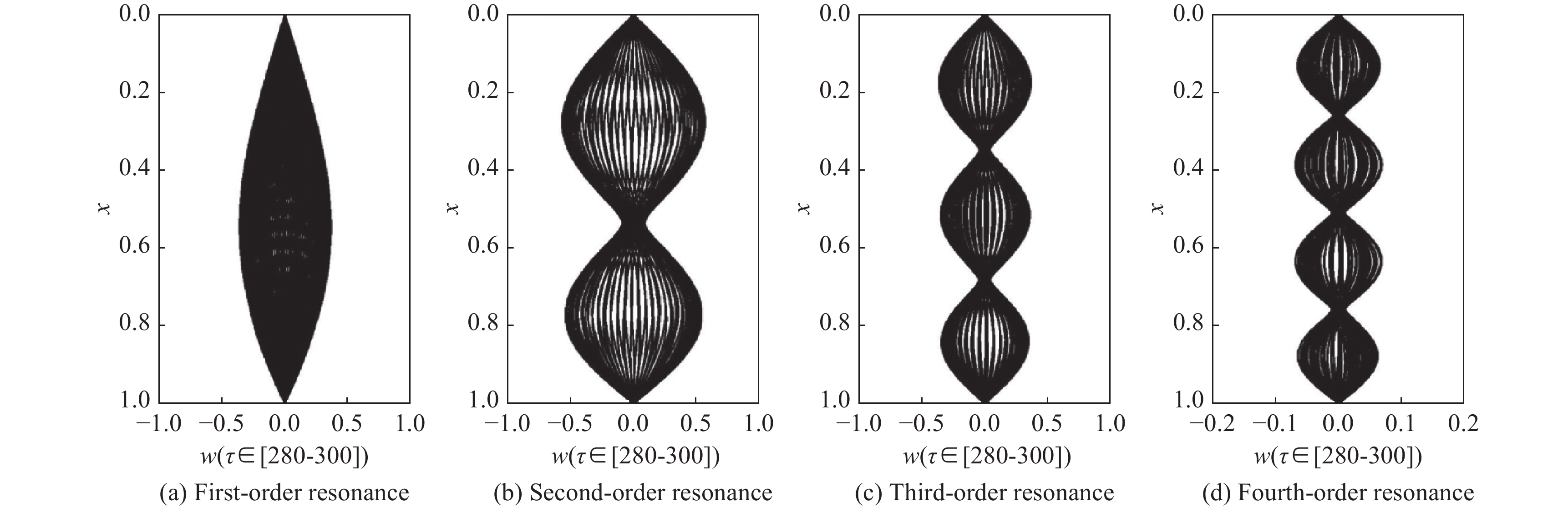
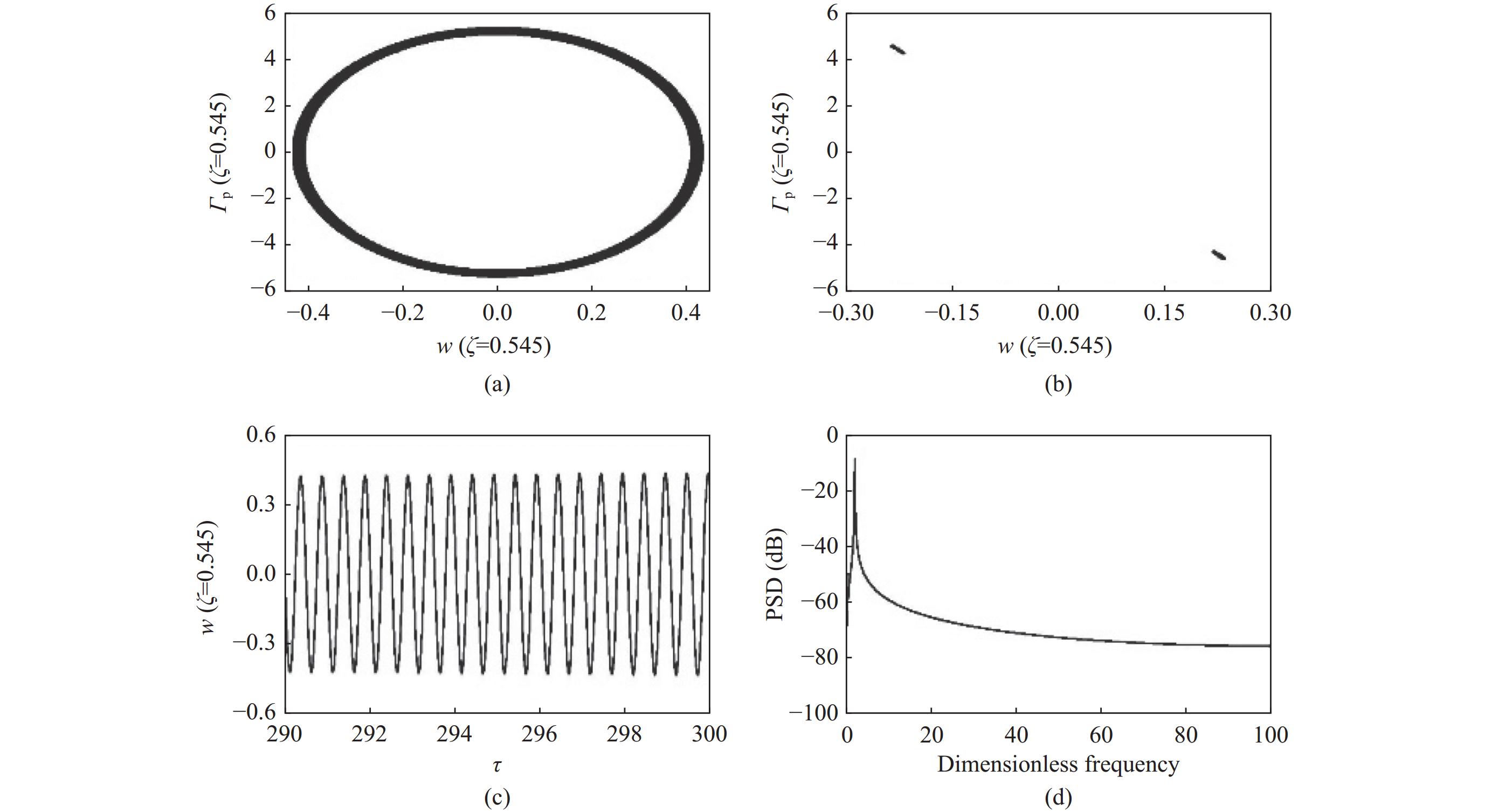
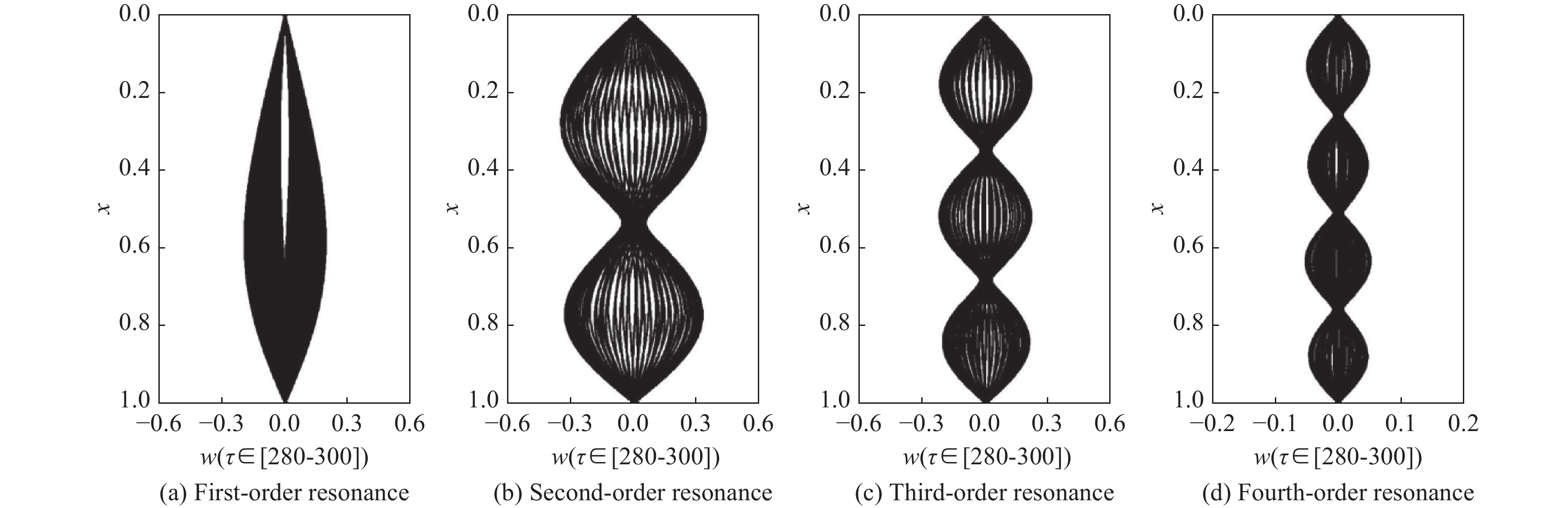
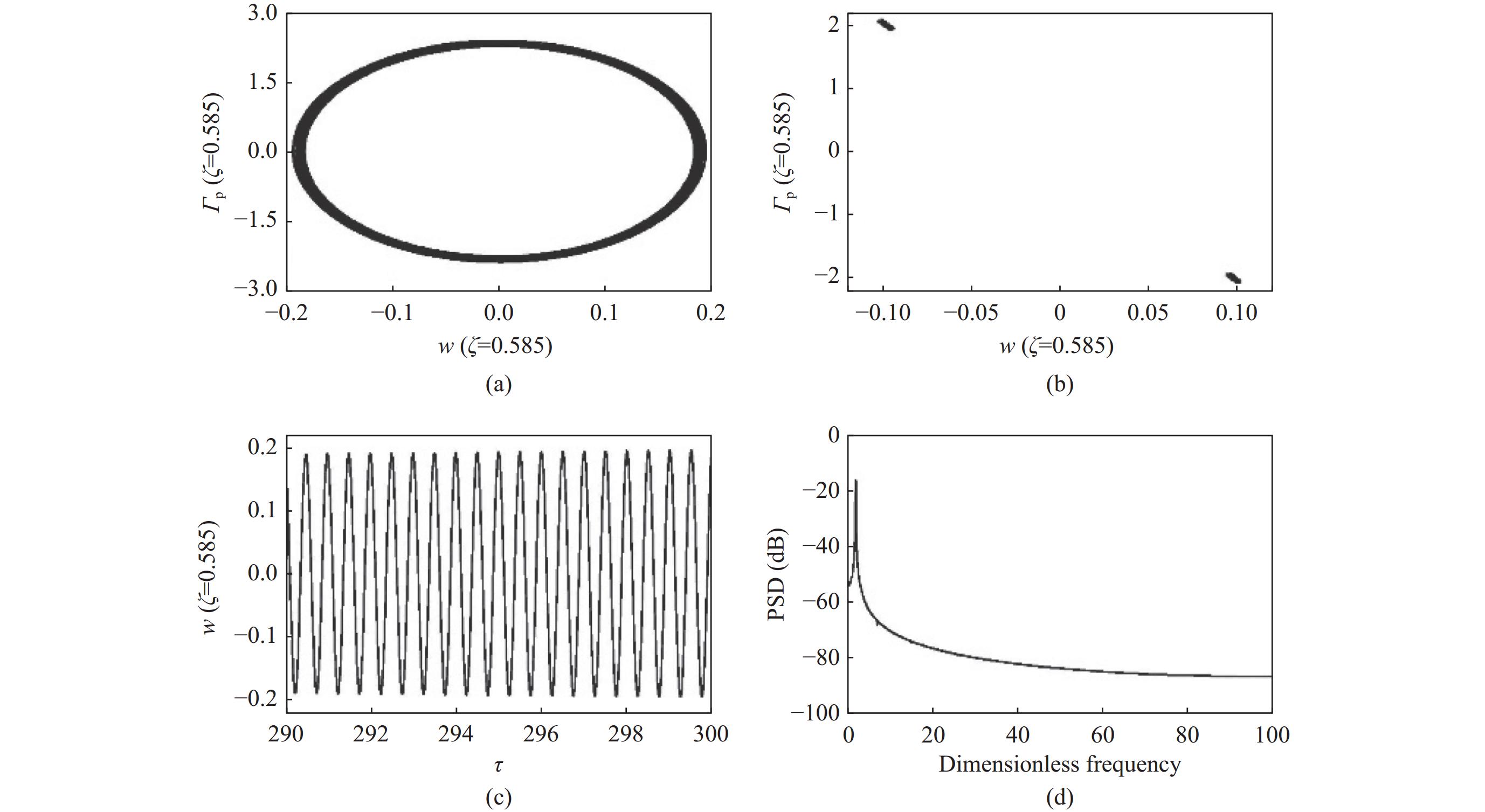
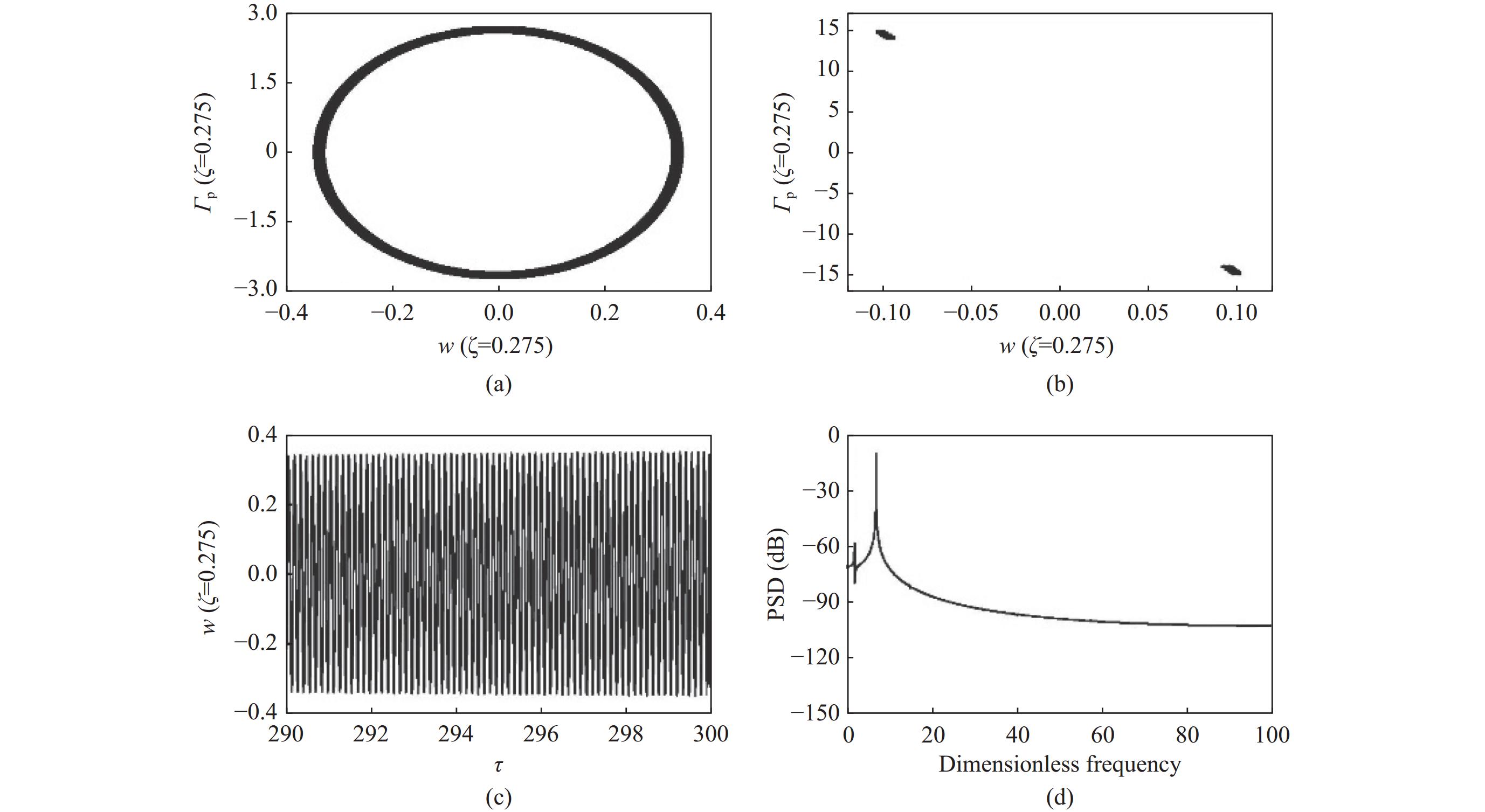
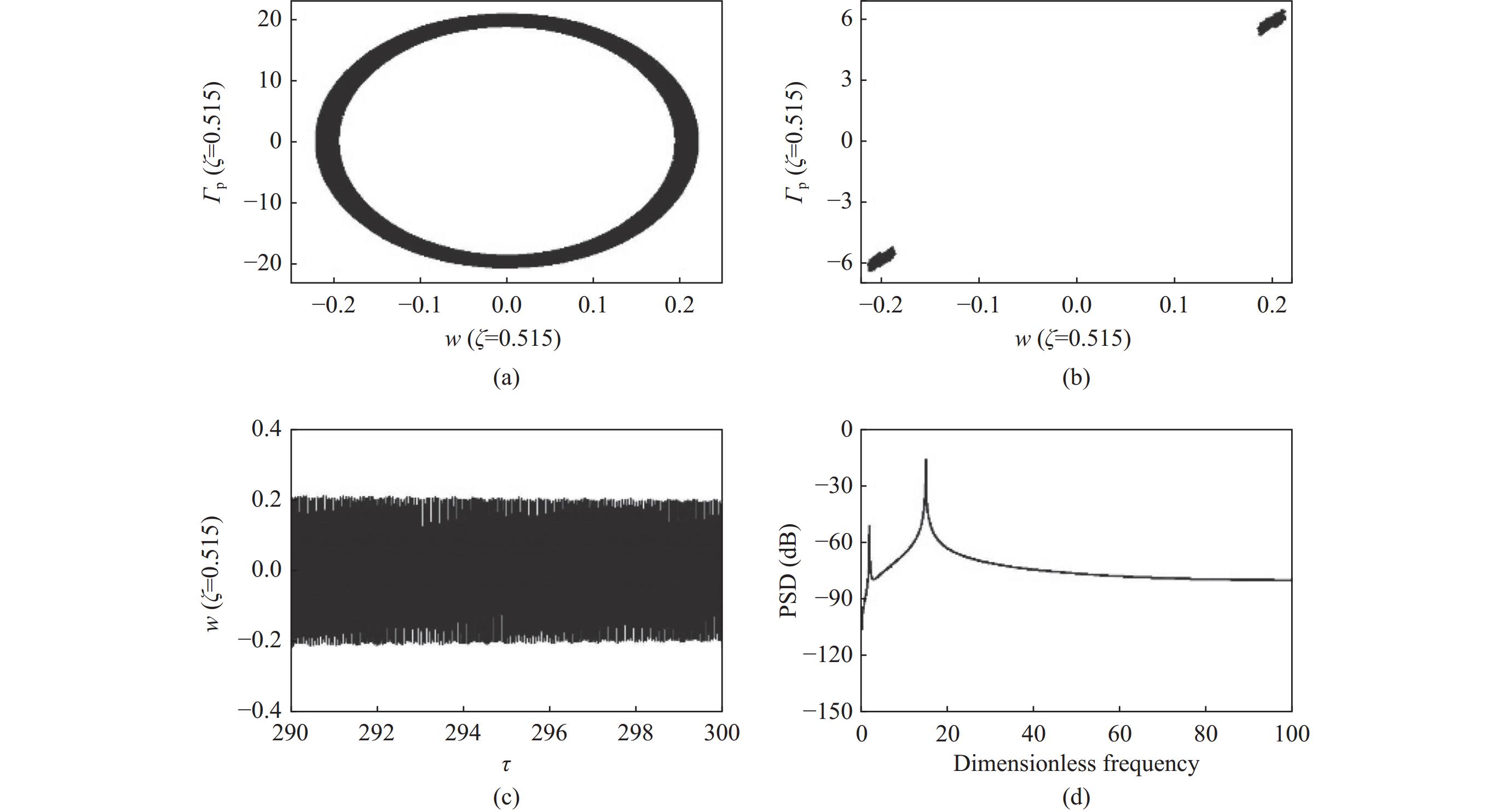
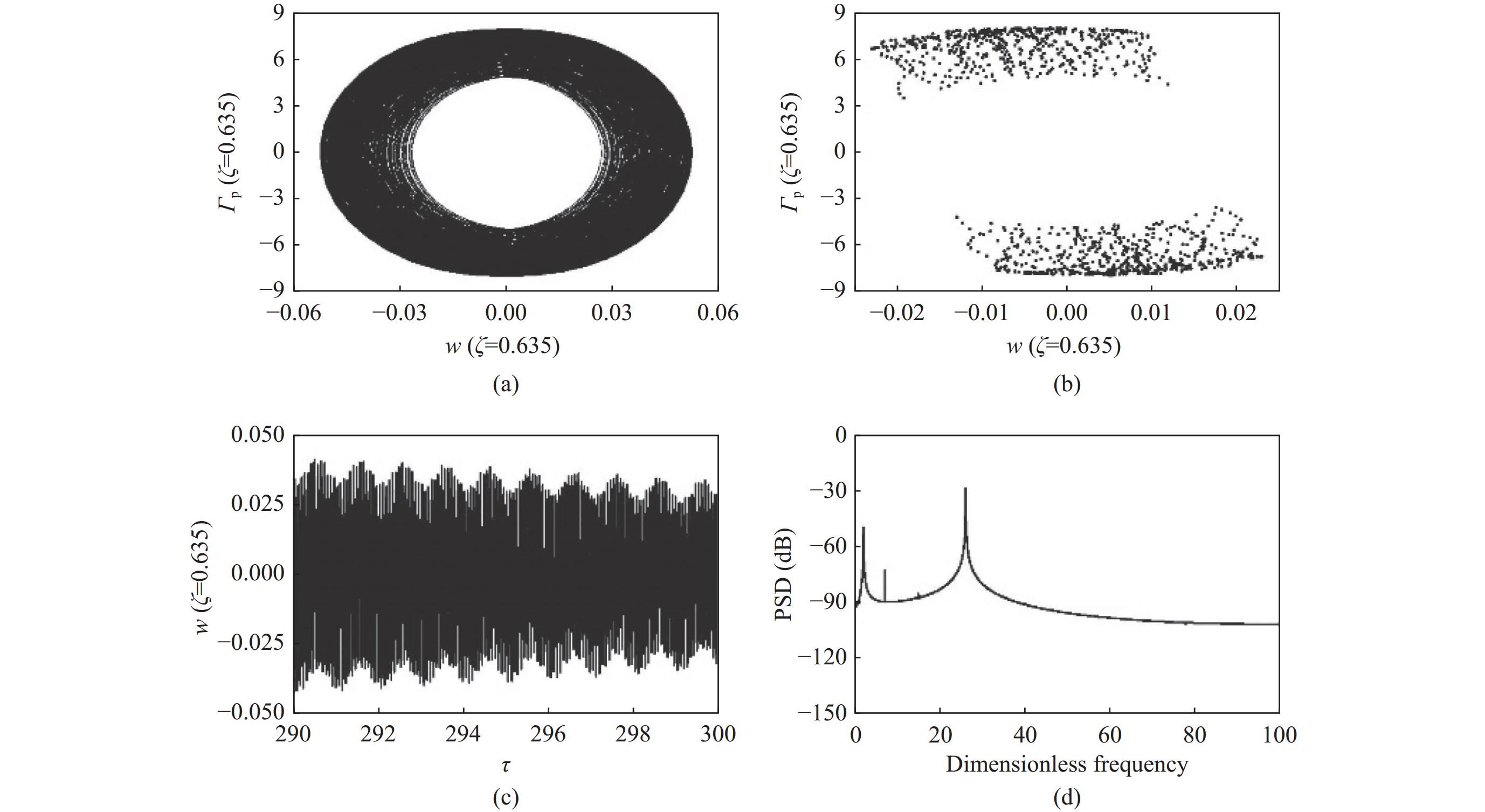
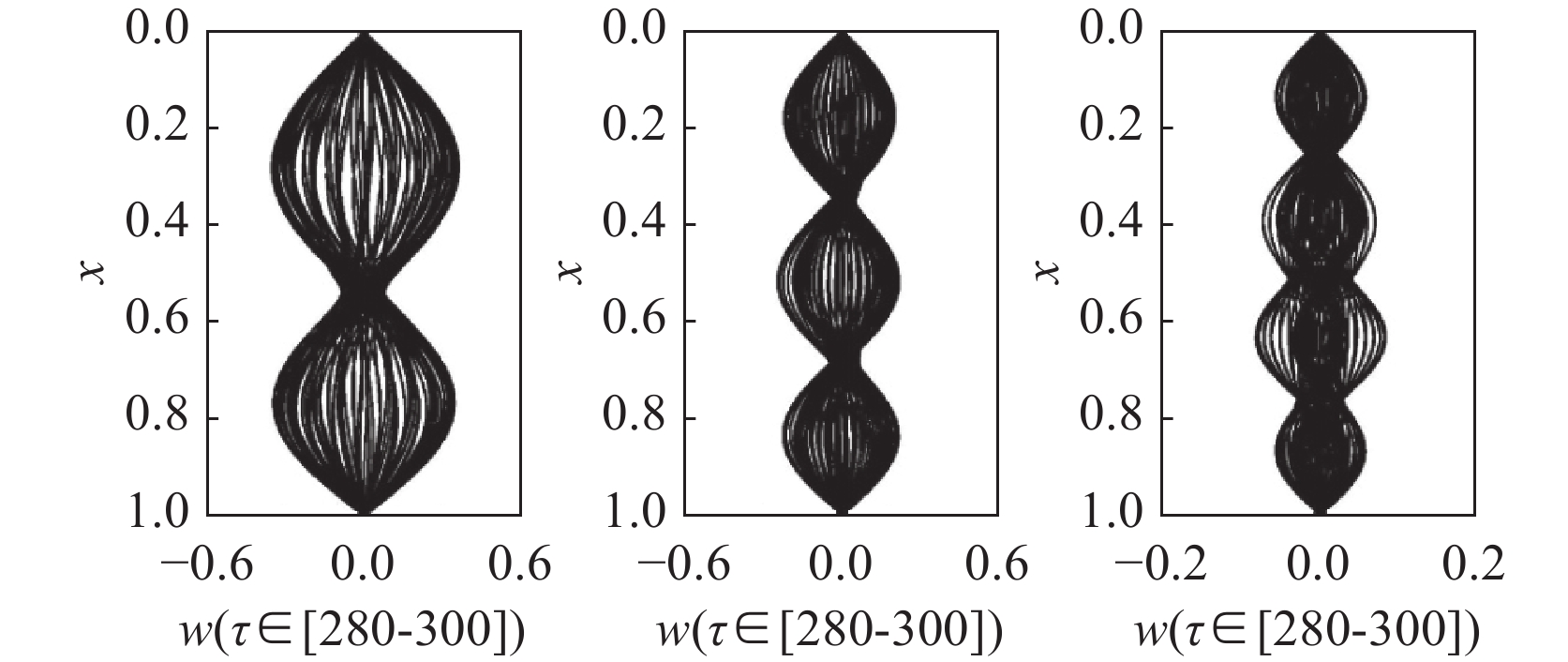
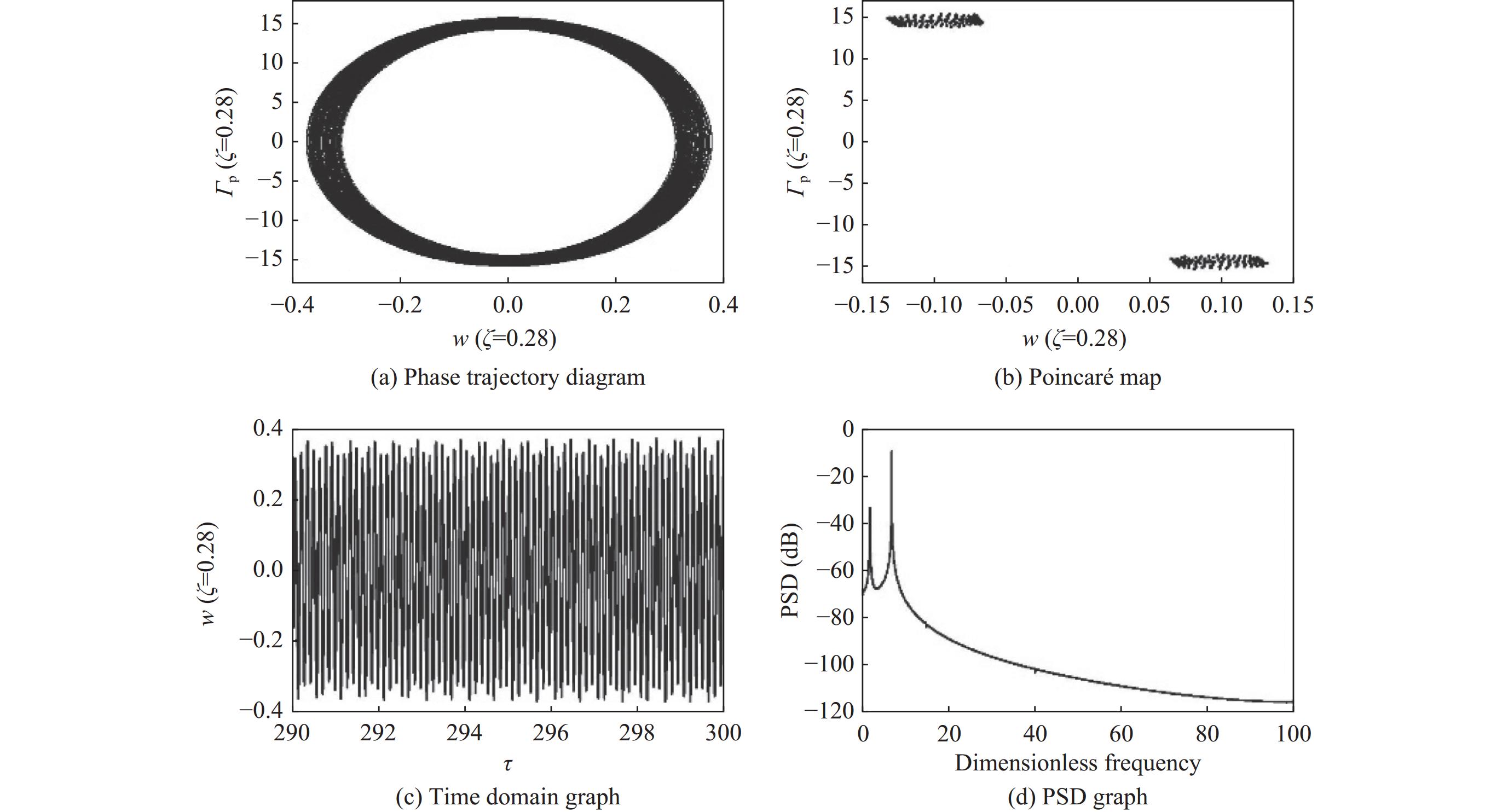
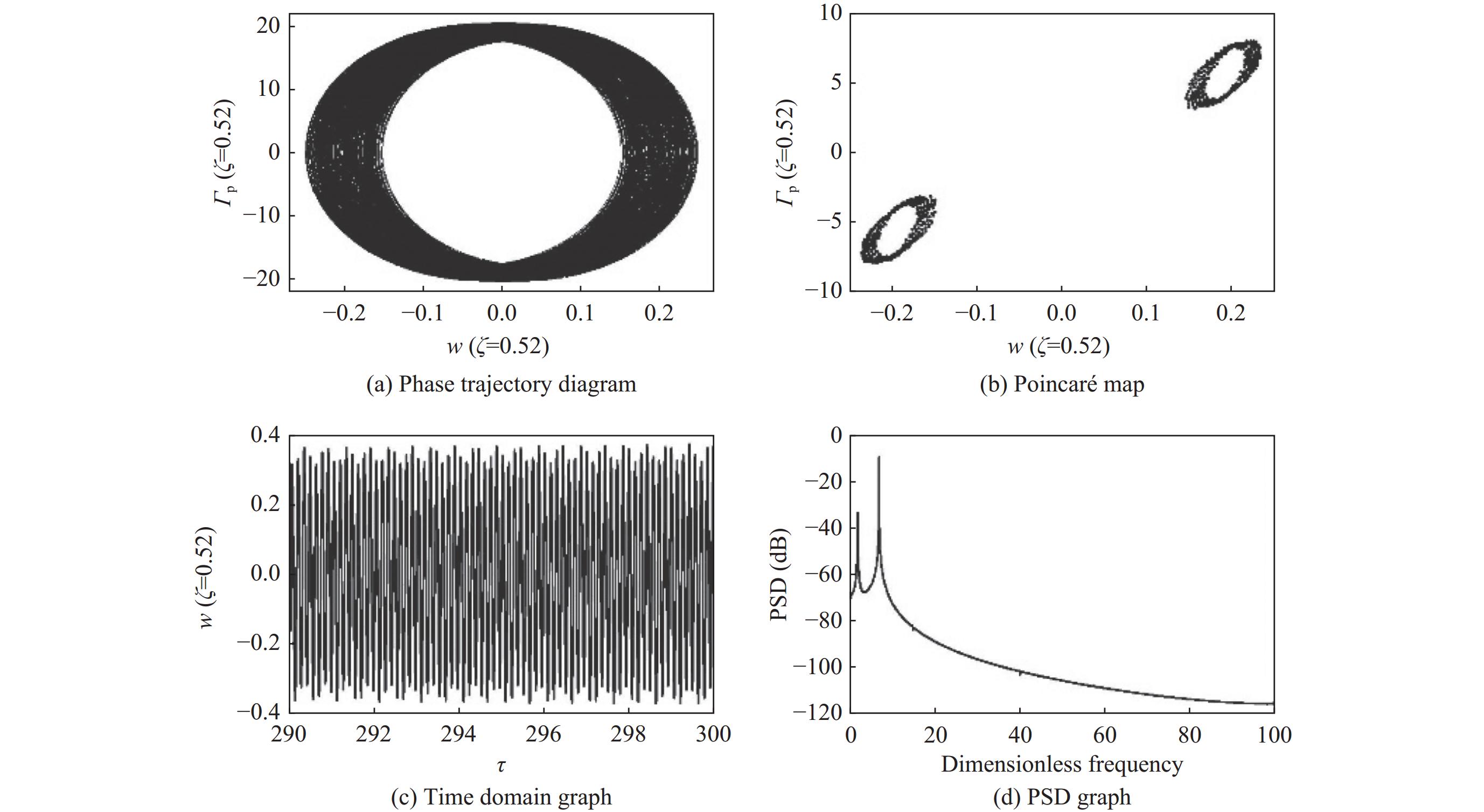
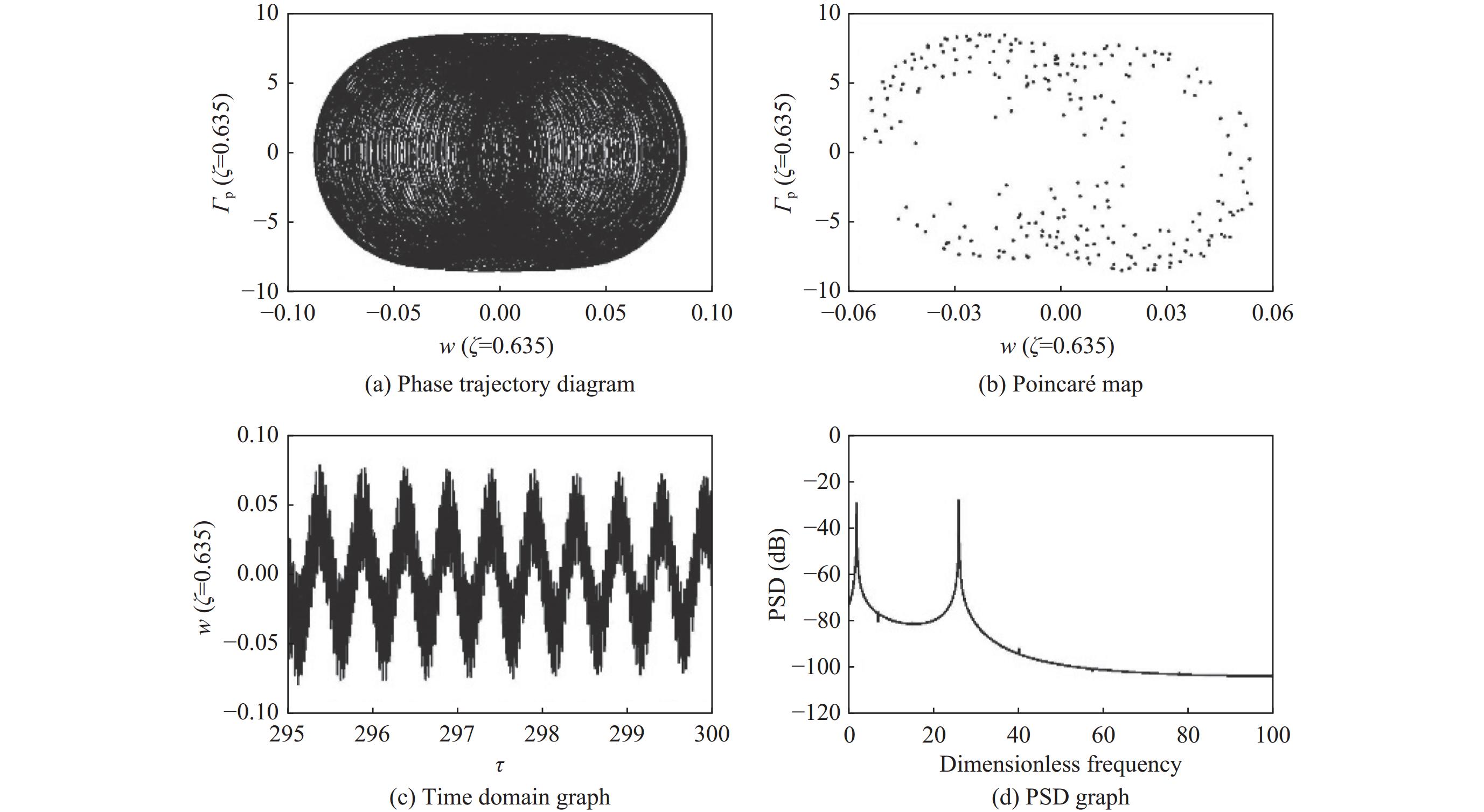
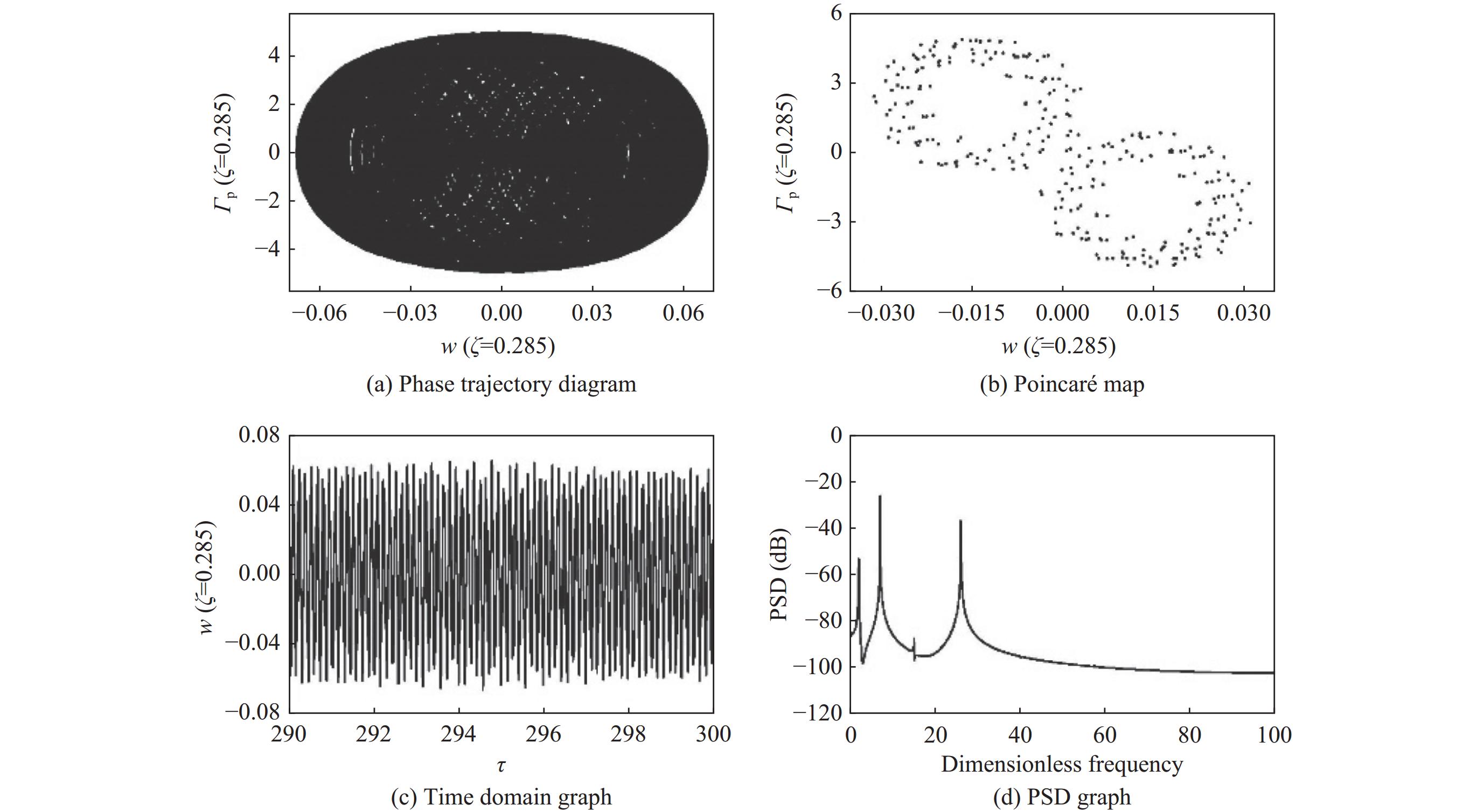
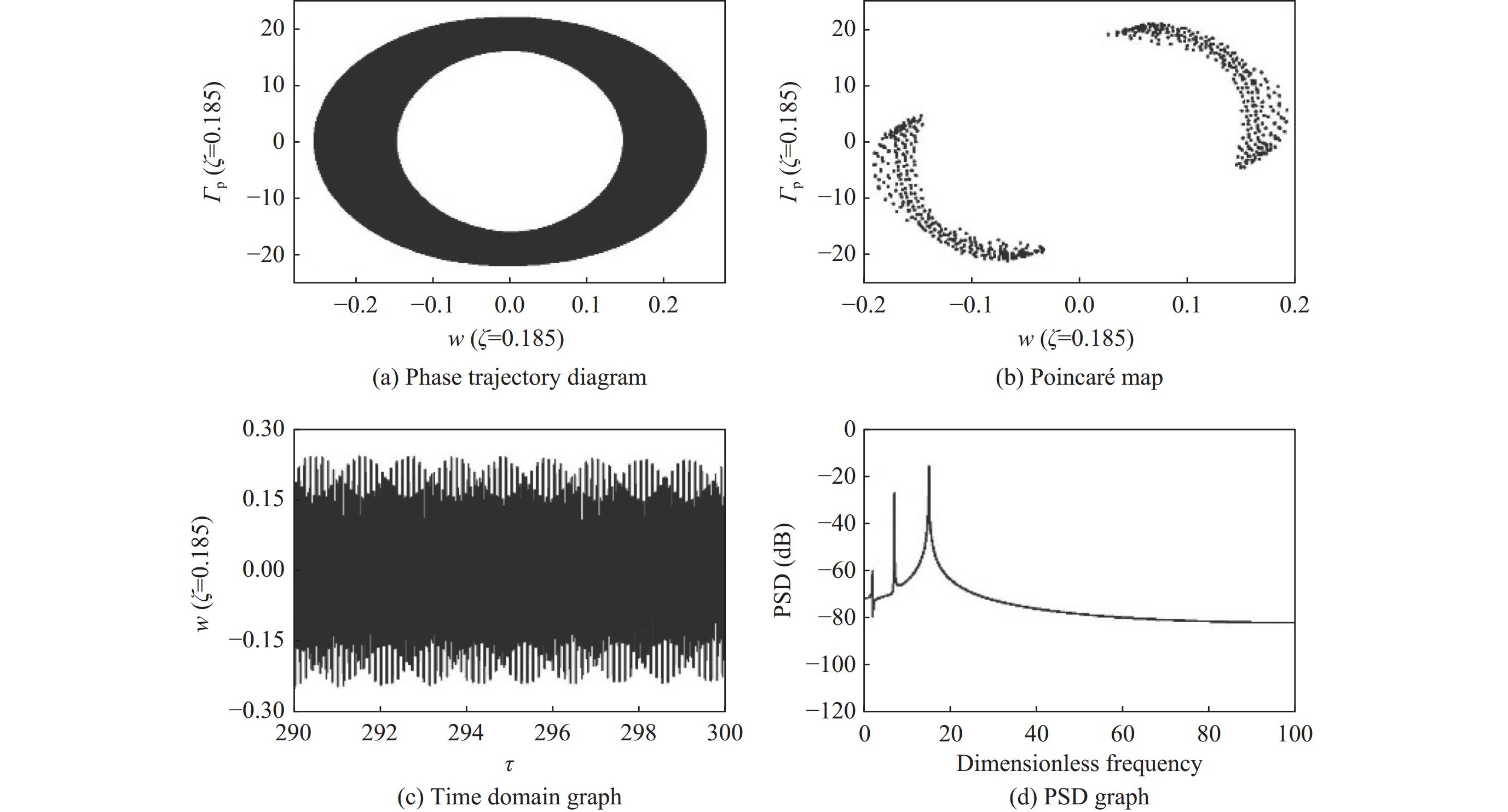
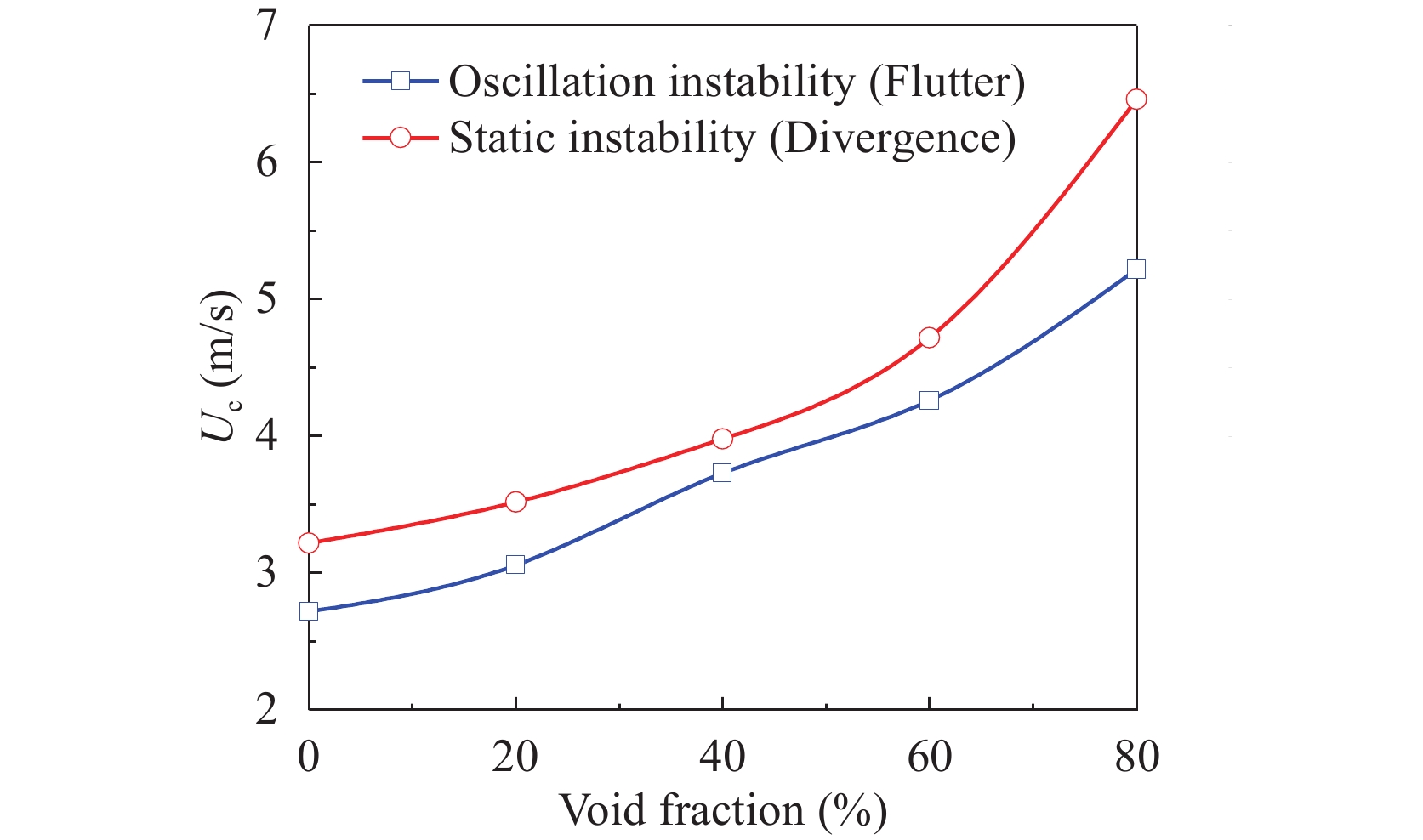
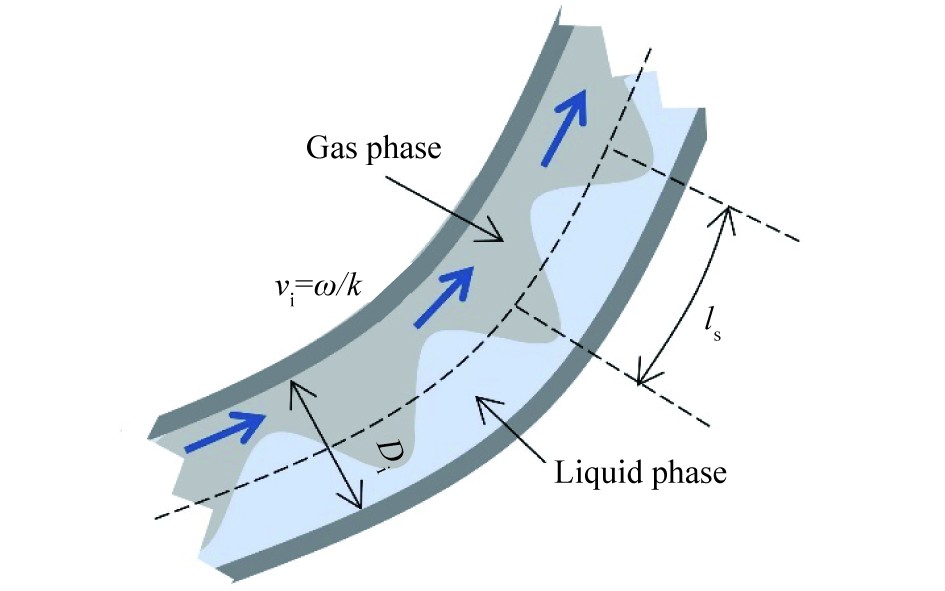
This work investigated the dynamic behavior of vertical pipes conveying gas-liquid two-phase flow when subjected to external excitations at both ends. Even with minimal excitation amplitude, resonance can occur when the excitation frequency aligns with the natural frequency of the pipe, significantly increasing the degree of operational risk. The governing equation of motion based on the Euler-Bernoulli beam is derived for the relative deflection with stationary simply supported ends, with the effects of the external excitations represented by source terms distributed along the pipe length. The fourth-order partial differential equation is solved via the generalized integral transform technique (GITT), with the solution successfully verified via comparison with results in the literature. A comprehensive analysis of the vibration phenomena and changes in the motion state of the pipe is conducted for three classes of external excitation conditions: same frequency and amplitude (SFSA), same frequency but different amplitudes (SFDA), and different frequencies and amplitudes (DFDA). The numerical results show that with increasing gas volume fraction, the position corresponding to the maximum vibration displacement shifts upward. Compared with conditions without external excitation, the vibration displacement of the pipe conveying two-phase flow under external excitation increases significantly. The frequency of external excitation has a significant effect on the dynamic behavior of a pipe conveying two-phase flow.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 839 -854
doi: 10.1007/s13344-025-0065-y
[Abstract](0)
Abstract:
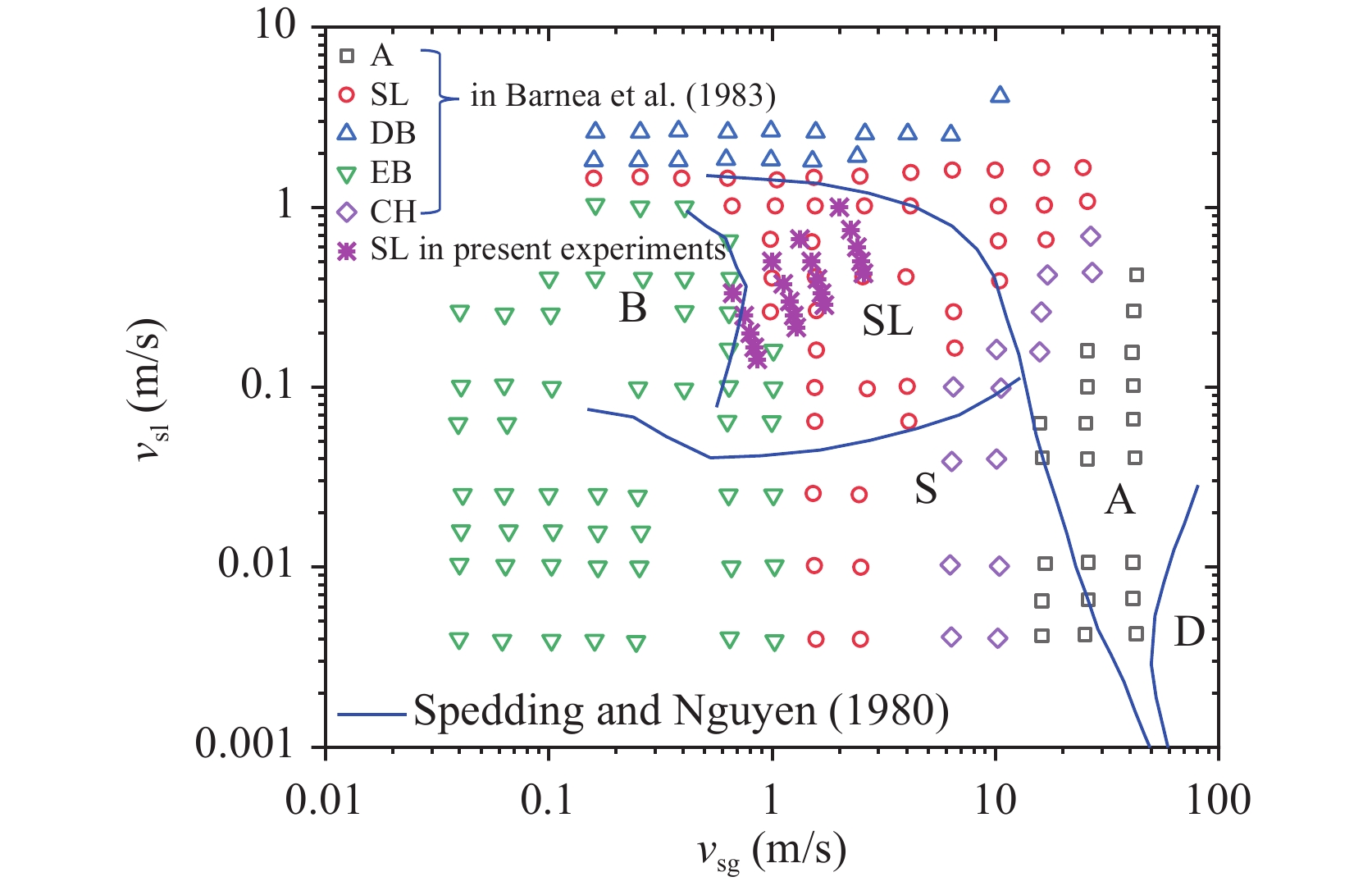
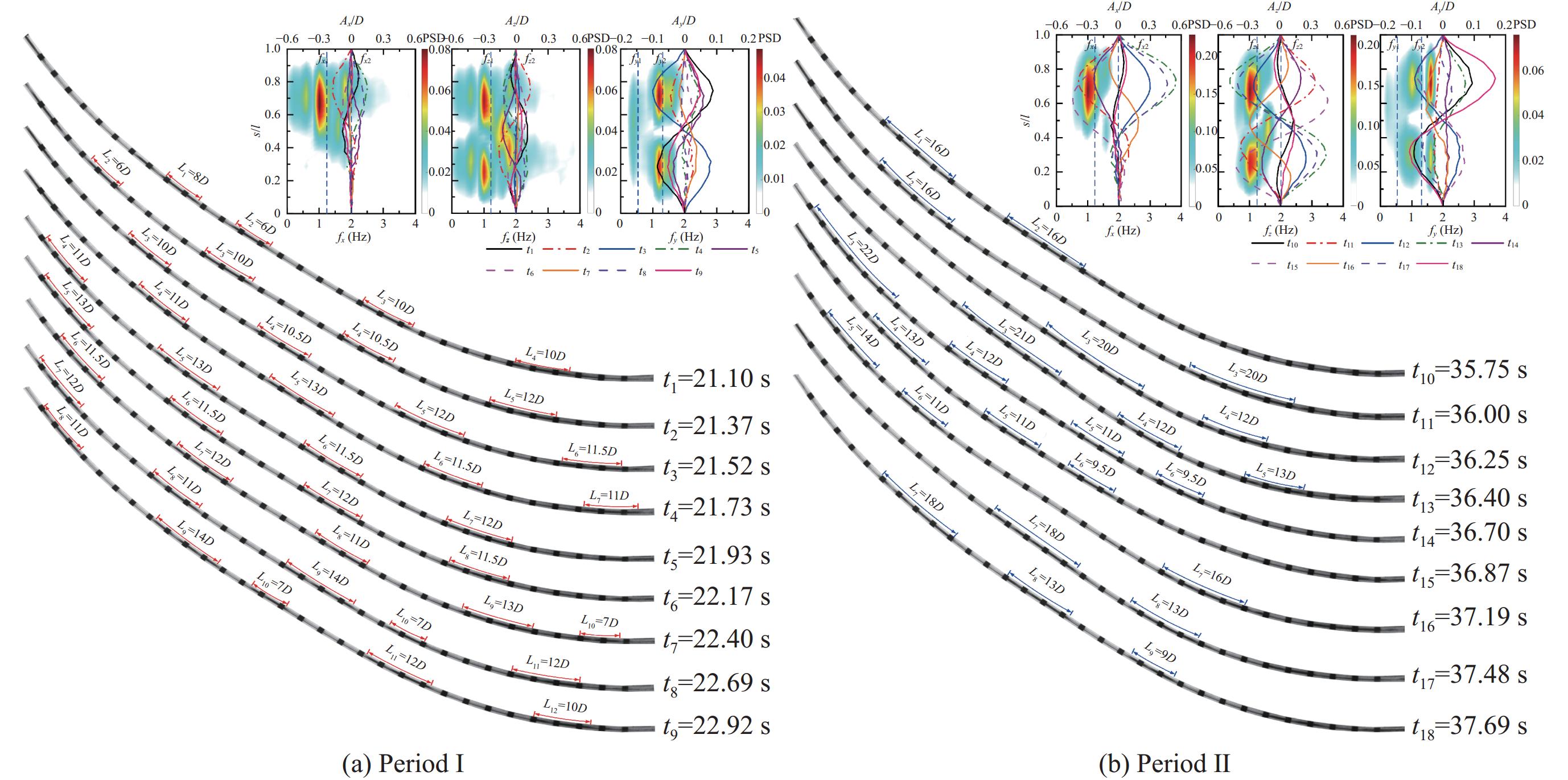
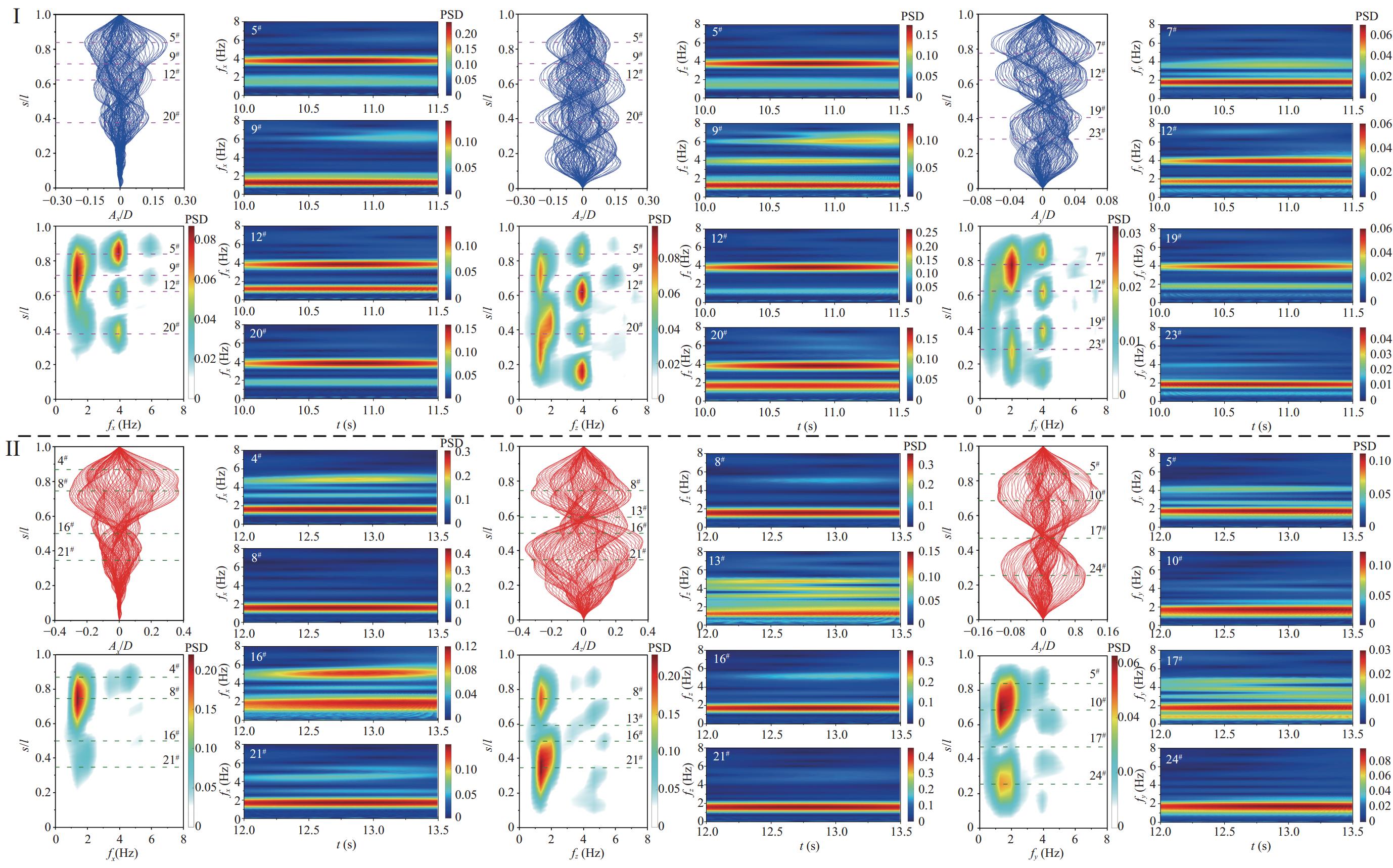
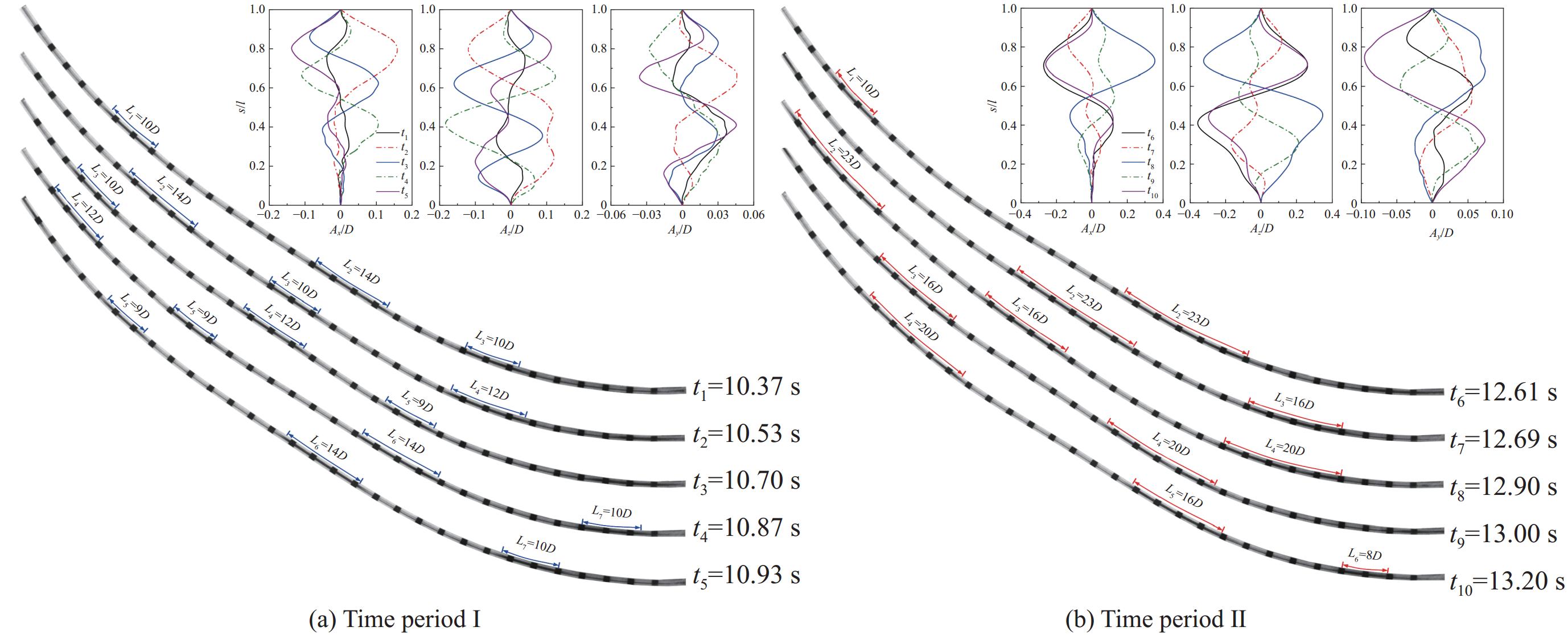
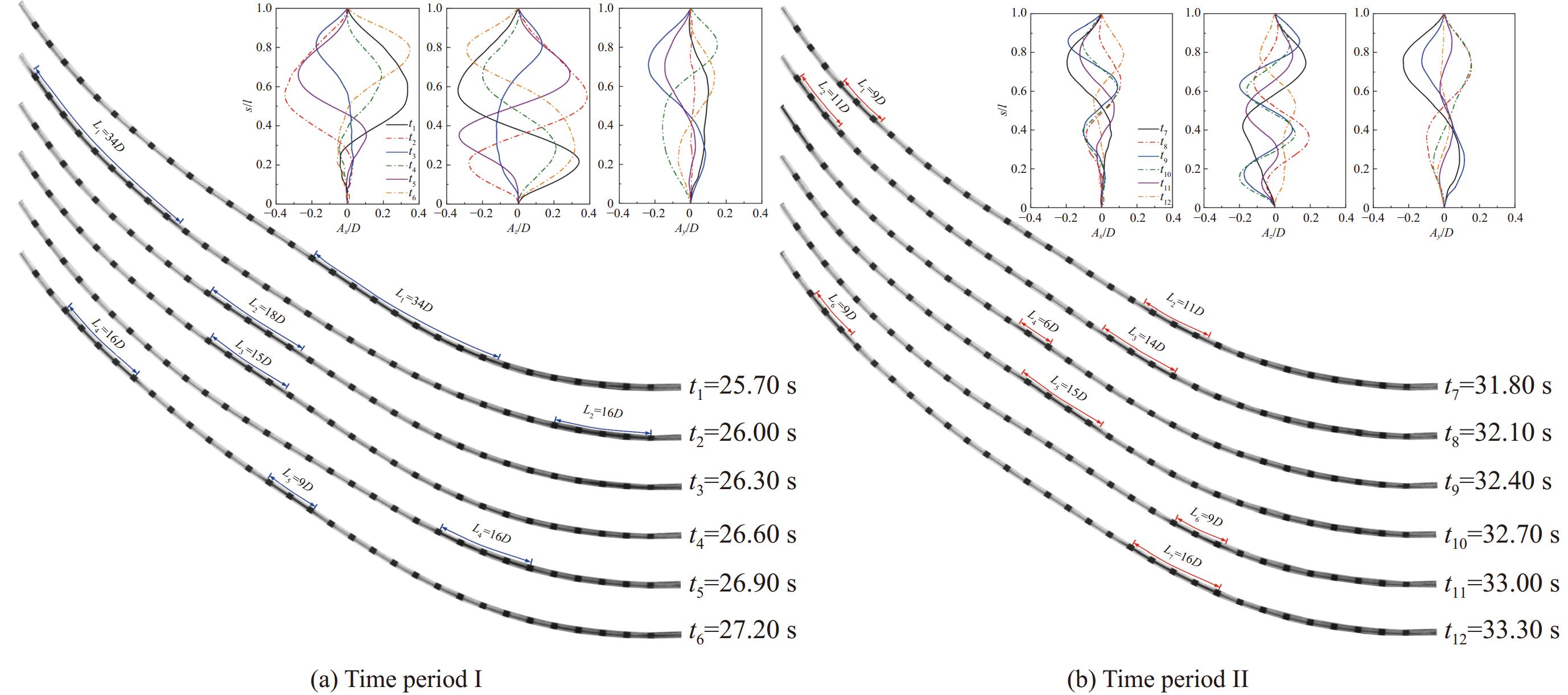
An experimental analysis of the slug-induced vibration (SIV) of a flexible catenary riser with an aspect ratio of 130 is reported in this work. The vibration responses and internal slug flow details at different gas-liquid ratios (Qg/Ql) and mixture velocities (vm) are non-intrusively and simultaneously captured by high-speed cameras. Both the in-plane and out-of-plane responses of the catenary riser are excited in all considered cases. The slug flow characteristics, including translational velocities, slug lengths, recurrence frequencies, and pressure variations, are analyzed and discussed, as are the dynamic responses of the riser in terms of the amplitudes, space-varying frequency, and modal weight. The dominant modal response based on the root-mean-square amplitude profiles does not match that based on the dominant frequency. Three mode switching types are identified based on the RMS amplitude profiles and the dominant frequency. When vm is small, no mode switching (NMS) is observed in either the in-plane or out-of-plane responses. For mode switching I (MS I), the switching between the first and second modes in the in-plane response is induced by slug flow with different recurrence frequencies in cases of large Qg/Ql. However, there is no mode switching in the out-of-plane response. The switching between the first and third modes for the in-plane response and the second and fourth modes for the out-of-plane response (MS II) occurs in cases of relatively high vm and low Qg/Ql.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 855 -865
doi: 10.1007/s13344-025-0066-x
[Abstract](0)
Abstract:
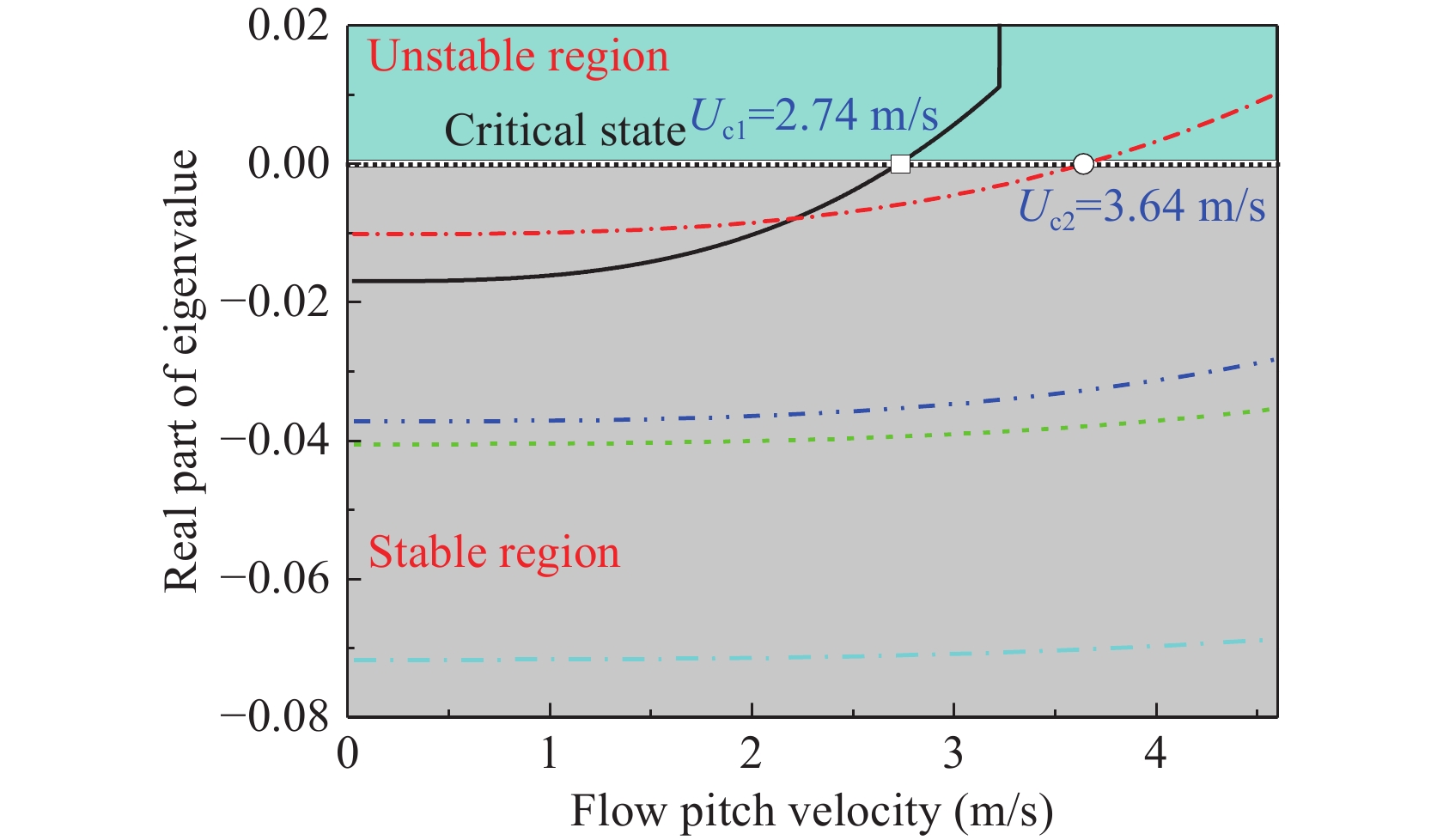
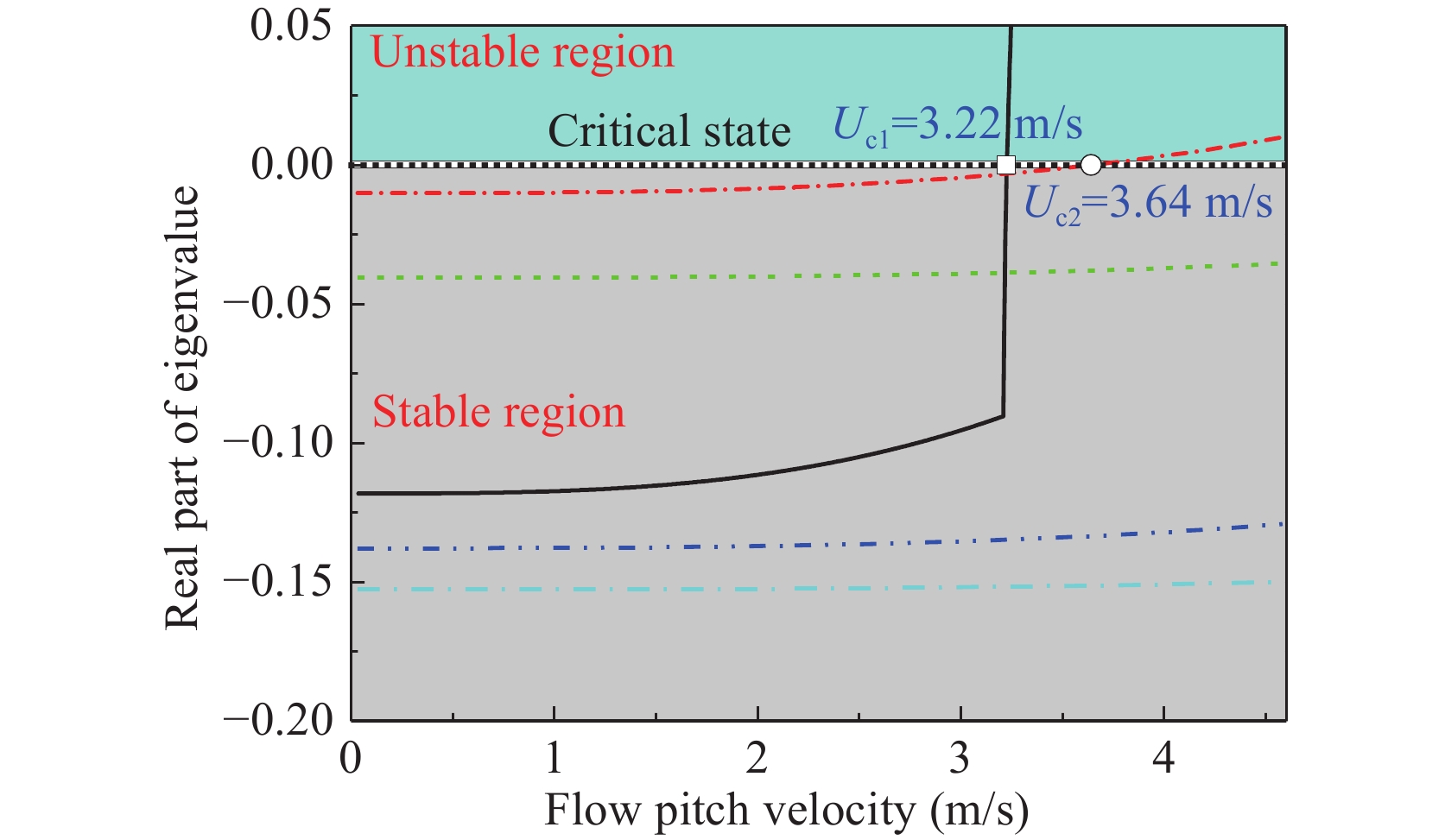
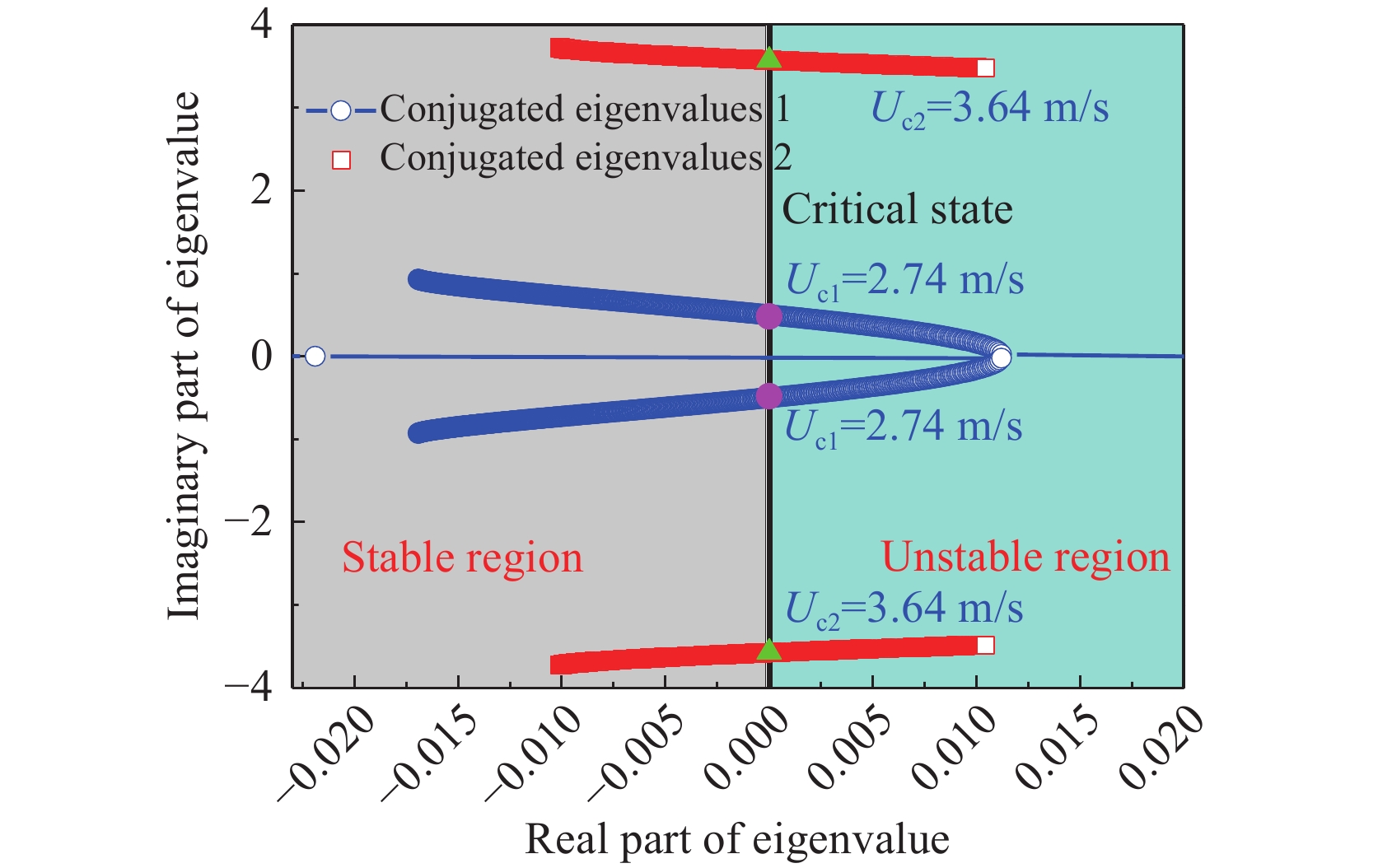
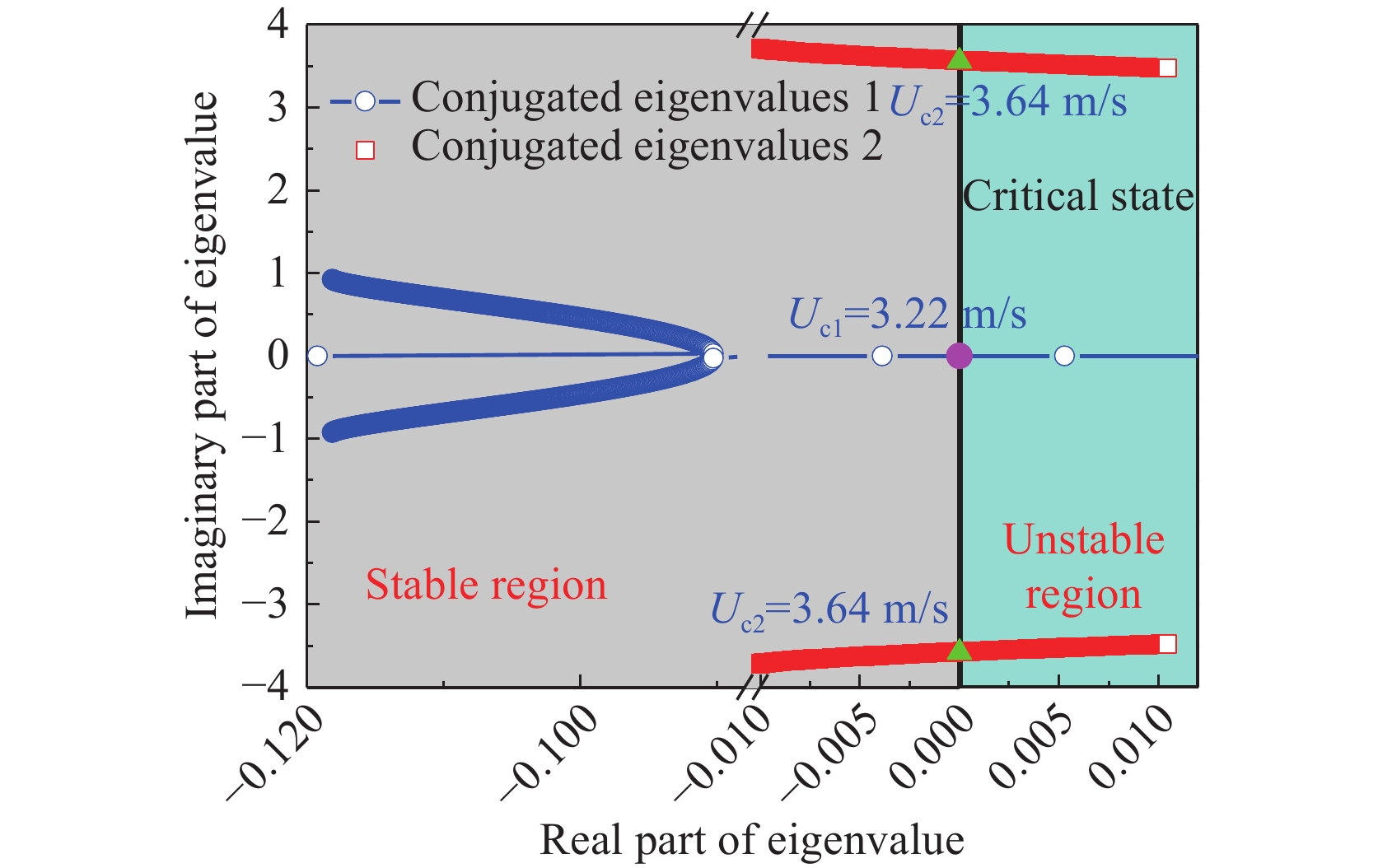
The influence of the squeeze film between the tube and the support structure on flow-induced vibrations is a critical factor in tube bundles subjected to two-phase cross-flow. This aspect can significantly alter the threshold for fluidelastic instability and affect heat transfer efficiency. This paper presents a mathematical model incorporating the squeeze film force between the tube and the support structure. We aim to clarify the mechanisms underlying fluidelastic instability in tube bundle systems exposed to two-phase flow. Using a self-developed computer program, we performed numerical calculations to examine the influence of the squeeze film on the threshold of fluidelastic instability in the tube bundle system. Furthermore, we analyzed how the thickness and length of the squeeze film affect both the underlying mechanisms and the critical velocity of fluidelastic instability.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 866 -877
doi: 10.1007/s13344-025-0067-9
[Abstract](0)
Abstract:
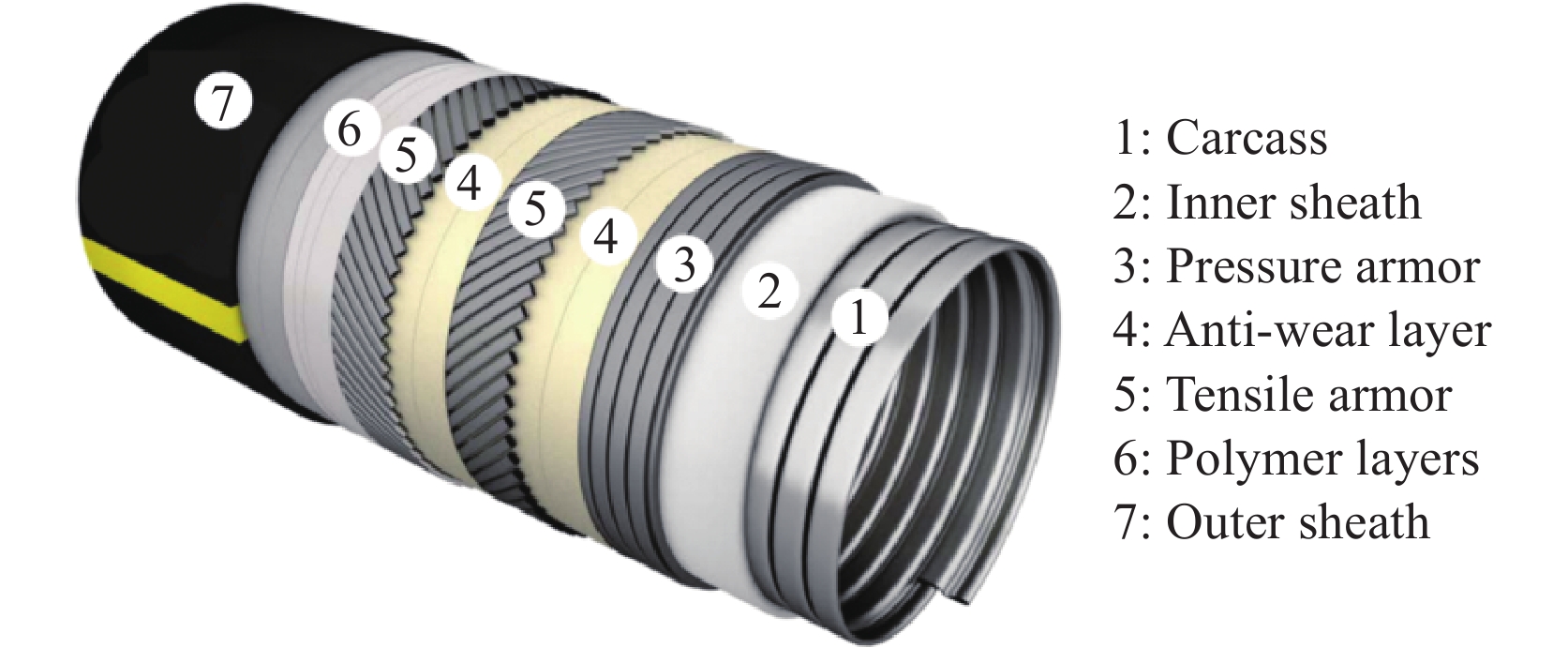
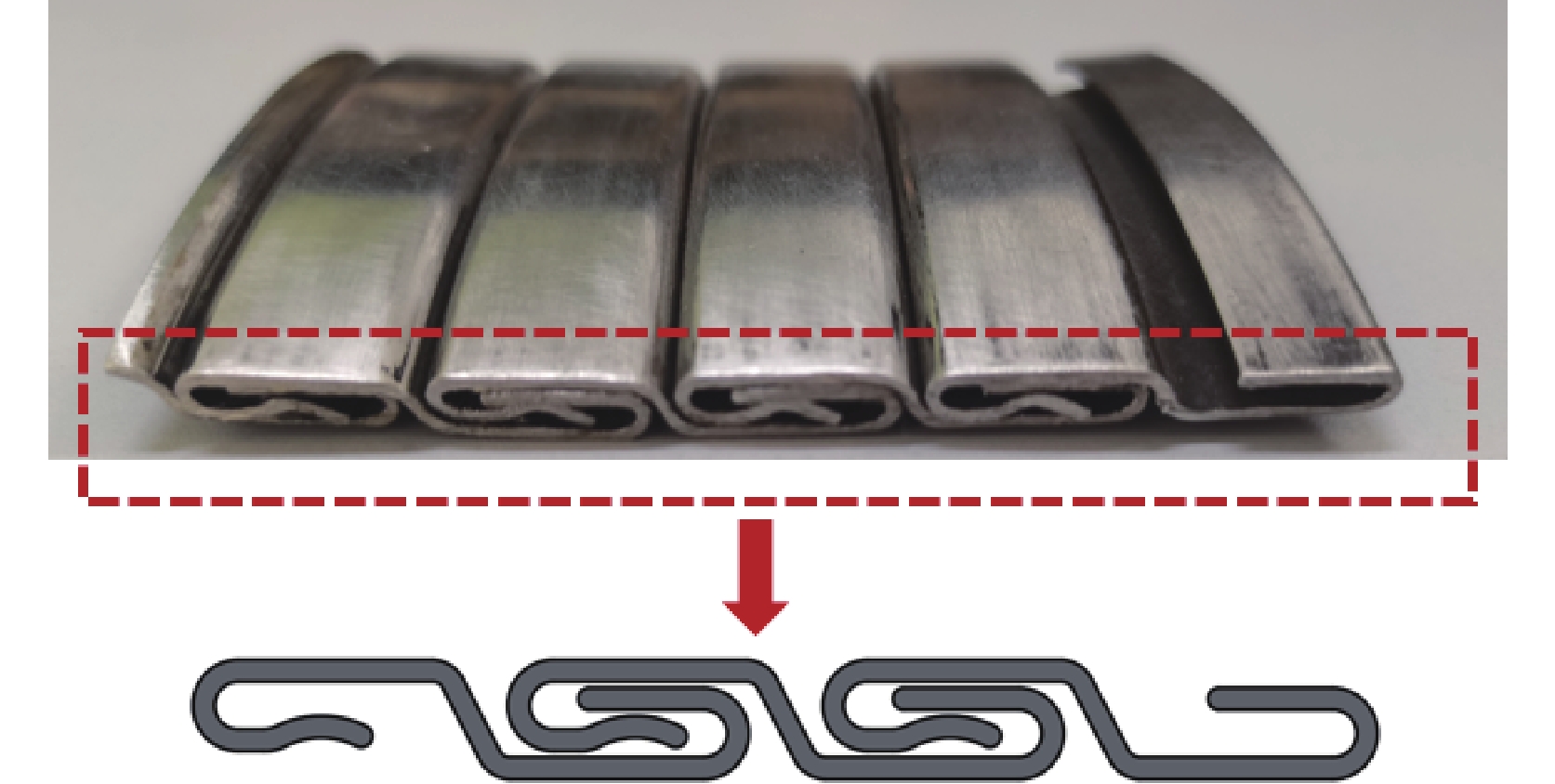
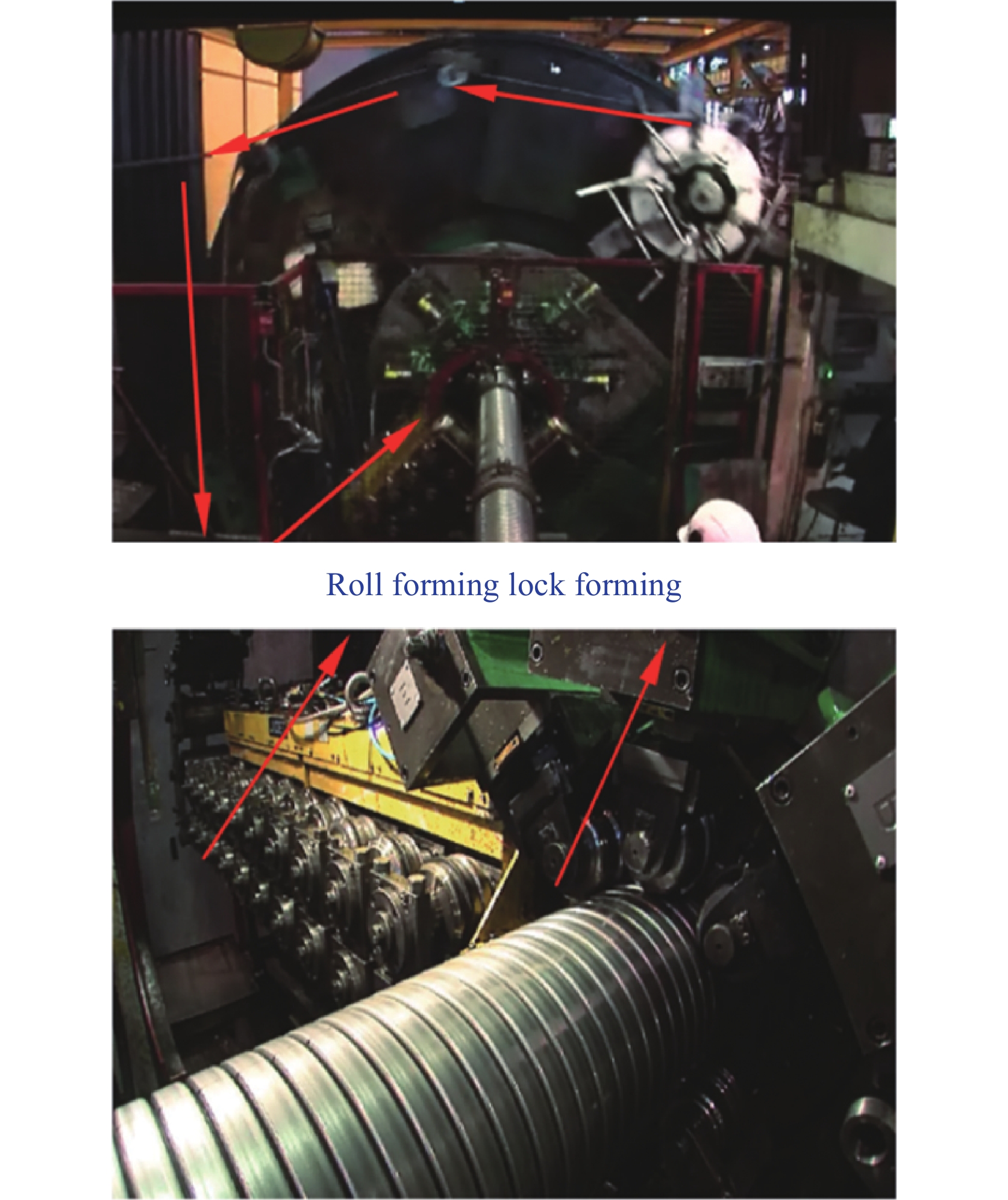
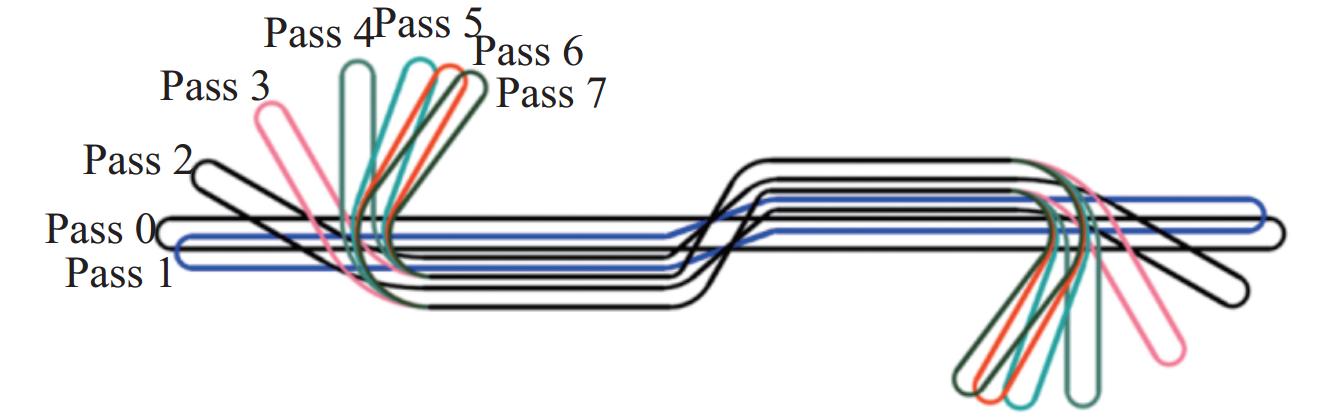
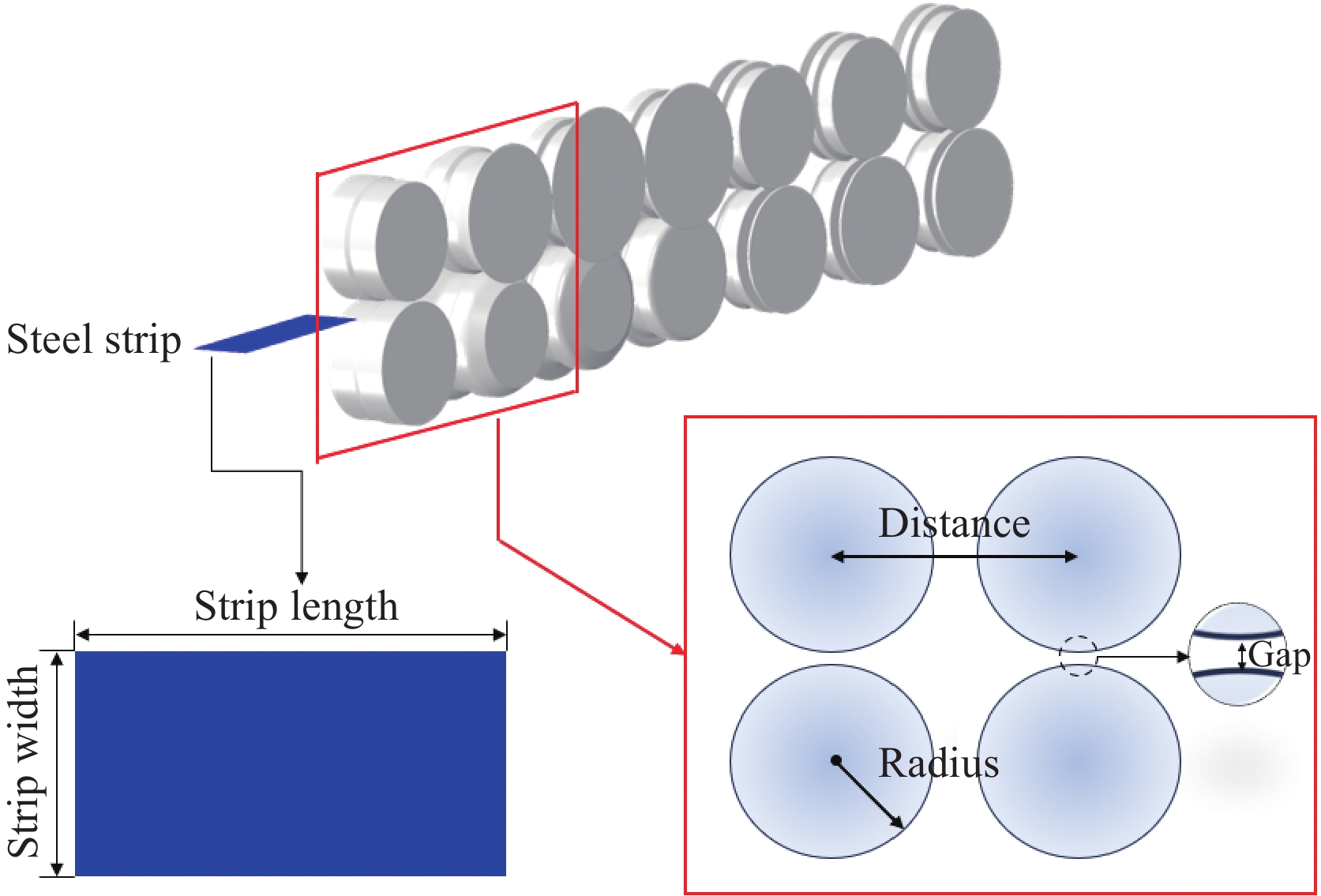
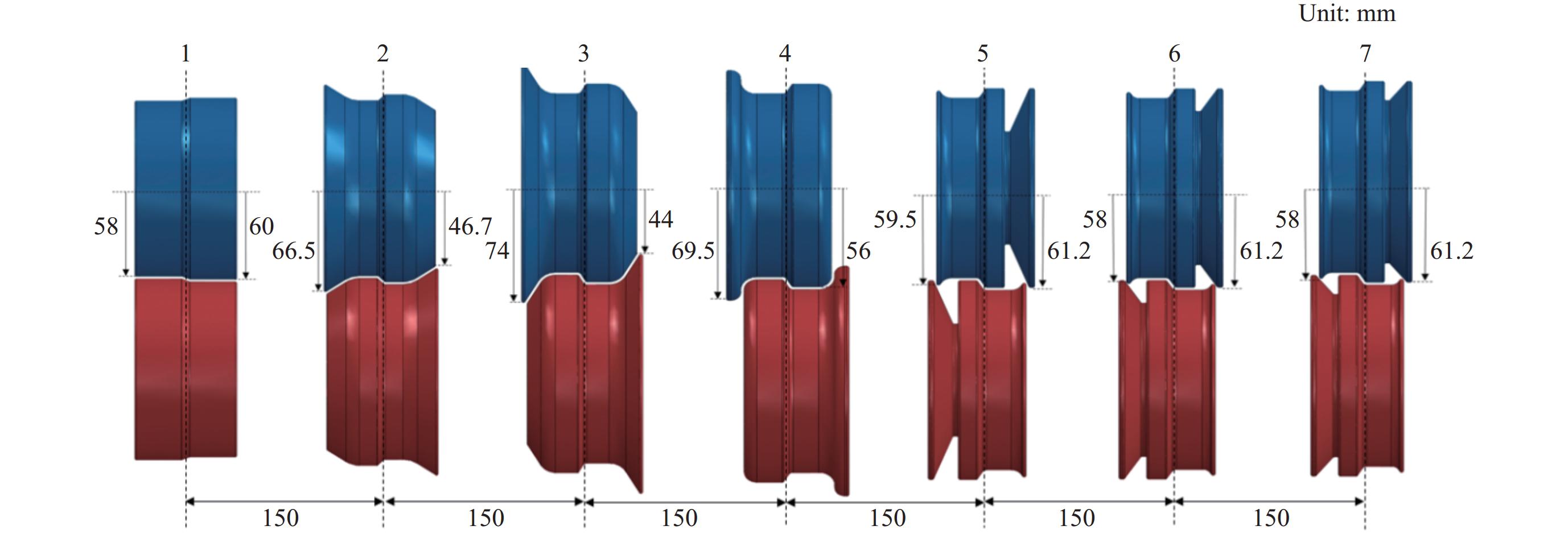
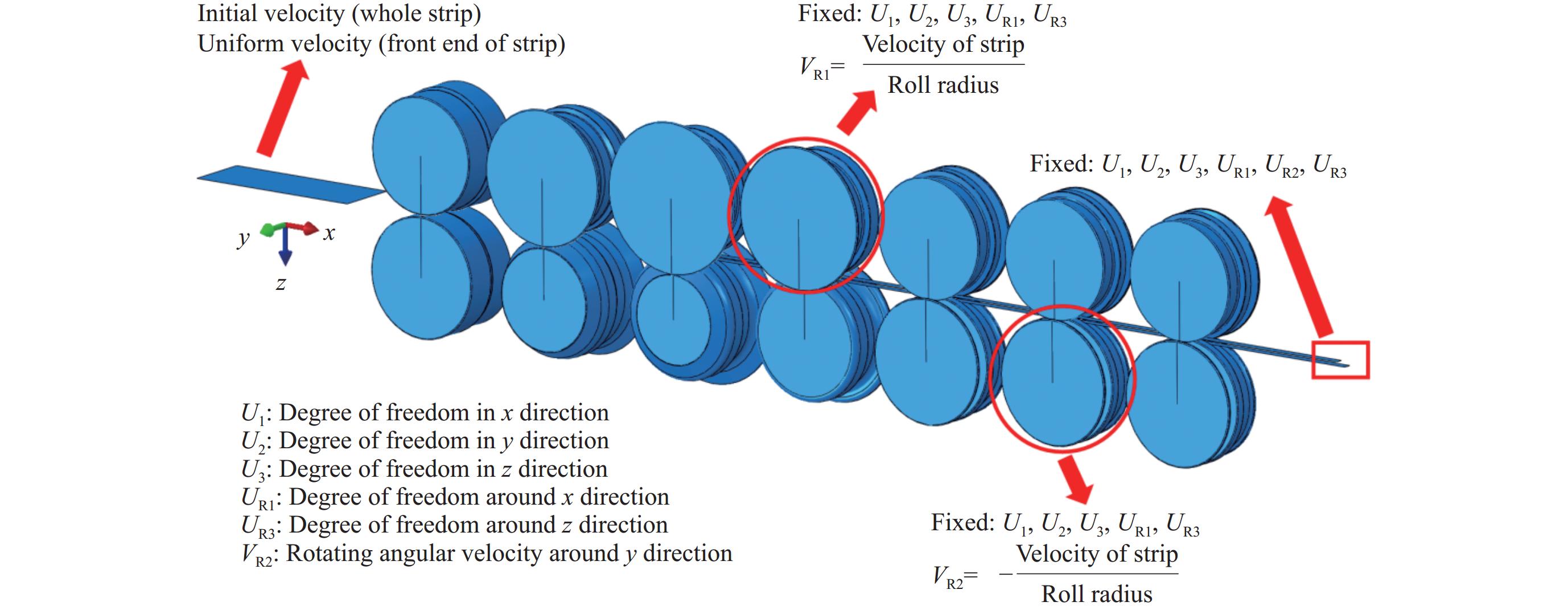
The carcass layer is the innermost structure of flexible marine risers and is responsible for resisting external pressure. It has an “S” section with a spiral interlocking feature. After the multi-pass roll forming of a flat steel strip, a carcass layer is formed by lock forming. During roll forming, the steel strip undergoes significant plastic deformation, and its local area accumulates residual stress owing to multiple loading and unloading cycles. These phenomena complicate the design and analysis of the carcass layer multi-pass roll forming (CLMRF) process and cause issues in the carcass layer during manufacturing, such as strip fracture and low forming quality. Thus, herein, CLMRF was investigated to clarify the stress distribution, and a parameter analysis was performed. First, the CLMRF process was designed on the basis of classical roll-forming design theory. Second, a finite element model was established, and CLMRF was simulated. Third, the distributions of the forming stress and residual stress of the strip during CLMRF were investigated. Finally, the influences of the strip thickness, roll gap, roll distance, and angular increment were investigated. The conclusions of this study can be used to provide technical guidance in the manufacturing of flexible risers.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 878 -890
doi: 10.1007/s13344-025-0068-8
[Abstract](0)
Abstract:
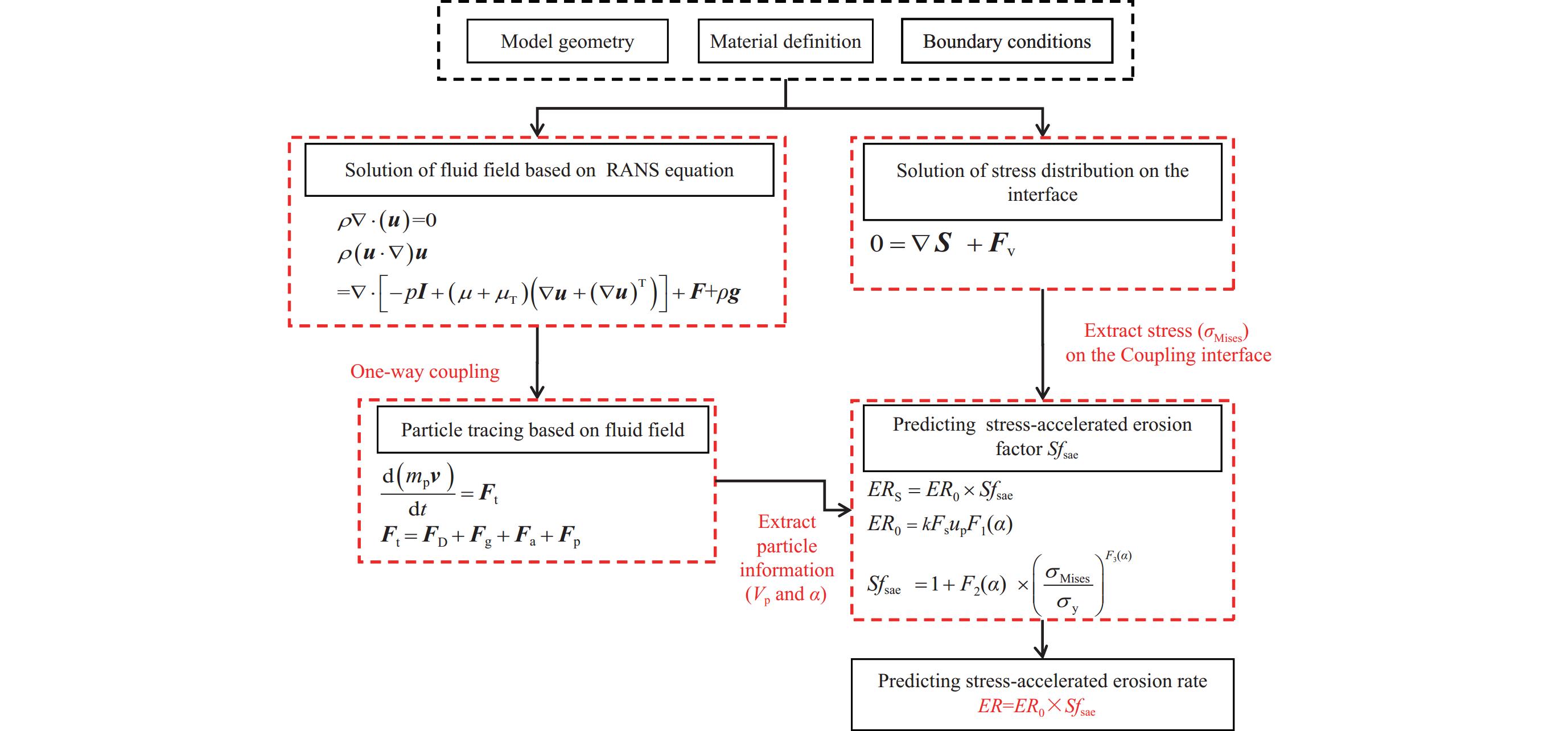
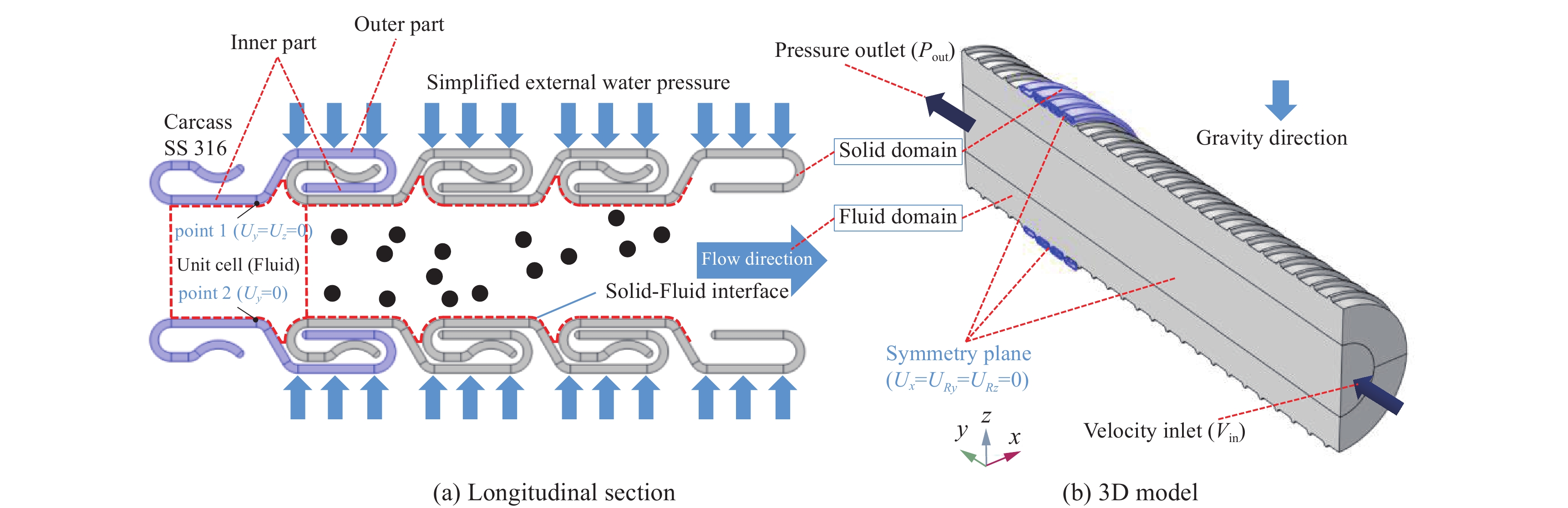
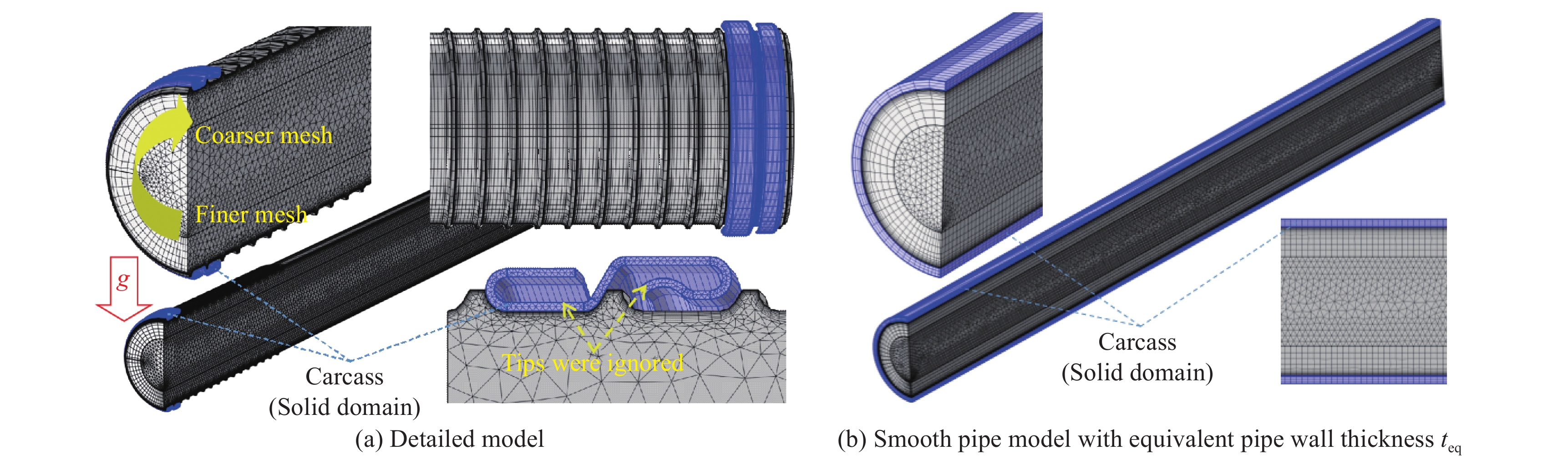
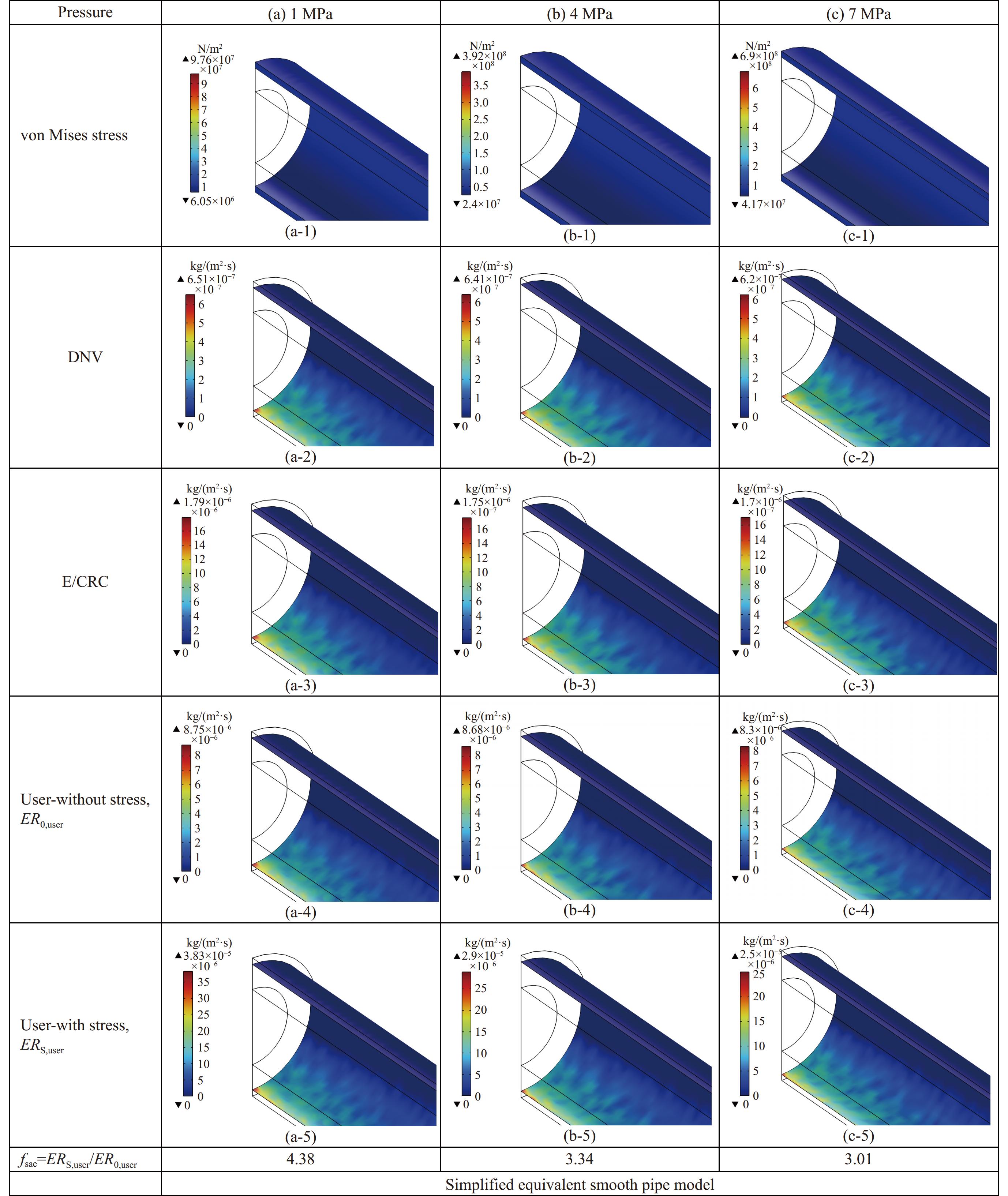
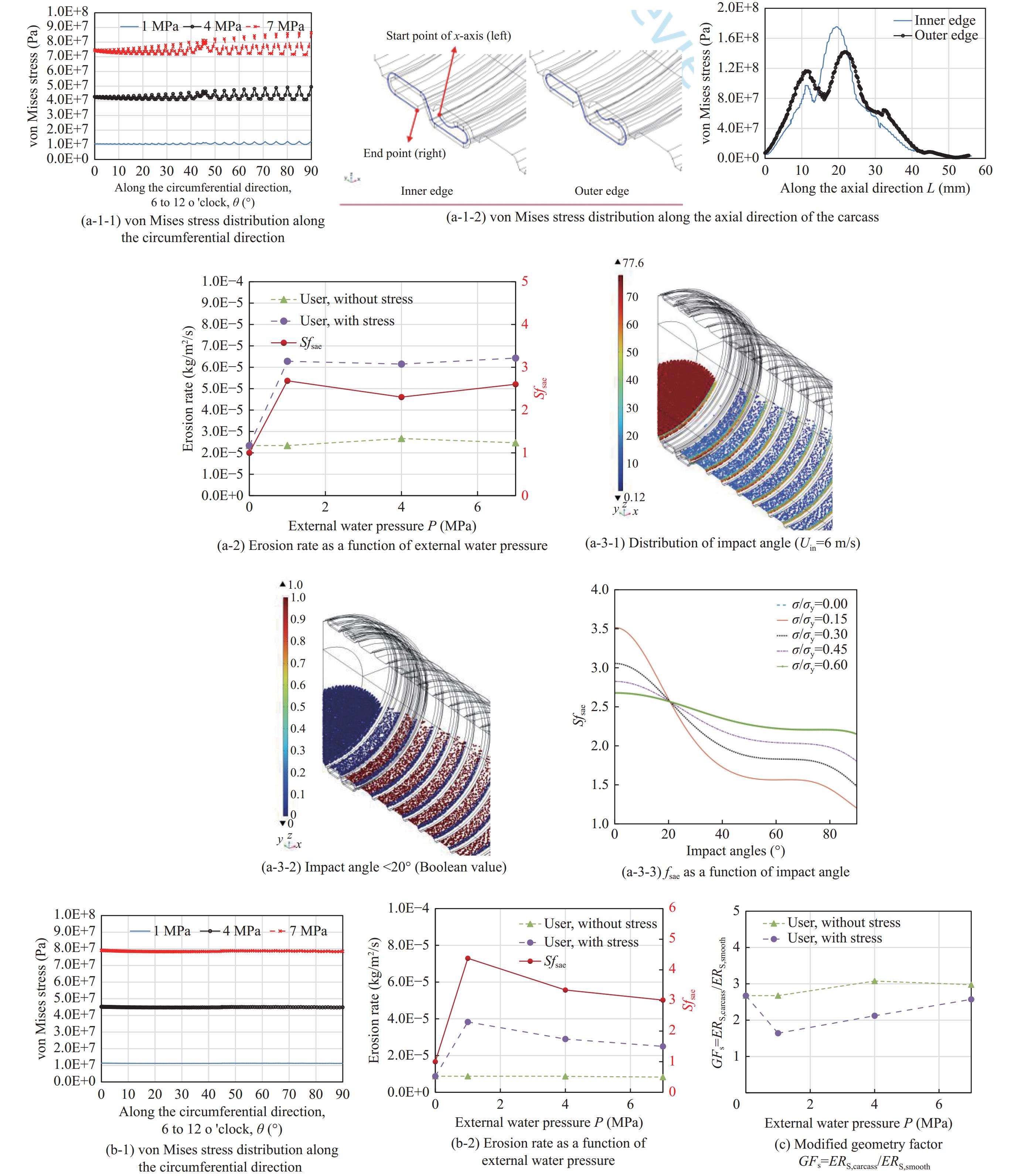
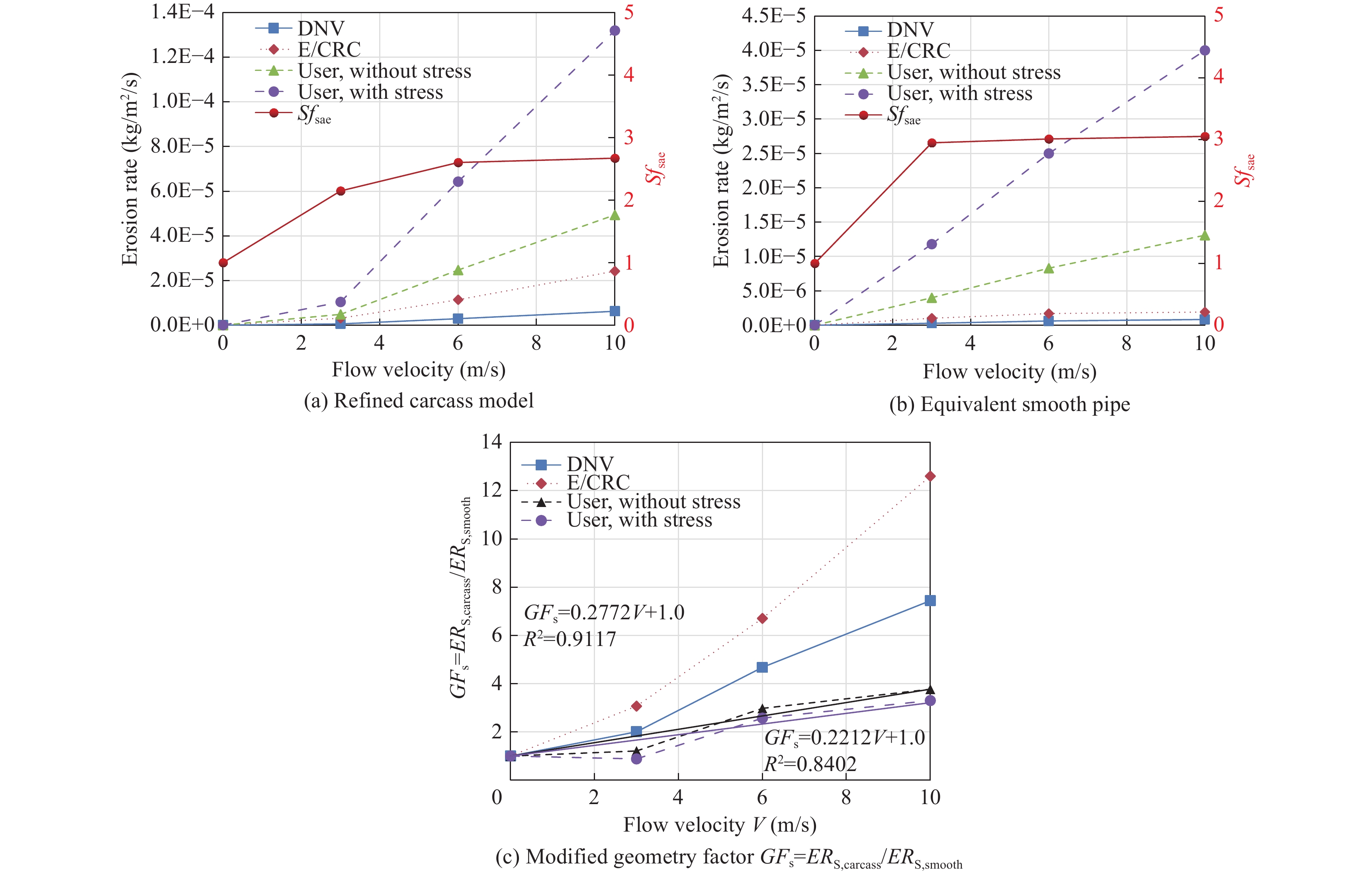
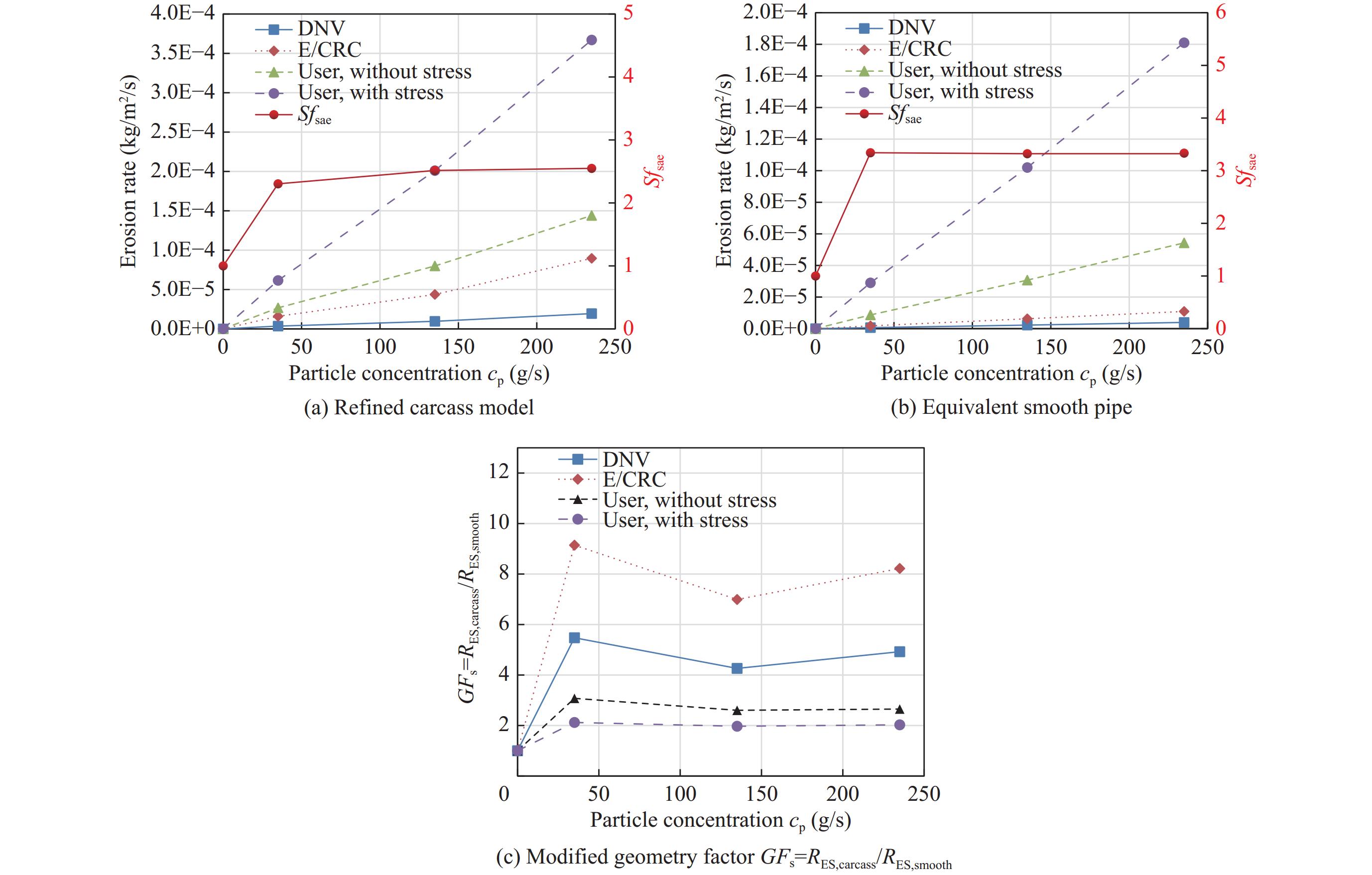
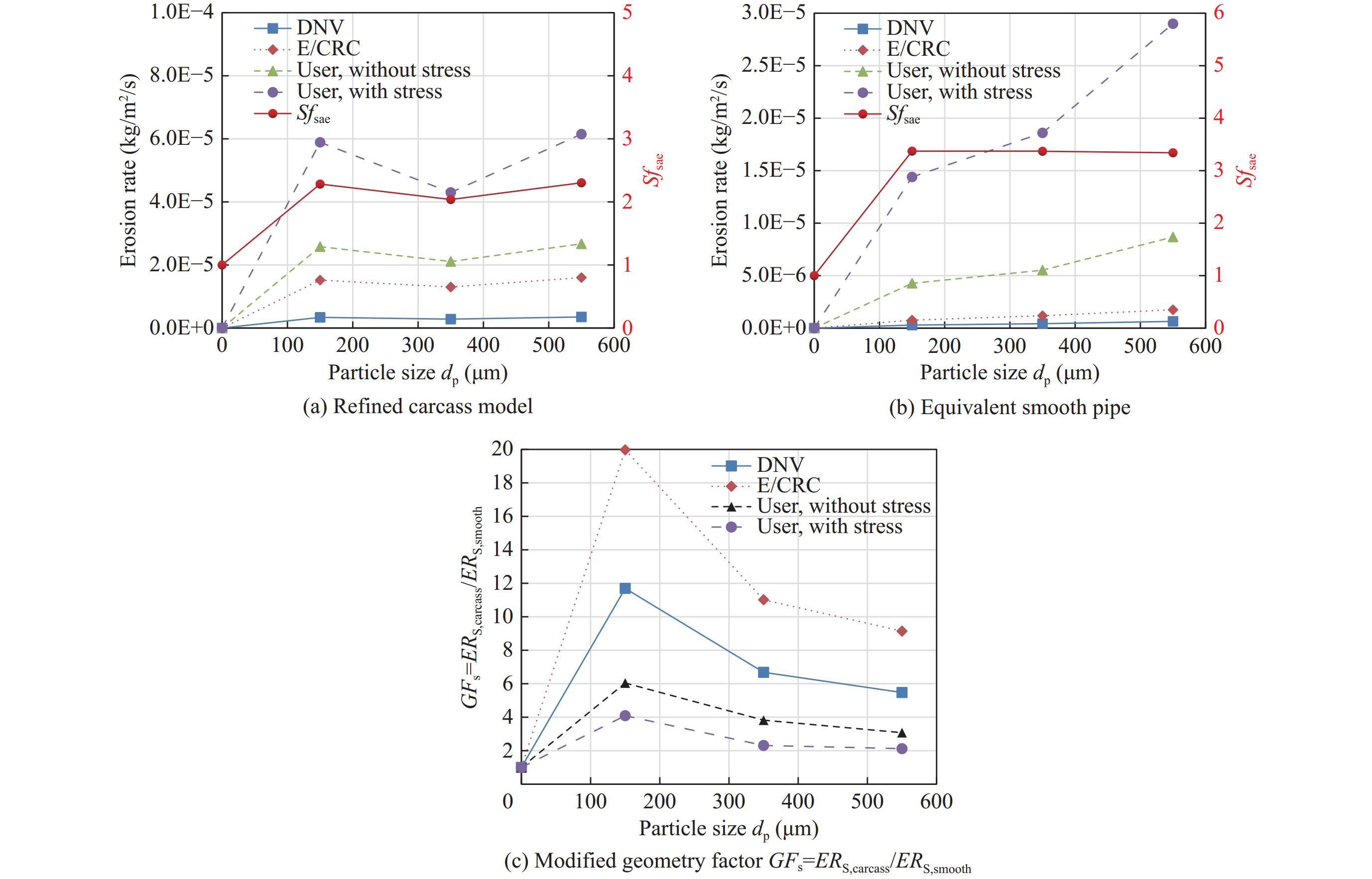
A carcass is the innermost layer of a deep-sea unbonded flexible pipe, which is in direct contact with the gas/liquid-solid multi-phase flow. Considering that stress-accelerated erosion is common for carcasses, this study proposes a general model and simulation method for stress-accelerated erosion (SE) of carcasses under external water pressure. First, an SE model suitable for 316 stainless steel was developed, which was then used for stress-erosion simulation for an external pressurized carcass, and the solid domain, fluid domain and rough inner surface of the carcass were carefully considered. Moreover, a simplified model (equivalent smooth pipe) was also established on the basis of the main geometric characteristics of the carcass, and the stress-erosion characteristics under different operating conditions, including the effects of the elastic stress level, flow velocity, particle diameter and concentration, were carefully compared, and the key factors governing the elastic stress-erosion of the carcass were discussed. Finally, a modified geometry factor (GF) for carcasses was proposed considering the stress acceleration effect.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 891 -903
doi: 10.1007/s13344-025-0069-7
[Abstract](0)
Abstract:
The umbilical, a key component in offshore energy extraction, plays a vital role in ensuring the stable operation of the entire production system. The extensive variety of cross-sectional components creates highly complex layout combinations. Furthermore, due to constraints in component quantity and geometry within the cross-sectional layout, filler bodies must be incorporated to maintain cross-section performance. Conventional design approaches based on manual experience suffer from inefficiency, high variability, and difficulties in quantification. This paper presents a multi-level automatic filling optimization design method for umbilical cross-sectional layouts to address these limitations. Initially, the research establishes a multi-objective optimization model that considers compactness, balance, and wear resistance of the cross-section, employing an enhanced genetic algorithm to achieve a near-optimal layout. Subsequently, the study implements an image processing-based vacancy detection technique to accurately identify cross-sectional gaps. To manage the variability and diversity of these vacant regions, the research introduces a multi-level filling method that strategically selects and places filler bodies of varying dimensions, overcoming the constraints of uniform-size fillers. Additionally, the method incorporates a hierarchical strategy that subdivides the complex cross-section into multiple layers, enabling layer-by-layer optimization and filling. This approach reduces manufacturing equipment requirements while ensuring practical production process feasibility. The methodology is validated through a specific umbilical case study. The results demonstrate improvements in compactness, balance, and wear resistance compared with the initial cross-section, offering novel insights and valuable references for filler design in umbilical cross-sections.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 904 -916
doi: 10.1007/s13344-025-0070-1
[Abstract](0)
Abstract:
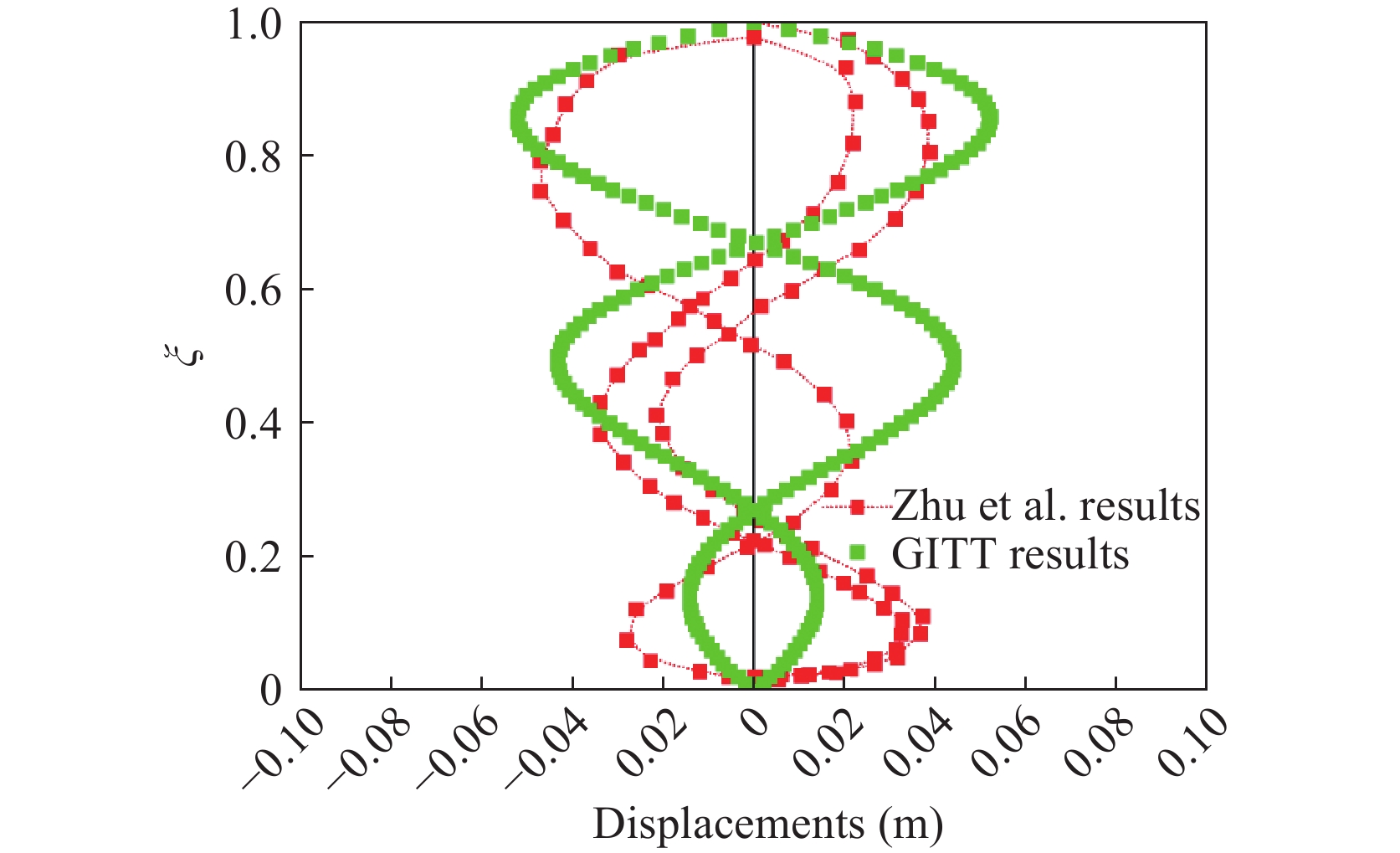
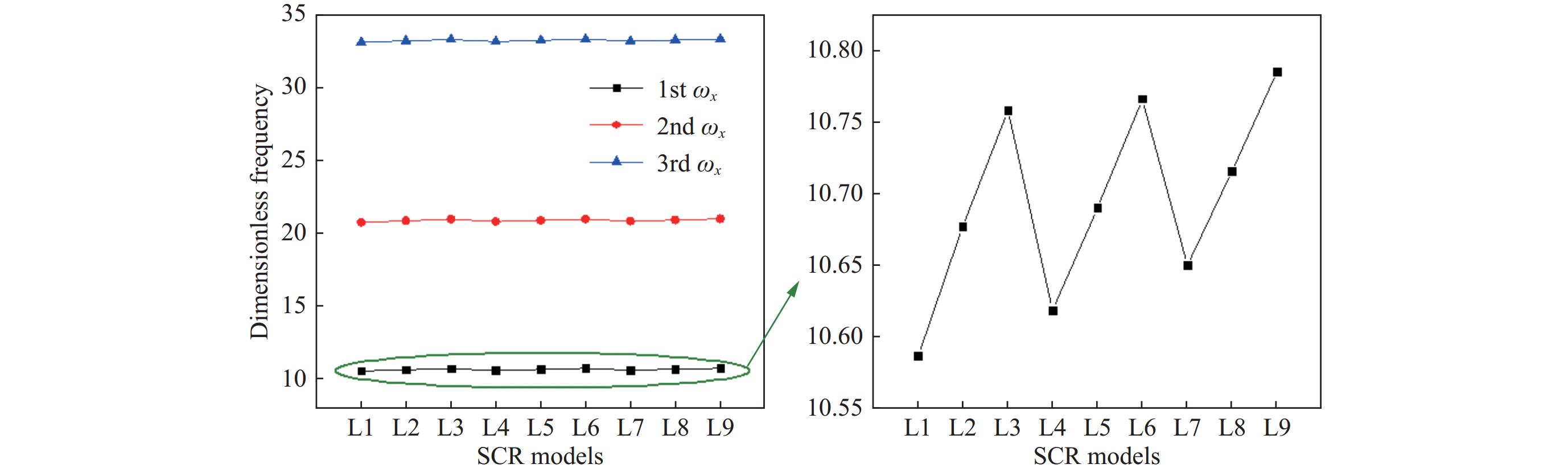
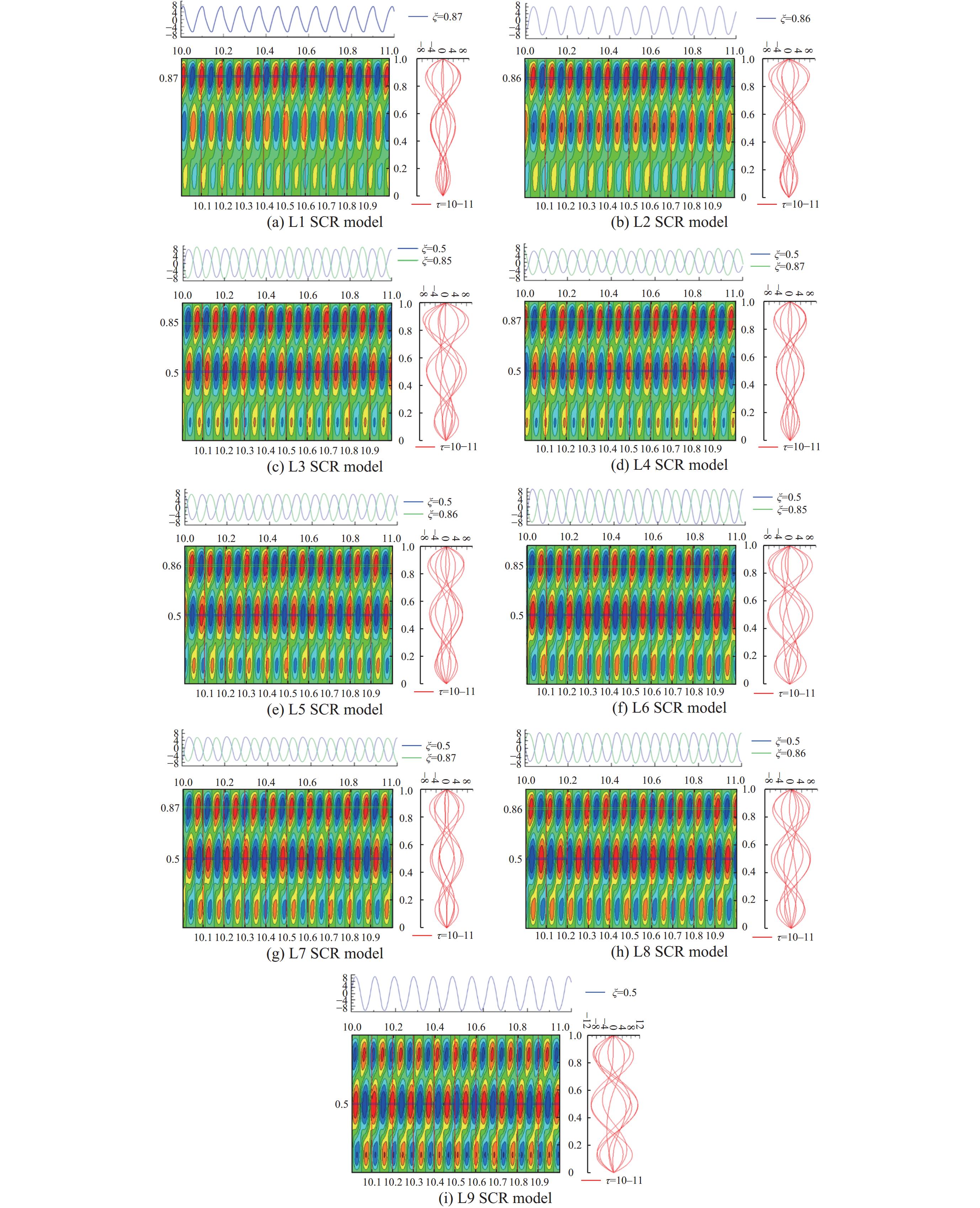
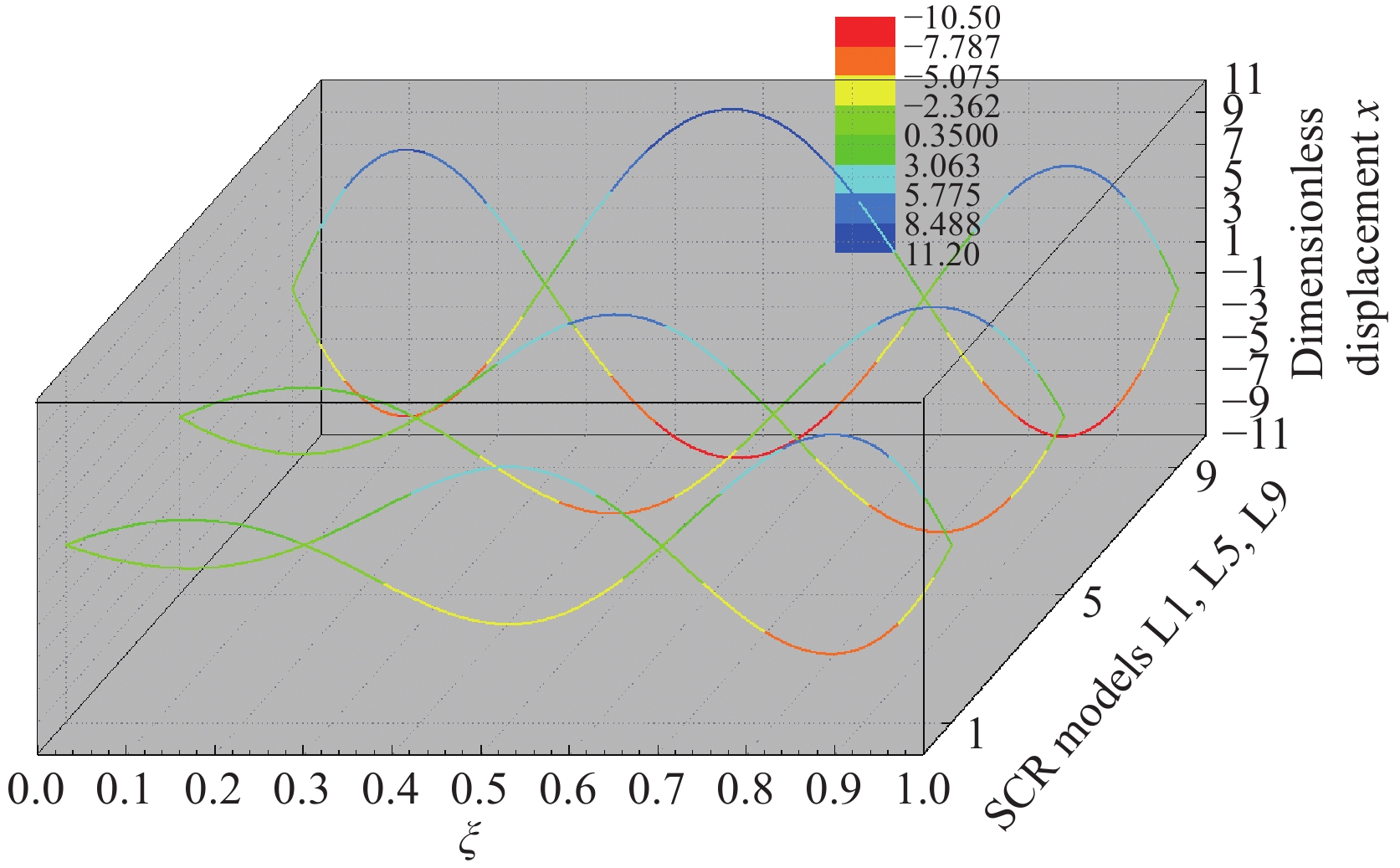
As oil and gas exploration moves into deeper waters, marine risers are subjected to increasingly complex service conditions, including vessel motions, ocean currents, seabed-soil interactions, and internal flow effects. This work establishes a dynamic behavior model of steel catenary risers (SCRs) with varying curvatures subjected to internal flow and external currents and considers the effects of pipe-soil interactions on the curvature profile. The governing equation is solved via the generalized integral transform technique (GITT), which yields a semi-analytical solution of a high-order nonlinear partial differential equation. Parametric studies are then performed to analyze the effects of varying curvature on the vibration frequency and amplitude of SCRs. The vibration frequency and amplitude increase with the touchdown angle and hang-off angle, although the effect of the hang-off angle is negligible. Additionally, as the curvature increases along the centerline axis, the position of the maximum amplitude of the SCR moves upward.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 917 -927
doi: 10.1007/s13344-025-0071-0
[Abstract](0)
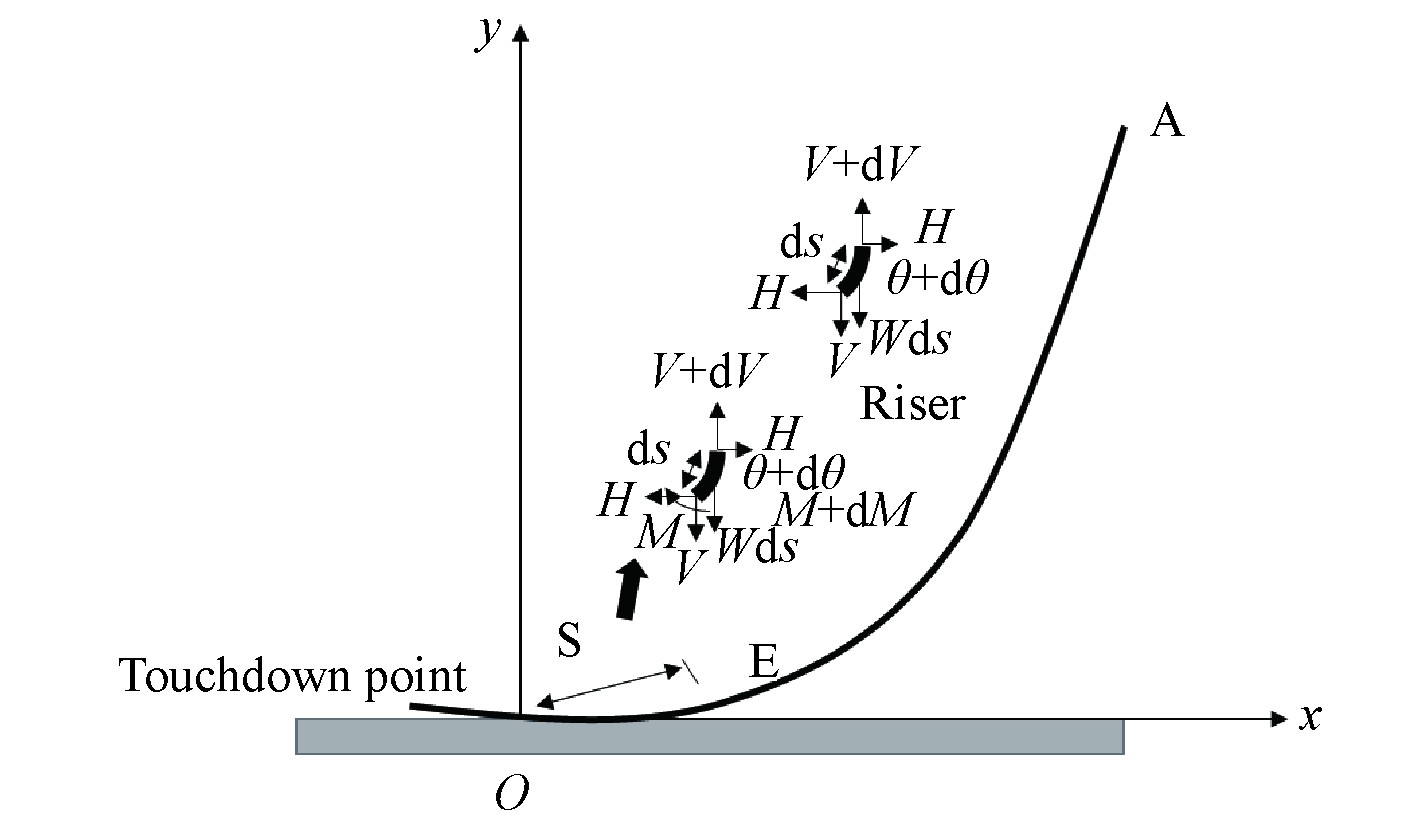
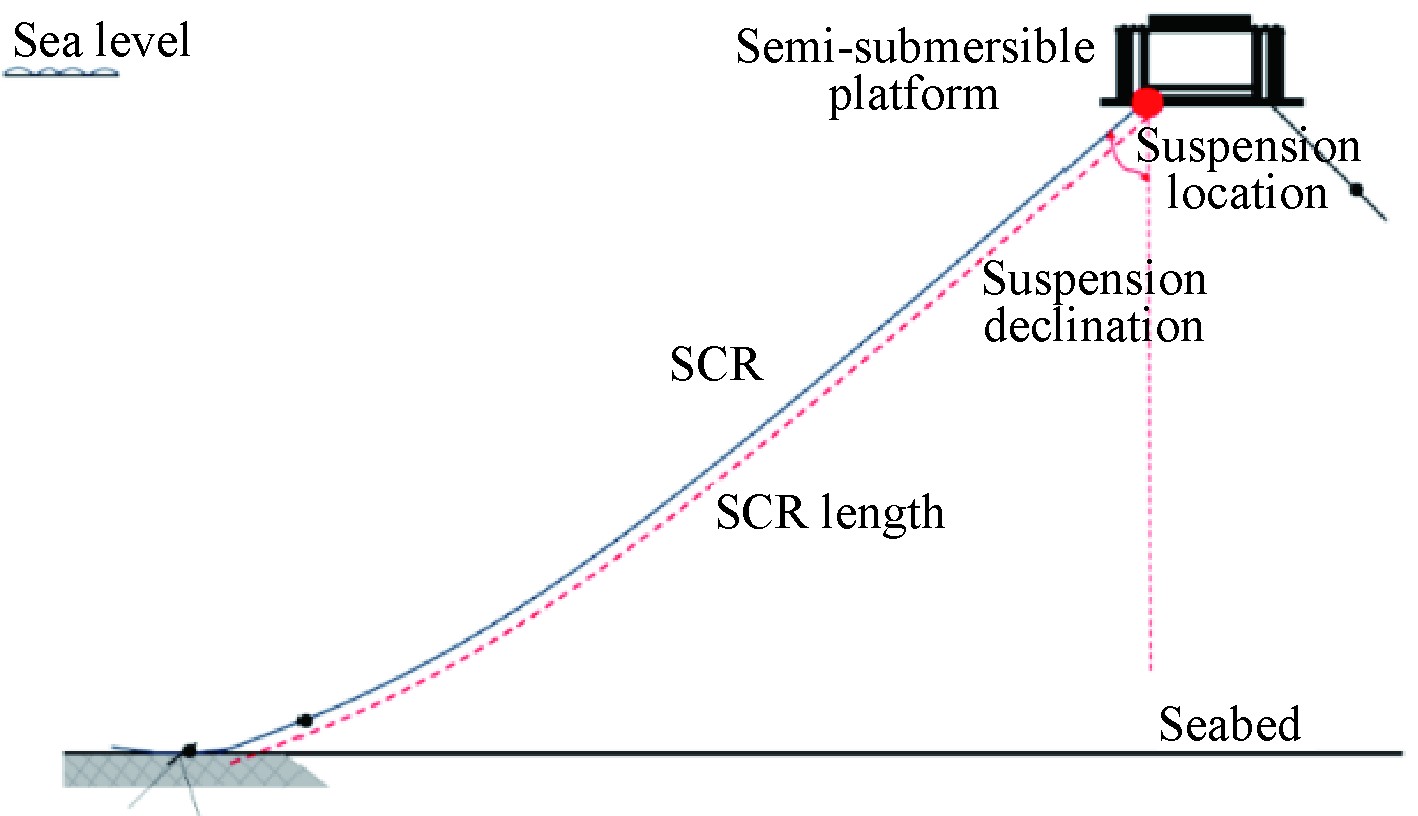
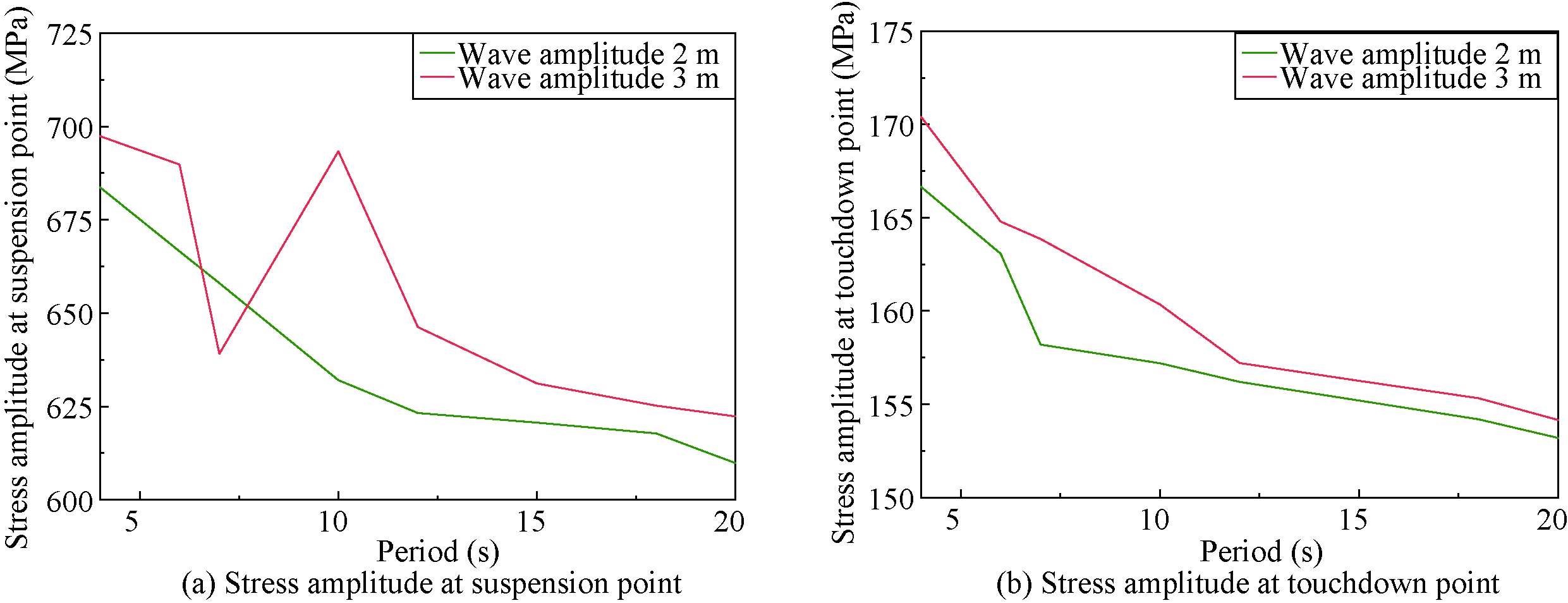
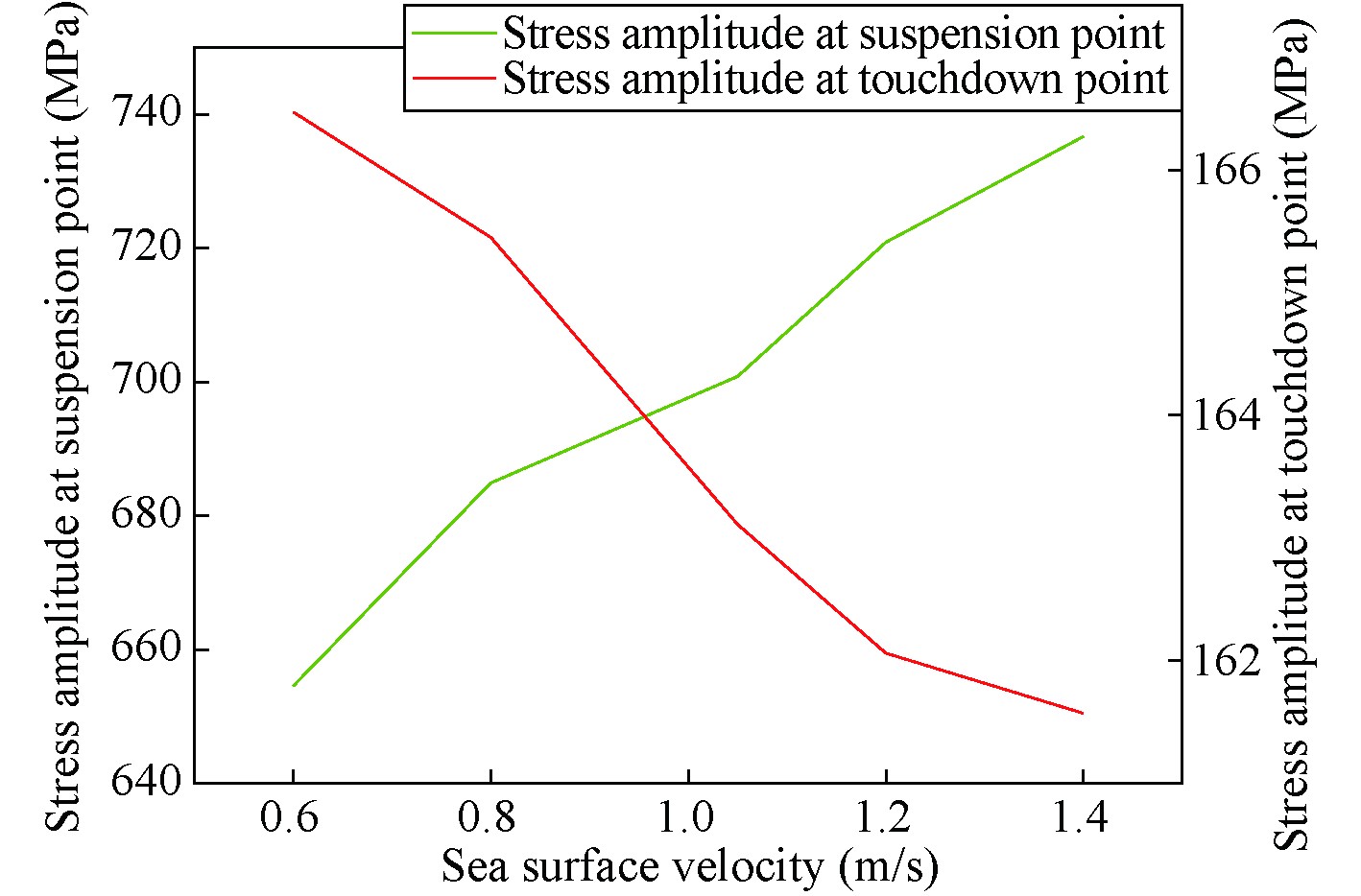
Abstract:
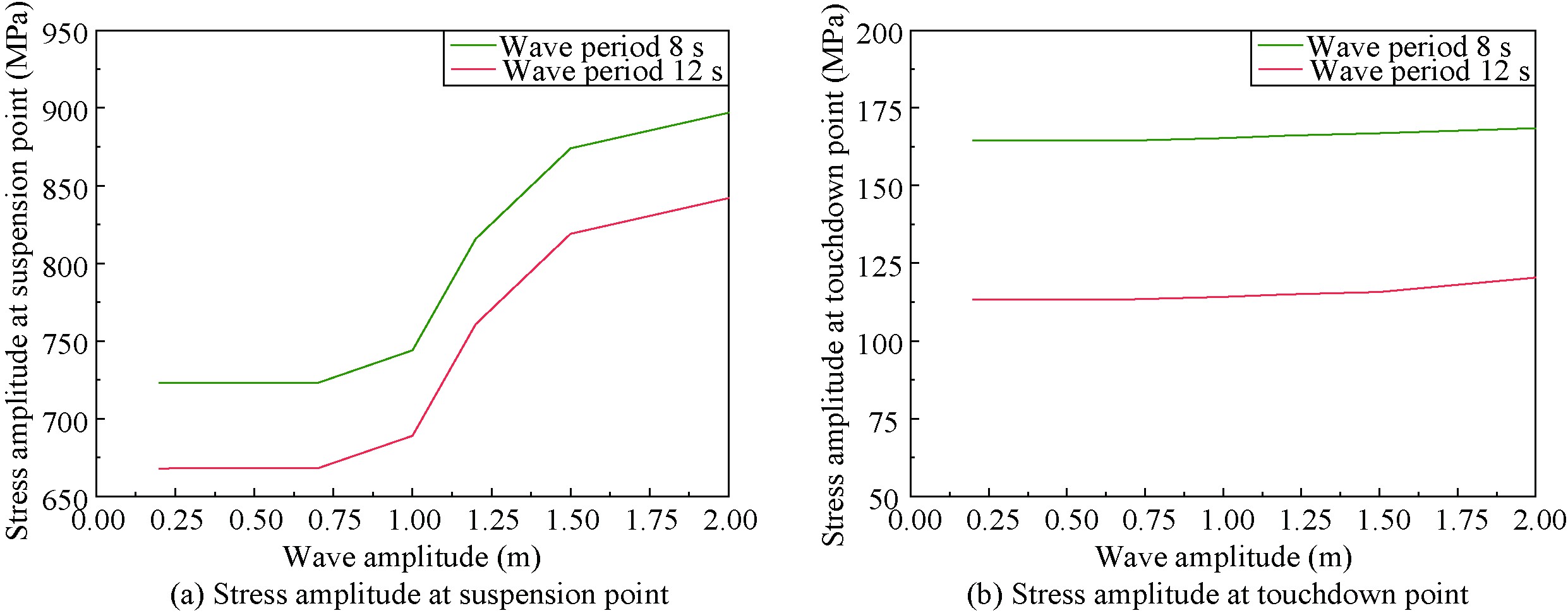
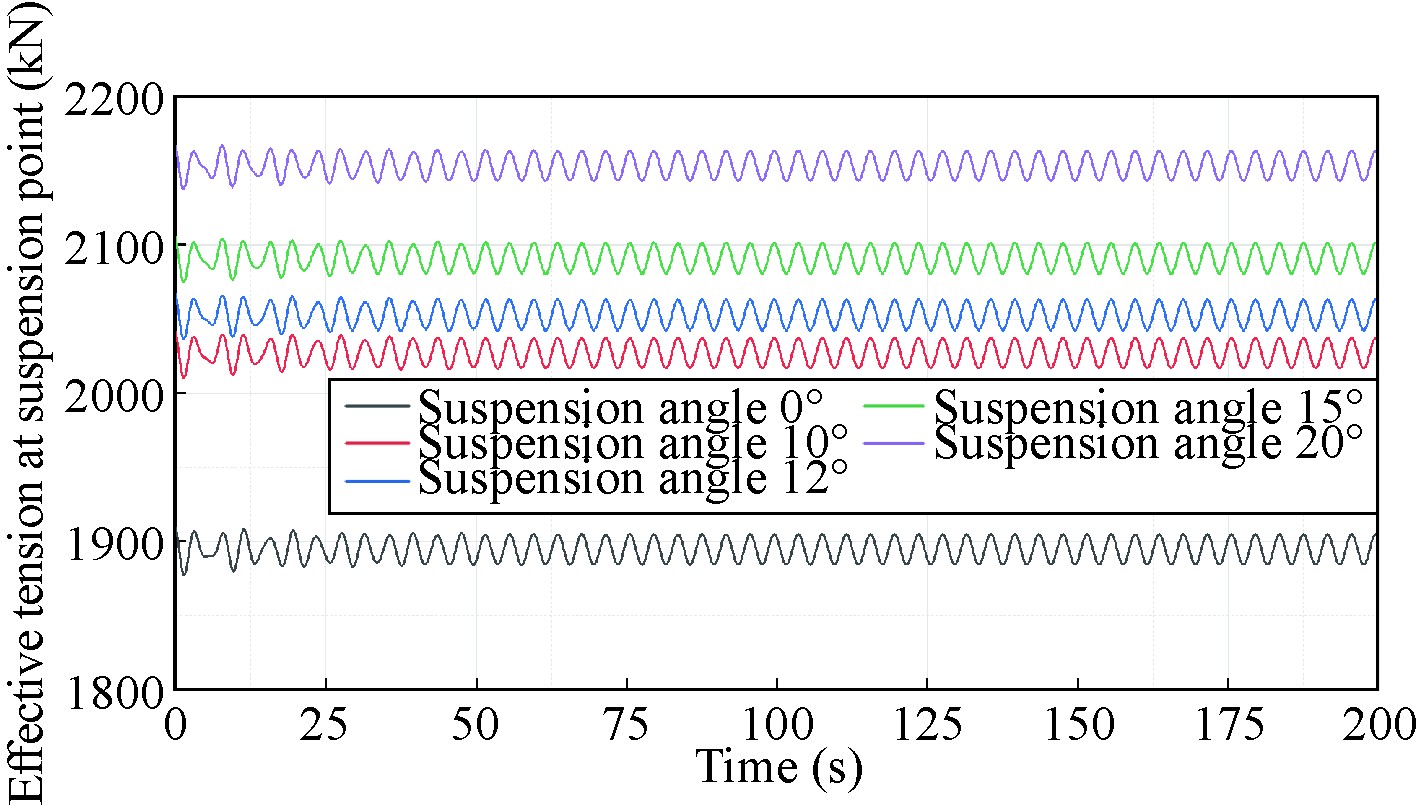
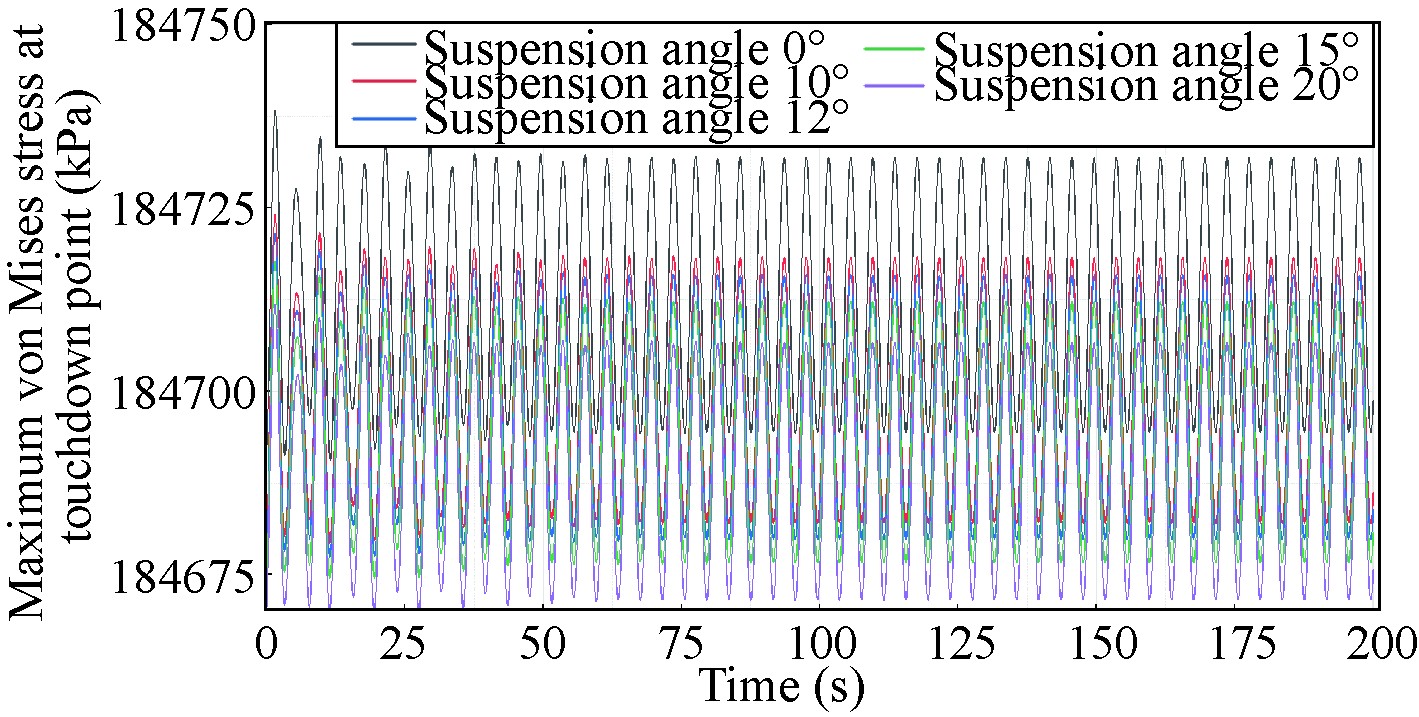
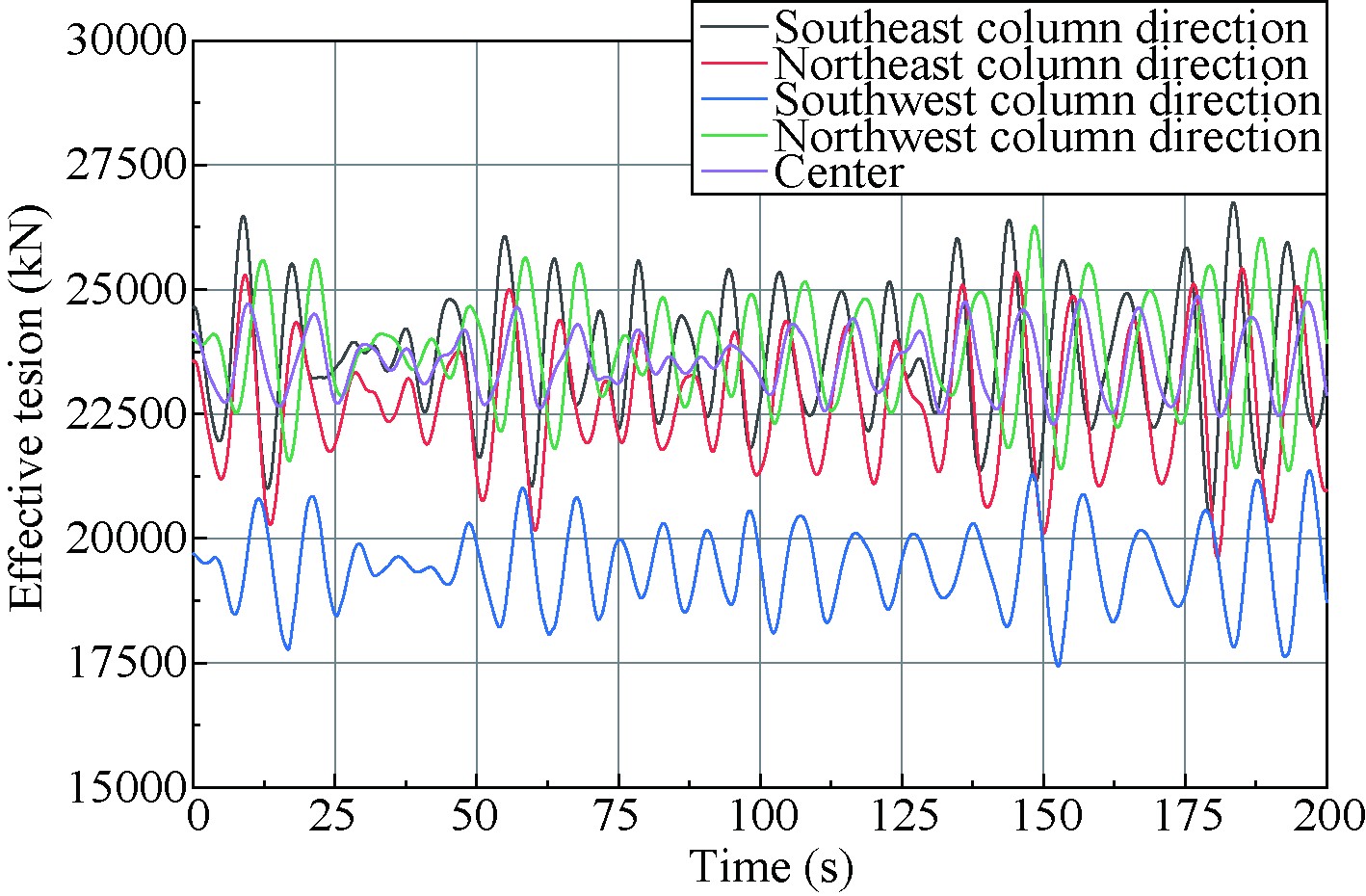
Steel catenary riser represents the pioneering riser technology implemented in China’s deep-sea oil and gas operations. Given the complex mechanical conditions of the riser, extensive research has been conducted on its dynamic analysis and structural design. This study investigates a deep-sea oil and gas field by developing a coupled model of a semi-submersible platform and steel catenary riser to analyze it mechanical behavior under extreme marine conditions. Through multi-objective optimization methodology, the study compares and analyzes suspension point tension and touchdown point stress under various conditions by modifying the suspension position, suspension angle, and catenary length. The optimal configuration parameters were determined: a suspension angle of 12°, suspension position in the southwest direction of the column, and a catenary length of approximately 2000 m. These findings elucidate the impact of configuration parameters on riser dynamic response and establish reasonable parameter layout ranges for adverse sea conditions, offering valuable optimization strategies for steel catenary riser deployment in domestic deep-sea oil and gas fields.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 928 -940
doi: 10.1007/s13344-025-0072-z
[Abstract](0)
Abstract:
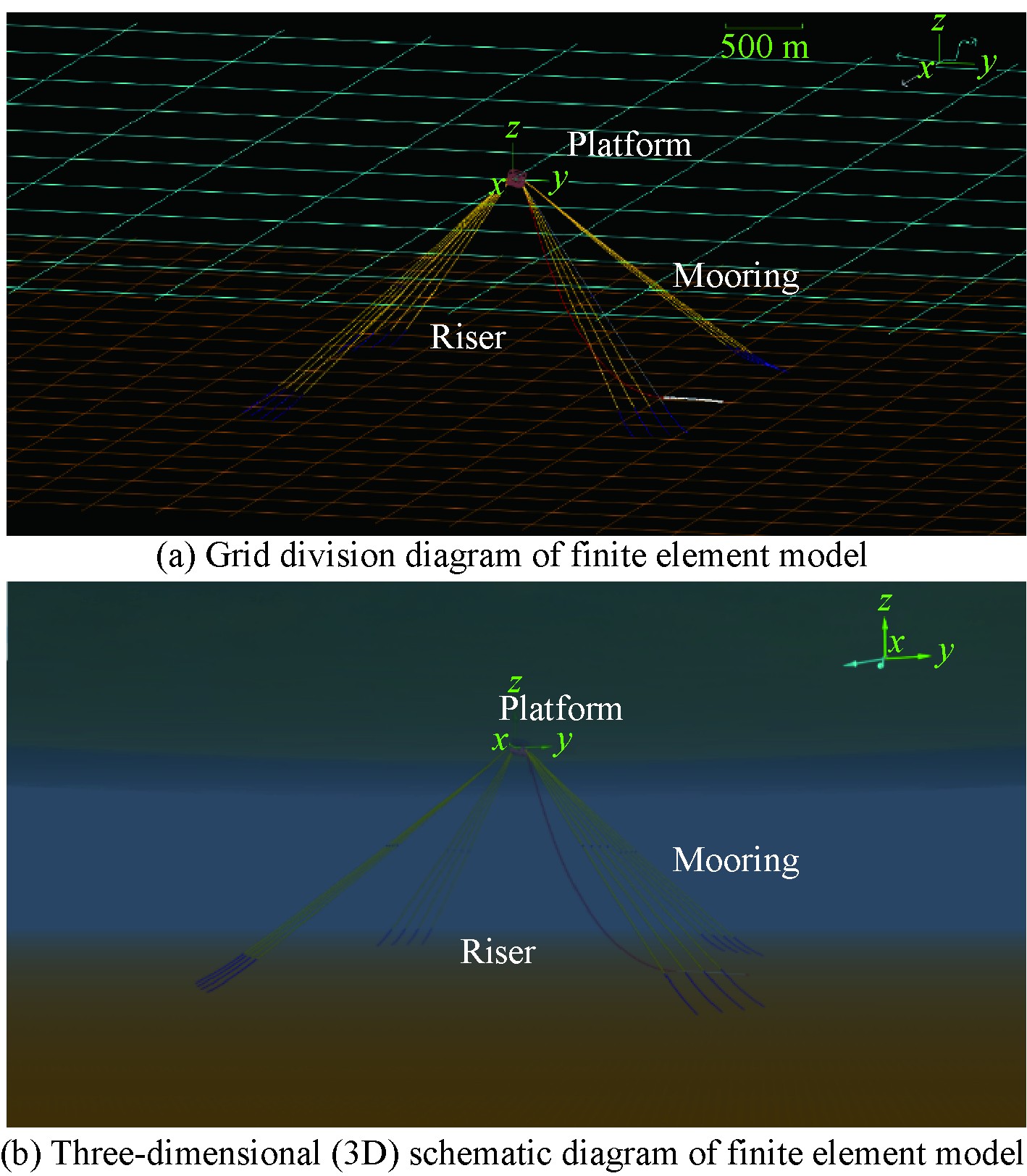
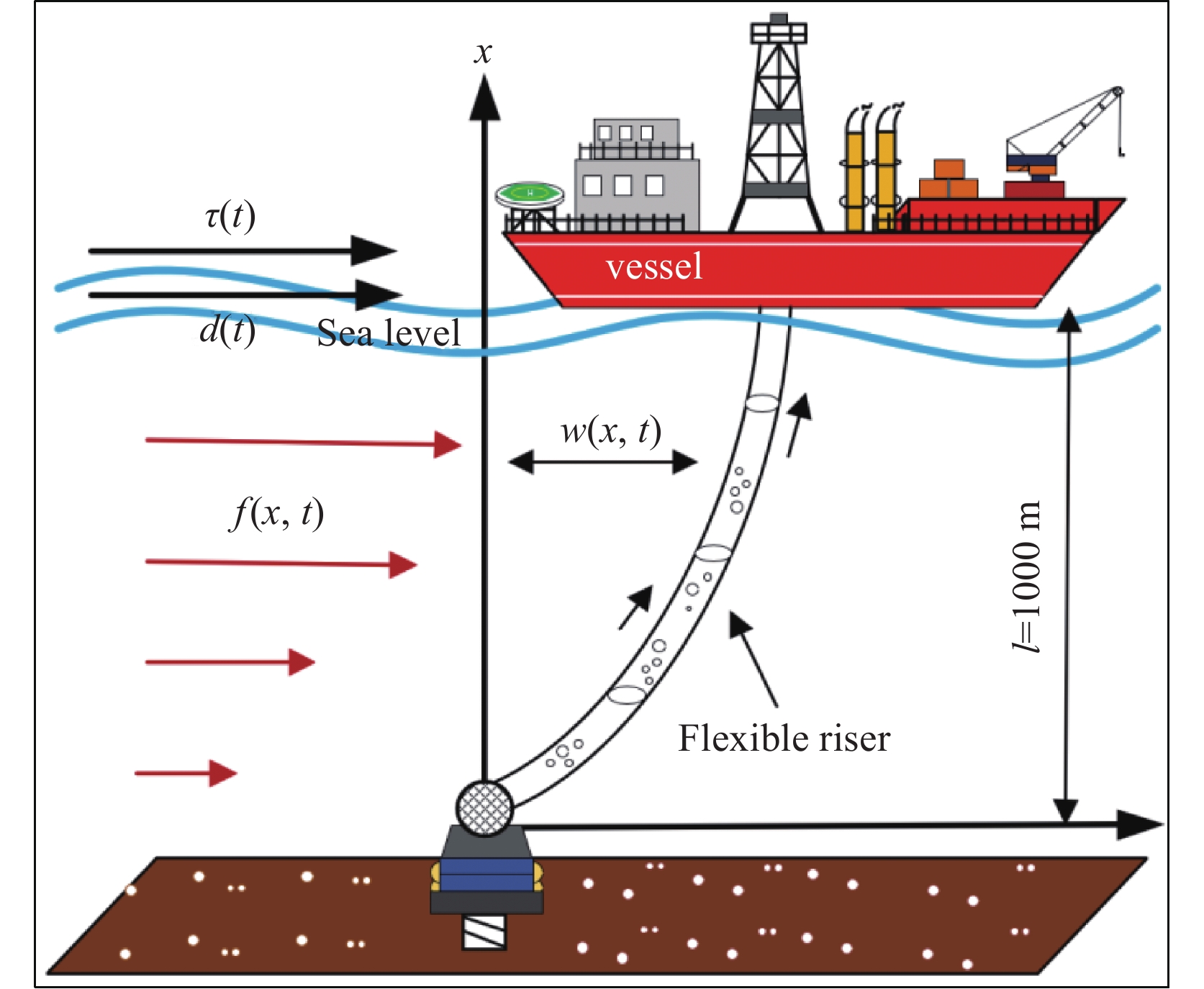
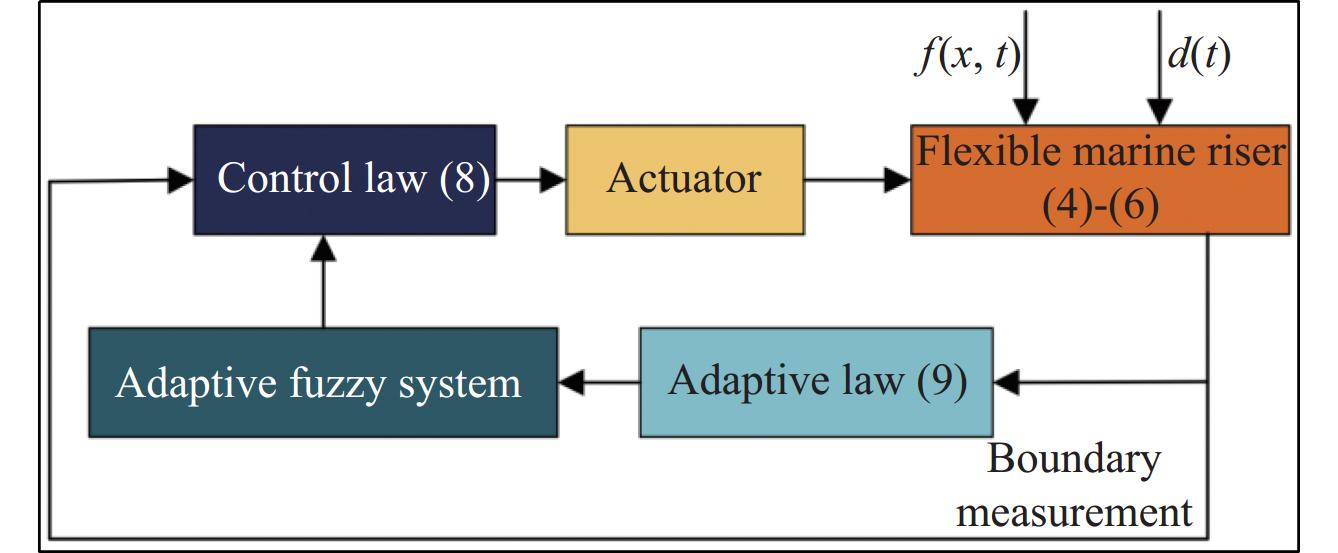
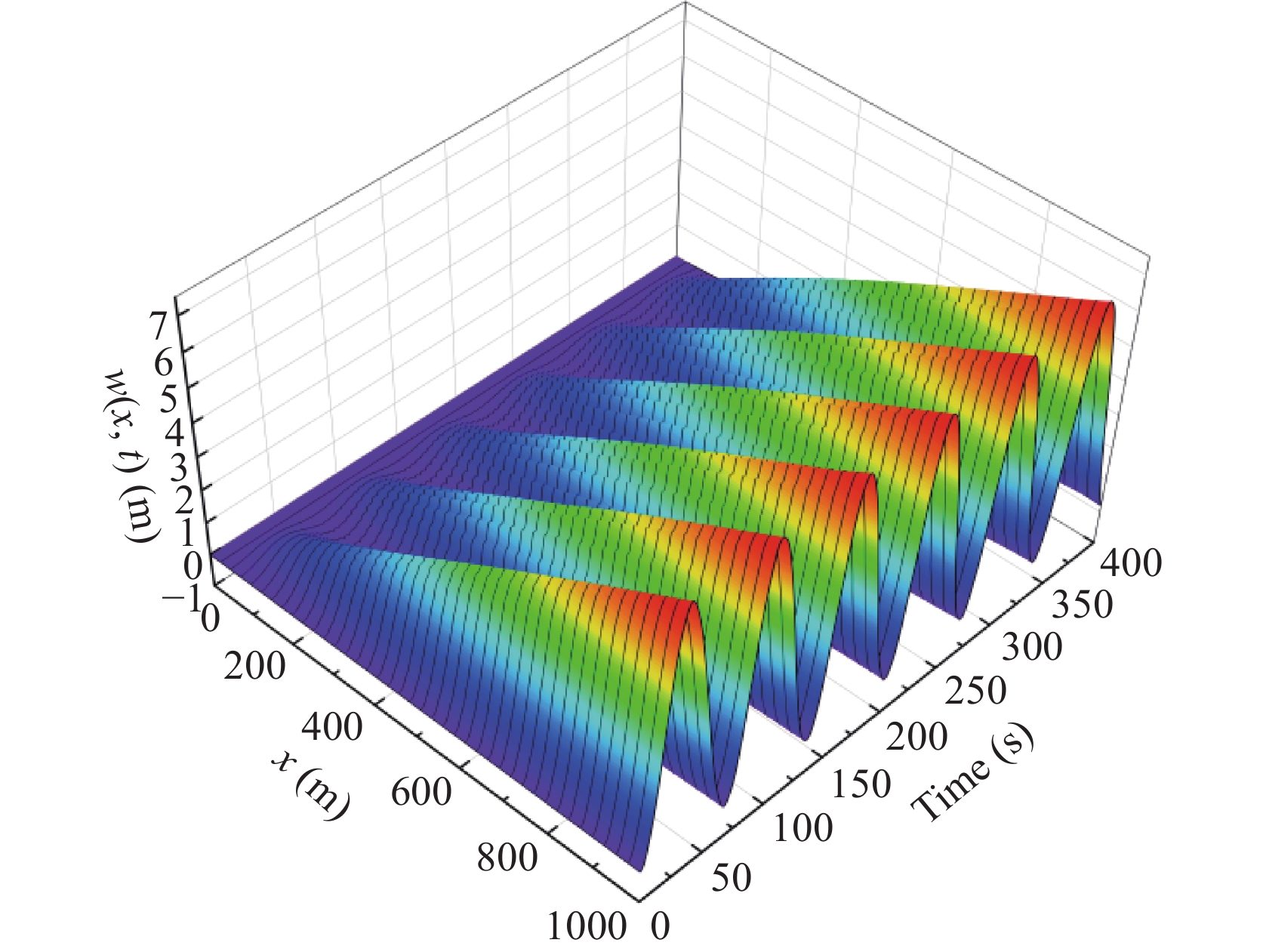
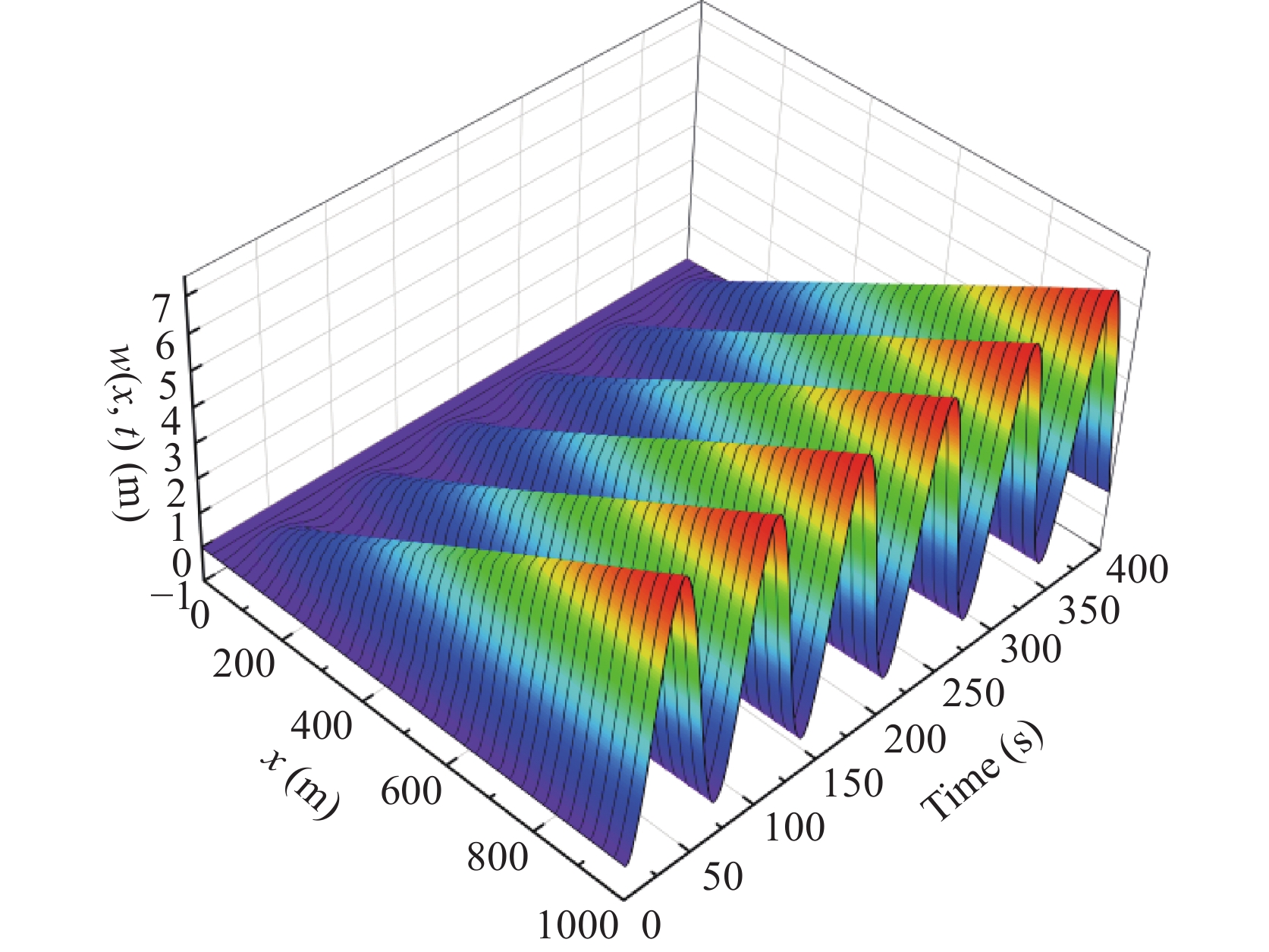
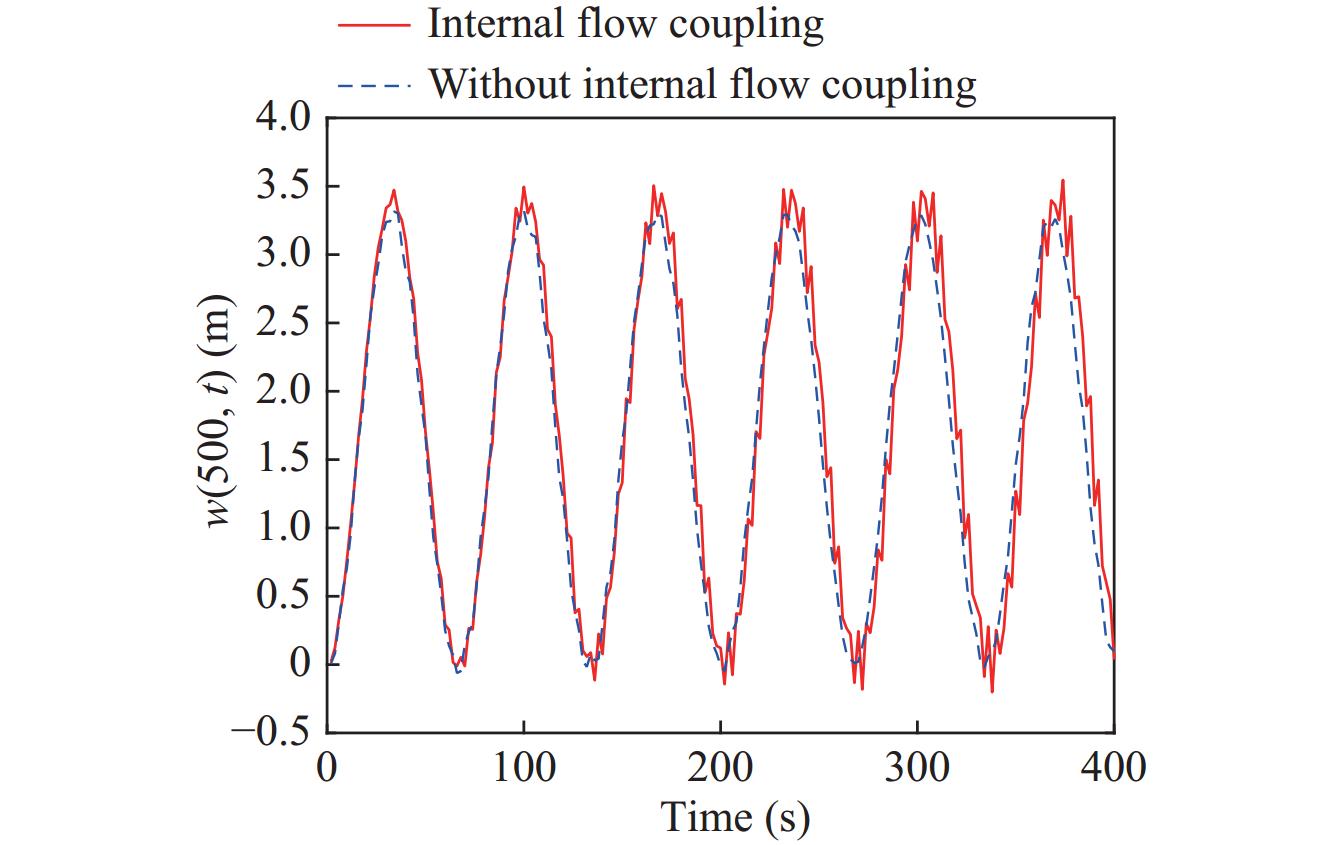
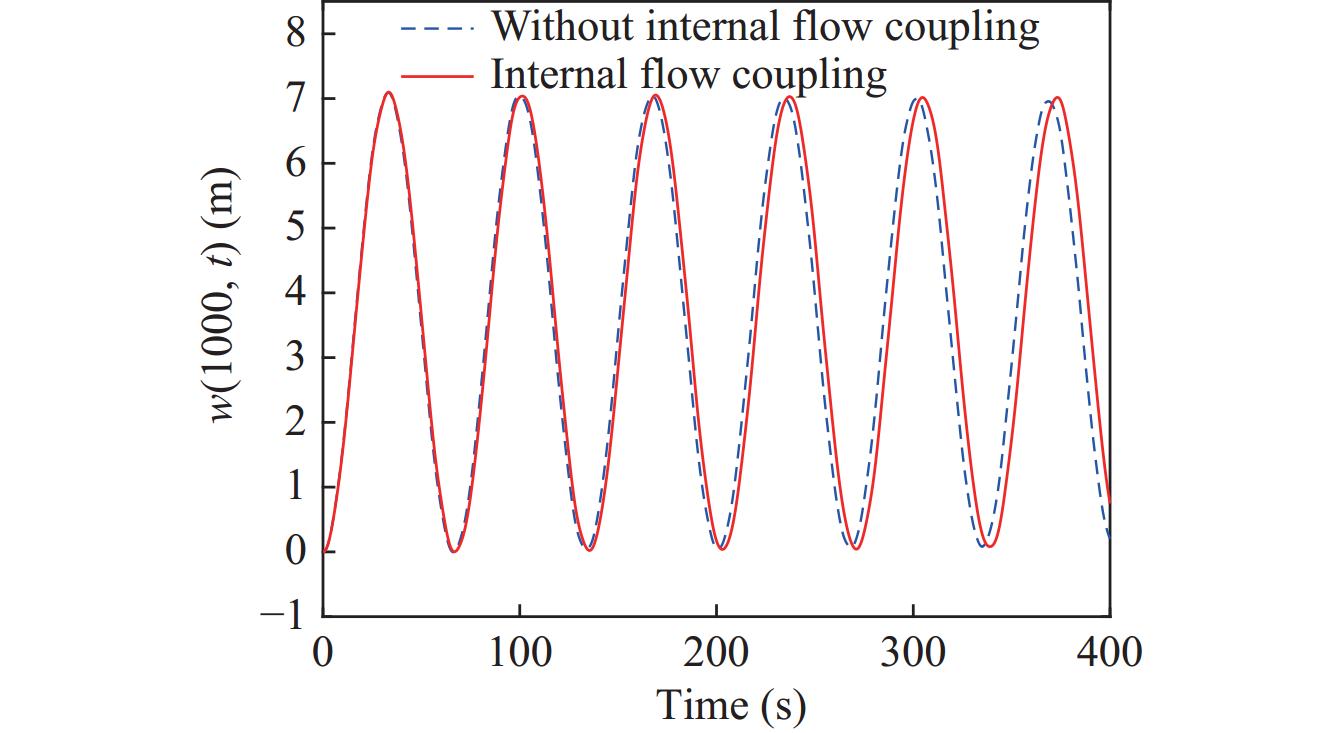
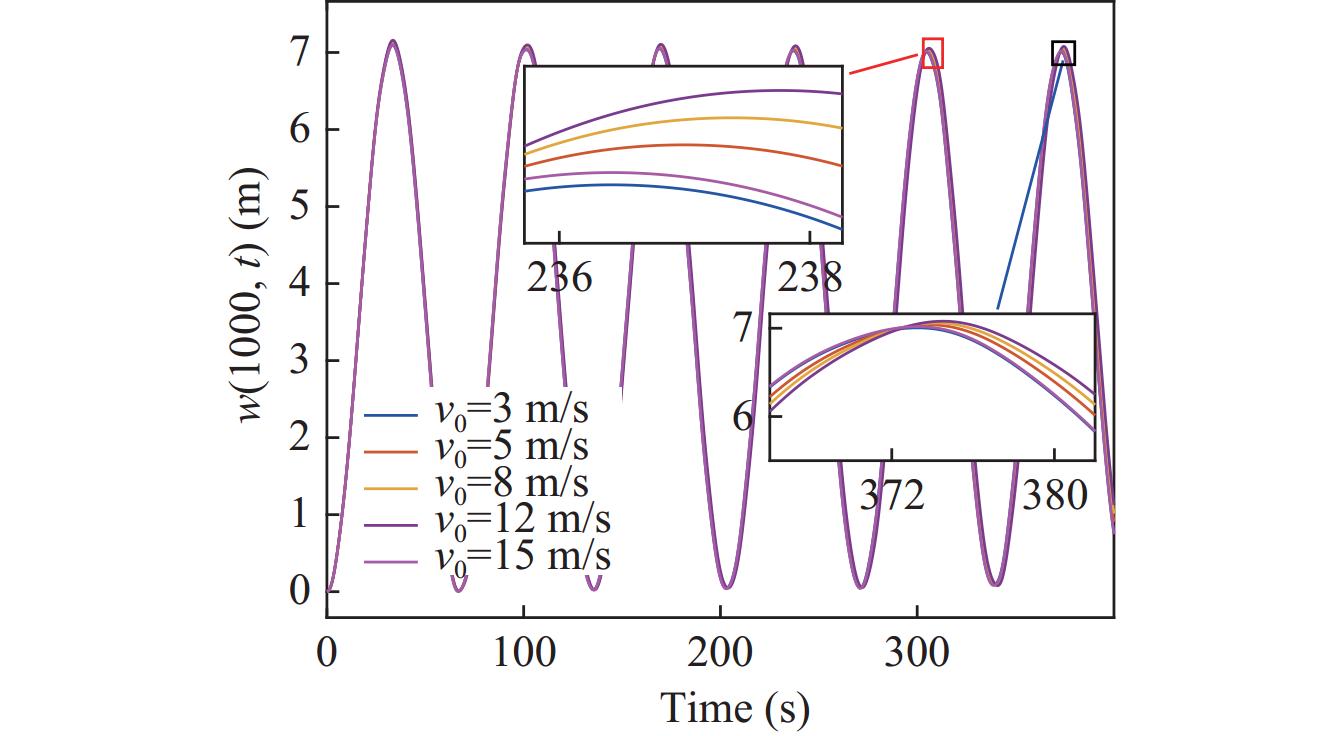
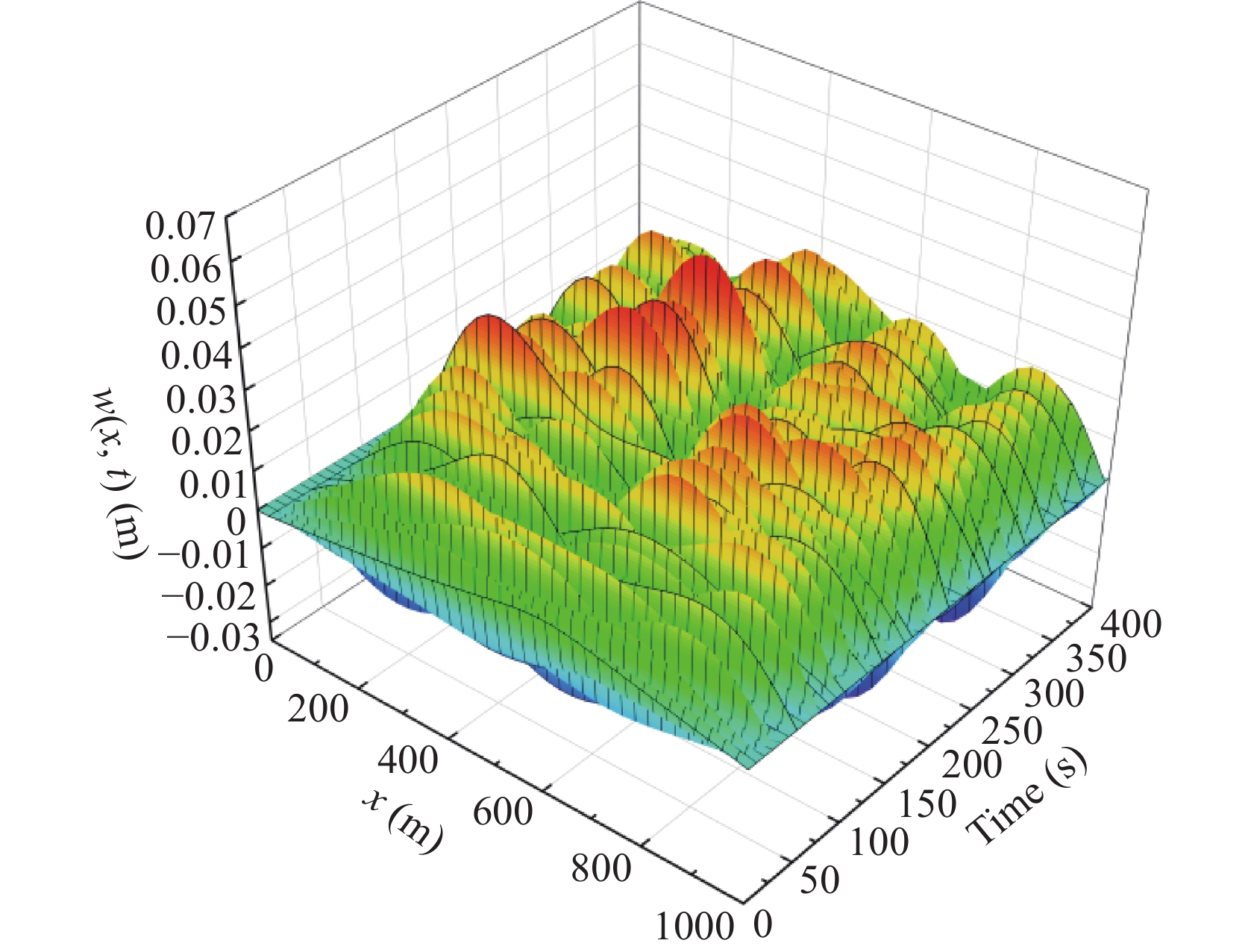
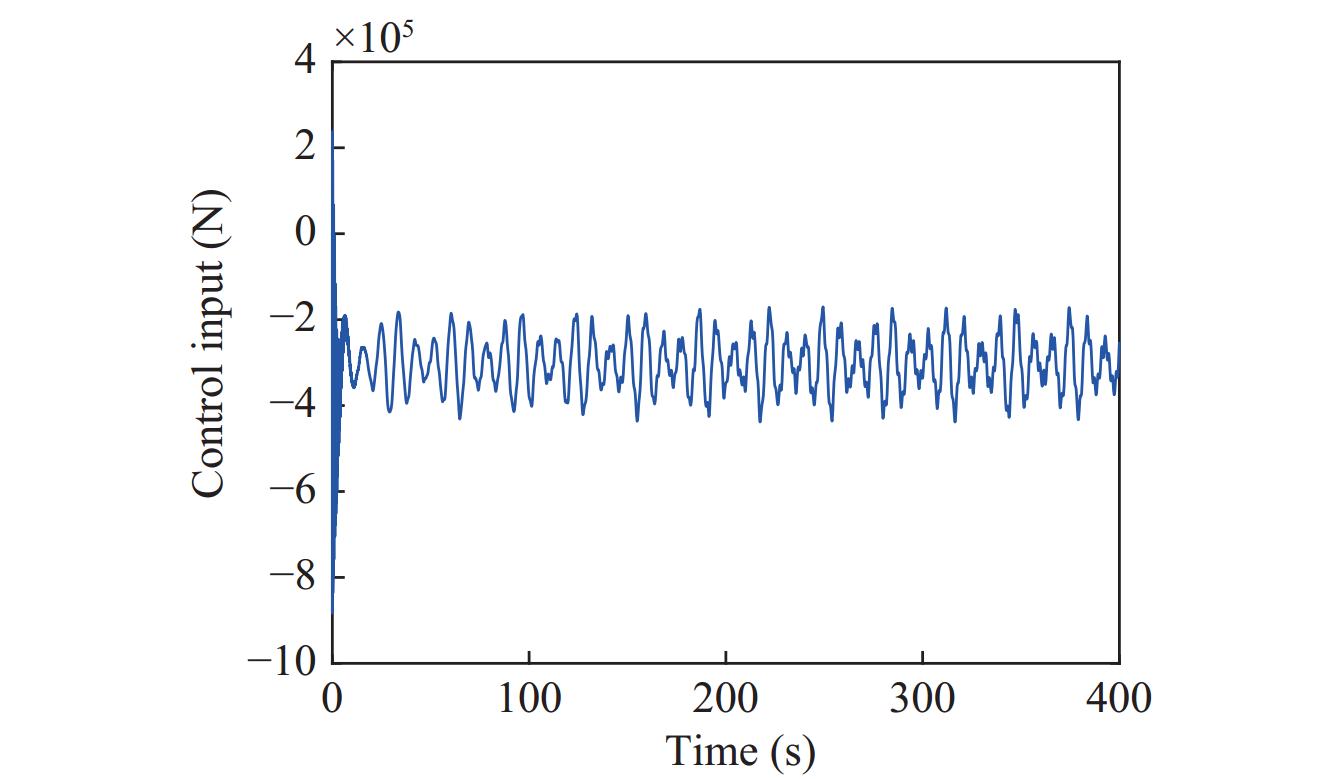
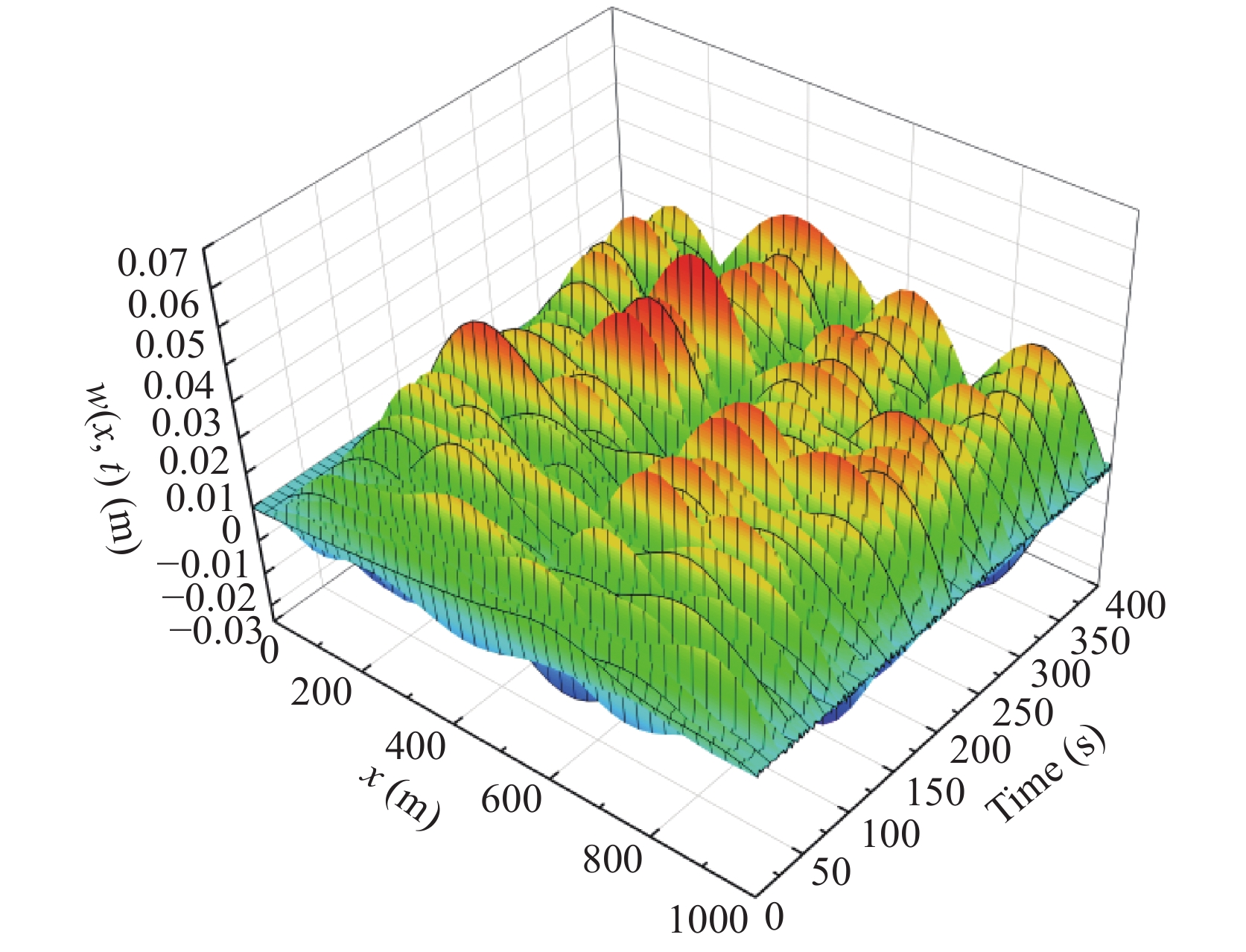
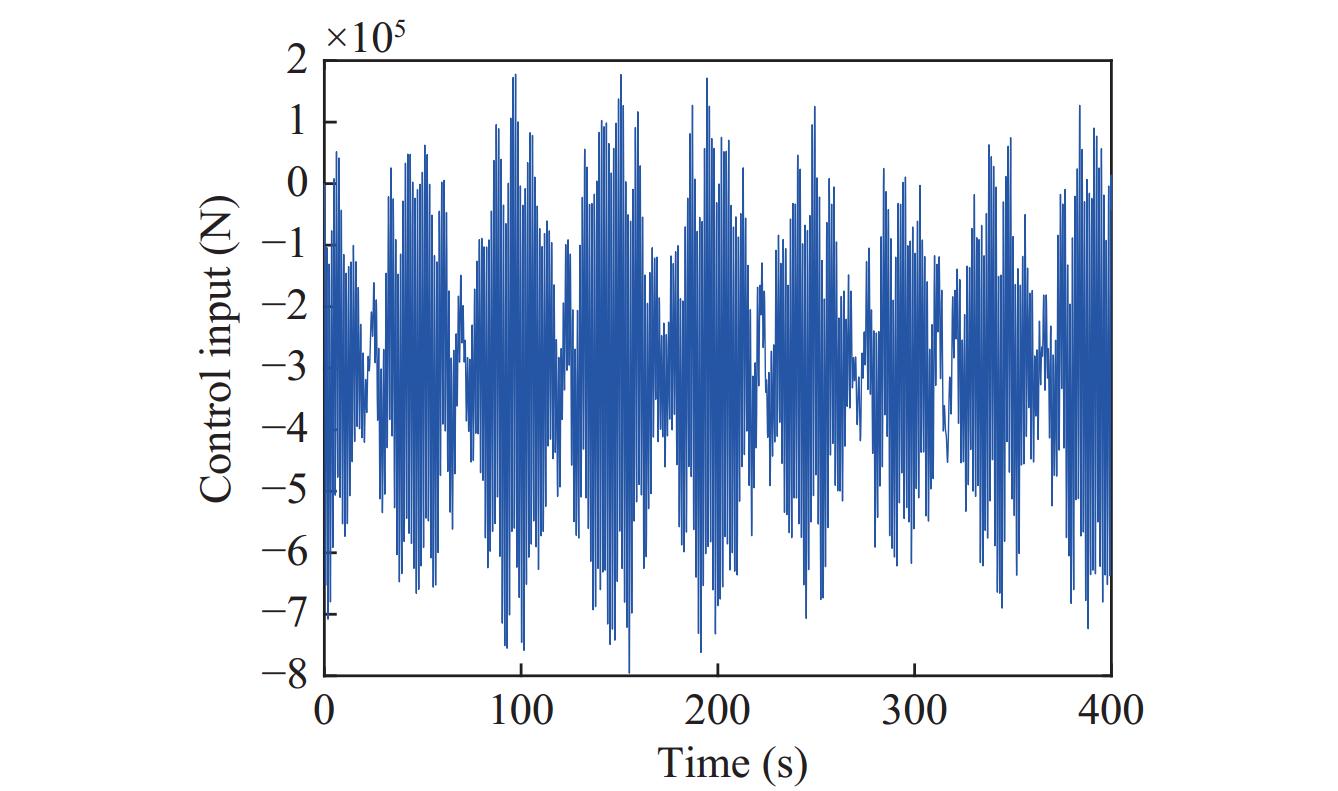
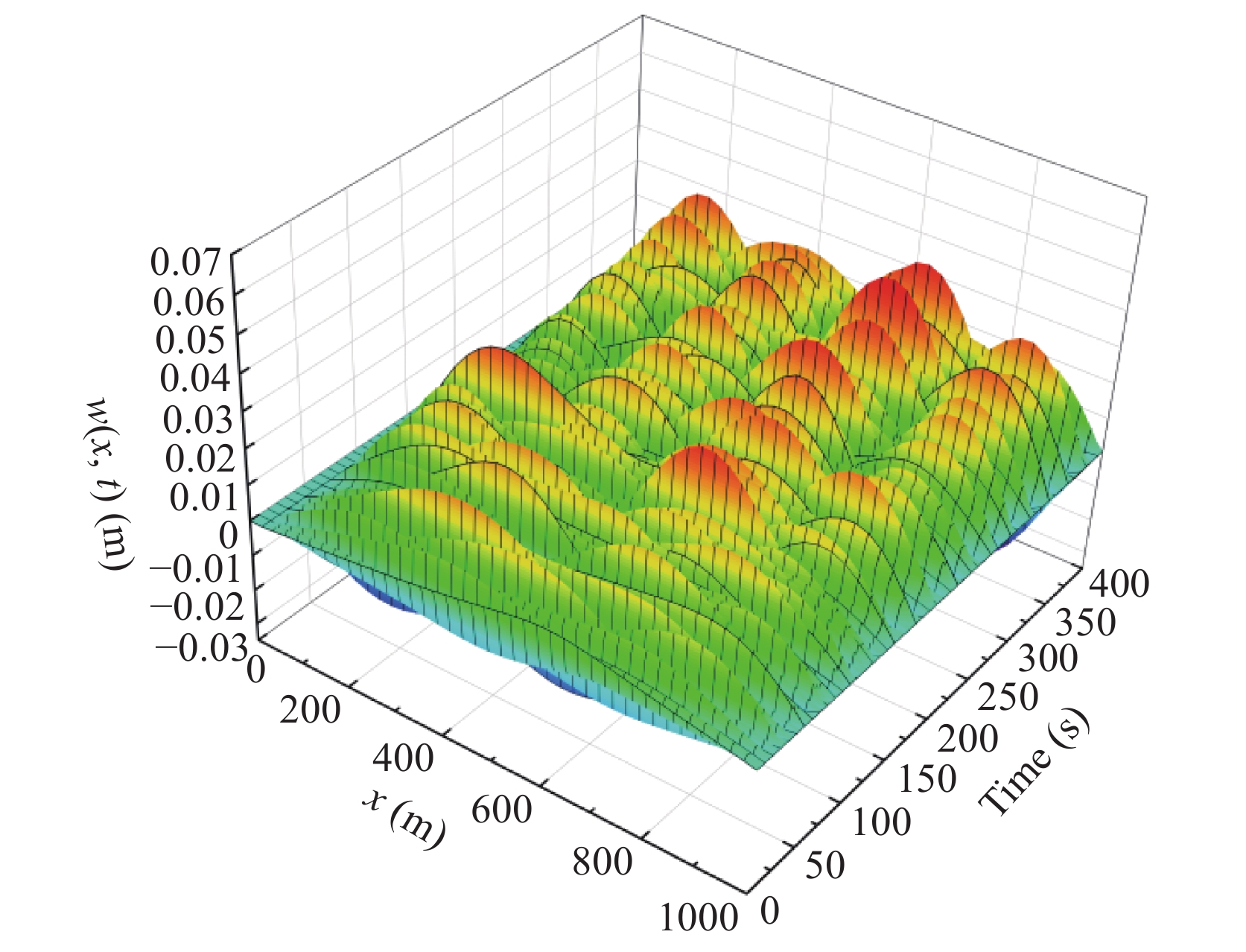
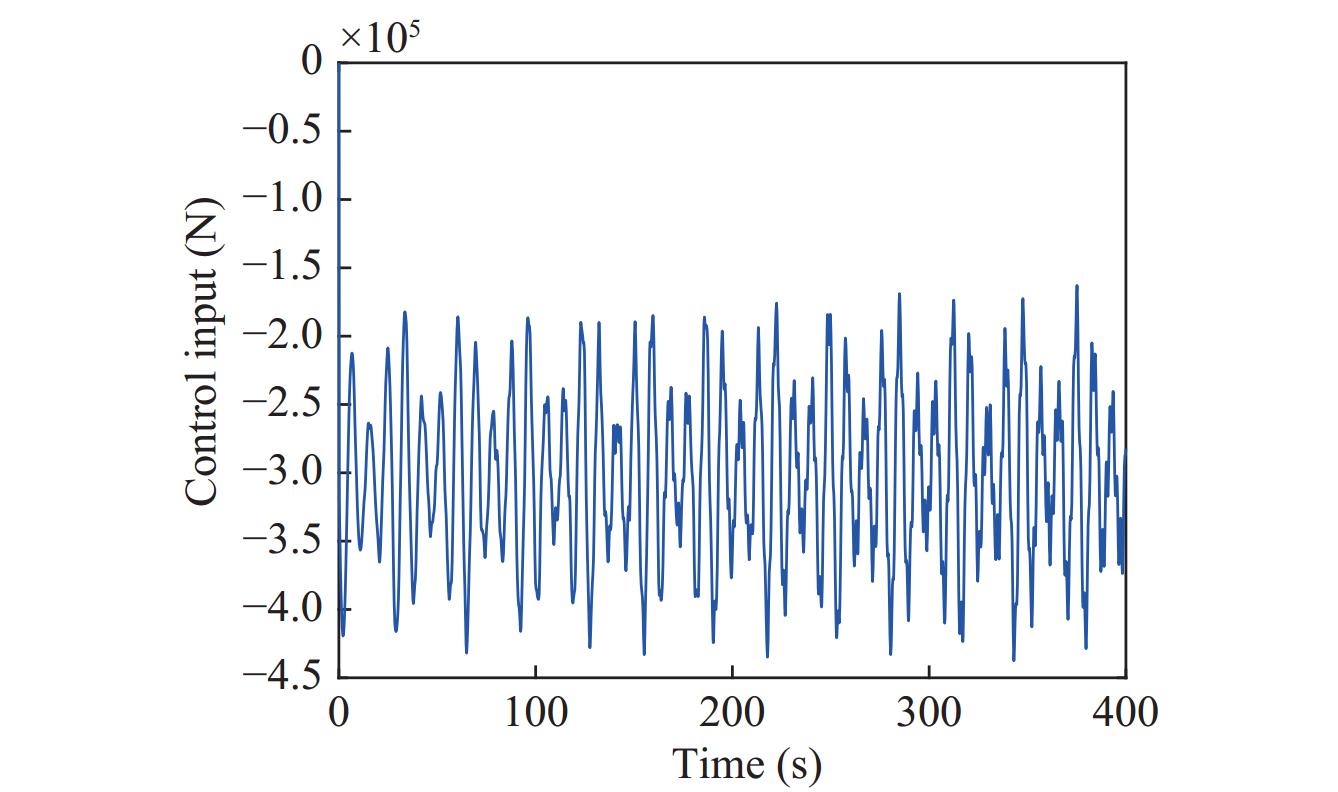
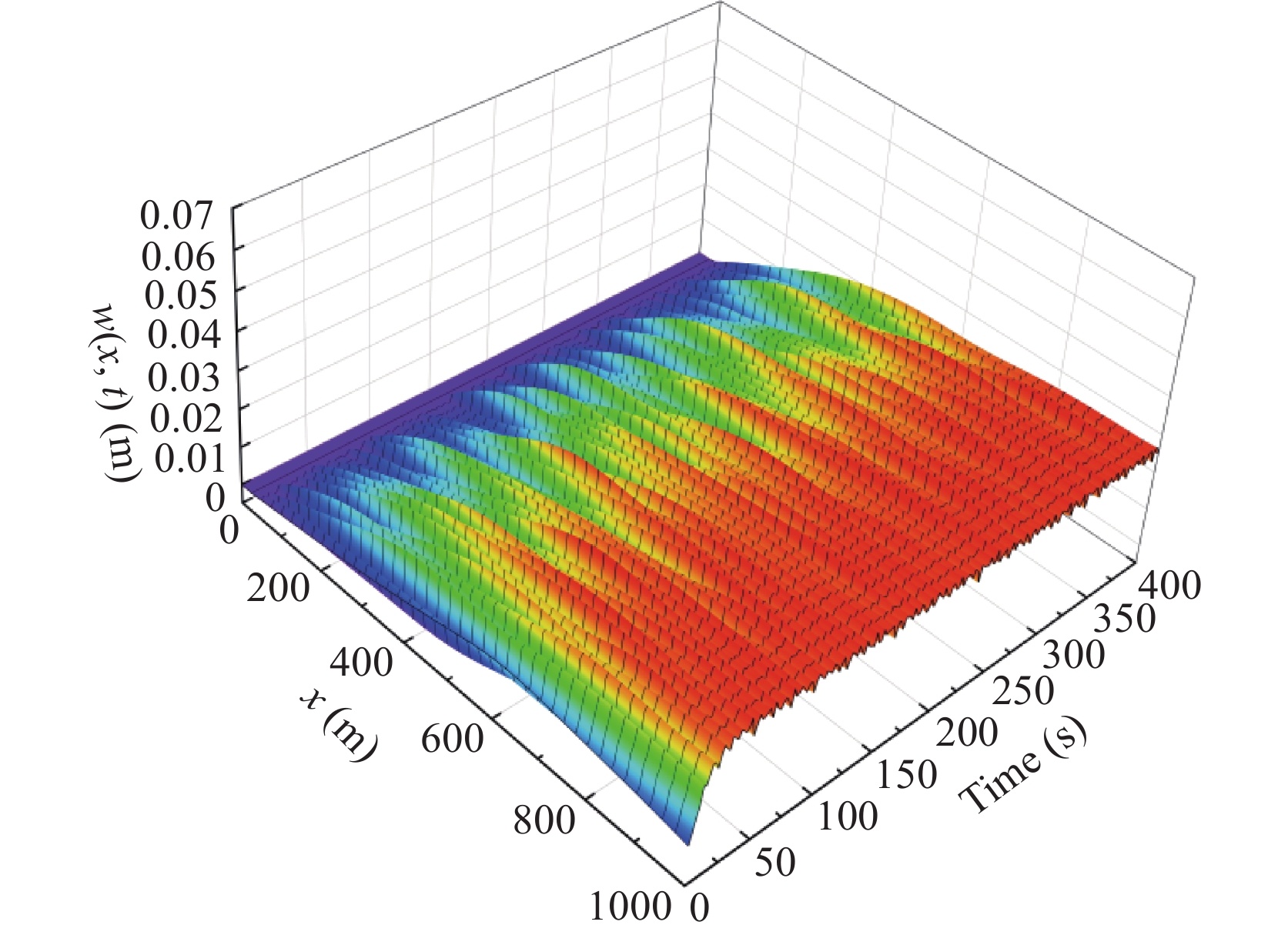
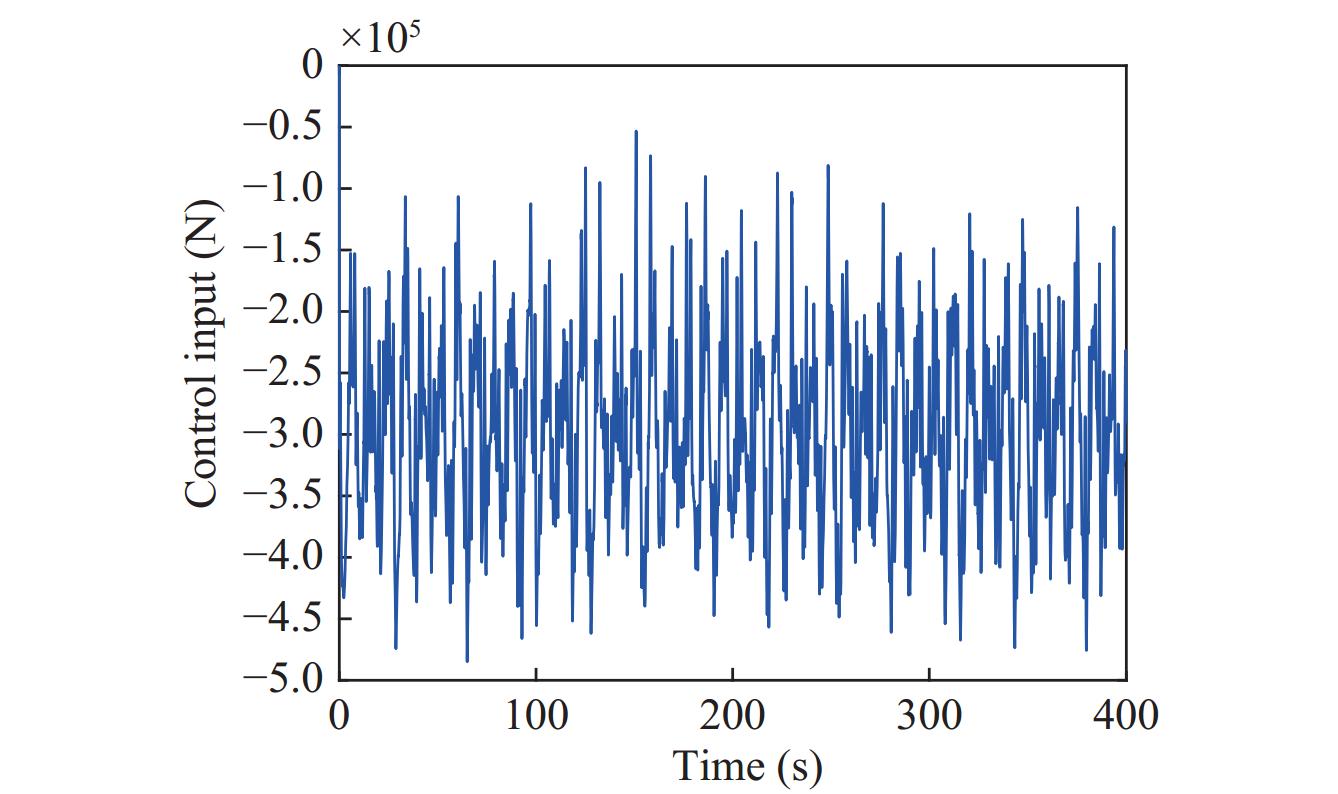
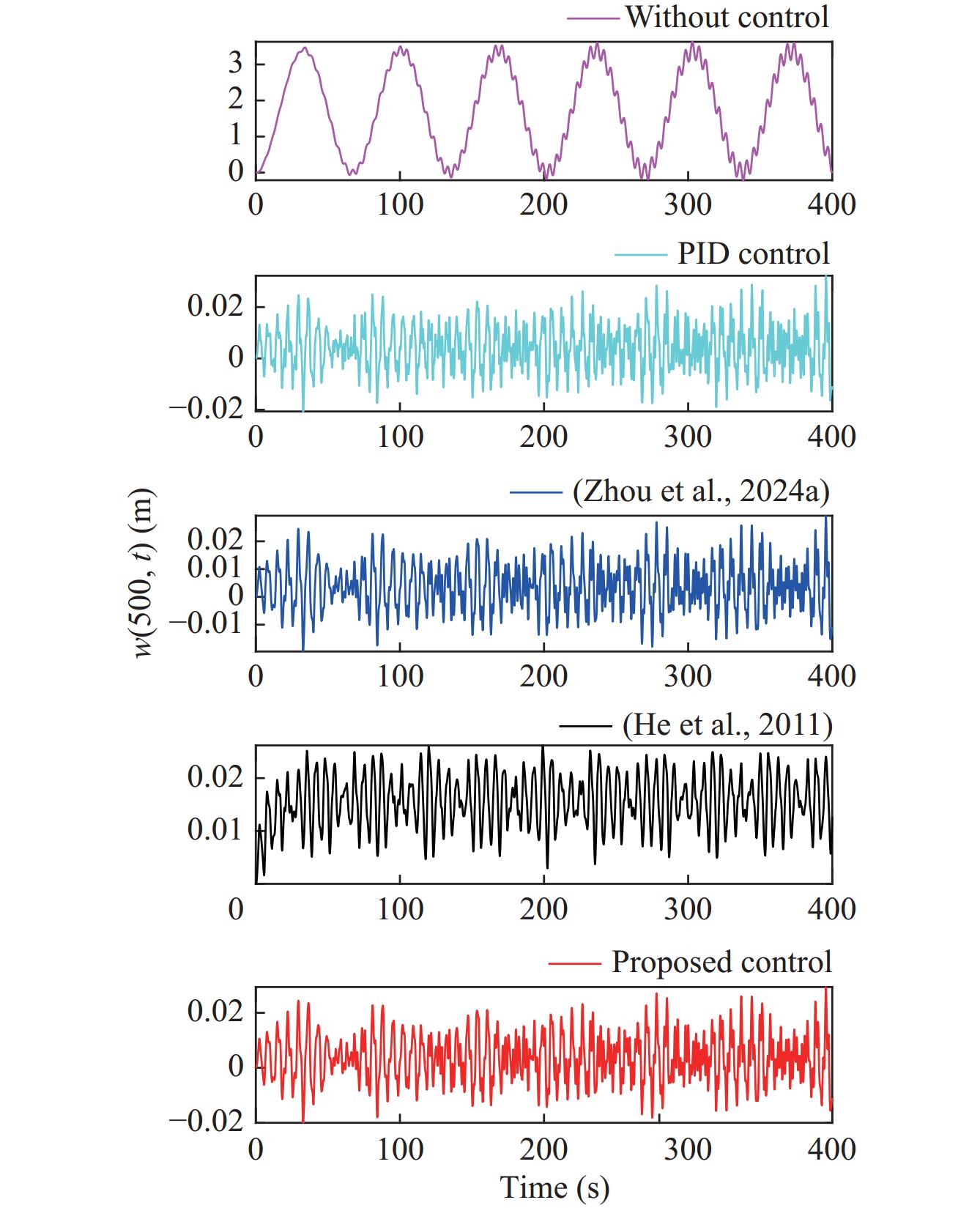
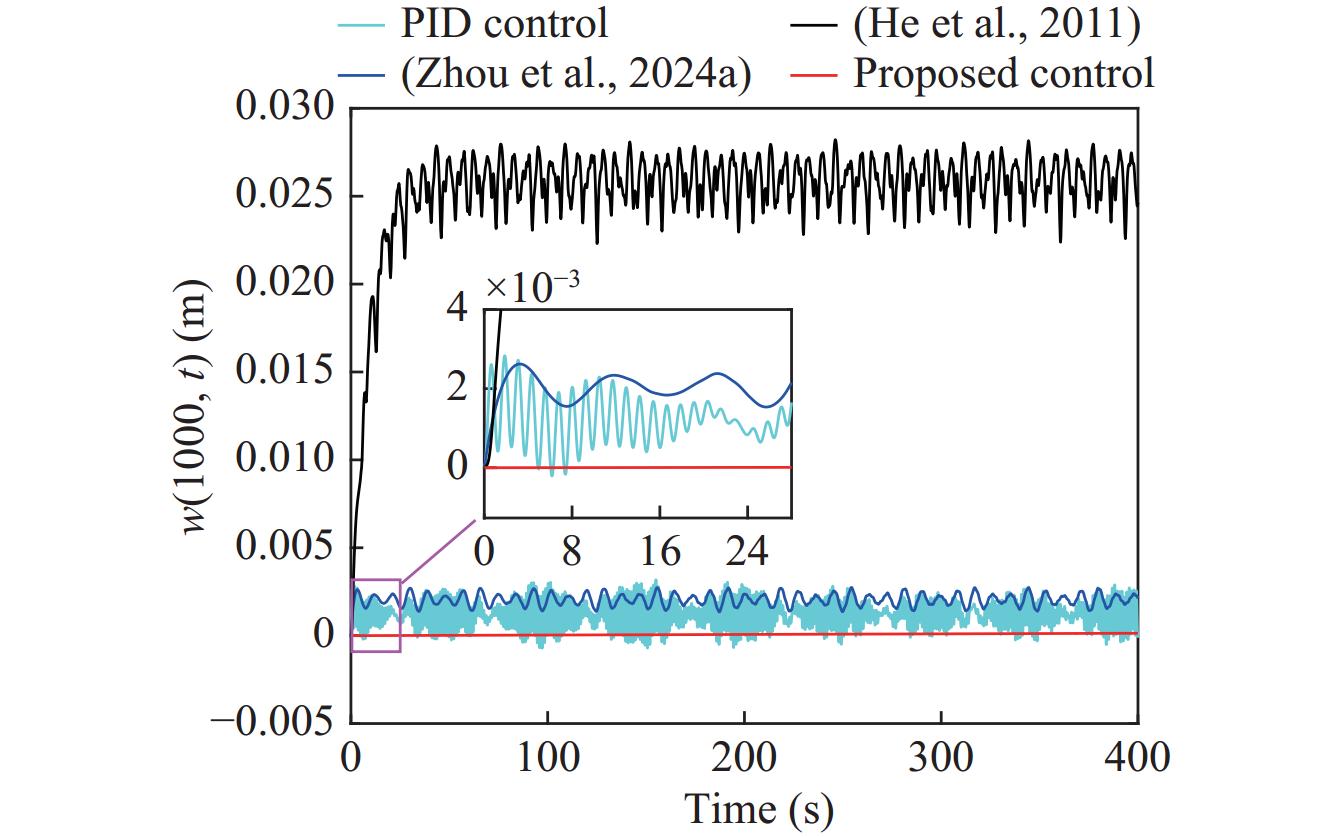
This study examines the adaptive boundary control problem of flexible marine riser with internal flow coupling. The dynamic model of the flexible marine riser system with internal flow coupling is derived using the Hamiltonian principle. An analysis of internal flow’s influence on the vibration characteristics of flexible marine risers is conducted. Then, for the uncertain environmental disturbance, the adaptive fuzzy logic system is introduced to dynamically approximate the boundary disturbance, and a robust adaptive fuzzy boundary control is proposed. The uniform boundedness of the closed-loop system is proved based on Lyapunov theory. The well-posedness of the closed-loop system is proved by operator semigroup theory. The proposed control’s effectiveness is validated through comparison with existing control methods.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 941 -955
doi: 10.1007/s13344-025-0074-x
[Abstract](0)
Abstract:
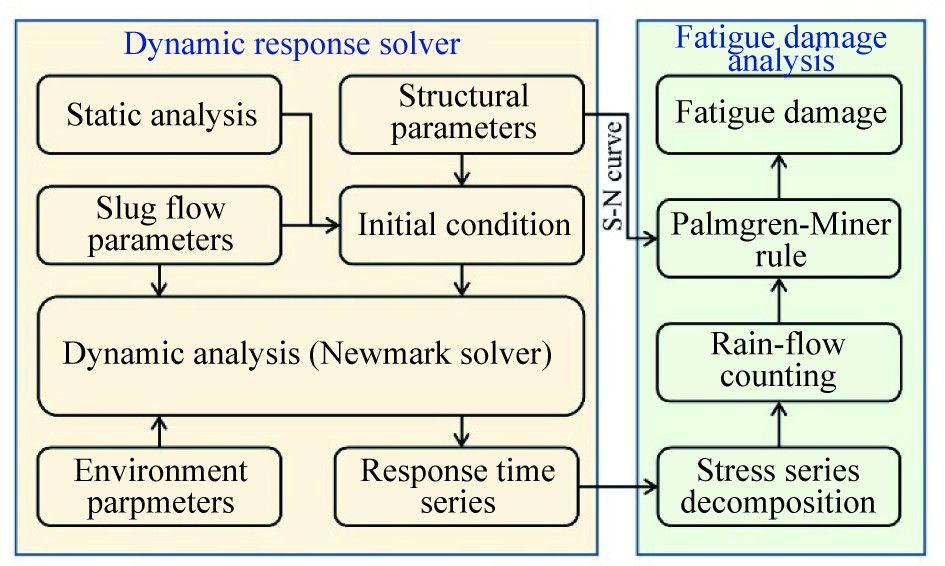
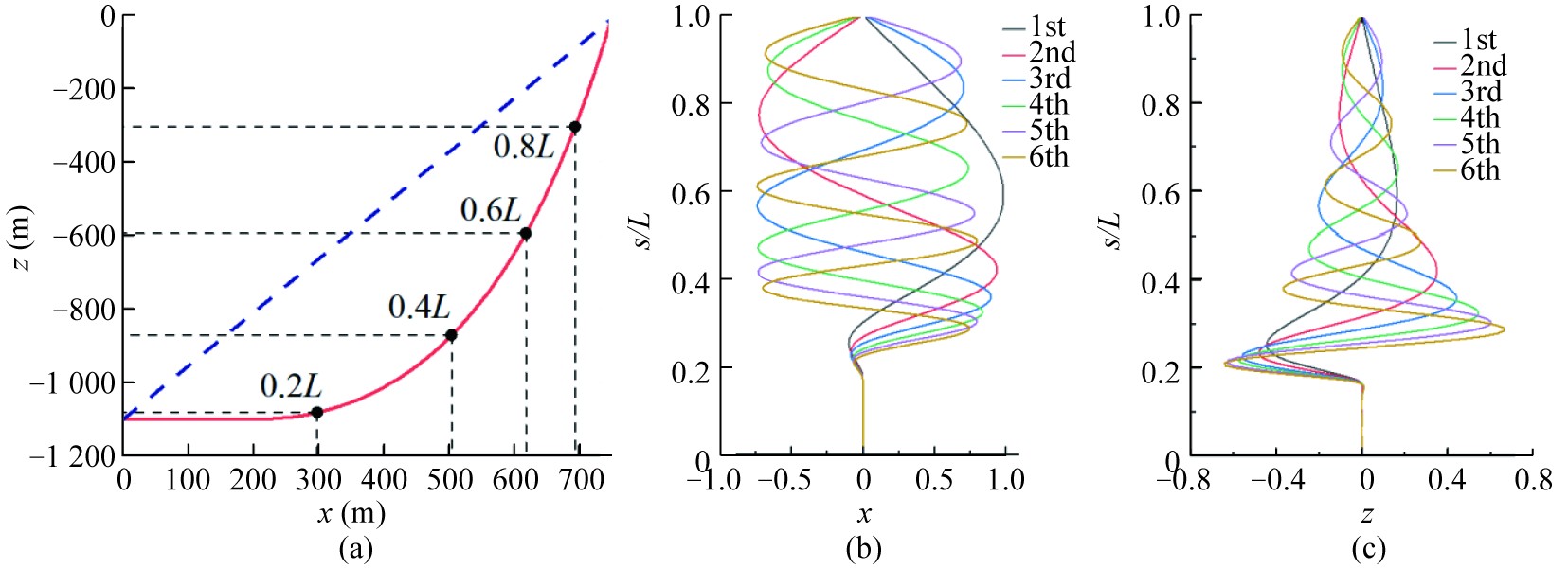
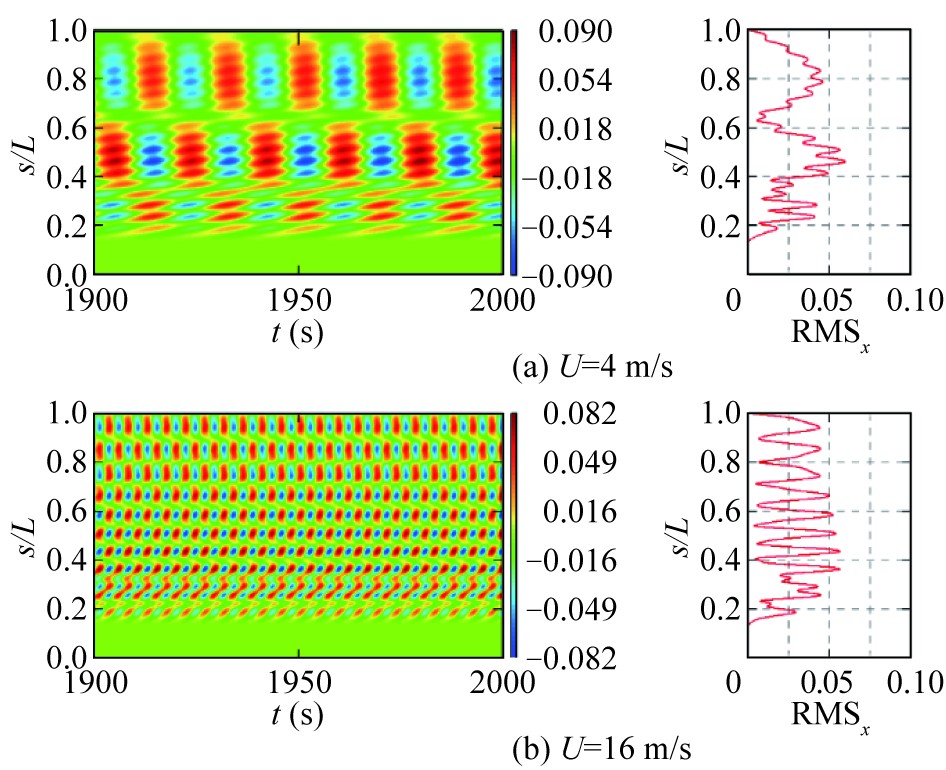
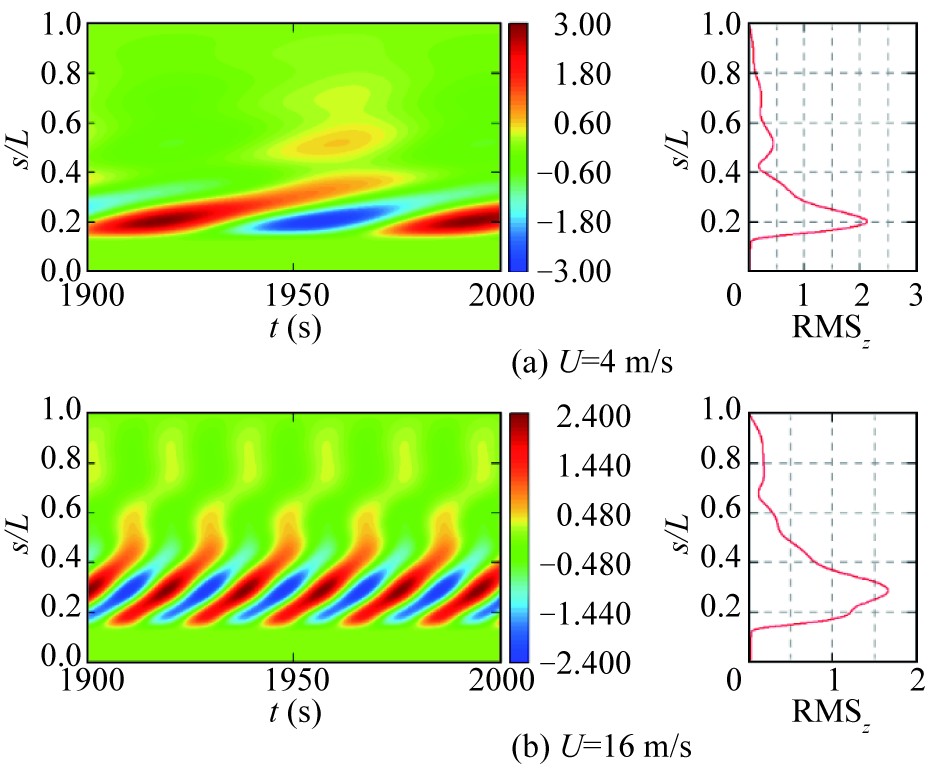
This study examines the slug-induced vibration (SIV) response and fatigue behavior of offshore risers subjected to internal slug flow. A structural model incorporating internal slug flow dynamics is developed using the Absolute Nodal Coordinate Formulation (ANCF) and a spatial-temporal density variation equation to analyze how slug flow parameters affect the SIV response of risers. Structural displacement, stress, and fatigue responses are systematically evaluated to characterize the structural behavior under SIV conditions. Longer slugs induce more pronounced traveling wave characteristics, while shorter slugs facilitate a mixed traveling-standing wave mode. Moreover, higher slug frequencies lead to increased fatigue accumulation, especially over an extended touchdown zone, thereby compromising the structural integrity of the riser. The findings yield valuable insights into the dynamic interactions between slug flow and riser response. This research advances the understanding of SIV mechanisms and provides a theoretical foundation for fatigue assessment and structural optimization, contributing to the safe and efficient design of offshore risers in deepwater environments.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 956 -970
doi: 10.1007/s13344-025-0075-9
[Abstract](0)
Abstract:
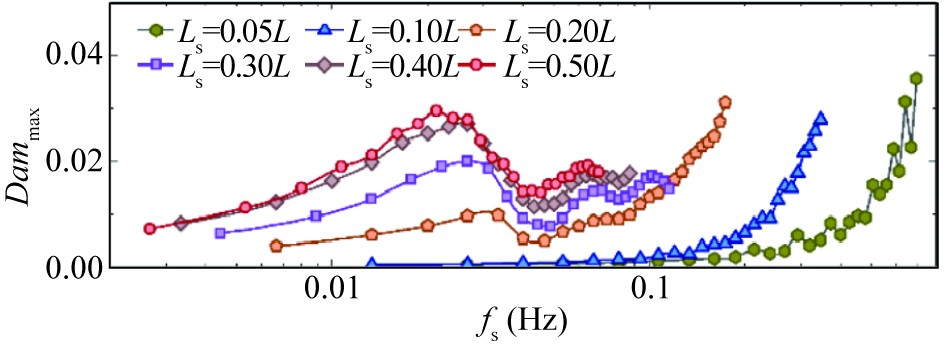
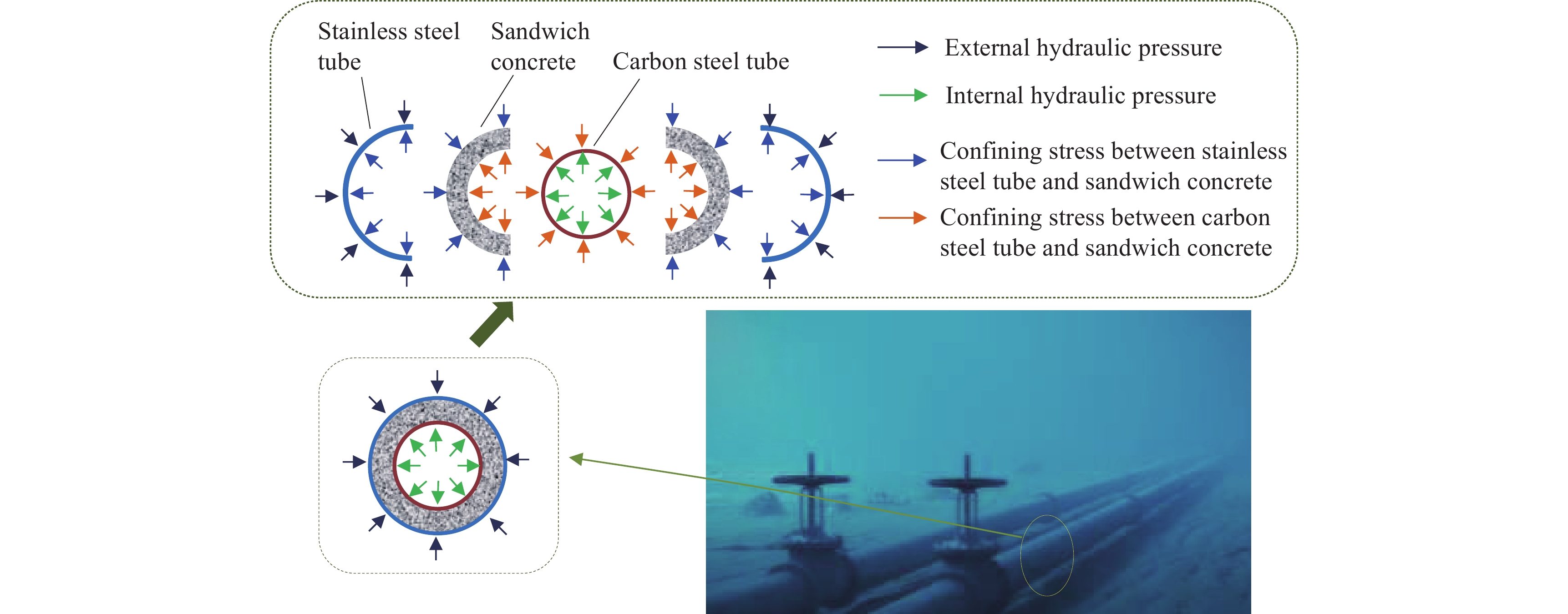
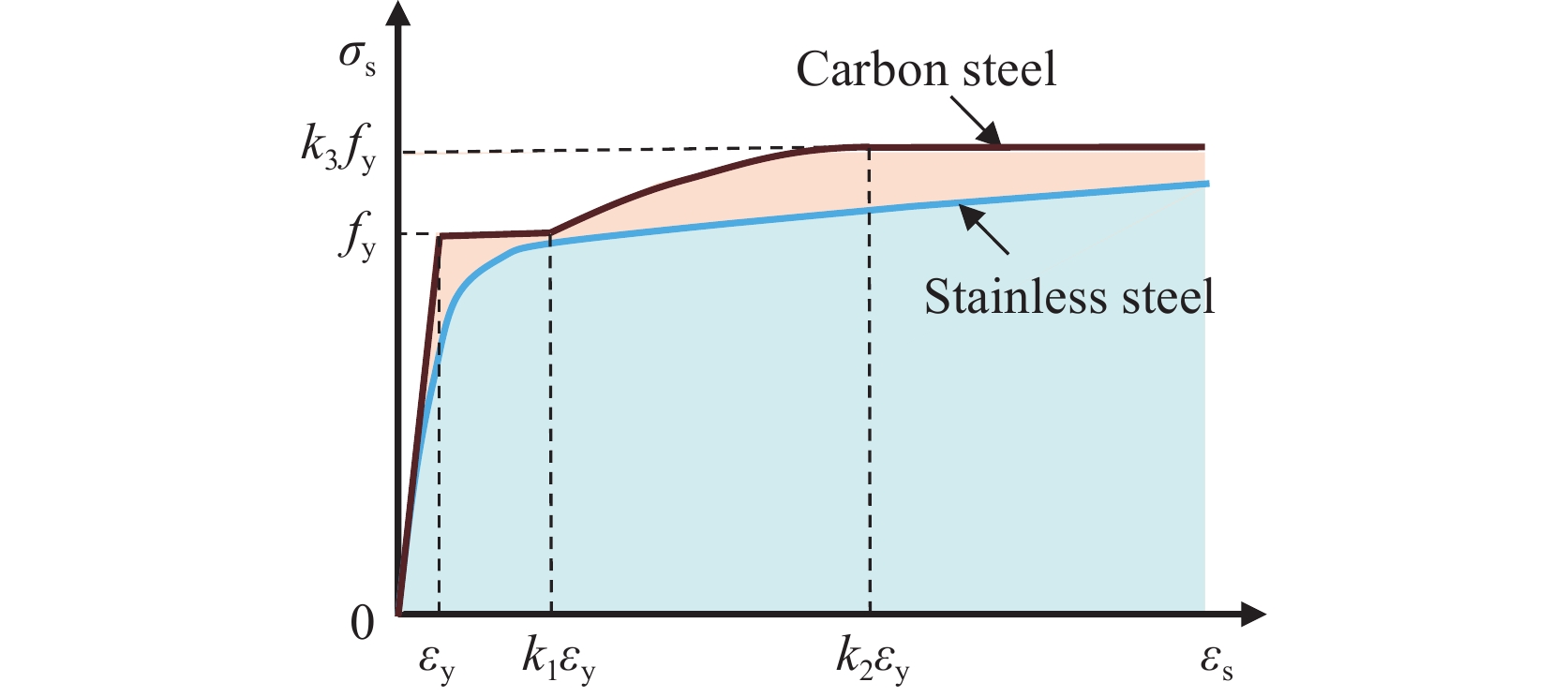
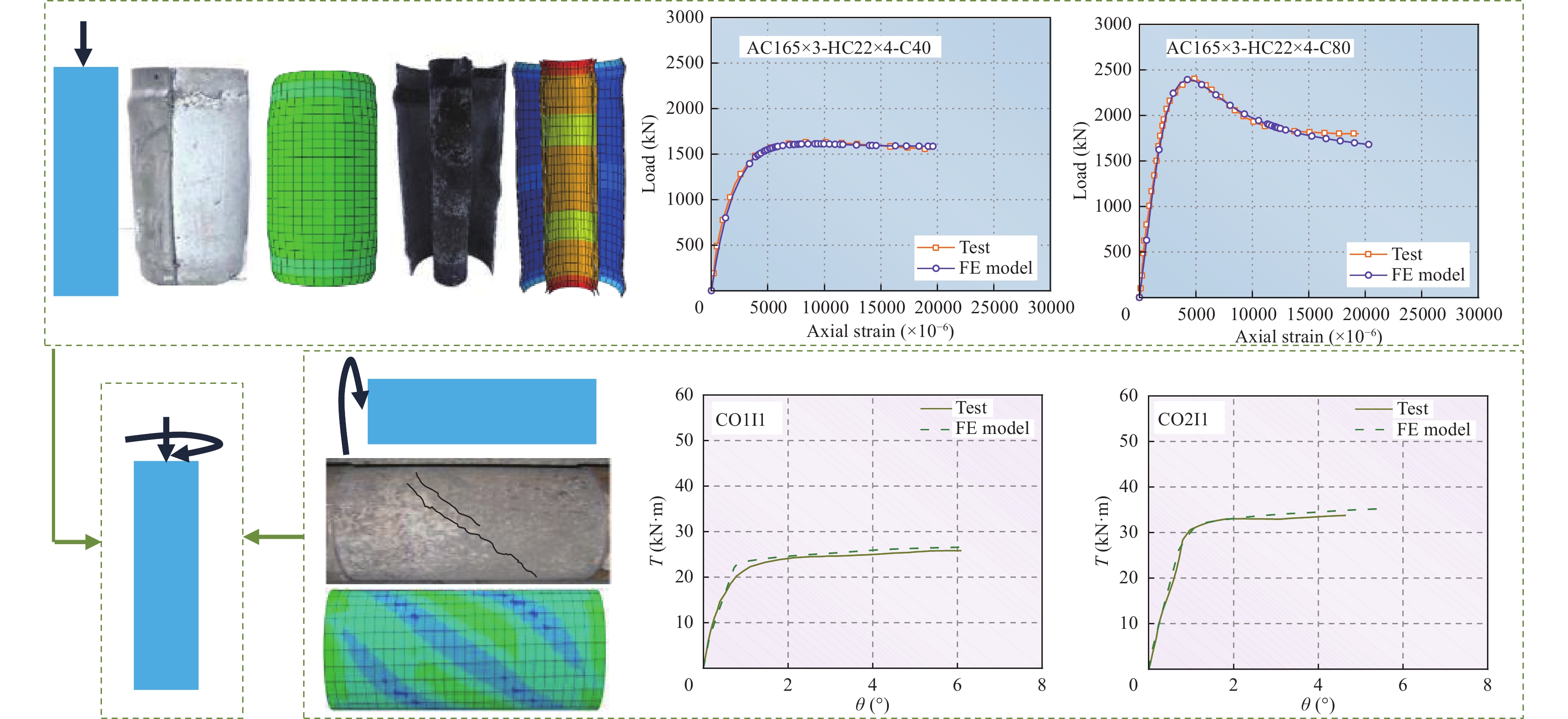
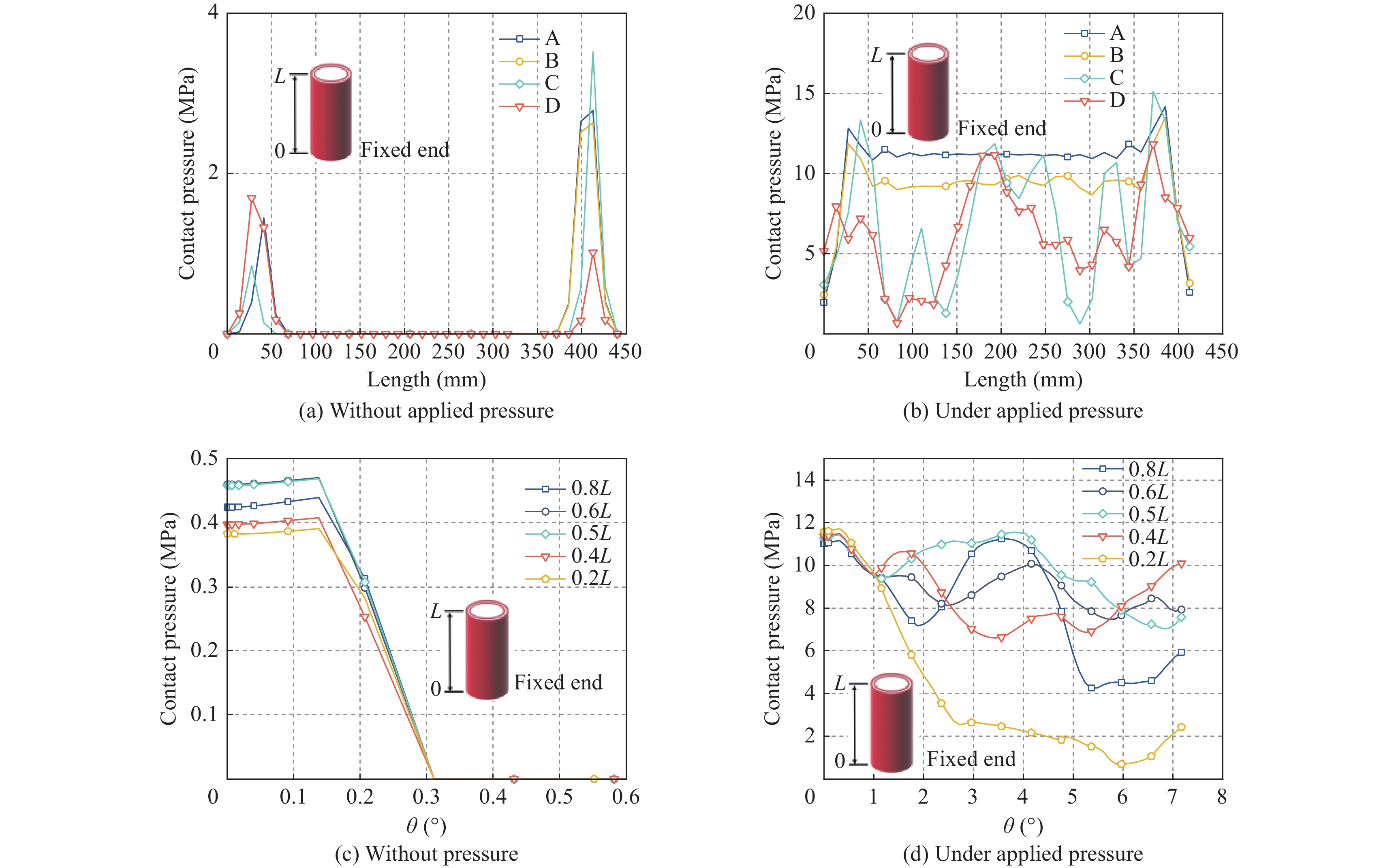
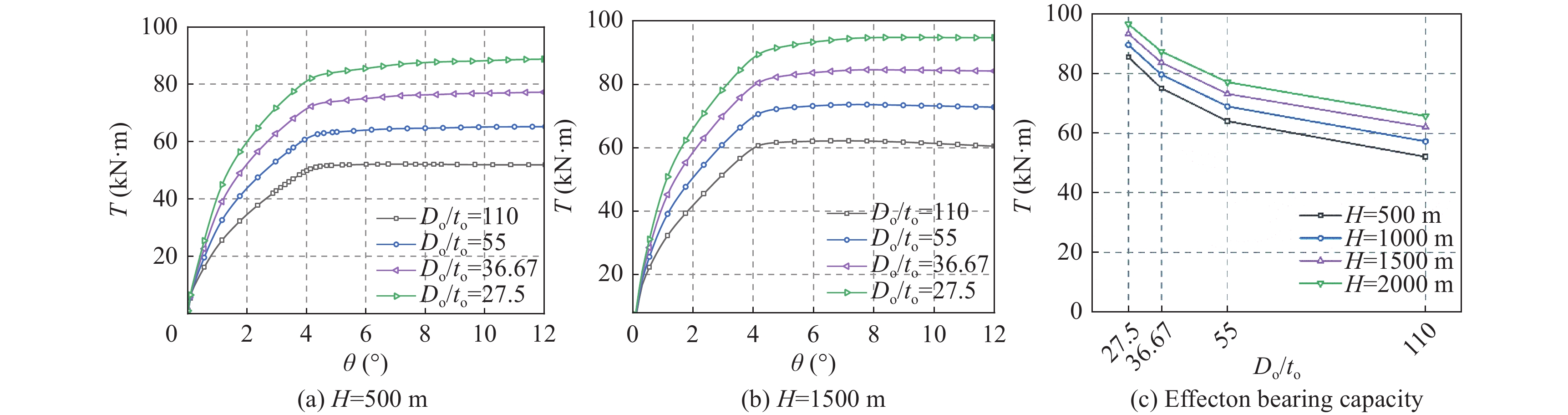
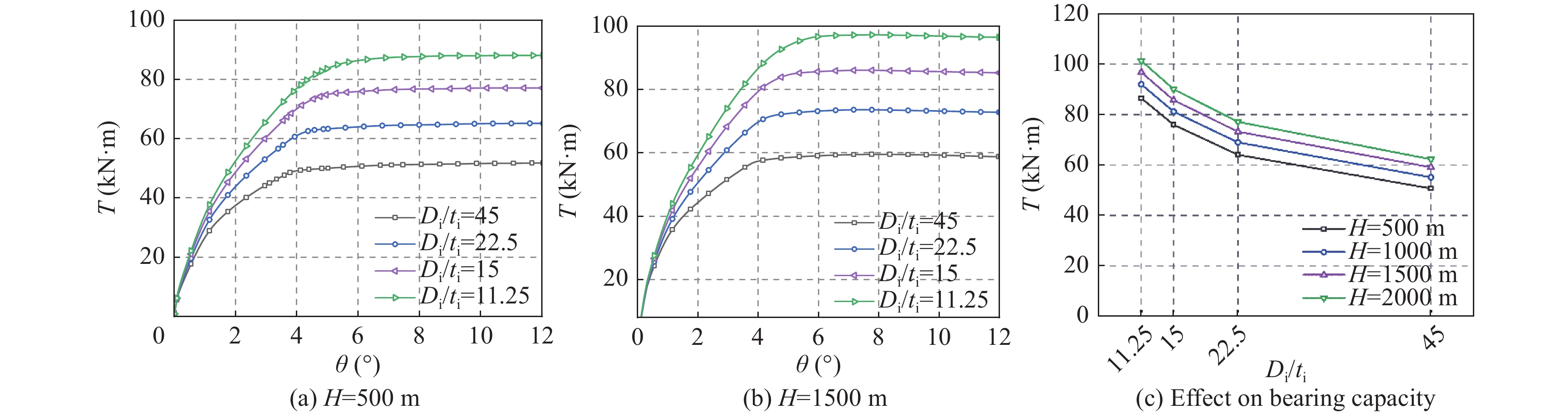
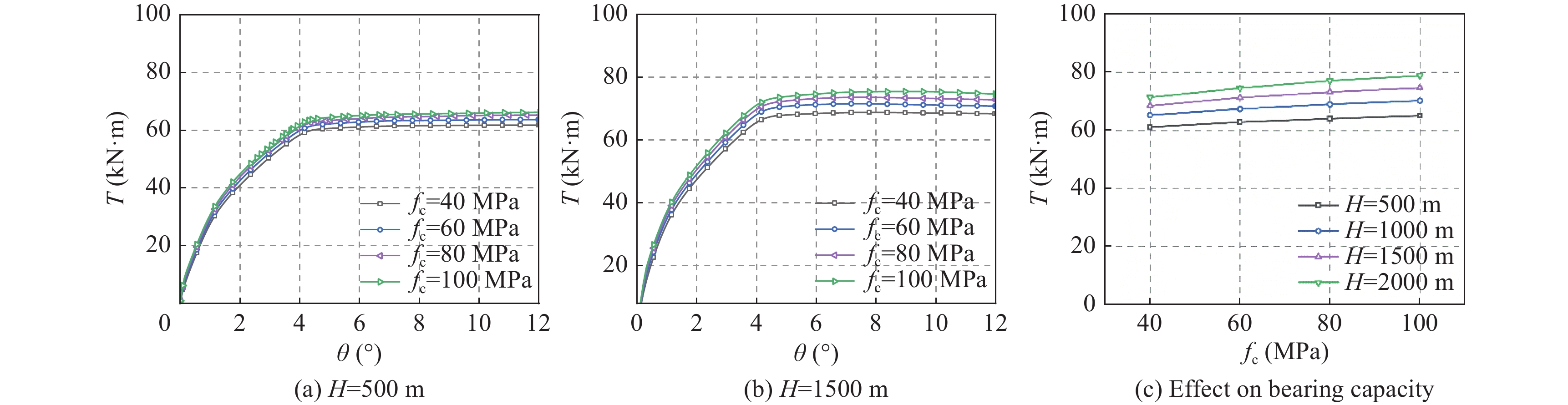
The recently developed SCCDS composite tube, a novel variant of the pipe-in-pipe (PIP) structure, demonstrates strong potential for subsea pipeline applications. However, theoretical research regarding its structural behavior under compression-torsion loading and bearing capacity calculations remains limited, particularly concerning the influence of dual hydraulic pressures during operation. This study examines the impact of dual hydraulic pressures on the compressive-torsional behavior of SCCDS composite tubes. A finite element (FE) model was developed and validated against experimental results, comparing failure modes, full-range loading curves, and bearing capacity to elucidate the working mechanism under dual pressures. A parametric study was then conducted to examine the effects of geometric-physical parameters. Results demonstrate that dual pressures substantially enhance the bearing capacity of sandwich concrete by increasing the normal contact stress at the interface. Increasing concrete strength (fc) provides minimal enhancement to torsional resistance compared to the yielding strengths of outer tube (fyo) and inner tube (fyi). Higher diameter-to-thickness ratios of outer tube (Do/to) and inner tube (Di/ti) significantly reduce torsional capacity. At 1000 m water depth, increasing the Do/to ratio from 27.5 to 36.67, 55, and 110 reduces bearing capacity by 11.17%, 23.08%, and 36.14% respectively. Strict measures should be implemented to prevent substantial reductions in strength and ductility for SCCDS composite tubes with large hollow ratios (e.g., χ=0.849) or high axial compression ratios (e.g., n=0.8). The study proposes a modified calculation method for determining N-T curves that incorporates dual hydraulic pressure effects, providing guidance for performance evaluation of novel SCCDS composite tubes in deep-sea engineering.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
2025, 39(5): 971 -983
doi: 10.1007/s13344-025-0073-y
[Abstract](0)
Abstract:
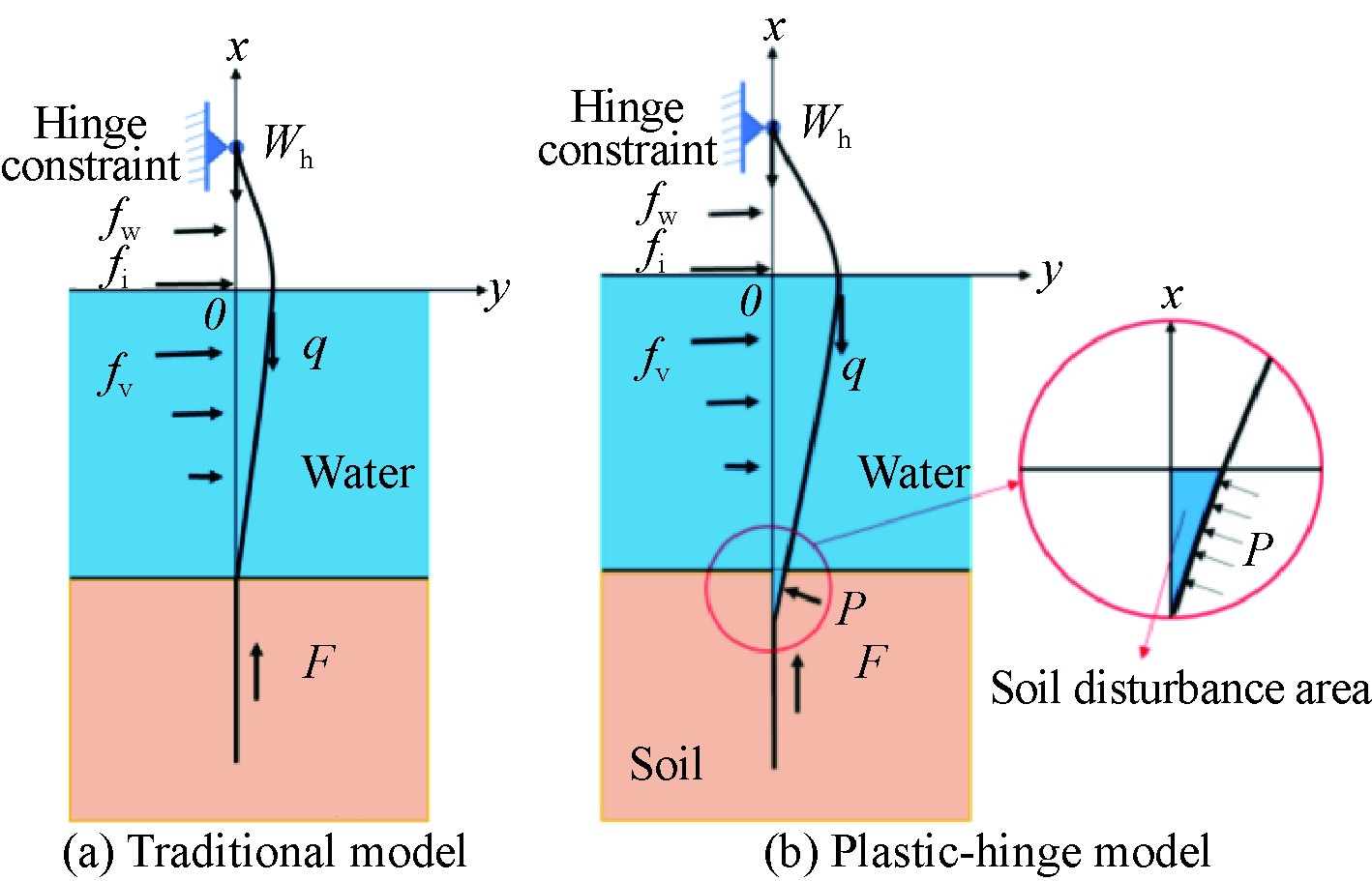
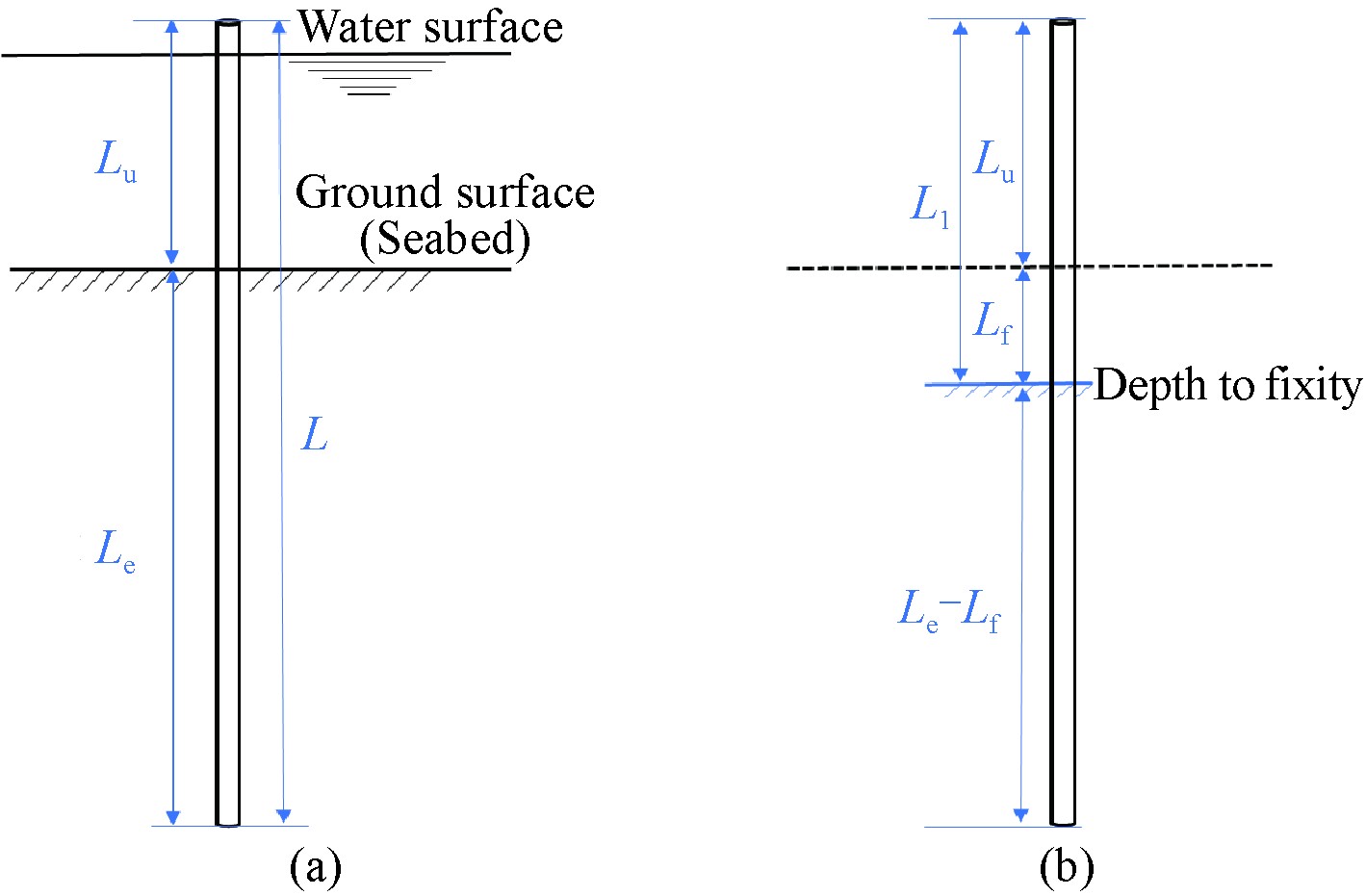
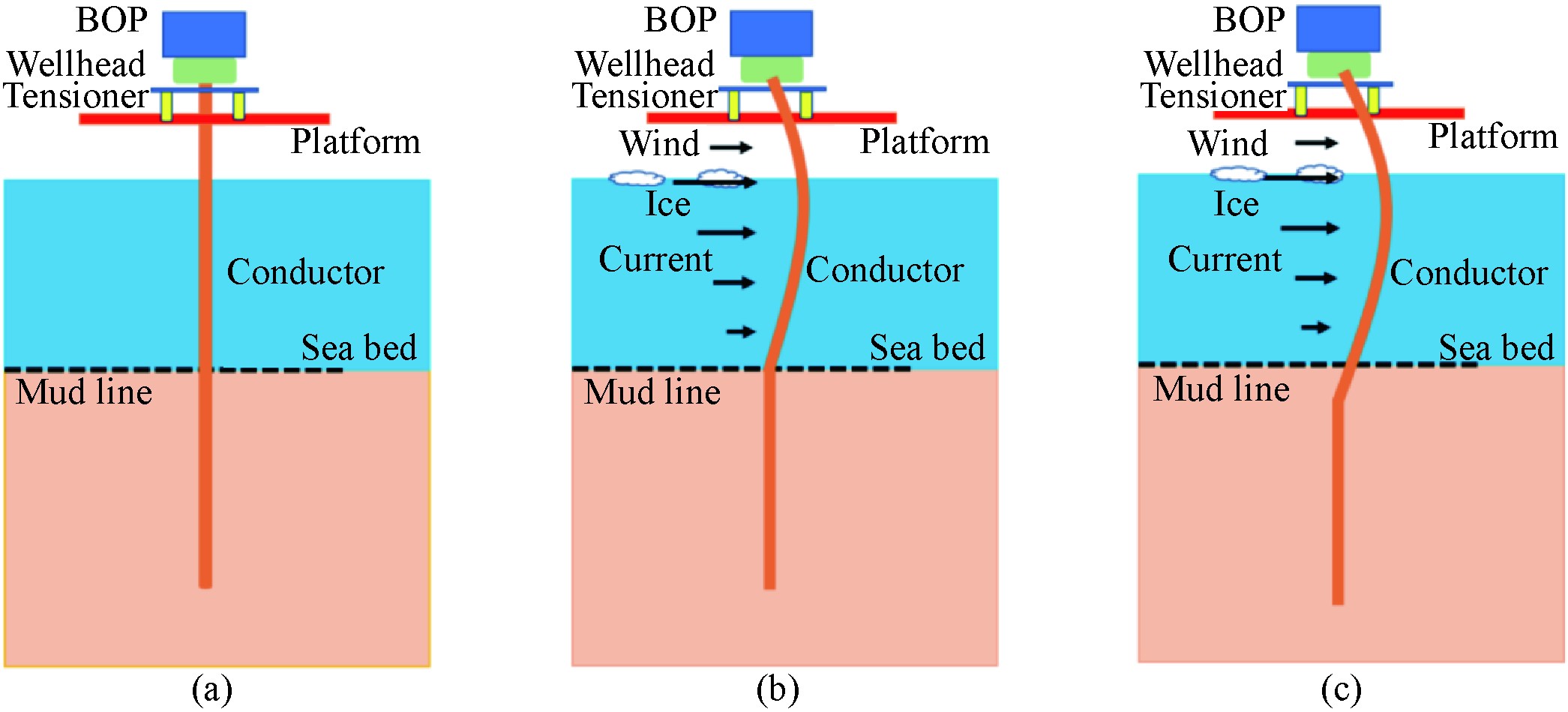
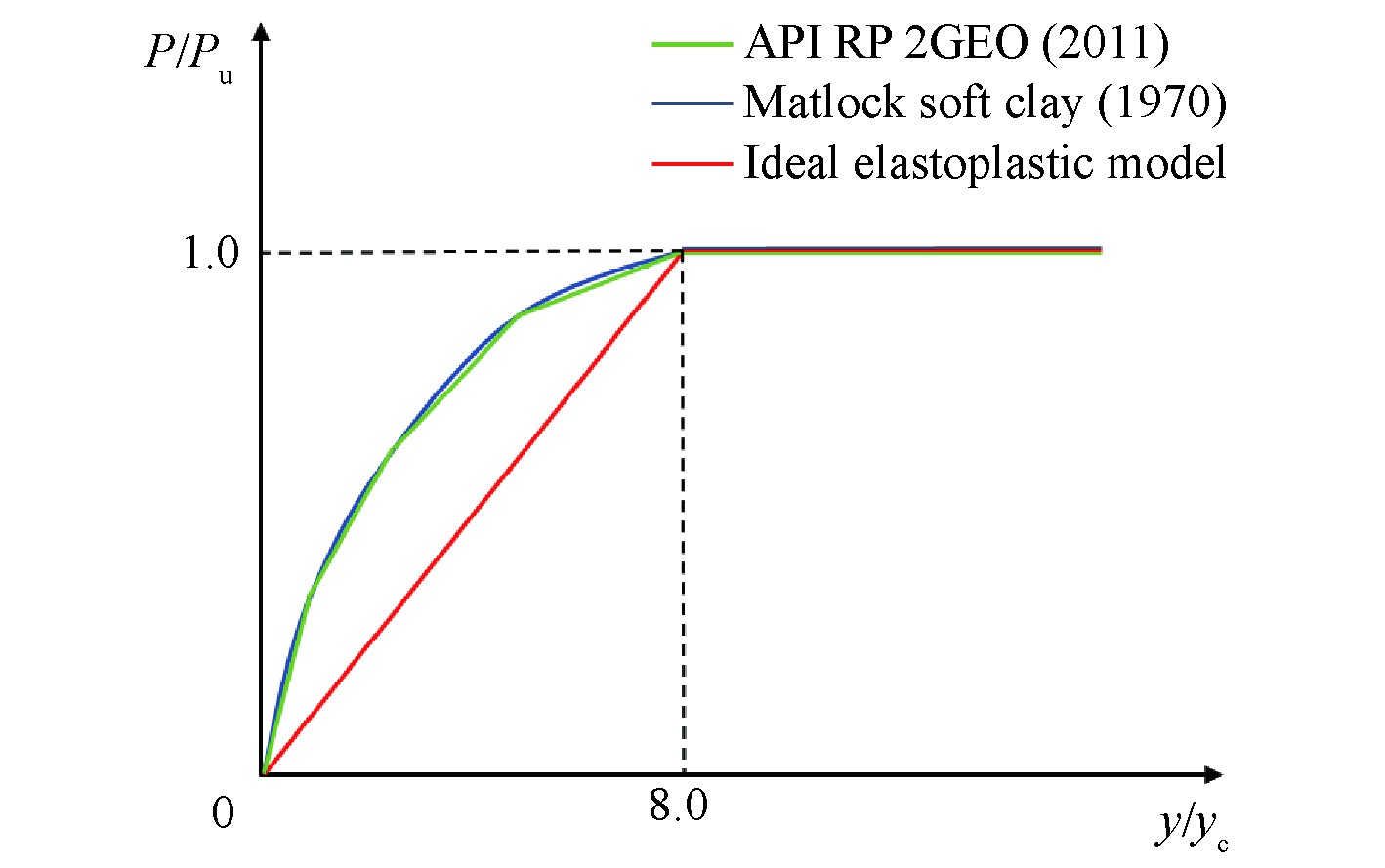
With increasing water depth, marine drilling conductors exhibit higher slenderness ratios, significantly reducing their resistance to environmental loads in Arctic waters. These conductors, when subjected to combined wind, current, and ice loads, may experience substantial horizontal displacements and bending moments, potentially compromising offshore operational safety and wellhead stability. Additionally, soil disturbance near the mudline diminishes the conductor’s bearing capacity, potentially rendering it inadequate for wellhead support and increasing operational risks. This study introduces a static analysis model based on plastic hinge theory to evaluate conductor survivability. The conductor analysis divides the structure into three segments: above waterline, submerged, and embedded below mudline. An idealized elastic-plastic p-y curve model characterizes soil behavior beneath the mudline, while the finite difference method (FDM) analyzes the conductor’s mechanical response under complex pile-head boundary conditions. Numerical simulations using ABAQUS validate the plastic hinge approach against conventional methods, confirming its accuracy in predicting structural performance. These results provide valuable insights for optimizing installation depths and bearing capacity designs of marine drilling conductors in ice-prone regions.
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
-
![]()
Display Method:
Display Method: |
2025, 39(5): 793 -805
doi: 10.1007/s13344-025-0062-1
[Abstract](0)
Abstract:
Mitigating vortex-induced vibrations (VIV) in flexible risers represents a critical concern in offshore oil and gas production, considering its potential impact on operational safety and efficiency. The accurate prediction of displacement and position of VIV in flexible risers remains challenging under actual marine conditions. This study presents a data-driven model for riser displacement prediction that corresponds to field conditions. Experimental data analysis reveals that the XGBoost algorithm predicts the maximum displacement and position with superior accuracy compared with Support vector regression (SVR), considering both computational efficiency and precision. Platform displacement in the Y-direction demonstrates a significant positive correlation with both axial depth and maximum displacement magnitude. The fourth point displacement exhibits the highest contribution to model prediction outcomes, showing a positive influence on maximum displacement while negatively affecting the axial depth of maximum displacement. Platform displacement in the X- and Y-directions exhibits competitive effects on both the riser’s maximum displacement and its axial depth. Through the implementation of XGBoost algorithm and SHapley Additive exPlanation (SHAP) analysis, the model effectively estimates the riser’s maximum displacement and its precise location. This data-driven approach achieves predictions using minimal, readily available data points, enhancing its practical field applications and demonstrating clear relevance to academic and professional communities.
Mitigating vortex-induced vibrations (VIV) in flexible risers represents a critical concern in offshore oil and gas production, considering its potential impact on operational safety and efficiency. The accurate prediction of displacement and position of VIV in flexible risers remains challenging under actual marine conditions. This study presents a data-driven model for riser displacement prediction that corresponds to field conditions. Experimental data analysis reveals that the XGBoost algorithm predicts the maximum displacement and position with superior accuracy compared with Support vector regression (SVR), considering both computational efficiency and precision. Platform displacement in the Y-direction demonstrates a significant positive correlation with both axial depth and maximum displacement magnitude. The fourth point displacement exhibits the highest contribution to model prediction outcomes, showing a positive influence on maximum displacement while negatively affecting the axial depth of maximum displacement. Platform displacement in the X- and Y-directions exhibits competitive effects on both the riser’s maximum displacement and its axial depth. Through the implementation of XGBoost algorithm and SHapley Additive exPlanation (SHAP) analysis, the model effectively estimates the riser’s maximum displacement and its precise location. This data-driven approach achieves predictions using minimal, readily available data points, enhancing its practical field applications and demonstrating clear relevance to academic and professional communities.


2025, 39(5): 806 -821
doi: 10.1007/s13344-025-0063-0
[Abstract](0)
Abstract:
A deep-sea mining riser is a crucial component of the system used to lift seafloor mineral resources to the vessel. It is prone to damage and failure because of harsh environmental conditions and internal fluid erosion. Furthermore, damage can impact the response characteristics of the riser, but varying environmental loadings easily mask it. Thus, distinguishing between riser damage and environmental effects poses a considerable challenge. To address this issue, a cantilevered model is created for a deep-sea mining riser via the concentrated mass method, and a time-domain analytical strategy is developed. The vortex-induced vibration (VIV) response characteristics of the riser are initially examined, considering various damage conditions and flow velocities. The study results revealed four primary observations: (a) effective tension can serve as a reliable indicator for identifying damage at lower velocities; (b) there are noticeable differences in displacement between the healthy and damaged risers in the in-line direction rather than the cross-flow direction; (c) frequency characteristics can more effectively distinguish the damage conditions at high flow velocities, with the mean square frequency and frequency variance being more effective than the centroid frequency and root variance frequency; (d) displacement differences are more sensitive to damage occurring near the top and bottom of the riser, while both velocity variations and structural damage can influence displacements, especially in regions between modal nodes. The vibrational behavior and damage indicators are clarified for structural health monitoring of deep-sea mining risers during lifting operations.
A deep-sea mining riser is a crucial component of the system used to lift seafloor mineral resources to the vessel. It is prone to damage and failure because of harsh environmental conditions and internal fluid erosion. Furthermore, damage can impact the response characteristics of the riser, but varying environmental loadings easily mask it. Thus, distinguishing between riser damage and environmental effects poses a considerable challenge. To address this issue, a cantilevered model is created for a deep-sea mining riser via the concentrated mass method, and a time-domain analytical strategy is developed. The vortex-induced vibration (VIV) response characteristics of the riser are initially examined, considering various damage conditions and flow velocities. The study results revealed four primary observations: (a) effective tension can serve as a reliable indicator for identifying damage at lower velocities; (b) there are noticeable differences in displacement between the healthy and damaged risers in the in-line direction rather than the cross-flow direction; (c) frequency characteristics can more effectively distinguish the damage conditions at high flow velocities, with the mean square frequency and frequency variance being more effective than the centroid frequency and root variance frequency; (d) displacement differences are more sensitive to damage occurring near the top and bottom of the riser, while both velocity variations and structural damage can influence displacements, especially in regions between modal nodes. The vibrational behavior and damage indicators are clarified for structural health monitoring of deep-sea mining risers during lifting operations.


2025, 39(5): 822 -838
doi: 10.1007/s13344-025-0064-z
[Abstract](0)
Abstract:
This work investigated the dynamic behavior of vertical pipes conveying gas-liquid two-phase flow when subjected to external excitations at both ends. Even with minimal excitation amplitude, resonance can occur when the excitation frequency aligns with the natural frequency of the pipe, significantly increasing the degree of operational risk. The governing equation of motion based on the Euler-Bernoulli beam is derived for the relative deflection with stationary simply supported ends, with the effects of the external excitations represented by source terms distributed along the pipe length. The fourth-order partial differential equation is solved via the generalized integral transform technique (GITT), with the solution successfully verified via comparison with results in the literature. A comprehensive analysis of the vibration phenomena and changes in the motion state of the pipe is conducted for three classes of external excitation conditions: same frequency and amplitude (SFSA), same frequency but different amplitudes (SFDA), and different frequencies and amplitudes (DFDA). The numerical results show that with increasing gas volume fraction, the position corresponding to the maximum vibration displacement shifts upward. Compared with conditions without external excitation, the vibration displacement of the pipe conveying two-phase flow under external excitation increases significantly. The frequency of external excitation has a significant effect on the dynamic behavior of a pipe conveying two-phase flow.
This work investigated the dynamic behavior of vertical pipes conveying gas-liquid two-phase flow when subjected to external excitations at both ends. Even with minimal excitation amplitude, resonance can occur when the excitation frequency aligns with the natural frequency of the pipe, significantly increasing the degree of operational risk. The governing equation of motion based on the Euler-Bernoulli beam is derived for the relative deflection with stationary simply supported ends, with the effects of the external excitations represented by source terms distributed along the pipe length. The fourth-order partial differential equation is solved via the generalized integral transform technique (GITT), with the solution successfully verified via comparison with results in the literature. A comprehensive analysis of the vibration phenomena and changes in the motion state of the pipe is conducted for three classes of external excitation conditions: same frequency and amplitude (SFSA), same frequency but different amplitudes (SFDA), and different frequencies and amplitudes (DFDA). The numerical results show that with increasing gas volume fraction, the position corresponding to the maximum vibration displacement shifts upward. Compared with conditions without external excitation, the vibration displacement of the pipe conveying two-phase flow under external excitation increases significantly. The frequency of external excitation has a significant effect on the dynamic behavior of a pipe conveying two-phase flow.


2025, 39(5): 839 -854
doi: 10.1007/s13344-025-0065-y
[Abstract](0)
Abstract:
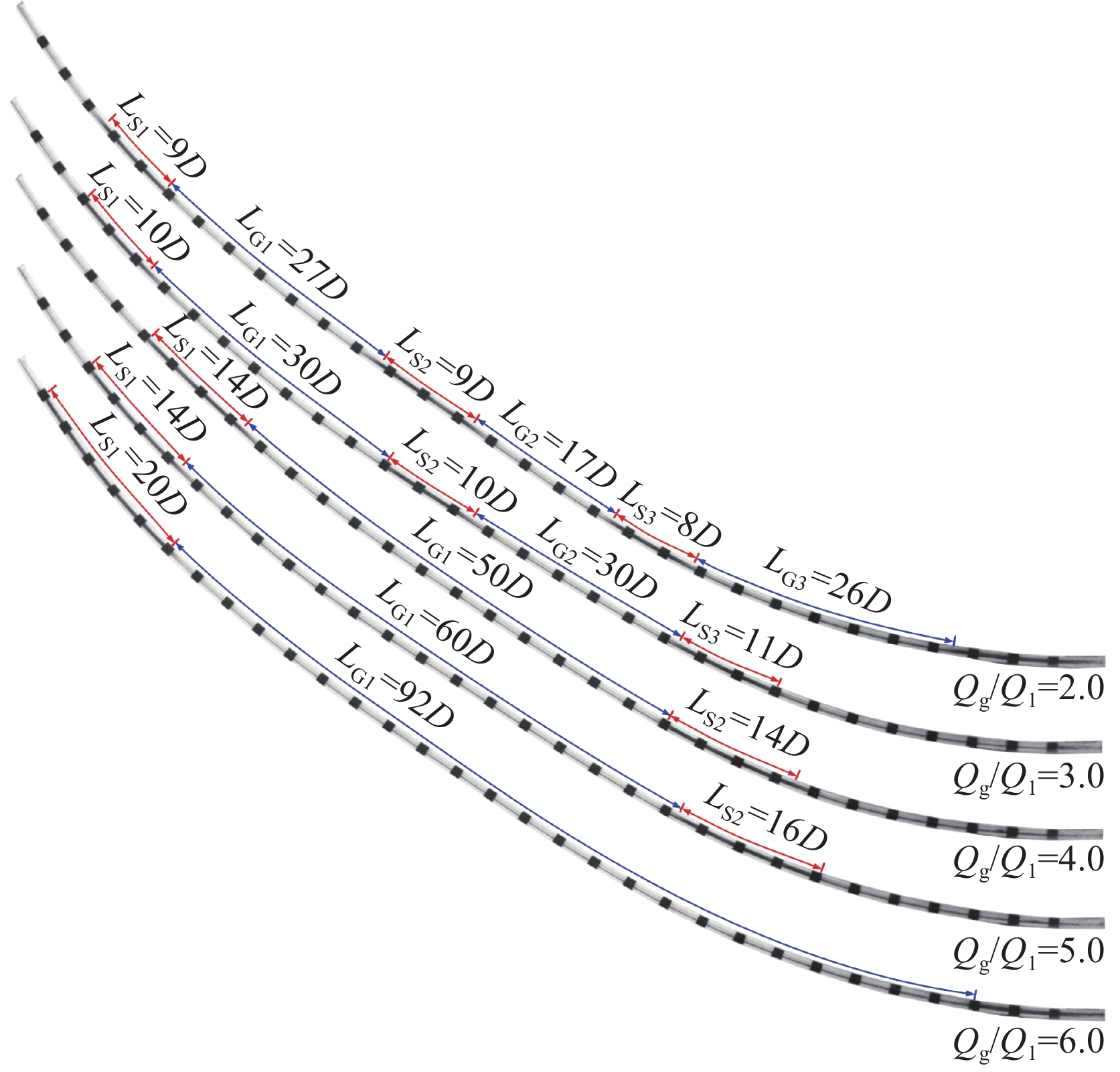
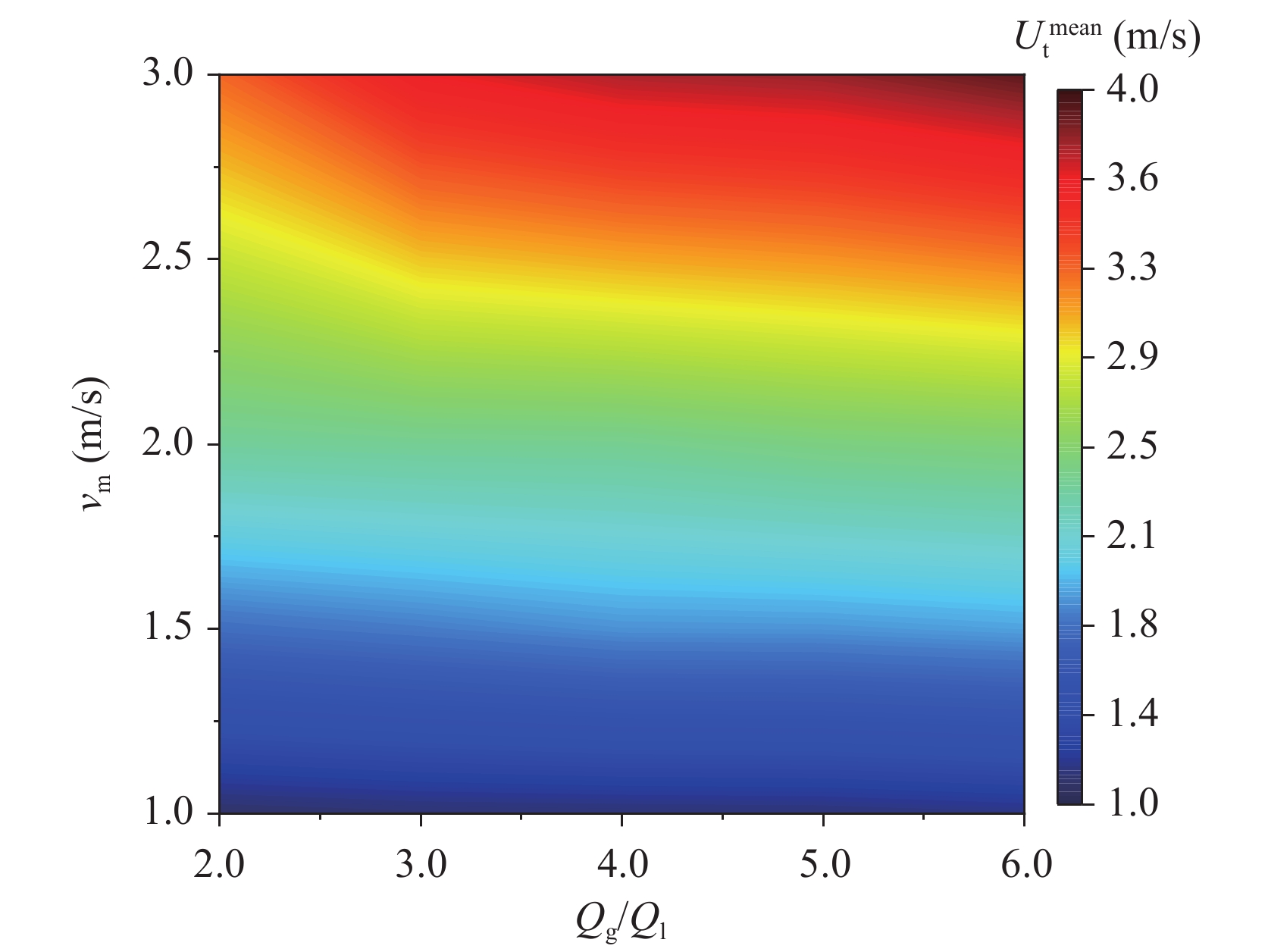
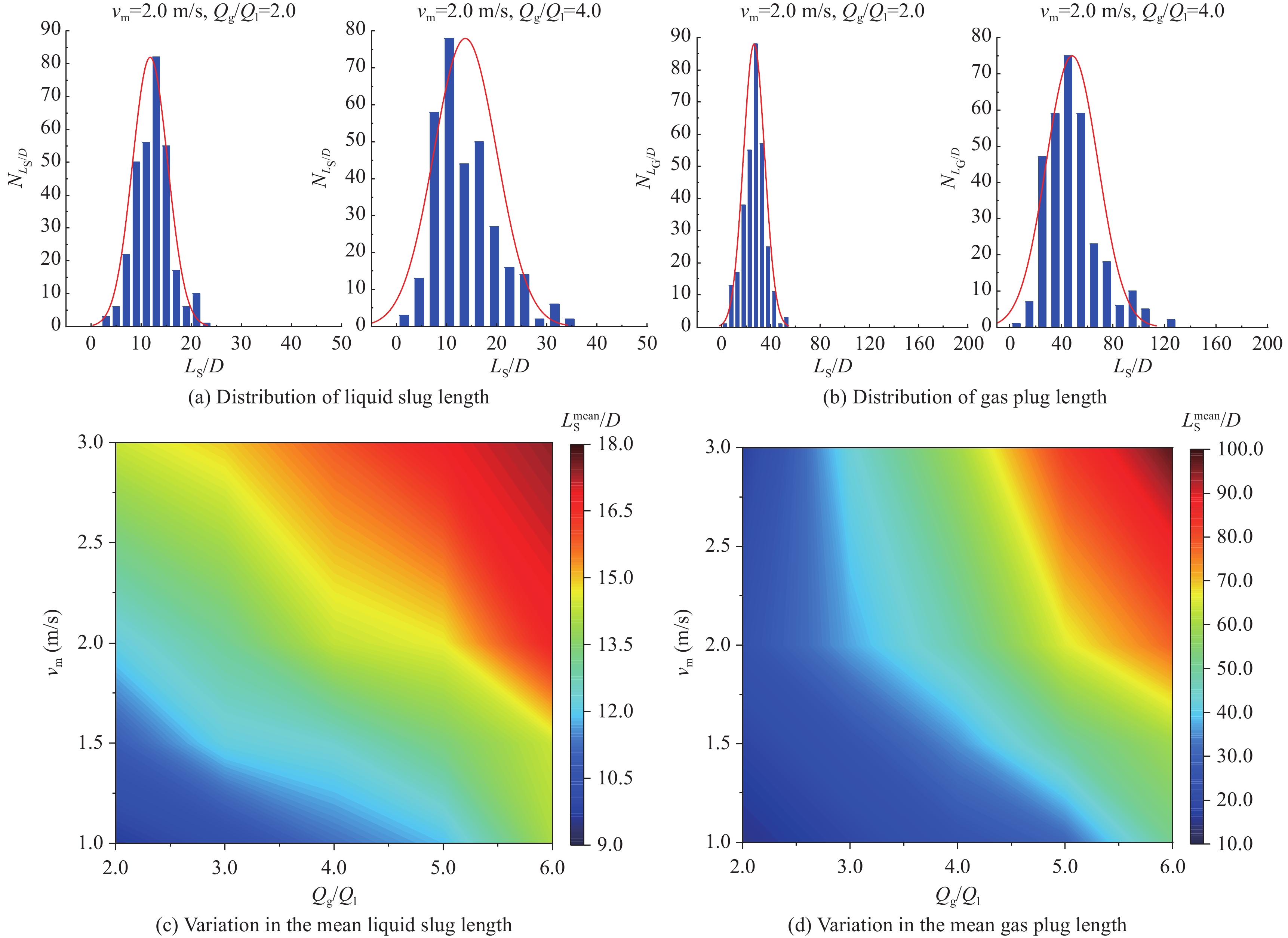
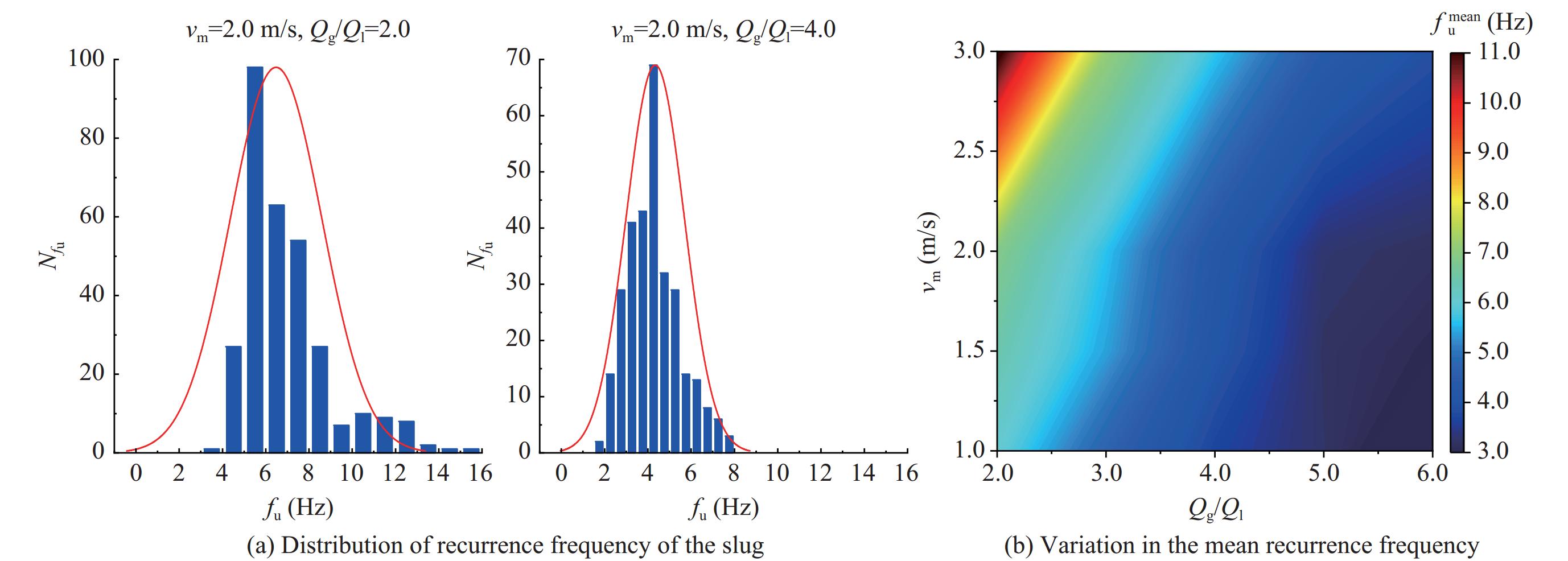
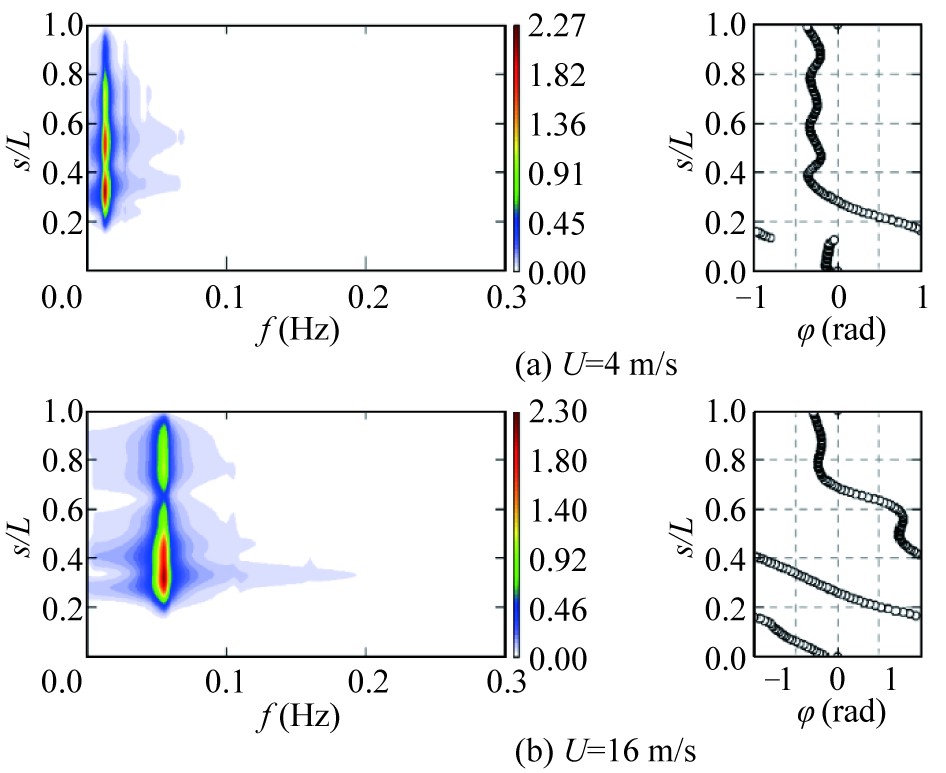
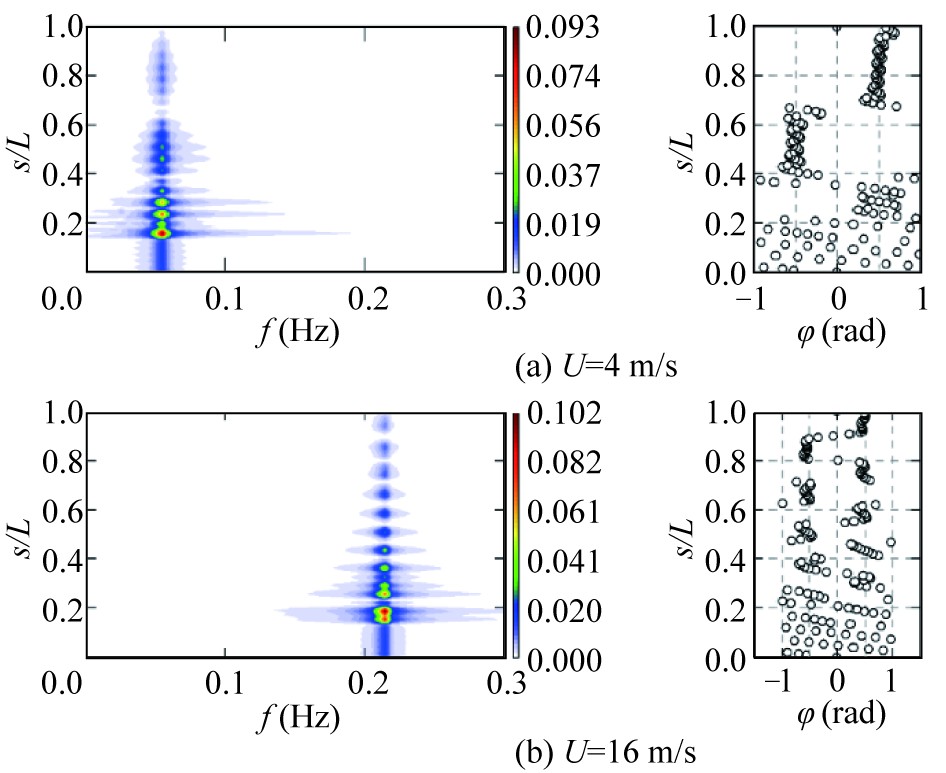
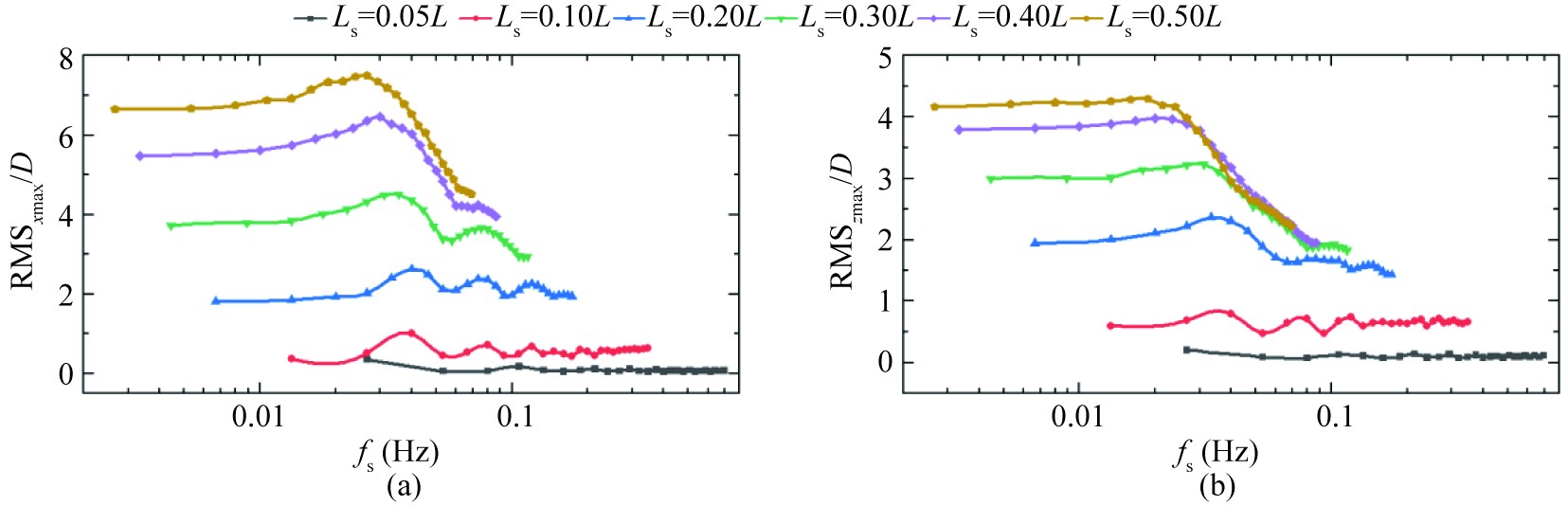
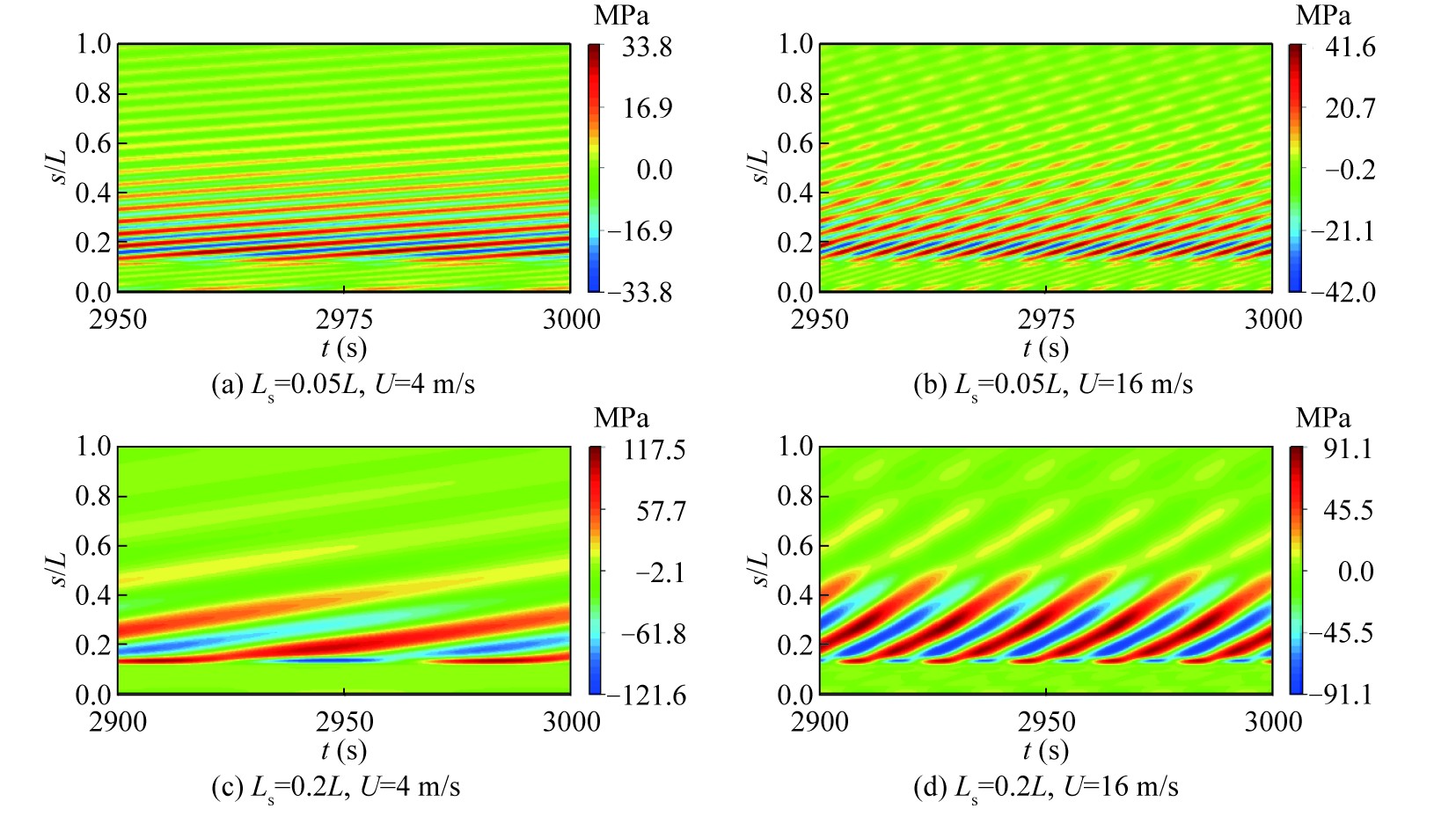
An experimental analysis of the slug-induced vibration (SIV) of a flexible catenary riser with an aspect ratio of 130 is reported in this work. The vibration responses and internal slug flow details at different gas-liquid ratios (Qg/Ql) and mixture velocities (vm) are non-intrusively and simultaneously captured by high-speed cameras. Both the in-plane and out-of-plane responses of the catenary riser are excited in all considered cases. The slug flow characteristics, including translational velocities, slug lengths, recurrence frequencies, and pressure variations, are analyzed and discussed, as are the dynamic responses of the riser in terms of the amplitudes, space-varying frequency, and modal weight. The dominant modal response based on the root-mean-square amplitude profiles does not match that based on the dominant frequency. Three mode switching types are identified based on the RMS amplitude profiles and the dominant frequency. When vm is small, no mode switching (NMS) is observed in either the in-plane or out-of-plane responses. For mode switching I (MS I), the switching between the first and second modes in the in-plane response is induced by slug flow with different recurrence frequencies in cases of large Qg/Ql. However, there is no mode switching in the out-of-plane response. The switching between the first and third modes for the in-plane response and the second and fourth modes for the out-of-plane response (MS II) occurs in cases of relatively high vm and low Qg/Ql.
An experimental analysis of the slug-induced vibration (SIV) of a flexible catenary riser with an aspect ratio of 130 is reported in this work. The vibration responses and internal slug flow details at different gas-liquid ratios (Qg/Ql) and mixture velocities (vm) are non-intrusively and simultaneously captured by high-speed cameras. Both the in-plane and out-of-plane responses of the catenary riser are excited in all considered cases. The slug flow characteristics, including translational velocities, slug lengths, recurrence frequencies, and pressure variations, are analyzed and discussed, as are the dynamic responses of the riser in terms of the amplitudes, space-varying frequency, and modal weight. The dominant modal response based on the root-mean-square amplitude profiles does not match that based on the dominant frequency. Three mode switching types are identified based on the RMS amplitude profiles and the dominant frequency. When vm is small, no mode switching (NMS) is observed in either the in-plane or out-of-plane responses. For mode switching I (MS I), the switching between the first and second modes in the in-plane response is induced by slug flow with different recurrence frequencies in cases of large Qg/Ql. However, there is no mode switching in the out-of-plane response. The switching between the first and third modes for the in-plane response and the second and fourth modes for the out-of-plane response (MS II) occurs in cases of relatively high vm and low Qg/Ql.




2025, 39(5): 855 -865
doi: 10.1007/s13344-025-0066-x
[Abstract](0)
Abstract:
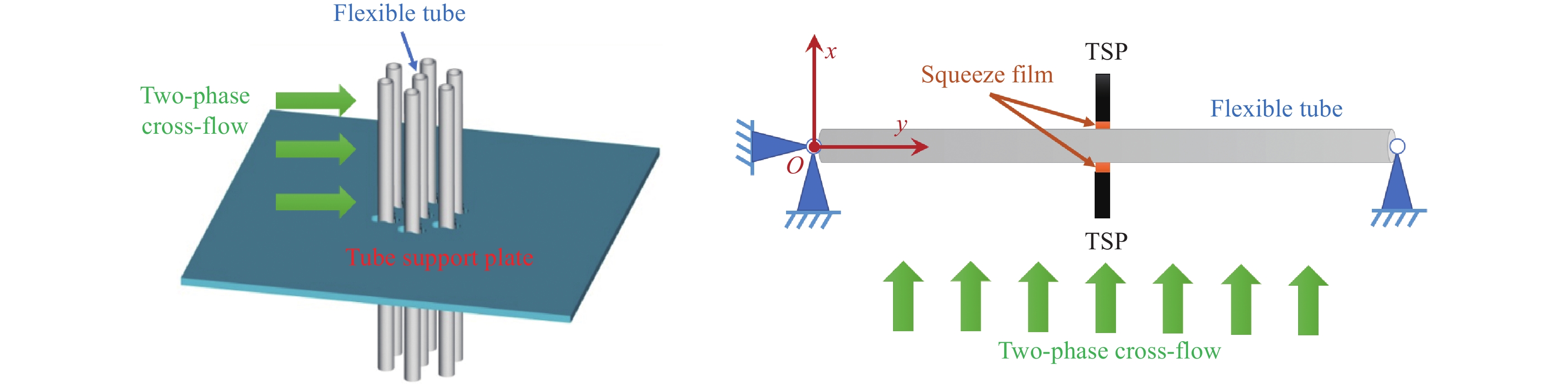
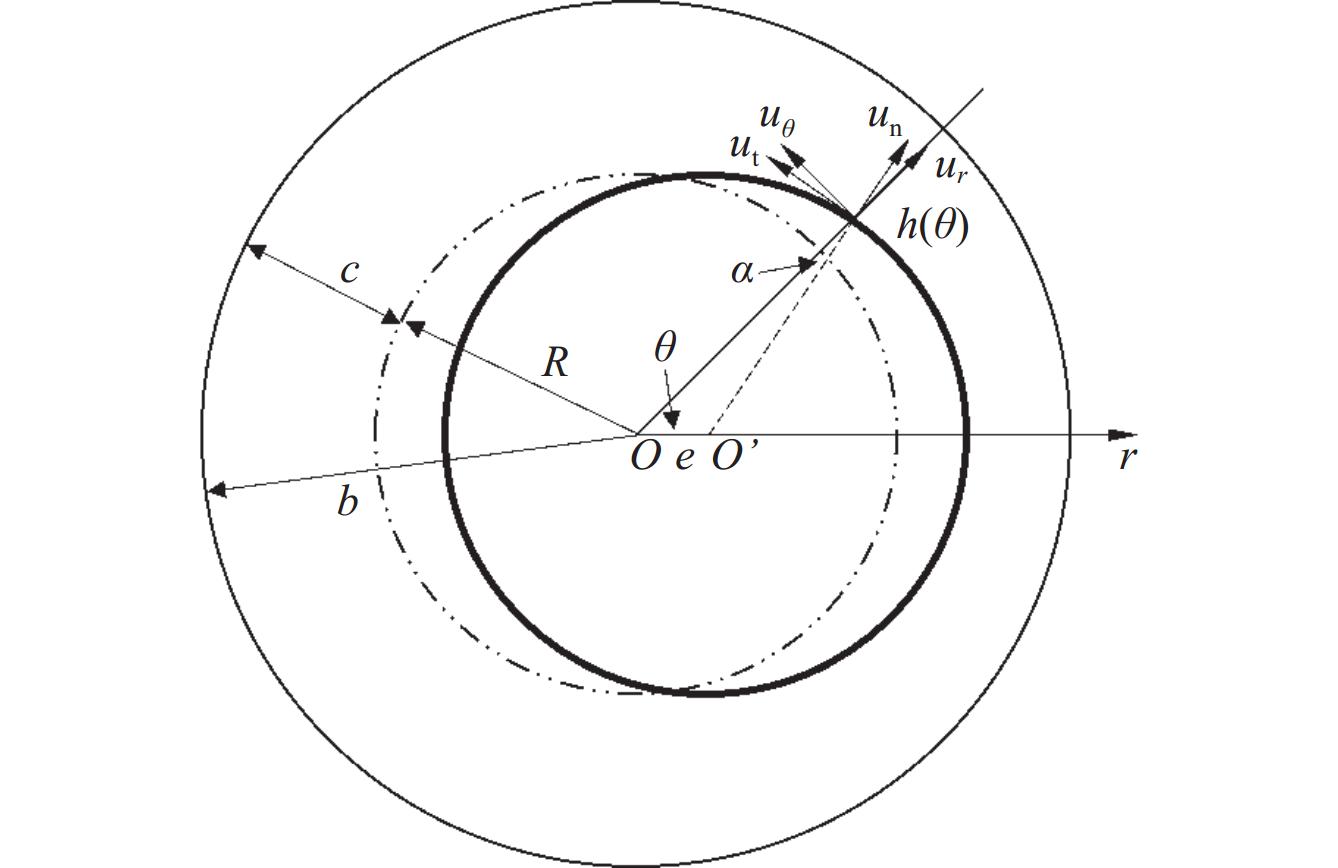
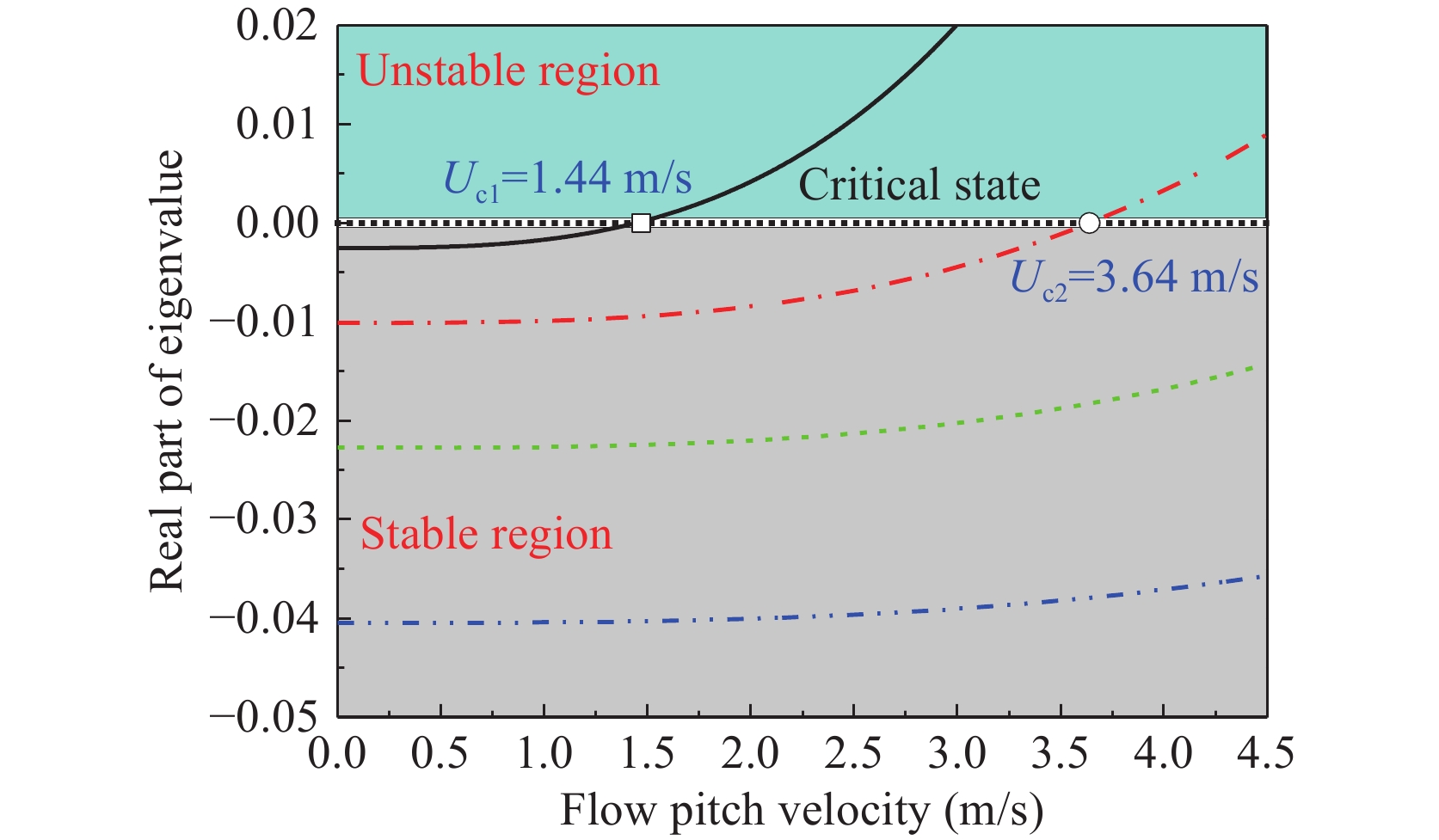
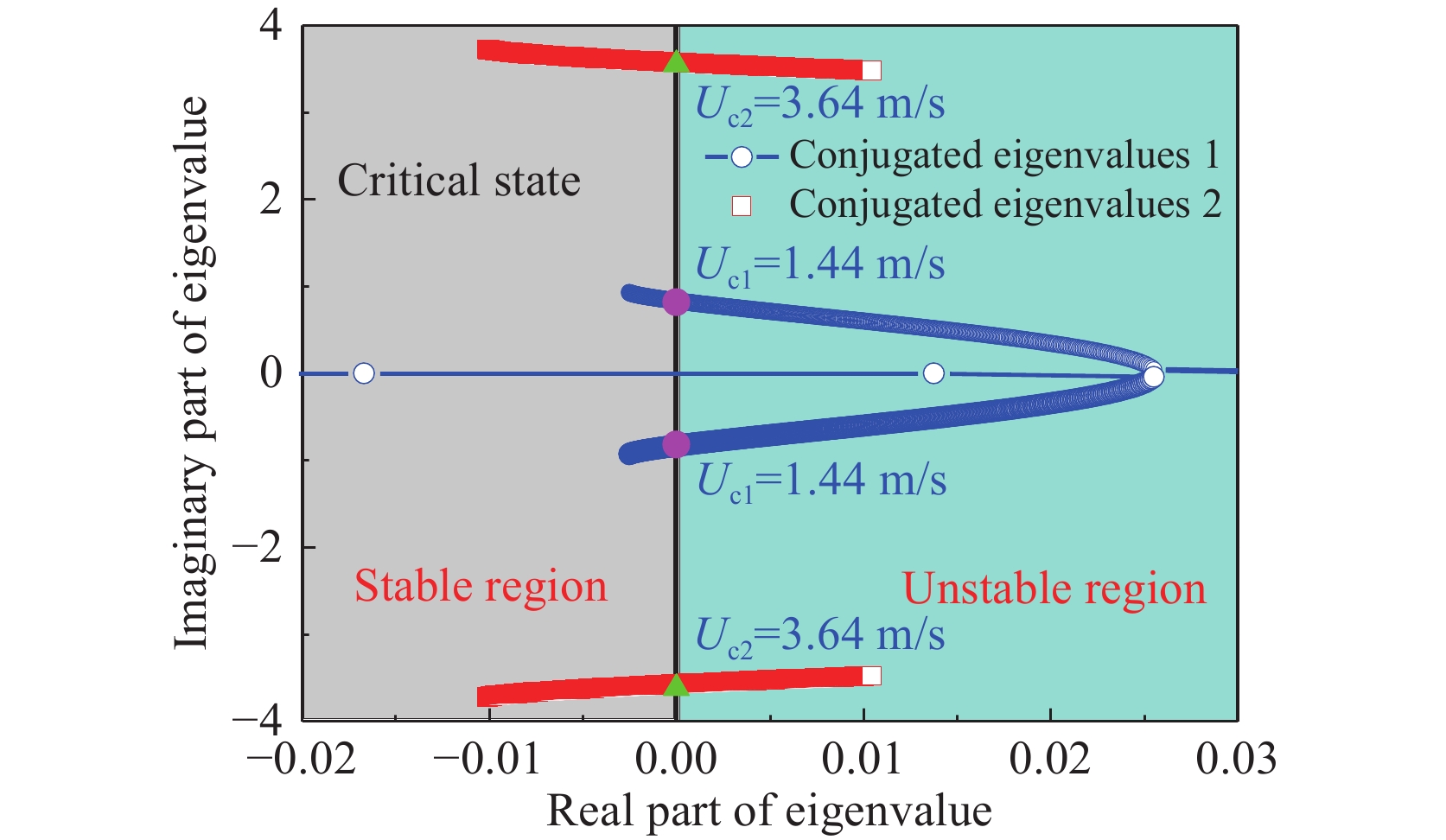
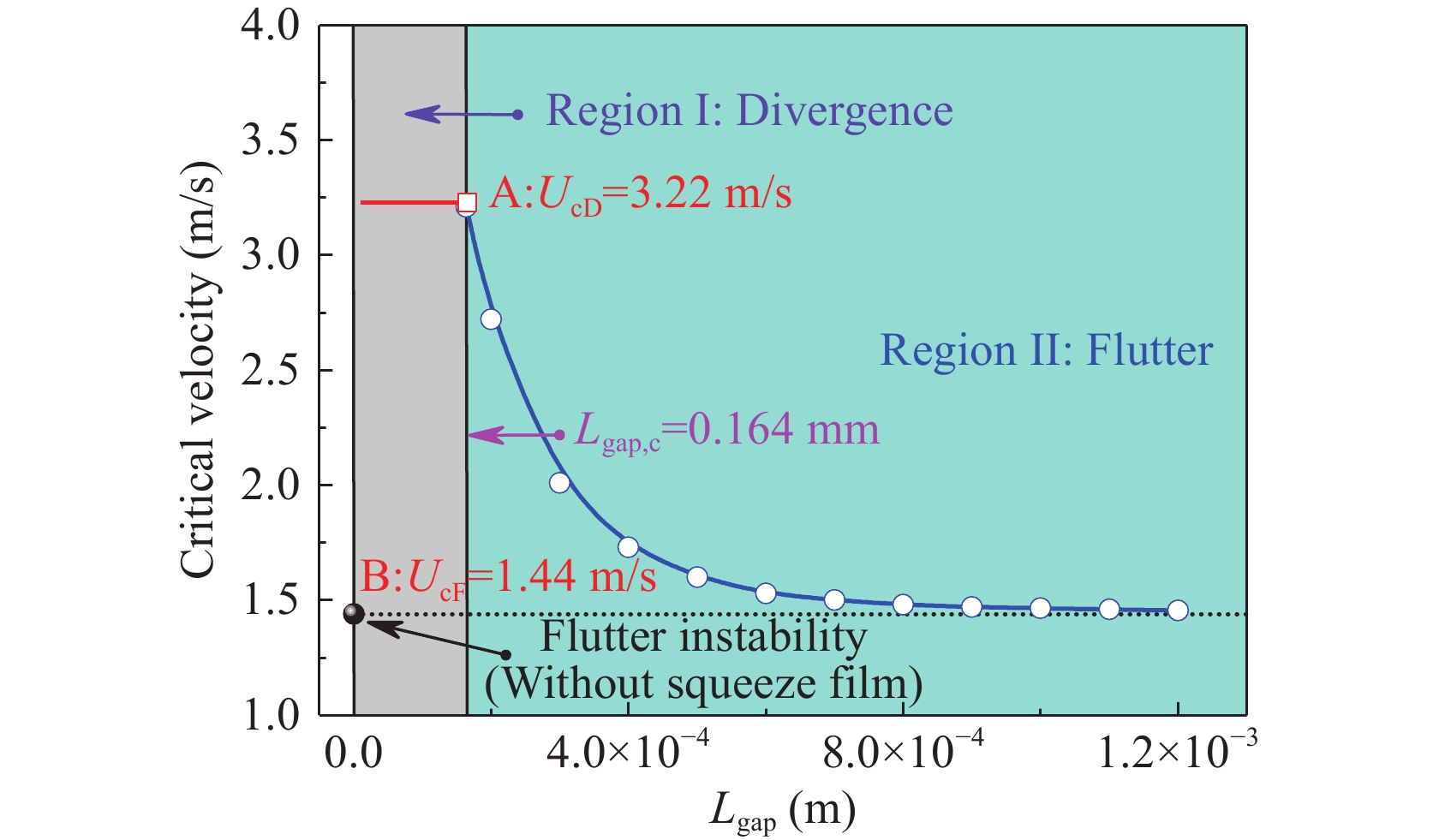
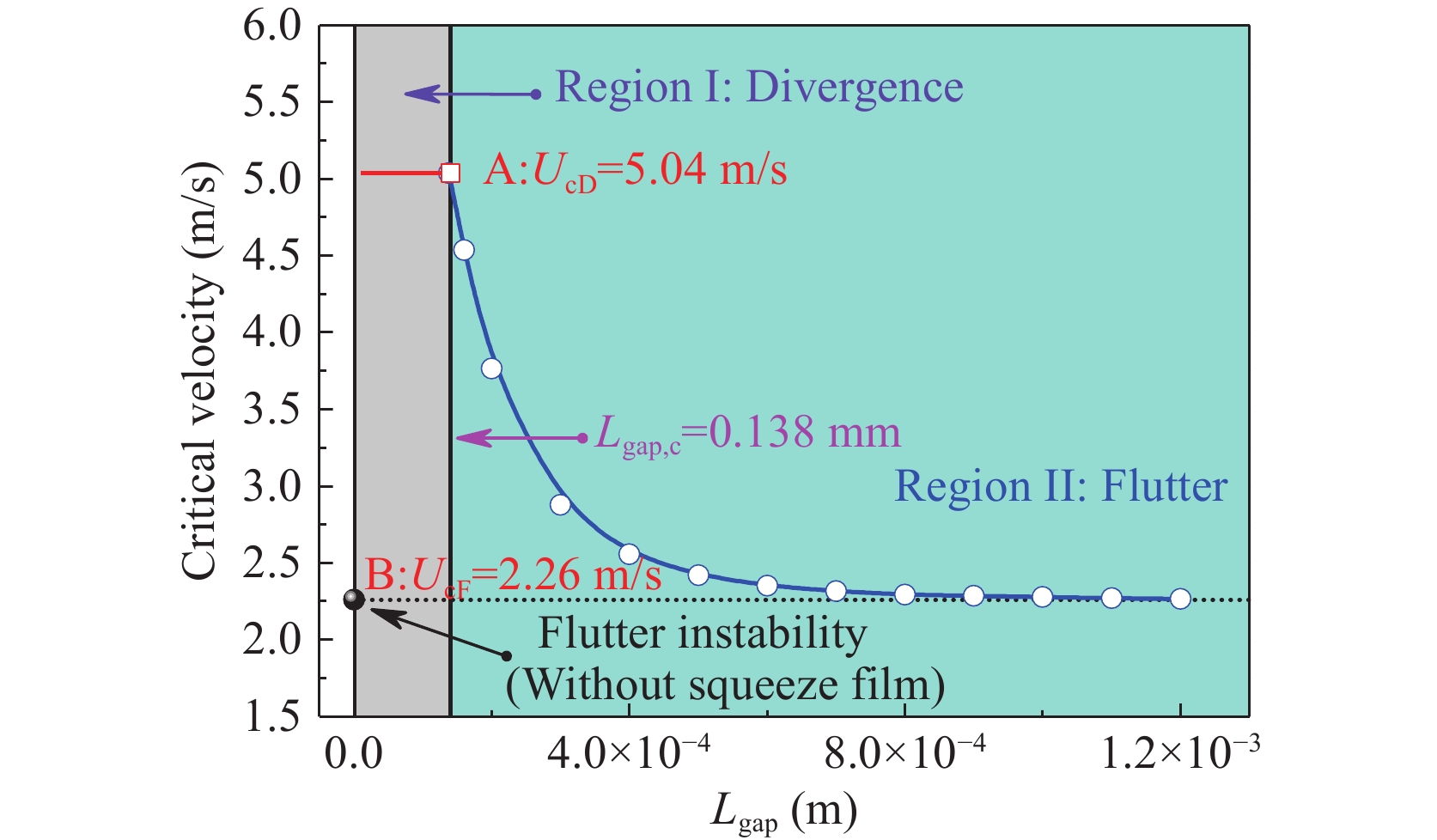
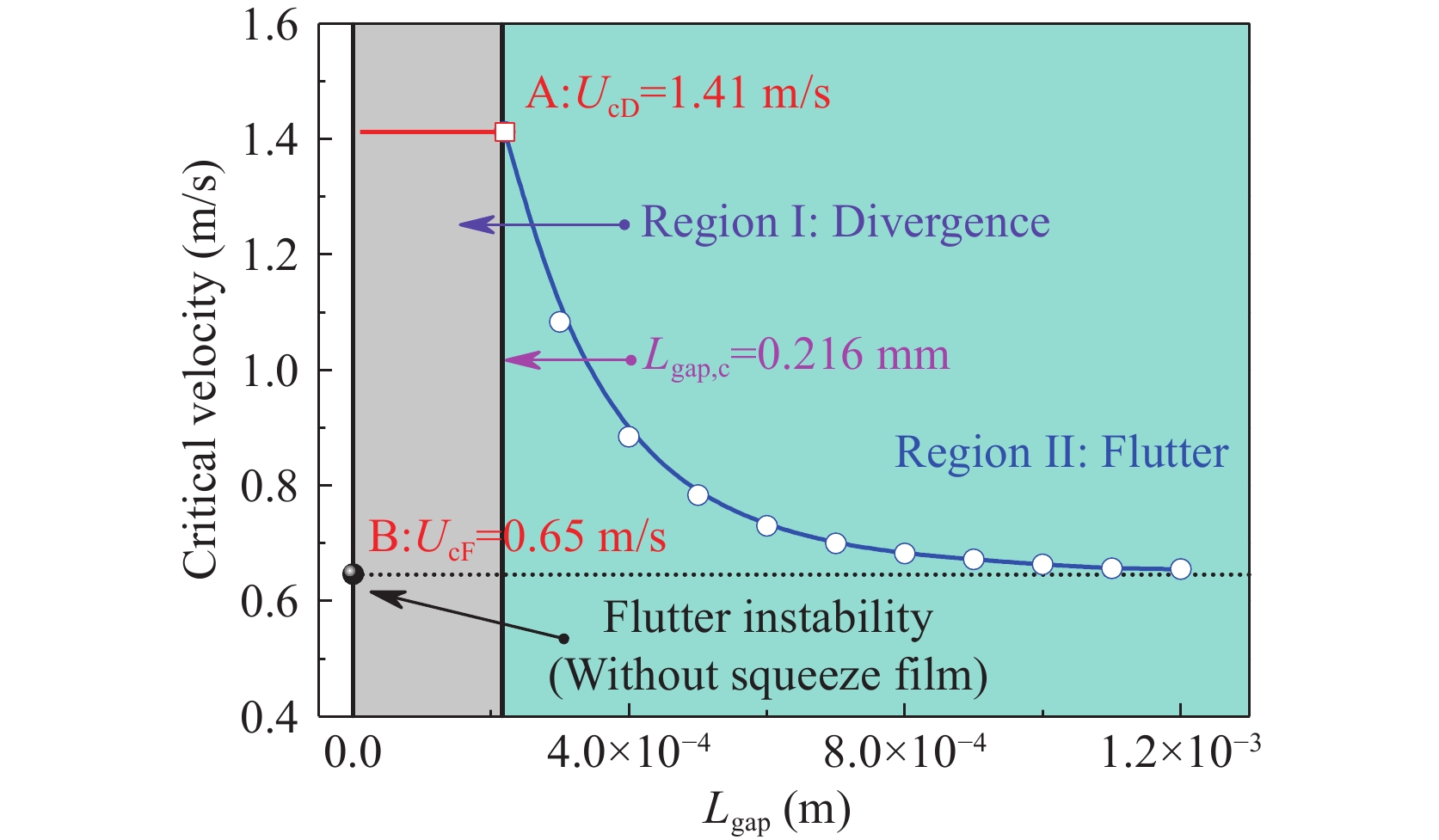
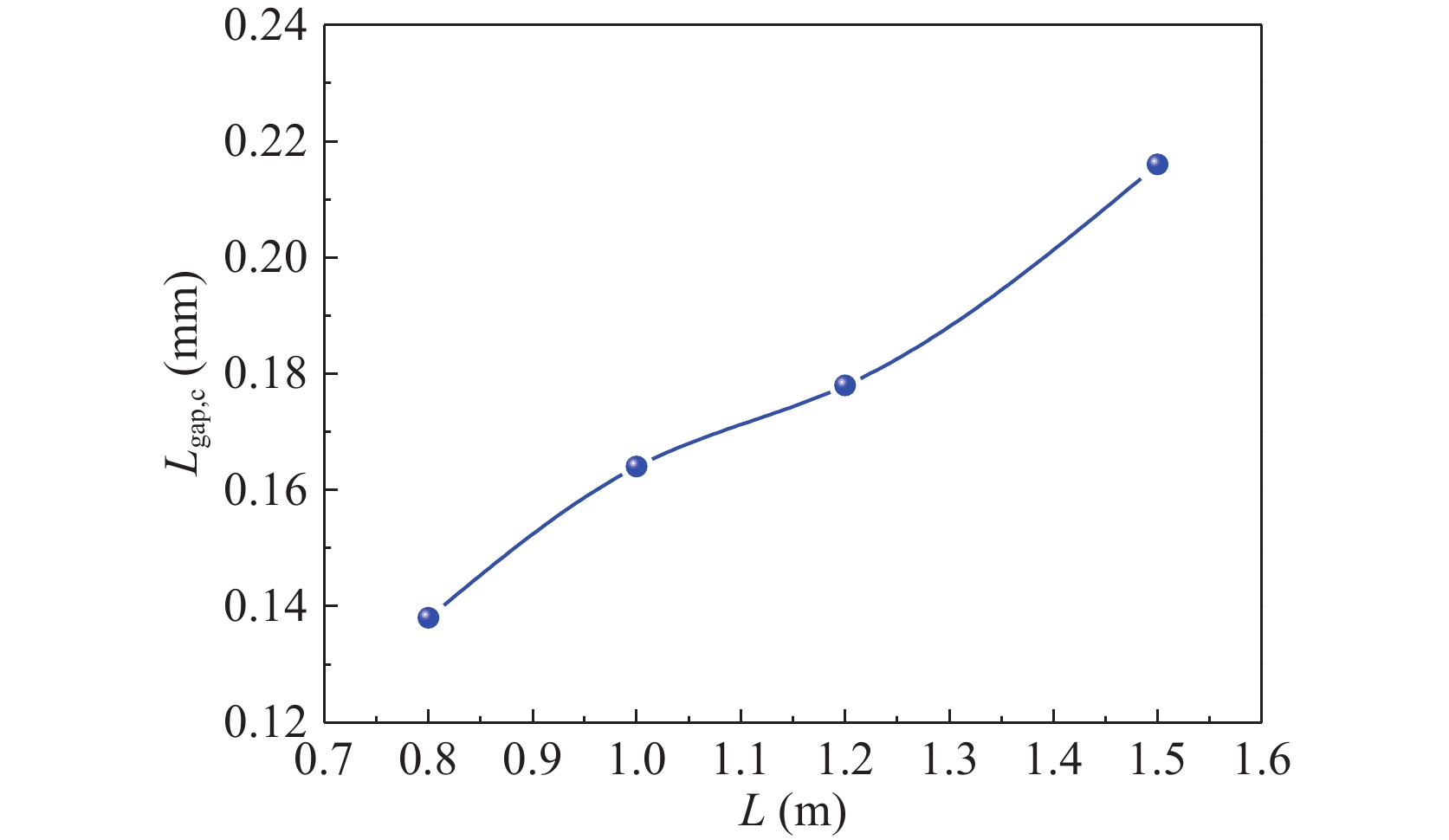
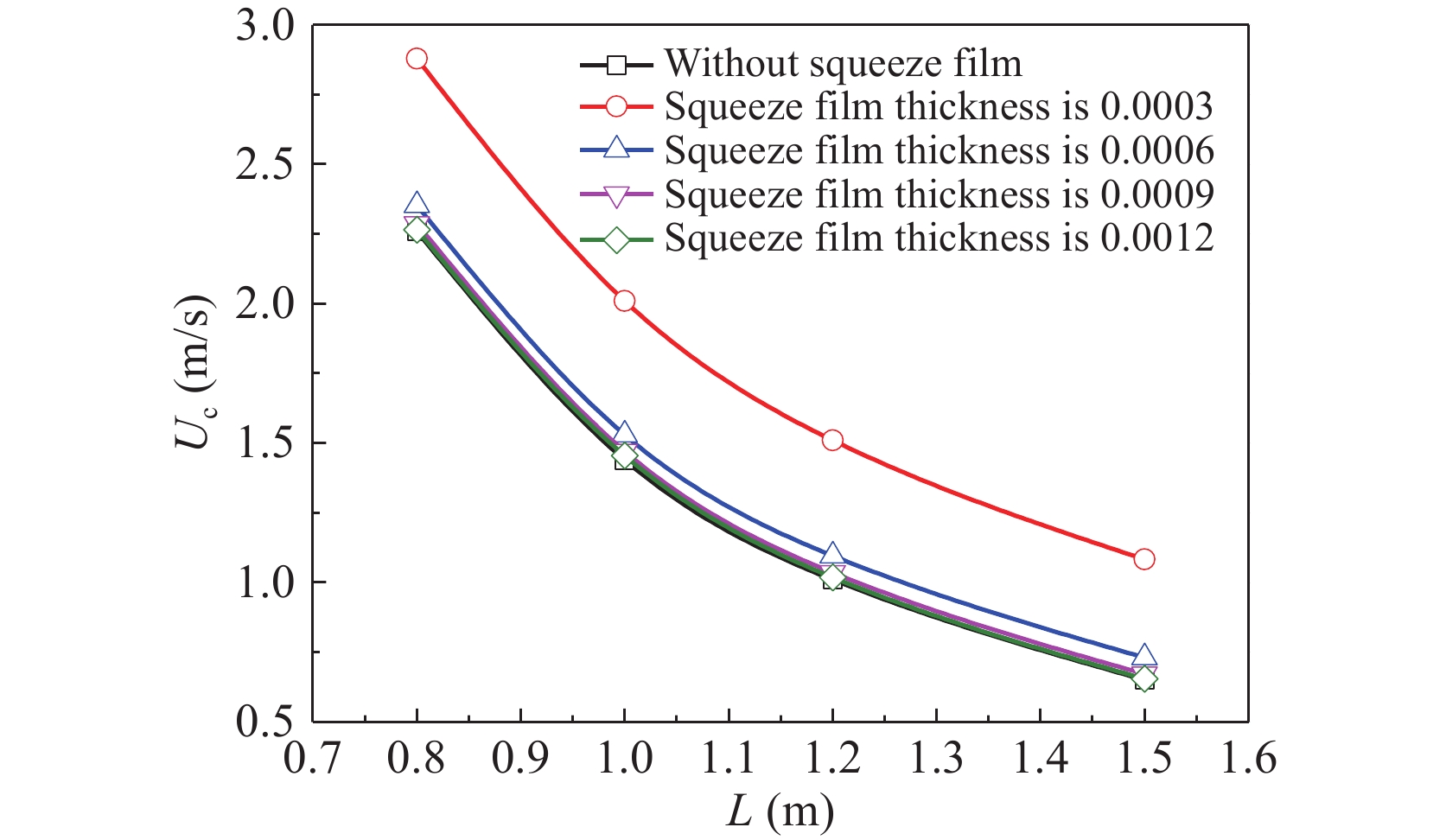
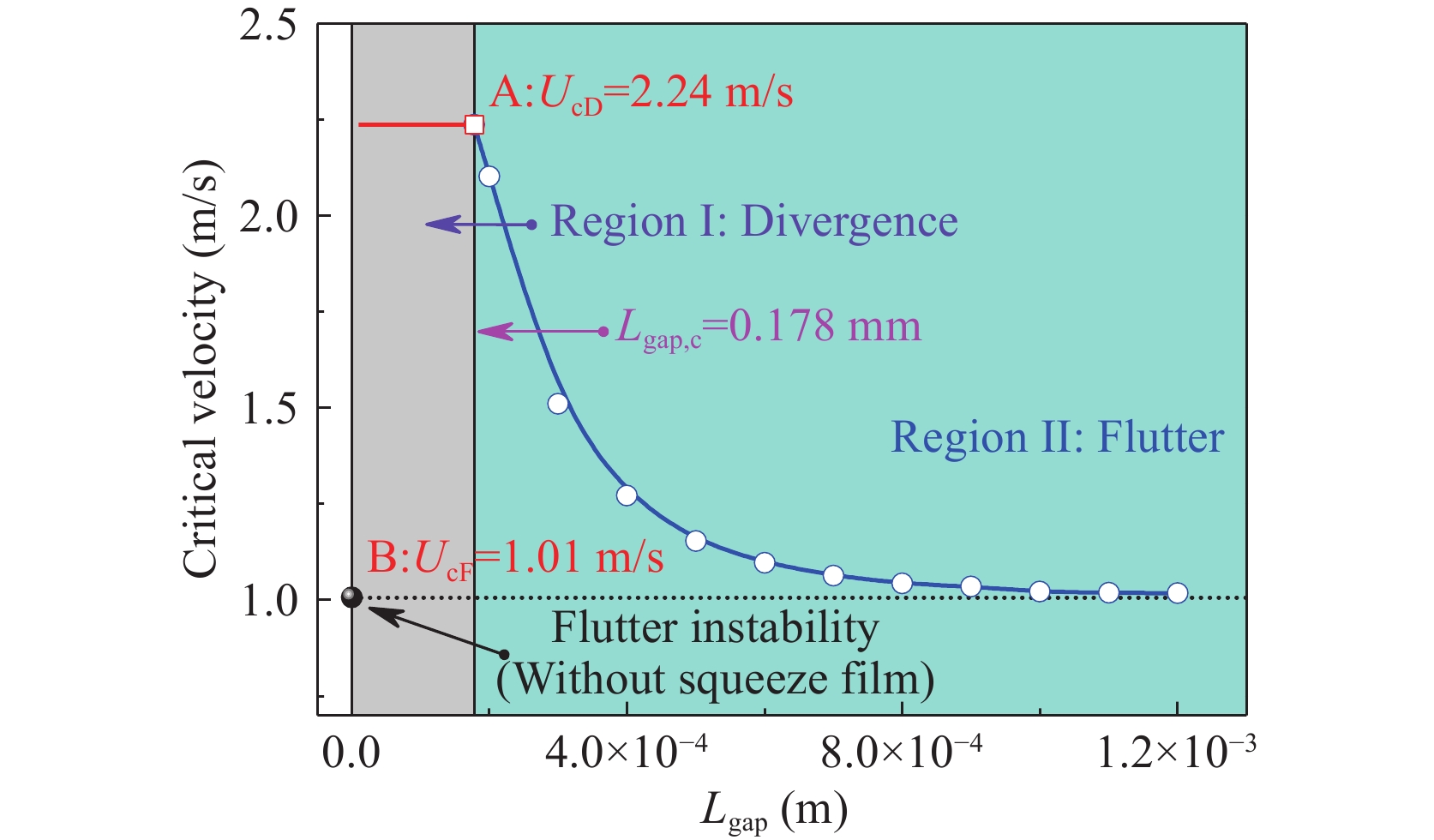
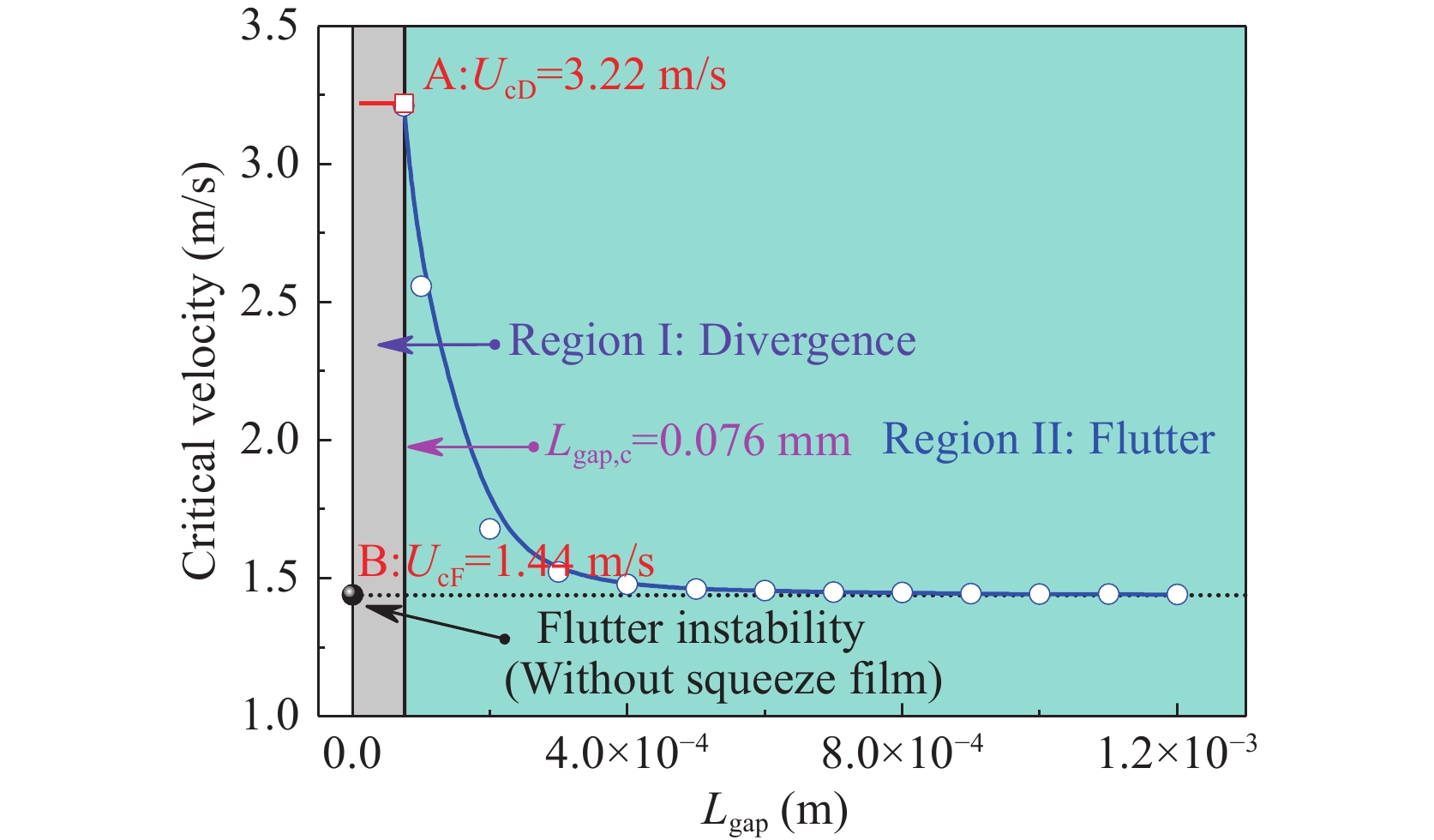
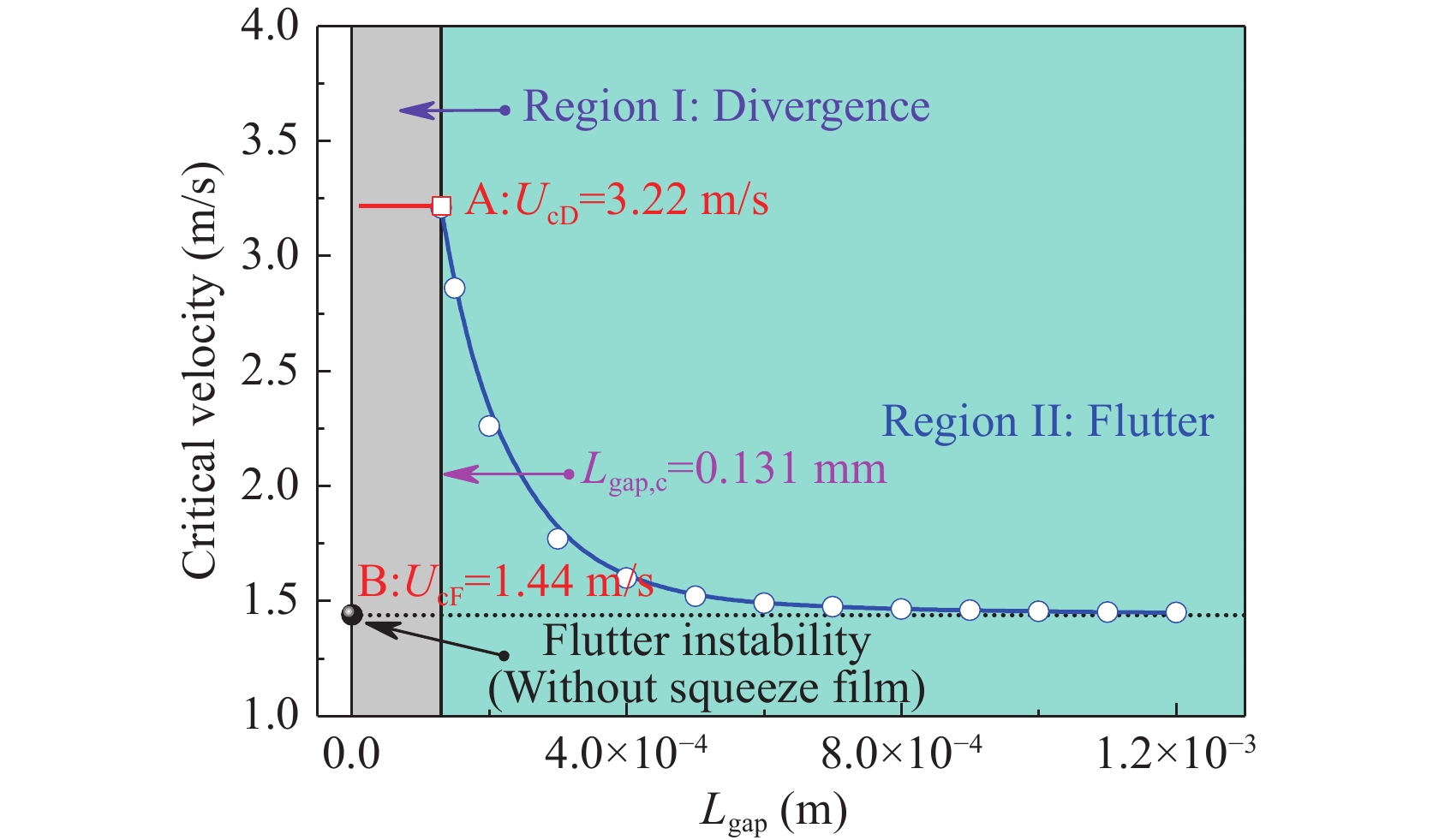
The influence of the squeeze film between the tube and the support structure on flow-induced vibrations is a critical factor in tube bundles subjected to two-phase cross-flow. This aspect can significantly alter the threshold for fluidelastic instability and affect heat transfer efficiency. This paper presents a mathematical model incorporating the squeeze film force between the tube and the support structure. We aim to clarify the mechanisms underlying fluidelastic instability in tube bundle systems exposed to two-phase flow. Using a self-developed computer program, we performed numerical calculations to examine the influence of the squeeze film on the threshold of fluidelastic instability in the tube bundle system. Furthermore, we analyzed how the thickness and length of the squeeze film affect both the underlying mechanisms and the critical velocity of fluidelastic instability.
The influence of the squeeze film between the tube and the support structure on flow-induced vibrations is a critical factor in tube bundles subjected to two-phase cross-flow. This aspect can significantly alter the threshold for fluidelastic instability and affect heat transfer efficiency. This paper presents a mathematical model incorporating the squeeze film force between the tube and the support structure. We aim to clarify the mechanisms underlying fluidelastic instability in tube bundle systems exposed to two-phase flow. Using a self-developed computer program, we performed numerical calculations to examine the influence of the squeeze film on the threshold of fluidelastic instability in the tube bundle system. Furthermore, we analyzed how the thickness and length of the squeeze film affect both the underlying mechanisms and the critical velocity of fluidelastic instability.
2025, 39(5): 866 -877
doi: 10.1007/s13344-025-0067-9
[Abstract](0)
Abstract:
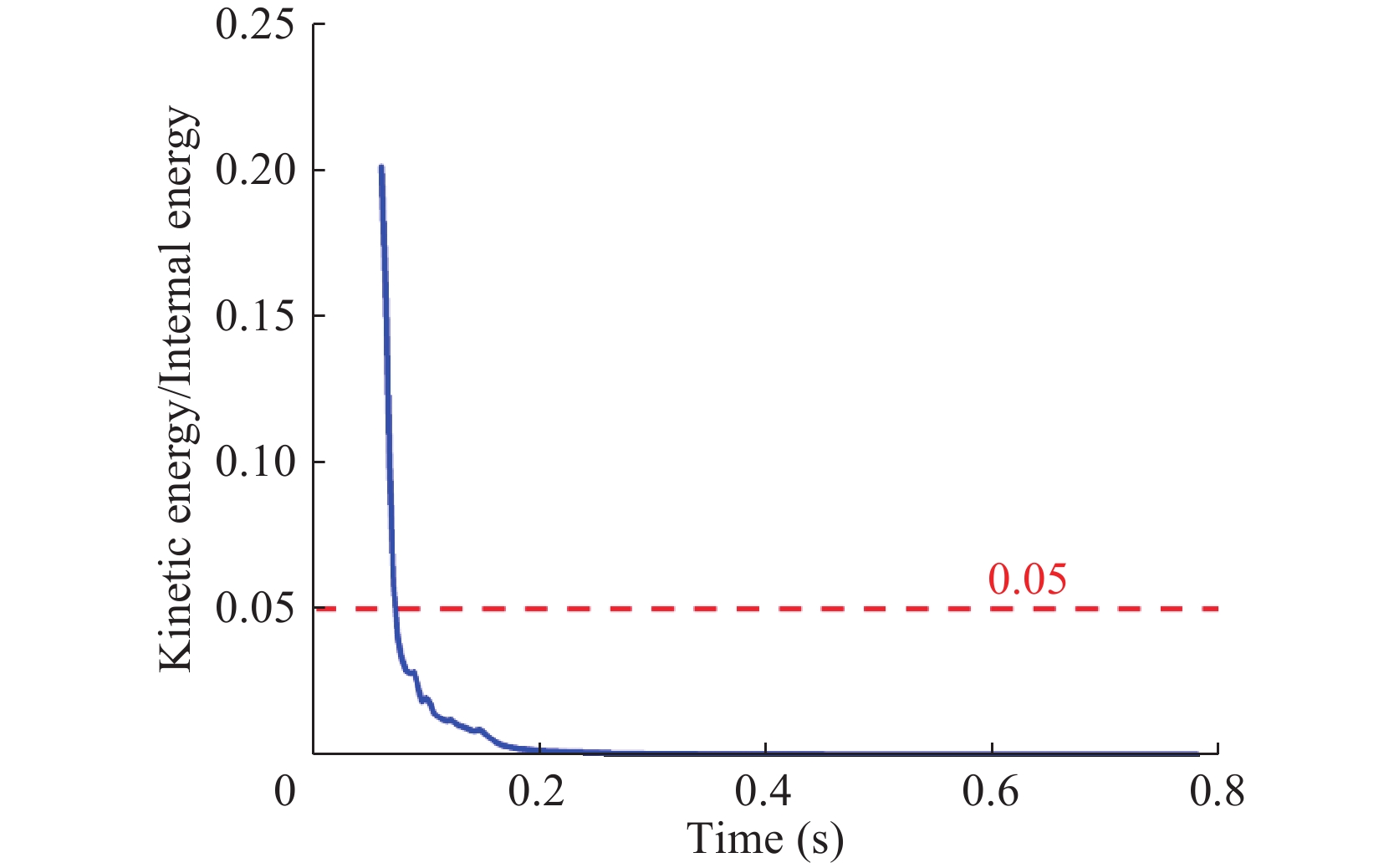
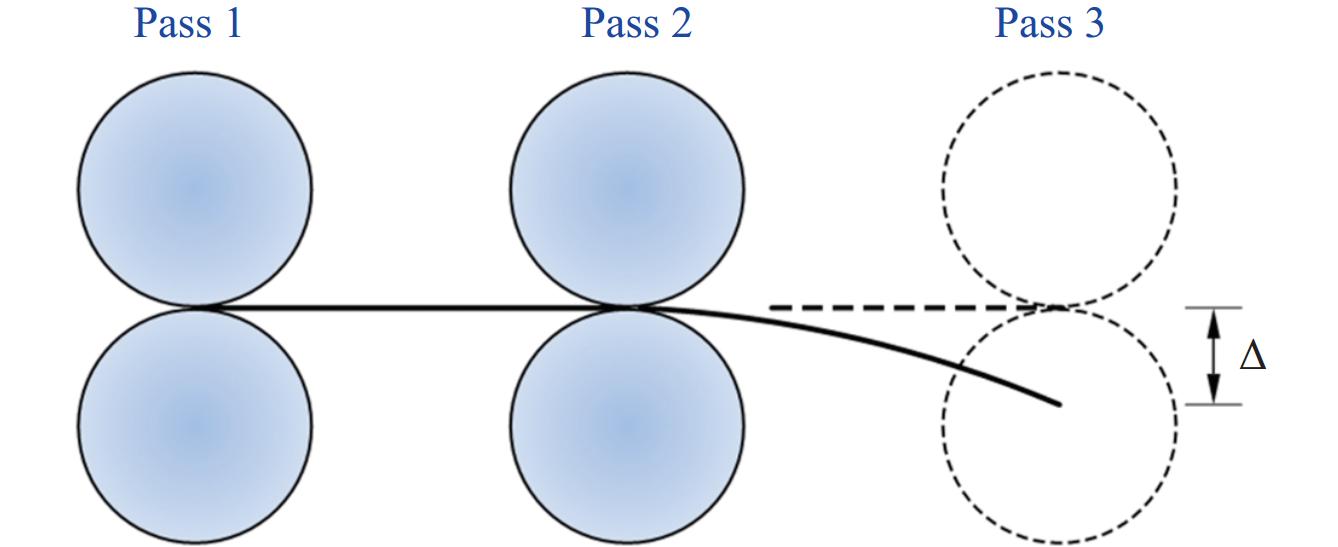
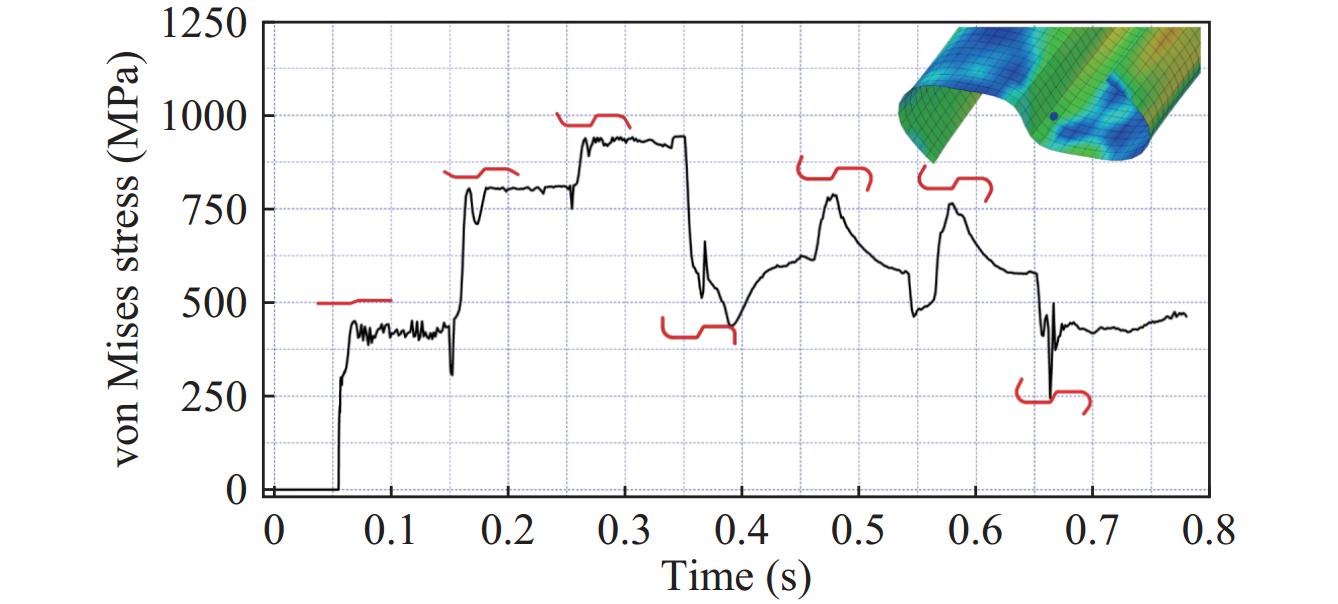
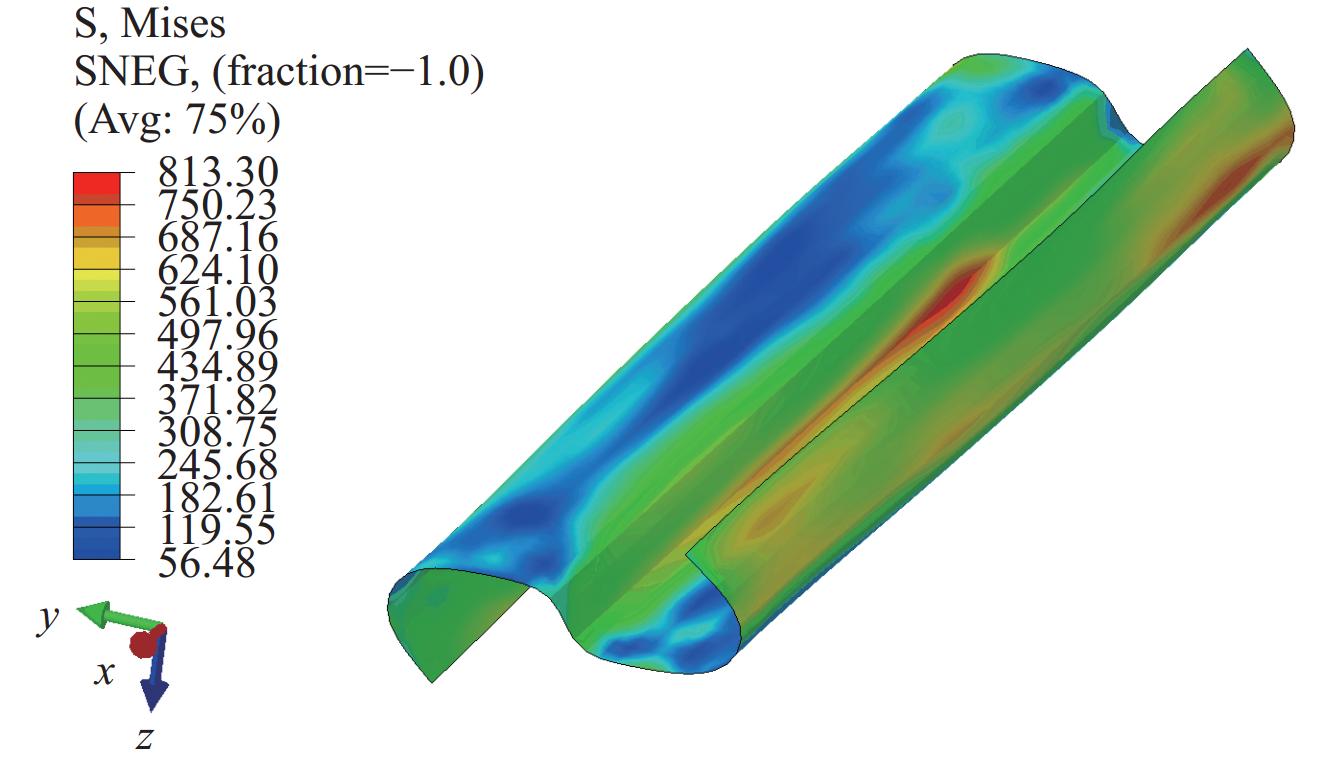
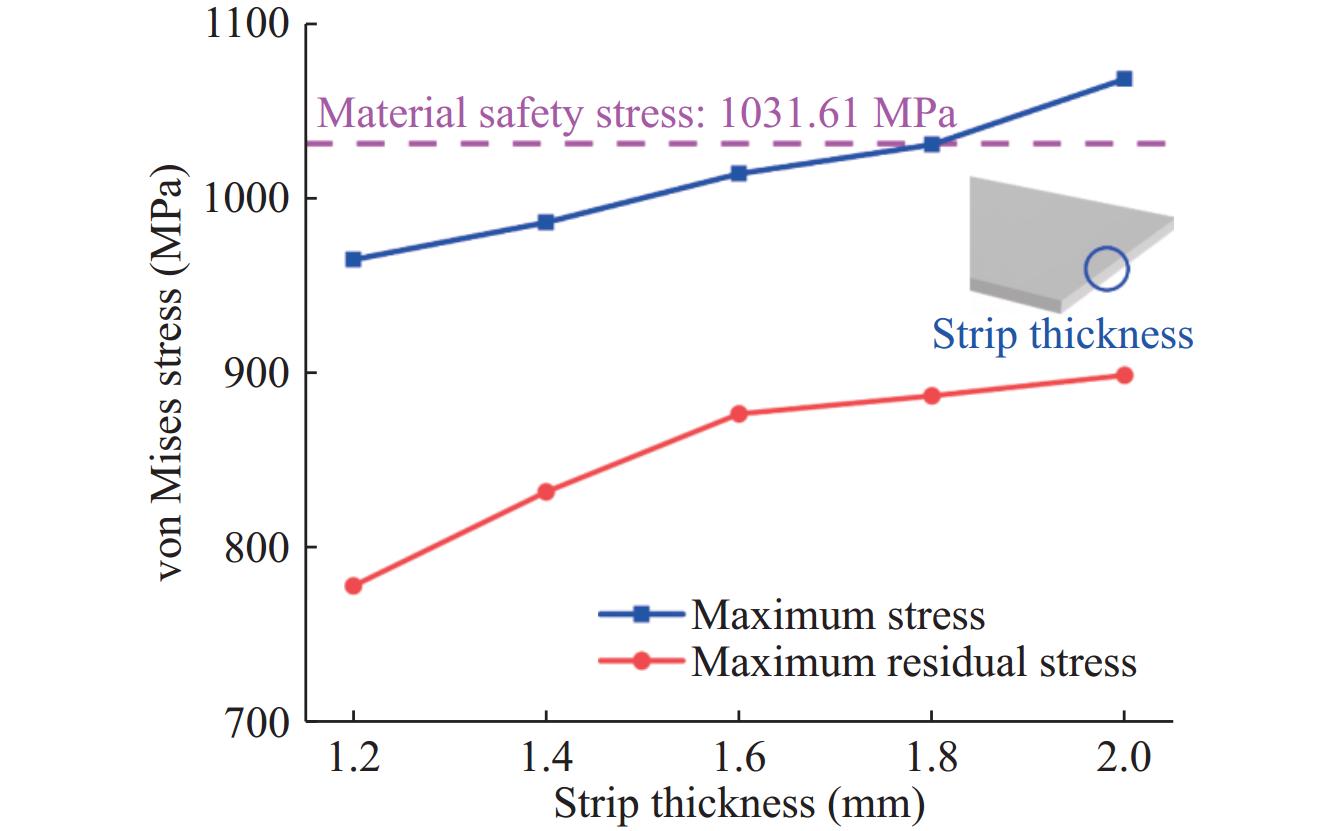
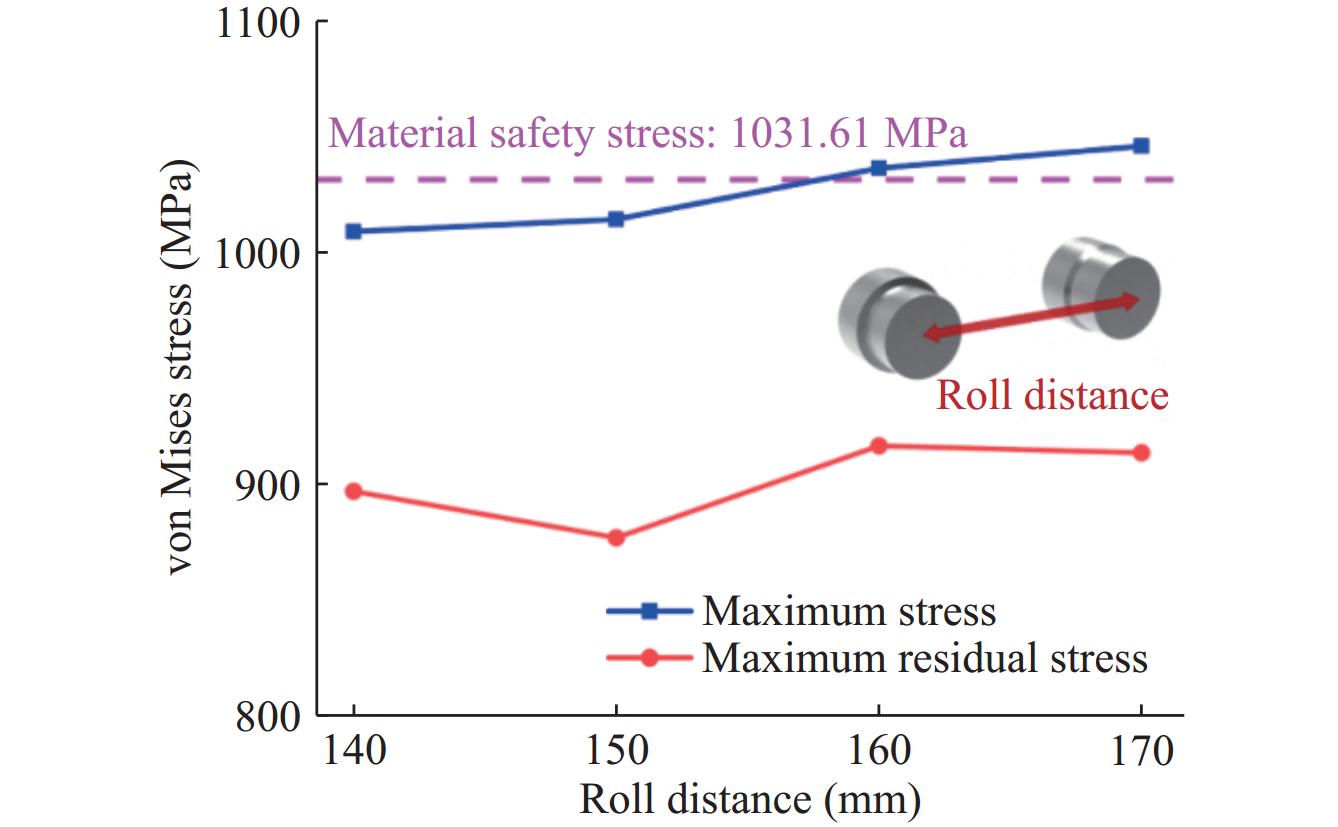
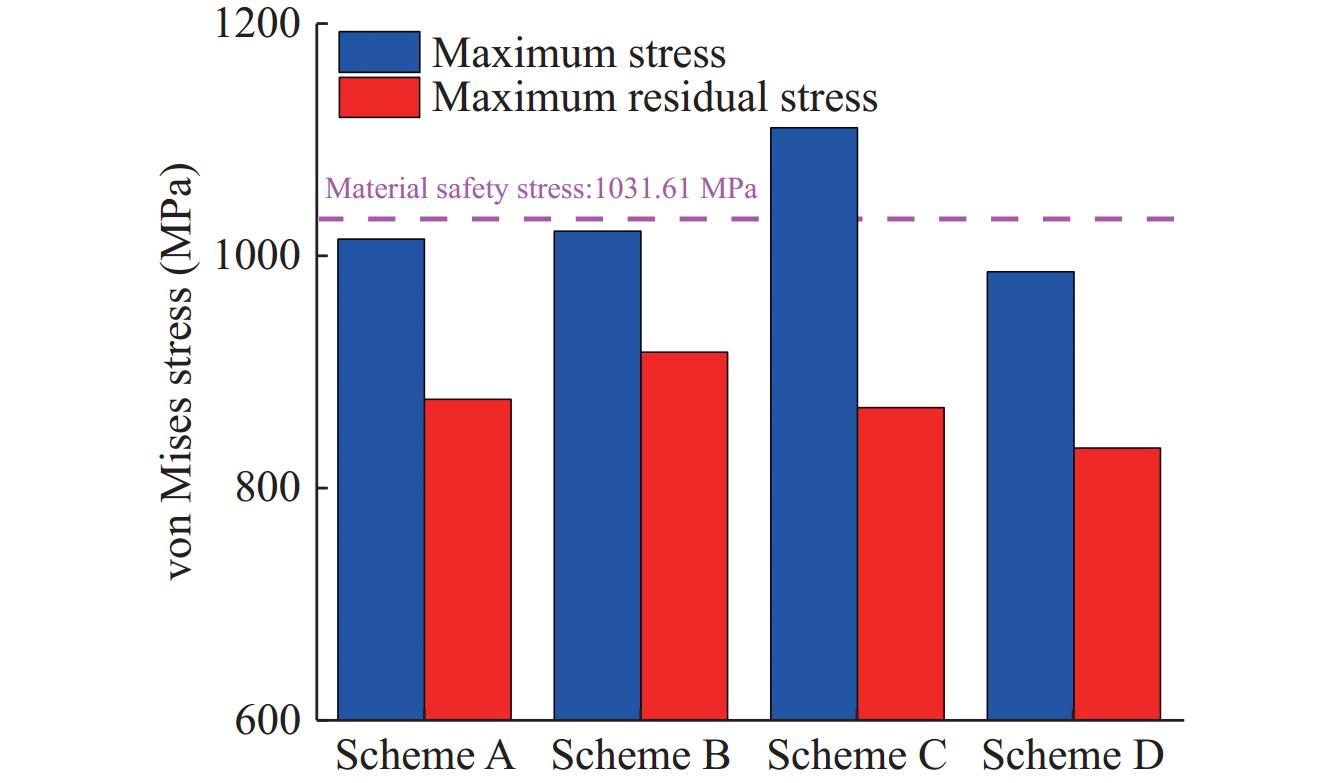
The carcass layer is the innermost structure of flexible marine risers and is responsible for resisting external pressure. It has an “S” section with a spiral interlocking feature. After the multi-pass roll forming of a flat steel strip, a carcass layer is formed by lock forming. During roll forming, the steel strip undergoes significant plastic deformation, and its local area accumulates residual stress owing to multiple loading and unloading cycles. These phenomena complicate the design and analysis of the carcass layer multi-pass roll forming (CLMRF) process and cause issues in the carcass layer during manufacturing, such as strip fracture and low forming quality. Thus, herein, CLMRF was investigated to clarify the stress distribution, and a parameter analysis was performed. First, the CLMRF process was designed on the basis of classical roll-forming design theory. Second, a finite element model was established, and CLMRF was simulated. Third, the distributions of the forming stress and residual stress of the strip during CLMRF were investigated. Finally, the influences of the strip thickness, roll gap, roll distance, and angular increment were investigated. The conclusions of this study can be used to provide technical guidance in the manufacturing of flexible risers.
The carcass layer is the innermost structure of flexible marine risers and is responsible for resisting external pressure. It has an “S” section with a spiral interlocking feature. After the multi-pass roll forming of a flat steel strip, a carcass layer is formed by lock forming. During roll forming, the steel strip undergoes significant plastic deformation, and its local area accumulates residual stress owing to multiple loading and unloading cycles. These phenomena complicate the design and analysis of the carcass layer multi-pass roll forming (CLMRF) process and cause issues in the carcass layer during manufacturing, such as strip fracture and low forming quality. Thus, herein, CLMRF was investigated to clarify the stress distribution, and a parameter analysis was performed. First, the CLMRF process was designed on the basis of classical roll-forming design theory. Second, a finite element model was established, and CLMRF was simulated. Third, the distributions of the forming stress and residual stress of the strip during CLMRF were investigated. Finally, the influences of the strip thickness, roll gap, roll distance, and angular increment were investigated. The conclusions of this study can be used to provide technical guidance in the manufacturing of flexible risers.






2025, 39(5): 878 -890
doi: 10.1007/s13344-025-0068-8
[Abstract](0)
Abstract:
A carcass is the innermost layer of a deep-sea unbonded flexible pipe, which is in direct contact with the gas/liquid-solid multi-phase flow. Considering that stress-accelerated erosion is common for carcasses, this study proposes a general model and simulation method for stress-accelerated erosion (SE) of carcasses under external water pressure. First, an SE model suitable for 316 stainless steel was developed, which was then used for stress-erosion simulation for an external pressurized carcass, and the solid domain, fluid domain and rough inner surface of the carcass were carefully considered. Moreover, a simplified model (equivalent smooth pipe) was also established on the basis of the main geometric characteristics of the carcass, and the stress-erosion characteristics under different operating conditions, including the effects of the elastic stress level, flow velocity, particle diameter and concentration, were carefully compared, and the key factors governing the elastic stress-erosion of the carcass were discussed. Finally, a modified geometry factor (GF) for carcasses was proposed considering the stress acceleration effect.
A carcass is the innermost layer of a deep-sea unbonded flexible pipe, which is in direct contact with the gas/liquid-solid multi-phase flow. Considering that stress-accelerated erosion is common for carcasses, this study proposes a general model and simulation method for stress-accelerated erosion (SE) of carcasses under external water pressure. First, an SE model suitable for 316 stainless steel was developed, which was then used for stress-erosion simulation for an external pressurized carcass, and the solid domain, fluid domain and rough inner surface of the carcass were carefully considered. Moreover, a simplified model (equivalent smooth pipe) was also established on the basis of the main geometric characteristics of the carcass, and the stress-erosion characteristics under different operating conditions, including the effects of the elastic stress level, flow velocity, particle diameter and concentration, were carefully compared, and the key factors governing the elastic stress-erosion of the carcass were discussed. Finally, a modified geometry factor (GF) for carcasses was proposed considering the stress acceleration effect.



2025, 39(5): 891 -903
doi: 10.1007/s13344-025-0069-7
[Abstract](0)
Abstract:
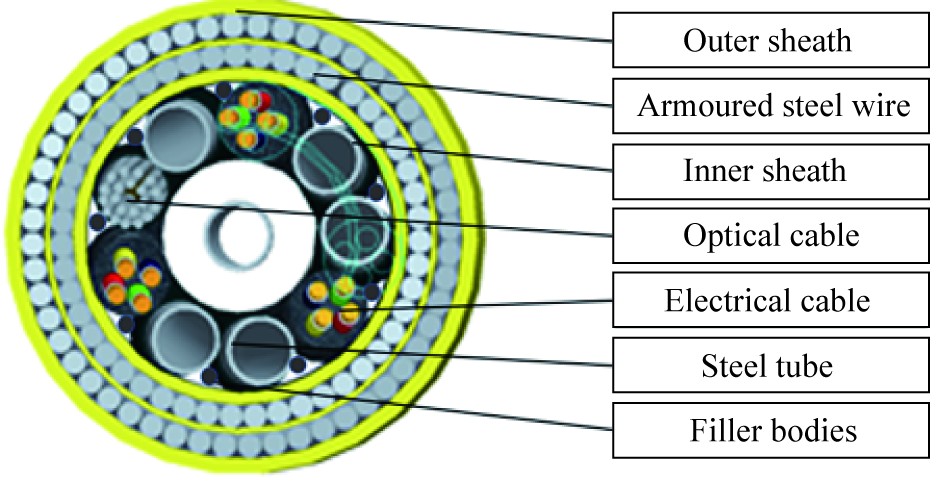
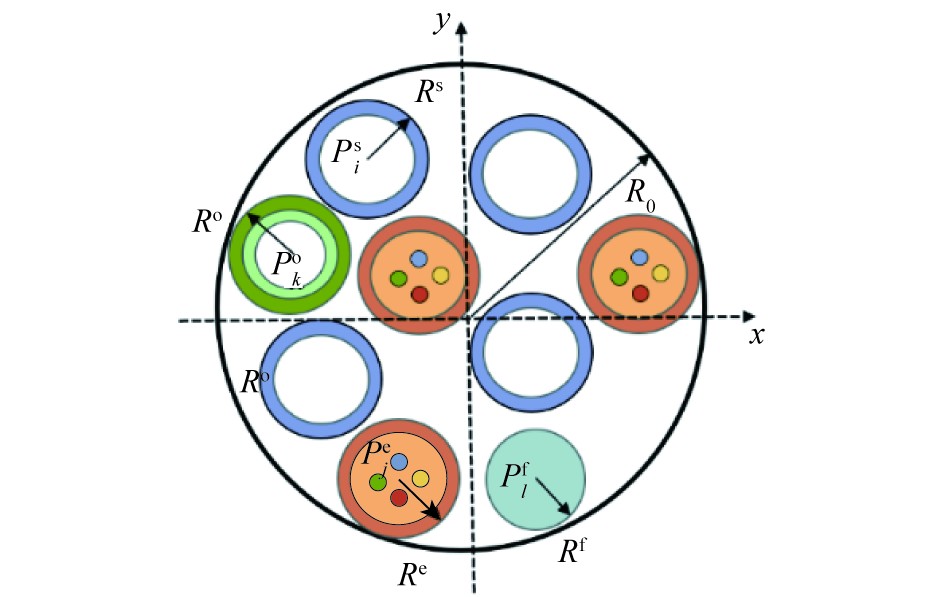
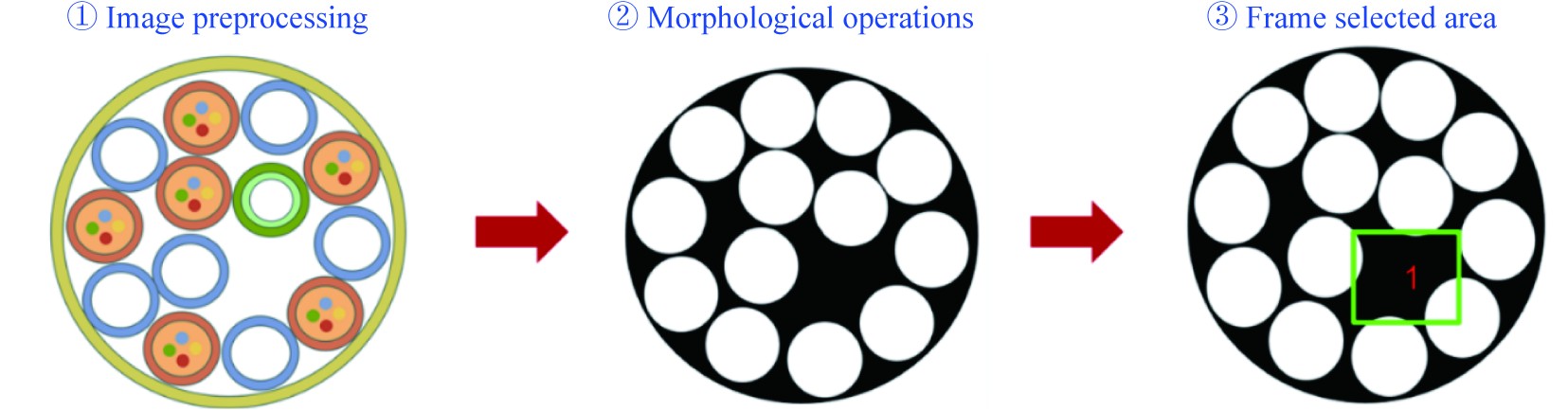
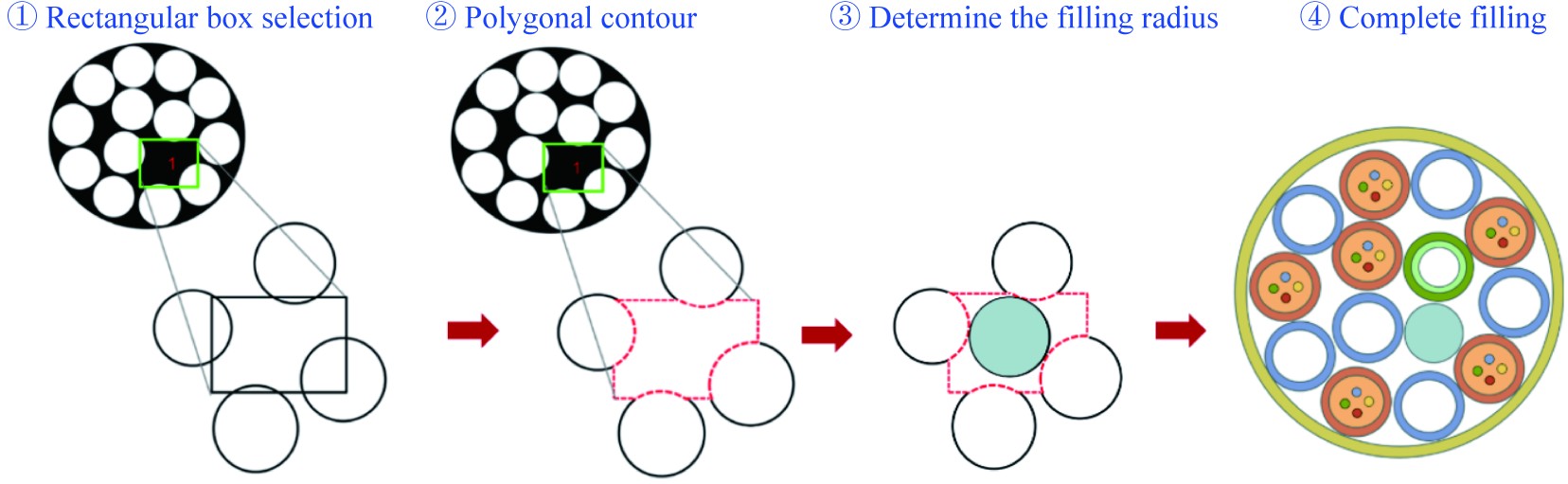
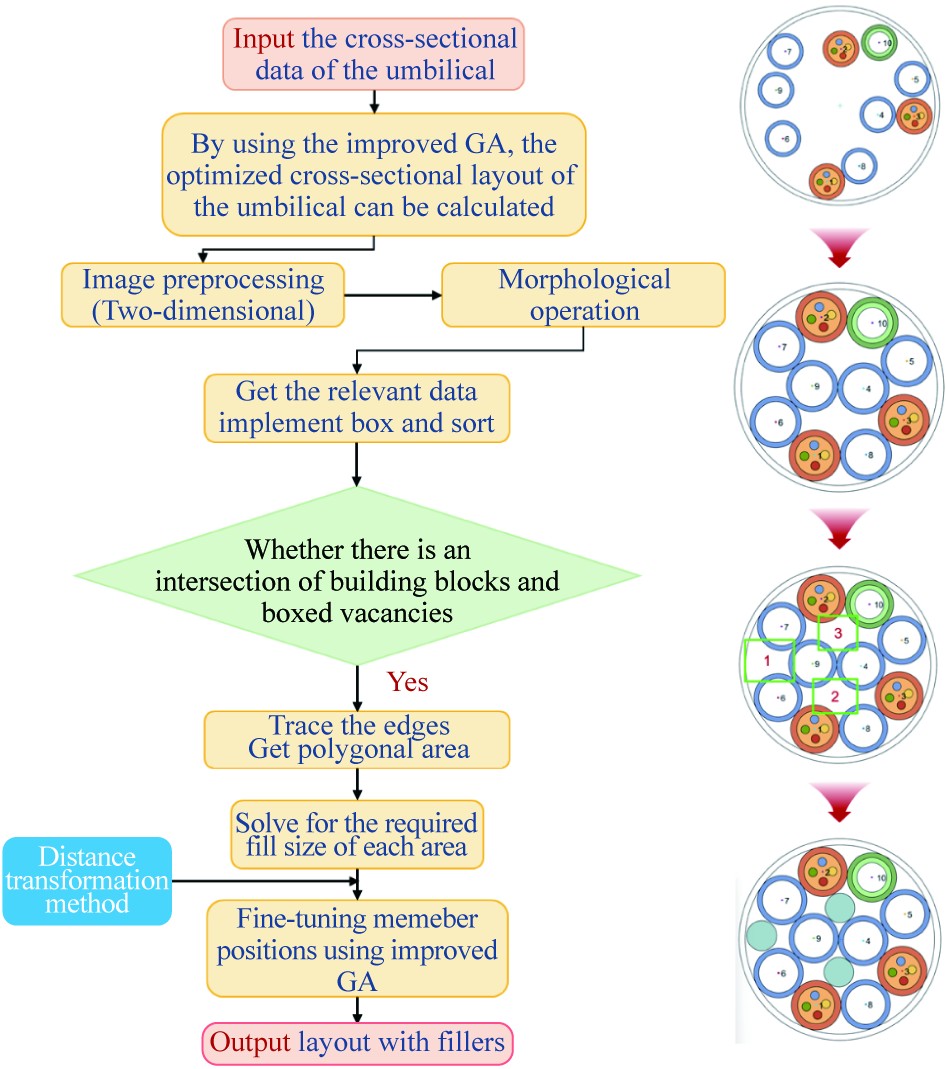
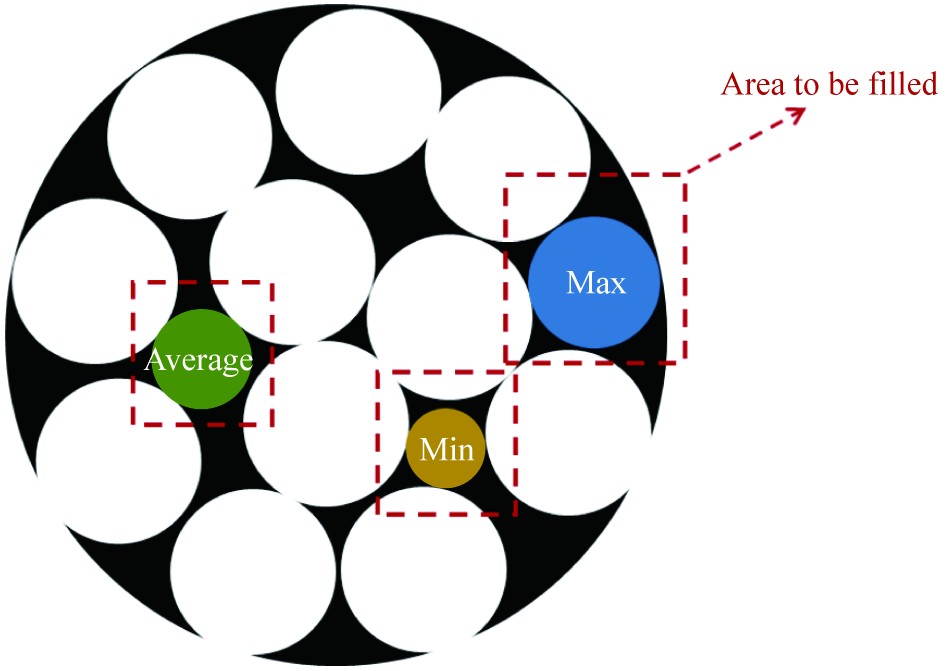
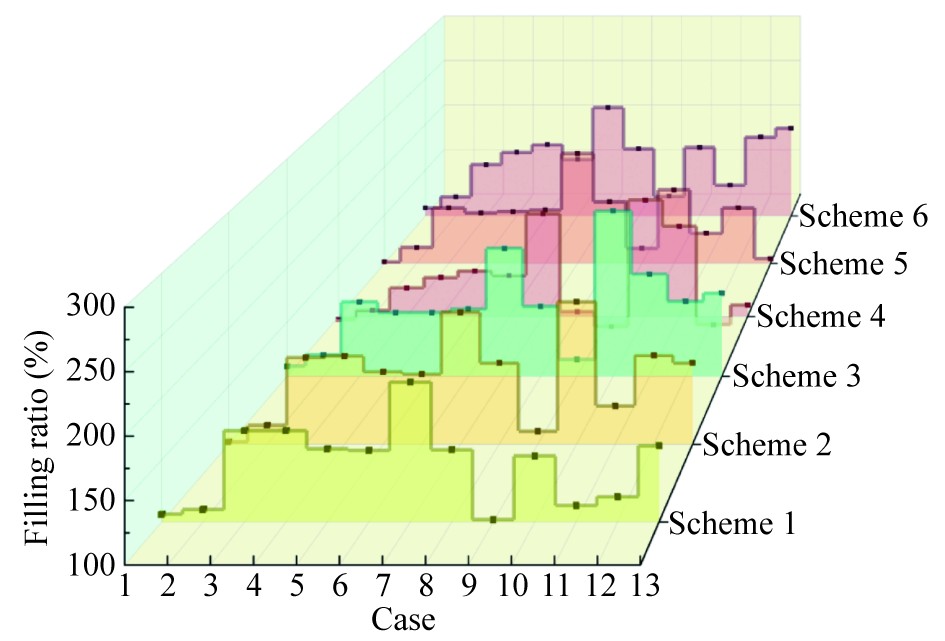
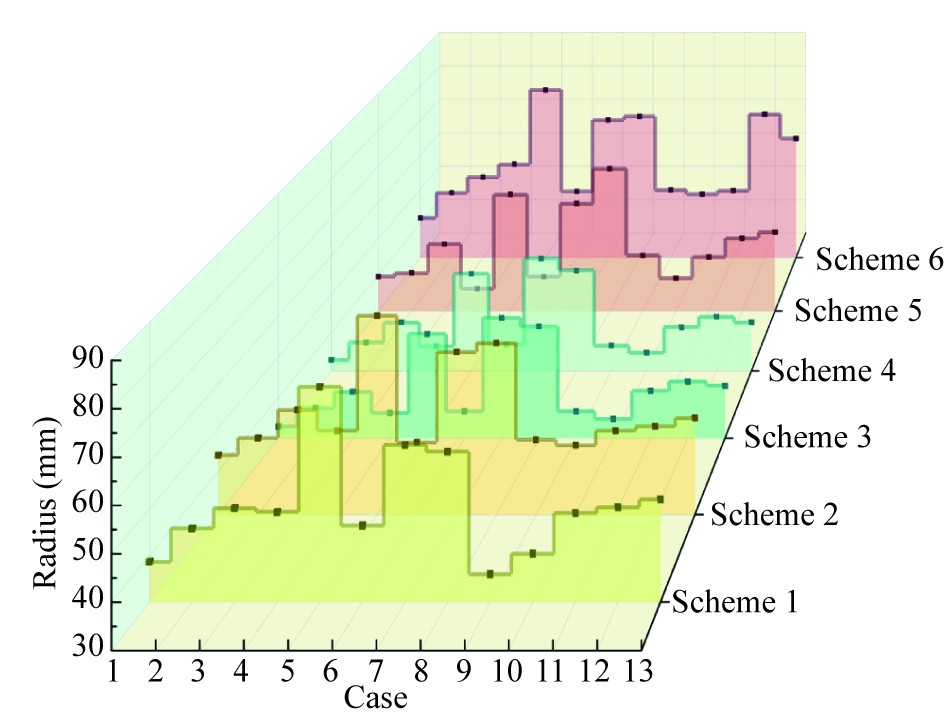
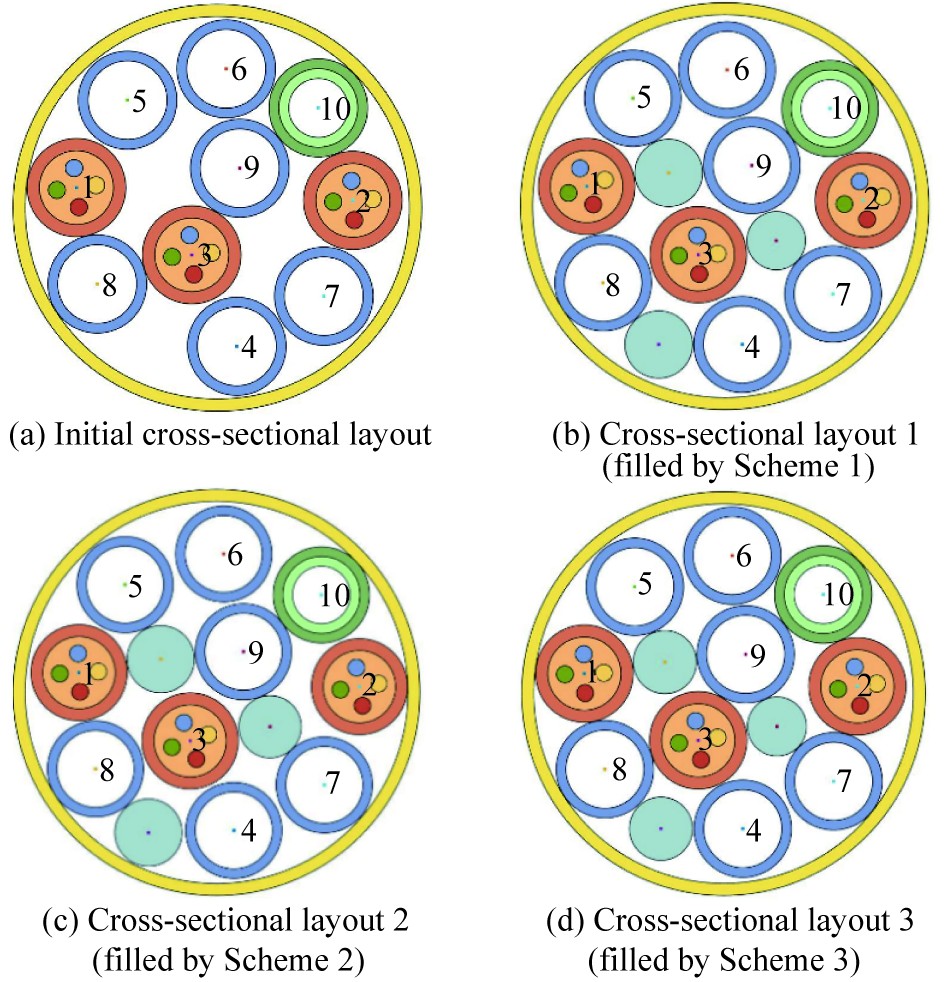
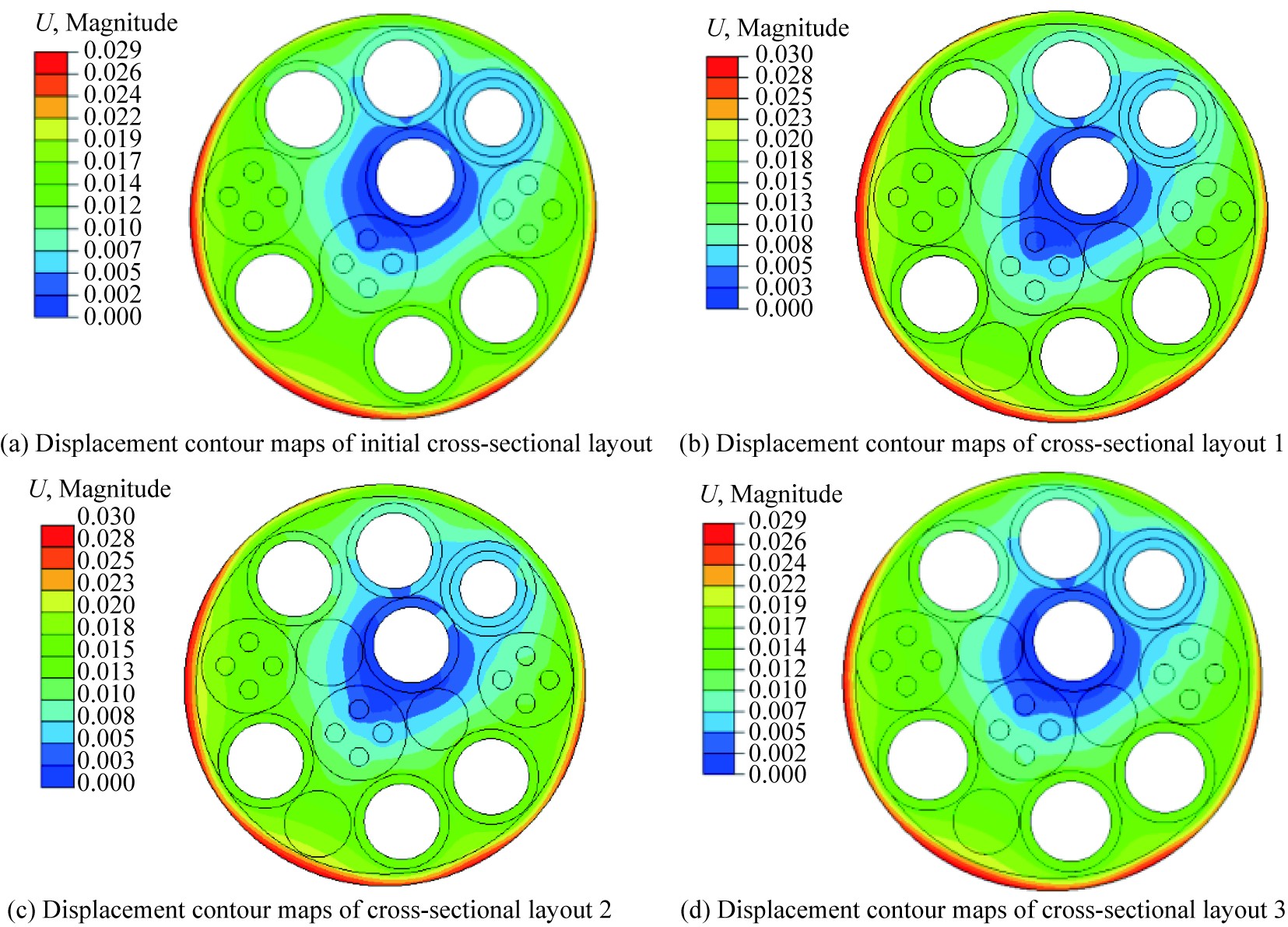
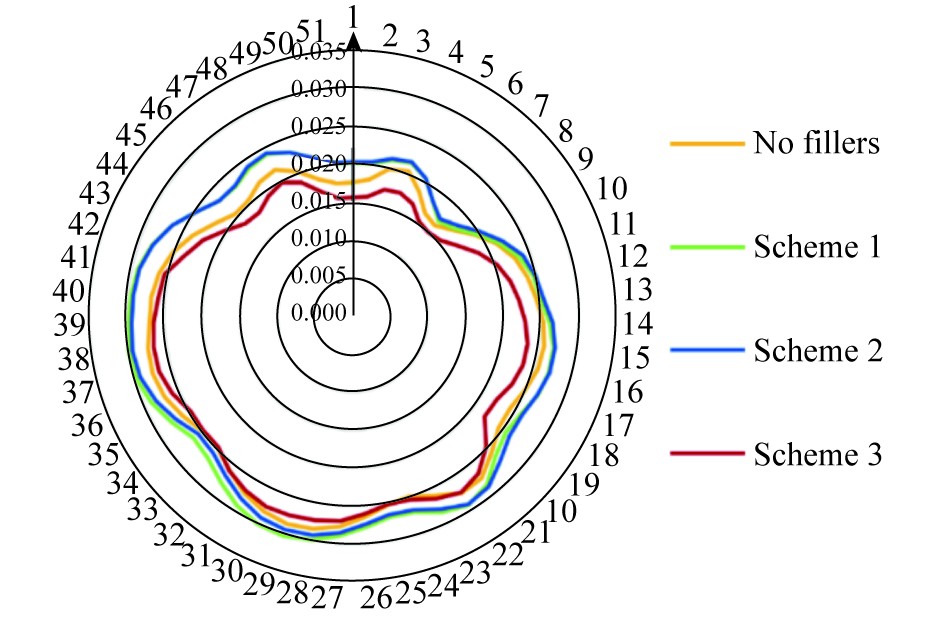
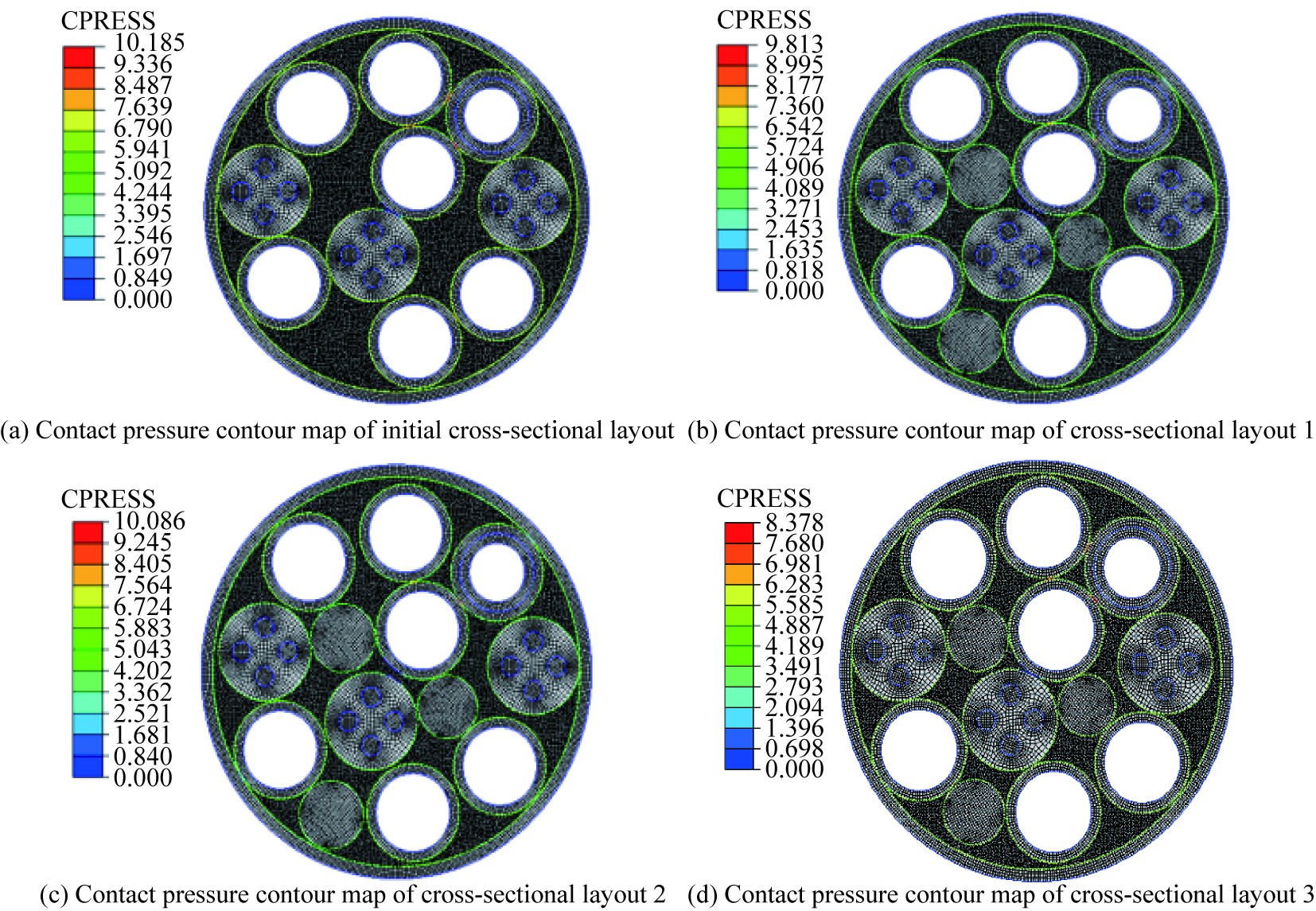
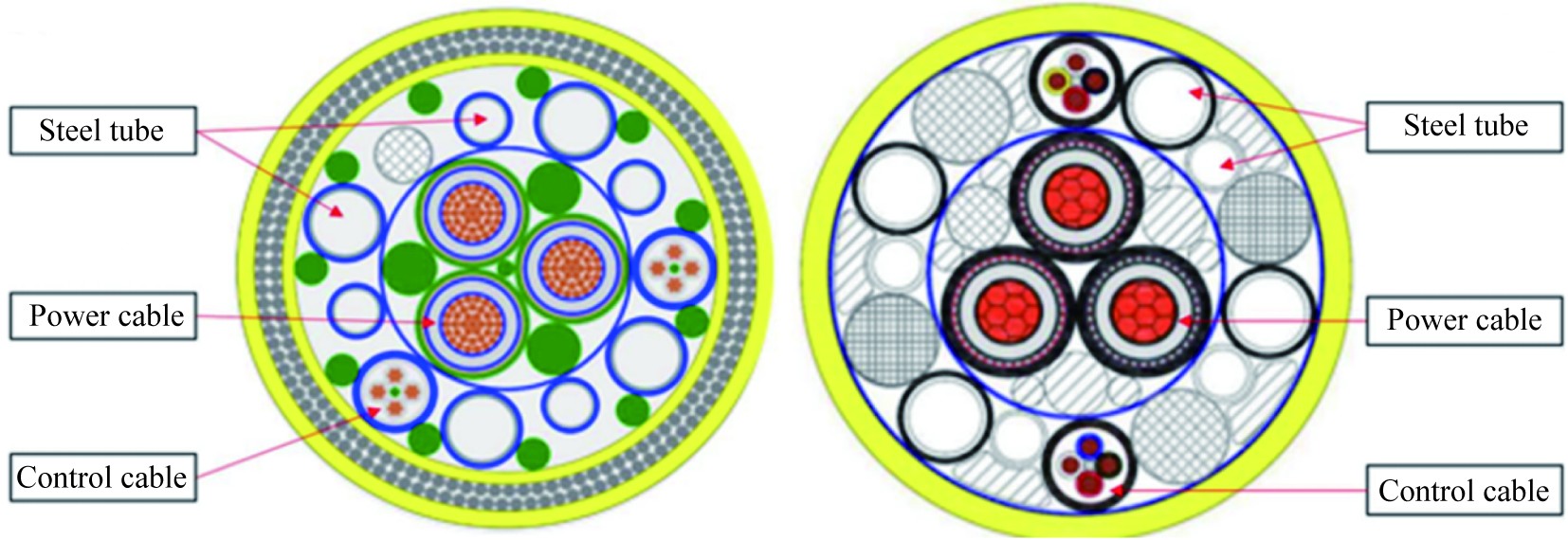
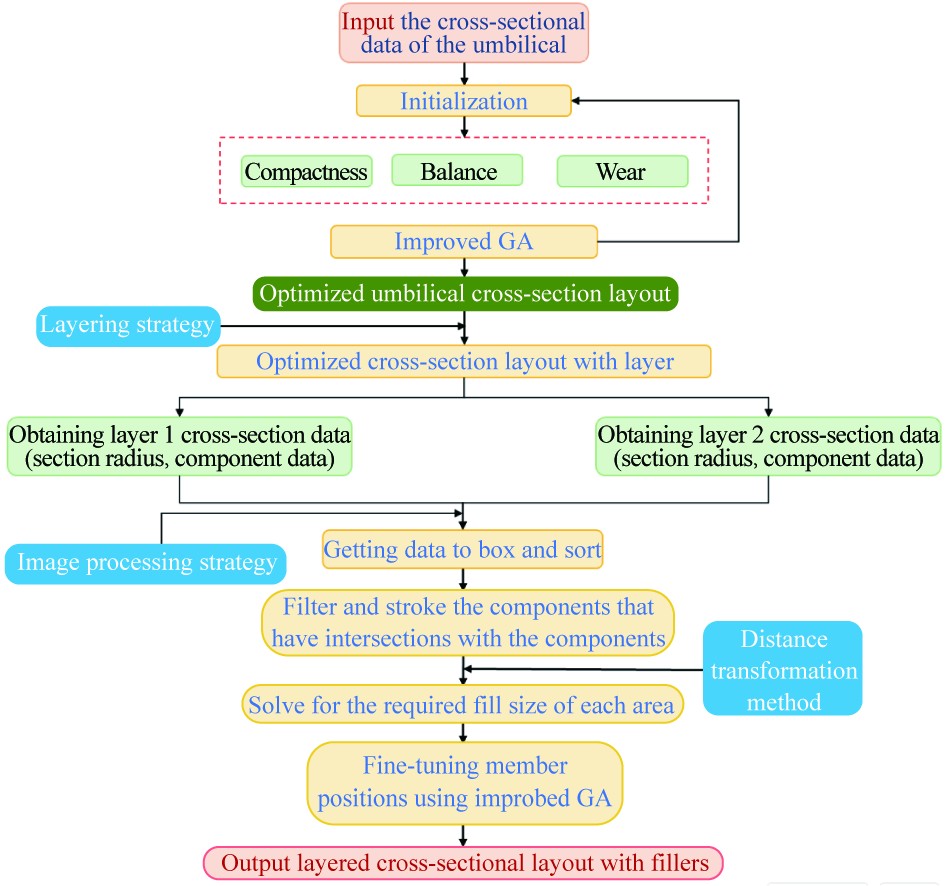
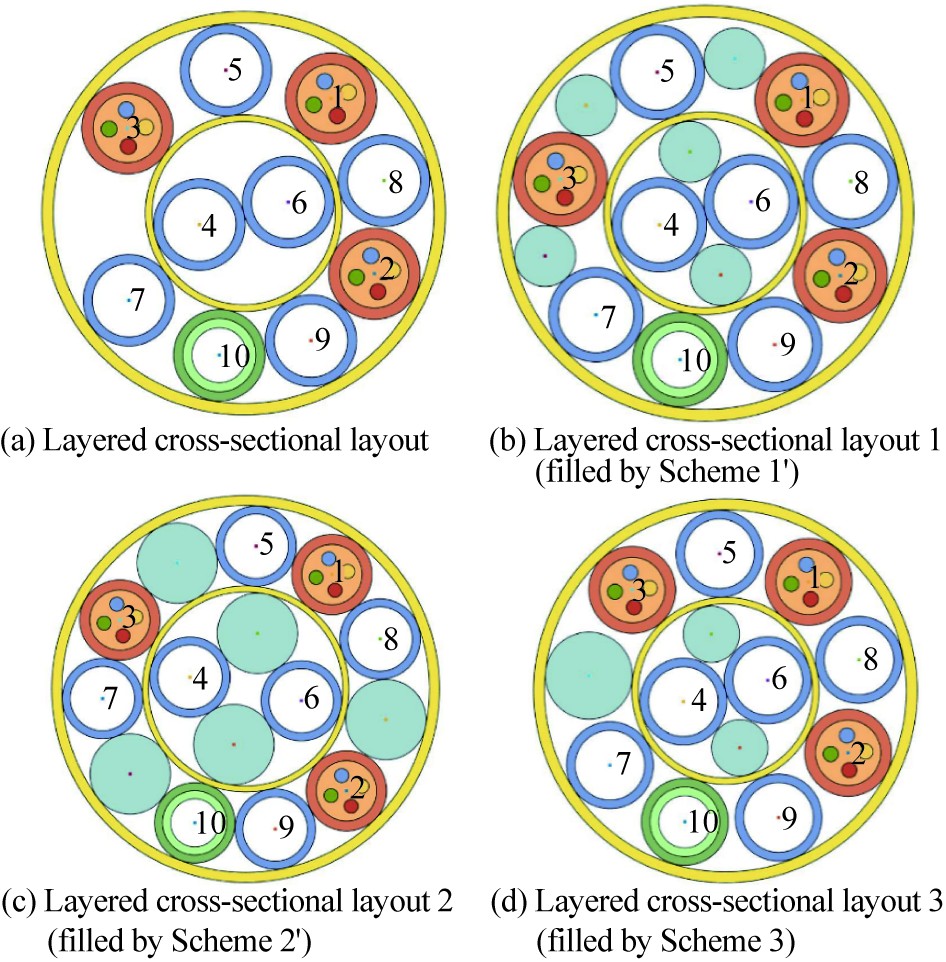
The umbilical, a key component in offshore energy extraction, plays a vital role in ensuring the stable operation of the entire production system. The extensive variety of cross-sectional components creates highly complex layout combinations. Furthermore, due to constraints in component quantity and geometry within the cross-sectional layout, filler bodies must be incorporated to maintain cross-section performance. Conventional design approaches based on manual experience suffer from inefficiency, high variability, and difficulties in quantification. This paper presents a multi-level automatic filling optimization design method for umbilical cross-sectional layouts to address these limitations. Initially, the research establishes a multi-objective optimization model that considers compactness, balance, and wear resistance of the cross-section, employing an enhanced genetic algorithm to achieve a near-optimal layout. Subsequently, the study implements an image processing-based vacancy detection technique to accurately identify cross-sectional gaps. To manage the variability and diversity of these vacant regions, the research introduces a multi-level filling method that strategically selects and places filler bodies of varying dimensions, overcoming the constraints of uniform-size fillers. Additionally, the method incorporates a hierarchical strategy that subdivides the complex cross-section into multiple layers, enabling layer-by-layer optimization and filling. This approach reduces manufacturing equipment requirements while ensuring practical production process feasibility. The methodology is validated through a specific umbilical case study. The results demonstrate improvements in compactness, balance, and wear resistance compared with the initial cross-section, offering novel insights and valuable references for filler design in umbilical cross-sections.
The umbilical, a key component in offshore energy extraction, plays a vital role in ensuring the stable operation of the entire production system. The extensive variety of cross-sectional components creates highly complex layout combinations. Furthermore, due to constraints in component quantity and geometry within the cross-sectional layout, filler bodies must be incorporated to maintain cross-section performance. Conventional design approaches based on manual experience suffer from inefficiency, high variability, and difficulties in quantification. This paper presents a multi-level automatic filling optimization design method for umbilical cross-sectional layouts to address these limitations. Initially, the research establishes a multi-objective optimization model that considers compactness, balance, and wear resistance of the cross-section, employing an enhanced genetic algorithm to achieve a near-optimal layout. Subsequently, the study implements an image processing-based vacancy detection technique to accurately identify cross-sectional gaps. To manage the variability and diversity of these vacant regions, the research introduces a multi-level filling method that strategically selects and places filler bodies of varying dimensions, overcoming the constraints of uniform-size fillers. Additionally, the method incorporates a hierarchical strategy that subdivides the complex cross-section into multiple layers, enabling layer-by-layer optimization and filling. This approach reduces manufacturing equipment requirements while ensuring practical production process feasibility. The methodology is validated through a specific umbilical case study. The results demonstrate improvements in compactness, balance, and wear resistance compared with the initial cross-section, offering novel insights and valuable references for filler design in umbilical cross-sections.
2025, 39(5): 904 -916
doi: 10.1007/s13344-025-0070-1
[Abstract](0)
Abstract:
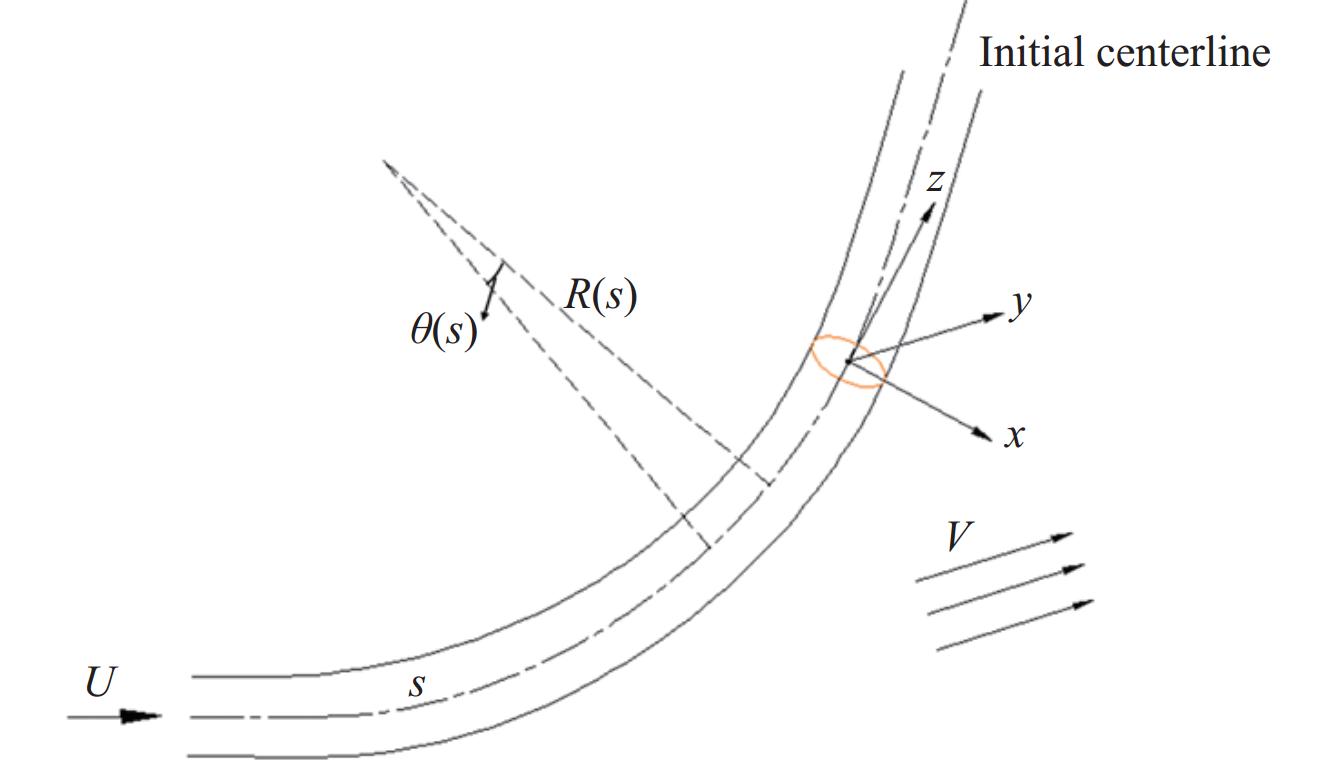
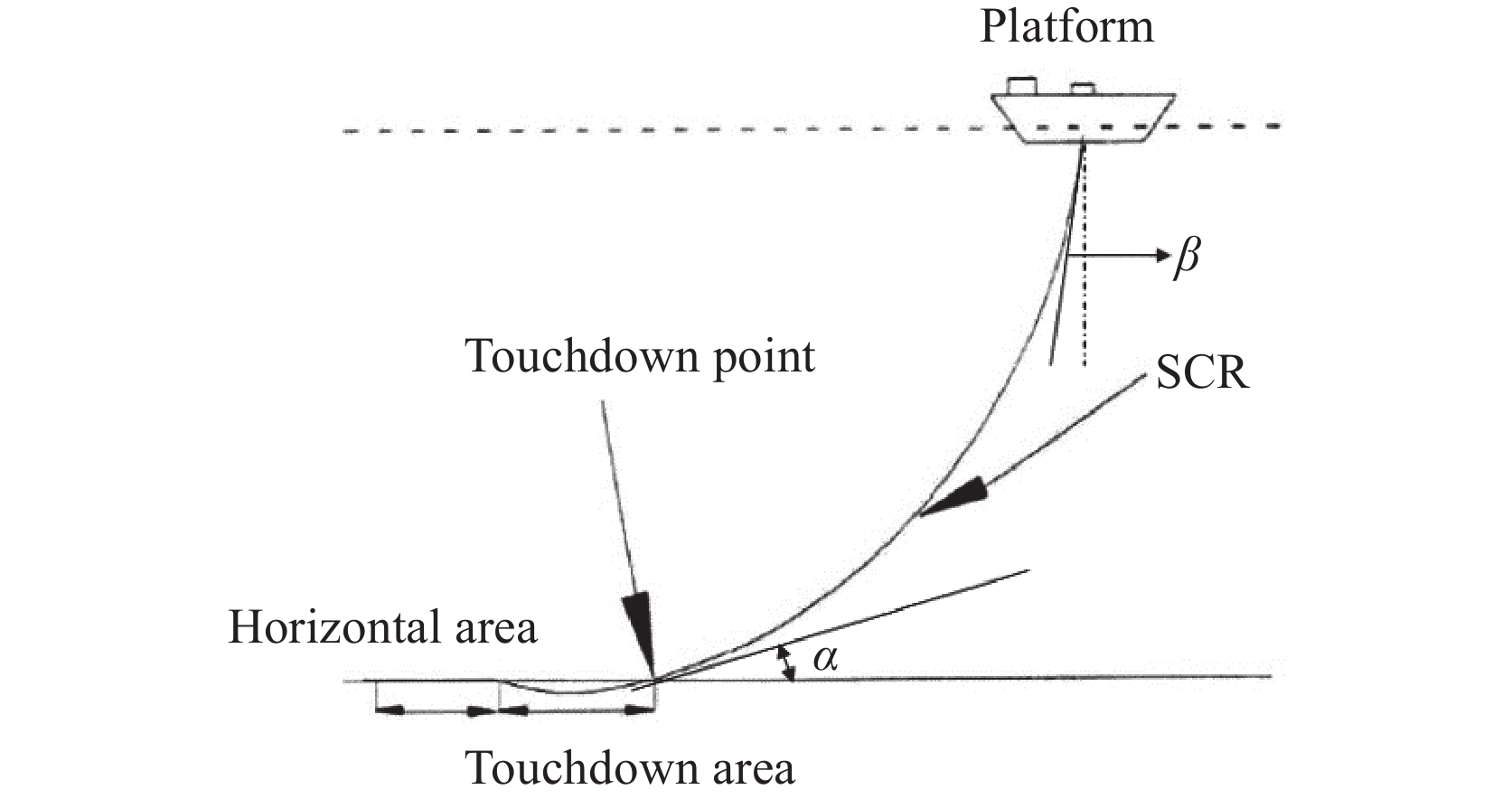
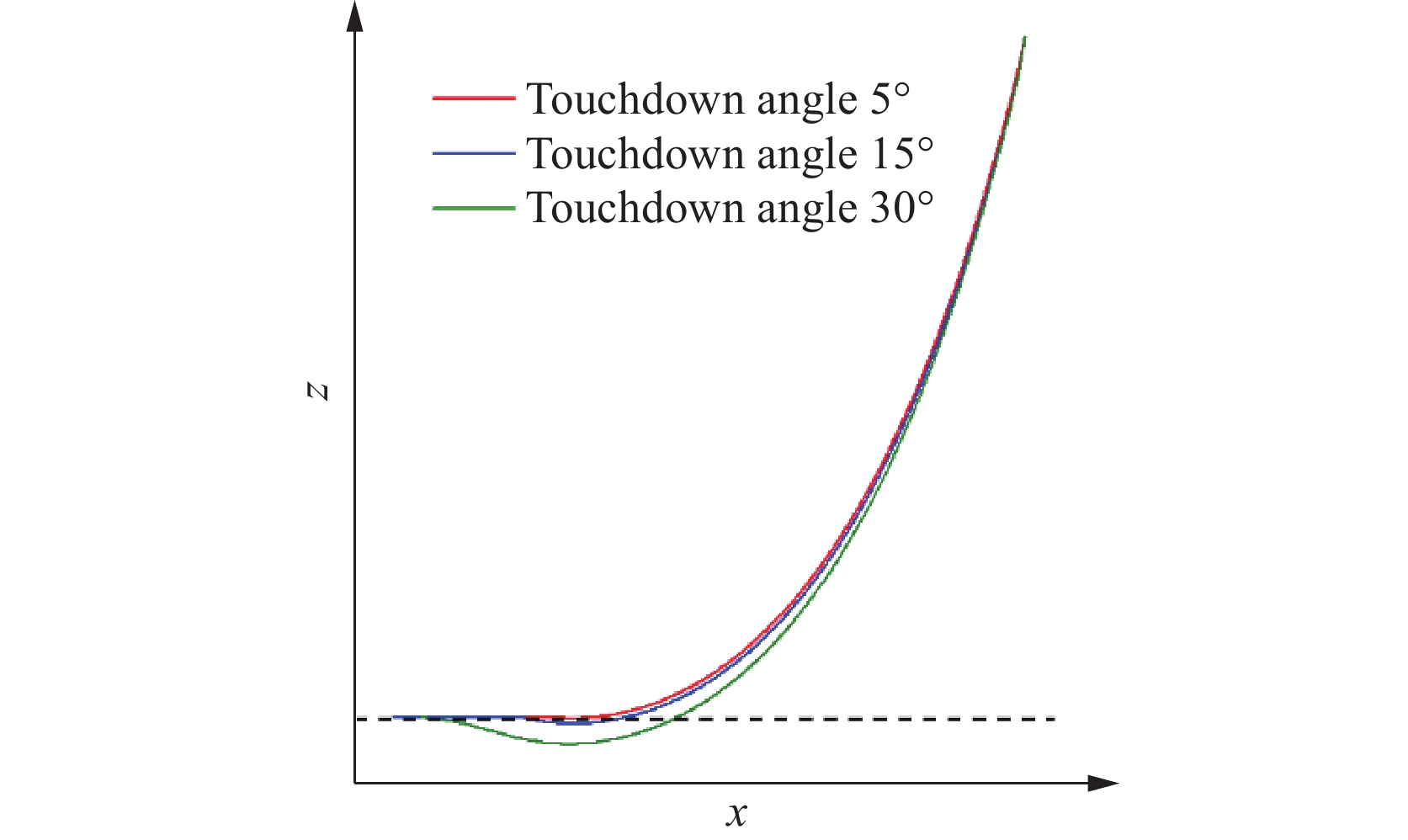
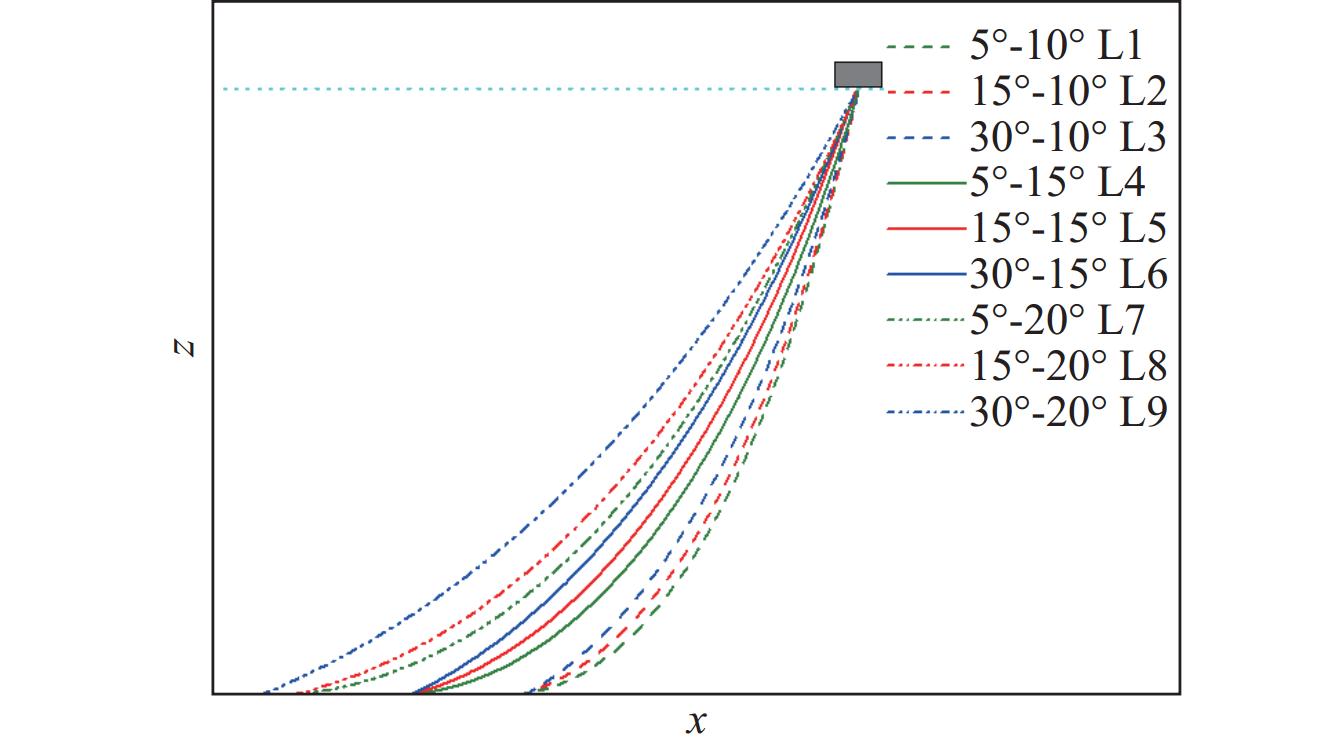
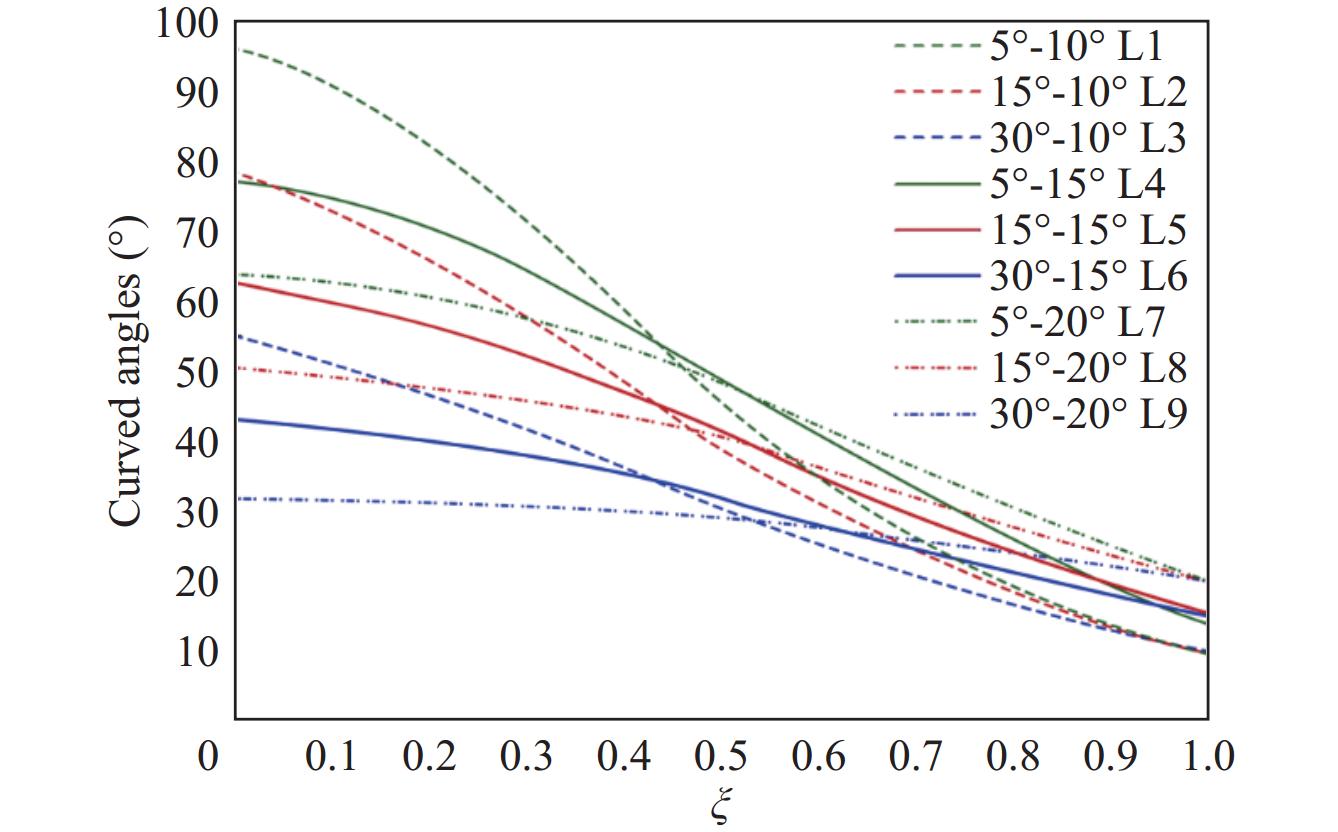
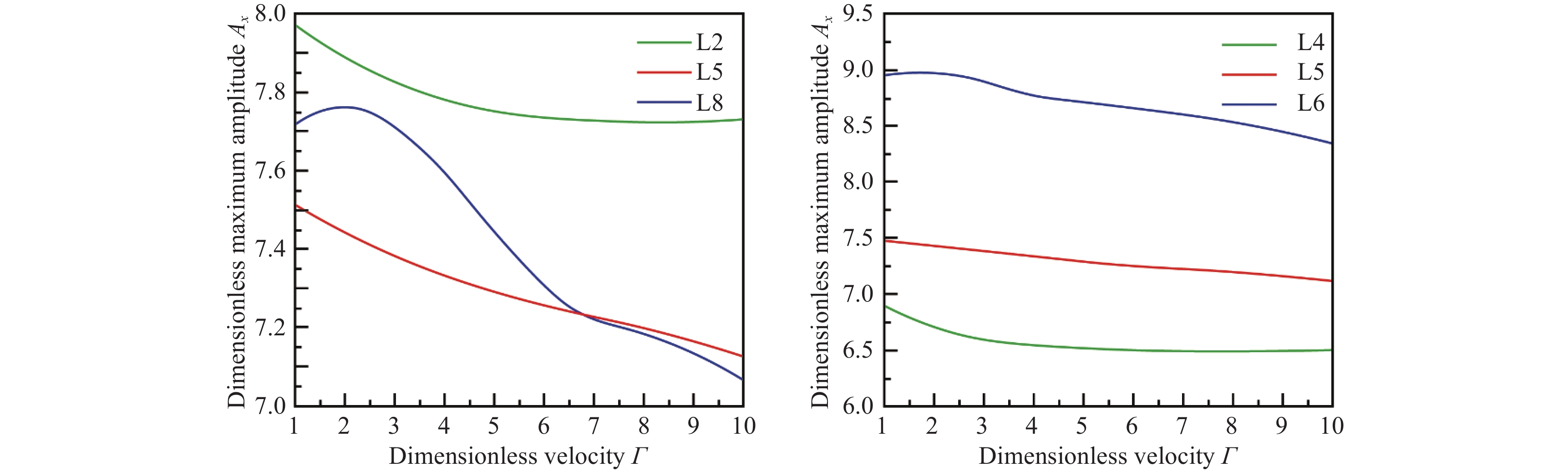
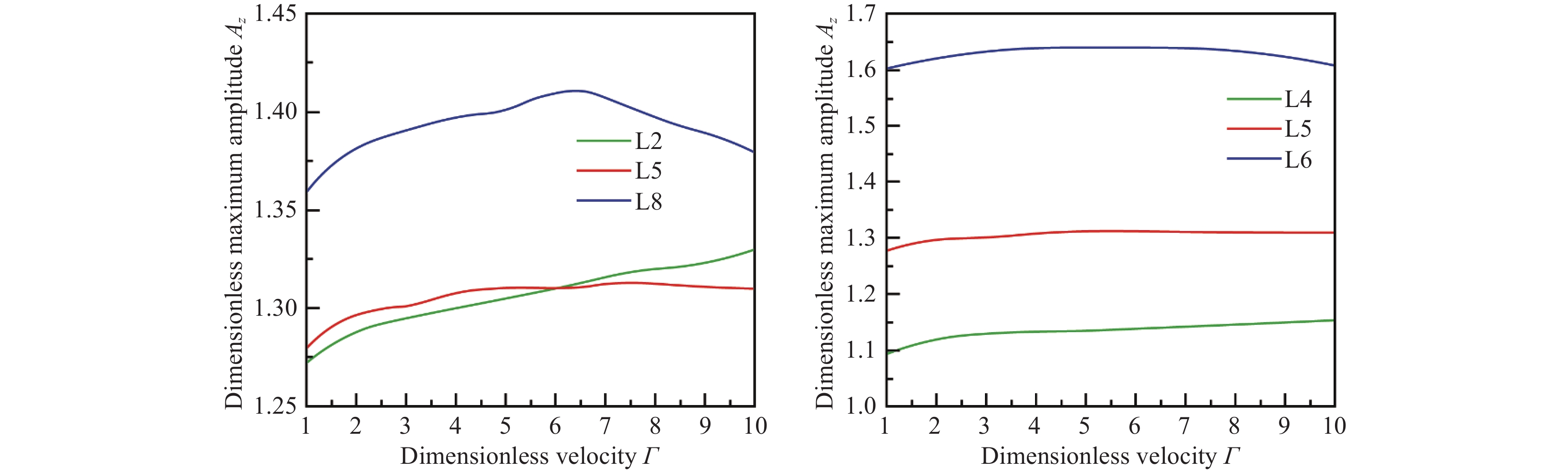
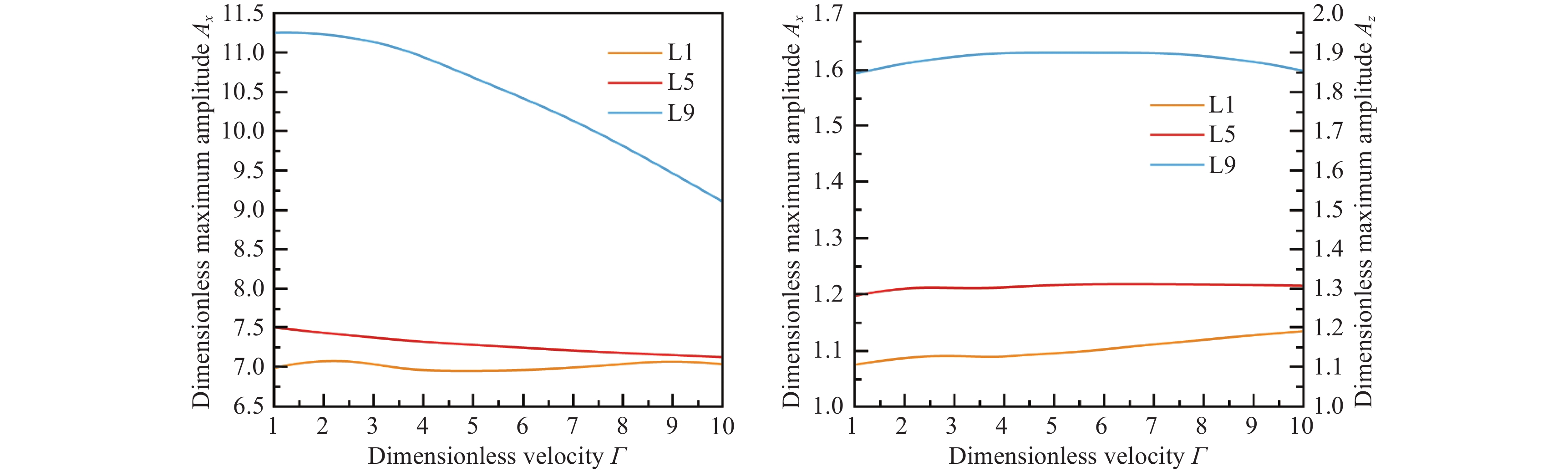
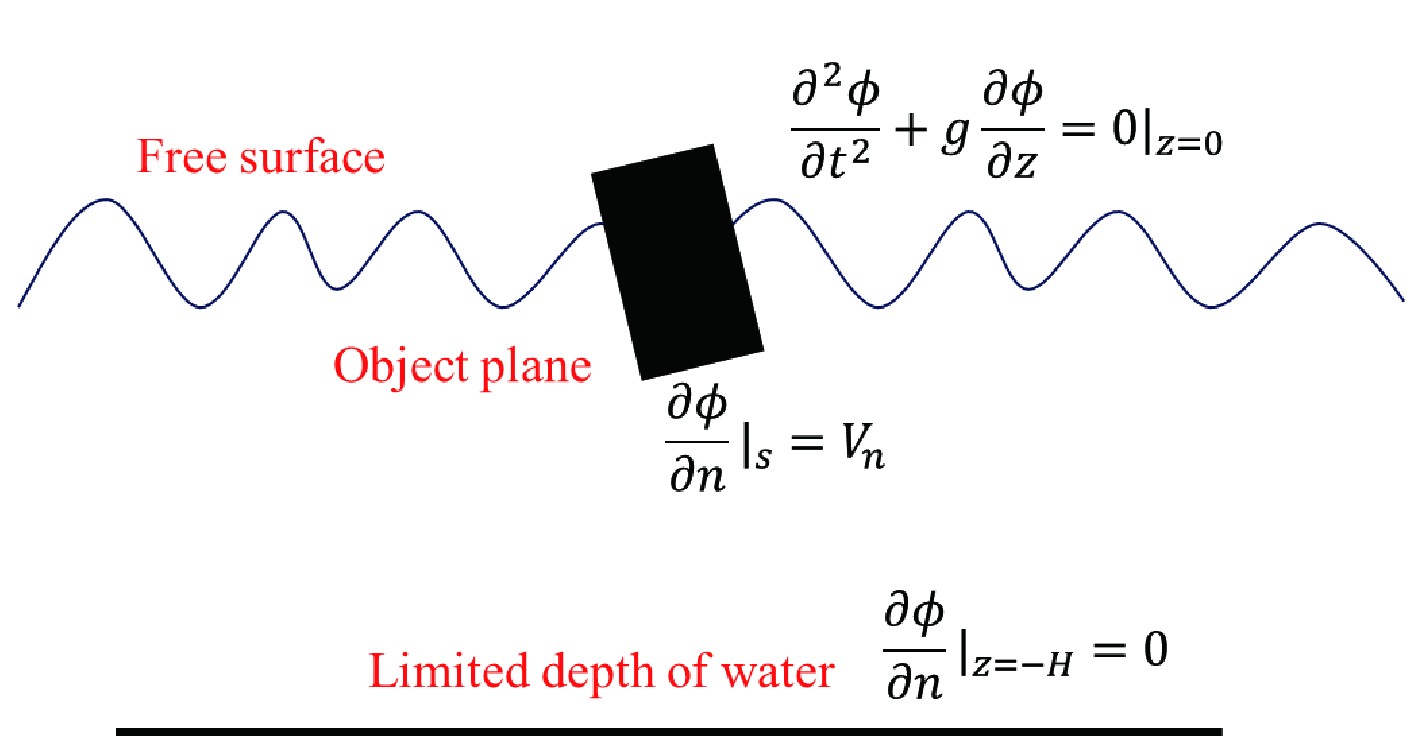
As oil and gas exploration moves into deeper waters, marine risers are subjected to increasingly complex service conditions, including vessel motions, ocean currents, seabed-soil interactions, and internal flow effects. This work establishes a dynamic behavior model of steel catenary risers (SCRs) with varying curvatures subjected to internal flow and external currents and considers the effects of pipe-soil interactions on the curvature profile. The governing equation is solved via the generalized integral transform technique (GITT), which yields a semi-analytical solution of a high-order nonlinear partial differential equation. Parametric studies are then performed to analyze the effects of varying curvature on the vibration frequency and amplitude of SCRs. The vibration frequency and amplitude increase with the touchdown angle and hang-off angle, although the effect of the hang-off angle is negligible. Additionally, as the curvature increases along the centerline axis, the position of the maximum amplitude of the SCR moves upward.
As oil and gas exploration moves into deeper waters, marine risers are subjected to increasingly complex service conditions, including vessel motions, ocean currents, seabed-soil interactions, and internal flow effects. This work establishes a dynamic behavior model of steel catenary risers (SCRs) with varying curvatures subjected to internal flow and external currents and considers the effects of pipe-soil interactions on the curvature profile. The governing equation is solved via the generalized integral transform technique (GITT), which yields a semi-analytical solution of a high-order nonlinear partial differential equation. Parametric studies are then performed to analyze the effects of varying curvature on the vibration frequency and amplitude of SCRs. The vibration frequency and amplitude increase with the touchdown angle and hang-off angle, although the effect of the hang-off angle is negligible. Additionally, as the curvature increases along the centerline axis, the position of the maximum amplitude of the SCR moves upward.
2025, 39(5): 917 -927
doi: 10.1007/s13344-025-0071-0
[Abstract](0)
Abstract:
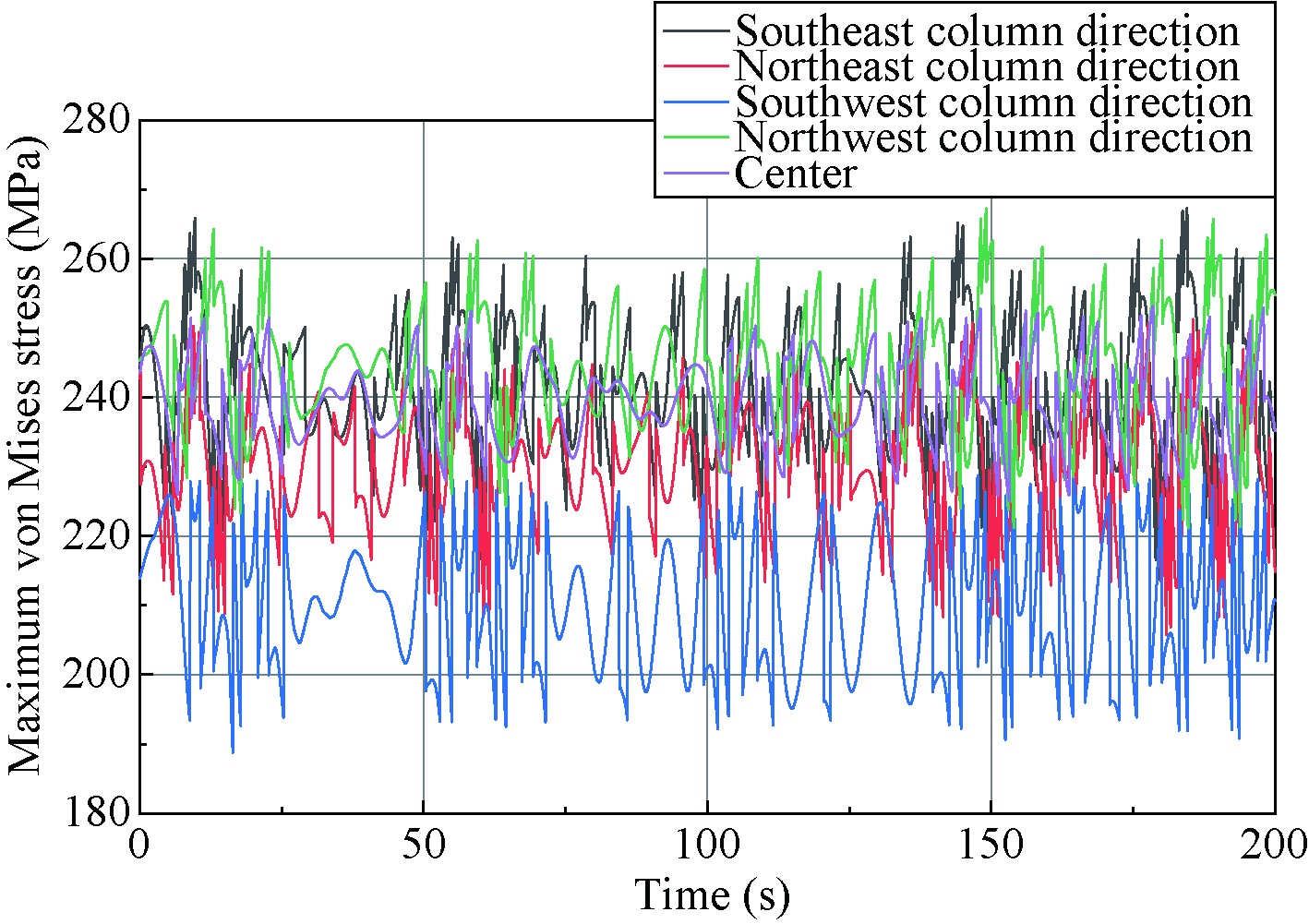
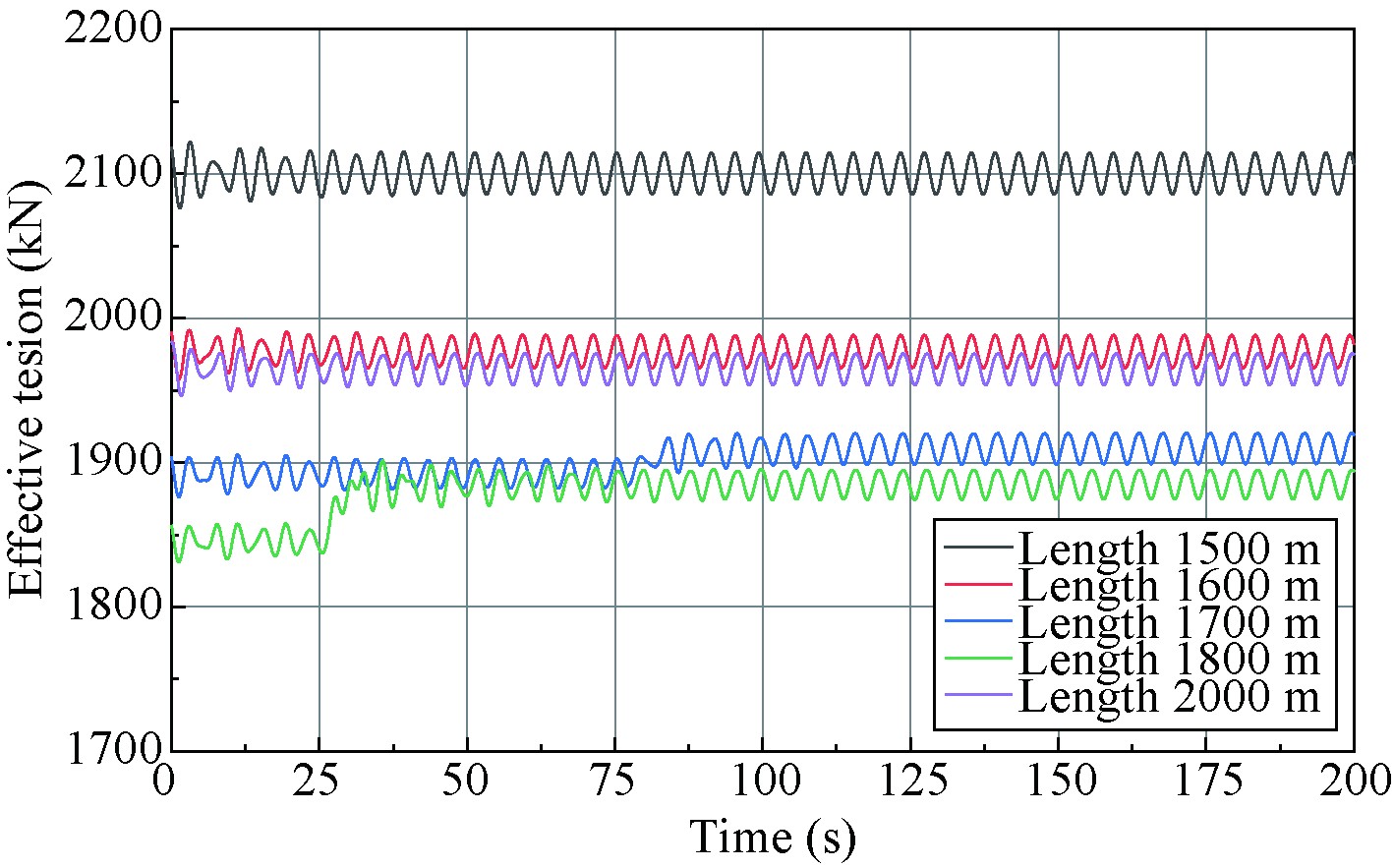
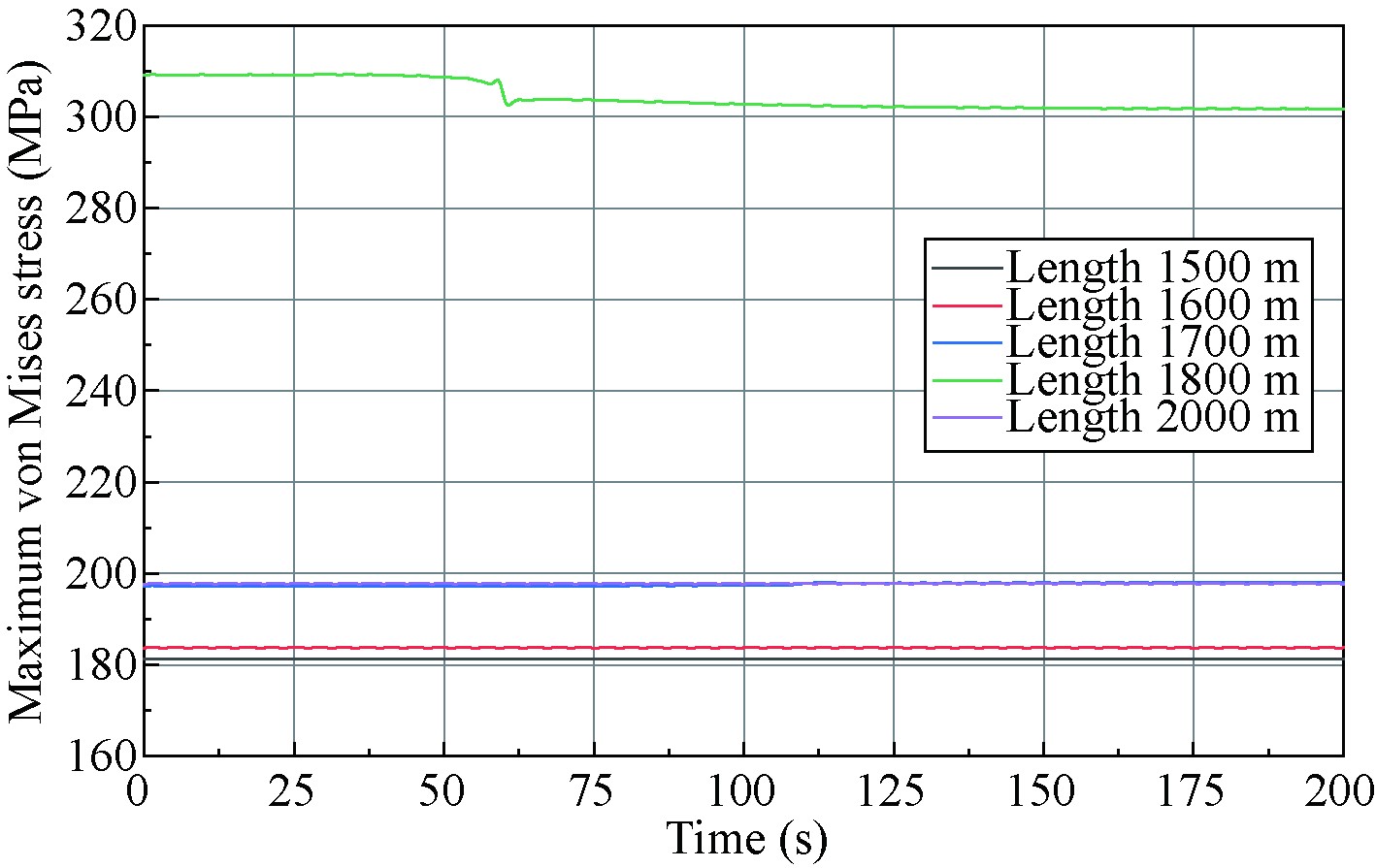
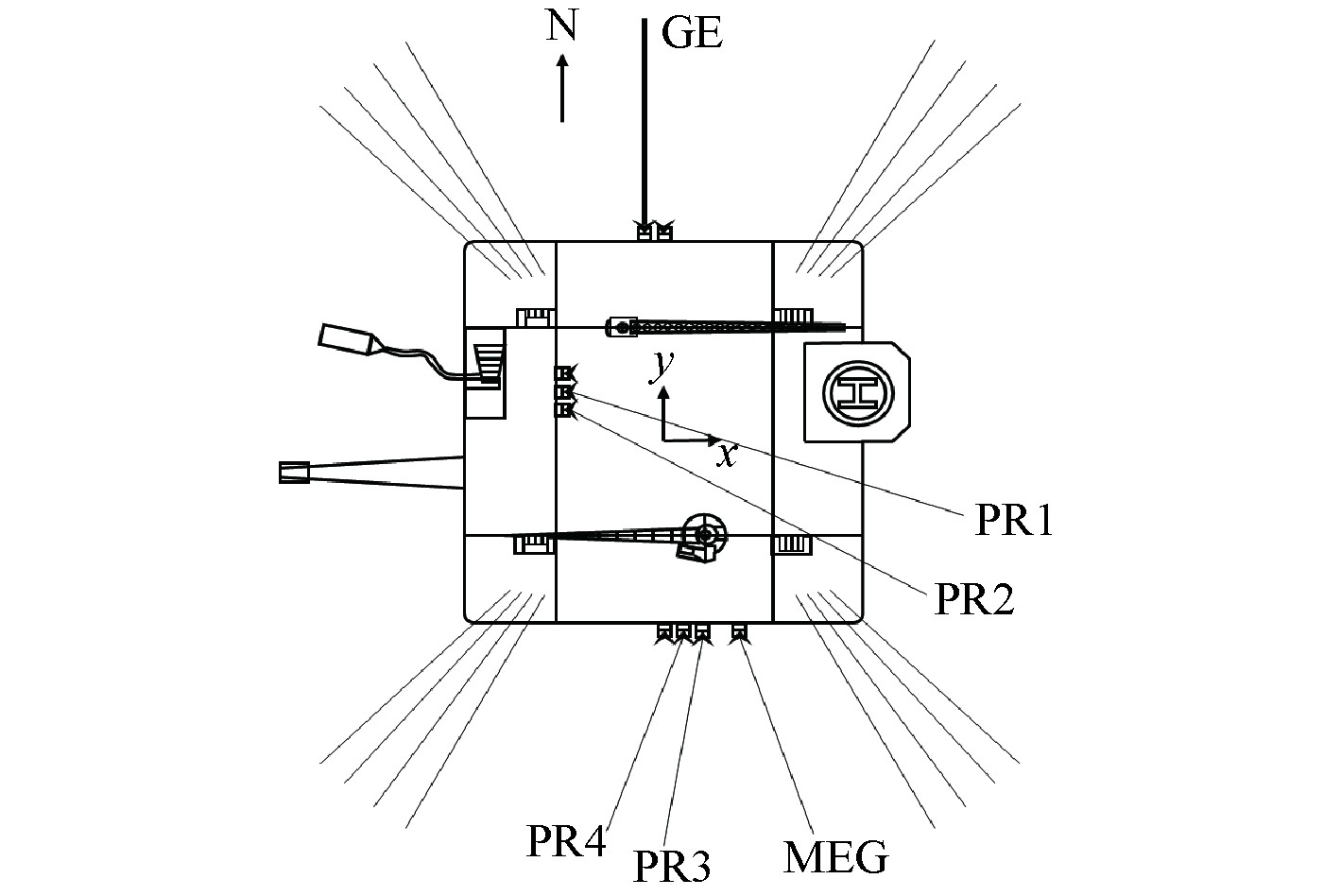
Steel catenary riser represents the pioneering riser technology implemented in China’s deep-sea oil and gas operations. Given the complex mechanical conditions of the riser, extensive research has been conducted on its dynamic analysis and structural design. This study investigates a deep-sea oil and gas field by developing a coupled model of a semi-submersible platform and steel catenary riser to analyze it mechanical behavior under extreme marine conditions. Through multi-objective optimization methodology, the study compares and analyzes suspension point tension and touchdown point stress under various conditions by modifying the suspension position, suspension angle, and catenary length. The optimal configuration parameters were determined: a suspension angle of 12°, suspension position in the southwest direction of the column, and a catenary length of approximately 2000 m. These findings elucidate the impact of configuration parameters on riser dynamic response and establish reasonable parameter layout ranges for adverse sea conditions, offering valuable optimization strategies for steel catenary riser deployment in domestic deep-sea oil and gas fields.
Steel catenary riser represents the pioneering riser technology implemented in China’s deep-sea oil and gas operations. Given the complex mechanical conditions of the riser, extensive research has been conducted on its dynamic analysis and structural design. This study investigates a deep-sea oil and gas field by developing a coupled model of a semi-submersible platform and steel catenary riser to analyze it mechanical behavior under extreme marine conditions. Through multi-objective optimization methodology, the study compares and analyzes suspension point tension and touchdown point stress under various conditions by modifying the suspension position, suspension angle, and catenary length. The optimal configuration parameters were determined: a suspension angle of 12°, suspension position in the southwest direction of the column, and a catenary length of approximately 2000 m. These findings elucidate the impact of configuration parameters on riser dynamic response and establish reasonable parameter layout ranges for adverse sea conditions, offering valuable optimization strategies for steel catenary riser deployment in domestic deep-sea oil and gas fields.



2025, 39(5): 928 -940
doi: 10.1007/s13344-025-0072-z
[Abstract](0)
Abstract:
This study examines the adaptive boundary control problem of flexible marine riser with internal flow coupling. The dynamic model of the flexible marine riser system with internal flow coupling is derived using the Hamiltonian principle. An analysis of internal flow’s influence on the vibration characteristics of flexible marine risers is conducted. Then, for the uncertain environmental disturbance, the adaptive fuzzy logic system is introduced to dynamically approximate the boundary disturbance, and a robust adaptive fuzzy boundary control is proposed. The uniform boundedness of the closed-loop system is proved based on Lyapunov theory. The well-posedness of the closed-loop system is proved by operator semigroup theory. The proposed control’s effectiveness is validated through comparison with existing control methods.
This study examines the adaptive boundary control problem of flexible marine riser with internal flow coupling. The dynamic model of the flexible marine riser system with internal flow coupling is derived using the Hamiltonian principle. An analysis of internal flow’s influence on the vibration characteristics of flexible marine risers is conducted. Then, for the uncertain environmental disturbance, the adaptive fuzzy logic system is introduced to dynamically approximate the boundary disturbance, and a robust adaptive fuzzy boundary control is proposed. The uniform boundedness of the closed-loop system is proved based on Lyapunov theory. The well-posedness of the closed-loop system is proved by operator semigroup theory. The proposed control’s effectiveness is validated through comparison with existing control methods.
2025, 39(5): 941 -955
doi: 10.1007/s13344-025-0074-x
[Abstract](0)
Abstract:
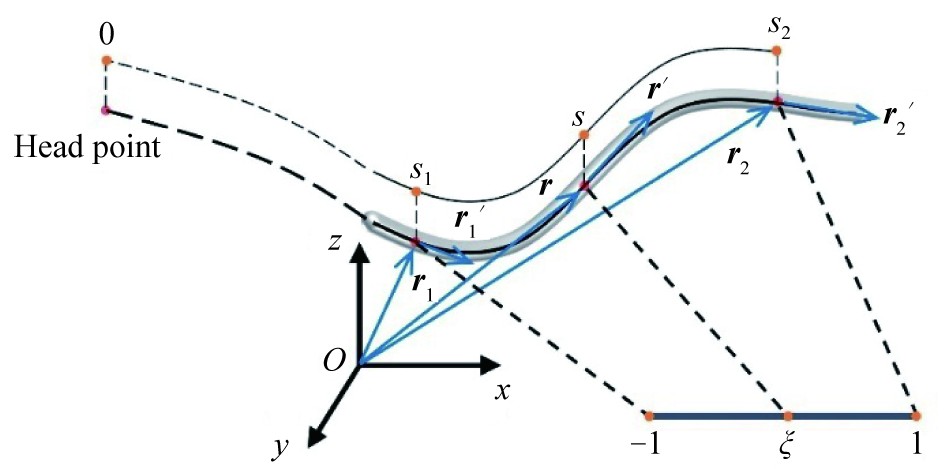
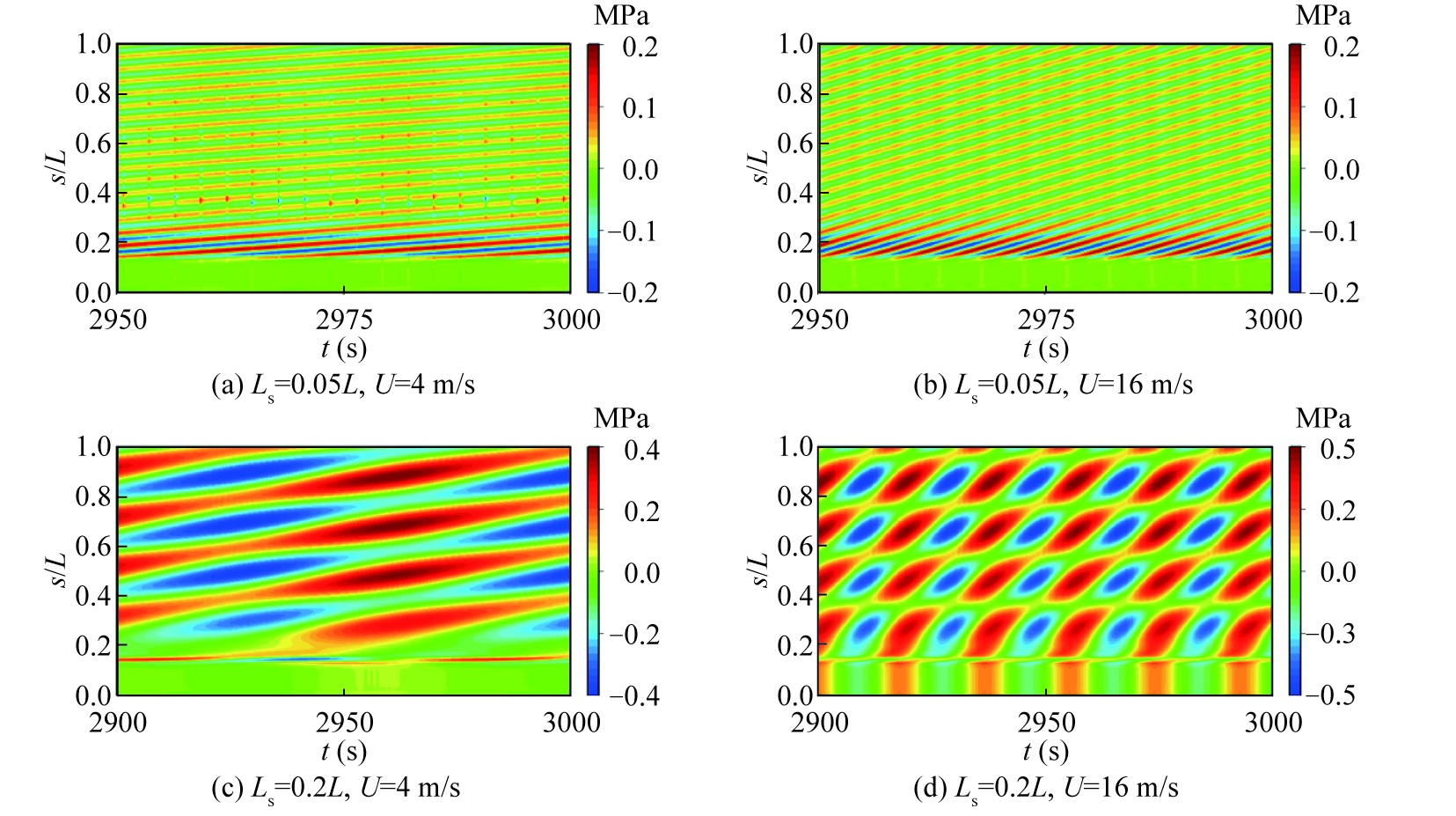
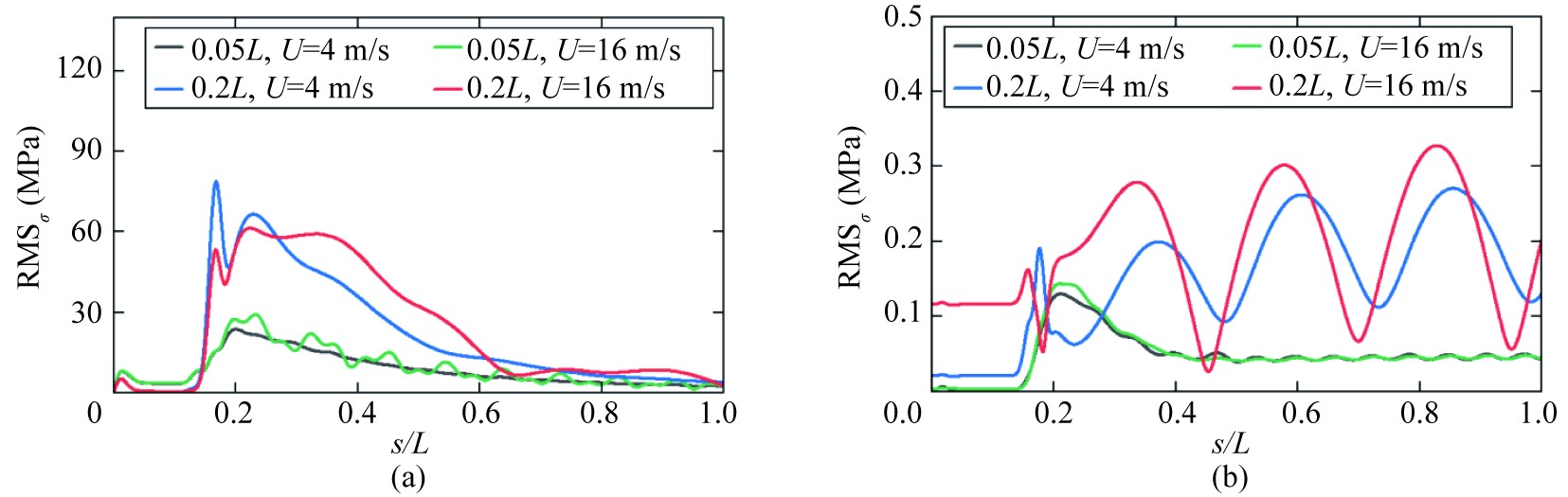
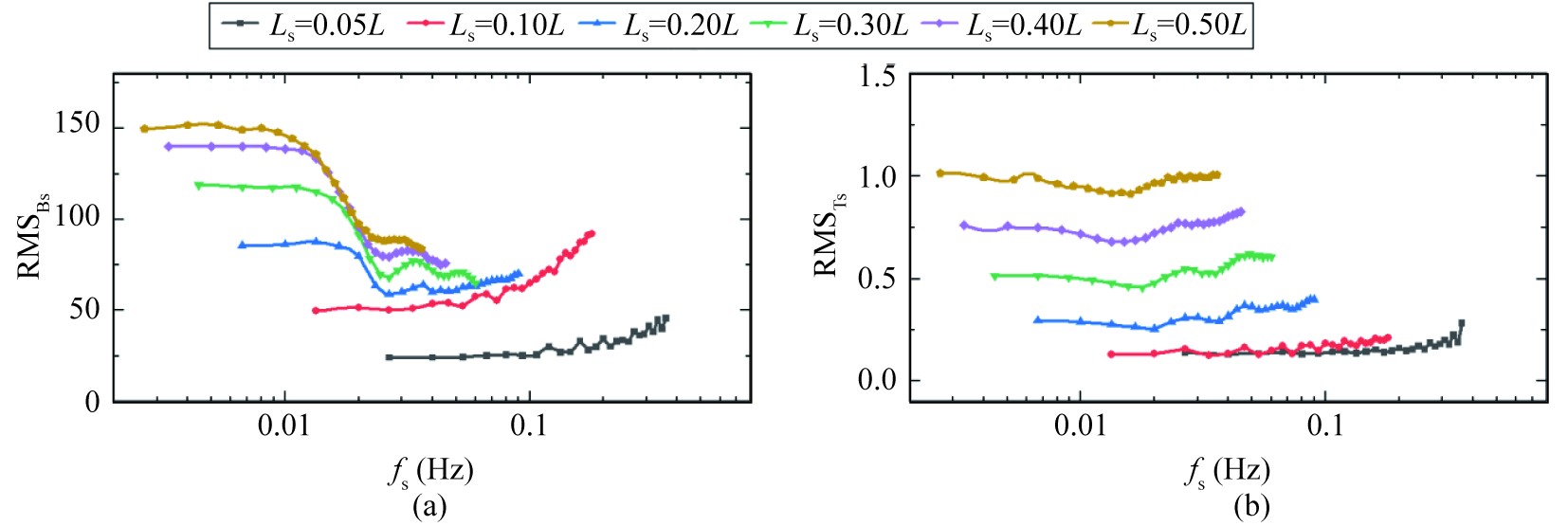
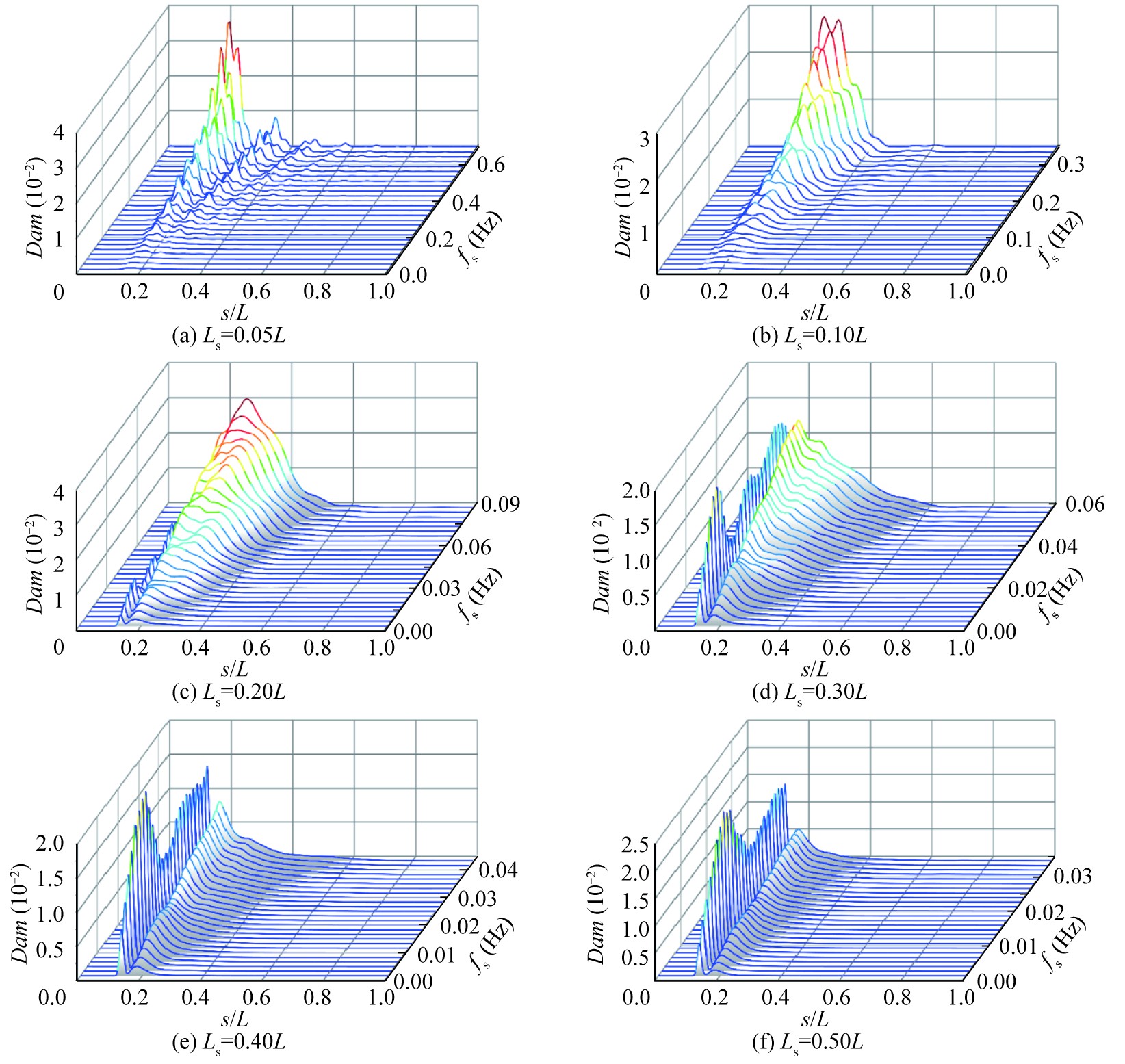
This study examines the slug-induced vibration (SIV) response and fatigue behavior of offshore risers subjected to internal slug flow. A structural model incorporating internal slug flow dynamics is developed using the Absolute Nodal Coordinate Formulation (ANCF) and a spatial-temporal density variation equation to analyze how slug flow parameters affect the SIV response of risers. Structural displacement, stress, and fatigue responses are systematically evaluated to characterize the structural behavior under SIV conditions. Longer slugs induce more pronounced traveling wave characteristics, while shorter slugs facilitate a mixed traveling-standing wave mode. Moreover, higher slug frequencies lead to increased fatigue accumulation, especially over an extended touchdown zone, thereby compromising the structural integrity of the riser. The findings yield valuable insights into the dynamic interactions between slug flow and riser response. This research advances the understanding of SIV mechanisms and provides a theoretical foundation for fatigue assessment and structural optimization, contributing to the safe and efficient design of offshore risers in deepwater environments.
This study examines the slug-induced vibration (SIV) response and fatigue behavior of offshore risers subjected to internal slug flow. A structural model incorporating internal slug flow dynamics is developed using the Absolute Nodal Coordinate Formulation (ANCF) and a spatial-temporal density variation equation to analyze how slug flow parameters affect the SIV response of risers. Structural displacement, stress, and fatigue responses are systematically evaluated to characterize the structural behavior under SIV conditions. Longer slugs induce more pronounced traveling wave characteristics, while shorter slugs facilitate a mixed traveling-standing wave mode. Moreover, higher slug frequencies lead to increased fatigue accumulation, especially over an extended touchdown zone, thereby compromising the structural integrity of the riser. The findings yield valuable insights into the dynamic interactions between slug flow and riser response. This research advances the understanding of SIV mechanisms and provides a theoretical foundation for fatigue assessment and structural optimization, contributing to the safe and efficient design of offshore risers in deepwater environments.
2025, 39(5): 956 -970
doi: 10.1007/s13344-025-0075-9
[Abstract](0)
Abstract:
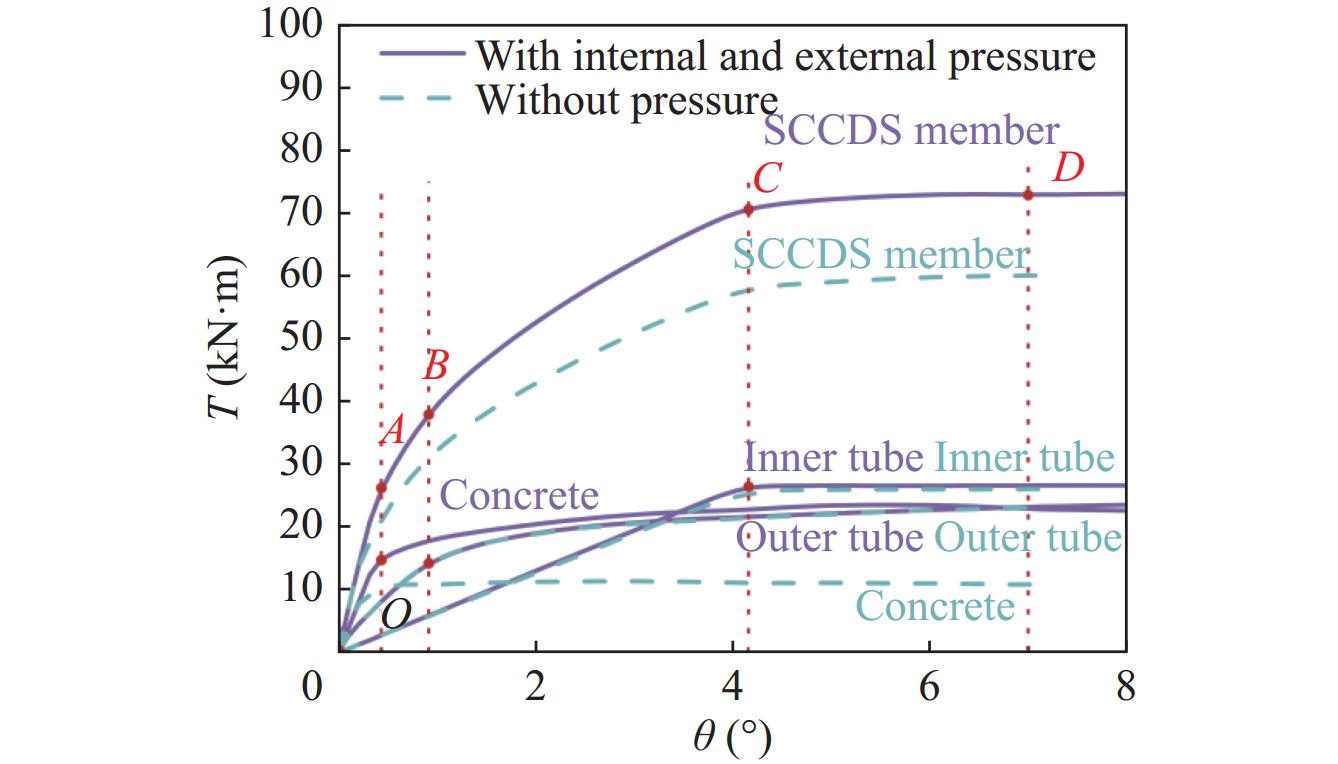
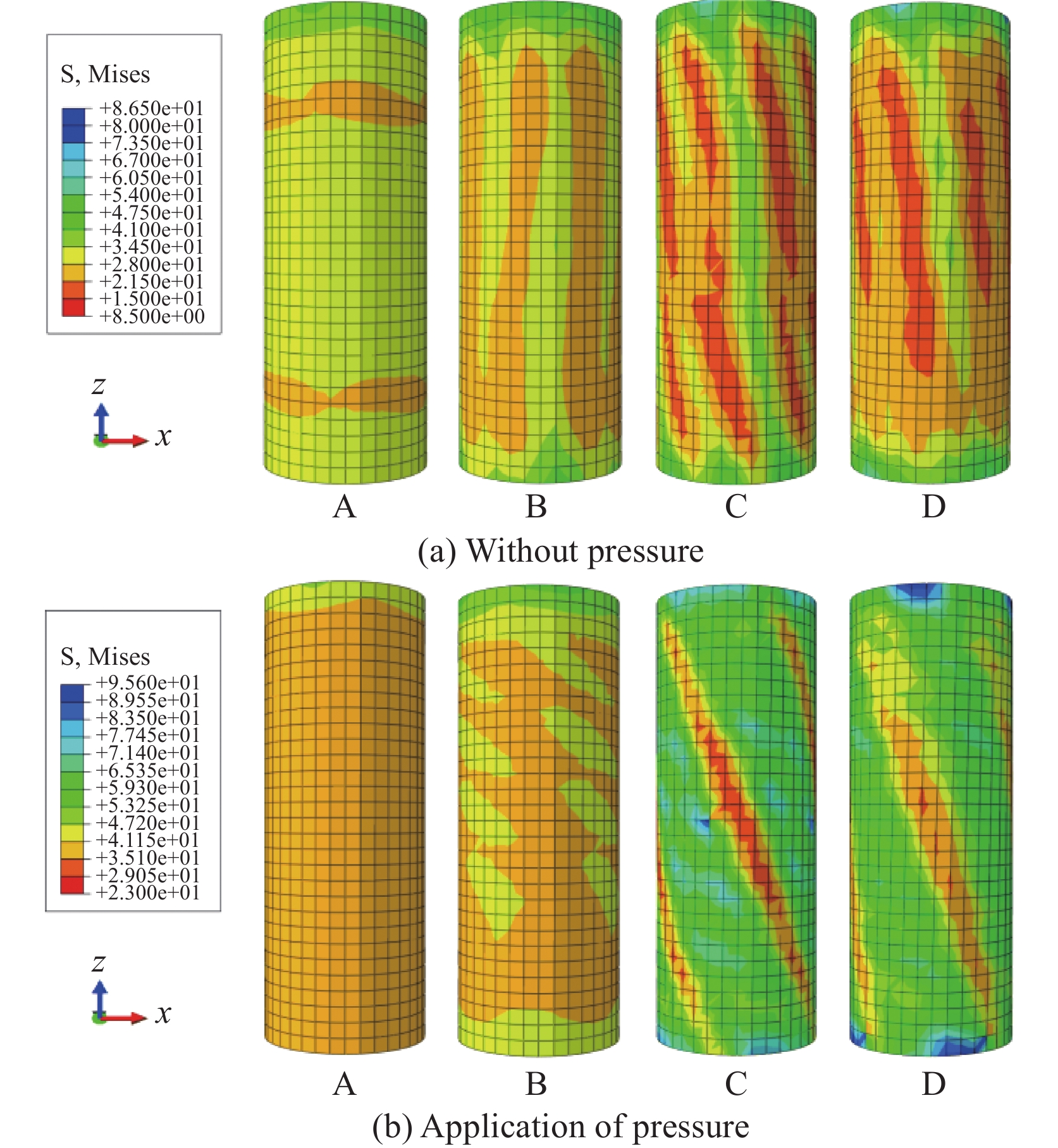
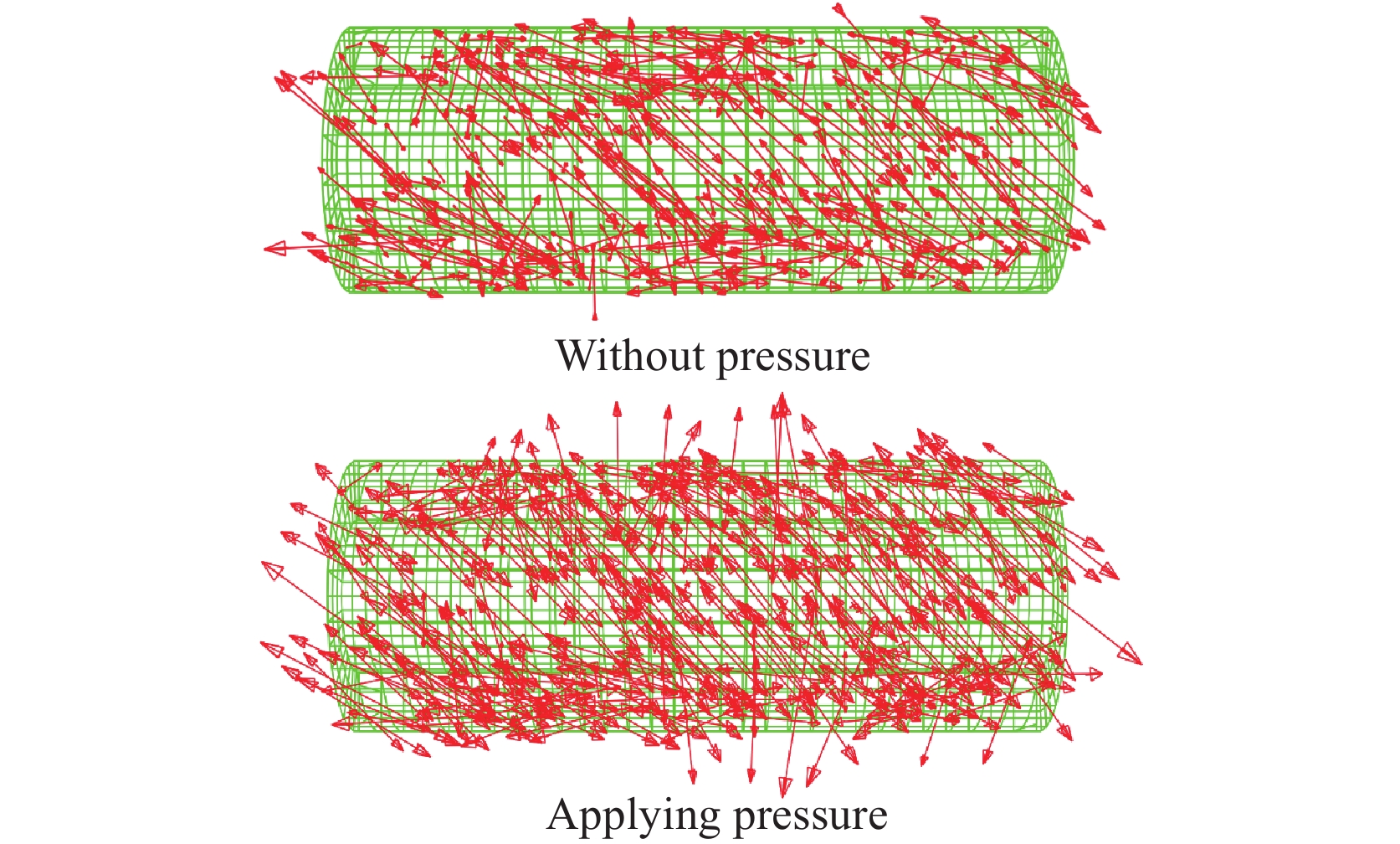
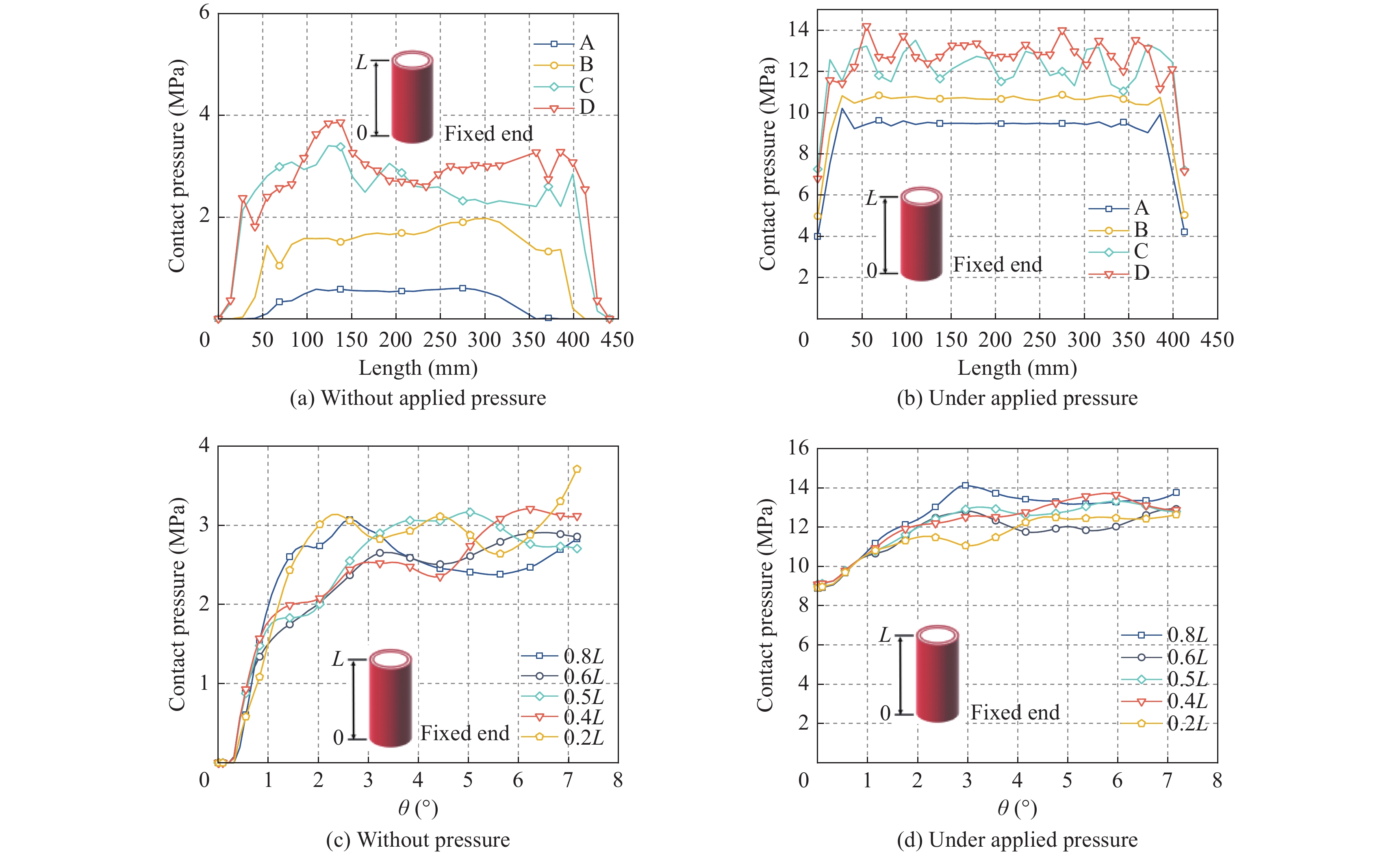
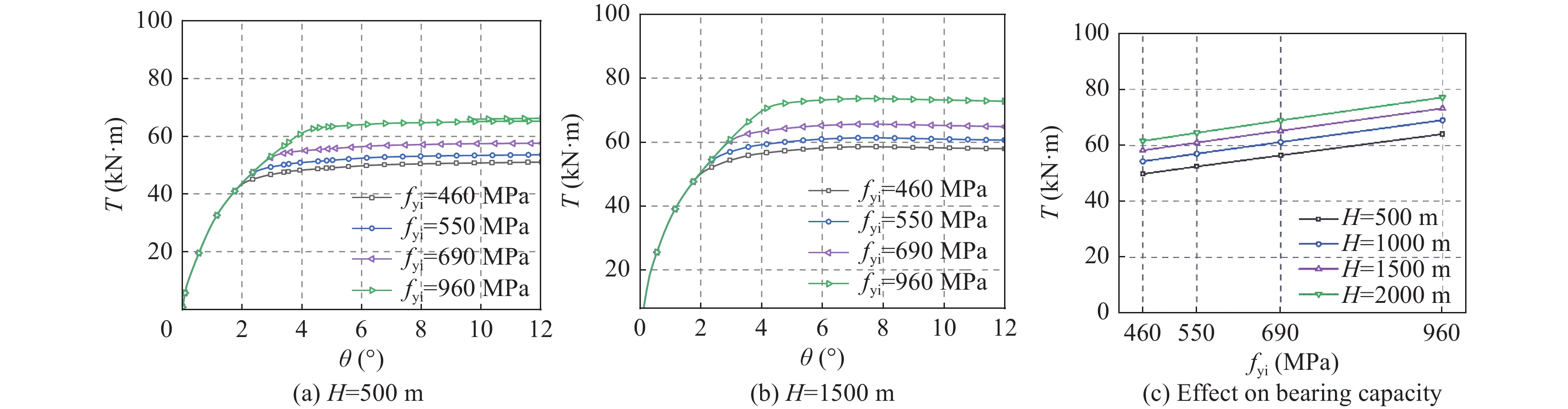
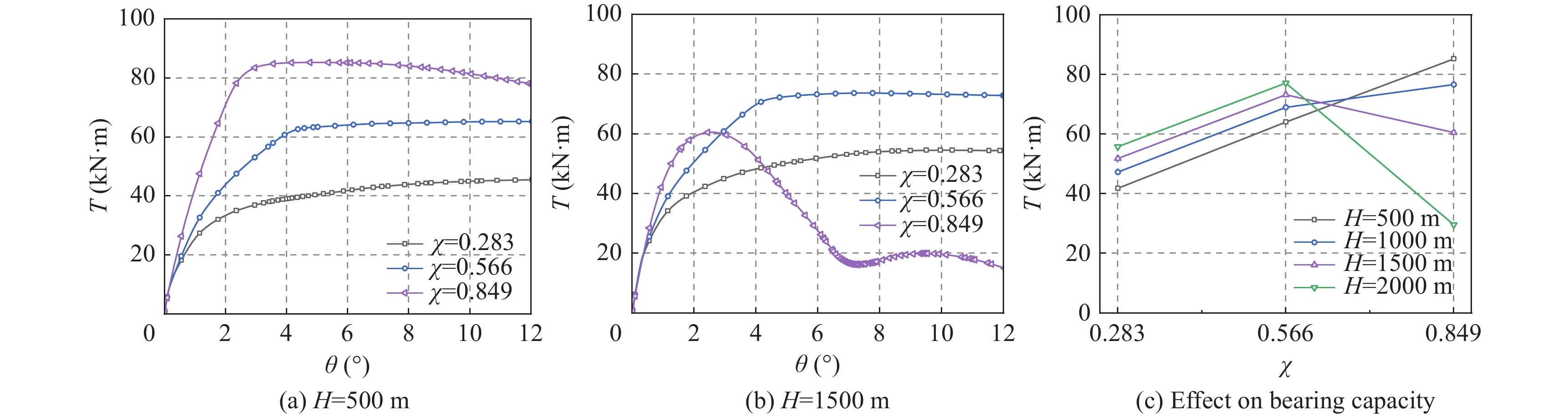
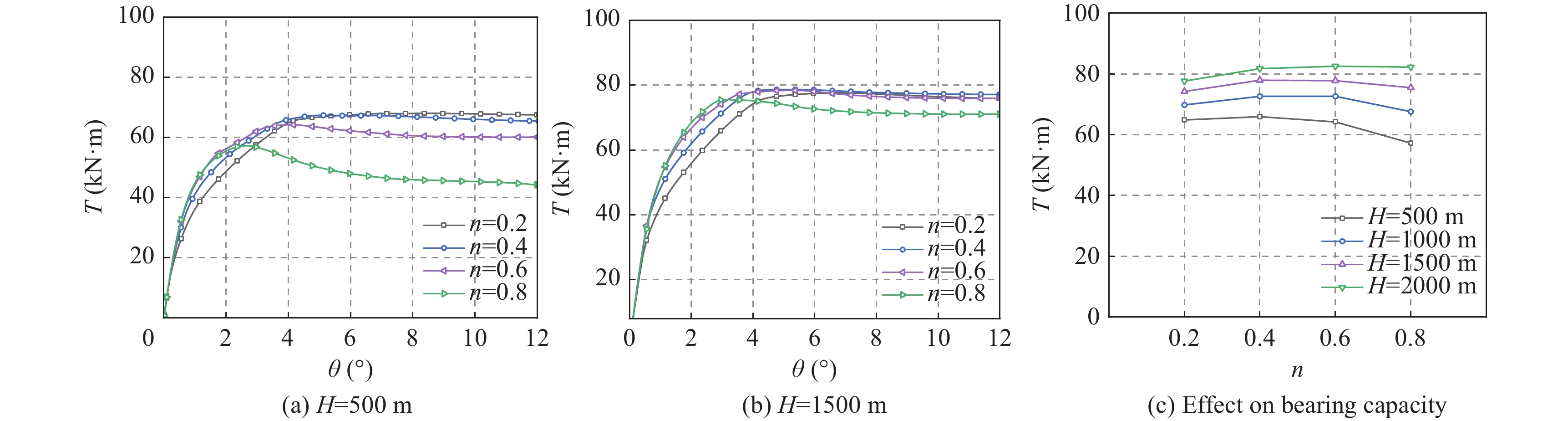
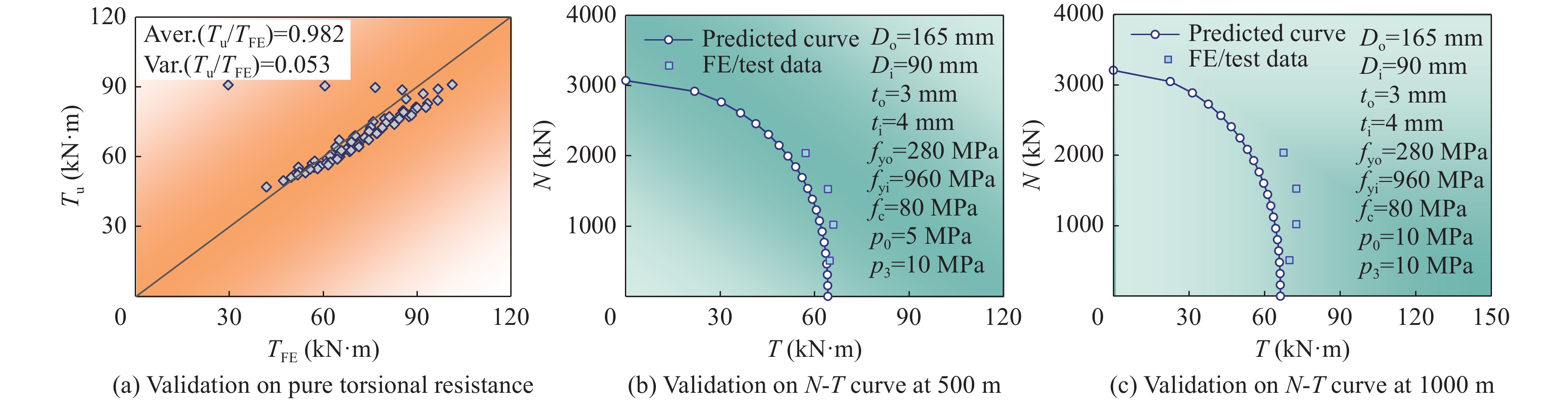
The recently developed SCCDS composite tube, a novel variant of the pipe-in-pipe (PIP) structure, demonstrates strong potential for subsea pipeline applications. However, theoretical research regarding its structural behavior under compression-torsion loading and bearing capacity calculations remains limited, particularly concerning the influence of dual hydraulic pressures during operation. This study examines the impact of dual hydraulic pressures on the compressive-torsional behavior of SCCDS composite tubes. A finite element (FE) model was developed and validated against experimental results, comparing failure modes, full-range loading curves, and bearing capacity to elucidate the working mechanism under dual pressures. A parametric study was then conducted to examine the effects of geometric-physical parameters. Results demonstrate that dual pressures substantially enhance the bearing capacity of sandwich concrete by increasing the normal contact stress at the interface. Increasing concrete strength (fc) provides minimal enhancement to torsional resistance compared to the yielding strengths of outer tube (fyo) and inner tube (fyi). Higher diameter-to-thickness ratios of outer tube (Do/to) and inner tube (Di/ti) significantly reduce torsional capacity. At 1000 m water depth, increasing the Do/to ratio from 27.5 to 36.67, 55, and 110 reduces bearing capacity by 11.17%, 23.08%, and 36.14% respectively. Strict measures should be implemented to prevent substantial reductions in strength and ductility for SCCDS composite tubes with large hollow ratios (e.g., χ=0.849) or high axial compression ratios (e.g., n=0.8). The study proposes a modified calculation method for determining N-T curves that incorporates dual hydraulic pressure effects, providing guidance for performance evaluation of novel SCCDS composite tubes in deep-sea engineering.
The recently developed SCCDS composite tube, a novel variant of the pipe-in-pipe (PIP) structure, demonstrates strong potential for subsea pipeline applications. However, theoretical research regarding its structural behavior under compression-torsion loading and bearing capacity calculations remains limited, particularly concerning the influence of dual hydraulic pressures during operation. This study examines the impact of dual hydraulic pressures on the compressive-torsional behavior of SCCDS composite tubes. A finite element (FE) model was developed and validated against experimental results, comparing failure modes, full-range loading curves, and bearing capacity to elucidate the working mechanism under dual pressures. A parametric study was then conducted to examine the effects of geometric-physical parameters. Results demonstrate that dual pressures substantially enhance the bearing capacity of sandwich concrete by increasing the normal contact stress at the interface. Increasing concrete strength (fc) provides minimal enhancement to torsional resistance compared to the yielding strengths of outer tube (fyo) and inner tube (fyi). Higher diameter-to-thickness ratios of outer tube (Do/to) and inner tube (Di/ti) significantly reduce torsional capacity. At 1000 m water depth, increasing the Do/to ratio from 27.5 to 36.67, 55, and 110 reduces bearing capacity by 11.17%, 23.08%, and 36.14% respectively. Strict measures should be implemented to prevent substantial reductions in strength and ductility for SCCDS composite tubes with large hollow ratios (e.g., χ=0.849) or high axial compression ratios (e.g., n=0.8). The study proposes a modified calculation method for determining N-T curves that incorporates dual hydraulic pressure effects, providing guidance for performance evaluation of novel SCCDS composite tubes in deep-sea engineering.



2025, 39(5): 971 -983
doi: 10.1007/s13344-025-0073-y
[Abstract](0)
Abstract:
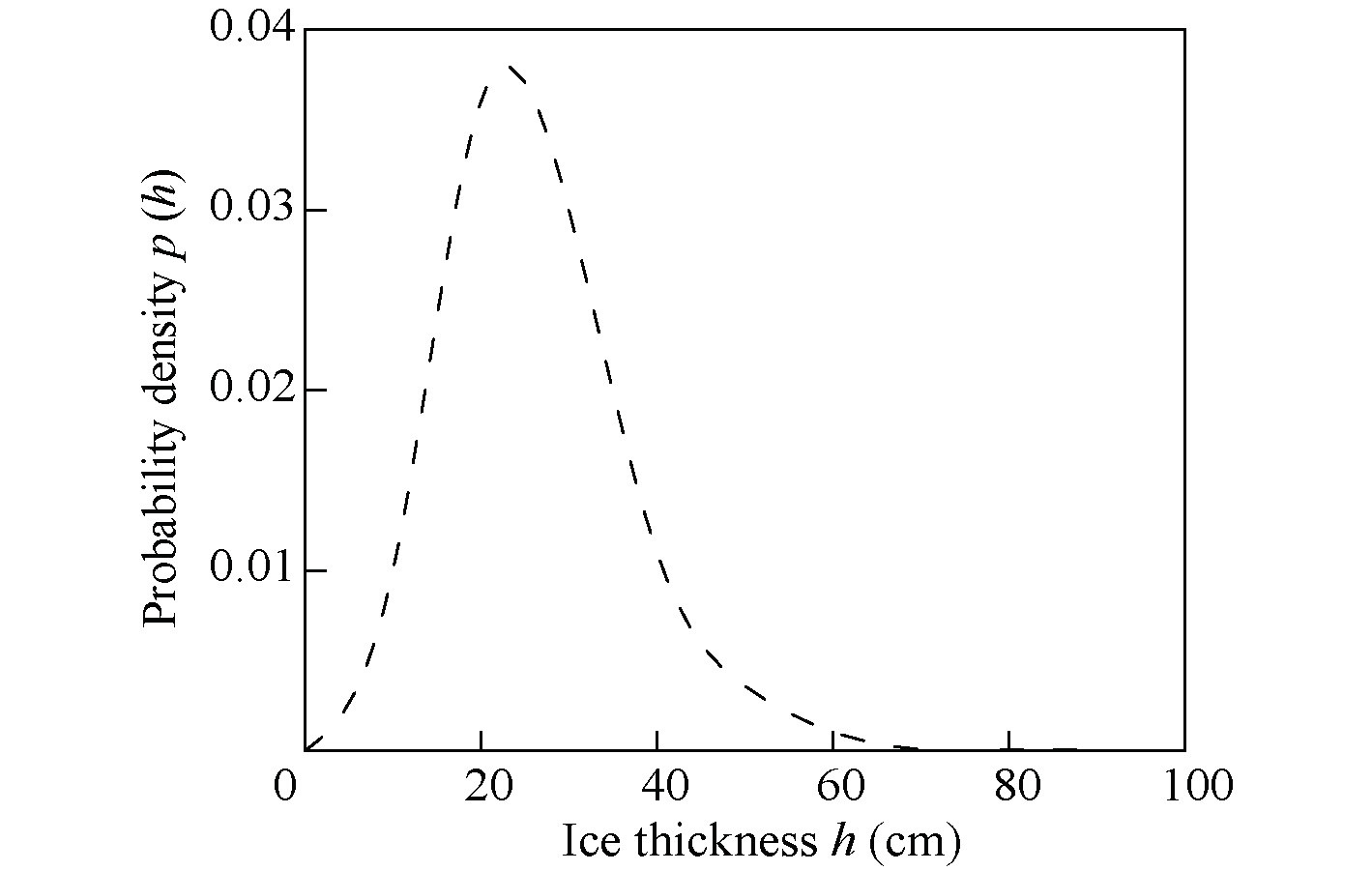
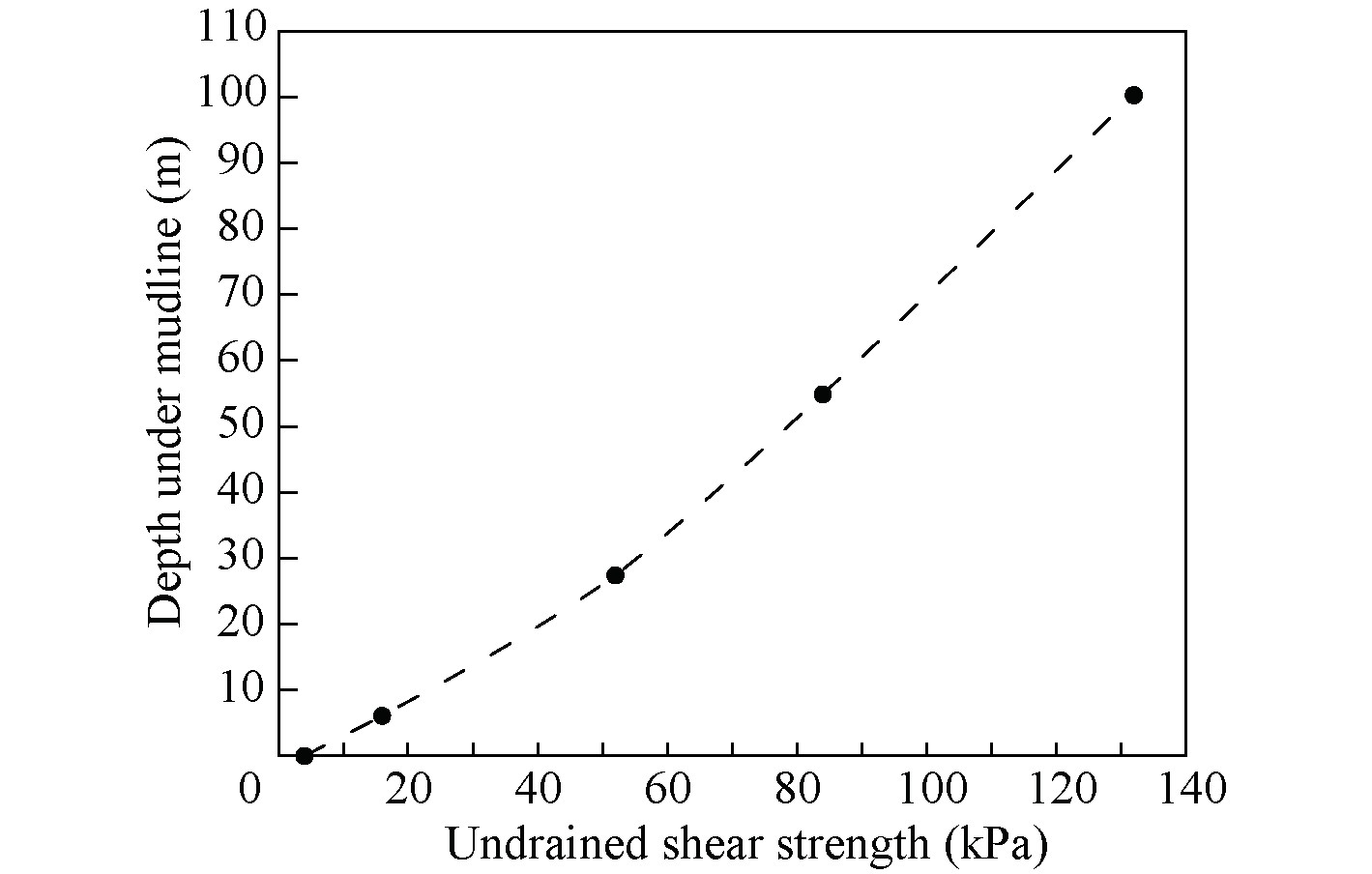
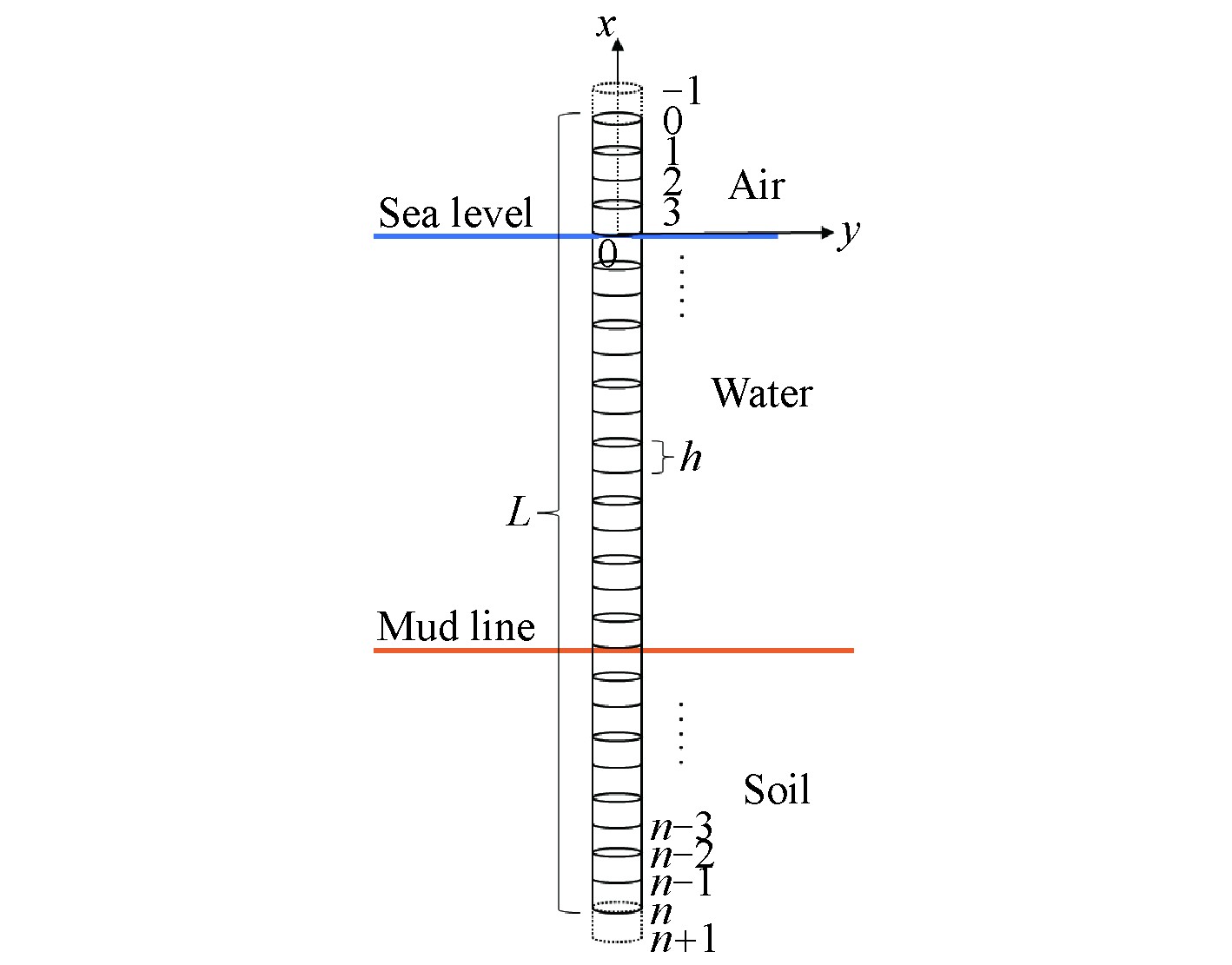
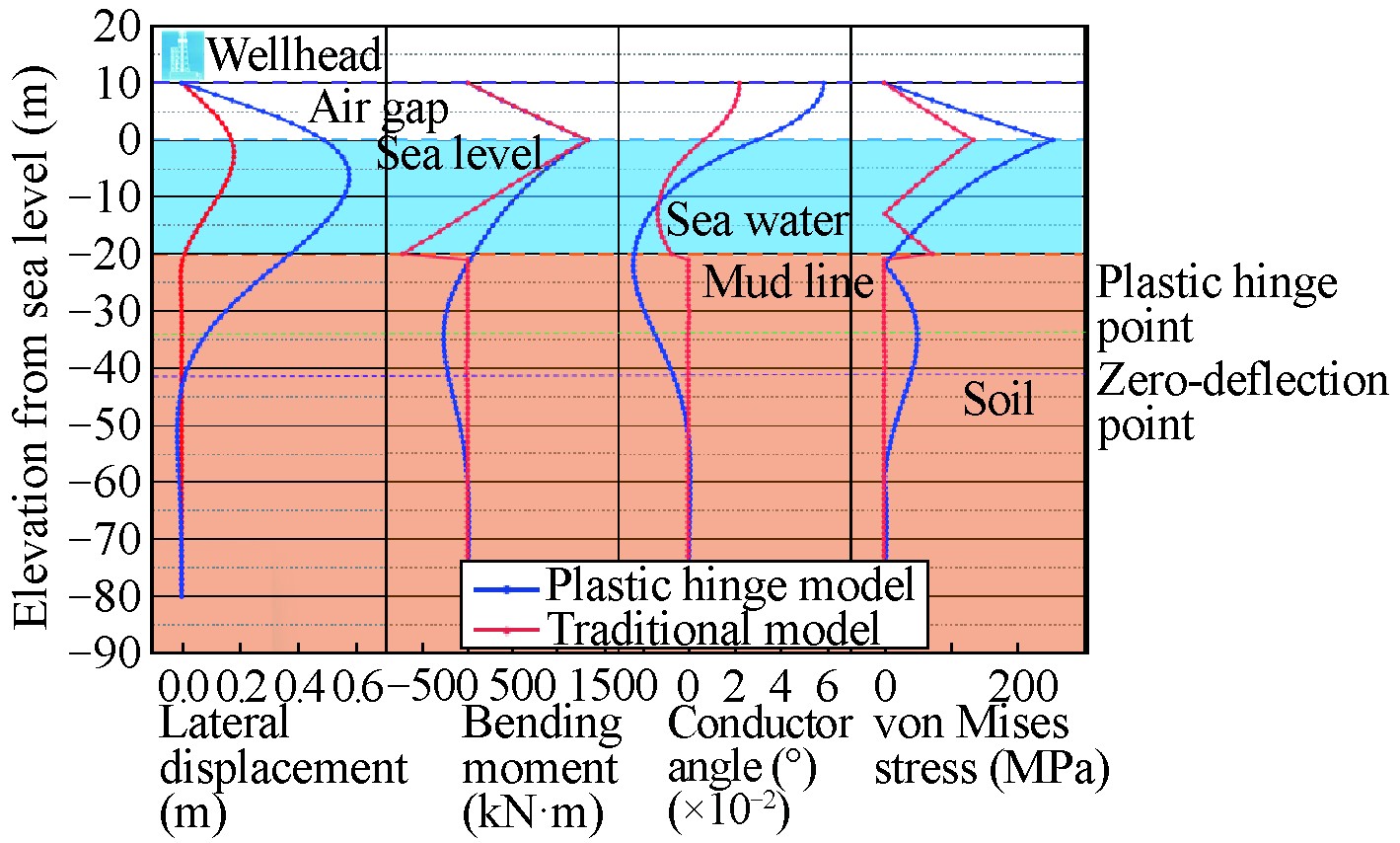
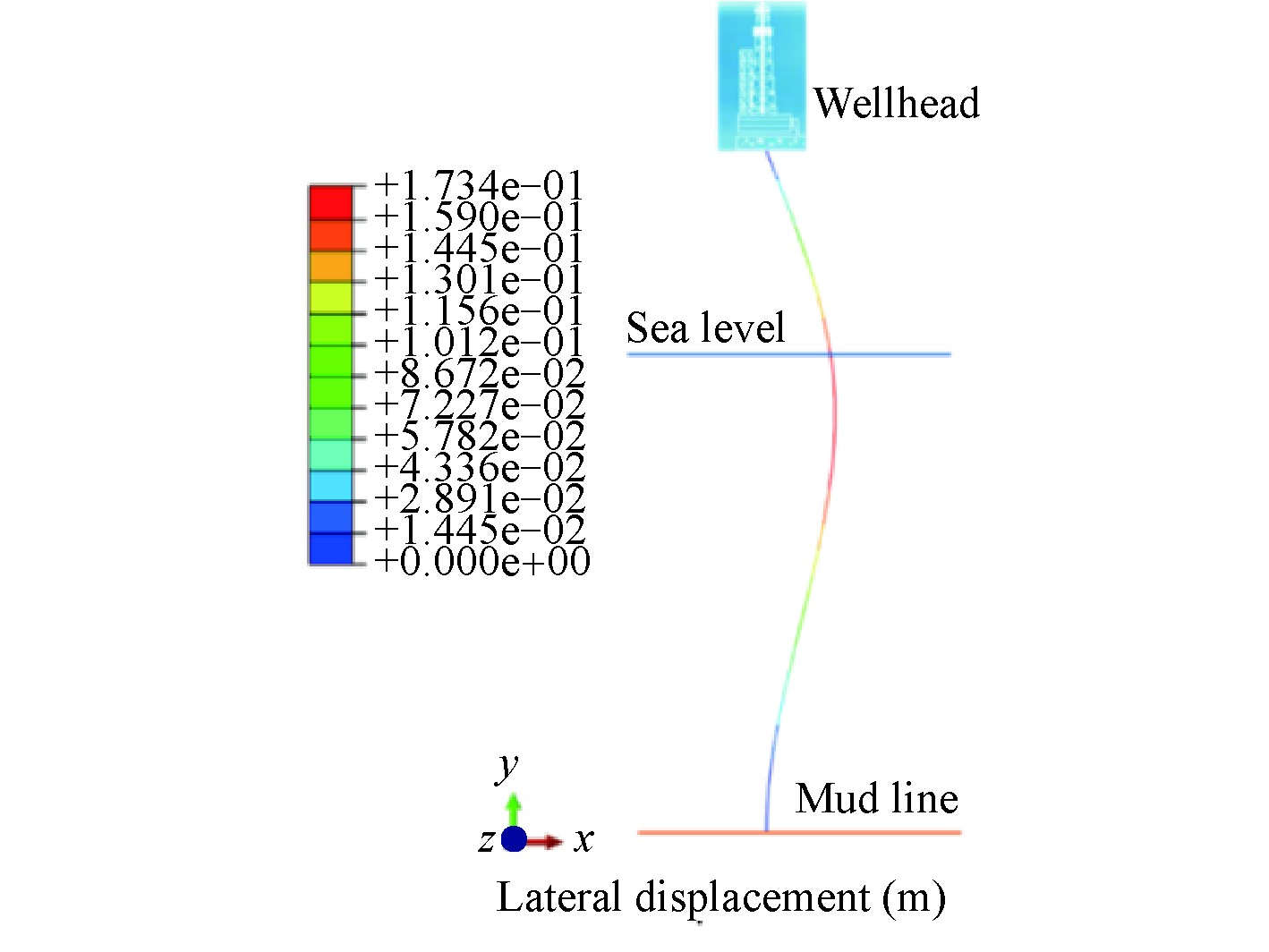
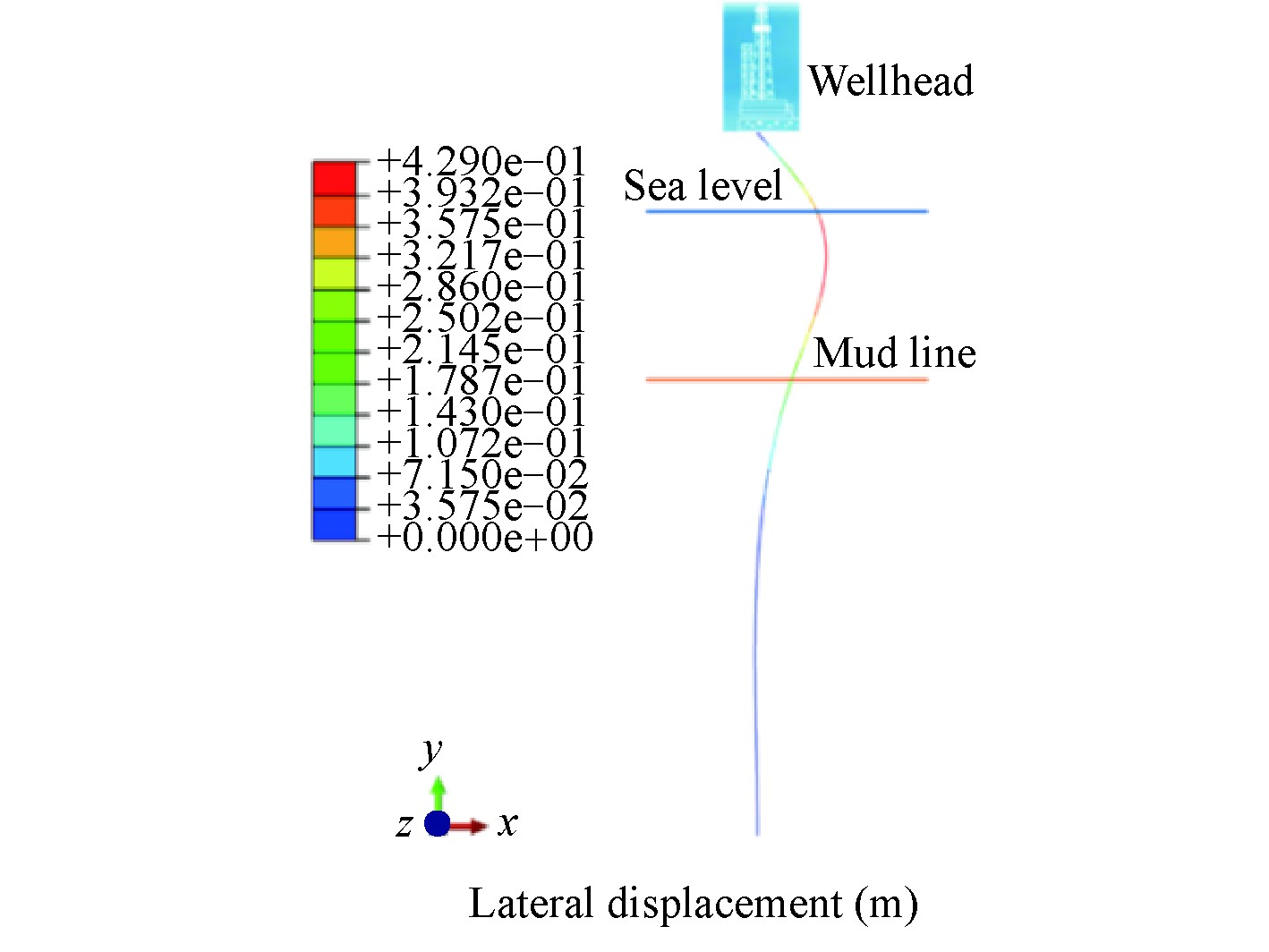
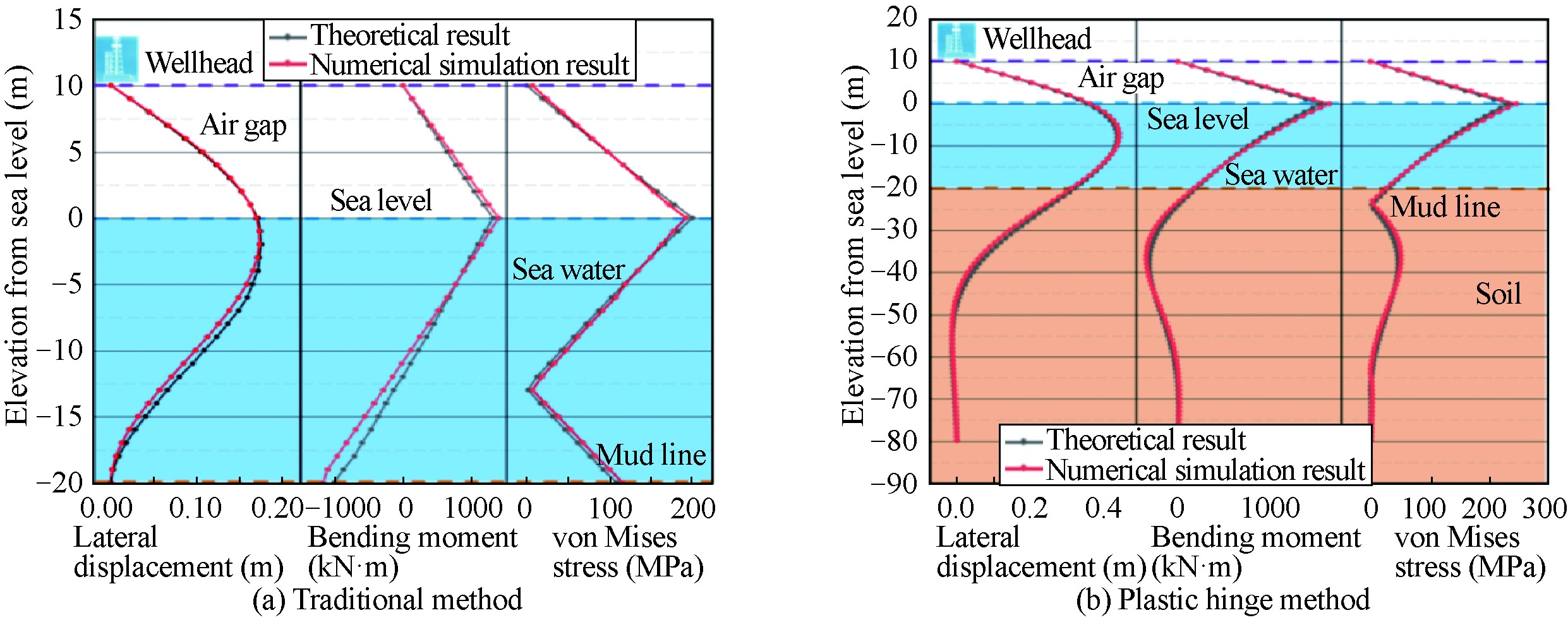
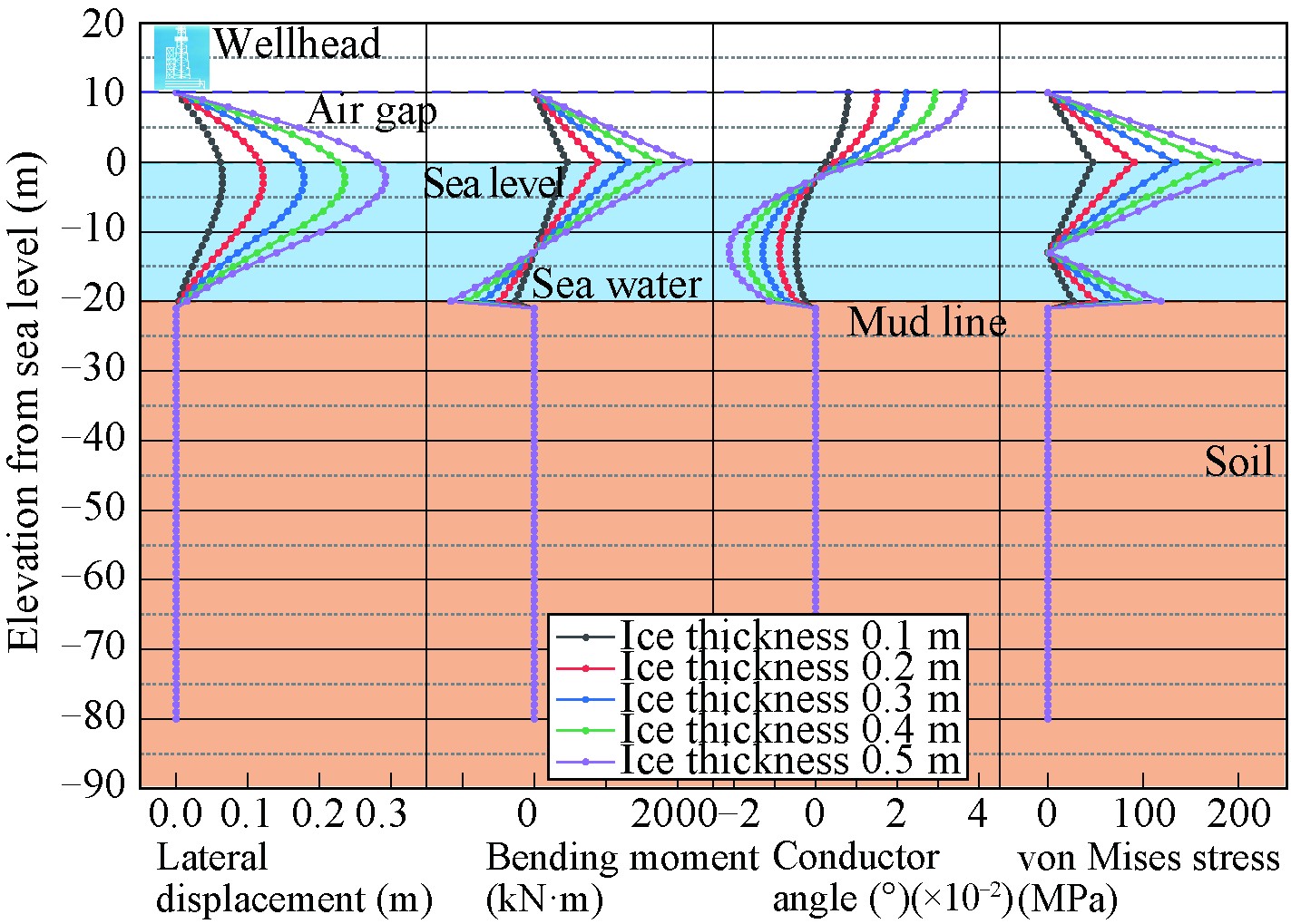
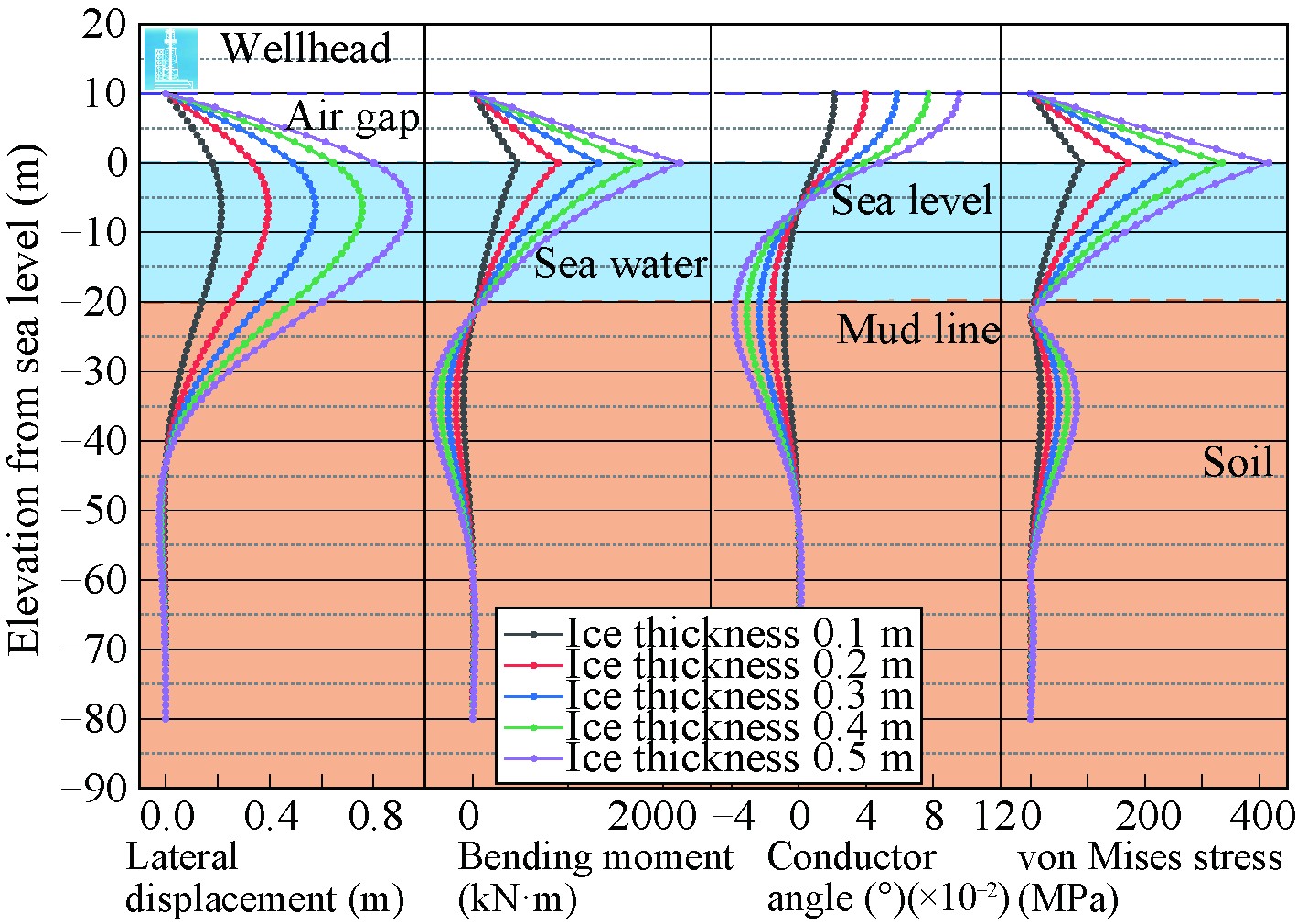
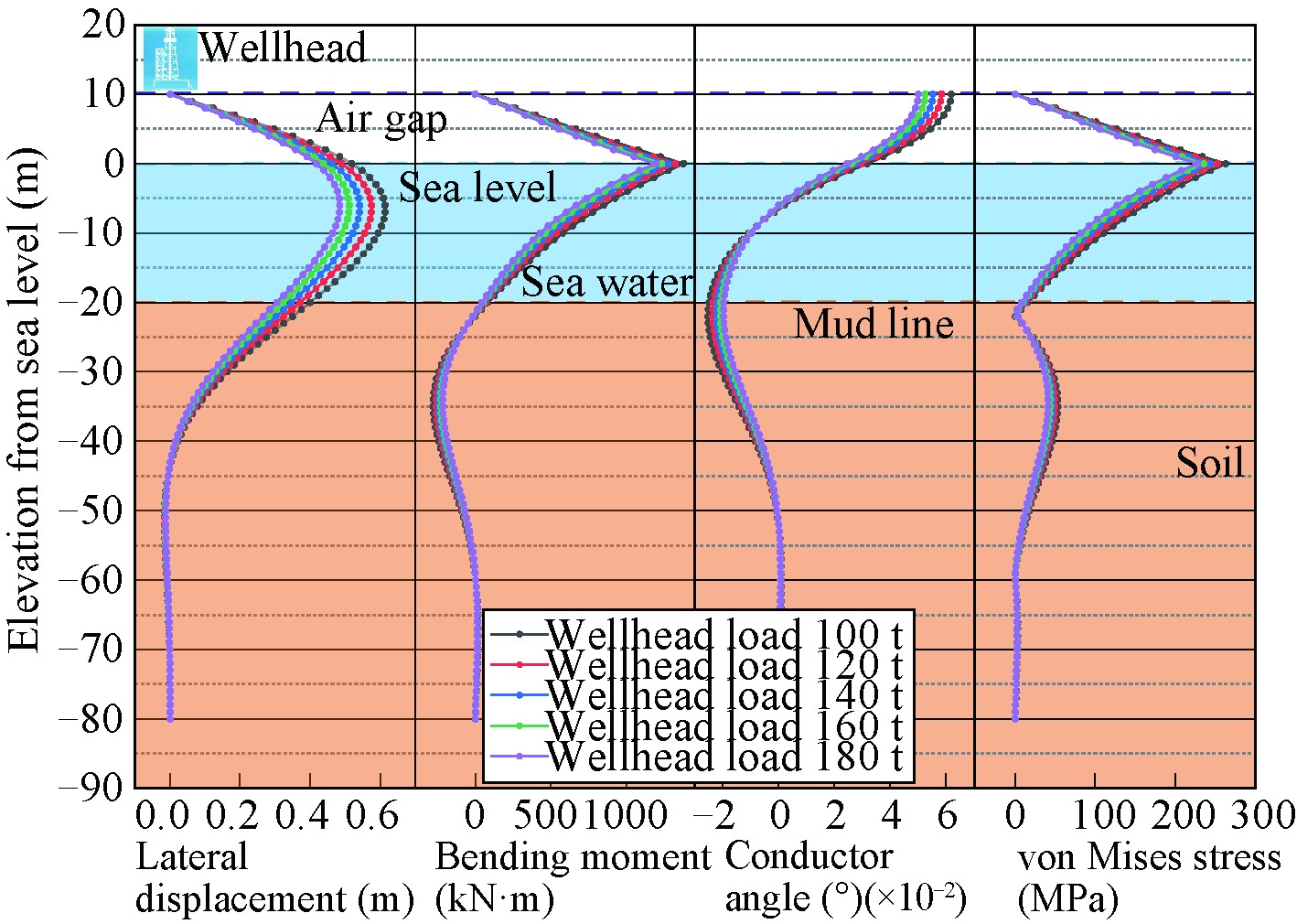
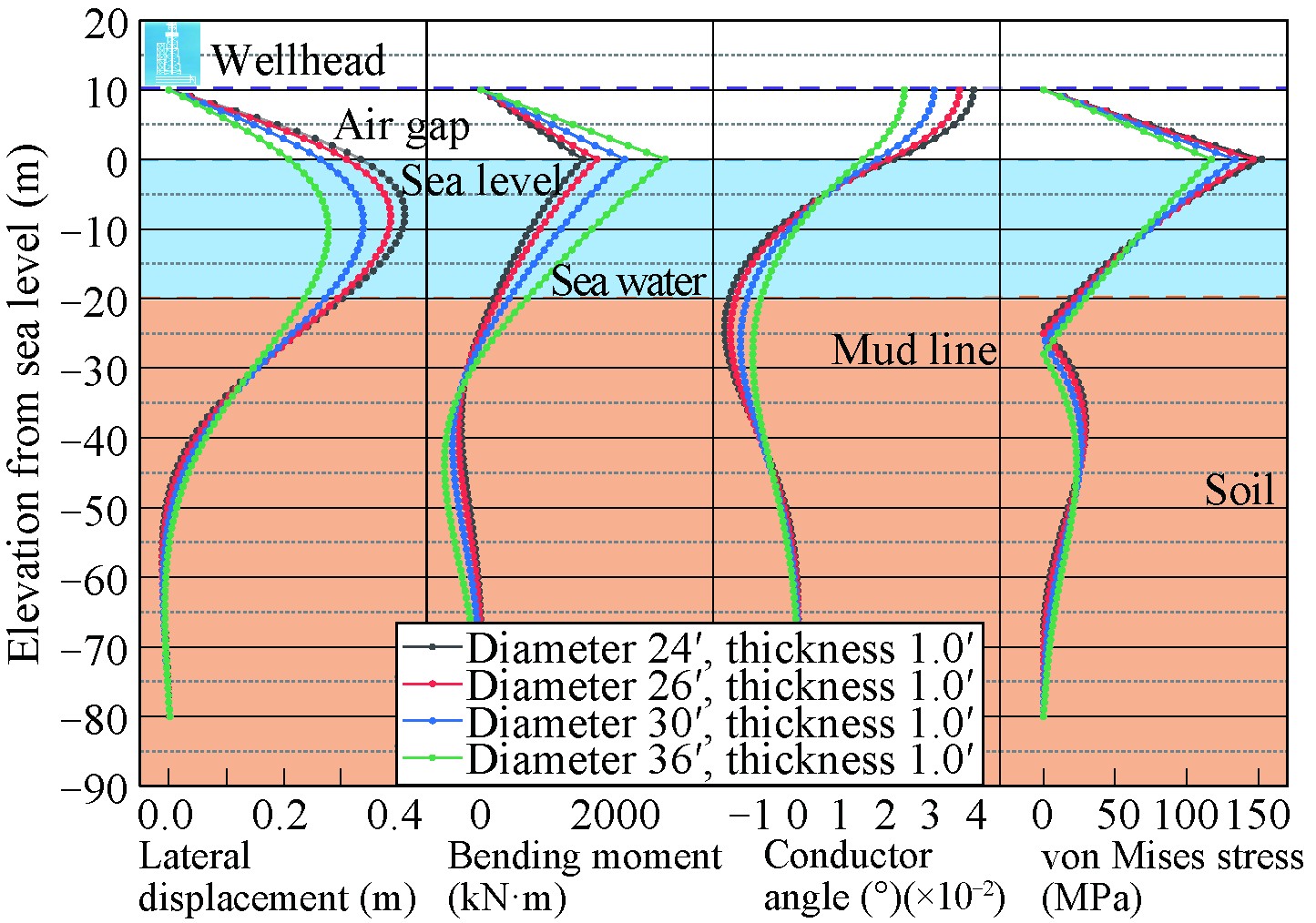
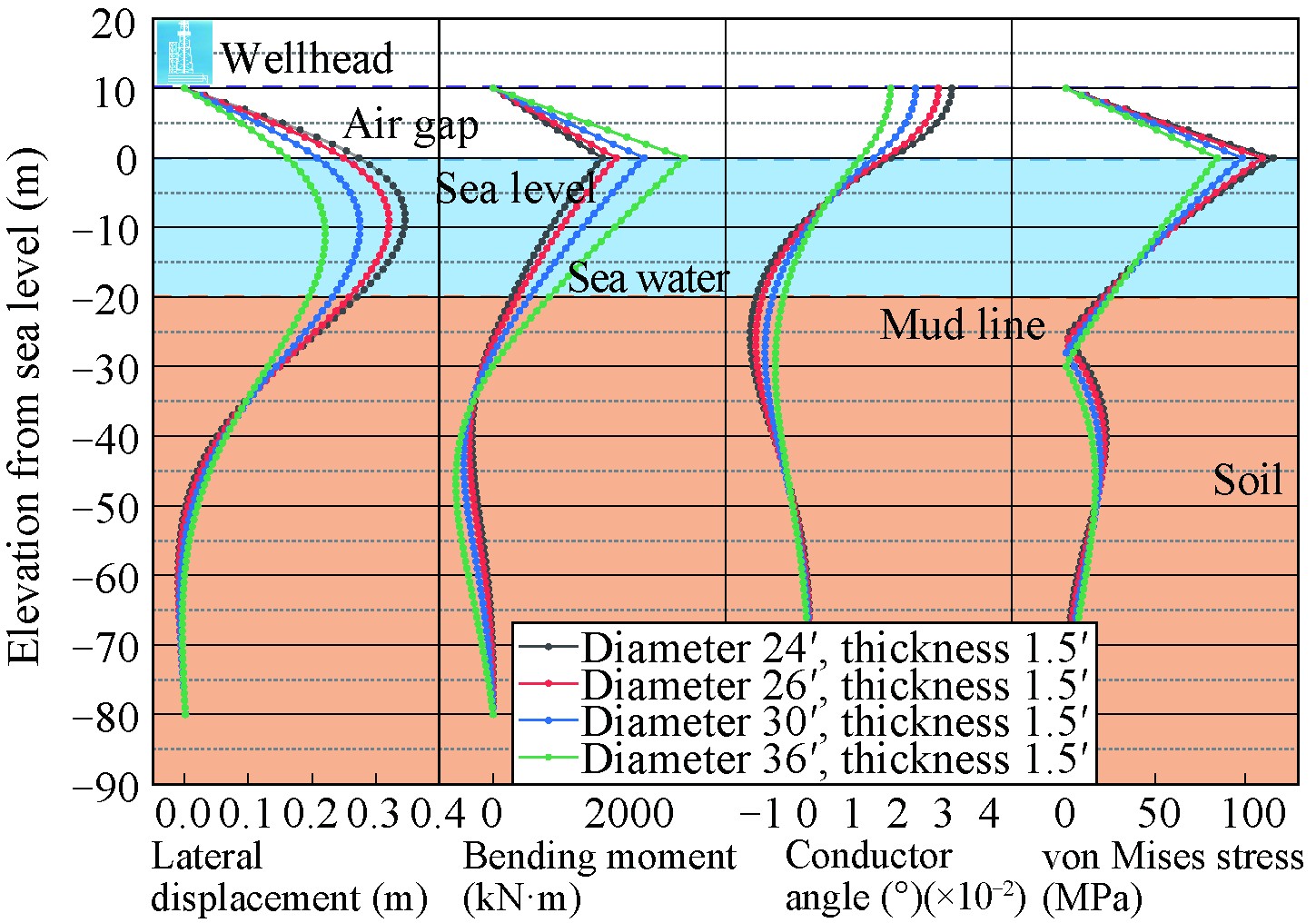
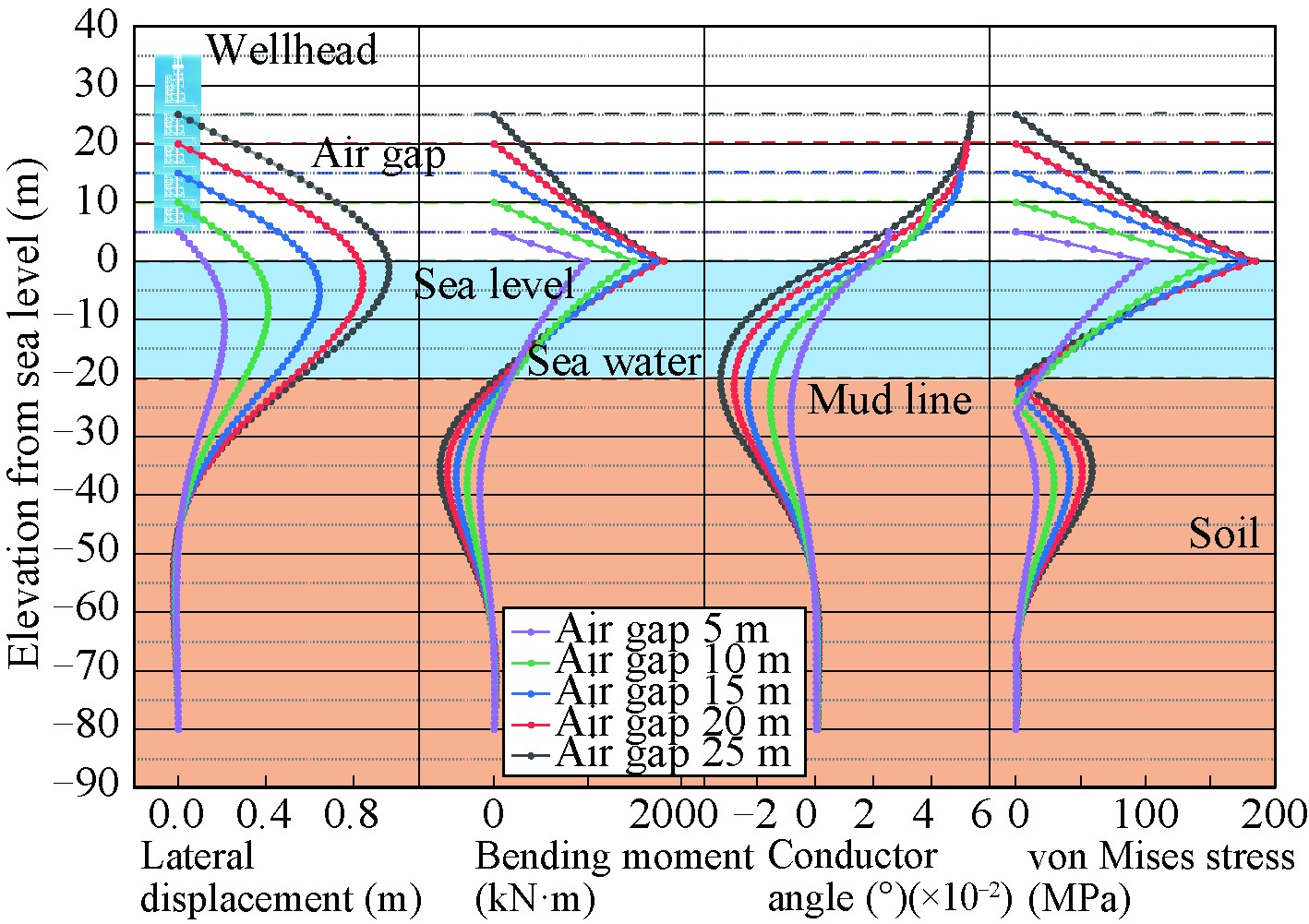
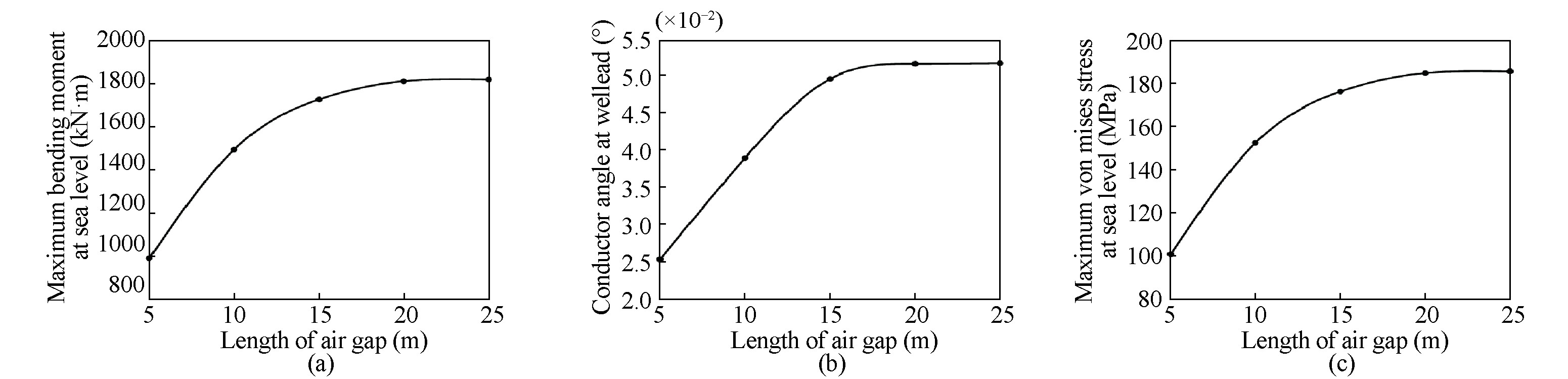
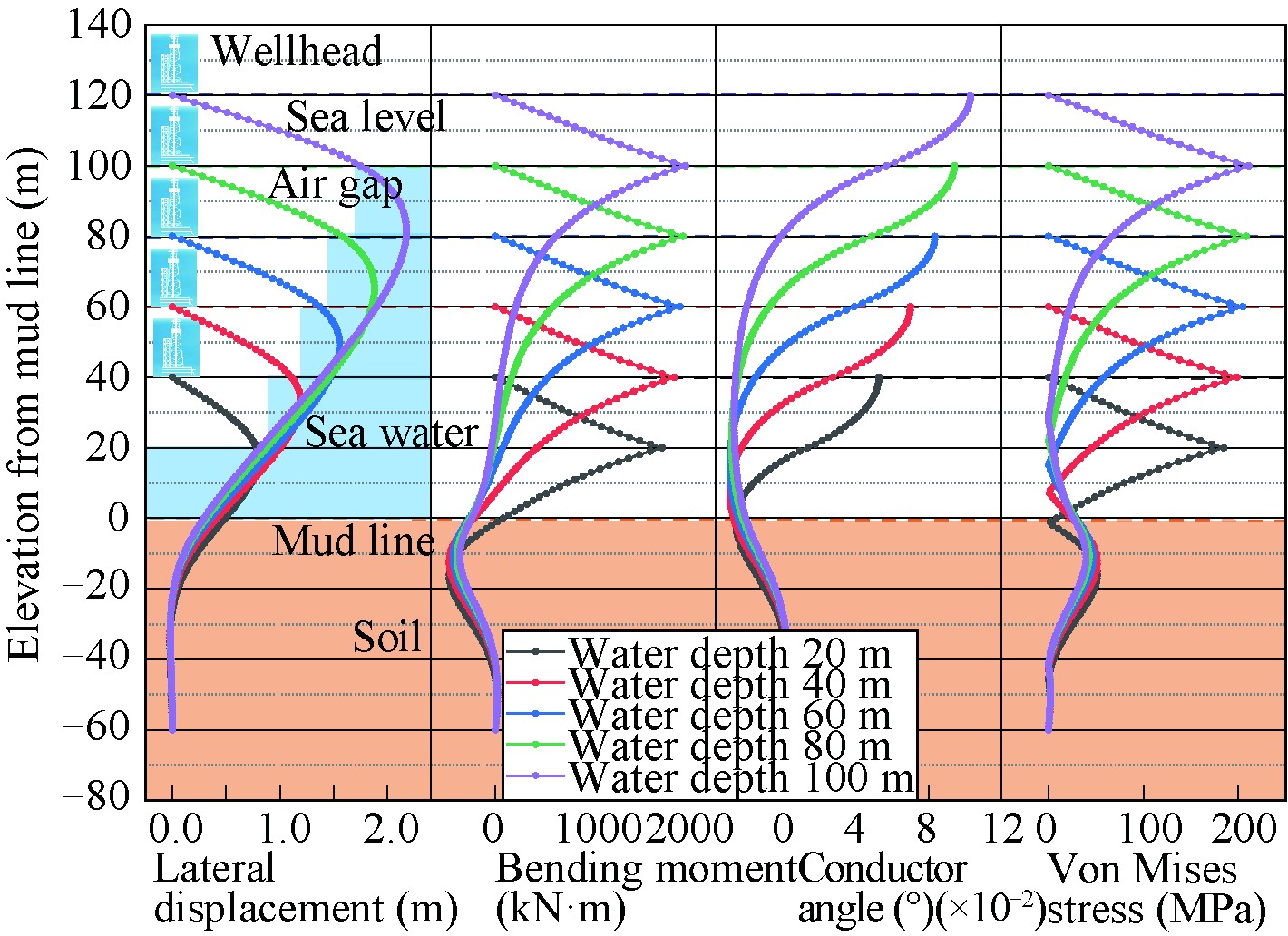
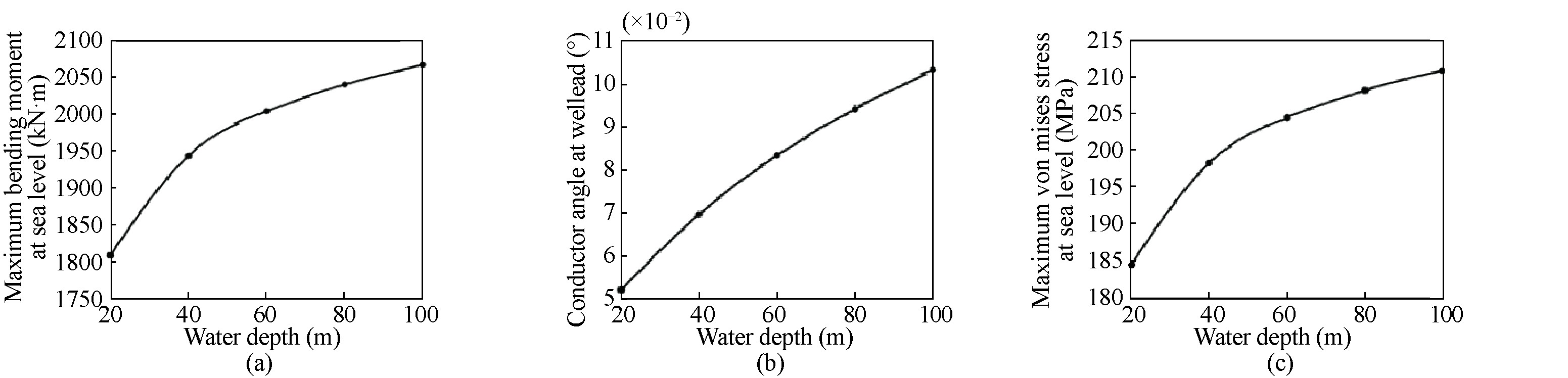
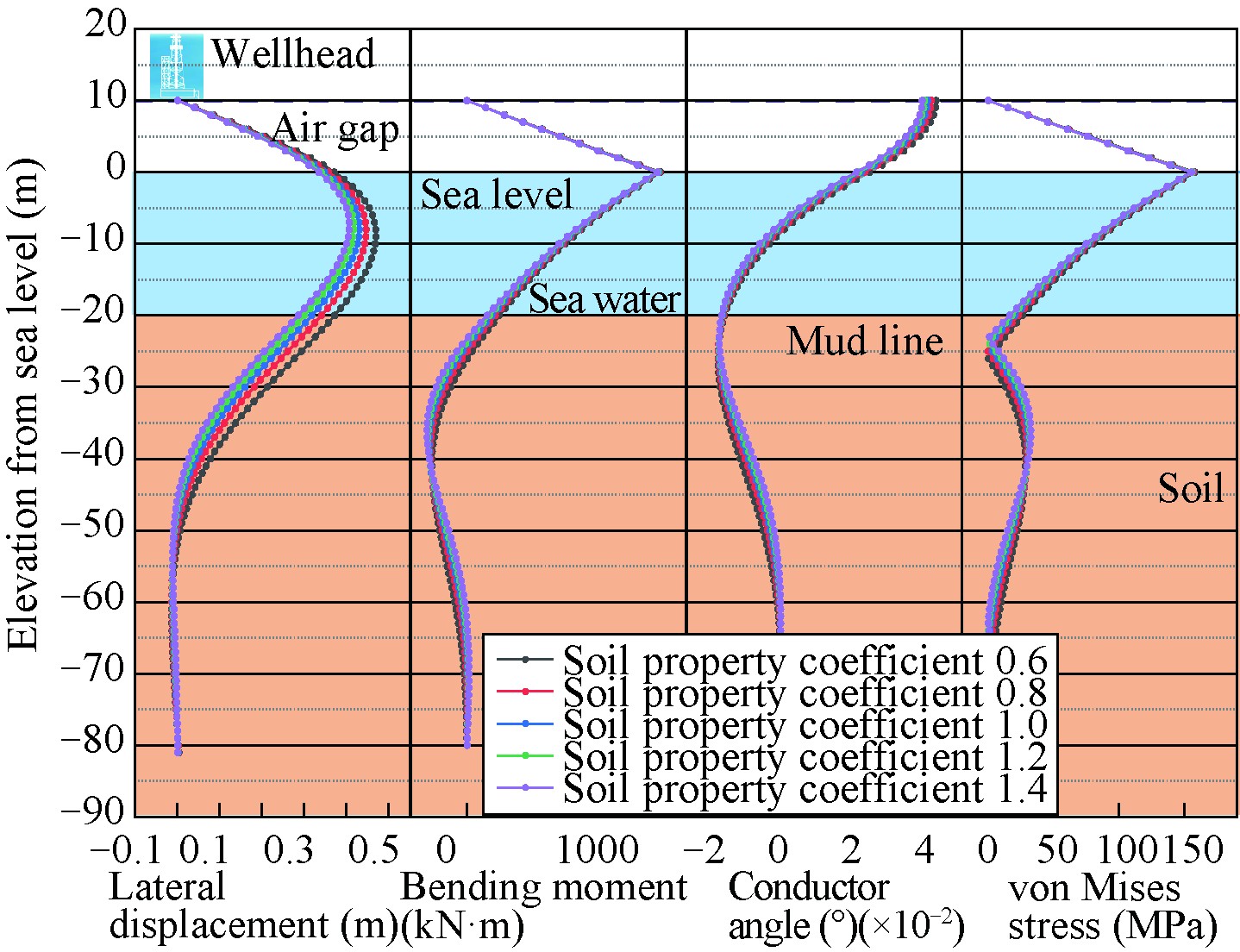
With increasing water depth, marine drilling conductors exhibit higher slenderness ratios, significantly reducing their resistance to environmental loads in Arctic waters. These conductors, when subjected to combined wind, current, and ice loads, may experience substantial horizontal displacements and bending moments, potentially compromising offshore operational safety and wellhead stability. Additionally, soil disturbance near the mudline diminishes the conductor’s bearing capacity, potentially rendering it inadequate for wellhead support and increasing operational risks. This study introduces a static analysis model based on plastic hinge theory to evaluate conductor survivability. The conductor analysis divides the structure into three segments: above waterline, submerged, and embedded below mudline. An idealized elastic-plastic p-y curve model characterizes soil behavior beneath the mudline, while the finite difference method (FDM) analyzes the conductor’s mechanical response under complex pile-head boundary conditions. Numerical simulations using ABAQUS validate the plastic hinge approach against conventional methods, confirming its accuracy in predicting structural performance. These results provide valuable insights for optimizing installation depths and bearing capacity designs of marine drilling conductors in ice-prone regions.
With increasing water depth, marine drilling conductors exhibit higher slenderness ratios, significantly reducing their resistance to environmental loads in Arctic waters. These conductors, when subjected to combined wind, current, and ice loads, may experience substantial horizontal displacements and bending moments, potentially compromising offshore operational safety and wellhead stability. Additionally, soil disturbance near the mudline diminishes the conductor’s bearing capacity, potentially rendering it inadequate for wellhead support and increasing operational risks. This study introduces a static analysis model based on plastic hinge theory to evaluate conductor survivability. The conductor analysis divides the structure into three segments: above waterline, submerged, and embedded below mudline. An idealized elastic-plastic p-y curve model characterizes soil behavior beneath the mudline, while the finite difference method (FDM) analyzes the conductor’s mechanical response under complex pile-head boundary conditions. Numerical simulations using ABAQUS validate the plastic hinge approach against conventional methods, confirming its accuracy in predicting structural performance. These results provide valuable insights for optimizing installation depths and bearing capacity designs of marine drilling conductors in ice-prone regions.

ScholarOne Manuscripts Log In
Current Issue

- Volume 39
- Issue 5
- October 2025
- Editor-in-Chief:
- Superintended by:
CHINA ASSOCIATION FOR SCIENCE AND TECHNOLOGY
- Sponsored by:
Chinese Ocean Engineering Society (COES)
- Edited by:
Nanjing Hydraulic Research Institute
Highlights
Stay up to Date
 Article abstracts by RSS
Article abstracts by RSS E-mail Alerts
E-mail Alerts